Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności Fizyka – wyklad 2 dla studentów kierunku Informatyka Wydzial Automatyki, Elektroniki i Informatyki Politechnika Śląska Jacek Pawlyta 15 października 2007r. Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Kinematyka,Dynamika,
Elementy Szczególnej Teorii WzględnościFizyka – wykład 2dla studentów kierunku
InformatykaWydział Automatyki, Elektroniki i Informatyki
Politechnika Śląska
Jacek Pawlyta
15 października 2007r.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu bez uwzględniania przyczyn ruchu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie toru – równanie opisujące ślad jaki ciało zakreśla wprzestrzeni,
f (x , y , z)
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie toru – równanie opisujące ślad jaki ciało zakreśla wprzestrzeni,
f (x , y , z)
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie toru – równanie opisujące ślad jaki ciało zakreśla wprzestrzeni,
f (x , y , z)
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Kinematyka – opis ruchu
równanie ruchu – zależność położenia w przestrzeni od czasu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Kinematyka – opis ruchu
równanie ruchu – zależność położenia w przestrzeni od czasu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie ruchu – zależność położenia w przestrzeni od czasu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie ruchu – zależność położenia w przestrzeni od czasu
f (t), x(t), y(t), z(t)
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – prędkość
−→v (t) = d−→r (t)dt
= lim∆t→0
−→r (t +∆t)−−→r (t)∆t
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – prędkość kątowa
−→ω (t) = d−→ϕ (t)dt
= lim∆t→0
−→ϕ (t +∆t)−−→ϕ (t)∆t
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – przyspieszenie
−→a (t) = d−→v (t)dt
= lim∆t→0
−→v (t +∆t)−−→v (t)∆t
−→a (t) = d−→r 2(t)dt2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – przyspieszenie kątowe
−→ε (t) = d−→ω (t)dt
= lim∆t→0
−→ω (t +∆t)−−→ω (t)∆t
−→ε (t) = d−→ϕ 2(t)dt2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny (prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny (prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny
(prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny (prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny (prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny (prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny (prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny
(prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny (prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny (prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – uwzględnienie sił działających na ciała i będącychprzyczynami powstania ruchu, bądź zmiany ruchu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

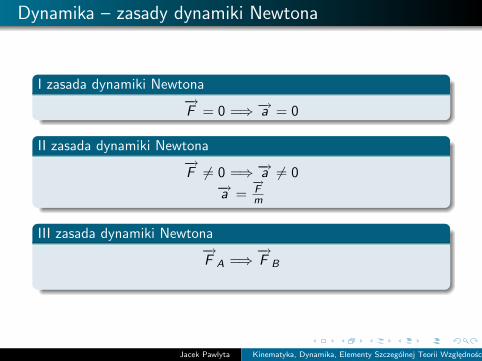
Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona
−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0
=⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona
−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0
=⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0
−→a =−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona
−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A
=⇒−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B
−→F A =
−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Układ inercjalny (galileuszowski) – poruszający się względeminnego układu ruchem jednostajnym prostoliniowym.
Względność ruchu – dla układów inercjalnych nie ma możliwościstwierdzenia, który znajduje się w ruchu, a który nie!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Układ inercjalny (galileuszowski) – poruszający się względeminnego układu ruchem jednostajnym prostoliniowym.Względność ruchu – dla układów inercjalnych nie ma możliwościstwierdzenia, który znajduje się w ruchu, a który nie!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Układ inercjalny (galileuszowski) – poruszający się względeminnego układu ruchem jednostajnym prostoliniowym.Względność ruchu – dla układów inercjalnych nie ma możliwościstwierdzenia, który znajduje się w ruchu, a który nie!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Układ inercjalny (galileuszowski) – poruszający się względeminnego układu ruchem jednostajnym prostoliniowym.Względność ruchu – dla układów inercjalnych nie ma możliwościstwierdzenia, który znajduje się w ruchu, a który nie!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Transformacja Galileusza
x = x ′ + v · t,y = y ′,z = z ′.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Transformacja Galileusza
x = x ′ + v · t,y = y ′,z = z ′.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Transformacja Galileusza
prędkość światła
Obserwacje obiektów poruszających z prędkościami zbliżonymi doc nie zgadazają się z przewidywaniami transformacji Galileusza!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Postulaty1 Prędkość światła w próżni jest taka sama we wszystkichukładch inercjalnych i nie zależy od ruchu źródła światła.
Jest to graniczna prędkość przekazywania sygnałów(informacji) i poruszania się cząstek.
2 Wszelkie prawa fizyki są identyczne we wszystkich inercjalnychukładach odniesienia.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Postulaty1 Prędkość światła w próżni jest taka sama we wszystkichukładch inercjalnych i nie zależy od ruchu źródła światła.Jest to graniczna prędkość przekazywania sygnałów(informacji) i poruszania się cząstek.
2 Wszelkie prawa fizyki są identyczne we wszystkich inercjalnychukładach odniesienia.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Postulaty1 Prędkość światła w próżni jest taka sama we wszystkichukładch inercjalnych i nie zależy od ruchu źródła światła.Jest to graniczna prędkość przekazywania sygnałów(informacji) i poruszania się cząstek.
2 Wszelkie prawa fizyki są identyczne we wszystkich inercjalnychukładach odniesienia.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Konsekwencje1 Dylatacja (wydłużenie) czasu
∆t = ∆t′√1− v2c2
2 Kontracja (skrócenie) długości
l = l0 ·√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Konsekwencje1 Dylatacja (wydłużenie) czasu∆t = ∆t′√
1− v2c2
2 Kontracja (skrócenie) długości
l = l0 ·√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Konsekwencje1 Dylatacja (wydłużenie) czasu∆t = ∆t′√
1− v2c2
2 Kontracja (skrócenie) długości
l = l0 ·√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Konsekwencje1 Dylatacja (wydłużenie) czasu∆t = ∆t′√
1− v2c2
2 Kontracja (skrócenie) długości
l = l0 ·√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Transformacja Lorentza
x =x ′ + v · t√1− v2c2
y = y ′
z = z ′
t =t ′ + v · x ′/c2√1− v2c2
x ′ =x − v · t√1− v2c2
y ′ = y
z ′ = z
t ′ =t − v · x/c2√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Interwał czasoprzestrzenny
s =√(x ′ − x)2 + (y ′ − y)2 + (z ′ − z)2 − c2(t ′ − t)2
s2 < 0 – interwał czasowy,s2 > 0 – interwał przestrzenny.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Interwał czasoprzestrzenny
s =√(x ′ − x)2 + (y ′ − y)2 + (z ′ − z)2 − c2(t ′ − t)2
s2 < 0 – interwał czasowy,s2 > 0 – interwał przestrzenny.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Relatywistyczne dodawanie prędkości
v = v ′+v ′′
1+ v′·v′′c2
v <<< c ?
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Relatywistyczne dodawanie prędkości
v = v ′+v ′′
1+ v′·v′′c2
v <<< c ?
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Masa reletywistyczna
m = m0√1− v2c2
Pęd relatywistyczny
p = m · v p = m0√1− v2c2
· v
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Masa reletywistyczna
m = m0√1− v2c2
Pęd relatywistyczny
p = m · v p = m0√1− v2c2
· v
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Energia całkowita
E = m · c2
E = m0√1− v2c2
· c2
Energia spoczynkowa
E0 = m0 · c2
Energia kinetyczna
Ek = E − E0można pokazać (rozwijając 1− (v/c)2 w szereg), że dla v <<< cEk = m·v
2
2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Energia całkowita
E = m · c2E = m0√
1− v2c2
· c2
Energia spoczynkowa
E0 = m0 · c2
Energia kinetyczna
Ek = E − E0można pokazać (rozwijając 1− (v/c)2 w szereg), że dla v <<< cEk = m·v
2
2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Energia całkowita
E = m · c2E = m0√
1− v2c2
· c2
Energia spoczynkowa
E0 = m0 · c2
Energia kinetyczna
Ek = E − E0można pokazać (rozwijając 1− (v/c)2 w szereg), że dla v <<< cEk = m·v
2
2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Energia całkowita
E = m · c2E = m0√
1− v2c2
· c2
Energia spoczynkowa
E0 = m0 · c2
Energia kinetyczna
Ek = E − E0można pokazać (rozwijając 1− (v/c)2 w szereg), że dla v <<< cEk = m·v
2
2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Related Documents





![Fizyka dla Informatyków Wyk ad 3 [0.3cm] KINEMATYKA …Fizyka dla Informatyków Wykład 3 KINEMATYKA PUNKTU MATERIALNEGO RomualdKotowski KatedraZastosowańInformatyki PJWSTK2009](https://static.cupdf.com/doc/110x72/60651a610a733952530c0376/fizyka-dla-informatykw-wyk-ad-3-03cm-kinematyka-fizyka-dla-informatykw-wykad.jpg)





