MEAM 535 University of Pennsylvania 1 Kinematics Velocity and Acceleration Analysis

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
MEAM 535
University of Pennsylvania 1
Kinematics
Velocity and Acceleration Analysis

MEAM 535
University of Pennsylvania 2
General Approach to Analyzing Multi-Body System
1. Points common to adjacent bodies
3. Pair of points on adjacent bodies whose relative motions can be easily described
2. Pair of points fixed to the same body
4. Write equations relating pairs of points either on same or adjacent bodies.

MEAM 535
University of Pennsylvania 4
Differentiation of vectors 2. Vector not fixed to B
A
B O
P r b1
b2 b3
r can be any vector
Recall
MEAM 535
University of Pennsylvania 5
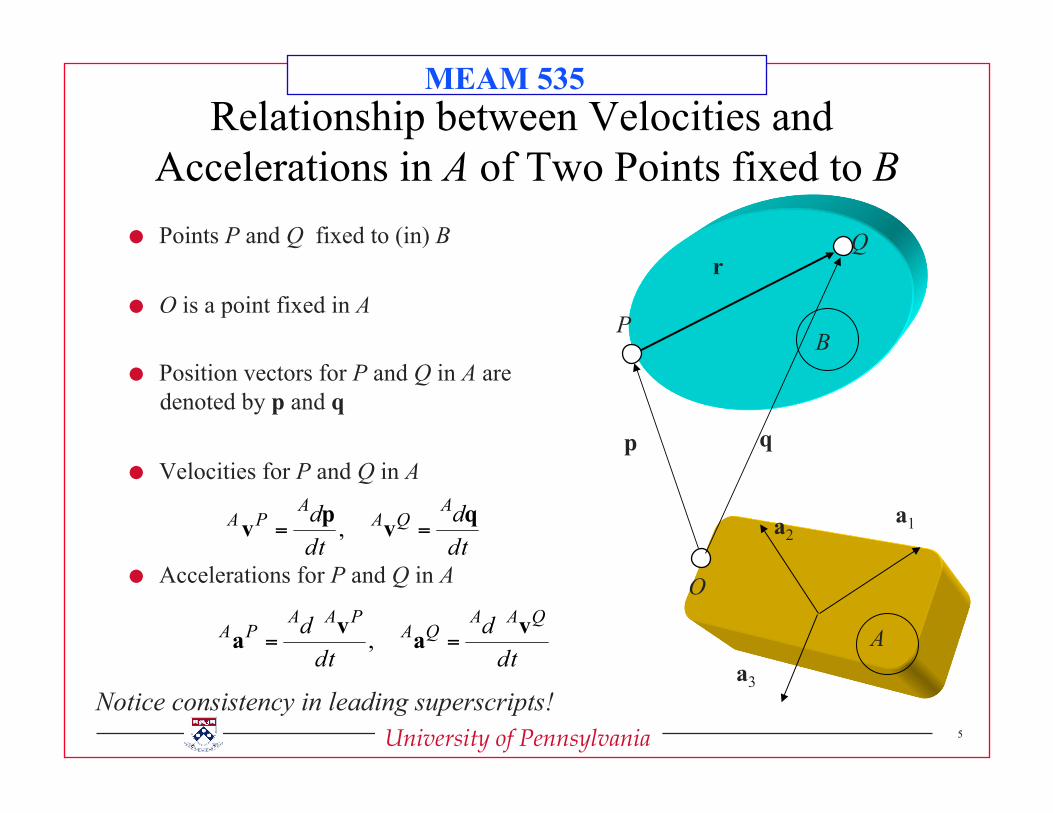
Relationship between Velocities and Accelerations in A of Two Points fixed to B
Points P and Q fixed to (in) B
O is a point fixed in A
Position vectors for P and Q in A are denoted by p and q
Velocities for P and Q in A
Accelerations for P and Q in A
B
r
a1
a3
a2
P
Q
O
A
p q
Notice consistency in leading superscripts!

MEAM 535
University of Pennsylvania 6
Velocities of P and Q (both fixed in A)
Triangle law of vector addition for points P and Q
q = p + r
B
r
a1
a3
a2
P
Q
O
A
p q
Differentiate both sides
Substitute definitions of velocities
Velocities for P and Q in A
0
MEAM 535
University of Pennsylvania 7
Angular Acceleration The angular acceleration of B in A, denoted by AαB, is defined as the first time-derivative in A of the angular velocity of B in A:
€
Aα B =A ddt
AωB( )
Notice consistency in leading superscripts!
MEAM 535
University of Pennsylvania 8
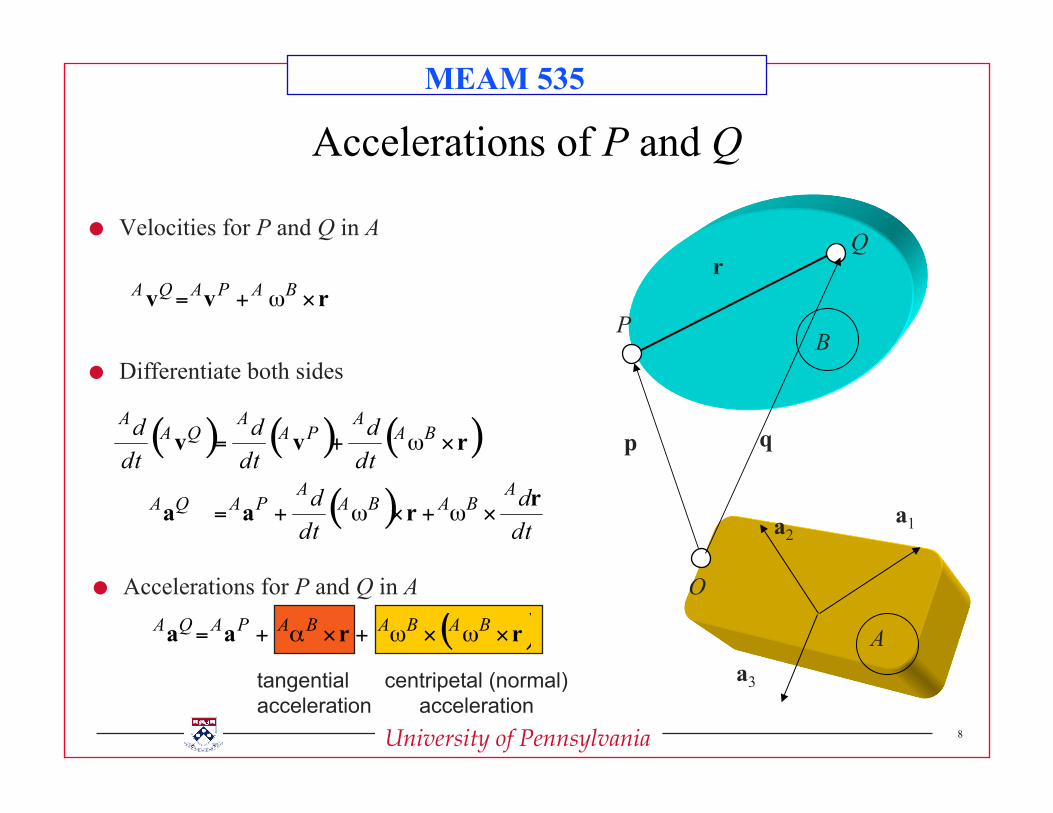
centripetal (normal) acceleration
tangential acceleration
Accelerations of P and Q
Velocities for P and Q in A
B
r
a1
a3
a2
P
Q
O
A
p q
Differentiate both sides
Accelerations for P and Q in A
MEAM 535
University of Pennsylvania 9
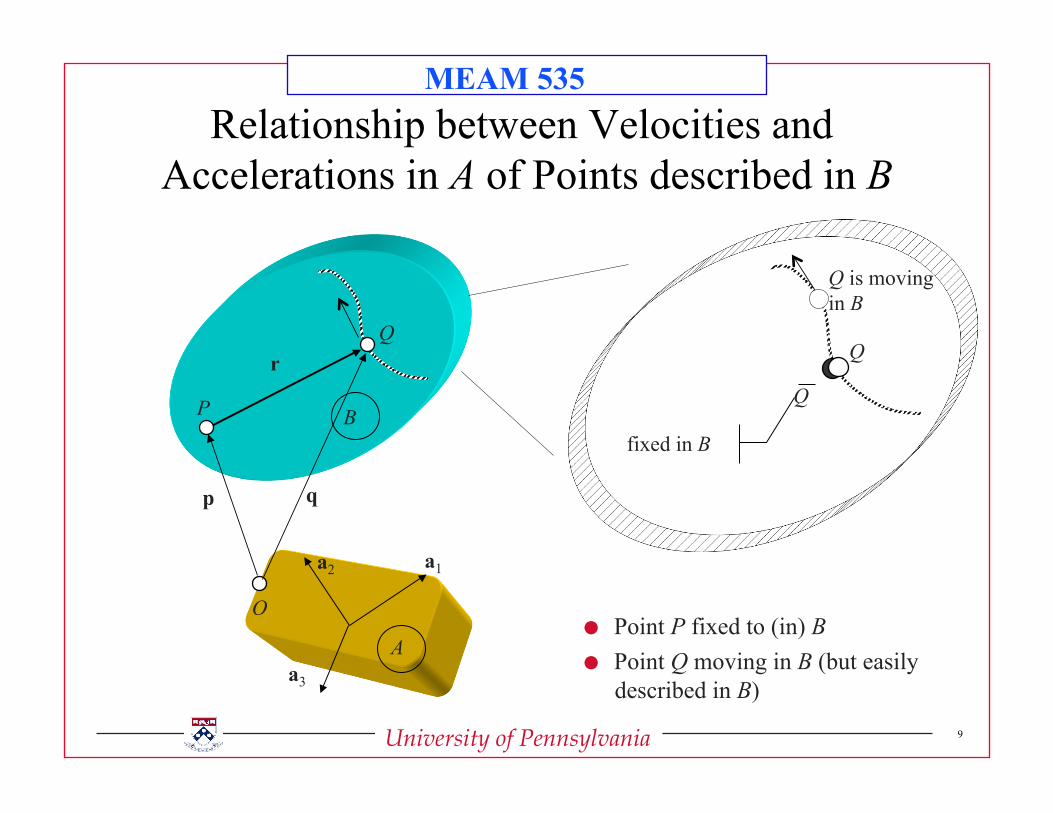
Relationship between Velocities and Accelerations in A of Points described in B
B
r
a1
a3
a2
P
Q
O
A
p q
Q
Q
Q is moving in B
fixed in B
Point P fixed to (in) B Point Q moving in B (but easily
described in B)

MEAM 535
University of Pennsylvania 10 non zero
Triangle law of vector addition for points P and Q
q = p + r Differentiate both sides
Substitute definitions of velocities
Velocities of P and Q
B
r
a1
a3
a2
P
Q
O
A
p q
Velocities for P and Q in A

MEAM 535
University of Pennsylvania 11
Velocity and Acceleration of Q in B
Point Q moving in B has position vector s in B
B
r
a1
a3
a2
P
Q
O
A
p q
Q
Q
Q is moving in B
fixed in B
s
Velocity Acceleration
Note: s may be 0, but v, a may not be!

MEAM 535
University of Pennsylvania 13
Velocities for P and Q in A
Differentiate in A
Acceleration of P and Q
B
r
a1
a3
a2
P
Q
O
A
p q
€
AaQ =A ddt
A vQ( ) =A ddt
A vP( ) +A ddt
B vQ( ) +A ddt
AωB × r( )
€
AaP{ }
€
B ddt
B vQ( ) +A ωB × BvQ
€
A ddt
AωB( ) × r + AωB ×B drdt
+ AωB × r

MEAM 535
University of Pennsylvania 14
Coriolis acceleration
centripetal (normal) acceleration
tangential acceleration
Acceleration of P and Q
B
r
a1
a3
a2
P
Q
O
A
p q Special case: r = 0
MEAM 535
University of Pennsylvania 15
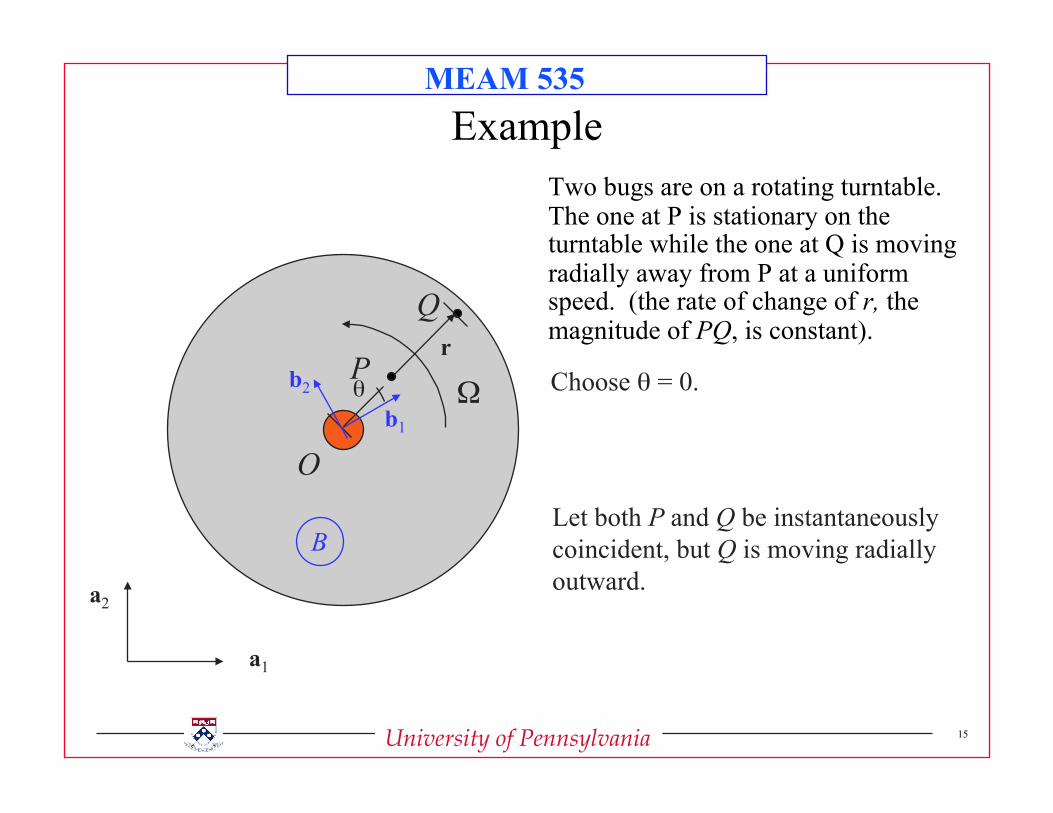
Example Two bugs are on a rotating turntable. The one at P is stationary on the turntable while the one at Q is moving radially away from P at a uniform speed. (the rate of change of r, the magnitude of PQ, is constant).
Ω
r
b1 b2 θ
a1
a2
O
Q
P
B
Choose θ = 0.
Let both P and Q be instantaneously coincident, but Q is moving radially outward.

MEAM 535
University of Pennsylvania 19
Solution
b1 b2
a1 a2 A
C B
ω0
P P
G b2
c2
b3, c3
θ
MEAM 535
University of Pennsylvania 21
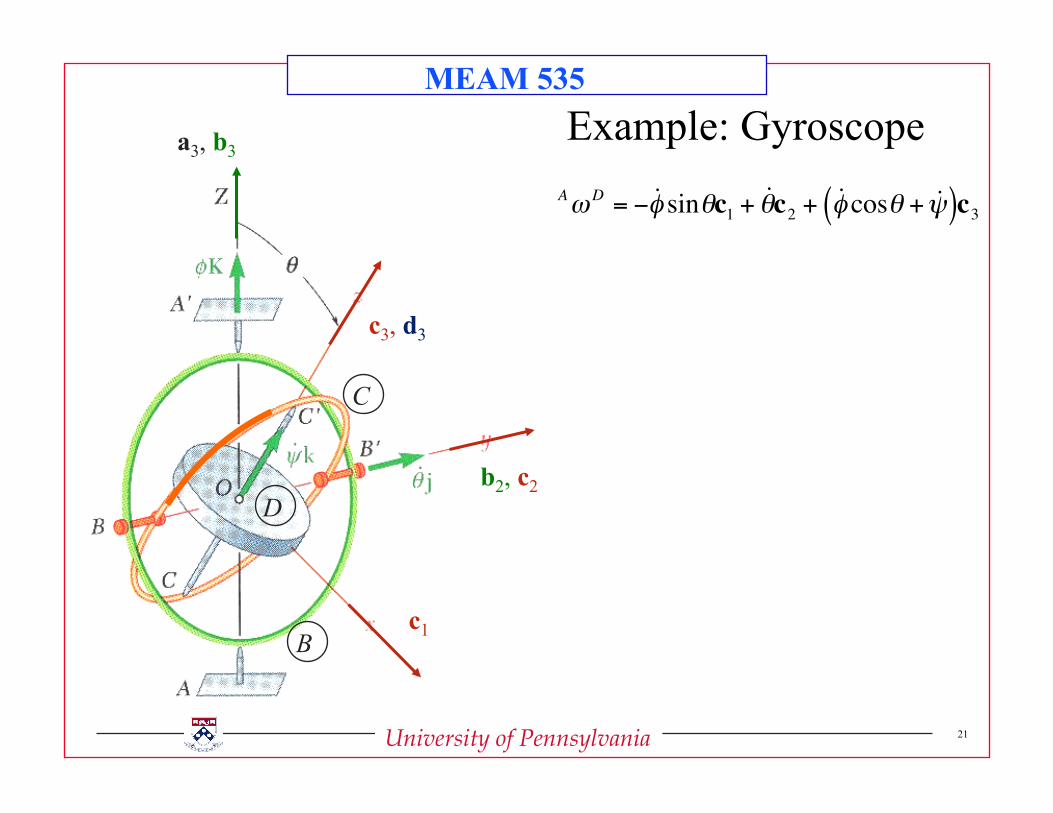
Example: Gyroscope
D
C
B
€
AωD = − ˙ φ sinθc1 + ˙ θ c2 + ˙ φ cosθ + ˙ ψ ( )c3
a3, b3
b2, c2
c3, d3
c1
Related Documents











