MODELING,ANALYSIS , AND S YNTHESIS OF S ERPENTINE L OCOMOTION WITH A MULTILINK ROBOTIC S NAKE M. SAITO, M. FUKAYA, AND T. I WASAKI Introduction Most currently available mobile robot mechanisms for ground operations have wheels driven by some type of rotational motion generators such as an engine. Such wheeled mechanisms are relatively efficient, easy to steer, and suited for high-speed driving on a smooth surface. They are, however, not effective in rugged environments such as rough and/or muddy terrains. Mobile robots with legs are being actively researched (e.g. [1]–[4]) for several reasons, including the fact that legs provide higher terrain adaptabil- ity than wheels. Even higher terrain adaptability may be achieved by multilink articulated robots that “crawl” like snakes. Beyond their adaptability to the environment, serpentine robots offer a variety of advantages over mobile robots with wheels or legs. They are robust to mechanical failure because they are modular and highly redundant. They may also perform as manipulator arms when part of the multilinked body is fixed to a platform. On the other hand, one of the main drawbacks is their poor power efficiency for surface locomotion. Another is the difficulty in analyzing and synthesizing snakelike locomotion mechanisms, which are not as simple as wheeled mechanisms. While the former is a fundamental drawback inherent with the snakelike locomotion, the latter point has been addressed by many researchers [5]–[15], and we hope to add another contribution to overcoming the difficulty. Research in experimental biology (e.g., [16], [17]) has revealed the mechanisms of the four common modes (or gaits) of locomotion in snakes: serpentine, side-winding, concertina, and rectilinear. Fur- ther analysis of snake locomotion was also done from biological standpoints [18]–[21] as well as from mechanical perspectives [22], [23]. A successful robotic realization of serpentine locomotion was first reported in [24], and the research results are summarized in [25]. Hirose [25], [26] studied snakes and found that their bodies take on the so-called serpenoid curve when they locomote with a serpentine gait. Moreover, the key property of snakes in achieving serpen- tine locomotion is the difference in the friction coefficients for the tangential and the normal directions with respect to the body. In particular, the normal friction tends to be much larger than the tangential friction, leading to avoidance of side slipping. Based on this fact, Hirose built snakelike locomotors and developed a control method to make them move to a desired direction at a desired speed. However, the locomotors had wheels to realize the directional friction and the control was open loop in nature, and Automotive Products Division, (C) Hitachi, Ltd., 2520 Takaba Hitachinaka, Ibaraki, Japan. Department of Control Engineering, Tokyo Institute of Technology,2-12-1 Oookayama, Meguro, Tokyo 152, Japan. Department of Mechanical and Aerospace Engineering, University of Virginia, P.O. Box 400746, Charlottesville, VA 22904-4746, e-mail: [email protected]. 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

MODELING, ANALYSIS, AND SYNTHESIS OF SERPENTINE LOCOMOTION
WITH A MULTILINK ROBOTIC SNAKE
M. SAITO�, M. FUKAYA
�, AND T. IWASAKI
�Intr oduction
Most currentlyavailablemobile robot mechanismsfor groundoperationshave wheelsdrivenby sometypeof rotationalmotiongeneratorssuchasanengine.Suchwheeledmechanismsarerelativelyefficient,easyto steer, andsuitedfor high-speeddriving on a smoothsurface.They are,however, not effective inruggedenvironmentssuchasroughand/ormuddyterrains.Mobile robotswith legsarebeingactivelyresearched(e.g.[1]–[4]) for severalreasons,includingthefactthatlegsprovidehigherterrainadaptabil-ity thanwheels. Even higherterrainadaptabilitymay be achieved by multilink articulatedrobotsthat“crawl” likesnakes.
Beyond their adaptabilityto the environment,serpentinerobotsoffer a variety of advantagesovermobilerobotswith wheelsor legs. They arerobustto mechanicalfailurebecausethey aremodularandhighly redundant.They mayalsoperformasmanipulatorarmswhenpartof themultilinkedbodyis fixedto a platform. On theotherhand,oneof themaindrawbacksis their poorpower efficiency for surfacelocomotion.Anotheris thedifficulty in analyzingandsynthesizingsnakelike locomotionmechanisms,which arenot assimpleaswheeledmechanisms.While theformeris a fundamentaldrawbackinherentwith thesnakelike locomotion,thelatterpointhasbeenaddressedby many researchers[5]–[15], andwehopeto addanothercontribution to overcomingthedifficulty.
Researchin experimentalbiology (e.g.,[16], [17]) hasrevealedthemechanismsof thefour commonmodes(or gaits)of locomotionin snakes: serpentine,side-winding,concertina,andrectilinear. Fur-theranalysisof snake locomotionwasalsodonefrom biologicalstandpoints[18]–[21] aswell asfrommechanicalperspectives[22], [23]. A successfulrobotic realizationof serpentinelocomotionwasfirstreportedin [24], andtheresearchresultsaresummarizedin [25].
Hirose [25], [26] studiedsnakesandfound that their bodiestake on the so-calledserpenoidcurvewhenthey locomotewith a serpentinegait. Moreover, thekey propertyof snakesin achieving serpen-tine locomotionis thedifferencein thefriction coefficientsfor thetangentialandthenormaldirectionswith respectto the body. In particular, the normalfriction tendsto be muchlarger thanthe tangentialfriction, leadingto avoidanceof sideslipping.Basedon this fact,Hirosebuilt snakelike locomotorsanddevelopeda controlmethodto make themmove to a desireddirectionat a desiredspeed.However, thelocomotorshadwheelsto realizethe directionalfriction andthe control wasopenloop in nature,and�
AutomotiveProductsDivision,(C) Hitachi,Ltd., 2520TakabaHitachinaka,Ibaraki,Japan.�Departmentof ControlEngineering,Tokyo Instituteof Technology, 2-12-1Oookayama,Meguro,Tokyo 152,Japan.�Departmentof MechanicalandAerospaceEngineering,University of Virginia, P.O. Box 400746,Charlottesville,VA
22904-4746,e-mail:[email protected].
1

henceadaptabilityto theenvironmentwassomewhatweakened.Nevertheless,thecontrolschemewasvery intuitiveandconstitutedasolid foundationin thestudyof roboticserpentinelocomotion.
Anothernotableresulton the snakelike robotic mechanismhasbeenobtainedby Burdick andcol-leagues[27]–[29]. They studied,with mathematicalrigor andexperimentalvalidation,themechanismof “undulatory locomotion” in which net motion is generatedby the couplingbetweeninternalshapechangesandexternalnonholonomicconstraints.The problemconsideredis kinematicratherthandy-namicin naturedueto thenonholonomicconstraintsarisingfrom idealizationof wheelssuchthat theydo not slip in the directionof rotationalaxis. Otherresultson serpentinelocomotionin the nonholo-nomic settingincludethosedescribedin [30]–[32]. Again, an essentialassumptionin theseresultsisthatserpentinerobotshave wheels,andthusthemainadvantageof serpentinelocomotion,adaptabilityto theenvironment,cannotbefully realized.
In this article,we considera snake robot without wheelsthathassubstantialpotentialfor adaptingto the environmentat the expenseof power efficiency. Our objective is to establisha mathematicalframework for modeling,analysis,andsynthesisof serpentinelocomotionwith amultilink roboticsnake.Wedoapplysomeexistingknowledgefrom biologicalstudyof snakes,but our focuswill beonaroboticrealizationtheoryof snakelike locomotionratherthanthebiomimeticaspectof theproblem.Werestrictour attentionto planarserpentinegait of locomotion,and hencethe more generalthree-dimensionalmotionandothergaitson isotropicfriction environmentareoutof thescopeof this article.
First,wedevelopamathematicalmodelfor anarticulatedsnakerobotconsistingof � rigid links withtorqueactuatorsat ��� joints. Two modelsfor the directionalfriction force actingon eachlink aredevelopedandintegratedinto thetotal equationsof motionfor thesnake robot. We thenshow a modeltransformationthatdecouplesthedynamicsinto theinternalshapemotion(joint torques� joint angles)andtheinertial locomotion(joint angles� inertialpositionandorientation).Thisdecouplingenablesusto concentrateon controlof the inertial locomotionthroughtheshapechange,assumingthat theshapecanreadilybecontrolledasdesiredvia thejoint actuators.
We thenanalyzethe locomotionof the snake robot with serpentinegait from the power efficiencystandpoint.In particular, we investigatetheshapemotion thatachievesthe locomotionat a prescribedspeedwhile requiringthe leastinput power. Basedon theanalysisresults,we determinethe feedbackcontrolarchitectureto realizedesiredlocomotionandproposea methodfor designingsuchcontrollersby suggestinga quasi-linearizinginput transformation.Finally, our control strategy is experimentallyvalidatedby afive-link articulatedsnakerobot.To ourknowledge,this is thefirst researchthataddressesthe problemof modeling,analysis,andfeedbacksynthesisof serpentinelocomotionby an articulatedroboticsnakewithoutwheels.
We usethefollowing notation.Thesetsof � -dimensionalrealvectorsand � ��� realmatricesaredenotedby � ��� and � ������� , respectively. For a matrix � , the transposeis denotedby ��� . For scalars�����! " ! "�#� � , diag$ �����! ! " "�#� � % denotesthe �&�'� diagonalmatrix with ���(�! ! ! )�#� � on the diagonal. Forvectors� and * , �,+ denotesthevectorwith the - th entry �,+. , while �0/ * denotesthevectorwith the - thentry � . / * . . Thederivativeof asignal� $21 % with respectto thetime 1 is denotedby 3� $41 % ( i.e., 3�6587:9;�0/<9 1 ).For a scalar-valuedperiodicsignal � $41 % , ave$ � % is theaveragevalueof � $41 % over a period. Thesignumfunctionis denotedby sgn$>= % , i.e.,sgn$ � % is if �@?BA , A if �C7�A , and �D if �6EFA . For agenericfunctionG $ � % 5 � �H� � � suchassgn, IKJML , and N"O;I , we may let it admit a vector-valuedargumentwith a slightabuseof notation,in which casethe function operateon eachentry of the argumentvector. A similarcommentappliesto functionswith two arguments,e.g.,sat$P= � = % anddzs$P= � = % definedin theAppendix.
2

Modeling of a Snake Robot
Considerthe snake robot depictedin Fig. 1, whichconsistsof � links connectedthrough �Q� joints.Eachlink is rigid with uniformly distributedmass.Eachjoint is equippedwith a torqueactuator(mo-tor). Thesnake robot is placedon a horizontalsur-face,and we consideronly planarmotion; in thiscase,the mechanicalsystemhas �SRUT degreesoffreedom( �6�V for shape,T for position,and fororientation).
WXWY ZZ Z[ [
[\ \ \ \ \^] ]] ] ] _
_ _ _a` ` ` ` ` `
b � b +x
x
x
x
$ ����� * � %$� + � * + % $ �,cd� * c %
e f�*Tdg chhh hhhi_ _ _ _Kj
Figure1. Snake robot.
Later, wewill developdynamicequationsof motionfor thesnakerobot.To thisend,let usintroducesomenotation.Fix � - * axesin the inertial frameandconsiderthe - th link of thesnake robot. Thelinkis of mass� . , length Tkg . , andmomentof inertia l . $ 7 � . g +. /�m % . Let $ � . � * . % and
b . bethecoordinatesofthecenterof gravity andtheanglebetweenthe link andthe � -axis,respectively. Denoteby � , * , and
bthe � -dimensionalvectorswhose- th entriesare � . , * . , and
b . , respectively. Definen 587 oppq . . . . . .
rtssuSv � �xwy��z �|{ ��� � }~5�7 oppq ��. . . . . . ��
rtssuQv � ��w8��z �|{ ���� 587���� AA ��� � � 587�� =d=d=�^� � v � � � � � 587 ��.�� � � .��� 587 diag$�I#J�L b ���! ! ! )� I#J�L b � % �~� � 5�7 diag$2N"O;I b ���" ! ! "� N"O;I b � %l 587 diag$Pl �(�! ! ! )� l � % � � 587 diag$2� ���! ! " "� � � % ���&5�7 diag$�g �(�! ! ! )� g � %� 587:� n � $ } � z � } � % z � n ���~��5�7 � z � } � $ } � z � } � % z � n �� 5�7 laR ��� � ��� R � � � � � �H� 587 ��� � � � � � � � ��� � �¡587 � ��� � ��� � � � � � �¢ 587:} � z � } � ��£¤587 � z � } � ¢ z � ��¥a5�7 / $ � � � � % � �"¦ 5�7�¥ �In theabove, thesymbols} and
nstandfor the“dif ference”andthe“addition” operators,respectively.
The vector � is a basisof the kernelof } . It canbe shown that the matrices�
and � dependon therelativeangles§ 587¡} b only, andthusaredeterminedby theshapeof thesnake robot.
Considerthefree-bodydiagramfor the - th link depictedin Fig. 2, whereG . and ¨ . aretheforceand
thetorquedueto thefriction betweenthe link andthehorizontalsurface, © . and © . z � aretheconstraintforcesfrom theadjacentlinks, and ª . and ª . z � arethejoint torquesfrom theactuators.Let ¨ v � ��� bethevectorwhose- th entryis ¨ . , andsimilarly for
Gk« � Gk¬ v � � � and © « � © ¬ � ª v � � ��z � , where $ Gd«� � Gk¬P % arethe( �®� * ) componentsof thefriction forcevector
G . . Finally, we definethe total friction forcevectorG
andthewholepositionvector ¯ byG 587 � Gk«Gk¬ � � ¯ 587 � � * � 3

We shall first develop two friction modelsbasedon a simplified viscousfriction and a Coulombfriction to giveexpressionsfor
Gand ¨ in termsof � , * and
b. Equationsof motionwill thenbederived
usingthefriction models.
°²±³²´µ e°~±³~´h hK¶ hh ·°~±³²´e µ WY x¸ ¸ ¸ ¸ ¸ ¸ ¸ ¸ ¸ ¸ ¸ ¸¸ ¸^¹¹¸¸¸¸¸¸¸¸¸¸¸¸¸¸¹¹ b .
$ � . � * . % ] ] ] ] ] º fe» µ
ª .© ¬P © «�G .
© «��¼�½ © ¬P¾¼<½ª . z � ¨ .
Figure2. Freebodydiagramfor the - th link.
*�
� 1¿ 9À¿Á . 3Á .
g .$ � . � * . %
Figure3. Infinitesimalsegmenton the - th link.
Simple Friction Model
Considerthe - th link of thesnake robotdepictedin Fig. 3. Thecoordinatesof theinfinitesimalsegment9À¿ aregivenbyÁ . 7 � � .* . � R � N"O<I b .I#J�L b . � ¿Â Takingthederivativewith respectto thetime,wehave thevelocityvectorin the � - * frame:3Á . 7 � 3� .3* . � R � �6IKJML b .N)O;I b . � ¿ 3b . Thetangentialandnormalcomponentsof thevelocityvector 3Á . aregivenby�ÄÃÅ�Æ ÃÅ � � 5�7 � N"O<I b . I#J�L b .�6I#J�L b . N)O;I b . � 3Á . 7 � ÅkÆ Å � � R � A¿ 3b . � (1)
where� Å�Æ Å � � 5�7 � N"O<I b . I#J�L b .�6I#J�L b . N)O;I b . � � 3� .3* . � (2)
Now assumethatthefriction forceis modeledin thebody( 1 - � ) frameas� 9 G Æ 9 G � � 7 � �ÈÇ Æ AA Ç � � � ÃÅkÆ ÃÅ � � 9 � .where Ç Æ and Ç � are the friction coefficients and 9 � . is the massof the infinitesimal segment(i.e.,9 � . 7 $�� . 9À¿ % / $ÉTdg . % ). Transformingthecoordinates,thefriction forcein theinertial frameis� 9 Gd«�9 Gk¬P � 7 � N"O;I b . �6I#J�L b .IKJML b . N)O;I b . � � 9 G Æ 9 G � �
4

Integratingover thelink, thetotal friction forceis givenby� Gd«�Gk¬P � 7 �Ê� . � N"O<I b . �6IKJML b .I#J�L b . N"O;I b . � � Ç Æ AA Ç � � � N"O<I b . I#J�L b .�6I#J�L b . N)O;I b . � � 3� .3* . � Finally, thetotal friction torquearoundthecenterof massof thelink is¨ . 7VËB¿�9 G � 7 � � . g +.m Ç � 3b . 7 � Ç � l . 3b .wherethepositivedirectionis counterclockwise.
We now considerthewholesystemof connectedlinks. It canbeverifiedthatthetotal friction forceandtorqueactingon thesystemcanbeexpressedasG 7 �ÊÌ � }ÎÍ ÌÏ�� 3¯¨ 7 � }ÑÐ 3b (3)
where}ÎÍD5�7 � �ÏÆ � AA � � � � � }ÑÐ�587:� � l � Ì � 587 � � � � ������ � � � � (4)�ÏÆÒ587 diag$ Ç Æ ½ �! ! ! )� Ç Æ�Ó % � � � 587 diag$ Ç � ½ �" ! ! "� Ç � Ó % Coulomb Friction Model
As in the previous section,we give the expressionfor the tangentialandnormalvelocity components(1). Assumethatthefriction forceactingon theinfinitesimalsegmentis givenby� 9 G Æ 9 G � � 7 ��© ��Ô Æ AA Ô � � � sgn$ ÃÅkÆ %
sgn$ ÃÅ � % � 9 � .where Ô Æ and Ô � are,respectively, the Coulombfriction coefficientsin the tangentialandthe normaldirections,© is thegravity constant,and 9 � . is themassof thesegment. Integratingover the link, thetotal friction forceactingon the - th link is asfollows:� G Æ G � � 7 �È© ��Ô Æ AA Ô � � ËÑÕ z Õ � .Tdg . � sgn$ ÃÅ�Æ %
sgn$ ÃÅ � % � 9À¿; Similarly, thetotal torqueis givenby¨ . 7VËB¿d9 G � 7 � Ô � � . ©Tkg . Ë Õ z Õ sgn$ ÃÅ � % ¿d9À¿; UsingLemma1 in theAppendix,wehave� Gd«�Gk¬P � 7 �Ê� . © � N"O<I b . �6IKJML b .I#J�L b . N"O;I b . � ��Ô Æ AA Ô � � sat Ö � ÅkÆ Å � � ��� Ag . 3b . �;ר . 7 � T Ô � � . ©Âg . dzs$ Å � � g . 3b . %
5

Assemblingtheaboveexpressionsinto vectorforms,thetotal friction forceandtorquecanbegivenbyG 7 �ÊÌ ��Ø Í sat$|ÌÏ�� 3¯ �ÚÙ 3b %¨ 7 � Ø Ð dzs$|Û � 3¯ �(� 3b % (5)
whereØ ÍD5�7 �ÈÜ Æ ��© AA Ü � ��© � � ÙÝ5�7 � A� � � Ø Ð�7 T Ü � ��© ��� Û � 5�7 � � ��� � � �Ü Æ 587 diag$ Ô Æ ½ �" ! ! "� Ô Æ�Ó % � Ü � 587 diag$ Ô � ½ �" ! ! "� Ô � Ó % Equations of Motion
Applying the first principle to the free-bodydiagramof the - th link in Fig. 2 andassemblinginto the� -link snake robot,weobtaintheequationsof translationalmotion�~Þ�ß7 Gk« R } � © «�²Þ* 7 Gk¬ R } �8© ¬ (6)
andtheequationof rotationalmotionl Þb 7 ¨Î� ��� � n � © « R � � � n � © ¬ R } � ª (7)
Recallthatthesnakerobothas�ÎRàT degreesof freedom,andwehaveusedm � variables( � , * , andb) to
describeits motion. Below, we will developequationsof motion in termsof theabsoluteanglesb
andthepositionof thethecenterof gravityá587 � á «á ¬ � 7 � �È� � � �� � �¡* �
In view of Fig. 1, thevectors� , * , andb
areconstrainedby}a� R n � N"O<I b 7¡A} *âR n � I#J�L b 7�Aã (8)
Fromthedefinitionof á and(8), wehaveä �ß7 � � n � N)O;I bá « � � ä * 7 � � n � I#J�L bá ¬ � � ä 587 � }� �å� / � � Solvingtheseequationsfor � and * , andtakingthetimederivatives,weseethatthetranslationalvelocityis givenby3¯ 7Ý� 3b R � 3á (9)
wherewenotedthatä z � 7 � � z � } �4$ } � z � } � % z � � � 6

Next we decomposethe equationsof translationalmotion (6) into two parts: expressionsfor thecenterof massaccelerationÞá andtheconstraintforces © « and © ¬ . Multiplying (6) with
ä � z � from theleft, wehaveä Þ�ß7 � } Þ�Þá « � 7 � } � z � Gd« R } � z � } �8© «� � Gd« / � � (10)
for the � coordinateandsimilarly for the * coordinate.Solvingfor © « and © ¬ , wehave© « 7 $ } � z � } � % z � $ n � $ � � 3b + R ��� Þb % � } � z � Gd« %© ¬ 7 $ } � z � } � % z � $ n � $ ��� 3b + � � � Þb % � } � z � Gk¬ % (11)
wherewenotedfrom (8) that} Þ�C7 n � $ � � 3b + R ��� Þb % � } Þ* 7 n � $ ��� 3b + � � � Þb % Substituting(11) into (7), andusingthesecondrow of (10),wehave� Þb R � 3b + 7¡} �8ªæR'¨�R � � G�HÞá�7 � � G (12)
Thecompletesetof equationsof motionis now derived: (12), (9), and(3) for thesimplefriction modeland(5) for theCoulombfriction model. In the formercase,all theseequationscanbeassembledintothefollowing:� � AA �ßç � � Þb Þá � R � � 3b +A � R ��è éé �~ê � � 3b 3á � 7 � } �A � ª (13)
where�Êè éé �~ê � 5�7 � }æÐ AA A � R � � �� � � Ì � }ÎÍ Ì � � � � � � (14)
and }ÑÐ and }ÎÍ aredefinedby (4).
Dynamic Decoupling
In this section,we show that thedynamicequationdevelopedin theprevioussectioncanbedecoupledinto two parts:thatis, theshapemotion(joint torques� joint angles)andtheinertial locomotion(jointangles � inertial position andorientation). This decouplingsimplifies the analysisandsynthesisofsnakelike locomotionin thesubsequentsections.
To this end,we first observe somepropertiesof thesnake robotdynamics.It canreadilybeverifiedthatthesystemmatriceshave thefollowing internalstructures:� R � � 7:A3� 7F� 3ë � 3ë �ì (15)
Thesepropertieshave beenfoundfor roboticmanipulatorsandusedfor controldesign(e.g.,[33]), andwill alsobeusefulfor our developmentbelow.
7

Definenew variablesasfollows:� 3§ 3í � 587 � }� � � � 3b Notethat § is thevectorof relativeanglesbetweenadjacentbodiesand 3í canbethoughtof asanaverageangularmomentum.Solvingthis definingequationfor 3b ,3b 7¡£ 3§æR �"¦ 3í (16)
In view of (15),wehave� Þ§ Þí � 7 � } Þb� ��îî Æ $ � 3b % � 7 � } Þb� ��$ � Þb R � 3b + � 3ë � 3b % � 7 � } Þb� ��$ � Þb R � 3b + % �wherewenotedthat� � 3ë � 3b 7 3b � � 3b 7¡Abecause� is skew symmetric. Using theserelationships,the original equationof motion (12) canbetransformedas� } � z �� � � $ � Þb R � 3b + � ¨ï� � � G � } � ª % 7:Aor equivalentlyasÞ§æR } � z � $ � 3b + � ¨ï� � � G % 7 ¢ ªÞí 7 � �2$4¨ÑR � � G % (17)
whereweused� � } � 7:A .We now seethat the torqueinput ª drivestheshape§ of thesnake robot throughthefirst equation
in (17),andthattheshapechange 3§ , whencoupledwith theinertial motion,generatesthefriction forceandtorqueby (3) or (5) with (9) and(16). Thefriction forceandtorquethusgenerateddrive thesnakerobotwith respectto theinertial framethroughthesecondequationin eachof (12)and(17). In thecaseof thesimplefriction model(3), the rationalebehindthis observationmaybemoretransparent,for thedecoupledequationsof motioncanbeconciselyexpressedasfollows:� ¥ AA �ßç � � Þí Þá � R � � �¦ èC�"¦ � �¦ éé � �"¦ ê � � 3í 3á � R � � �¦ èé � � £ 3§ 7:A
Þ§æR } � z � $ � 3b + R è 3b R é 3á % 7 ¢ ª (18)
where 3b is givenby (16).With thedecoupledequationsof motion,it is naturalto developa controlstrategy suchthat:
1. Thejoint torque ª controlstheshape§ of thesnake robot.
2. Theshape§ controlstheinertial behaviorí
and á of thesnake robot.
Sincethe matrix¢
is nonsingular, the control in step1 is easy. In the next section,we examinethedynamicbehavior of thesnake robotrelatedto step2 of theabovecontrolstrategy. Theanalysisresultsfrom thenext sectionwill beusefulfor designingcontrolsystemsto achieve snakelike locomotionin alatersection.
8

Analysis of Snakelike Locomotion
Whenthe shape§ of the snake robot changes,the forceG
and the torque ¨ aregenerateddueto thefriction betweenthe robot and the surfaceon which it lies. As a result, the positionof the centerofgravity á andthe angularmomentumof the whole body 3í change.The first equationin (18) showshow thechangein § affectsthemotionvariables 3í and 3á . If we controltheshape§ appropriately, thenthesnake robotwill achieve thedesiredlocomotion.Our objective in this sectionis to find out how tochange§ to achieve thedesiredlocomotionspecifiedby speed,direction,andpowerefficiency.
Thereareat leasttwo approachesto determiningappropriate§ ; oneis to optimize 3§ with respectto awell-definedcriterionsubjectto thedynamicconstraintgivenby thefirst equationin (18); theotheris tosimply mimic themotionof living snakes. Theformerwould bea very challengingapproach,whereasthe latter doesnot guaranteeyielding a motion that is optimal for the robotic snake. Herewe take anapproachthatfits in betweenthetwo.
Wewill restrictourdiscussionto thebiologicallyinspiredserpentinelocomotion[25] (i.e.,themotioninducedby changingtheshapeof thesnake robotsoasto form theserpenoidcurvesobservedin livingsnakes).Thesetof serpenoidcurvesis characterizedby severalparameters.We will examinehow eachparameteraffects the locomotionof our snake robot using the equationof motion developedearlier.Below, wepresentouranalysisresultsfor thecaseof thesimplefriction modelonly. Wealsoperformedthe sameanalysisusing the Coulombfriction model (5), and found that the generaltendency of theresultsis the sameasthe simplefriction case.The analysisresultswill be useful for determiningtheappropriateshapechange 3§ to achieve locomotionin thedesireddirection,at thedesiredspeed,with theoptimalpowerefficiency.
Serpenoid Curve
Let usfirst briefly review theserpenoidcurve. It is defined[25] asfollows:
Definition 1 Considera curve on the � - * planethatpassesthroughtheorigin. It is calleda serpenoidcurveif anarbitrarypoint ( �®� * ) on thecurvecanbeexpressedas� $ ¿ % 7¡Ë^ðñ N)O;Ik$4ò!ó % 9Âô�� *�$ ¿ % 7VËaðñ I#JMLõ$2ò!ó % 9�ô0� ò!ó 5�7�ö N"O<Ik$|÷ ô % R Ç ôfor somescalarsö , ÷ , and Ç , where ¿ is thearclengthfrom theorigin to thepoint.
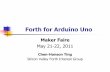
Figure4 shows severalserpenoidcurvesof unit lengthgeneratedby differentchoicesof theparam-etersö , ÷ , and Ç . We seethateachcurve hasa sinusoidlikeperiodicshape.Theparameterö determinesthe degreeof undulation, ÷ determinesthe numberof periodsin a unit length,and Ç the macroscopiccircularshape.
As hasbeenshown in [25], the curvatureof a serpenoidcurve is a sinusoidalfunction of the arclength.In particular, it canreadilybeverifiedthatø $ ¿ % 587 ùúúû Ö 9 + �9À¿ + × + R Ö 9 + *9ü¿ + × + 7þýÿö ÷0IKJMLõ$�÷ ¿ % � Ç ý� The curvatureis relatedto the muscularforce requiredfor a snake to take on a given shape,andtheabove factsuggeststhat theserpenoidcurve canbeconsidereda naturalshapethata living snake takeson. See[25] for a thoroughdiscussionwith experimentaljustificationof this statement.
9

0 0.2 0.4 0.6−0.3
−0.2
−0.1
0
0.1
0.2
0.3
b = 2π
c = 0
a = π/3 (solid), π/2 (dashed), 2π/3 (dotted)
0 0.1 0.2 0.3 0.4
−0.15
−0.1
−0.05
0
0.05
0.1
0.15 a = π/2
c = 0
b = 2π (solid), 6π (dashed), 10π (dotted)
0 0.1 0.2 0.3 0.4
0
0.05
0.1
0.15
0.2
0.25
0.3 a = π/2
b = 10π
c = 0 (solid), π/2 (dashed), π (dotted)
Figure4. Variousserpenoidcurves.
Now we will give an approximationof the serpenoidcurve in termsof successively connected�segments,eachof which is a straightline with length / � . Let a serpenoidcurve bedescribedby � $ ¿ %and *�$ ¿ % with A��U¿�� . We consider��R� pointson thecurve specifiedby ¿ . 587 - / ��$�- 7UAã�! " ! )� � % .By definition,thevaluesof � $ ¿ . % and *�$ ¿ . % canbeapproximatedby� . 7 .�� � � � N)O;Id$ ö N)O;Ik$ � ÷� % R � Ç� % � * . 7 .�� � � � I#J�Lõ$ ö N"O;Id$ � ÷� % R � Ç� % Theoriginal serpenoidcurve is thenapproximatedby � segmentsconnecting$ � . � * . % ( - 7¡Aã�! ! ! �� � ).
Denotebyb . theangleof the - th segmentmeasuredfrom the � -axis in a counterclockwisemanner.
Then ��� L®$ b . % 7 * . �'* . z �� . � � . z � 7 I#J�L®$ ö N"O;I!$�-É÷ / � % R - Ç / � %N"O<Ik$ ö N"O;I!$�- ÷ / � % R - Ç / � %andhencewehaveb . 7:ö N"O;I!$ -É÷� % R - Ç� Notethattherelativeanglesthatdeterminetheshapeof thediscreteserpenoidcurvearegivenby§ . 5�7 b . � b .� � 7� I#JMLõ$�- ��R � T % R��where 587:ö������ IKJML®$ � T % ����� � � 5�7 ÷� � � 5�7 � Ç� Thus,therelativeangle § . changesin thesinusoidalmanneralongthe“discretearclength” - / � with theamplitude andthebias � . Any two adjacentrelativeangleshave thephasedifference� .
Serpentine Locomotion
Undulatorymotionof a snake canbeimitatedby changingtherelative anglesof thesnake robot in thefollowing manner:§ . $41 % 7� I#J�Lõ$�� 1�R:$2-õ�F % � % R�� � $�- 7 �! ! ! )� �ß�B % (19)
10

where � � , and � arethe parametersthat determinethe shapeof the serpenoidcurve realizedby thesnake robot, and � specifieshow fastthe serpentinewave propagatesalongthe body. Our hypothesisis that theserpentinegait is realizedwhentheshapechangeasin (19) is coupledwith theenvironmentthroughthe directionalfriction property. In this section,we verify by numericalsimulationsthat thishypothesisis indeedcorrect.Anotherobjective hereis to confirmthat thefollowing observation,madeby Hirose[25] for snake robotswith wheels,alsoappliesto our no-wheelsnake robot; Thespeedandthedirectionof theserpentinelocomotionaremainly determinedby � and � , respectively.
We consider(16) andthefirst equationin (18) to describethesnake robotmotionwherethesimplefriction model }ïÍ and }ÑÐ in (4) is usedto definethe matrices è , é , and ê as in (14). The robotparametersarespecifiedas� 7��ã� � . 7 kg � g . 7 m � Ç Æ 7:Aã Hz � Ç � 7 A Hz Theinput 3§ to (18) is generatedto achievetheserpentinemotion(19)asymptotically, andthelocomotionof the snake robot is simulatedwith differentparametervaluesfor ( � � � � � � ). Typical motionsareshown in Figs.5 ( � 7:A ) and6 ( � 7 A deg) wheretheotherparametersarefixedto:S7¡m;A deg � � 7��;A deg � � 7:m rad/s Theinertial ( �®� * ) framehasbeenrotatedafterthesimulationsuchthattheaveragevelocityof thecenterof gravity in thesteadystate(i.e., afterthetransientsdiedout) is directedtowardthepositive � -axis. Ineachfigure, theupperright pictureshows thetracesof thehead(dashedline) andthecenterof gravity(solid line) anda snapshotof thesnake robotat a certaintime. We seethat thesnake robotmovesin astraightline when � 7 A andmovesalonga circle when ���7UA . Thelower left andlower right picturesshow thetimehistoriesof thespeedÅ andtheangularspeed 3ò definedbyÅa5�7 3á « N"O;I òÊR 3á ¬ I#J�L ò � ò 5�7 � �� .�� � b . Notethat ò is theparameterthat representsthedirectionof thewholesnake robotand Å is speedof thecenterof gravity in the ò direction.Both Å and 3ò oscillatewith frequency � in thesteadystate,but theiraveragevaluesconvergeto certainconstantvalues.
Next we fix and � asbeforeandrun the samesimulationsfor differentvaluesof � and � . Theaveragevaluesof thespeedÅ andtheangularspeed 3ò , denotedby ave$ Å % andave$ 3ò % , arethenobtainedasfunctionsof � and � andareplottedin Figs.7 and8. Thevalueof ave$ Å % is thehighestat the lowerright cornerof Fig. 7, whereasthevalueof ave$ 3ò % is thehighestat theupperright cornerof Fig. 8. Weseethatwhen � is small,ave$ Å % is determinedby � andis insensitiveto � , whereasave$ 3ò % is determinedby � andis insensitive to � . Thus, � and � arethedominantparametersfor thespeedandthedirectionof theserpentinelocomotion,respectively.
Optimally Efficient Motion
In this section,weconsidertheserpentinemotionalonga straightline ( � 7:A ) andshow by simulationswhatchoicesof theparameters( � � � � ) aremost“efficient.” Let usfirst formally definetheefficiencyof thesnake robotlocomotion.Multiplying (13)by � 3b � 3á ��� from theleft, we have thefollowing powerequation:� � R � Õ 7 � .
11

0 2 4 6 8−40
−20
0
20
40
Time [s]
φ [d
eg]
0 2 4 6 8−1
0
1
2
3
4
5
Time [s]
Spe
ed [m
/s]
0 2 4 6 8−0.4
−0.2
0
0.2
0.4
Time [s]
Ang
ular
Spe
ed [r
ad/s
]
0 10 20 30 40−3
−2
−1
0
1
2
3
Head:dashedCG:solid
x [m]
y [m
]
Figure5. Serpentinelocomotion ( � 7:A deg).
0 2 4 6 8
−20
−10
0
10
20
30
40
Time [s]
φ [d
eg]
0 5 10 15−1
0
1
2
3
4
5
Time [s]
Spe
ed [m
/s]
0 5 10 15
−0.5
−0.4
−0.3
−0.2
−0.1
0
Time [s]
Ang
ular
Spe
ed [r
ad/s
]
−10 0 10−25
−20
−15
−10
−5
0
5
Head:dashed
CG:solid
x [m]
y [m
]
Figure6. Serpentinelocomotion ( � 7 A deg).
1 2 3 4 50
10
20
30
40
50
60
ω [rad/s]
γ [d
eg]
Average Speed
Figure 7. Contour plot of the averagespeedasa functionof � and � .
1 2 3 4 50
10
20
30
40
50
60
ω [rad/s]
γ [d
eg]
Average Angular Speed
Figure8. Contourplot of theaveragean-gularspeedasa functionof � and � .
with � � 5�7 99 1 � T 3b � � 3b R � T 3á � 3á�� Kinetic power� Õ 5�7 � 3b 3á � � �âè éé �²ê � � 3b 3á � Power loss� . 5�7 3§ � ª Inputpower
wherewenotedfrom (15) that99 1 $ T 3b � � 3b % 7 3b � � Þb R T 3b � 3� 3b7 3b � � Þb R T 3b � $ � 3ë R 3ë � � % 3b7 3b � � Þb R 3b � � 3b + 12

Fromthepower equation,we seethatpartof the input power
� . from the joint actuatoris convertedtothekinetic power
� � andtherestis lost as
� Õ dueto thefriction. In fact, thepower lossis essentialforthesnake locomotion,sinceit is thefriction forcethatgeneratestheforwardacceleration.In thesteadystate,theaveragekineticenergy is constant,andhencetheaveragekineticpowerave$ � � % is zero.In thiscase,on average,all theinput power
� . suppliedby thejoint actuatorsis consumedasthepower loss
� Õdueto thefriction.
Theobjectiveof thissectionis to find theoptimallyefficientmotionwithin theframework of serpen-tine locomotion.Moreprecisely, we investigatefor whatchoicesof theparameters( � � � � ) theaveragepower lossave$ � Õ % is minimalwhile keepingaprescribedaveragespeedave$ Å % .
Gridding the parameterspaceas �7 mã���ü�� ã�! ! " ��� ;A deg, � 7 �ã� kT � "! �! ! " �� "! A deg, and � 7Aã $#ü� � $#ü�! ! ! ��%# rad/s,thequantitiesave$ � Õ % andave$ Å % arecomputedvia simulationsfor eachparam-etertriplet ( � � � � ) andareplottedin Fig. 9 (left). The figure clearly shows the paretooptimal curvecorrespondingto theminimumpowerwith fixedvaluesof thespeed.Extractingthepointson thecurve,onecanfind the optimal relationshipbetweenthe averageforward speedave$ Å % andthe frequency �(Fig. 9 (right)). As seenin thefigure,ave$ Å % and � areroughlyproportionalto eachother. Theparetooptimal pointsareplotted in the ( � � � � ) spacetogetherwith its projectionsonto the threeplanesinFig. 10. Note that theparetooptimalphase-shift� is independentof theothervariablesandis �'& 7 �;Adeg.
Next werunthesamesimulationswith differentnumbersof links � to seehow theoptimallyefficientparametersdependupon � . For eachvalueof � 7:m� ! ! �� A , figuressimilar to Fig. 10canbedrawn, andthe qualitative propertiesof the optimal parametersarefound not to dependupon � . The meanvalue(over � � �)(ã *# ) of the optimal is found to be insensitive to � , whereasthat of � significantlychangeswith � , asshown in Fig. 11. It seemsthattheparetooptimalvalueof � is essentiallydeterminedby thenumberof links only andis roughlyequalto T,+ / � (thesolid curve in Fig. 11). This meansthatthesnake robotformsjust oneperiodof theserpenoidcurvewhenthepowerefficiency is optimized.
Finally, we run thesamesimulationswith differentvaluesof thefriction coefficient Ç Æ . Therelation-shipbetweenthemeanvalueof theoptimal andtheratio Ç Æ|/ Ç � is shown in Fig. 12. Weseethat is anincreasingfunctionof Ç Æ|/ Ç � . Thusthesnake robotshouldundulatewith largeramplitudewhentheratioÇ Æ|/ Ç � is larger(i.e.,whenthesnake robotis morelikely to slip in thenormaldirection).
In summary, we have foundthefollowing propertiesof theparetooptimalparameters:- � is a linearfunctionof theforwardspeed.-. is anincreasingfunctionof theratio Ç Æ|/ Ç � of thefriction coefficients.- � is adecreasingfunctionof � ; roughly, � 7 T,+ / � .
Theseobservationsareusefulfor (heuristically)determiningtheoptimalcontrollaw for thesnakerobot.
Synthesisof Snakelike Locomotion
Control Ar chitecture
Recall from the analysisin the previous sectionthat the parameters� and � in the serpentinemotiondeterminethespeedanddirectionof thesnake robot,respectively. On theotherhand,we foundthatthevaluesof and � thatgiveoptimalefficiency aredeterminedby thefriction coefficientsandthenumber
13

0 2 4 60
50
100
150
200
250
300
350
Speed [m/s]In
put P
ower
[J/s
]
0 2 4 6 80
1
2
3
4
5
ω [r
ad/s
]
Speed [m/s]
Figure9. Speed/power trade-off.
050
100150
0
50
0
2
4
β [deg]α [deg]
ω [r
ad/s
]
0 50 100 1500
20
40
60
80
β [deg]
α [d
eg]
0 50 100 1500
1
2
3
4
5
β [deg]
ω [r
ad/s
]
0 20 40 60 800
1
2
3
4
5
α [deg]
ω [r
ad/s
]
Figure10. Pareto-optimalparameters.
2 4 6 8 100
50
100
150
n
β [d
eg]
Figure11. Phaseshift � vs. the numberof links � .
0 0.2 0.4 0.6 0.820
30
40
50
60
70
α [d
eg]
ct / c
n
Figure12. Undulationangle vs. thera-tio of friction coefficients Ç Æ�/ Ç � .
14

of links, respectively. Hencewefix and � anduse� and � to controlthespeedandthedirectionof thesnakerobot. In thesimulationsshown below, weconsiderthefive-link snake robot( � 7�# ) with � . 7 kg and g . 7 m, andwefix and � to thefollowing values:S7 + T � � 7 T,+� Figure13 shows the block diagramof the basiccontrol system. The block labeled“Snake Robot” isgivenby (13). Thecontrollermainlyconsistsof inner/outerloops.Theouter-loopcontrollers�0/ $ ¿ % and�01 $ ¿ % are,respectively, for speedanddirectioncontrolsandgeneratethecommandmotionvariable § �throughthetime-varyingtransformation(representedby
ä)§ �. 5872 IKJML®$3� 1�R:$�-®�B % � % R4�
to achieve thedesiredmotion Å � and ò � . The inner-loop controller �65 $ ¿ % generatesthetorque ª sothattheactualmotion § follows thecommandsignal § � .
77
7ä �01�6588
�0/� 98
99 9 9
SnakeRobot
:9 ;
;§ �
�Å �ò �
ª § ò Å�
��
Figure13. Controlsystemconfiguration.
In the first-rounddesign,we tried PID controllersfor �0/ $ ¿ % , �01 $ ¿ % , and �65 $ ¿ % andfound that thedesignwasnotsuccessful.In particular, wehaddifficulty tuningthePID parametersto yield satisfactorymotioncontrolperformance,especiallyfor speedcontrol. Hencewe decidedto usePID controllersfor�01 $ ¿ % and �65 $ ¿ % only andto design�0/ $ ¿ % in amoresophisticatedmanner. Weexplain theprocedurefordesigning�0/ $ ¿ % in thenext section.
SpeedControl System
In this section,we developa speedcontrol system�0/ $ ¿ % within the control architectureintroducedintheprevioussection.In thesequel,we usethesimplefriction modelof thesnake robotwith Ç Æ 7þAü Hz and Ç � 7 A Hz for control design. The morerealisticCoulombfriction modelwill be usedforsimulationsto validateour resultafterthecontroldesign.
To examinehow thevariable� affectsthespeedŠ, wehavechanged��$21 % in asinusoidalmannerandobserved Š$21 % by simulation. As a result,we found that Š$21 % is alsoa sinusoidlike signal,but with an
15

increasingamplitudedivergingto infinity. Thusthemappingfrom � to Å is notbounded-input,bounded-output(BIBO) stable,andthis factmotivatedusto consideranew controlinput thatgivesaBIBO stablemappingandhencewouldbemoresuitablefor speedcontrol.
Herewe introducethefollowing variable 3< asanew controlinput:3<^5�7 9=<9 1 7 3�ì1õR>� � <�587 � 1 (20)
Notethat 3< is the“effective frequency” of thesinusoidalsignal IKJML®$3� 1 % with time-varyingfrequency � .If 3< $21 % is sinusoidal,so is thesignal < $ 7 � 1 % . Hence��$41 % approacheszeroasthe time goesto infinity,eventhough 3< $41 % is asinusoidalsignalwith afixedamplitude.Thusweexpectthatwhen 3< is sinusoidal,theresultingspeedÅ would not divergeandthemappingfrom 3< to Å would beBIBO stable.We foundby simulationthatthis is indeedthecase.
We have run simulationsfor sinusoidalinputs 3< usingthesimplefriction model. In particular, 3< ischosenas3<æ72? IKJMLõ$A@ 1 %for fixedvaluesof @ and ? . Thevalueof ? is setto 1 rad/s.Wehavetriedothervaluesaswell andfoundthattheresultsgivenbelow areinsensitiveto ? . Themotionvariable 3§ . is calculatedby3§ . $41 % 7� N"O;I!$ < $21 % R¡$�-õ�F % � % 3< $21 %andis appliedastheinput to thesnakerobotmodel(18). Notethattheinitial value < $ A % is equalto zeroby definition.
Typical speedresponsesare plotted in Fig. 14 for the case @ 7 Aã yA and in Fig. 15 for the case@ 7B# . FromFig. 14 we seethattheoutputsignal Å containshigh-frequency harmonics,but thelargelydominantpart is thesinusoidwith thesamefrequency astheinput. Whentheinput frequency is higher(seeFig. 15), a similar commentappliesaswell, with a notabledifferencebeingthat thephaselag andtheamplitudeattenuationof theoutput Å aremoreapparent.Thismeansthat themappingfrom 3< to Å isalmostlinear! Thus,choosingtheeffectivefrequency 3< astheinput,thehighly nonlinearrobotdynamicscanbequasi-linearized.
0 100 200 300 400 500 600−1.5
−1
−0.5
0
0.5
1
1.5
Time [s]
η [r
ad/s
]
0 100 200 300 400 500 600−1.5
−1
−0.5
0
0.5
1
1.5
Time [s]
v [m
/s]
Figure14. SpeedresponseÅ for sinusoidalin-put 3< with @ 7¡Aü 8A .
0 1 2 3 4 5 6 7−1
−0.5
0
0.5
1
Time [s]
η [r
ad/s
]
0 1 2 3 4 5 6 7−0.5
0
0.5
Time [s]
v [m
/s]
Figure15. SpeedresponseÅ for sinusoidalin-put 3< with @ 7C# .
Repeatingthe simulationfor differentvaluesof @ , we obtaina “frequency response”of the snakerobot from the input 3< to the output Å , wherewe ignorethe higherfrequency harmonicsof theoutput
16

10−2
10−1
100
101
102
−40
−30
−20
−10
0
10
Mag
nitu
de [d
B]
magnitude responseapploximation
10−2
10−1
100
101
102
−100
−80
−60
−40
−20
0
Pha
se [d
eg]
Frequency [rad/s]
phase responseapploximation
Figure16. Frequency response: 3< � Å ( � 7A ).
10−2
10−1
100
101
102
−50
−40
−30
−20
−10
0
10
Mag
nitu
de [d
B]
↓ γ = 0
γ = 0.5 →
10−2
10−1
100
101
102
−100
−80
−60
−40
−20
0
Pha
se [d
eg]
Frequency [rad/s]
↓ γ = 0
γ = 0.5 →
Figure17. Approximatedfrequency responses:3< � Å ( AD� � ��Aã $# ).signal.Thegainandphaseplotsthusobtainedareshown by thesolid curvesin Fig. 16. Fromthefigureweseethatthemappingfrom 3< to Å maybeapproximatedby afirst-ordertransferfunctiongivenbyE $ ¿ % 7 T ! # GF¿ R&T !ÂTH! �whosefrequency responseis plottedby the dashedlines in Fig. 16. Thus, introducinga new controlinput 3< , we mayapproximatethedynamicsof thesnake robotby a simplefirst-ordertransferfunction.Clearly, suchapproximationshouldbeusefulfor speedcontroldesign.
Theaboveapproximatedmodelis valid only for thecase� 7¡A in theserpentinemotion§ . $41 % 7� I#J�Lõ$�� 1�R:$2-õ�F % � % R�� Recallthat � is usedto control thedirectionof thesnake locomotion,andwe needto considerthecasewhere � is nonzeroaswell to allow for thedirectionalcontrol. Herewe considerthevaluesof � suchthat ý � ýI�ÝAü *# .
Sincethe locomotionof thesnakerobotis “symmetric” in � , we considerthe interval AJ� � ��Aü *#only. For eachvalueof � within theinterval,weobtainedthefrequency responsefrom 3< to Å asdescribedabove. The responsesareapproximatedby first-ordertransferfunctionsandplotted in Fig. 17. Thetransferfunctionfor each� is givenbyE $ ¿ % 7 ÷¿ R öwherethe parametersö and ÷ vary with � , asshown in Fig. 18. We seethat the valuesof ö and ÷ areapproximatelythesamefor eachfixed � andvary in the interval Aã $#K��öML ÷ ��m . Thuswe have thefollowing linearsystemmodelwith anuncertainparameterN :E�O $ ¿ % 7 ö¿ R ö � ö^587:ö ñ R'N öã��� ý N ýP� whereö ñ 5�7 F # and öã� 5�7 T # . Thismodelis suitablefor robustcontroldesign.
We designa controllersuchthat the speedÅ of the snake robot closelyfollows a given commandsignal Å � . In particular, we considertheblock diagramin Fig. 19 anddesign Q / $ ¿ % thatminimizesanupperboundon theworst-case� + gain(see,e.g.,[34], [35]) from Å � to ¯ 5�7 �<¯ � ¯ + ��� , wheretheworst
17

0 0.5 1 1.5 2 2.5 3 3.50
0.5
1
1.5
2
2.5
3
3.5
a
b
↓
γ = 0
← γ = 0.5
Figure18. Theparametersö and ÷ for differentvaluesof � .
7�ð
Q / $ ¿ %�
ERO $ ¿ %: : :;: ;
; ;;�Å
Š��
¯ � ¯ +3<
ÅFigure19. Speedcontrolsystem.
caseis takenover all possibletime-varyingparametricuncertaintiesNü$21 % v �¾�� � � . Theparameter�
istheweighton thecontrolsignal 3< , to bespecifiedlater.
Thegeneralizedplantfor thiscontrolsystemis givenbyoppppppppq3Å 3�¯ ñ¯ �¯ +*rtssssssssu 7
oppppppppq� ö ñ A öã� A ö ñ�� A A A�� A A A A A A AA A A A ��� A A A
rtssssssssuoppppppqÅ�áÅ �3<rtssssssu � á�7 N�¯ ñ
Approximatingthe worst-case� + gain by the scaled�TS
norm [36], [37], we obtaina controller thatminimizesthescaled
�DSnormasfollows:Q / $ ¿ % 7:Aã ! m TUF�R Aã V ;A Tü¿
wherethedesignparameteris chosento be� 7 by trial anderror. Notethat thecontrollerturnedout
to have theproportional-integralstructure.
18

Simulation Results
Wenow havea totalcontrolsystemfor thesnakerobotin which themappingfrom $ Å � � Å % and $4ò � � ò %to § � in Fig. 13 is replacedby<æ7 ¿ Q / $ ¿ % $ Å � � Å % � � $ ¿ % 7��01 $ ¿ % $2ò � � ò % � § � 72 IKJML®$ < R:$2-õ�F % � % R�� Thecontrollers�01 $ ¿ % and �65 $ ¿ % arechosento havethePID structureandtheirparameterstunedby trialanderror. The controller Q / $ ¿ % is the onedesignedin theprevious sectionvia a scaled
�DSsynthesis
method.In our simulation,theparametersof thesnake robotarechosenasg . 7 m � � . 7 kg � $2- 7 �! ! ! �� � %
ThecommandvelocitysignalsÅ � $41 % 5�7 m/s� ò � $21 % 587 + T rad
areappliedwhenthesnake robotis initially straight(b . $ A % 7:A ) andat rest( 3b . $ A % 7:A , 3á $ A % 7:A ).
First,we run asimulationfor thesimplefriction modelwith thefollowing parameters:Ç Æ 7�Aã � Ç � 7 Aã� $�- 7 �! " ! )� � %�01 $ ¿ % 7 �D � �65 $ ¿ % 7 $> A;A R A¿ R� A;¿ % ç The result is shown in Fig. 20 wherethedashedlines in the speedÅ anddirection ò plots indicatethecommandedsignalsandthesolidlinesaretheactualresponsesof thesnakerobot.Thetransientresponseof thespeedmaynot seemadequate;however, it is a resultof our tuningthecontroller �01 $ ¿ % suchthatthesnake robotstartsmoving with boththedesiredspeedandthedesireddirectionassoonaspossible.Whencontrollinga snake robot, it doesnot make senseto have it move at theright speedin thewrongdirection.Thus,in ourview, theresponsesin Fig. 20aresatisfactory.
Next we runasimulationfor theCoulombfriction modelwith thefollowing parameters:Ô Æ 7:Aã � Ô � 7 Aã� $�- 7 �! ! ! )� � %�01 $ ¿ % 7 � Aã ym=#ü� �65 $ ¿ % 7 $ #<A;A R m;A¿ R� A;¿ % ç Theresultis shown in Fig. 21. We seethat thespeedanddirectionresponsesaremoreoscillatorythanthe caseof thesimplefriction model,but theeffect of theseoscillationson theactualtrajectoryis notsubstantial.
19

0 5 10 15−1
0
1
2
3
Time [s]
Spe
ed [m
/s]
speed desired speed
0 5 10 150
20
40
60
80
100
120
Time [s]
Dire
ctio
n [d
eg]
direction desired direction
Figure 20. Simulationresult (simple frictionmodel).
0 5 10 15 20 250
0.5
1
1.5
Time [s]
Spe
ed [m
/s]
speed desired speed
0 5 10 15 20 250
20
40
60
80
100
120
140
Time [s]
Dire
ctio
n [d
eg]
direction desired direction
Figure21. Simulationresult(Coulombfrictionmodel).
Experimental Validation
In this section,wevalidateour controldesignstrategy througha laboratoryexperiment.
SystemConfiguration
The experimentaltestbedmainly consistsof five components—asnake robot, motor drivers, a CPUboard,aCCD camera,andapersonalcomputer(PC)(seeFig. 22).
Thesnake robotis simplyaconnectionof five rigid links with four jointswith totalweightof 1.8kg(Fig. 23). Eachlink is madeof aluminumof length0.15m andhasedgesat the bottomthat generatelargerfriction forcesin thenormaldirectionthanin thetangentialdirection(Fig. 24).
Mountedon eachjoint is a 1.7 W DC motor (RH–5A HarmonicDrive; Linx) with an embeddedencoder(28,000pulsesperrevolution). ThemotordriversandtheCPUboardaremountedon thesnakerobot.Two voltages(5 V for logic circuitson themotordriversandtheCPUboardand12 V for drivingthemotor)aresuppliedfrom outsidethroughcables.
TheCCD camera(CV-10BX; JAI) collects30 imagespersecondandis usedto detectthepositionsof two markedpointsonthefirst link of thesnakerobot.ThePCreceivestheimagedatafrom thecameraevery 33 msandcomputesthecoordinates$ ����� * � % of themiddlepoint andtheabsoluteangle
b � of thefirst link. This imageprocessingtakesabout60 msandhenceapproximatelyoneout of two imagedatapointsfrom theCCD camerais discarded.Informationon thepositionandorientationof thefirst link issentfrom thePCto theCPUboardthroughanRS-232Cserialcable.
TheCPUboardcalculatesthecommandtorque W (moreprecisely, a quantityto beusedasthedutyratio W of the PWM signal,asexplainedbelow) usingthe velocity commandsignal ( Å � � ò � ), the posi-tion/orientationinformationfrom thePC,andtherelative angleinformationfrom thecounter, all basedon thecontrolrule previously discussedwhere ª is replacedby W . Thesamplingrateof theCPUboardis 10 ms.
ThemotordriversreceivethetorquecommandW fromtheCPUboardandthengeneratePWMvoltagesignalswith theduty ratio W . for themotoron the - th joints,where W . ( - 7 �" ! ! �� �Ä�Ý ) is the - th entryof thevector W .
20

Figure22. Systemconfiguration.
Figure23. Top view of thesnakerobot. Figure24. The“belly” of thesnake robot.
Modeling and Control Design
Thefirst stepin our controldesignis themodelingof thesnake robot. Insteadof taking the frequencyresponsesfrom 3< to Å , asin theprevioussection,we chooseto modelthesystemby stepresponsesforsimplicity. Anotherdifferencefrom the simulationcaseis that the minor feedbackloop for the shapecontrolis implementedfirst asfollows:�65 $ ¿ % 7 T A R F ¿ R&T ¿andthenstepresponsesaretaken for thesnake robotwith theminor feedback loop. Fig. 25 shows theresponsesÅ whenthestepinputsof magnitude+ /H� rad areappliedat time 1 7X� s to 3< with differentvaluesof � . We have alsoobserved stepresponseswith different input magnitudes,andfound, as inthesimulationstudy, that theresponsesnormalizedby theinput magnitudesareinsensitive to theinputmagnitudes.The threeresponsesfor � 7 A are obtainedthroughthreedifferent experiments. Theresponsesarefoundto beoscillatory, but we go on to obtaina crudeapproximationof thesystemfrom
21

3< radto Å m/sasfollows:E�O $ ¿ % 7:Aã yA;m !ÂTÑ� ö¿ R ö � ö^587:ö ñ RYN öã��� ý N ýP� whereö ñ 5�7�Aã $#U# and öã� 5�7�Aã V(=# . Thestepresponsesof
ERO $ ¿ % for N 7CZ arealsoshown in Fig. 25.
5 10 15 20 25 30 35−1
0
1
2
3
4
Time [s]
v [c
m/s
]approximation(a=0.1) experiment(γ =0) experiment(γ =0) experiment( γ =0) experiment(γ =0.1)approximation(a=1)
Figure25. Stepresponses.
Basedon this linearuncertainsystemmodel,we designeda controller Q / $ ¿ % rad/masdescribedintheprevioussectionwith thedesignparameter
� 7:Aã asfollows:Q / $ ¿ % 7 T #ü $#<m R �ã $��( T¿ The parametersof the PID controller �01 $ ¿ % are tunedthroughactualexperiments,anda suitable
controlleris foundto bea simpleconstantgain:�01 $ ¿ % 7 � Aã Thecontrol systemthusobtainedis discretizedvia Tustin transformation(e.g.,[38]) with thesam-
pling rateof 10 msandimplementedon theCPUboard.
Experimental Results
An experimentis conductedunderthefollowing conditions:Thestepvelocity commandsÅ � $41 % 5�7:Aü 8A m �;A m/sò � $21 % 587¡A rad
areappliedwhenthesnake robot is at restandits body is straightat anangleof about25 deg from thedesireddirectionof locomotion.
Figure26 shows the motion picturesof thesnake robot wherethewhite andblack arrows, respec-tively, indicatethe initial anddesireddirectionsof the snake motion. Fig. 27 shows the time historiesof the speedÅ of thecenterof gravity andthe direction ò of the whole body. We seethat thespeedÅsatisfactorily tracksthedesiredspeed.Thedirectionparameterò is oscillatory, but its averageis approx-imatelyzero,meaningthatthesnakerobotis moving towardthedesireddirectiononaverage.To justifythisclaim,themotionof thesnakerobotis shown onthe � - * planeusingtheexperimentaldata(Fig.28).The snake robot movesfrom right to left in the figure. We seethat the directionof the snake robot is
22

1 7 [
1 7C#[
1 7 T A[
1 7 T #[
1 7:m;A[
1 7¡m=#[
1 7�(ÂA[
1 7�#<A[
1 72�;A[
1 7 F AFigure26. Locomotionof thesnakerobot.
23

10 20 30 40 50 60
−2
−1
0
1
2
3
4
Time [s]
v [c
m/s
]v desired v
10 20 30 40 50 60
−40
−20
0
20
40
Time [s]
Dire
ctio
n [d
eg]
direction desired direction
Figure 27. Speedand direction of the snakerobot.
−80 −60 −40 −20 0 20 40 60 80
−100
−80
−60
−40
−20
0
← Desired Direction
t = 1
↓
t = 8
↓
t = 74
↓
t = 28↑t = 46
↑
x [cm]
y [c
m]
Figure28. Snake motionfrom theexperimen-tal data.
not alignedwith thedesireddirectionat thebeginning,but therobotsoonbeginsmoving in thedesireddirection.
In summary, we concludethatour controlstrategy yieldeda reasonablevelocity controlsystemforthelocomotionof thesnake robot.
Conclusion
Wehavedescribedasnakerobotwithoutwheelsanddevelopedits modelbasedonthedirectionalfrictioncoefficients. After the model transformationthat decouplesthe inertial locomotionfrom the internalshapemotion,anoptimallyefficientserpentinelocomotionis investigated.Basedontheanalysisresults,a velocity controlschemeis proposedusinga quasi-linearizinginput transformation,andits validity isdemonstratedvia a laboratoryexperimentwith afive-link serpentinerobot.
The resultsreportedin this article focusedon the planarserpentinegait that is suitedfor locomo-tion in anenvironmentwherefriction with directionalpreferencecanberealized.While amathematicalframework is establishedfor modeling,analysis,andsynthesisof theserpentinegait, tremendousadapt-ability of snakelikemechanismto ruggedenvironmentshasnotyetbeenfully exploited.Studiesof othergaits remainto be doneto make a snake robot capableof, for example,adaptingto isotropic frictionenvironmentsand/orperformingthreedimensionalmotion.
Acknowledgments: The authorsgratefully acknowledgehelpful discussionswith B.D.O. Anderson,S. Hirose,T. Mita, P. Prautsch,H. Yamauchi,andR. Nakashima.This researchis supportedby TheGrant-in-Aidfor Center-Of-ExcellenceResearchProjectof SuperMechano-Systemsby TheMinistry ofEducation,Science,SportandCulturein Japan.
24

Appendix
SomeIntegral Formulae
Lemma 1 Letscalars \ , ] , and ^`_�a begiven.Thefollowing hold:bc ^6dTef e sgngA\`hY]jiGkmlnipo satgq\sr�]j^tkb^%uvd ef e sgngA\ph']ji,kmi"lIi`o dzsgq\wr�]%^xkwhere functionssatgzy{r|yk anddzsgzy}rxyk aredefinedby
satg�~�r���k0�$o����� ����b g�~M_B� ����k~��,� gAa���� ~��P��� ����k� b g�~M� � � ����ka g�~�o�a=k r dzsg�~�r���k0�*o ��� �� b � g�~�����k u gq��_B� ~���ka g%� ���=��� ~���kg�~�����k u � b gq��� � � ~���k��
PROOF. It is straightforwardto verify theresultby calculatingtheintegral for differentcases.Hencetheproof is omitted.
Notethatsatg�y}r|y*k anddzsgzy{r|yk arethesaturationandthe“deadzonesaturation”functionsthatcanbeplottedasin Fig. 29. It is intuitively clearandeasyto verify that both of thesefunctionsbecomethesignumfunctionin extremecases:
satg�~�r�a=k�o sgng�~�kjr dzsgqa�r���k�o sgng���k �
-|y|
|y| x
sat(x,y)
-1
1
-1
1
-|x|
|x| y
dzs(x,y)
Figure29. Functionssatgzy*k anddzsgzy*k .
25

References
[1] M. Raibert,LeggedRobotsthatBalance. Cambridge,MA: MIT Press,1986.
[2] S. SongandK. Waldron, Machinesthat Walk: TheAdaptiveSuspensionVehicle. Cambridge,MA: MITPress,1989.
[3] D. J.Manko, A General Modelof LeggedLocomotionon Natural Terrain. Boston,MA: Kluwer AcademicPub., 1992.
[4] M. Vukobratovic, B. Borovac,D. Surla,andD. Stokic,BipedLocomotion:Dynamics,Stability, Control andApplication. New York, NY: SpringerVerlag,1990.
[5] P. Spanos,R. Berka,andP. Tratskas,“Multisegmentlargespacerobot: Conceptanddesign,” J. AerospaceEng., vol.13,no.4,pp.123–132,2000.
[6] D. ReznikandV. Lumelsky, “Sensor-basedmotionplanningin 3 dimensionsfor a highly redundantsnakerobot,” AdvancedRobotics, vol.9, no.3,pp.255–280,1995.
[7] Y. ShanandY. Koren, “Designandmotionplanningof a mechanicalsnake,” IEEE Trans.Sys.Man Cyb.,vol.23,no.4,pp.1091–1100,1993.
[8] Z. Bayraktaroglu,F. Butel,P. Blazevic, andV. Pasqui,“Geometricalapproachto thetrajectoryplanningof asnake-like mechanism,” in Proc. IEEE Int. Conf. Intel. RobotsSys., Kyongju,Korea,1999,pp.1322–1327.
[9] B. KlaassenandK. Paap,“GMD-SNAKE2: a snake-like robot driven by wheelsanda methodfor motioncontrol,” in Proc. IEEE Int. Conf. Robotics& Auto., Detroit,MI, 1999,pp.3014–3019.
[10] S. Ma, “Analysisof snake movementforms for realizationof snake-like robot,” in Proc. IEEE Int. Conf.Robotics& Auto., Detroit,MI, 1999,pp.3007–3013.
[11] K. Dowling, “Limbless locomotion: learningto crawl,” in Proc. IEEE Int. Conf. Robotics& Auto., Detroit,MI, 1999,pp.3001–3006.
[12] G. Poi, C. Scarabeo,andB. Allotta, “Traveling wave locomotionhyper-redundantmobile robot,” in Proc.IEEE Int. Conf. Robotics& Auto., Leuven,Belgium,1998,pp.418–423.
[13] L. Jammes,Y. Kyodo,M. Hiraki, andS.Ozono,“Designconceptandundulatorymotionmodeof amodularsnake-like robot,” in Proc. IEEEInt. Conf. Intel. RobotsSys., Grenoble,France,1997,pp.1794–1799.
[14] M. Nilsson,“Snake robotfreeclimbing,” IEEEControl SystemsMagazine, vol.18,no.1,pp.21–26,1998.
[15] R. Worst andR. Linnemann,“Constructionandoperationof a snake-like robot,” in Proc. IEEE Int. JointSympo.Intel. Sys., Gaithersburg, MD, 1996,pp.164–169.
[16] J.GrayandH. Lissmann,“The kineticsof locomotionof thegrass-snake,” J. Exp.Biol., vol.26,no.4,pp.354–367,1950.
[17] H. Lissmann,“Rectilinearlocomotionin asnake(Boaoccidentalis),” J. Exp.Biol., vol.26,pp.368–379,1950.
[18] B. C. Jayne,“Kinematicsof terrestrialsnake locomotion,” Copeia, vol.4, pp.915–927,1986.
[19] B. C. Jayne,“Muscular mechanismsof snake locomotion: an electromyographicstudyof the sidewindingandconcertinamodesof Crotaluscerastes,NerodiafasciataandElapheobsoleta,” J. Exp. Biol., vol.140,pp.1–33,1988.
26

[20] B. C. JayneandJ.D. Davis, “Kinematicsandperformancecapacityfor theconcertinalocomotionof asnake(Coluberconstrictor),” J. Exp.Biol., vol.156,pp.539–556,1991.
[21] S.Secor, B. Jayne,andA. Bennett,“Locomotorperformanceandenergeticcostof sidewinding by thesnakeCrotaluscerastes,” J. Exp.Biol., vol.163,pp.1–14,1992.
[22] S.Bennet,T. McConnell,andS.Trubatch,“Quantitative analysisof thespeedof snakesasa functionof pegspacing,” J. Exp.Biol., pp.161–165,1974.
[23] Y. UmetaniandS. Hirose,“Biomechanicalstudyof serpentinelocomotion,” in Proc. 1st RoManSySymp.,Udine,Italy, 1974,pp.171–184.
[24] S. HiroseandY. Umetani,“Kinematic controlof active cordmechanismwith tactilesensors,” in Proc. 2ndRoManSySymp., Warsaw, Poland,1976,pp.249-260.
[25] S.Hirose,Biologically InspiredRobots:Snake-Like Locomotors andManipulators. New York, NY: OxfordUniversityPress,1993.
[26] S.HiroseandA. Morishima,“Designandcontrolof a mobilerobotwith anarticulatedbody,” Int. J. Robot.Res., vol.9, no.2,pp.99–114,1990.
[27] J. Burdick, J. Radford,andG. Chirikjian, “A ‘sidewinding’ locomotiongait for hyper-redundantrobots,”AdvancedRobotics, vol.9, no.3,pp.195–216,1995.
[28] G. Chirikjian andJ. Burdick, “The kinematicsof hyper-redundantrobot locomotion,” IEEE Trans.Robot.Automat., vol.11,no.6,pp.781–793,1995.
[29] J. Ostrowski andJ. Burdick, “The geometricmechanicsof undulatoryrobotic locomotion,” Int. J. RoboticsRes., vol.17,no.7,pp.683–701,1998.
[30] P. Prautsch,T. Mita, andT. Iwasaki,“Analysisandcontrolof a gait of snake robot,” Trans.IEEJ, IndustryAppl Soc., vol.120-D,no.3,pp.372–381,2000.
[31] H. Date,Y. Hoshi, andM. Sampei,“Dynamic manipulabilityof a snake-like robot with considerationofsideforceandits applicationto locomotioncontrol,” in Proc. Int. Sympo.AdaptiveMotion of AnimalsandMachines, Montreal,Canada,2000.
[32] K. Kyriakopoulos,G. Migadis, andK. Sarrigeorgidis, “The NTUA snake: Design,planarkinematics,andmotionplanning,” J. RoboticSystems, vol.16,no.1,pp.37–72,1999.
[33] R. M. Murray, Z. Li, andA. S. Sastry, A MathematicalIntroductionto RoboticManipulation. BocaRaton:CRCPress,1993.
[34] R. E. Skelton,T. Iwasaki,andK. M. Grigoriadis,A UnifiedAlgebraic Approach to Linear Control Design.London,UK: Taylor& Francis,1997.
[35] K. Zhou,J.Doyle,andK. Glover, RobustandOptimalControl. UpperSaddleRiver, NJ:PrenticeHall, 1996.
[36] J.C. Doyle, A. Packard,andK. Zhou,“Review of LFTs,LMIs, and � ,” in Proc.IEEEConf. DecisionContr.,Brighton,UK, 1991,pp.1227–1232.
[37] A. Packard,K. Zhou,P. Pandey, andG. Becker, “A collectionof robustcontrolproblemsleadingto LMIs,”in Proc. IEEE Conf. DecisionContr., Brighton,UK, 1991,pp.1245–1250.
[38] G. F. Franklin, J. D. Powell, andM. L. Workman, Digital Control of DynamicSystems. Reading,MA:Addison-Wesley, 1990.
27
Related Documents