Introduction to Embedded Systems EE 454 Embedded Architectures

Introduction to Embedded Systems EE 454 Embedded Architectures.
Dec 26, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Introduction to Embedded Systems
EE 454 Embedded Architectures
Necessity is not the mother of invention…
Laziness is!!
New Gadgets define needs
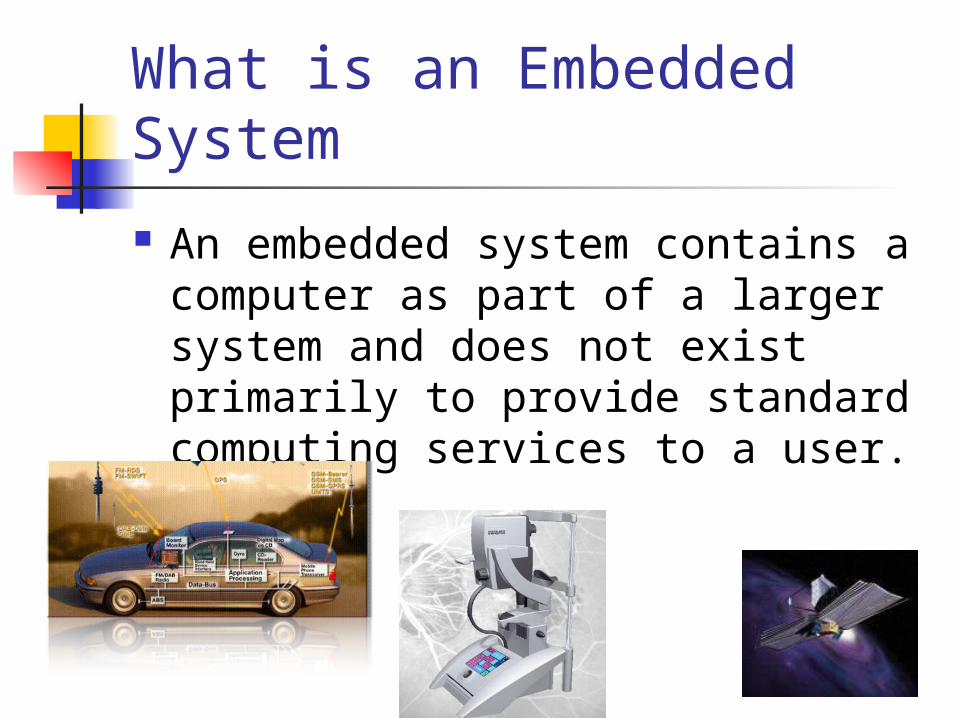
What is an Embedded System
An embedded system contains a computer as part of a larger system and does not exist primarily to provide standard computing services to a user.
Definition
A special-purpose computer system Designed to perform one or a few
dedicated functions, sometimes with real-time computing constraints.
Usually containing sensors and actuators (and its control loop)
Usually embedded as part of another system
Characteristics of Embedded Systems Must be dependable:
Reliability: R(t) = probability of system working correctly provided that is was working at t=0
Maintainability: M(d) = probability of system working correctly d time units after error occurred.
Availability: probability of system working at time t
Safety: no harm to be caused Security: confidential and authentic
communication
Characteristics of Embedded Systems (cont’)
Must be efficient: Energy efficient Code-size efficient (especially for
systems on a chip) Run-time efficient Weight efficient Cost efficient
Characteristics of Embedded Systems (cont’) Many of them must meet real-
time constraints: A real-time system must react to
stimuli from the controlled object (or the operator) within the time interval dictated by the environment.
For real-time systems, right answers arriving too late (or even too early) are wrong.
Characteristics of Embedded Systems (cont’)
Unlike the general purpose computers, an embedded computer must interact with a wide variety of analog and/or digital devices.
Our old friends Maxwell, Faraday, Gauss, and Lenz are there to quickly point out when we’ve violated one of their laws!!
Solving problems are arising from signal coupling, noise, electromagnetic interference, or propagation delays is challenging, but necessary.
Boeing conducted electromagnetic interference testing for the EA-18G program at Patuxent River, Md.
Comparison Embedded Systems
Few applications that are known at design-time.
Not programmable by end user. (?)
Fixed run-time requirements (additional computing power not useful).
Criteria: cost power consumption predictability …
General Purpose Computing
Broad class of applications.
Programmable by end user.
Faster is better. Criteria:
cost average speed
System Specialization The main difference between general purpose
highest volume microprocessors and embedded systems is specialization.
Specialization should respect flexibility application domain specific systems shall cover a
class of applications some flexibility is required to account for late
changes, debugging System analysis required
identification of application properties which can be used for specialization
quantification of individual specialization effects
Design Issues In addition to the design of instruction
set, CPU datapath, CPU control, memory, I/O,
Cost efficiency (least expensive computers able to meet the functional and performance requirements
Recurring cost (strategy: low hardware cost, high software development cost)
Real Time Constraints (soft, hard, firm)
Design Issues (cont’) Programming
Array allocation, algorithmic optimization Cross compiler tools (more buggy)
I/Os are hard to simulate Validation and testing are more difficult Robustness and reliability(e.g. cardiac
pacemaker, unmanned space probes, avionics controllers)
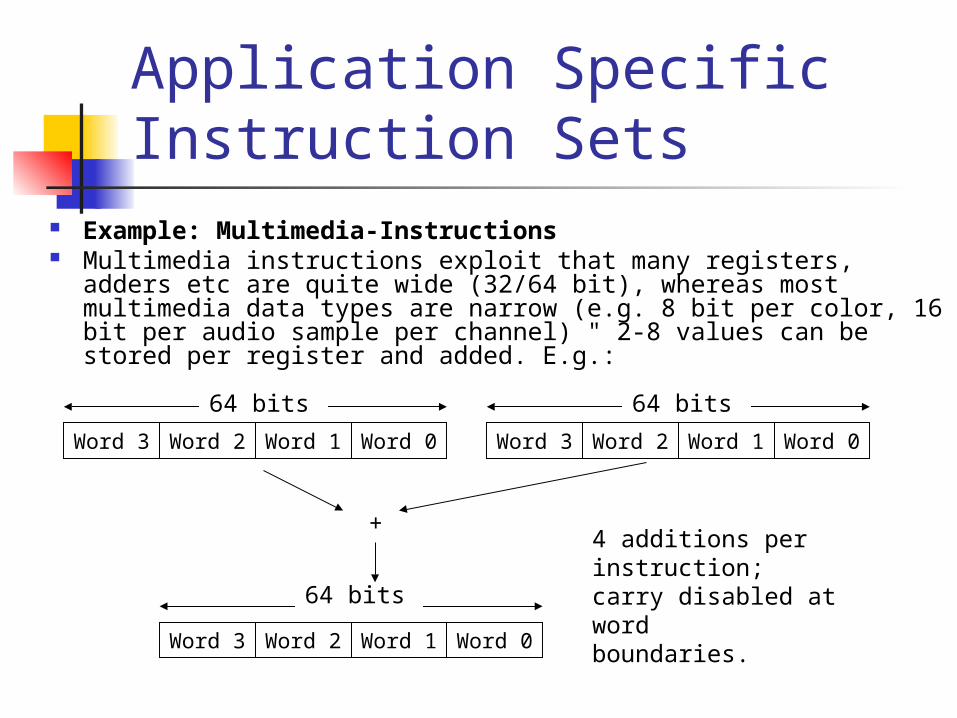
Application Specific Instruction Sets
Example: Multimedia-Instructions Multimedia instructions exploit that many registers, adders etc
are quite wide (32/64 bit), whereas most multimedia data types are narrow (e.g. 8 bit per color, 16 bit per audio sample per channel) " 2-8 values can be stored per register and added. E.g.:
Word 3 Word 2 Word 1 Word 0
64 bits
Word 3 Word 2 Word 1 Word 0
64 bits
Word 3 Word 2 Word 1 Word 0
64 bits
+4 additions per instruction;carry disabled at wordboundaries.
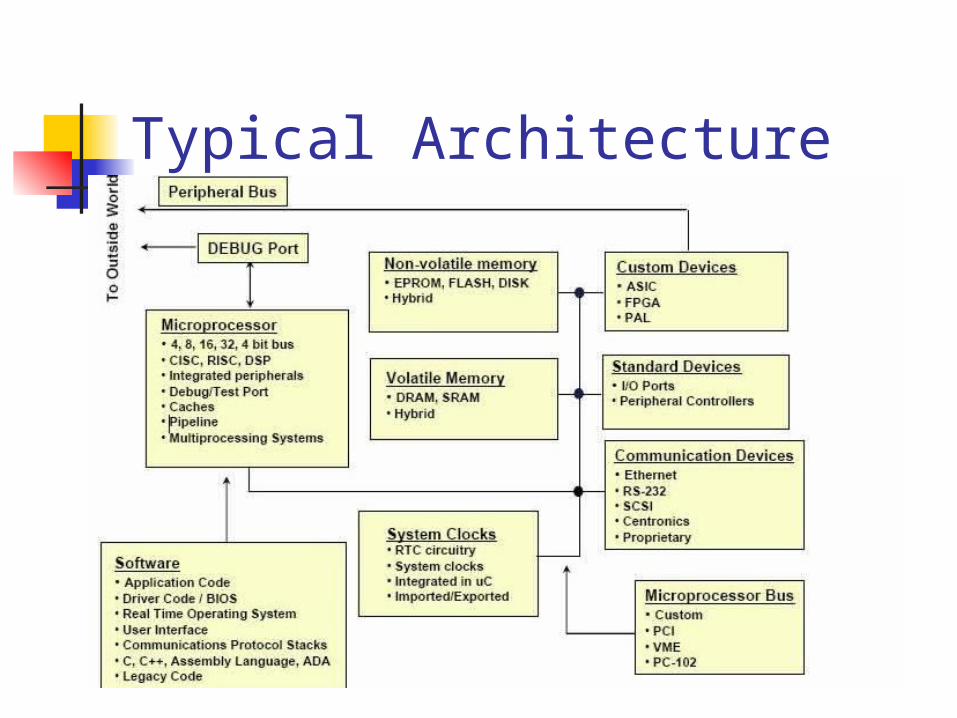
Typical Architecture
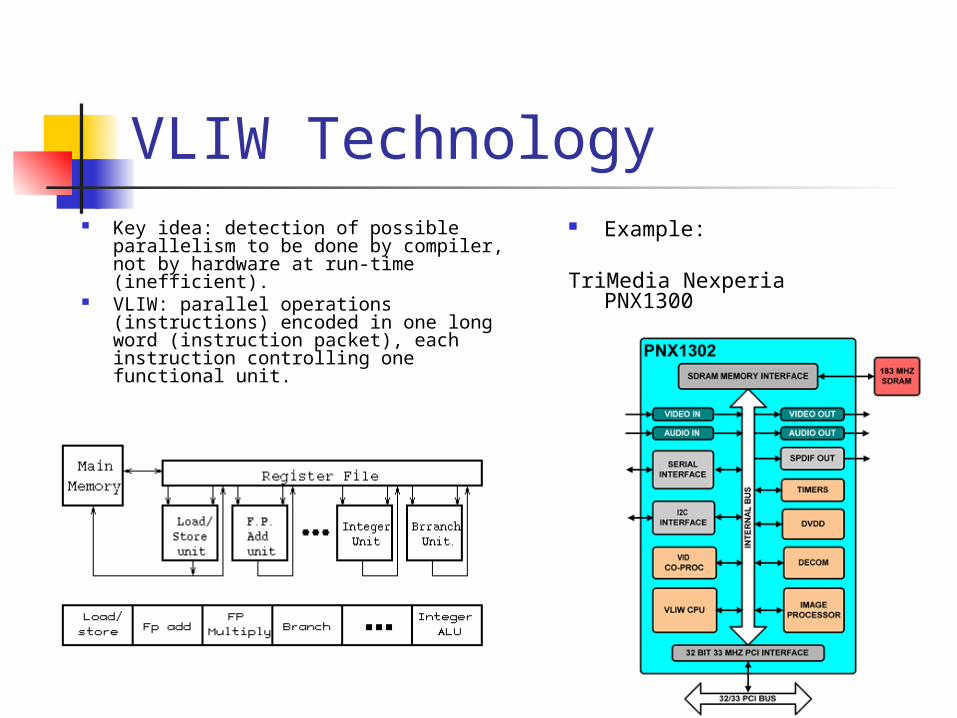
VLIW Technology Key idea: detection of possible
parallelism to be done by compiler, not by hardware at run-time (inefficient).
VLIW: parallel operations (instructions) encoded in one long word (instruction packet), each instruction controlling one functional unit.
Example: TriMedia Nexperia
PNX1300
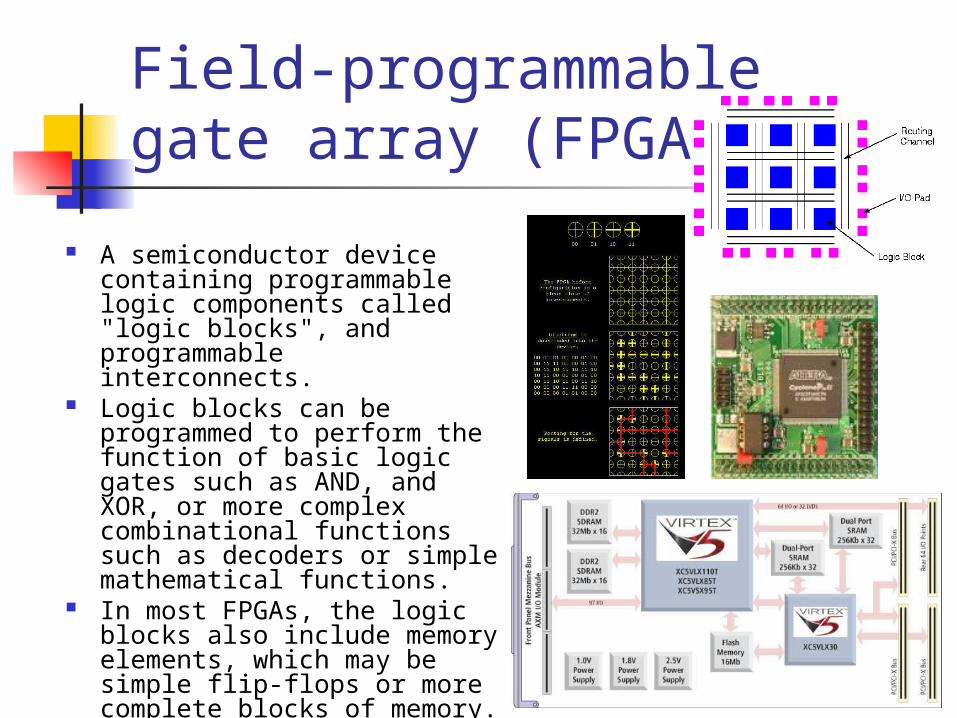
Field-programmable gate array (FPGA)
A semiconductor device containing programmable logic components called "logic blocks", and programmable interconnects.
Logic blocks can be programmed to perform the function of basic logic gates such as AND, and XOR, or more complex combinational functions such as decoders or simple mathematical functions.
In most FPGAs, the logic blocks also include memory elements, which may be simple flip-flops or more complete blocks of memory.
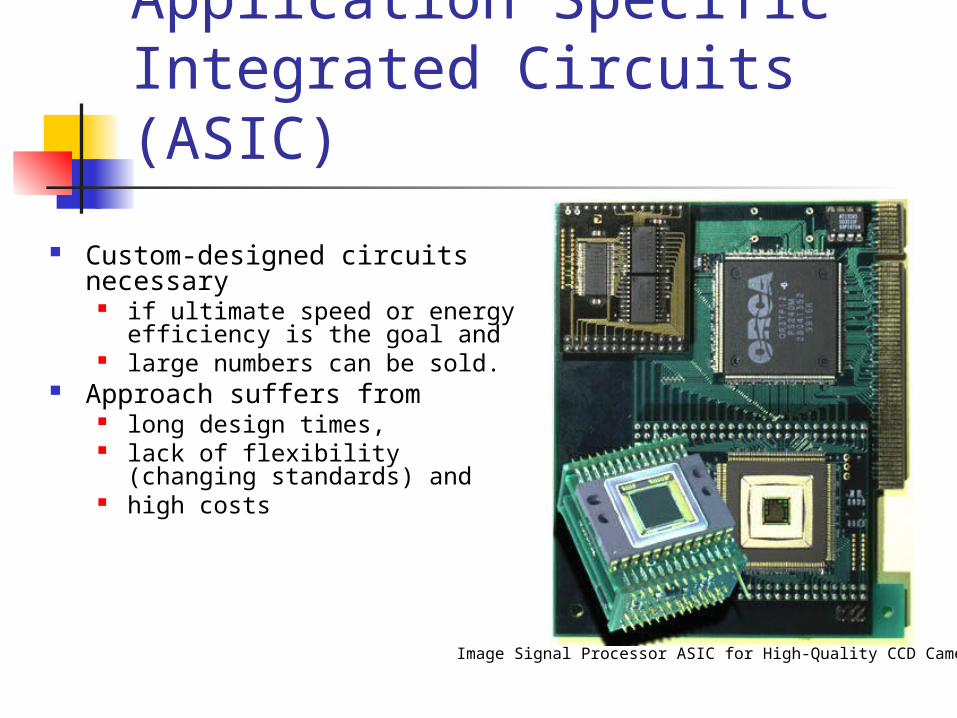
Application Specific Integrated Circuits (ASIC)
Custom-designed circuits necessary
if ultimate speed or energy efficiency is the goal and
large numbers can be sold. Approach suffers from
long design times, lack of flexibility (changing
standards) and high costs
Image Signal Processor ASIC for High-Quality CCD Camera
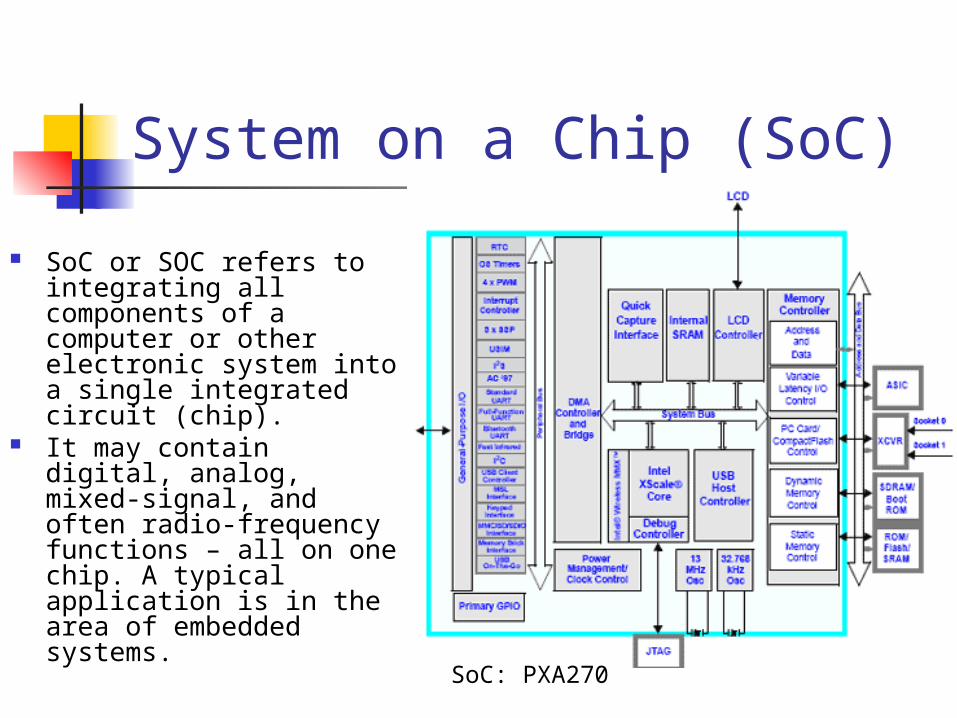
System on a Chip (SoC)
SoC or SOC refers to integrating all components of a computer or other electronic system into a single integrated circuit (chip).
It may contain digital, analog, mixed-signal, and often radio-frequency functions – all on one chip. A typical application is in the area of embedded systems.
SoC: PXA270
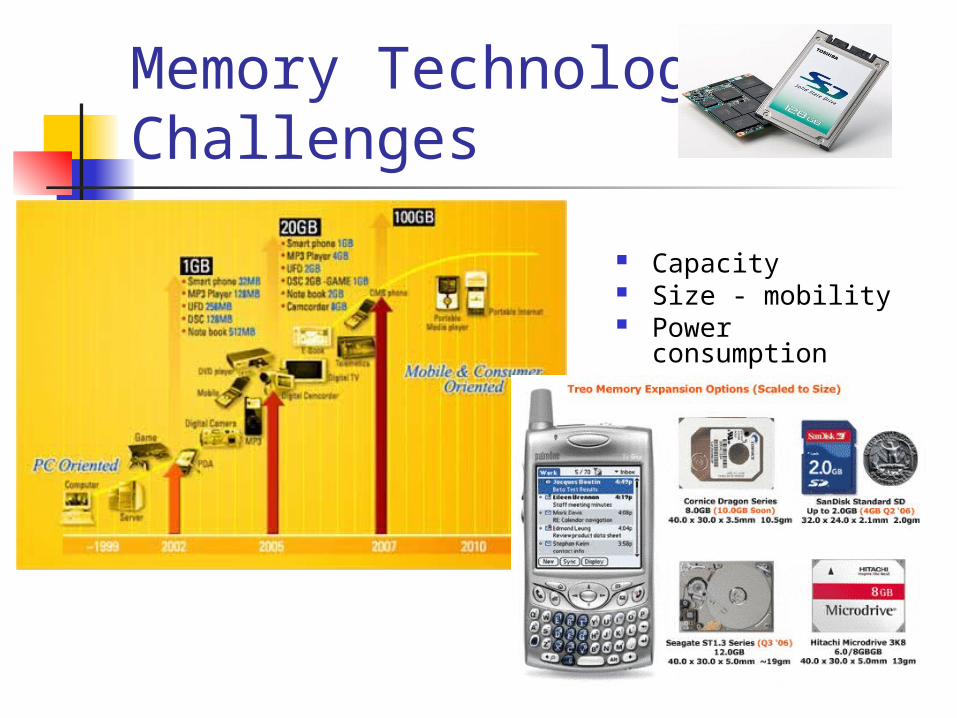
Memory Technology Challenges
Capacity Size - mobility Power
consumption
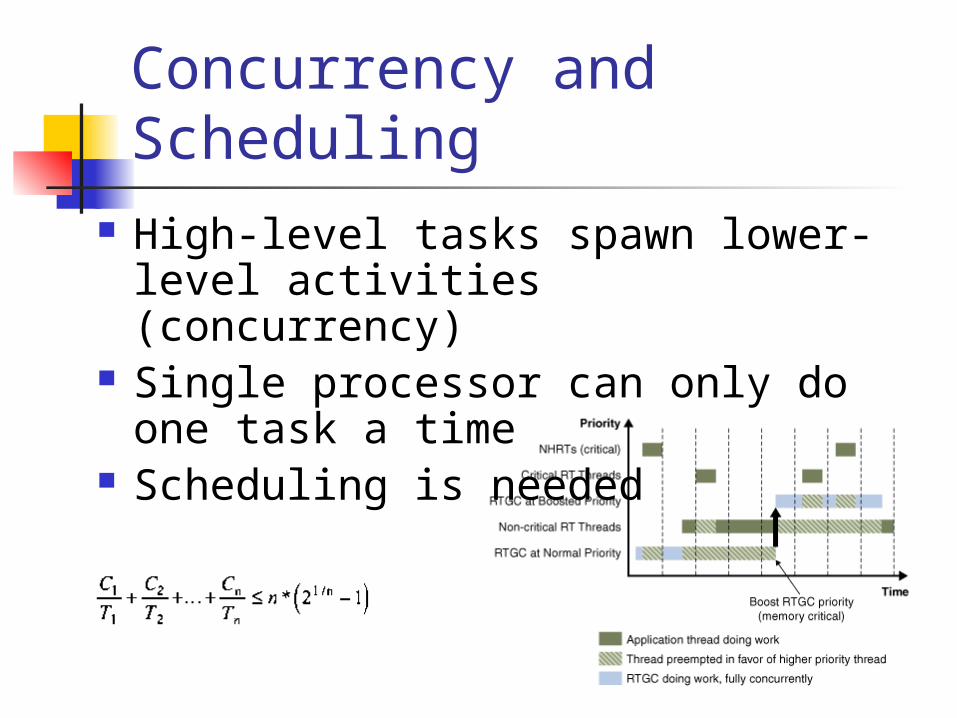
Concurrency and Scheduling
High-level tasks spawn lower-level activities (concurrency)
Single processor can only do one task a time
Scheduling is needed
Major Aspects in Development of Embedded Applications Digital hardware and software
architecture Formal design, development, and
optimization process Safety and reliability Digital hardware and software/firmware
design Interface to physical world analog and
digital signals Debug, troubleshooting, and test of the
design
Modeling
A model is an integrated set of abstractions and their internal relations
Can be expressed in modeling languages Syntax Semantics
Time, Performance, and Quality of Service
In 2002, the Object Management Group (OMG) adopted the Unified Modeling Language™ (UML) profile that provided a standardized means for specifying timeliness, performance, and schedulability aspects of systems and parts of systems, the so-called Real-Time Profile (RTP)
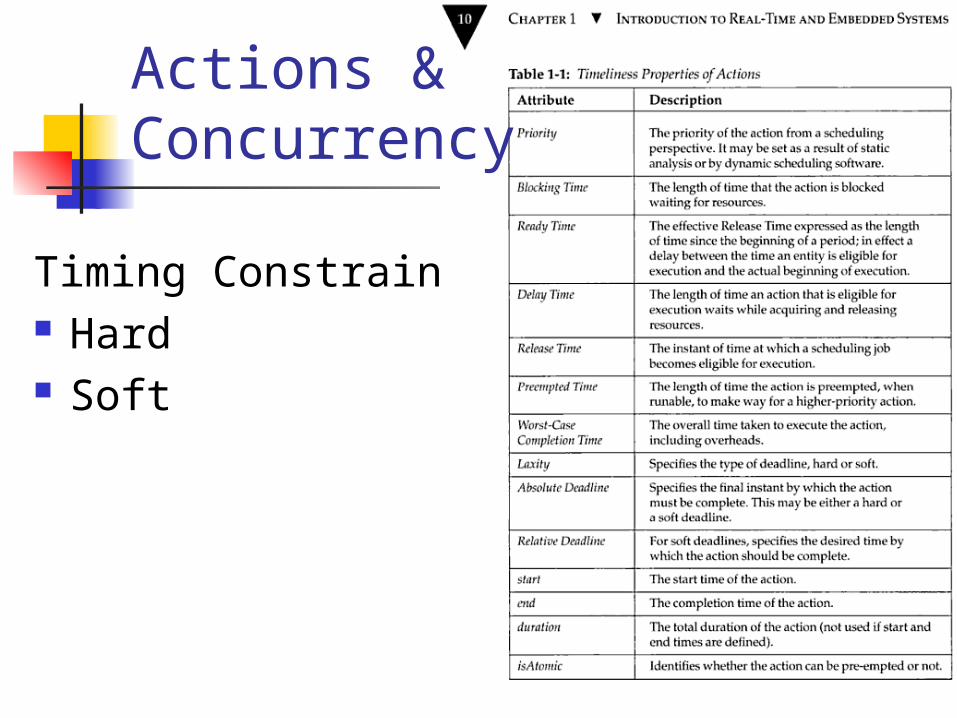
Timing Constraints Hard Soft
Actions &Concurrency
Actions – initiated by events
Message (event) Arrival Pattern Periodic Aperiodic (episodic)
Bounded Burst irregular Stochastic
Concurrency
Concurrency - actions executed at the same time
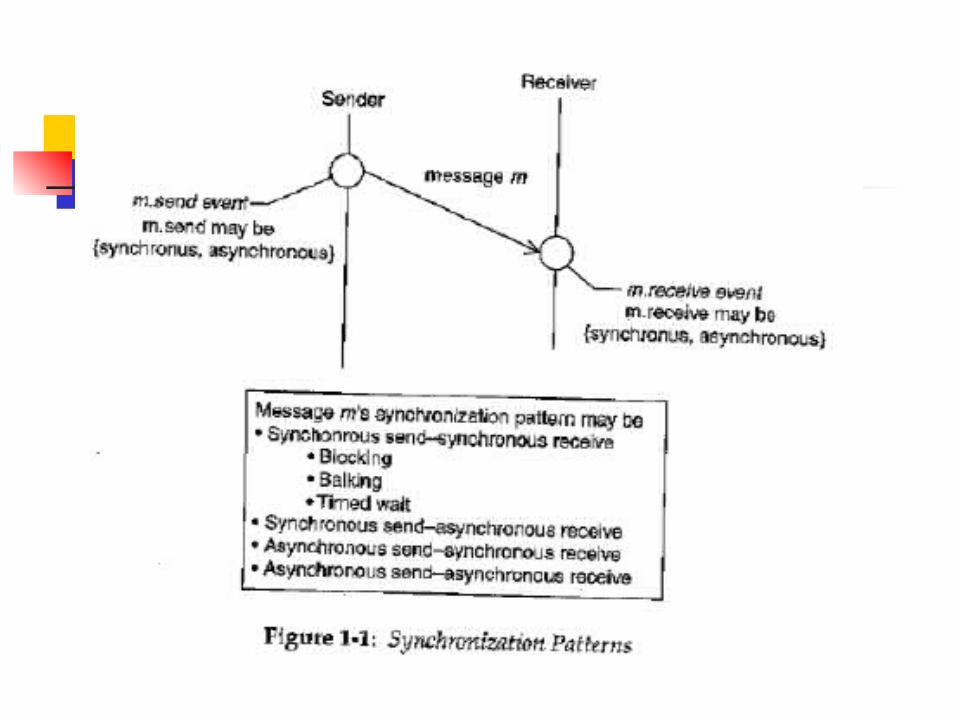
Synchronization patterns describe how different concurrent actions rendezvous and exchange messages
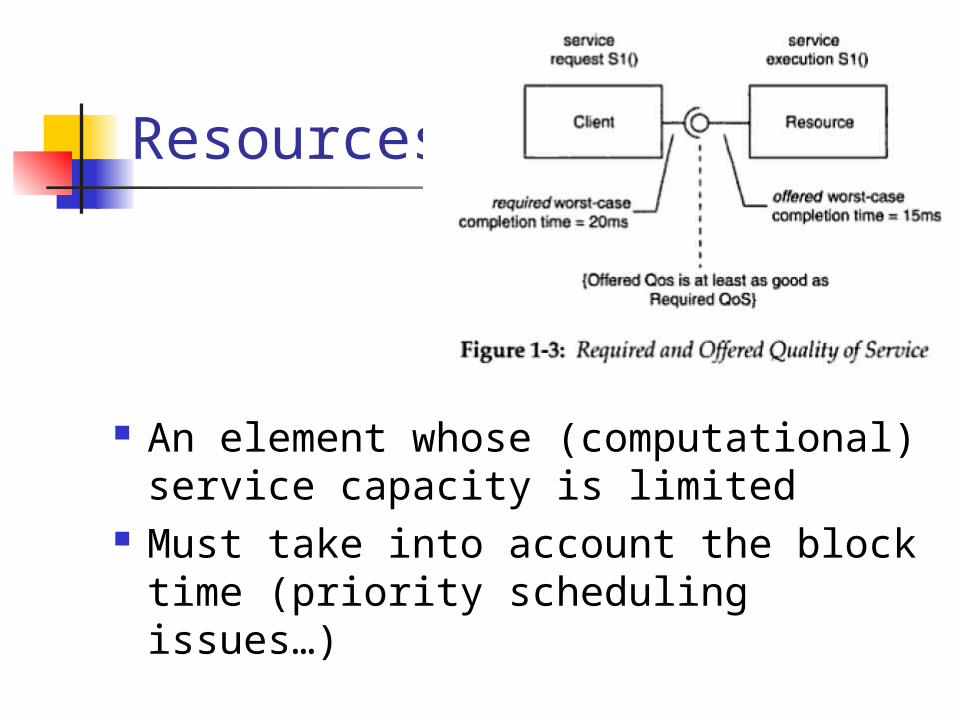
Resources
An element whose (computational) service capacity is limited
Must take into account the block time (priority scheduling issues…)
Time
An ordered series of time instants Duration, or Time intervals
Measuring time: Clocks
With a starting origin May have offset, skew, drift
Timers – generate timeout events, then be reset
Time (cont’)
Clock interrupt: periodic, representing fundamental timing frequencies
Timeout event: result of achieving a specified time from the start of the timer
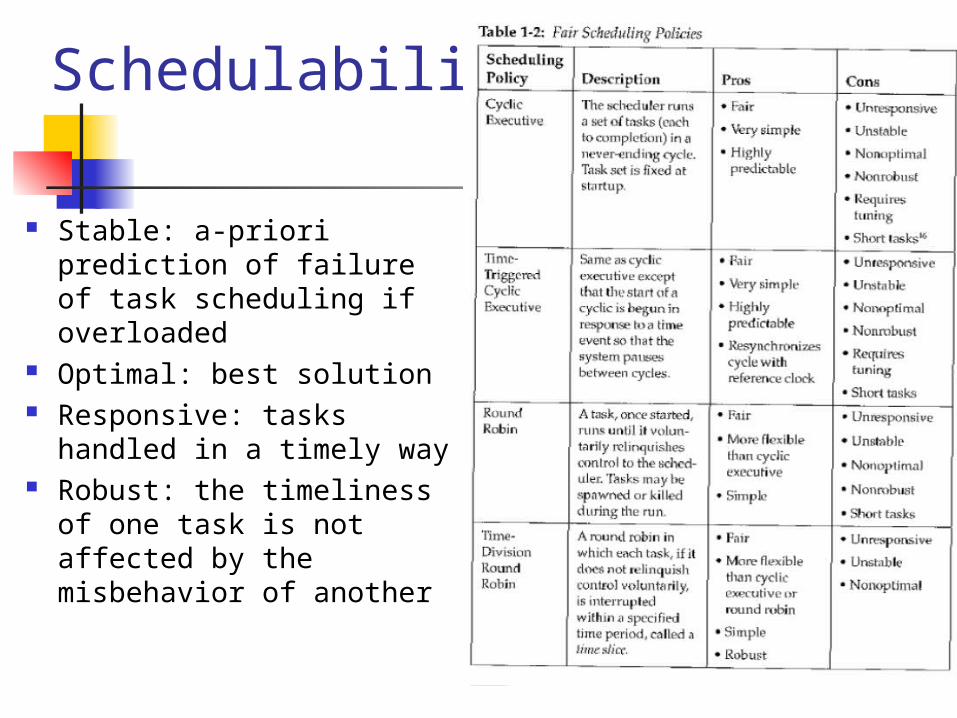
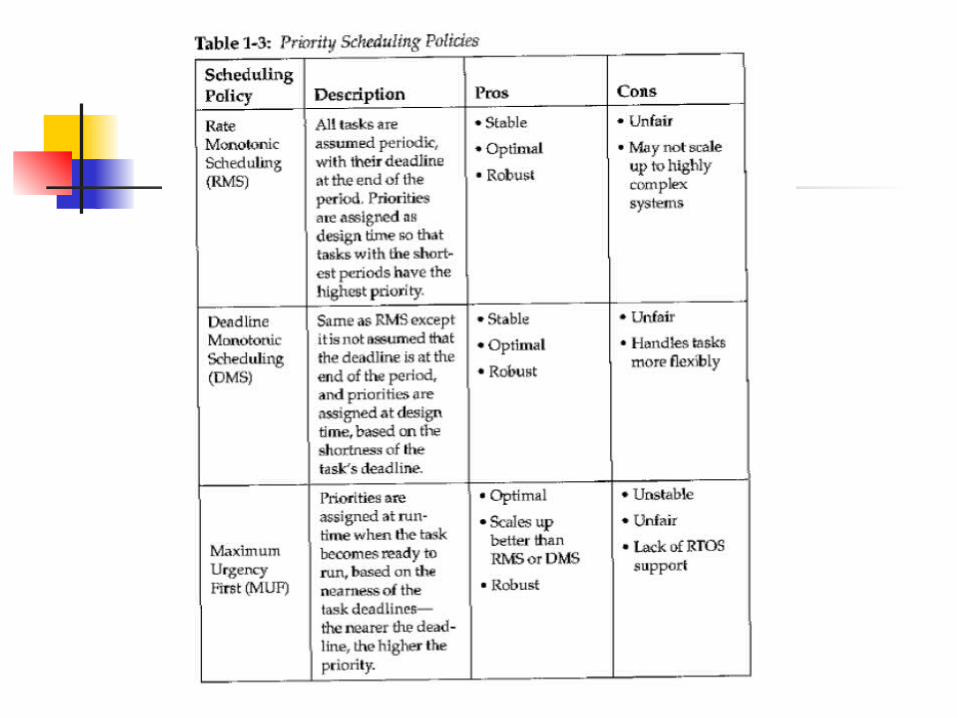
Schedulability
Stable: a-priori prediction of failure of task scheduling if overloaded
Optimal: best solution Responsive: tasks
handled in a timely way Robust: the timeliness of
one task is not affected by the misbehavior of another
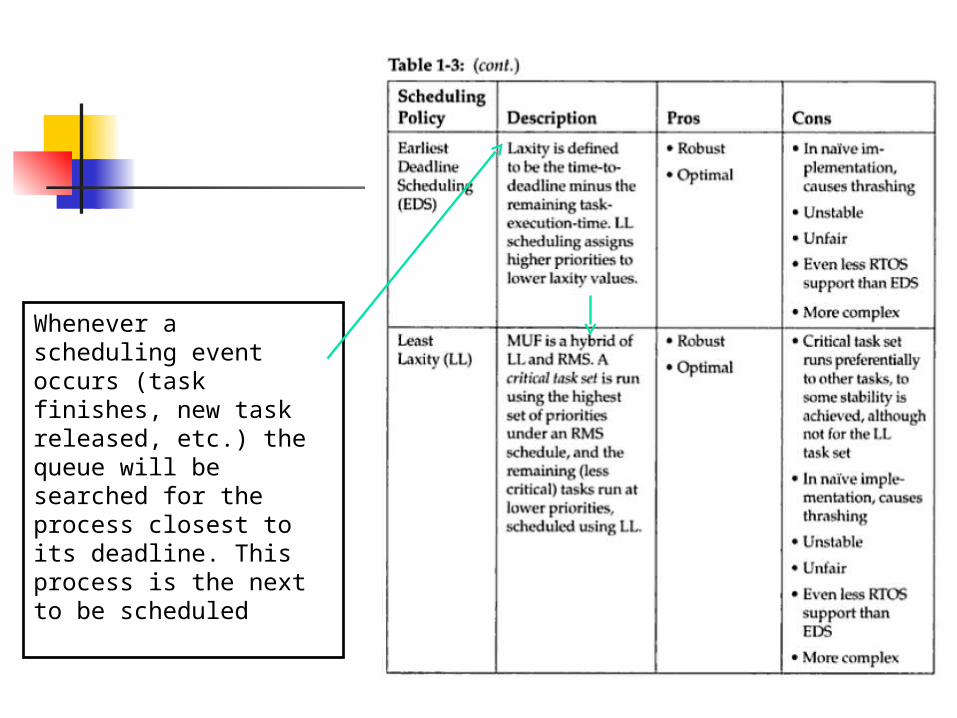
Whenever a scheduling event occurs (task finishes, new task released, etc.) the queue will be searched for the process closest to its deadline. This process is the next to be scheduled
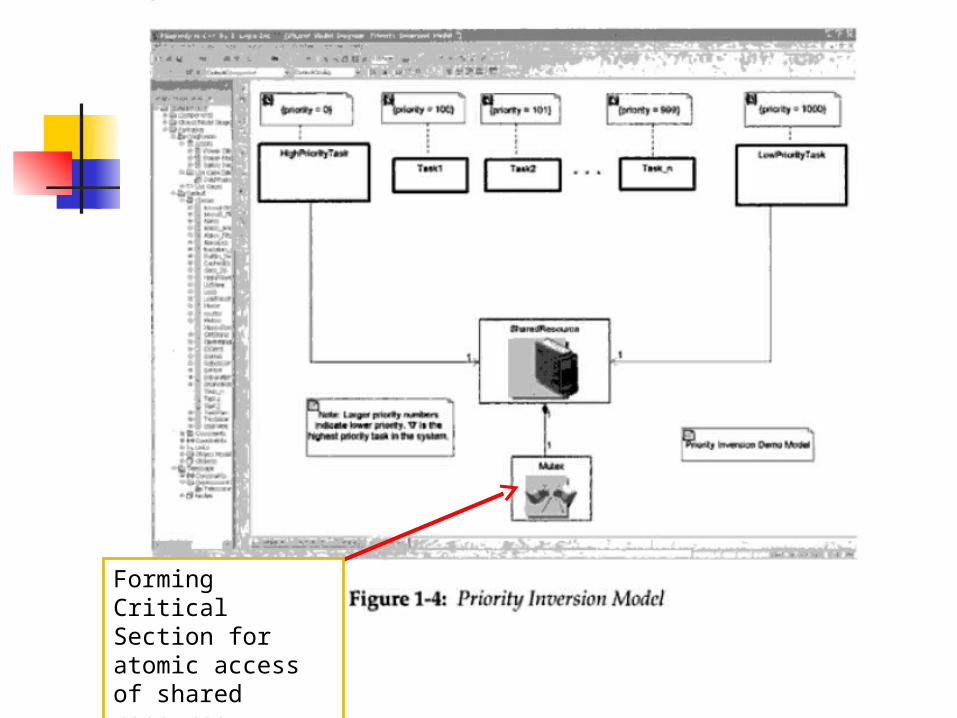
Forming Critical Section for atomic access of shared resource
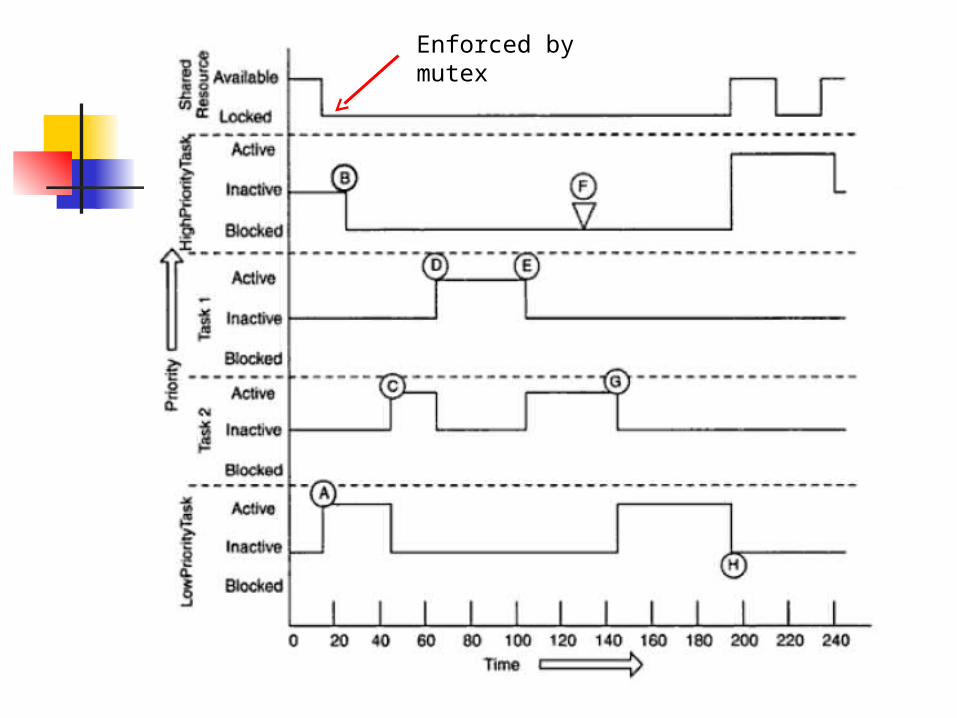
Enforced by mutex
Performance
Workload Computation, Communication Context switch
Access time Response time Throughput
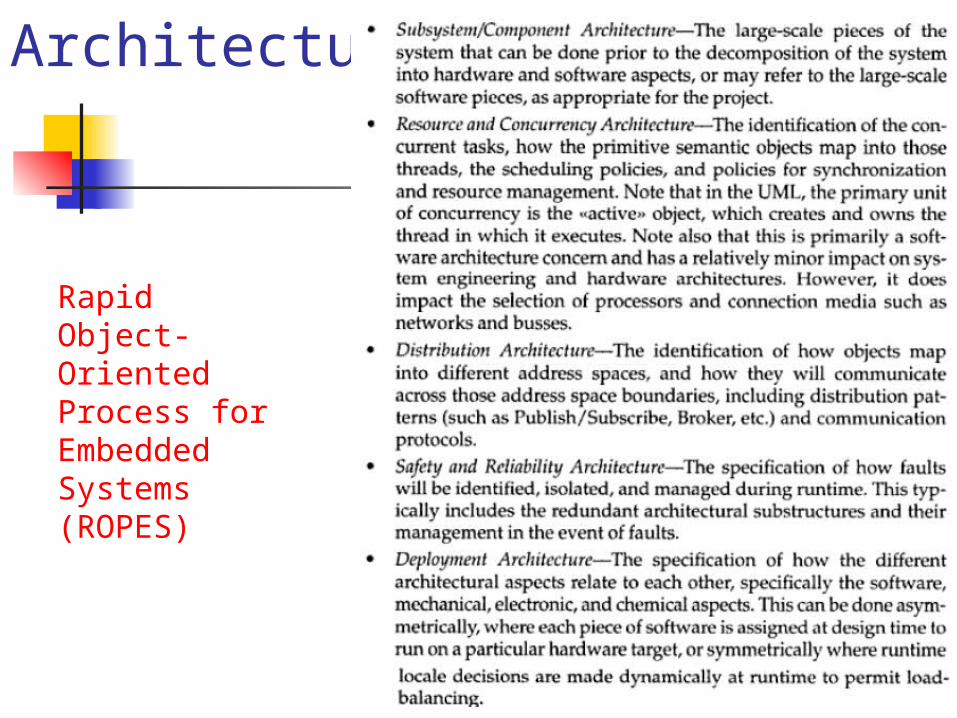
Architectures
Rapid Object-Oriented Process for Embedded Systems (ROPES)
Systems Engineering vs. Software Engineering The primary activities encompassed by
systems engineering include Capturing, specifying and validating the
requirements of the system as a whole Specification of the high-level subsystem
architecture Definition of the subsystem interfaces and
functionality Mapping the system requirements onto the
various subsystems Decomposing the subsystems into the various
disciplines—electronic, mechanical, software, and chemical—and defining the abstract interfaces between those aspects
The Rapid Object-Oriented Process for Embedded Systems (ROPES) Process
The ROPES process exists on three time scales simultaneously: Macro— The entire length of the project,
typically one to several years Micro— The time required to produce a single
increment or version of the system that achieves some targeted functionality—typically four to six weeks
Nano— The time needed to produce, compile, execute, and/or test some very small portion of the system—typically 30 minutes to an hour
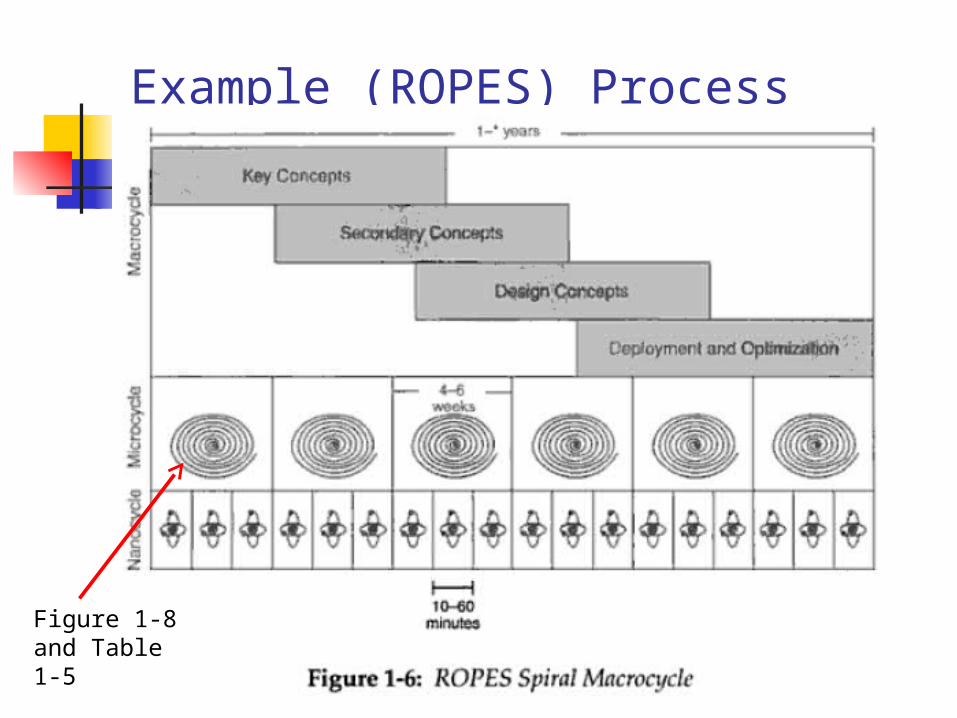
Example (ROPES) Process
Figure 1-8 and Table 1-5
Model-Driven Development (MDD)
Iterative Development— Iterative development is based on the concept of incremental construction.
Use of Models— Large, complex systems can't be effectively constructed using only source-code-level constructs.
Model-Code Bidirectional Associativity— For model-based systems, it is absolutely crucial that the code and the diagrams are different views of the very same underlying model.
Executable Models— You can only test things that execute—therefore, build primarily executable things, both early and often.
Debug and Test at the Design Level of Abstraction— Because today's applications are extremely complex, we use abstract design models to help us understand and create them.
Test What You Fly and Fly What You Test— Simulation has its place, but the purpose of building and testing executable models is to quickly develop defect-free applications that meet all of their functional and performance requirements.
MDA and Platform-Independent Models
A model may support any number of different views. A UML class diagram may show a number of classes interacting together to realize a use case.
Another class diagram may show the same class in a generalization taxonomy. Still another class diagram may show how the class fits within its domain of interest.
MDA and Platform-Independent Models
An executable model is a model that is defined with a rich enough set of semantics that its execution behavior is predictable. One can argue that any model that can be represented ultimately as executable machine code is, in fact, an executable model.
MDA is an approach that separates aspects of a model that are independent of underlying technologies from those that are dependent upon those aspects.
MDA and Platform-Independent Models
The platform-independent model (PIM) is constructed to be independent of the processor(s) on which it runs, the communication infrastructure (such as Ethernet and TCP/IP), middleware (such as COM or CORBA), and even the implementation language (such as C or Ada).
Scheduling Model-Based Projects Why Schedule?
When will the project be done? How much will it cost? Is this project likely to provide a good return on
investment (ROI)? Should I invest in this project or another project? How many resources must I apply to it? Do I need to hire people and if so, with what
skills? When should I begin ancillary activities, such as
gearing up manufacturing, starting the marketing campaign, beginning the next project?
Scheduling Model-Based Projects
Estimation BERT: Bruce’s Evaluation and Review Techniques
ERNIE: Effect Review for Nanocycle Iteration Estimation
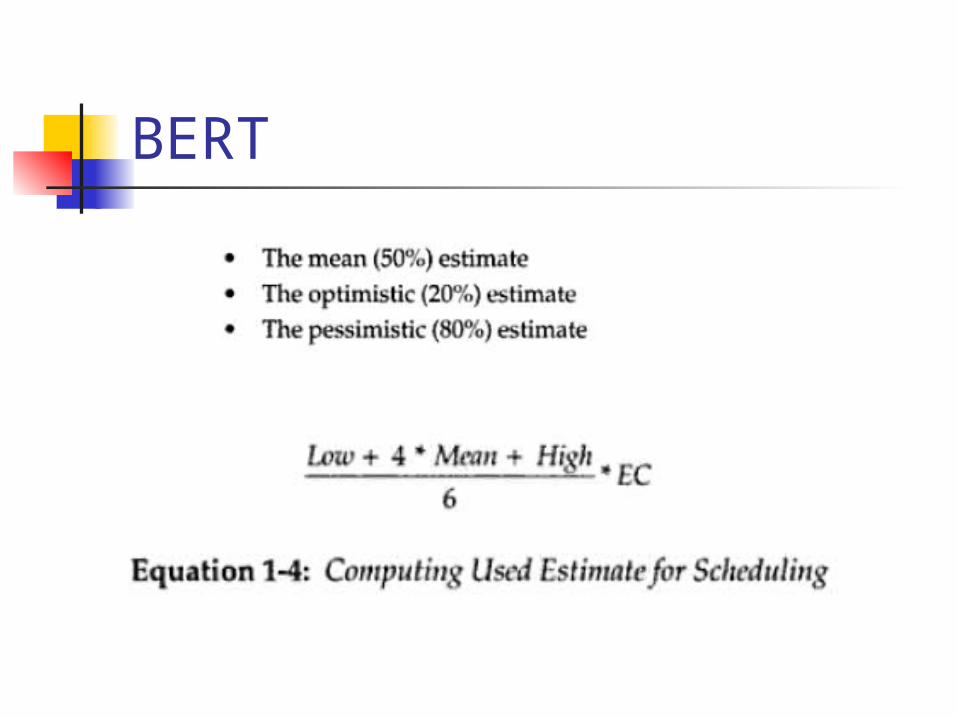
BERT
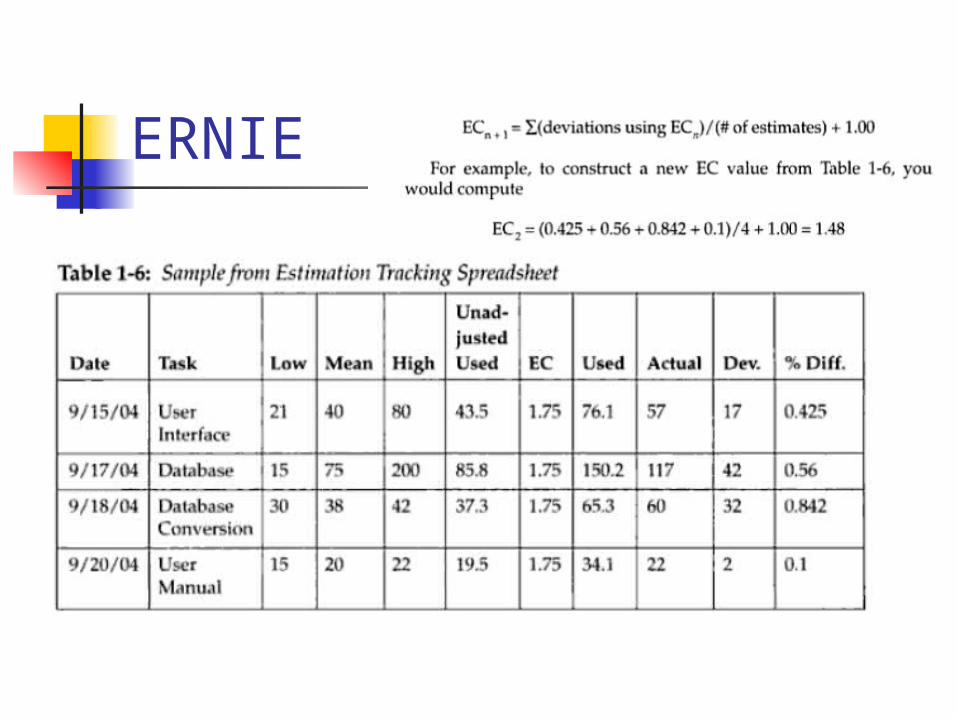
ERNIE
Working with Model-Based Projects
Company's (or project's) software development plan (SDP).
One of the key activities in the daily workings of a project is configuration management (CM).
In a model-based project, the primary artifact being configured with the CM system is the model.
UML supports the modeling needs.
Embedded Software Design
Architecture Analysis Hardware Fundamentals Processor Instructions Getting Started Interrupts
Detailed Design Software Architectures Peripherals Real-time OS
Related Documents











