1 I. CINEMATICA MOTTO: La început a fost mecanica! Max von Laue, "Istoria fizicii" INTRODUCERE. Mecanica este parte a fizicii care studiază primul și cel mai simplu tip de mișcare observat de om, mișcarea mecanică. Căderea sau balansul copacilor sub acțiunea vântului, rostogolirea pietrelor, ploaia care nu se mai oprește, cursurile sau cascadele de apă, atacul sau fuga unui animal reprezintă doar câteva tipuri de mișcare mecanică observate de omul primitiv. "Mecanica este știința mișcării ; menirea ei este de a descrie complet și în modul cel mai simplu mișcările ce se produc în natură". (Robert Kirchhoff, "Prelegeri de mecanică") Fenomenele din natură, care se desfășoară spontan, fără intervenția omului, au constituit din cele mai vechi timpuri obiect de observație și – ulterior – obiect de studiu sistematic, în condiții de laborator. Încă de la început, cunoștințele empirice acumulate de om în scopul unor activități practice, au condus la inventarea primelor mecanisme simple, primele tehnologii, menite să le ușureze viața. Pârghia, scripetele, planul înclinat, șurubul (melcul lui Arhimede), capcanele iar mai târziu mașinile de luptă (catapultele și balistele) sunt exemple de dispozitive în construcția și funcționarea cărora s -a ținut cont de aceste noi cunoștințe, dobândite din observarea naturii. Mecanica, numită mecanica clasică, sau mecanica newtoniană, a fost elaborată de Isaac Newton și expusă în celebra sa carte „Principiile matematice ale filosofiei naturii” (1687), unde sunt formulate cele trei legi sau principii ale mecanicii, precum ș i celebra lege a atracției universale, aplicabilă și mișcării sistemului nostru solar. Mecanica se împarte în trei capitole: I. Cinematica este capitolul mecanicii care studiază mișcarea corpurilor fără a interesa natura acestora, masa lor, cauzele și efectele mișcării; în cinematică se stabilesc expresii matematice care permit calculul poziției, vitezei și accelerației corpurilor aflate în mișcare, în orice moment. II. Dinamica este capitolul mecanicii care se studiază mișcarea corpurilor materiale (punctelor materiale) prin prisma cauzelor fizice care produc sau schimbă mișcarea acestora. În dinamică se stabilesc legile mișcării corpurilor pe baza interacțiunilor dintre ele. III. Statica este capitolul mecanicii care studiază sistemele de forțe pentru stabilirea condițiilor de echilibru mecanic ale unui corp aflat în stare de repaus sau de mișcare. I. Cinematica (punctului material). Noțiuni introductive. Mișcarea reprezintă schimbarea poziției unui corp față de poziția altui corp, considerat fix și numit corp de referință, sau reper. Modificarea stării de mișcare va fi studiată doar pur descriptiv, fără a lua în considerare cauzele care o determină. O astfel de abordare geometrică a mișcării este cunoscută drept abordarea cinematică, iar capitolul corespunzător din mecanică poartă numele de cinematică. Un corp este considerat în repaus dacă poziția lui față de alte corpuri nu se schimbă. Evident, nu există repaus absolut. Ori de câte ori considerăm un corp în repaus față de un corp, vom găsi un alt corp față de care să considerăm corpul respectiv în mișcare. Din acest motiv spunem că repausul este un caz particular de mișcare. Mișcarea este o proprietate intrinsecă a materiei, în sensul că nu există materie în repaus absolut, după cum nu poate fi concepută mișcare fără suportul material. 1. Sistemul de referință este un ansamblu constituit dintr-un corp fix, ales arbitrar, numit corp de referință, sau reper, căruia i se asociază un instrument pentru măsurarea timpului și un instrument pentru măsurarea distanțelor. Pentru studierea unui fenomen fizic trebuie, obligatoriu, precizat sistemul de referință la care ne raportăm. Din punct de vedere matematic sistemul de referință se reprezintă ca un ansamblu rigid de puncte din spațiu față de care se raportează poziția unui corp în mișcare și căruia i se atașează un sistem

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
I. CINEMATICA MOTTO:
La început a fost mecanica!
Max von Laue, "Istoria fizicii"
INTRODUCERE.
Mecanica este parte a fizicii care studiază primul și cel mai simplu tip de mișcare observat de om,
mișcarea mecanică. Căderea sau balansul copacilor sub acțiunea vântului, rostogolirea pietrelor, ploaia
care nu se mai oprește, cursurile sau cascadele de apă, atacul sau fuga unui animal reprezintă doar câteva
tipuri de mișcare mecanică observate de omul primitiv.
"Mecanica este știința mișcării ; menirea ei este de a descrie complet și în modul cel mai simplu
mișcările ce se produc în natură". (Robert Kirchhoff, "Prelegeri de mecanică")
Fenomenele din natură, care se desfășoară spontan, fără intervenția omului, au constituit din cele mai
vechi timpuri obiect de observație și – ulterior – obiect de studiu sistematic, în condiții de laborator.
Încă de la început, cunoștințele empirice acumulate de om în scopul unor activități practice, au condus
la inventarea primelor mecanisme simple, primele tehnologii, menite să le ușureze viața.
Pârghia, scripetele, planul înclinat, șurubul (melcul lui Arhimede), capcanele iar mai târziu mașinile de
luptă (catapultele și balistele) sunt exemple de dispozitive în construcția și funcționarea cărora s-a ținut
cont de aceste noi cunoștințe, dobândite din observarea naturii.
Mecanica, numită mecanica clasică, sau mecanica newtoniană, a fost elaborată de Isaac Newton și
expusă în celebra sa carte „Principiile matematice ale filosofiei naturii” (1687), unde sunt formulate cele
trei legi sau principii ale mecanicii, precum și celebra lege a atracției universale, aplicabilă și mișcării
sistemului nostru solar.
Mecanica se împarte în trei capitole:
I. Cinematica este capitolul mecanicii care studiază mișcarea corpurilor fără a interesa natura acestora,
masa lor, cauzele și efectele mișcării; în cinematică se stabilesc expresii matematice care permit calculul
poziției, vitezei și accelerației corpurilor aflate în mișcare, în orice moment.
II. Dinamica este capitolul mecanicii care se studiază mișcarea corpurilor materiale (punctelor
materiale) prin prisma cauzelor fizice care produc sau schimbă mișcarea acestora. În dinamică se
stabilesc legile mișcării corpurilor pe baza interacțiunilor dintre ele.
III. Statica este capitolul mecanicii care studiază sistemele de forțe pentru stabilirea condițiilor de
echilibru mecanic ale unui corp aflat în stare de repaus sau de mișcare.
I. Cinematica (punctului material).
Noțiuni introductive.
Mișcarea reprezintă schimbarea poziției unui corp față de poziția altui corp, considerat fix și numit corp
de referință, sau reper.
Modificarea stării de mișcare va fi studiată doar pur descriptiv, fără a lua
în considerare cauzele care o determină. O astfel de abordare geometrică
a mișcării este cunoscută drept abordarea cinematică, iar capitolul
corespunzător din mecanică poartă numele de cinematică.
Un corp este considerat în repaus dacă poziția lui față de alte corpuri nu
se schimbă. Evident, nu există repaus absolut. Ori de câte ori considerăm
un corp în repaus față de un corp, vom găsi un alt corp față de care să
considerăm corpul respectiv în mișcare. Din acest motiv spunem că
repausul este un caz particular de mișcare.
Mișcarea este o proprietate intrinsecă a materiei, în sensul că nu există materie în repaus absolut, după
cum nu poate fi concepută mișcare fără suportul material.
1. Sistemul de referință este un ansamblu constituit dintr-un corp fix, ales arbitrar, numit corp de
referință, sau reper, căruia i se asociază un instrument pentru măsurarea timpului și un instrument pentru
măsurarea distanțelor.
Pentru studierea unui fenomen fizic trebuie, obligatoriu, precizat sistemul de referință la care ne
raportăm. Din punct de vedere matematic sistemul de referință se reprezintă ca un ansamblu rigid de
puncte din spațiu față de care se raportează poziția unui corp în mișcare și căruia i se atașează un sistem

2
de trei axe concurente numite axe de referință, sau axe de coordonate, formând sistemul de
coordonate. Punctul de concurență al celor trei axe se numește originea sistemului de coordonate, sau
reperul sistemului de referință, Fig. 1. Proiecțiile punctului P pe cele trei axe, Px, Py, și Pz, reprezintă
coordonatele matematice ale punctului P, în sistemul de axe de coordonate considerat.
Modelul punctului material.
Modelele zice și modelarea sunt instrumente esențiale, nu numai în zică, ci în întreg procesul
cunoașterii lumii înconjurătoare. O reprezentare implicată a unui sistem sau a unui proces fizic se
numește model fizic.
Recurgerea la modele simple este necesară în faza incipientă a cunoașterii naturii, inclusiv în școală.
Exemplele cele mai cunoscute sunt modelul atomului, al nucleului, modelul de fluid, modeleul
solidului cristalin, modelul solidului rigid, diferite modele de unde, etc.
Cel mai simplu model din mecanică este modelul punctului material. El poate fi folosit ori de câte
ori se studiază mișcarea de translație a unui obiect sau sistem de obiecte, de dimensiuni mult mai mici
decât distanțele parcurse. Un punct material este un corp ale cărui dimensiuni și rotații proprii nu ne
interesează, iar întreaga sa masă se consideră că este concentrată într-un singur punct. De regulă, acest
punct se alege chiar centrul de greutate al corpului.
Se înțelege că un corp nu trebuie să fie neapărat ”mic” în accepțiunea proprie a cuvântului, pentru a fi
tratat ca punct material.
Un punct material aflat în mișcare se numește mobil. Dacă punctul material se mișcă datorită unor forțe
proprii, forțe generate de el însuși, se numește automobil.
Modelul punctului material se aplică cu același succes, atât pentru studierea mișcării unor corpuri de
dimensiuni și mase gigantice (cum ar fi corpurile din interiorul sistemului solar), cât și unor corpuri de
dimensiuni nanoscopice (atomi, nuclee, electroni, etc.).
2. Traiectoria reprezintă drumul urmat de un mobil în spațiu. Traiectoria se reprezintă grafic printr-o
linie continuă, Fig. 1
Orice hartă geografică, de ex. harta României,
este un sistem de referință, în care cursurile de
apă, râurile, pâraiele, fluviile, căile ferate,
drumurile județene, naționale, autostrăzile sunt
traiectorii, reprezentate prin linii de diferite
culori și grosimi.
Axele de coordonate sunt reprezentate de o
succesiune de 180 de cercuri paralele (câte 90 în
fiecare emisferă), numite paralele și o altă
succesiune de 360 cercuri perpendiculare pe
acestea, 180 de la est la vest și încă 180 de la vest
la est, numite meridiane, Fig. 2. Meridianul de 00 al acestui sistem de coordonate a fost ales, prin
convenție meridianul care trece prin localitatea Greenwich, aflată la aprox. 8,9 km sud-est de capitala
Marii Britanii, Londra. Regiunea dintre două meridiane consecutive se numește fus orar și este
considerată regiunea de pe Pământ în care este, legal, în vigoare aceeași oră (același timp). Numărarea
orelor începe de la meridianul 00, cu – spre vest și cu + spre est. Acest sistem de stabilire a orelor a fost
numit sistem GMT, Greenwich Mean Time.
3. Coordonate geografice fac parte dintr-un sistem de referință care utilizează coordonatele
unghiulare, latitudine (nordică sau sudică) și longitudine (estică sau vestică) și servesc la determinarea
unui punct pe suprafața Pământului, sau la stabilirea unei traiectorii, între două puncte pe suprafața
Pământului.
Acest sistem de coordonate este utilizat astăzi în tehnologia GPS (Global Positioning System).
4. Legea de mișcare este o dependență, o funcție, a coordonatei spațiale de timp:
�⃗� = �⃗� (𝒕) (1)
sau, pe coordonate: (1’)
{
�⃗⃗� = �⃗⃗� (𝒕)
�⃗⃗� = �⃗⃗� (𝒕)
�⃗� = �⃗� (𝒕)

3
5. Vector de poziție, vector deplasare.
Vectorul de poziție este un vector care ne arată poziția unui corp în spațiu, față de un anumit sistem
de referință. Considerăm o traiectorie în plan, Fig. 3, sistemul de
referință este sistemul xOy.
Vectorii: �⃗� 𝟏 = 𝑶𝑨⃗⃗⃗⃗⃗⃗ și �⃗� 𝟐 = 𝑶𝑩⃗⃗⃗⃗ ⃗⃗ sunt vectori de poziție.
Vectorul deplasare este un vector care ne arată de unde până unde
s-a deplasat corpul pe traiectorie,
De exemplu: la momentul t1
corpul se află în punctul A și
suferă o deplasare până în punctul
B și momentul t2. Vectorul 𝑨𝑩⃗⃗⃗⃗⃗⃗ =∆�⃗� = �⃗� 𝟐 − �⃗� 𝟏 este vectorul deplasare.
6. Deplasarea este porțiunea de drum parcursă de corp pe traiectorie,
arcul AB, Fig. 3. Observați că vectorul deplasare, 𝑨𝑩⃗⃗⃗⃗⃗⃗ , este diferit de deplasarea AB.
În cazul mișcării unidirecționale, Fig. 4, deplasarea coincide cu vectorul deplasare.
7. Viteza. Vectorul viteză.
Am zis mai devreme că toate corpurile se mișcă și că mișcarea este o proprietate intrinsecă a materiei.
Dar nu toate corpurile se mișcă la fel. Unele se mișcă mai repede, altele se mișcă mai încet. Pentru a
distinge între diferitele mișcări ale corpurilor introducem noțiunea de viteză, notată cu litera v.
Viteza este mărimea fizică atașată proprietății corpurilor de a fi în mișcare. O să observați că ori de câte
ori identificăm o proprietate a corpurilor vom defini o mărime fizică.
Viteza este mărimea fizică egală cu raportul dintre spațiu și timp:
(2)
Unitatea de măsură pentru viteză este m/s.
Pentru mișcarea unidirecțională, Fig. 4, viteza se calculează:
(2’)
Viteza medie, notat vm, – este viteza calculată global, pe toată durata mișcării. De exemplu, distanța
Slatina-Pitești este Δx = 75 km. Un automobil parcurge această distanță în timpul Δt = 1h și 30min.
Conform definiției (2’) viteza are valoarea v = 50 km/h. Dar oricine știe că nici un automobilist nu se
poate mișca cu o viteză constantă pe o distanță așa mare. El ar fi putut să aibă orice viteză v, cu valorile
𝑣 = 0 ÷ 90𝑘𝑚ℎ. Dar, global vorbind, el s-a mișcat ca și cum ar fi avut viteza de 50 km/h.
Vectorul viteză medie are direcția și sensul vectorului deplasare, Fig. 3.
Viteza momentană, notată v, – este viteza calculată pe un interval de timp foarte scurt, spunem ∆𝑡 →0. De exemplu, un automobilist merge cu viteza legală 50 km/h prin localitate, dar are nefericita
inspirație să accelereze…pentru a face o depășire la fel de neinspirată. În acest moment a ieșit în fața
radarului. Viteza pe care o înregistrează poliția cu radarul este viteza momentană.
Observați că viteza momentană și viteza medie se definesc și se calculează la fel, diferă doar intervalul
de timp!
Vectorul viteză momentană este un vector tangent la traiectorie în orice punct,
Fig. 3. Vectorii 𝑣 𝐴 , 𝑣 𝐵, respectiv 𝑣 sunt vectori viteză momentană.
Referitor la această afirmație se cade să facem o precizare. De fapt, și vectorul
viteză momentană are tot direcția și sensul vectorului deplasare. Dar pentru
deplasări…infinit mici, infinitezimale, vectorul deplasare se poate aproxima cu
deplasarea, ceea ce face ca el să pară tangent la traiectorie, ca și în cazul
mișcării unidirecționale, Fig. 5.
Ați observat, deja, că în cazul mișcării unidirecționale vectorul viteză momentană are aceeași direcție și
sens cu vectorul viteză medie, în orice punct, Fig. 4.
𝒗 =𝐬𝐩𝐚ț𝐢𝐮
𝐭𝐢𝐦𝐩=∆𝒓
∆𝒕
𝒗 =∆𝒙
∆𝒕

4
8. Accelerația. Vectorul accelerație.
O altă proprietate a corpurilor este că își pot modifica viteza, pot accelera, în intervale de timp diferite.
În tabelul alăturat sunt prezentați timpii Tabelul 1
de accelerare de la 0 la 100 km/h
pentru câteva mărci de automobile.
Accelerația este mărimea fizică
atașată proprietății corpurilor de a își
modifica viteza în intervale de timp
diferite.
Accelerația, notată a, este mărimea
fizică egală cu raportul dintre variația
vitezei și timp:
(3)
Unitatea de măsură pentru accelerație este m/s2.
Accelerația medie, notată am – caracterizează global variația vitezei, pe toată durata mișcării.
(4)
Observași că se calculează ca variația vectorului viteză momentană, dar pe un interval mare de timp.
Vectorul accelerație medie, notat �⃗⃗� 𝒎, și are direcția și sensul spre centrul de curbură al traiectoriei.
Accelerația momentană, notată a – este accelerația calculată pe un interval de timp scurt, ∆𝑡 → 0.
Vectorul accelerație momentană, notată �⃗⃗� :
(5)
Pentru a reprezenta vectorul �⃗⃗� vom face apel la câteva noțiuni de
calcul vectorial, Fig. 6.
Vectorul �⃗⃗� are direcția și sensul vectorului ∆�⃗� . După cum se poate
vedea în Fig. 6, vectorul accelerație momentană este orientat spre
interiorul traiectoriei, spre centrul de curbură al porțiunii de
traiectorie.
În încheiere se cade să mai facem o precizare: accelerația se definește ca VARIAȚIA VITEZEI
SUPRA TIMP. Deci, dacă nu există variație a vitezei, v = const., nu există accelerație, a = 0.
9. Clasificarea mișcărilor punctului material.
Clasificarea mișcărilor punctului material se face în funcție de două criterii:
1. forma traiectoriei, care poate fi:
- rectilinie sau curbilinie.
2. dependența modulului vitezei de timp:
- mișcare uniformă, |�⃗� | = 𝐯 = 𝒄𝒐𝒏𝒔𝒕., modulul vitezei nu depinde de timp, are aceeași valoare în orice
moment al timpului, a = 0.
- mișcare uniform variată, 𝒂 = 𝒄𝒐𝒏𝒔𝒕.≠ 𝟎.
- mișcare variată, a = a(t), accelerația depinde de timp după o anumită lege.
9.1 Compunerea mișcărilor.
Teoremă. Dacă un corp participă simultan la mai multe
mișcări deplasările și vitezele se compun după regula de
compunere a vectorilor.
De exemplu, un om dorește să traverseze un râu, Fig. 7.
Viteza de curgere a râului este �⃗� 𝐚, iar viteza pe care o
imprimă bărcii este �⃗� 𝐛. Cele două viteze se vor compune,
conform regulii de compunere a vectorilor și vor da o
rezultantă �⃗� = �⃗� 𝐚 + �⃗� 𝐛. Deși barcagiul vâslește spre
Tipul de automobil
Timpul de accelerare de la 0 – 100 km/h.
Bugatti Vezron 16.4 Grand Sport Vitese 2,6 s
Porsche 9FF GT9R 3,0 s
Mercedes SL Class 65 AMG V12 4,0 s
Ferrari 512 M 5,0 s
Renault Megane Sport 2.0T 265 6,1 s
Skoda Octavia RS TDI 8,2 s
�⃗⃗� 𝒎 =∆�⃗�
∆𝒕
�⃗⃗� =∆�⃗�
∆𝒕
𝒂 =𝐯𝐚𝐫𝐢𝐚ț𝐢𝐚 𝐯𝐢𝐭𝐞𝐳𝐞𝐢
𝐭𝐢𝐦𝐩=∆𝐯
∆𝒕

5
localitatea B, barca se va mișca după direcția vitezei rezultante, �⃗� și va ajunge în localitatea C, Fig. 7 a).
Dacă barcagiul dorește să ajungă, totuși, în localitatea B va trebui să orienteze viteza bărcii �⃗� 𝐛 astfel
încât, prin compunerea cu viteza apei �⃗� 𝐚 să dea o rezultantă orientată spre localitatea B, Fig. 7 b).
Observați că și deplasările se supun aceleiași reguli: 𝑨𝑪⃗⃗⃗⃗ ⃗ = 𝑨𝑩⃗⃗⃗⃗⃗⃗ + 𝑩𝑪⃗⃗⃗⃗⃗⃗ .
10. Mișcarea rectilinie a punctului material.
10.1 Mișcarea rectilinie și uniformă.
Traiectoria este o linie dreaptă, iar viteza este constantă, Fig.8,
�⃗� = 𝒄𝒐𝒏𝒔𝒕. (6)
Rel.(6) reprezintă legea vitezei, pentru mișcarea rectilinie și uniformă.
Observați că viteza este constantă ca vector, atât în modul cât și direcție și sens. Conform definiției
(2’): 𝐱 − 𝐱𝟎 = 𝐯 ∙ (𝐭 − 𝐭𝟎) (7)
sau, 𝐱 = 𝐱𝟎 + 𝐯 ∙ (𝐭 − 𝐭𝟎) (7’)
Dacă considerăm că la momentul inițial t0 = 0, rel.(7) devine:
𝐱 − 𝐱𝟎 = 𝐯 ∙ 𝐭 (7”)
Rel.(7), (7’) și (7”) exprimă legea mișcării rectilinii și uniforme.
10.2 Mișcarea rectilinie uniform variată.
Traiectoria este o linie dreaptă, iar viteza variază constant în timp, sau altfel spus: crește sau scade cu
valori egale în intervale de timp egale, 𝒂 = 𝒄𝒐𝒏𝒔𝒕.≠ 𝟎, Fig. 9.
REȚINEȚI!
Dacă viteza crește în timp, accelerația este pozitivă, 𝒂 > 𝟎, iar mișcarea se
numește accelerată, iar dacă viteza scade în timp, accelerația este negativă,
𝒂 < 𝟎, iar mișcarea se numește încetinită, sau frânată.
Conform rel.(3): 𝐯 − 𝐯𝟎 = 𝐚 ∙ (𝐭 − 𝐭𝟎) (8)
sau: 𝐯 = 𝐯𝟎 + 𝐚 ∙ (𝐭 − 𝐭𝟎) (8’)
Dacă considerăm că la momentul inițial t0 = 0, rel.(8) devine:
𝐯 = 𝐯𝟎 + 𝐚 ∙ 𝐭 (8”)
Rel. (8), (8’) și (8”) reprezintă legea vitezei pentru mișcarea rectilinie și uniform variată, cu
observația de mai sus: +𝑎 dacă mișcarea este accelerată și −𝑎 dacă mișcarea este încetinită.
Pentru a găsi legea spațiului, sau legea de mișcare, revenim la rel.(7”) cu precizarea că acum, deoarece
viteza nu mai este constantă, viteza va fi o viteză medie, vm,
𝐱 − 𝐱𝟎 = 𝐯𝒎 ∙ 𝐭 (9)
iar viteza medie o vom calcula ca o medie geometrică între valoarea inițială a vitezei, v0 și valoarea
finală a vitezei, v. Deci:
Ținând cont de rel.(8”), rel.(10) devine:
Dacă în rel.(9) înlocuim vm valoarea dată de rel. (10’) obținem:
Rel.(11) exprimă legea mișcării rectilinii și uniform variate, cu aceeași precizare ca și pentru legea
vitezei: +𝑎 dacă mișcarea este accelerată și −𝑎 dacă mișcarea este încetinită.
10.2.1 Ecuația lui Galilei.
Între rel.(8”) și rel.(11) vom elimina timpul. Această acțiune presupune o serie de operații matematice
simple. Din rel.(8”):
(12)
și:
(
𝒙 − 𝒙𝟎 = 𝐯𝟎 ∙
𝐯 − 𝐯𝟎𝒂
+𝒂
𝟐∙(𝐯 − 𝐯𝟎)
𝟐
𝒂𝟐
𝐯𝐦 =𝐯+ 𝐯𝟎𝟐
(10)
𝒙 − 𝒙𝟎 = 𝐯𝟎 ∙ 𝒕 +𝒂 ∙ 𝒕𝟐
𝟐 (11)
(10’)
𝒕 =𝐯 − 𝐯𝟎𝒂
𝐯𝐦 =𝟐𝐯𝟎 + 𝒂 ∙ 𝒕
𝟐
(13)

6
Dacă efectuăm calculele algebrice vom obține ecuația lui Galilei:
𝐯𝟐 = 𝐯𝟎𝟐 + 𝟐𝒂(𝒙 − 𝒙𝟎) (14)
Evident, cu +𝒂 dacă mișcarea este accelerată și −𝒂 dacă mișcarea este încetinită.
10.3 Mișcarea circulară uniformă.
Traiectoria este un cerc sau un arc de cerc, iar modulul vectorului viteză este constant, |�⃗� | = 𝒄𝒐𝒏𝒔𝒕., Fig. 9. Observați că traiectoria se află într-un plan.
- O este centrul de curbură al traiectoriei;
- 𝒓 = |�⃗� | este raza traiectoriei;
- 𝑶𝑨⃗⃗⃗⃗⃗⃗ = 𝑶𝑩⃗⃗⃗⃗ ⃗⃗ = �⃗� sunt vectori de poziție. �⃗� se mai numește și
rază vectoare;
- θ0 este unghiul inițial la centru, iar θ unghiul final;
- ∆𝜽 = 𝜽 − 𝜽𝟎 este variația unghiului la centru.
În timpul mișcării raza vectoare mătură aria cercului, viteza
rămânând tot timpul tangentă la traiectorie, Fig. 10.
Mișcarea circulară uniformă este o mișcare periodică, ea repetându-
se identic după parcurgerea întregului cerc, la intervale de timp egale.
Caracteristicile mișcării circulare uniforme:
1. Perioada mișcării circulare reprezintă timpul în care corpul efectuează o rotație completă. Se
notează cu T și se măsoară, pentru că este un timp, în secunde:
[𝑻]𝑺𝑰 = 𝟏𝒔.
2. Frecvența mișcării circulare uniforme reprezintă numărul de rotații complete efectuate de corp
în timp de o secundă. Se notează cu ν și se măsoară în rotații/secundă, sau secundă-1:
[𝝂]𝑺𝑰 = 𝟏𝒓𝒐𝒕./𝒔 = 𝟏𝒔−𝟏 = 𝟏𝑯𝒛 (Hertz)
3. Turația mișcării circulare uniforme reprezintă numărul de rotații complete efectuate de corp în
timp un minut. Se notează cu n și se măsoară în rotații/minut, sau minut-1:
[𝒏]𝑺𝑰 = 𝟏𝒓𝒐𝒕./𝒎𝒊𝒏 = 𝟏𝒎𝒊𝒏.−𝟏
Observați egalitatea: 𝒏 = 𝟔𝟎𝝂, adică turația este de 60 ori frecvența!
Legea de mișcare.
Din Fig. 10, conform rel.(2):
Unde am notat AB arcul de cerc AB, Fig. 10.
Dacă unghiul Δθ este măsurat în radiani, Fig. 10, atunci:
Astfel:
iar rel.(15) devine:
Notăm:
numită viteză unghiulară. Unitatea de măsură pentru ω este, [𝝎]𝑺𝑰 = 𝟏𝒓𝒂𝒅/𝒔. În mișcarea circulară uniformă ω este constant, ω = const.
În continuare, conform rel.(17), putem nota:
𝐯 = 𝝎 ∙ 𝒓 (19)
Rel.(18) ne permite să stabilim o legătură între viteza tangențială v și viteza unghiulară ω.
Cele mai uzuale unități de măsură pentru unghiul plan sunt: Gradul sexagesimal, notat º. 1º reprezintă mărimea unui unghi plan, la centru, care subîntinde un arc egal cu a 360-a parte din lungimea cercului. Gradul sexagesimal se mai definește și ca a 90-a parte din valoarea unui unghi drept. Gradul radian, sau radianul, notat rad. 1rad reprezintă mărimea unui unghi plan, la centru, care subîntinde un arc egal cu raza cercului. Teoremă. Dacă unghiul la centru este măsurat în radiani, atunci, arcul care-l subîntinde este egal cu produsul dintre rază și unghi.
𝐯 =𝑨𝑩
𝜟𝒕
𝐯 =𝒓 ∙ 𝜟𝜽
𝜟𝒕
𝑨𝑩 = 𝒓 ∙ 𝜟𝜽
(17)
(16)
(15)
(18) 𝝎 =𝜟𝜽
𝜟𝒕

7
Aici trebuie să facem o precizare: viteza este o mărime vectorială (acest
lucru l-am stabilit deja!), deci produsul 𝝎 ∙ 𝒓 trebuie să fie un produs
vectorial!
Astfel, rel.(19) se poate secrie vectorial:
�⃗� = �⃗⃗⃗� ×�⃗� (20)
Din rel.(20), conform definiției produsului vectorial, rezultă că cei trei
vectori: 𝐯,⃗⃗ 𝝎,⃗⃗⃗⃗ ș𝒊 �⃗� sunt vectori perpendiculari, fiecare pe planul format de ceilalți doi. De exemplu,
vectorul viteză unghiulară, �⃗⃗⃗� , este perpendicular pe planul vectorilor �⃗� ș𝒊 �⃗� , Fig. 11.
*) Vezi și Noțiuni de calcul vectorial.
Conform rel.(7”), pentru mișcarea uniformă:
𝒍 = 𝟐𝝅𝒓 = 𝐯 ∙ 𝑻 = 𝝎 ∙ 𝒓 ∙ 𝑻 (21)
sau, (22)
Accelerația centripetă
În mișcarea circulară uniformă modulul vectorului viteză este constant, |�⃗� | = 𝐯 = 𝒄𝒐𝒏𝒔𝒕. Totuși,
direcția și sensul vectorului viteză variază, se modifică în orice moment, Fig. 12. Acest lucru presupune
că, deși variația modulului vectorului viteză este nulă, ∆v = 0, variația
vectorului viteză este diferită de zero, ∆v⃗ ≠ 0, Fig. 12.
Această variație a vitezei va da naștere unei accelerații: conform
rel.(5).
Calculul variației vectorului viteză ∆�⃗� îl vom face numai din considerente
geometrice, urmărind Fig. 12.
Observați că am translatat vectorul �⃗� 𝑩 în punctul A, pentru a fi concurent cu
vectorul �⃗� 𝑨, pentru a efectua diferența vectorială ∆�⃗� = �⃗� 𝑩 − �⃗� 𝑨.
Din considerente geometrice deducem următoarele:
1. < 𝑨𝑶𝑩 =< 𝑨′𝑨𝑩′; prin construcție sunt unghiuri cu laturile perpendiculare.
2. △ 𝑨𝑶𝑩 =△ 𝑨′𝑨𝑩′; sunt triunghiuri isoscele și au unghiurile de le vârf egale.
Pentru cele două triunghiuri să scriem regula de asemănare a laturilor:
Urmărind Fig. 12 observăm următoarele identități:
𝑶𝑨 = 𝒓, 𝑨𝑨′ = 𝐯𝑨 = 𝐯, 𝑨′𝑩′ = ∆𝐯 (24)
În ce privește coarda AB, putem face aproximația că, pentru intervale de timp mici coarda AB este
aproximativ egală cu arcul AB, și dacă ținem cont și de rel.(16) putem face notația:
Ținând cont de rel.(24) și (25) rel.(23) se va scrie: (26)
Din această relație rezultă ∆𝐯 = 𝐯 ∙ ∆𝛉. Conform rel.(5):
(27)
Vectorial, rel.(27) se scrie: �⃗⃗� 𝒏 = −𝝎𝟐 ∙ �⃗� (27’)
Observați că vectorul accelerație centripetă este orientat spre centrul traiectoriei, pe direcția razei
traiectoriei circulare, dar în sens invers acesteia. Din această cauză se numește accelerație centripetă.
Accelerația centripetă se mai numește accelerație normală, pentru că este normală pe viteză. (Într-un
cerc orice tangentă la acel cerc este perpendiculară pe raza cercului.)
Deci, pentru ca un corp să execute o mișcare circulară este necesar să i se imprime o accelerație
constantă în modul și orientată radial spre centrul cercului.
𝒂𝒏 =𝐯 ∙ ∆𝜽
∆𝒕= 𝐯 ∙ 𝝎 = 𝝎𝟐 ∙ 𝒓
𝒓
𝐯=𝒓∆𝜽
∆𝐯
𝝎 =𝟐𝝅
𝑻= 𝟐𝝅𝛎
�⃗⃗� =∆�⃗�
∆𝒕
𝑶𝑨
𝑨𝑨′=𝑨𝑩
𝑨′𝑩′ (23)
𝑨𝑩̅̅ ̅̅ ≅ 𝑨𝑩 = 𝒓 ∙ 𝜟𝜽
(25)
8
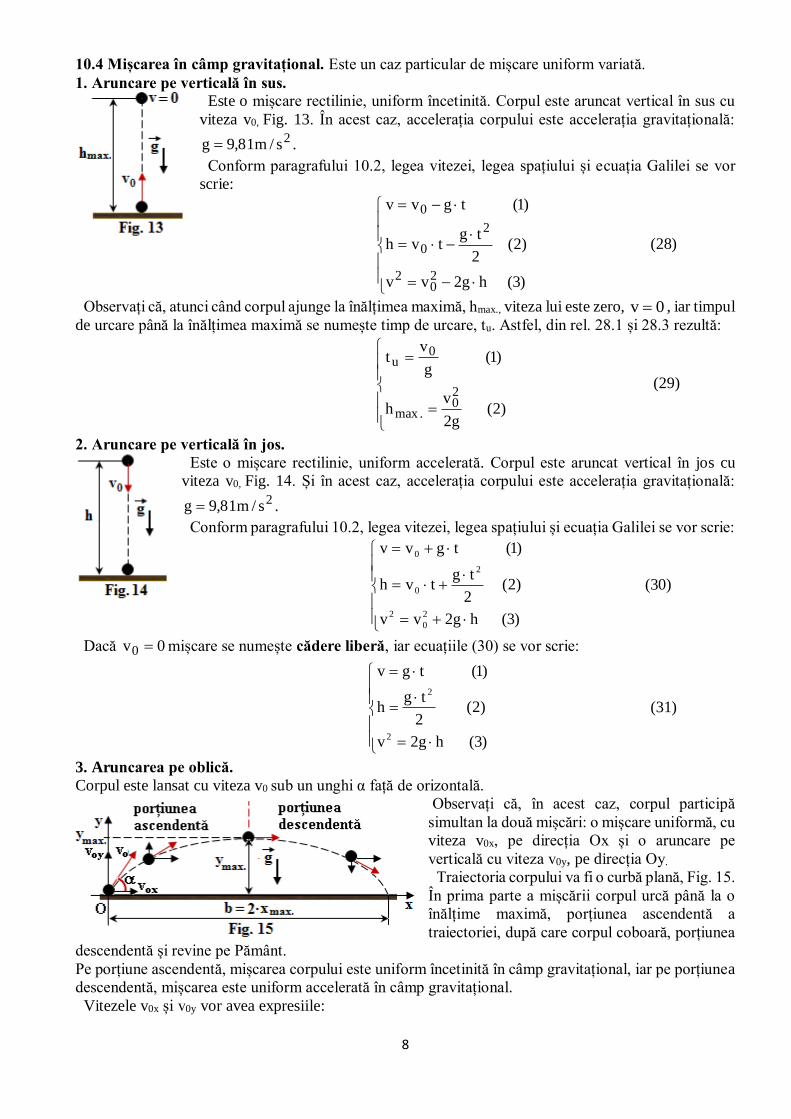
10.4 Mișcarea în câmp gravitațional. Este un caz particular de mișcare uniform variată.
1. Aruncare pe verticală în sus.
Este o mișcare rectilinie, uniform încetinită. Corpul este aruncat vertical în sus cu
viteza v0, Fig. 13. În acest caz, accelerația corpului este accelerația gravitațională: 2s/m81,9g .
Conform paragrafului 10.2, legea vitezei, legea spațiului și ecuația Galilei se vor
scrie:
)3(hg2vv
)2(2
tgtvh
)1(tgvv
20
2
2
0
0
(28)
Observați că, atunci când corpul ajunge la înălțimea maximă, hmax., viteza lui este zero, 0v , iar timpul
de urcare până la înălțimea maximă se numește timp de urcare, tu. Astfel, din rel. 28.1 și 28.3 rezultă:
)2(g2
vh
)1(g
vt
20
.max
0u
(29)
2. Aruncare pe verticală în jos.
Este o mișcare rectilinie, uniform accelerată. Corpul este aruncat vertical în jos cu
viteza v0, Fig. 14. Și în acest caz, accelerația corpului este accelerația gravitațională: 2s/m81,9g .
Conform paragrafului 10.2, legea vitezei, legea spațiului și ecuația Galilei se vor scrie:
)3(hg2vv
)2(2
tgtvh
)1(tgvv
2
0
2
2
0
0
(30)
Dacă 0v0 mișcare se numește cădere liberă, iar ecuațiile (30) se vor scrie:
)3(hg2v
)2(2
tgh
)1(tgv
2
2
(31)
3. Aruncarea pe oblică.
Corpul este lansat cu viteza v0 sub un unghi α față de orizontală.
Observați că, în acest caz, corpul participă
simultan la două mișcări: o mișcare uniformă, cu
viteza v0x, pe direcția Ox și o aruncare pe
verticală cu viteza v0y, pe direcția Oy.
Traiectoria corpului va fi o curbă plană, Fig. 15.
În prima parte a mișcării corpul urcă până la o
înălțime maximă, porțiunea ascendentă a
traiectoriei, după care corpul coboară, porțiunea
descendentă și revine pe Pământ.
Pe porțiune ascendentă, mișcarea corpului este uniform încetinită în câmp gravitațional, iar pe porțiunea
descendentă, mișcarea este uniform accelerată în câmp gravitațional.
Vitezele v0x și v0y vor avea expresiile:

9
sinvv
cosvv
0y0
0x0 (32)
Cu aceste notații, vom scrie, pentru prima porțiune a traiectoriei, legile de mișcare:
legea vitezei
)2(tgvv
)1(.constvv
y0y
x0x (33)
legea spațiului
)2(2
tgtvy
)1(tvx
2
y0
x0
(34)
DISCUȚIE. Dacă .maxyy , utt iar 0v y și astfel,
din rel. (33.2) rezultă timpul de urcare: g
sinv
g
vt 0y0
u
(35)
din rel. (34.1) rezultă xmax.:
g2
2sinv
g
sinvcosvtvx
2
00
0ux0.max
(36)
iar din rel. (34.2) rezultă ymax.:
g2
sinv
g
sinv
2
g
g
sinvsinvhy
22
0
2
00
0.max.max
(37)
Din Fig. 15 se observă că dublul distanței maxime se numește bătaie, notată b:
g
2sinvx2b
2
0
.max
(38)
Din rel. (38) se observă că bătaia este maximă atunci când corpul este lansat sub un unghi 045 .
Dacă între cele două (34), lege spațiului, eliminăm timpul, vom obține ecuația traiectoriei:
2
2
x0x0
y0x
v2
gx
v
vy
(39)
Observați că este ecuația unei parabole!
4. Aruncarea pe orizontală.
Corpul este aruncat de la înălțimea h0, paralel cu direcția orizontală, Fig. 16. Observați că, în acest caz,
corpul participă simultan la două mișcări: o mișcare uniformă, cu
viteza v0, pe direcția Ox și o mișcare cădere liberă pe verticală, pe
direcția Oy. Legile de mișcare se vor scrie:
Legea vitezei:
)2(tgv
)1(.constvv
y
0x (40)
Legea spațiului:
)2(2
tghhy
)1(tvx
2
0
0
(41)
ACTIVITĂŢI DE FIXARE A CUNOŞTINŢELOR ŞI EVALUARE.
Probleme rezolvate și comentate:
1. Viteza unui biciclist este v1 = 14,4 km/h, iar viteza
vântului care-i suflă din față este v2 = 4 m/s.
a) Care este viteza biciclistului față de pământ?
b) Dar dacă vântul îi suflă din spate?
Rezolvare:
În primul rând va trebui să transformăm toate
mărimile fizice în același sistem de unități, în cazul
nostru viteza. Astfel: v1 = 14,4𝑘𝑚/ℎ = 4𝑚/𝑠. Reprezentăm grafic cele două situații, Fig. 17, a) și b).
10
Din desen rezultă și viteza biciclistului față de Pământ în cele două situații: a) 𝐯 = 𝟎 𝒎/𝒔 și b) 𝐯 =𝐯𝟏 + 𝐯𝟐 = 𝟖 𝒎/𝒔
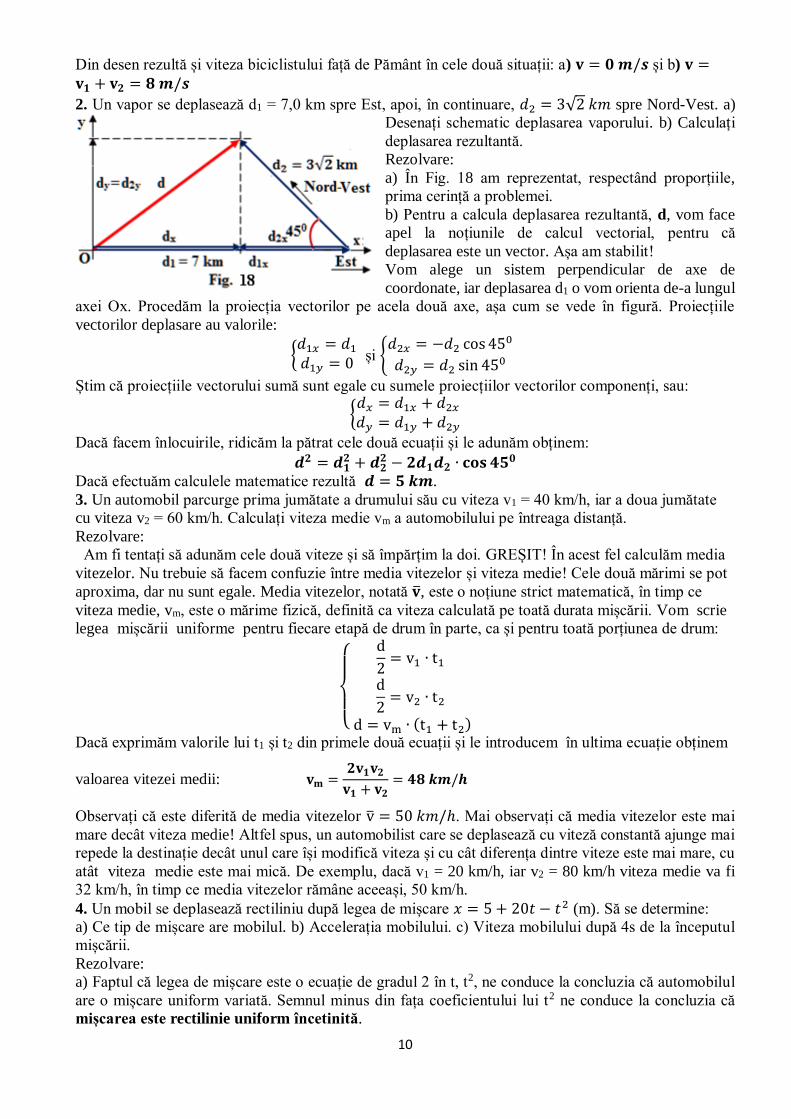
2. Un vapor se deplasează d1 = 7,0 km spre Est, apoi, în continuare, 𝑑2 = 3√2 𝑘𝑚 spre Nord-Vest. a)
Desenați schematic deplasarea vaporului. b) Calculați
deplasarea rezultantă.
Rezolvare:
a) În Fig. 18 am reprezentat, respectând proporțiile,
prima cerință a problemei.
b) Pentru a calcula deplasarea rezultantă, d, vom face
apel la noțiunile de calcul vectorial, pentru că
deplasarea este un vector. Așa am stabilit!
Vom alege un sistem perpendicular de axe de
coordonate, iar deplasarea d1 o vom orienta de-a lungul
axei Ox. Procedăm la proiecția vectorilor pe acela două axe, așa cum se vede în figură. Proiecțiile
vectorilor deplasare au valorile:
{𝑑1𝑥 = 𝑑1𝑑1𝑦 = 0
și {𝑑2𝑥 = −𝑑2 cos45
0
𝑑2𝑦 = 𝑑2 sin 450
Știm că proiecțiile vectorului sumă sunt egale cu sumele proiecțiilor vectorilor componenți, sau:
{𝑑𝑥 = 𝑑1𝑥 + 𝑑2𝑥𝑑𝑦 = 𝑑1𝑦 + 𝑑2𝑦
Dacă facem înlocuirile, ridicăm la pătrat cele două ecuații și le adunăm obținem:
𝒅𝟐 = 𝒅𝟏𝟐 + 𝒅𝟐
𝟐 − 𝟐𝒅𝟏𝒅𝟐 ∙ 𝐜𝐨𝐬 𝟒𝟓𝟎
Dacă efectuăm calculele matematice rezultă 𝒅 = 𝟓 𝒌𝒎.
3. Un automobil parcurge prima jumătate a drumului său cu viteza v1 = 40 km/h, iar a doua jumătate
cu viteza v2 = 60 km/h. Calculați viteza medie vm a automobilului pe întreaga distanță.
Rezolvare:
Am fi tentați să adunăm cele două viteze și să împărțim la doi. GREȘIT! În acest fel calculăm media
vitezelor. Nu trebuie să facem confuzie între media vitezelor și viteza medie! Cele două mărimi se pot
aproxima, dar nu sunt egale. Media vitezelor, notată �̅�, este o noțiune strict matematică, în timp ce
viteza medie, vm, este o mărime fizică, definită ca viteza calculată pe toată durata mișcării. Vom scrie
legea mișcării uniforme pentru fiecare etapă de drum în parte, ca și pentru toată porțiunea de drum:
{
d
2= v1 ∙ t1
d
2= v2 ∙ t2
d = vm ∙ (t1 + t2)
Dacă exprimăm valorile lui t1 și t2 din primele două ecuații și le introducem în ultima ecuație obținem
valoarea vitezei medii:
Observați că este diferită de media vitezelor v̅ = 50 𝑘𝑚/ℎ. Mai observați că media vitezelor este mai
mare decât viteza medie! Altfel spus, un automobilist care se deplasează cu viteză constantă ajunge mai
repede la destinație decât unul care își modifică viteza și cu cât diferența dintre viteze este mai mare, cu
atât viteza medie este mai mică. De exemplu, dacă v1 = 20 km/h, iar v2 = 80 km/h viteza medie va fi
32 km/h, în timp ce media vitezelor rămâne aceeași, 50 km/h.
4. Un mobil se deplasează rectiliniu după legea de mișcare 𝑥 = 5 + 20𝑡 − 𝑡2 (m). Să se determine:
a) Ce tip de mișcare are mobilul. b) Accelerația mobilului. c) Viteza mobilului după 4s de la începutul
mișcării.
Rezolvare:
a) Faptul că legea de mișcare este o ecuație de gradul 2 în t, t2, ne conduce la concluzia că automobilul
are o mișcare uniform variată. Semnul minus din fața coeficientului lui t2 ne conduce la concluzia că
mișcarea este rectilinie uniform încetinită.
𝐯𝐦 =𝟐𝐯𝟏𝐯𝟐𝐯𝟏 + 𝐯𝟐
= 𝟒𝟖 𝒌𝒎/𝒉

11
b) Să comparăm și să identificăm între legea de mișcare a mobilului cu definiția legii de mișcare pentru
mișcarea uniform variată, rel.(11):
𝑥 = 5 + 20𝑡 − 𝑡2
Prin comparația celor două ecuații: x0 = 5 m, v0 = 20 m/s, a = − 2 m/s2.
c) Conform rel.(8’’) 𝐯 = 𝟐𝟎 − 𝟐 ∙ 𝒕 și v = 12 m/s.
5. Calculați viteza unghiulară și viteza periferică de rotație a Pământului în jurul propriei sale axe.
Se cunosc raza Pământului RP = 6400 km și perioada de rotație a Pământului în jurul propriei sale axe
T = 24 h.
Rezolvare:
a) Viteza unghiulară este exprimată prin rel.(22):
Această valoare, mai mult ca sigur, nu ne spune mare lucru despre performanța rotației Pământului în
jurul propriei axe.
b) Viteza periferică de rotație a Pământului în jurul propriei sale axe este, de fapt, viteza tangențială a
unui punct de pe suprafața Pământului. Valoarea acestei viteze este dată de rel.(19), scrisă:
𝐯 = 𝝎 ∙ 𝑹𝑷= 465 m/s = 1674 km/h. Această valoare este deosebit de spectaculoasă, dacă vă gândiți că
valoare vitezei sunetului în aer este de aprox. 340 m/s.
Răspundeți următorilor itemi: 1. Ce este mecanica?
2. Ce studiază cinematica?
3. Definiți mișcarea.
4. Ce este repausul?
5. Ce este un sistem de referință?
6. Ce este un punct material?
7. Ce este un mobil? Dar un automobil?
8. Definiți traiectoria. Dați exemple.
9. Definiți legea de mișcare. Dați exemple.
10. Ce este vectorul de poziție? Reprezentați grafic.
11. Ce este vectorul deplasare? Reprezentați grafic.
12. Definiți mărimea fizică viteza, precizându-i simbolul și unitatea de măsură.
13. Care este deosebirea dintre viteza medie și media vitezelor?
14. Definiți mărimea fizică accelerația, precizându-i simbolul și unitatea de măsură.
15. Care sunt criteriile în funcție de care se face clasificarea mișcărilor punctului material?
16. Definiți caracteristicile mișcării circulare uniforme?
17. Cum este definit radianul, unitate de măsură pentru unghi?
18. Definiți mărimea fizică viteza unghiulară, precizându-i simbolul și unitatea de măsură.
19. Accelerația centripetă – definiție, simbol, formulă, unitate de măsură.
20. Explicați, în 3-4 propoziții, de ce în mișcarea circulară uniformă apare, totuși, o accelerație,
accelerația centripetă.
21. Care este condiția ca mișcarea în câmp gravitațional să se numească cădere liberă?
22. Justificați afirmația: bătaia este maximă atunci când corpul este lansat sub un unghi 045 .
Rezolvați următoarele probleme:
1. O barcă cu motor parcurge distanța d = 9,0 km dintre două porturi în timpul t = 0,5 h, dacă se
deplasează împotriva sensului de curgere al râului. În cât timp va parcurge barca aceeași distanță înapoi,
dacă viteza de curgere a râului este v = 6 km/h?
𝑥 = 𝑥0 + v0 ∙ 𝑡 +𝑎 ∙ 𝑡2
2
𝝎 =𝟐𝝅
𝑻=
𝟐 ∙ 𝟑, 𝟏𝟒
𝟐𝟒 ∙ 𝟑𝟔𝟎𝟎= 𝟕, 𝟐𝟕 ∙ 𝟏𝟎−𝟓𝒓𝒂𝒅/𝒔
𝑅: 𝑡′ = 𝑡 ∙𝑑
𝑑 + 2v ∙ 𝑡= 0,3 ℎ = 18 𝑚𝑖𝑛.

12
𝑅: 𝑎) 𝑡 =v2 ∙ 𝑡0 − 𝑠0v2 − v1
= 3 ℎ; 𝑏) 𝑥 = v1 ∙ 𝑡 = 150 𝑘𝑚
2. Un barcagiu vâslește perpendicular către țărm cu viteza v0 = 7,2 km/h față de apă. Cursul apei
deplasează barca cu distanța d = 150 m în josul râului. Lățimea râului este L = 500 m. Calculați: a) viteza
râului; b) durata traversării râului.
3. Din două localități A și B pleacă simultan unul spre celălalt câte un tren cu vitezele constante
v1 = 60 km/h, respectiv v2 = 40 km/h. În același moment, de pe o locomotivă, se sperie și își ia zborul
un bondar, care continuă să zboare neîntrerupt, între cele două trenuri, de la unul la celălalt, cu viteza
constantă v = 70 km/h, până când trenurile se întâlnesc. Ce drum total străbate bondarul? (Distanța dintre
A și B este d = 60 km.) Problema este celebră și este cunoscută ca problema bondarului. Este interesant
de remarcat faptul că atât trenurile cât și bondarul se mișcă cu viteze diferite, dar în același t imp.
4. Pe șoseaua București-Brașov, pleacă din București spre Brașov un camion cu viteza v1 = 50 km/h.
Din Ploiești, aflat la distanța s0 = 6 km de București, pleacă un alt camion cu viteza v2 = 60 km/h, tot
spre Brașov, după timpul t0 = 1,5 h de la plecarea primului camion. După cât timp și în ce loc se vor
întâlni camioanele? (Indicație: Reprezentați grafic pe aceeași diagramă coordonatele celor două
camioane. De asemenea, trebuie să țineți cont de faptul că, în cazul problemelor de întâlnire,
coordonatele spațială și temporală ale corpurilor trebuie să coincidă.)
(Timpul și distanța au fost calculate față de București.)
5. O particulă se deplasează de-a lungul axei Ox cu viteza v = 𝑏√𝑥 (b > 0). Dacă la momentul t0 = 0
particula s-a aflat în punctul x0 = 0, să se calculeze a) accelerația particulei; b) dependența de timp a
vitezei; c) viteza medie pe un drum de lungime S.
6. Un corp pornește uniform accelerat cu viteza inițială v0 = 2 m/s și ajunge în punctul x0 = 300 m după
t = 1min. Să se afle: a) accelerația corpului; b) viteza finală a corpului.
7. Un corp, care se mișcă uniform variat, parcurge prima jumătate a drumului său d = 150 m în timpul
t1 = 10 s, iar cealaltă jumătate în timpul t2 = 5 s. Să se afle: a) accelerația corpului; b) viteza inițială a
corpului.
8. Din originea axei Ox pleacă un mobil cu viteza constantă v’ = 1 m/s, iar după t = 5 s pleacă un al
doilea mobil cu viteza inițială v0 = 5 m/s și accelerația a = − 0,7 m/s2. Să se afle, după cât timp de la
plecarea mobilului 2 cele două corpuri se vor întâlni. (Vezi indicațiile de la problema 4)
Observați că cele două corpuri se întâlnesc de două ori.
9. Un corp pornește uniform accelerat fără vitează inițială și parcurge astfel un drum d1 = 6 m, după
care merge uniform încetinit și parcurge astfel un drum d2 = 4 m până la oprire. Știind că timpul total de
mișcare este T = 10 s, să se calculeze accelerațiile în cele două mișcări.
𝑅: 𝑠 = 𝑑 ∙v
v1 + v2= 42 𝑘𝑚
R: a) v =v0𝑑
𝐿= 0,6
𝑚
𝑠 ; 𝑏) 𝑇 =
𝐿
v0= 250𝑠 = 4min 10𝑠
𝑅: 𝑎) 𝑎 =𝑏2
2 𝑏) v =
𝑏2
2∙ 𝑡 𝑐) v𝑚 = 𝑏√𝑆
𝑅: 𝑎) 𝑎 =2(x0 − v0 ∙ 𝑡
𝑡2= 0,1 𝑚/𝑠2; 𝑏) 𝑣′ =
2 ∙ x0𝑡
− v0 = 8 𝑚/𝑠
𝑅: 𝑎) 𝑎 = 𝑑 ∙𝑡2 − 𝑡1
𝑡1𝑡2(𝑡1 + 𝑡2)= 1 𝑚/𝑠2; 𝑏) v0 =
𝑑
2𝑡1−1
2𝑎𝑡1 = 2,5 𝑚/𝑠
𝑅: 𝑡1 =10
7 𝑠 ș𝑖 𝑡2 = 10 𝑠
𝑅: 𝑎1 =2(𝑑1 + 𝑑2)
2
𝑑1 ∙ 𝑇2= 0,33
𝑚
𝑠2; ș𝑖 𝑎2 = −
2(𝑑1 + 𝑑2)2
𝑑2 ∙ 𝑇2= −0,5 𝑚/𝑠2

13
10. Două mobile se deplasează pe o circumferință de lungime l = 40 m. Vitezele celor două mobile
sunt v1 și v2 (v1 > 2v2). Mobilele pornesc din același punct, în același sens și în același moment și se
întâlnesc la intervale de timp t0. Dacă se dublează viteza primului mobil, intervalul de timp la care se
întâlnesc scade cu 3 s, iar dacă se dublează viteza celui de-al doilea mobil, intervalul de timp după care
se întâlnesc crește cu 5 s. Să se afle valoarea timpului t0, precum și vitezele celor două mobile.
Indicație. Mișcându-se pe aceeași circumferință, cu viteze diferite, până la întâlnire mobilul cu viteza
mai mare, v1, va parcurge un spațiu egal cu lungimea circumferinței plus o distanță x, în timp ce cel de-
al doilea mobil va parcurge doar distanța x. Și așa mai departe pentru fiecare situație în parte.
R: Pentru t0 se poate obține ecuația: 𝑡02 + 4𝑡0 + 45 = 0, de unde rezultă pentru t0 valorile t01 = 5 s și
t02 = − 9 s. Evident, valoarea t02 = − 9 s nu se acceptă. În fizica clasică valorile negative ale timpului nu
au sens. Vitezele au valorile v1 = 12 m/s și v2 = 4 m/s.
11. Un corp cade liber de la înălțimea ℎ = 15 𝑚. În același timp este aruncat pe verticală în sus un alt
corp, cu viteza inițială v0 = 10 m/s. După cât timp și la ce înălțime se întâlnesc cele două corpuri?
(𝑔 = 10 𝑚/𝑠2).
R: 𝑡 = 1,5 𝑠, ℎ = 4 𝑚
12. Două corpuri sunt aruncate vertical în sus cu vitezele inițiale v01 = 60 𝑚/𝑠 și v02 = 40 m/s, corpul
al doilea la un interval de timp 𝜏 = 6,0 𝑠, după primul. După cât timp și la ce înălțime se vor întâlni
corpurile? (𝑔 = 10 𝑚/𝑠2).
13. Un corp cade liber de la înălțimea ℎ = 1,1 𝑘𝑚 și parcurge astfel distanța ℎ′ = 314 𝑚, după care își
continuă mișcarea uniform până la atingerea Pământului. Să se calculeze durata mișcării.
(𝑔 = 10 𝑚/𝑠2).
R: s18'gh2
'hht
14. Să se afle înălțimea h de la care cade liber un corp și durata T a mișcării sale, știind că în intervalul
𝜏 = 1𝑠 înainte de atingerea Pământului, el străbate o fracțiune 𝑘 = 0,19 din înălțimea totală de la care
cade.
R: s10k
k11T
,
2
Tgh
2
15. Un corp este aruncat orizontal cu viteza 𝑣0 = 10 𝑚/𝑠. De la ce la ce înălțime a fost aruncat, dacă
această înălțime este egală cu distanța orizontală de cădere? (𝑔 = 10 𝑚/𝑠2).
R: m20g
v2h
2
0
BIBLIOGRAFIE:
1. A. Hristev, V. Fălie, D. Manda – FIZICA, Editura Didactică și Pedagogică, București – 1984
2. O. Rusu, M. Chiriță – FIZICĂ, manual pentru clasa a IX-a, Editura NICULESCU, 2004
3. T. Crețu – FIZICĂ. Teorie și probleme, EDITURA TEHNICĂ, București 1991.
4. http://www.manualdefizica.ro/subiectele-de-mecanica/
5. http://www.manualdefizica.ro/raspunsurile-subiectelor-de-mecanica/
6. http://www.manualdefizica.ro/
7. https://ro.wikipedia.org/wiki/Pagina_principal%C4%83
Related Documents











