INTELIGENTNE ELEMENTY WYKONAWCZE AUTOMATYKI Michał Michał Bartyś Bartyś SYSTEMY SYSTEMY MECHATRONICZNE MECHATRONICZNE Politechnika Warszawska Wydział Mechatroniki • • Wprowadzenie Wprowadzenie • • Element wykonawczy Element wykonawczy • • Problemy Problemy • • Opis zjawisk fizycznych Opis zjawisk fizycznych • • Przyklady konstrukcji Przyklady konstrukcji • • Elementy elektro Elementy elektro - - pneumatyczne pneumatyczne • • Elementy elektryczne Elementy elektryczne • • Diagnostyka bieŜąca Diagnostyka bieŜąca • • Symulacja ukladów wykonawczych Symulacja ukladów wykonawczych • • Uwagi końcowe Uwagi końcowe Politechnika Warszawska, Wydział Mechatroniki

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

INTELIGENTNE ELEMENTY WYKONAWCZE AUTOMATYKI
MichałMichał Bartyś Bartyś
SYSTEMY SYSTEMY MECHATRONICZNEMECHATRONICZNE
Politechnika Warszawska
Wydział Mechatroniki
•• Wprowadzenie Wprowadzenie •• Element wykonawczyElement wykonawczy•• ProblemyProblemy•• Opis zjawisk fizycznychOpis zjawisk fizycznych•• Przykłady konstrukcjiPrzykłady konstrukcji•• Elementy elektroElementy elektro--pneumatycznepneumatyczne•• Elementy elektryczneElementy elektryczne•• Diagnostyka bieŜąca Diagnostyka bieŜąca •• Symulacja układów wykonawczychSymulacja układów wykonawczych•• Uwagi końcoweUwagi końcowe
Politechnika Warszawska, Wydział Mechatroniki
Sztuczna inteligencja?Sztuczna inteligencja?
Inteligencja naturalna- zdolność do samodzielnego (twórczego) formułowania i
rozwiązywania problemów
Inteligencja sztuczna- zdolność komunikacji ze światem zewnętrznym- zdolność wnioskowania- zdolność adaptacji do zmieniających się warunków
Podstawowe wątpliwości
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
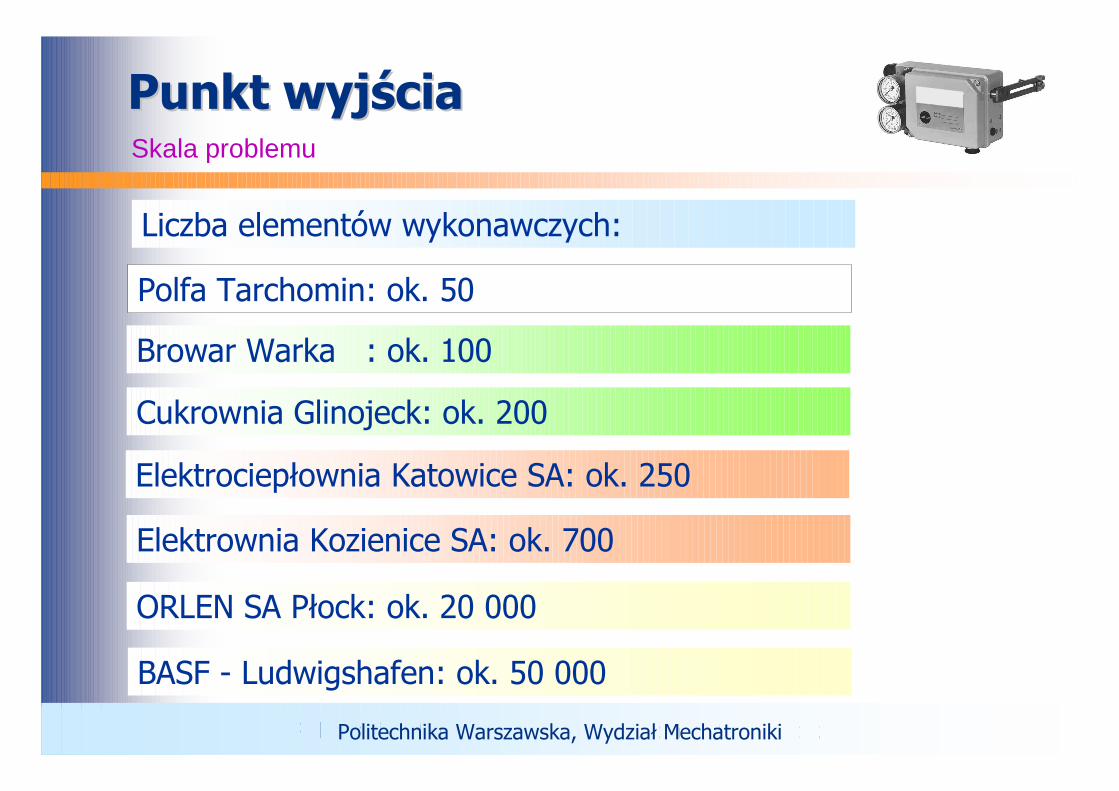
Punkt wyjściaPunkt wyjścia
Liczba elementów wykonawczych:
Skala problemu
BASF - Ludwigshafen: ok. 50 000
Cukrownia Glinojeck: ok. 200
ORLEN SA Płock: ok. 20 000
Elektrownia Kozienice SA: ok. 700
Browar Warka : ok. 100
Elektrociepłownia Katowice SA: ok. 250
Polfa Tarchomin: ok. 50
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Miejsce elementu wykonawczego w układzie automatyki
Element wykonawczy
CV Fe L Regulator Obiekt
SP
PV
Przetwornik pomiarowy
Element wykonawczyElement wykonawczySchemat blokowy
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Element wykonawczyElement wykonawczyRola i miejsce elementu wykonawczego w układzie automatyki
Przetwornik
eSP
PV
CV
Element
wykonawczy
F L
Zakłócenia
Regulator
PID G Obiekt
System DDC InstalacjaŁącze Aktuator
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
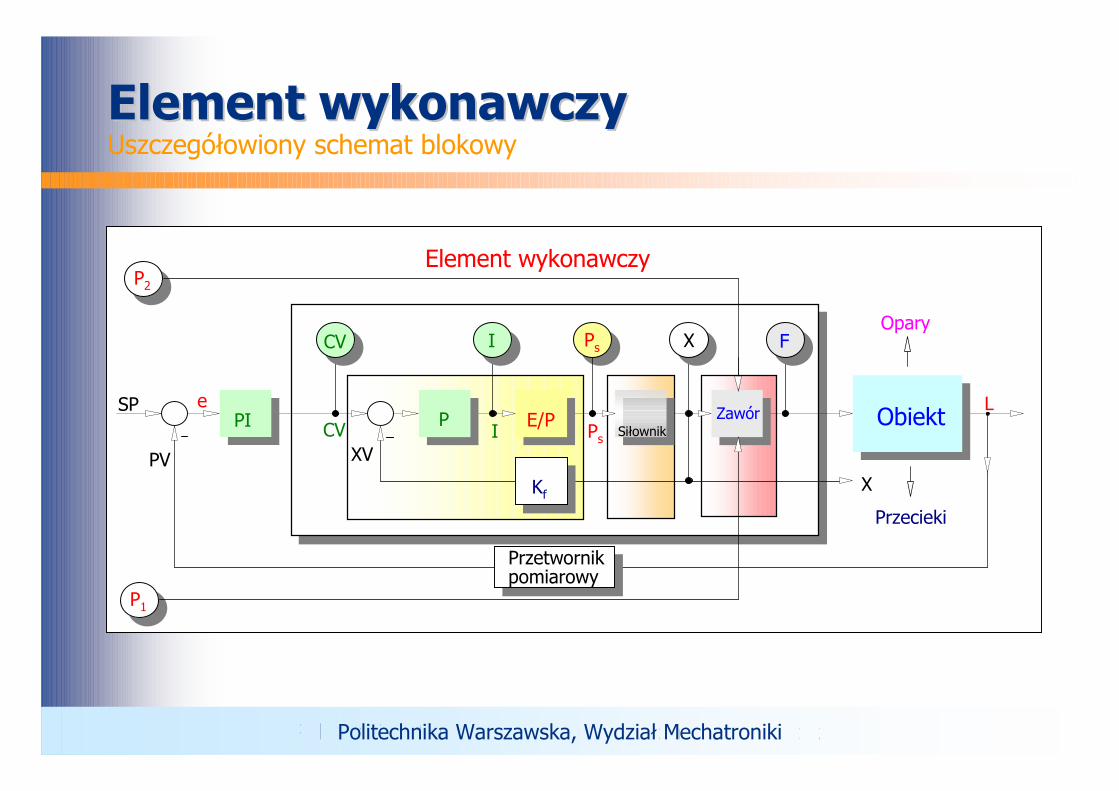
Element wykonawczy
LObiekt
Przetwornik pomiarowy
ePI
SP
PV
CV
CV
P I
I
E/P Ps
Ps
XV
Siłownik
X
Kf
Zawór
FOpary
Przecieki
P2
P1
X
Element wykonawczyElement wykonawczyUszczegółowiony schemat blokowy
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
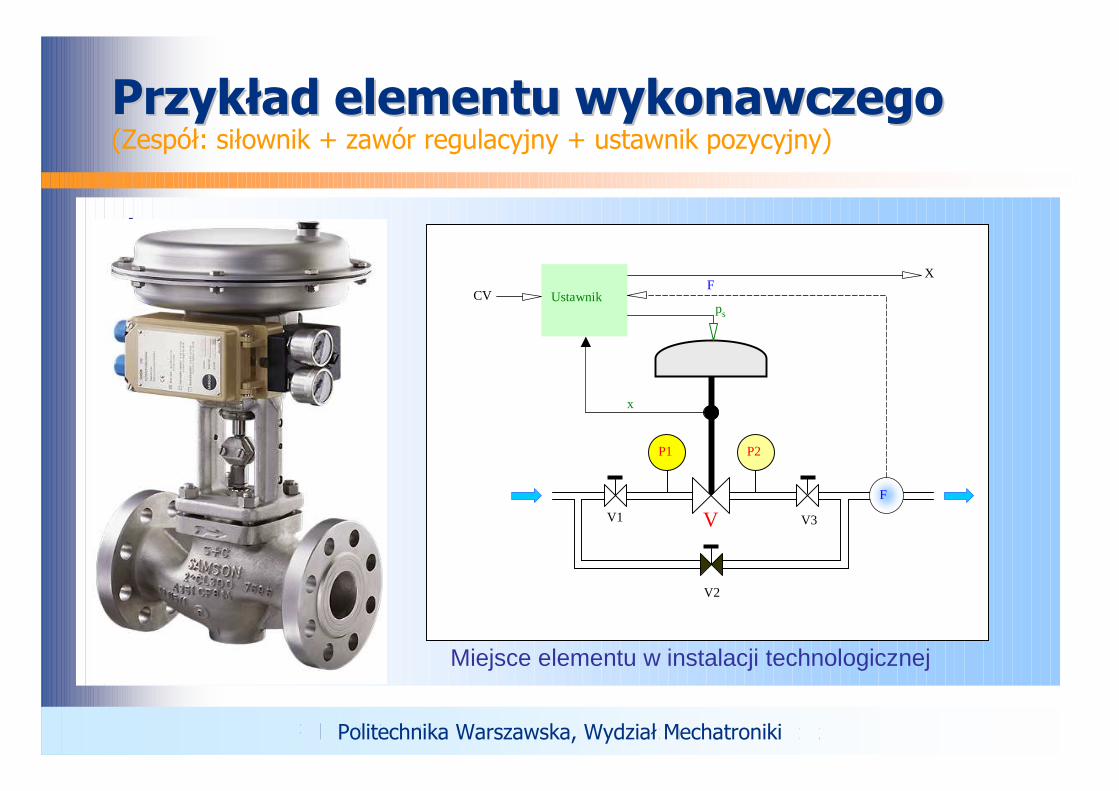
Przykład elementu wykonawczegoPrzykład elementu wykonawczego((Zespół: siłownik + zawór regulacyjny + ustawnik pozycyjny)
Actuator structure
Miejsce elementu w instalacji technologicznej
F
P2P1
x
CV Ustawnik
X
V1 V3V
V2
ps
F
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Przykład zastosowaniaPrzykład zastosowaniaPrzemysł spoŜywczy
Układ regulacji poziomu soku rzadkiego w stacji wyparnej
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
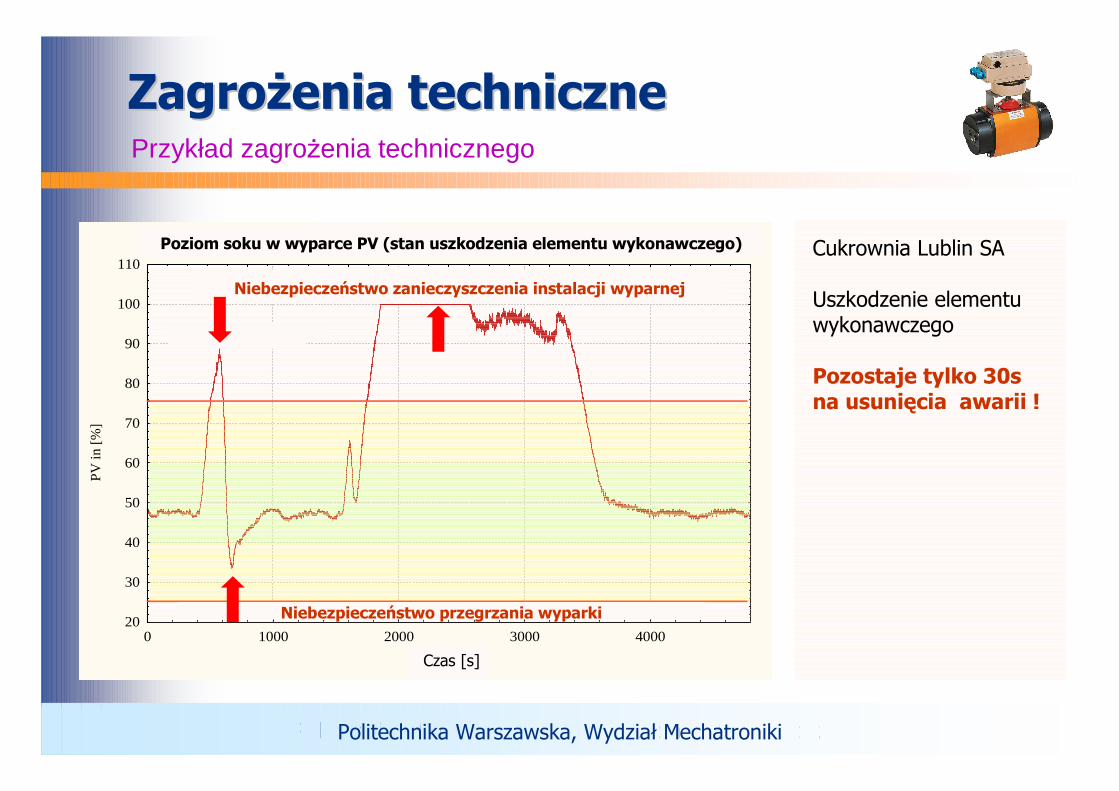
ZagroŜenia techniczneZagroŜenia technicznePrzykład zagroŜenia technicznego
Cukrownia Lublin SA
Uszkodzenie elementu wykonawczego
Pozostaje tylko 30s na usunięcia awarii !
Juice level in evaporator (snap-shot from faulty state)
Time [s]
PV
in [%
]
20
30
40
50
60
70
80
90
100
110
0 1000 2000 3000 4000
Dangerous situation
Manual control test
Juice level in evaporator (snap-shot from faulty state)
Time [s]
PV
in [%
]
20
30
40
50
60
70
80
90
100
110
0 1000 2000 3000 4000
Dangerous situation
Manual control test
Poziom soku w wyparce PV (stan uszkodzenia elementu wykonawczego)
Czas [s]
Niebezpieczeństwo zanieczyszczenia instalacji wyparnej
Niebezpieczeństwo przegrzania wyparki
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
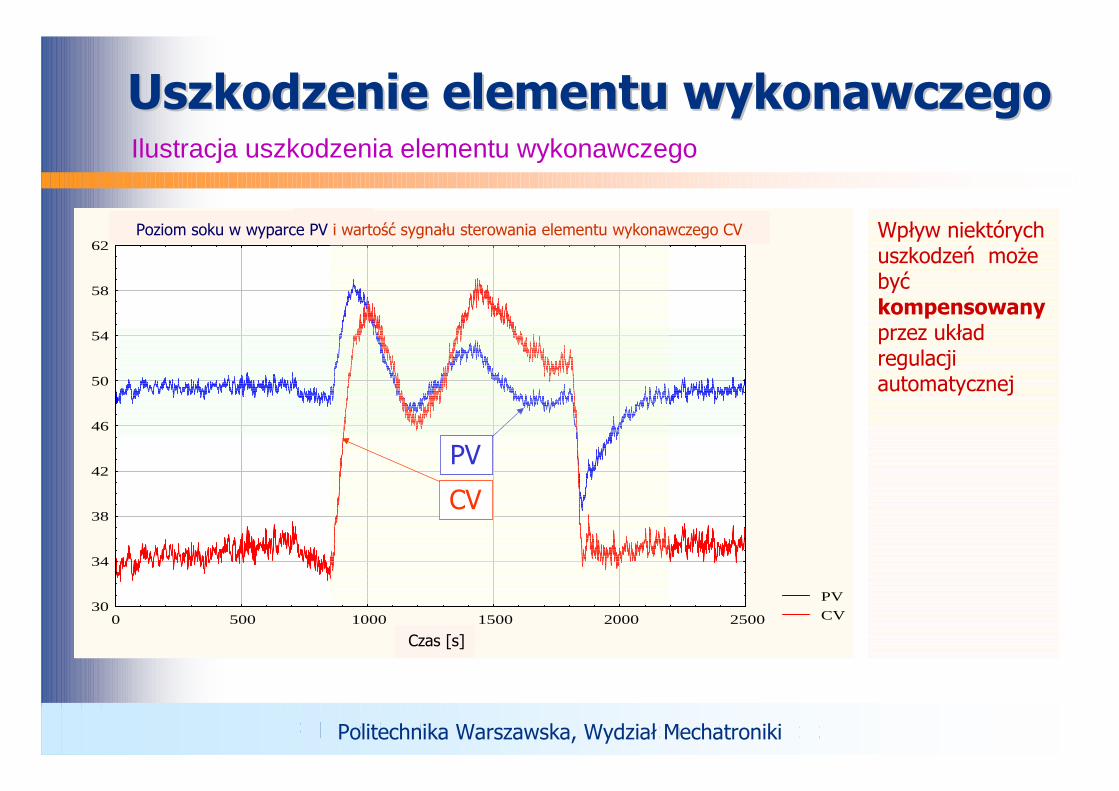
Uszkodzenie elementu wykonawczegoUszkodzenie elementu wykonawczegoIlustracja uszkodzenia elementu wykonawczego
Politechnika Warszawska, Instytut Automatyki i Robotyki
PV
CV
Juice level in evaporator PV and CV values
Time [s]
30
34
38
42
46
50
54
58
62
0 500 1000 1500 2000 2500
CV
PV
Wpływ niektórych uszkodzeń moŜe być kompensowanyprzez układ regulacji automatycznej
Czas [s]
Poziom soku w wyparce PV i wartość sygnału sterowania elementu wykonawczego CV
Politechnika Warszawska, Wydział Mechatroniki
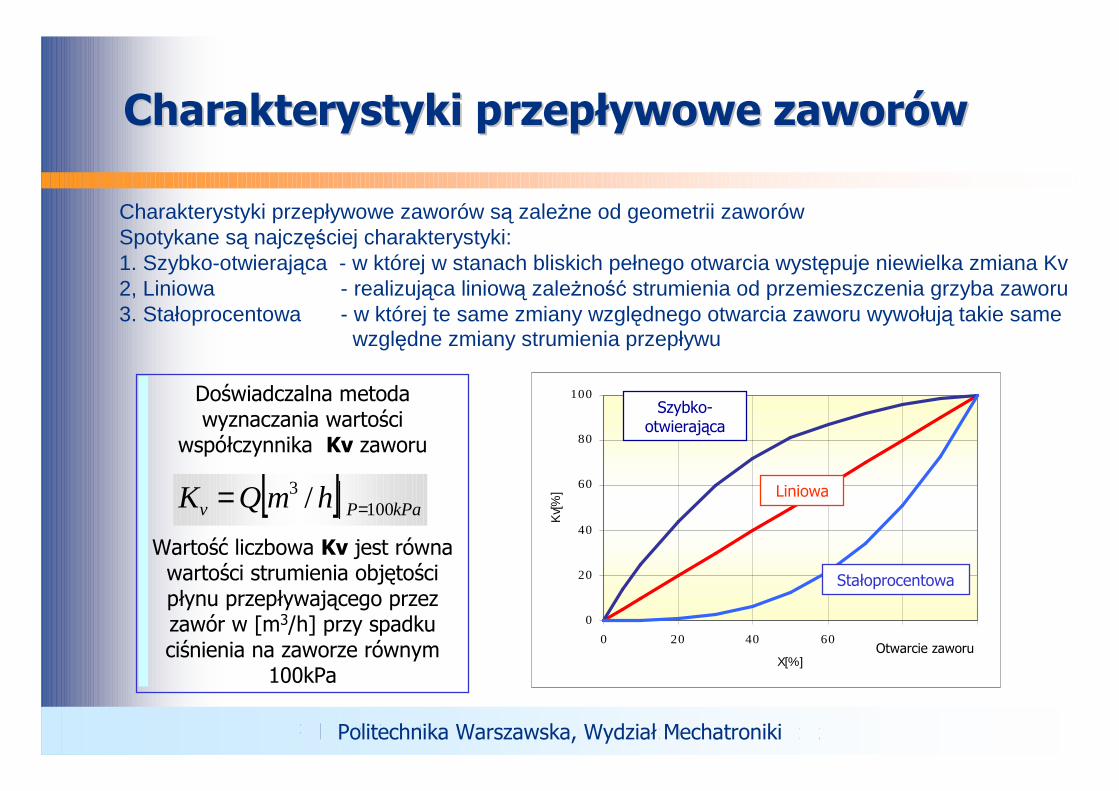
Doświadczalna metoda wyznaczania wartości
współczynnika Kv zaworu
Wartość liczbowa Kv jest równa wartości strumienia objętości płynu przepływającego przez zawór w [m3/h] przy spadku ciśnienia na zaworze równym
100kPa
[ ] kPaPv hmQK 1003 / ==
Charakterystyki przepływowe zaworówCharakterystyki przepływowe zaworów
Charakterystyki przepływowe zaworów są zaleŜne od geometrii zaworówSpotykane są najczęściej charakterystyki:1. Szybko-otwierająca - w której w stanach bliskich pełnego otwarcia występuje niewielka zmiana Kv 2, Liniowa - realizująca liniową zaleŜność strumienia od przemieszczenia grzyba zaworu3. Stałoprocentowa - w której te same zmiany względnego otwarcia zaworu wywołują takie same
względne zmiany strumienia przepływu
0
20
40
60
80
100
0 20 40 60 80 100
X[%]
Kv[
%]
Szybko-otwierająca
Liniowa
Stałoprocentowa
Otwarcie zaworu
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
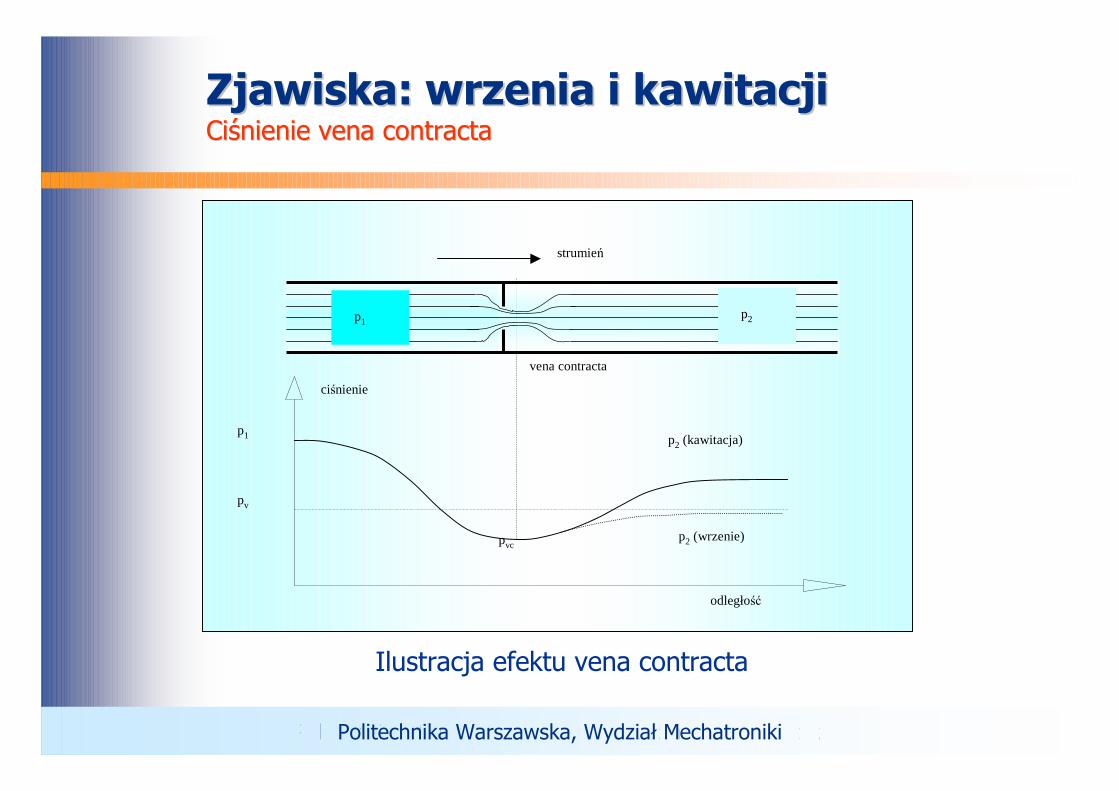
Zjawiska: wrzenia i kawitacji Zjawiska: wrzenia i kawitacji Ciśnienie Ciśnienie vena contractavena contracta
Ilustracja efektu vena contracta
strumień
p1 p2 (kawitacja)
odległość
p2 (wrzenie)
ciśnienie
pv
vena contracta
pvc
p1p2
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Supply pressure in [kPa]
Re
lativ
e p
isto
n d
isp
lace
me
nt i
n [%
]
0
10
20
30
40
50
60
70
80
90
100
110
0 10 20 30 40 50 60 70 80 90 100 110 120
Nominal stroke 38,1 mm. Valve diameter DN80.
Problem Problem -- tarcie w urządzeniu wykonawczymtarcie w urządzeniu wykonawczymWyniki badań laboratoryjnych
Przykładowa charakterystyka statyczna membranowego siłownika pneumatycznego
histereza 10 %
Ciśnienie zasilania w [kPa]
Skok nominalny 38,1 mm. Zawór DN80
Przemieszczenie tłoczyska w [%]
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
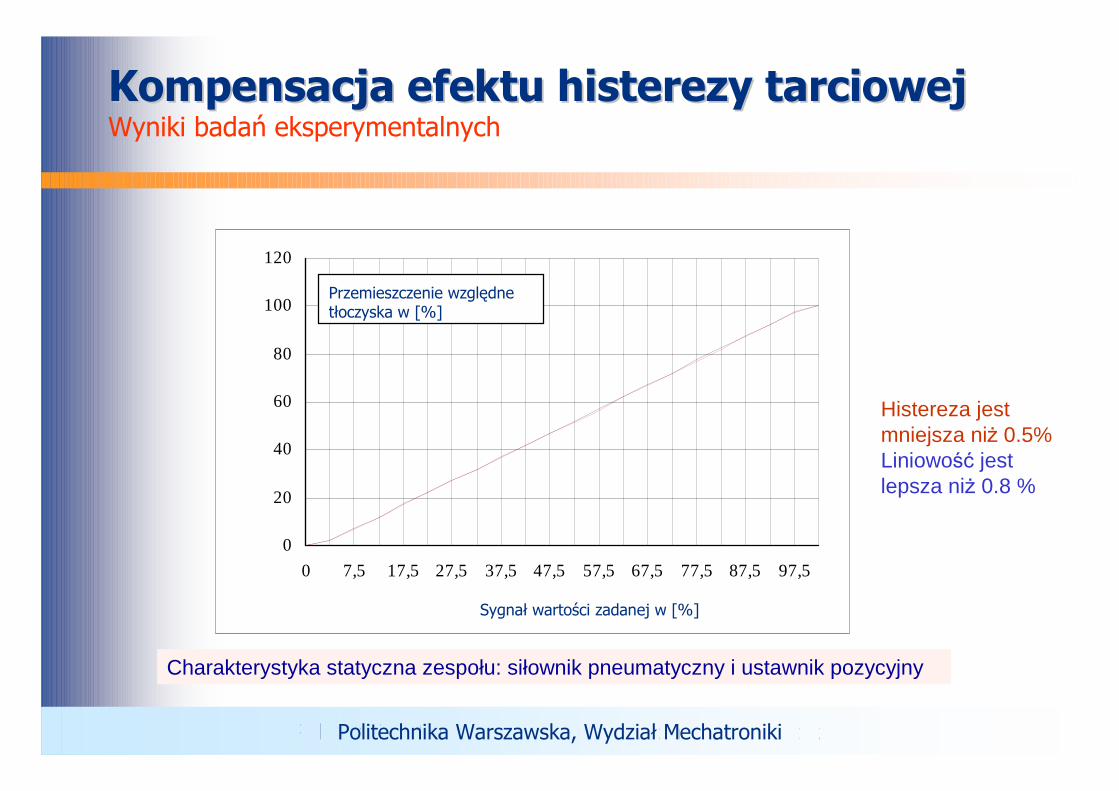
Kompensacja efektu histerezy tarciowejKompensacja efektu histerezy tarciowejWyniki badań eksperymentalnych
Charakterystyka statyczna zespołu: siłownik pneumatyczny i ustawnik pozycyjny
Histereza jest mniejsza niŜ 0.5%Liniowość jest lepsza niŜ 0.8 %
0
20
40
60
80
100
120
0 7,5 17,5 27,5 37,5 47,5 57,5 67,5 77,5 87,5 97,5
Contro l s igna l in [%]
Re
lativ
e p
isto
n r
od
dis
pla
cem
en
t in
[%]
Sygnał wartości zadanej w [%]
Przemieszczenie względne tłoczyska w [%]
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Klasyfikacja elementów wykonawczych Klasyfikacja elementów wykonawczych (Grupy klasyfikacyjne)
Elementy wykonawcze♦ pneumatyczne♦ elektropneumatyczne♦ z napędem elektrycznym
Ustawniki pozycyjne♦ z wejściem analogowym♦ z wejściem cyfrowym♦ hybrydowe
Ustawniki pozycyjne♦ klasyczne♦ inteligentne
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Element wykonawczy Element wykonawczy -- dynamikadynamikaWymagania na odpowiedź na wymuszenie skokowe
Odpowiedzi na wymuszenia skokowe
Sygnał sterujący CV
Czas regulacji t [s]
CV,PV,X
Zakres tolerancji
Przeregulowanie
Odchyłka regulacji
CV
e
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Siłownik pneumatyczny Siłownik pneumatyczny (eksperyment)(eksperyment)Zespół przetwornika elektro-pneumatycznego i siłownika
Wyniki eksperymentalne(bez zaworu regulacyjnego)(siłownik typu 37, zakres nominalny ruchu 38,1 mm)Wejście: I - prąd przetwornika E/PWyjście: X - przemieszczenie tłoczyska
Odpowiedź na wymuszenie skokoweOdpowiedź na wymuszenie skokowe
Ruch tłoczyska odbywa się w kierunku
zamknięcia hipotetycznego zaworu
0
20
40
60
80
100
120
0 10 20 30 40
czas [s ]
X [%
]
Efekt wstępnego napięcia spręŜyny siłownika
Ograniczniki ruchu
Ekstrapolacja wybiegutłoczyska siłownika
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Wyraźna asymetria odpowiedzi na symetryczne wymuszenia skokowe
-50
0
50
100
0 5 10 15 20 25 30 35 40
czas[s]
X [%
]
Ekstrapolacja przemieszczenia tłoczyska siłow nika
Siłownik pneumatyczny Siłownik pneumatyczny (eksperyment)(eksperyment)Zespół przetwornika elektro-pneumatycznego i siłownika
Wyniki eksperymentalne(bez zaworu regulacyjnego)(siłownik typu 37, zakres nominalny ruchu 38,1 mm)Wejście: I - prąd przetwornika E/PWyjście: X - przemieszczenie tłoczyska
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
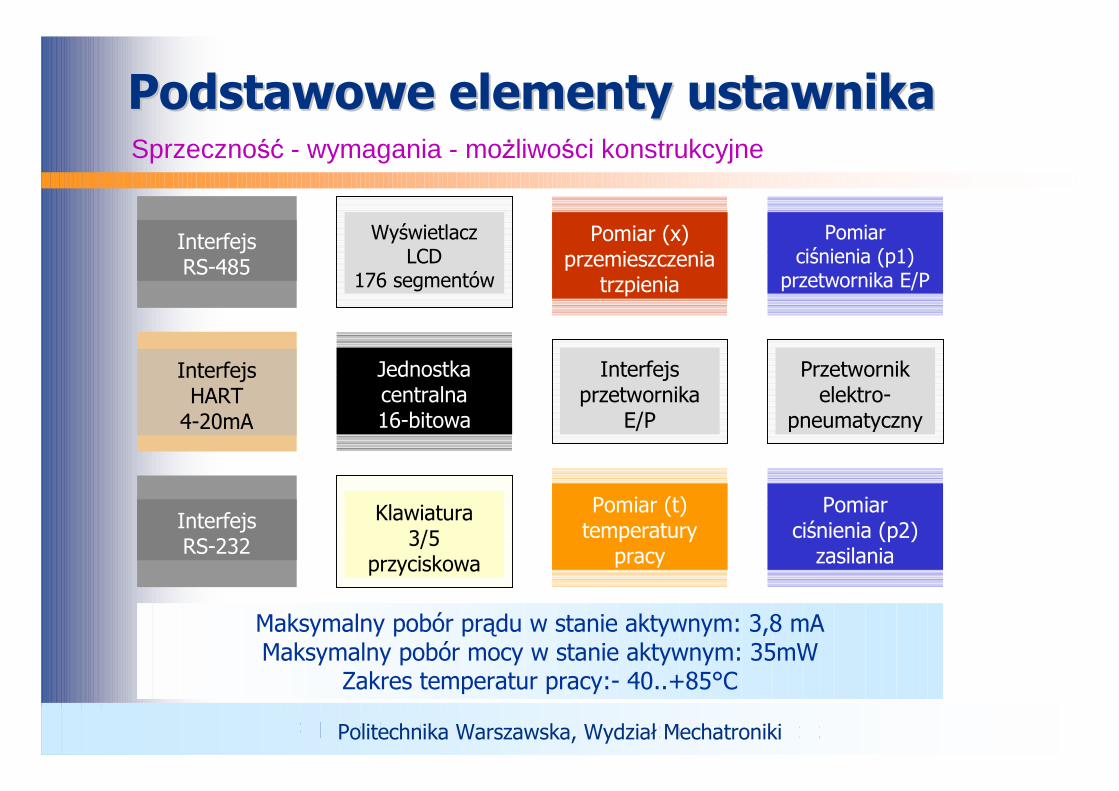
Podstawowe elementy ustawnikaPodstawowe elementy ustawnikaSprzeczność - wymagania - moŜliwości konstrukcyjne
Przetwornik
E/P
InterfejsRS-232
InterfejsRS-485
InterfejsHART
4-20mA
Jednostkacentralna16-bitowa
Klawiatura3/5
przyciskowa
Pomiar (x)przemieszczenia
trzpienia
Interfejsprzetwornika
E/P
Pomiar (t)temperatury
pracy
Pomiar ciśnienia (p1)
przetwornika E/P
Przetwornikelektro-
pneumatyczny
Pomiar ciśnienia (p2)
zasilania
WyświetlaczLCD
176 segmentów
Maksymalny pobór prądu w stanie aktywnym: 3,8 mAMaksymalny pobór mocy w stanie aktywnym: 35mW
Zakres temperatur pracy:- 40..+85°C
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

PozycjonerPozycjonerPrzykład konstrukcyjnego schematu blokowego pozycjonera z interfejsem HART
1 Indukcyjny przetwornik przemieszczeniatrzpienia grzyba zaworu
2 Jednostka mikroprocesorowa realizującazadania regulacyjne
3 Zawór sterujący4 Zawór sterujący5 Jednostka mikroprocesorowa realizująca
zadania komunikacyjne6 Zawór redukcyjny ciśnienia7 Zasilanie pneumatyczne 8 Wejście sygnału sterującego HART
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

PozycjonerPozycjonerPrzykład konstrukcyjnego schematu blokowego pozycjonera z interfejsem HART
µC
µC
DAD
AWejście HARTlub 4 .. 20 mA
FSK
& PWM
Odpowietrzanie
Wymuszone odpowietrzenie
Napowietrzanie
Zasilanie pneumatyczne
140..600kPa
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

PozycjonerPozycjonerPrzykład algorytmu sterowania ciśnieniem metodą PWM
Okres modulacji = 35ms
Typ modulacji: PWMtmax
t50
tmin
T=35 ms
t [s]
eZakres
proporcjonalny
Y[%]=t * 100%
TZalety: - niska cena- prosta konstrukcja- proste sterowanie- niskie zuŜycie własne powietrza
Wady: - ograniczona trwałość- hałas- niska dynamika
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Ustawnik pozycyjnyUstawnik pozycyjnyStruktura ustawnika A-785
y
+uGain
-1000,0 .. 1000,0%
GAIN SP
e
-
-10000 .. 10000%
GAIN KP
HISTH DEAD
Controller
MAN PWM
0 .. Cur HI
Manual PWM
+
OFFSET
-1000,0 .. 1000,0%
Biass
Gain
-1000,0 .. 1000,0%
GAIN PV
-1000,0 .. 1000,0%
ALARMS
sp
(100%-sp)
REVERS
modeRevers
0 ... 1500 uA
Cur LO
E/P Transducer
ym
G (s)
Actuator
PV LOWPV HIGH
Normalisation
0 .. 100%
ym
A U T O
Potentiometr
ALAR HIALAR LO
0 .. Cur HI
Manual E/PcontrolE/P control
MANUAL
12
3 4
2 G (s)1
& correction
Cur MICur HI
SPManual
control-1000,0 .. 1000,0%
GAIN SP=100%
Normalisation
SP LOW
4 .. 20 mA
SP HIGH
0 .. 100%
& correction
CORR. 1CHECK 1
CORR. 2CHECK 2
II order
FILTER
0 .. 100,0s
lag filter
Ti Td
k = 100
BOOSTER
vPID
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
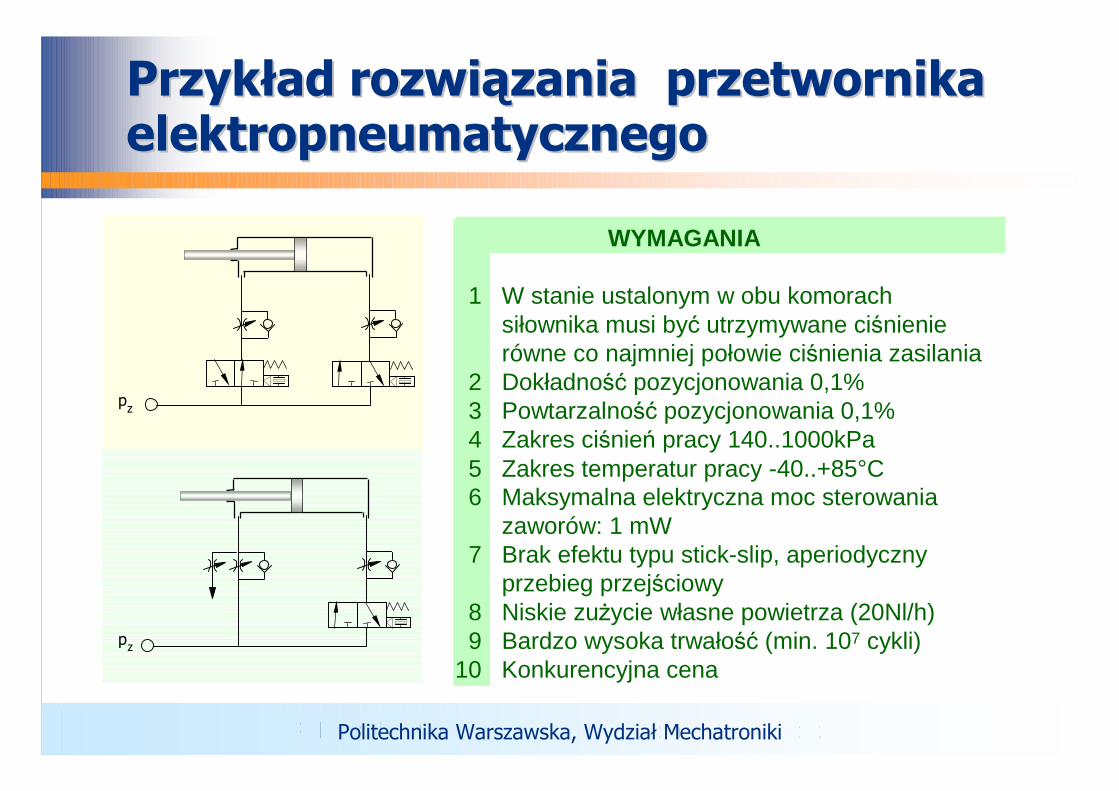
Przykład rozwiązania przetwornika Przykład rozwiązania przetwornika elektropneumatycznego elektropneumatycznego
Politechnika Warszawska, Instytut Automatyki i Robotyki
WYMAGANIA
1 W stanie ustalonym w obu komorachsiłownika musi być utrzymywane ciśnienierówne co najmniej połowie ciśnienia zasilania
2 Dokładność pozycjonowania 0,1%3 Powtarzalność pozycjonowania 0,1%4 Zakres ciśnień pracy 140..1000kPa5 Zakres temperatur pracy -40..+85°C6 Maksymalna elektryczna moc sterowania
zaworów: 1 mW7 Brak efektu typu stick-slip, aperiodyczny
przebieg przejściowy8 Niskie zuŜycie własne powietrza (20Nl/h) 9 Bardzo wysoka trwałość (min. 107 cykli)
10 Konkurencyjna cenap
z
pz
Politechnika Warszawska, Wydział Mechatroniki

Typowym sygnałem wyjściowym jest sygnał siły lub momentu
Typowym sygnałem wejściowym jest sygnał 4..20mA
Sygnałem wyjściowym jest sygnał nastawiający
Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczydefinicje
Siłownik elektrycznyjest elementem wykonawczym w układzie sterowania przetwarzającym energię elektryczną na mechaniczną (siła, moment obrotowy).
Sygnałem wejściowym jest sygnał wartości sterującej CV
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczyOsprzęt
Politechnika Warszawska, Instytut Automatyki i Robotyki
Nadajnik połoŜeniaurządzenie odwzorowujące połoŜenie elementu wyjściowego w sposób ciągły za pomocą sygnałów elektrycznych, które mogą być wykorzystywane w układach regulacji automatycznej.
Wskaźnik połoŜeniaurządzenie słuŜące do wzrokowego określenie połoŜenia wyjściowego elementunastawczego.
Wyłącznik połoŜeniowy krańcowywyłącznik zamykający lub otwierający obwód elektryczny siłownika po osiągnięciunastawionego połoŜenia
Wyłącznik połoŜenia pośredni - wyłącznik przeznaczony do sygnalizacji lub wysyłaniasygnałów do sterowania urządzeniami współpracującymi, w momencie osiągnięciaprzez element wyjściowy nastawionego połoŜenia pośredniego między połoŜeniaminastawionymi wyłącznikami połoŜenia krańcowego.
Politechnika Warszawska, Wydział Mechatroniki
Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczyUrządzenia dodatkowe
Politechnika Warszawska, Instytut Automatyki i Robotyki
Luzownik (hamulec)urządzenie, które po zasileniu napięciem, odblokowuje ruch wirnika silnika napędowego, a przy zaniku napięcia zasilającego blokuje ruch wirnika silnika napędowego. Luzownik ogranicza drogę wybiegu elementu wyjściowego oraz utrzymuje go w połoŜeniu, w którym znajdował się w chwili zaniku napięcia zasilającego.
Zespół napędu ręcznegourządzenie połączone z przekładnią redukcyjną, umoŜliwiające ręczne przesunięcieelementu wyjściowego
Układ przeciąŜeniowyurządzenie nastawne umoŜliwiające ograniczenie siły wyjściowej lubmomentu wyjściowego zabezpieczające przed skutkami przeciąŜenia
Politechnika Warszawska, Wydział Mechatroniki

Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczyDefinicje
Politechnika Warszawska, Instytut Automatyki i Robotyki
Siłownik regulacyjnysiłownik przeznaczony do pracy w zamkniętych układach regulacji automatycznej
Siłownik sterowniczysiłownik przeznaczony do pracy w otwartych układach regulacji automatycznej
Siłownik stałoprędkościowysiłownik, którego element wyjściowy porusza się w określonym kierunku ze stałą prędkością
Siłownik zmiennoprędkościowy (siłownik ze sterowana prędkością)siłownik, którego element wyjściowy porusza się w określonym kierunku z prędkością zaleŜną od wartości sygnału sterującego.
Politechnika Warszawska, Wydział Mechatroniki

Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczy„ siłownik elektryczny”
Klasyfikacja♦ liniowe♦ wahliwe♦ obrotowe
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczysiłownik liniowy
Siłownik, którego element wyjściowywykonuje ruch posuwisto-zwrotny
Politechnika Warszawska, Instytut Automatyki i Robotyki
Napęd zaworów grzybowych, szklankowych, zasuw itp.
Politechnika Warszawska, Wydział Mechatroniki

Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczysiłownik wahliwy
Siłownik, którego element wyjściowywykonuje ruch obrotowy o zakresie nie przekraczającym kąta pełnego
Politechnika Warszawska, Instytut Automatyki i Robotyki
Napęd zaworów kulowych, zasuw i klap regulacyjnych
Politechnika Warszawska, Wydział Mechatroniki

Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczysiłownik obrotowy
Siłownik, którego element wyjściowywykonuje ruch obrotowy na drodze kątowej o zakresie przekraczającym kąt pełny
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
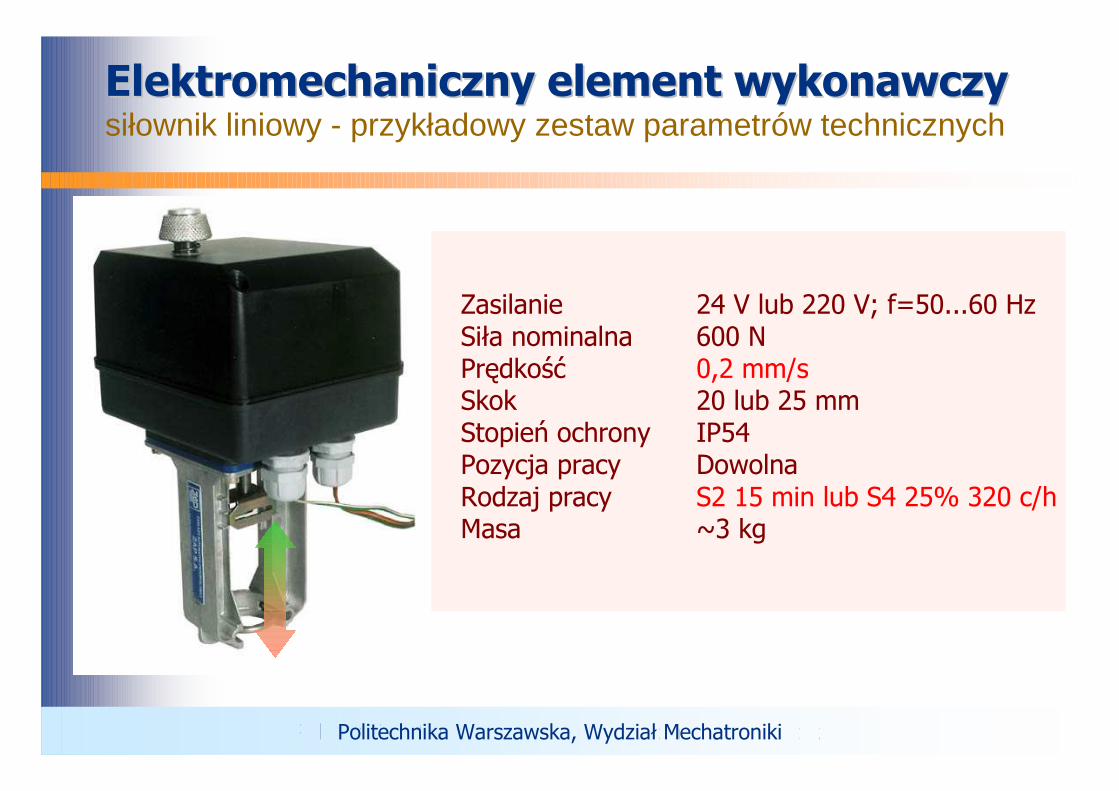
Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczysiłownik liniowy - przykładowy zestaw parametrów technicznych
Politechnika Warszawska, Instytut Automatyki i Robotyki
ZasilanieSiła nominalnaPrędkośćSkokStopień ochronyPozycja pracyRodzaj pracyMasa
24 V lub 220 V; f=50...60 Hz600 N0,2 mm/s20 lub 25 mmIP54DowolnaS2 15 min lub S4 25% 320 c/h~3 kg
Politechnika Warszawska, Wydział Mechatroniki
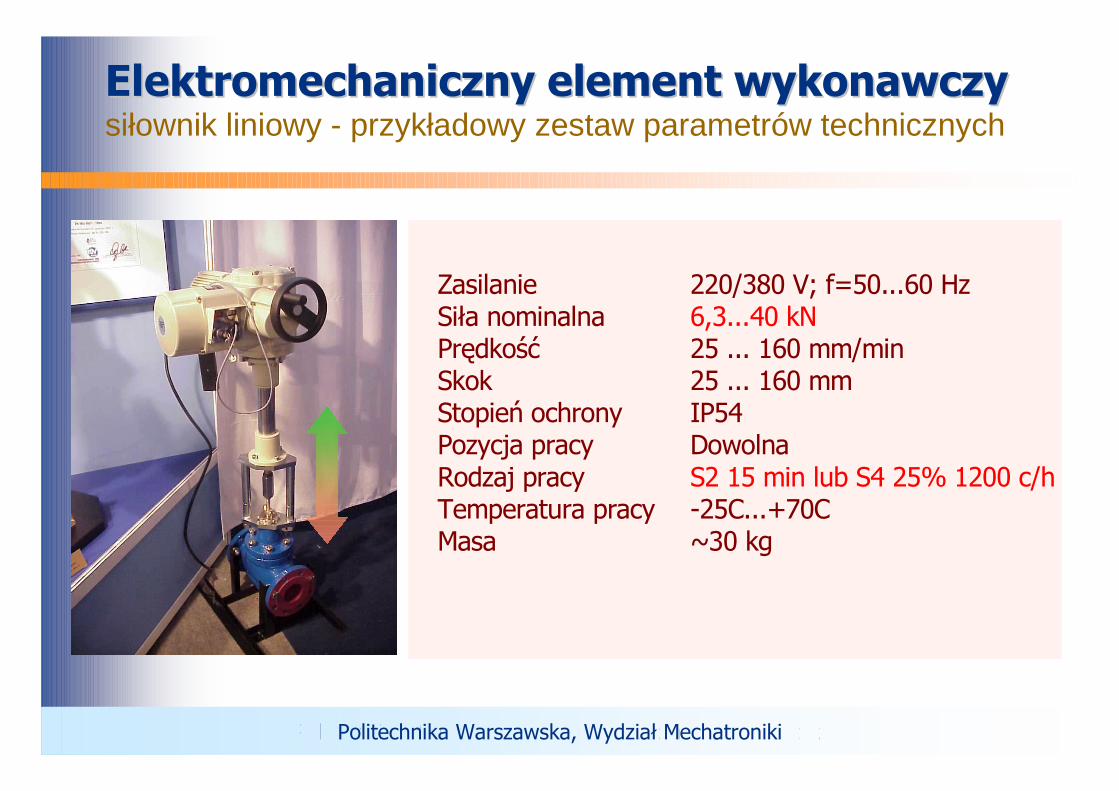
Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczysiłownik liniowy - przykładowy zestaw parametrów technicznych
Politechnika Warszawska, Instytut Automatyki i Robotyki
ZasilanieSiła nominalnaPrędkośćSkokStopień ochronyPozycja pracyRodzaj pracyTemperatura pracyMasa
220/380 V; f=50...60 Hz6,3...40 kN25 ... 160 mm/min25 ... 160 mmIP54DowolnaS2 15 min lub S4 25% 1200 c/h-25C...+70C~30 kg
Politechnika Warszawska, Wydział Mechatroniki

Elektromechaniczny element wykonawczyElektromechaniczny element wykonawczysiłownik obrotowy - przykładowy zestaw parametrów technicznych
Politechnika Warszawska, Instytut Automatyki i Robotyki
ZasilanieMoment nominalnyPrędkość kątowaStopień ochronyPozycja pracyRodzaj pracyTemperatura pracyMasa
220/380 V; f=50...60 Hz150 Nm10 lub 25 mm/minIP54DowolnaS2 15 min lub S4 25% 630 c/h-25C...+55C~25 kg
Politechnika Warszawska, Wydział Mechatroniki

Diagnostyka w elementach wykonawczychDiagnostyka w elementach wykonawczychGłówne zadania i oczekiwane efekty
Politechnika Warszawska, Instytut Automatyki i Robotyki
� Detekcja uszkodzeń
� Lokalizacja uszkodzeń
� Sygnalizacja diagnoz
• Redukcja strat w stanach z uszkodzeniami
• Uniknięcie stanów awaryjnych
• Obsługa serwisowa na podstawie stanu urządzenia
• Znaczna redukcja kosztów serwisu
• MoŜliwość diagnozowania urządzeń zabudowanych
w miejscach trudno dostępnych
Politechnika Warszawska, Wydział Mechatroniki

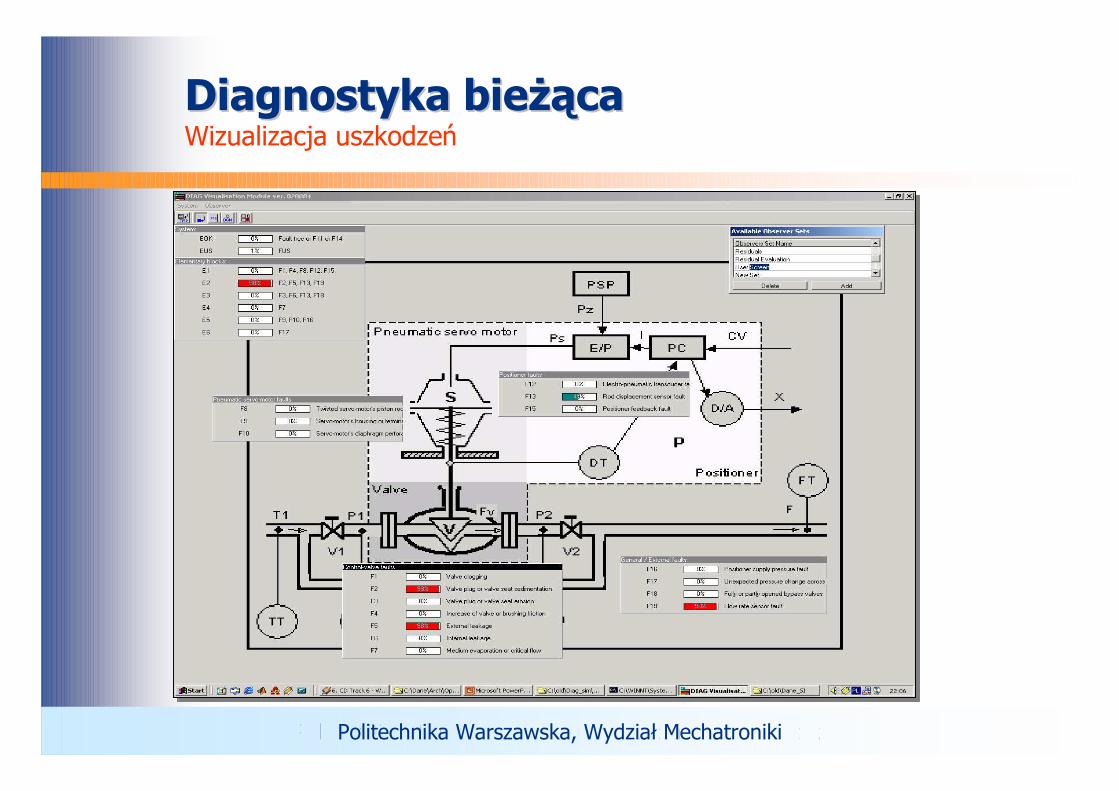
Zbiór uszkodzeńZbiór uszkodzeńUszkodzenia zaworu + uszkodzenia siłownika
f1 - zablokowanie zaworu przez ciało obcef2 - zmiana charakterystyki przepływowej w wyniku zjawiska sedymentacjif3 - zuŜycie erozyjne zaworuf4 - wzrost sił tarcia w dławicy lub w gnieździef5 - przeciek zewnętrzny medium f6 - przeciek wewnętrzny medium f7- wystąpienie zjawiska kawitacji
Uszkodzenia zaworuUszkodzenia zaworu
Uszkodzenia siłownikaUszkodzenia siłownikaf8 - skrzywienie tłoczyska siłownikaf9 - nieszczelność komory siłownika lub przyłączy pneumatycznychf10 - przebicie membrany siłownikaf11 - uszkodzenie spręŜyny
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
Zbiór uszkodzeńZbiór uszkodzeńUszkodzenia ustawnika + uszkodzenia zewnętrzneUszkodzenia ustawnika + uszkodzenia zewnętrzne
Uszkodzenia ustawnikaUszkodzenia ustawnika
Uszkodzenia zewnętrzneUszkodzenia zewnętrzne
f12 - uszkodzenie przetwornika e/pf13 - uszkodzenie toru pomiarowego połoŜenia Xf14 - uszkodzenie czujnika ciśnienia Pf15 - uszkodzenie mechanicznego toru sprzęŜenia zwrotnego
f16 - spadek ciśnienia zasilania pozycjoneraf17 - spadek lub wzrost ciśnienia przed lub za zaworem f18 - otwarty lub nieszczelny tor obejścia zaworuf19 - uszkodzenie toru pomiarowego przepływu F.
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
Politechnika Warszawska, Instytut Automatyki i Robotyki
Diagnostyka bieŜącaDiagnostyka bieŜącaWizualizacja uszkodzeń
Politechnika Warszawska, Wydział Mechatroniki
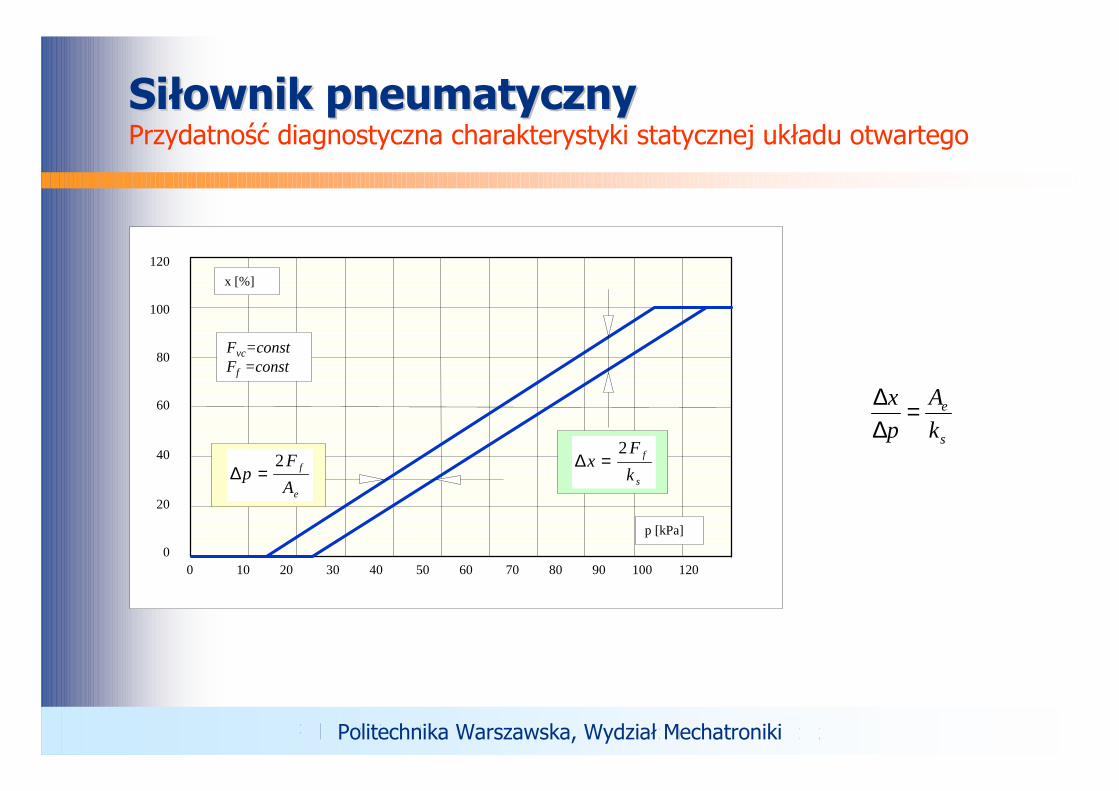
Siłownik pneumatyczny Siłownik pneumatyczny Przydatność diagnostyczna charakterystyki statycznej układu otwartego
0 10 20 30 40 50 60 70 80 90 100 120
120
100
80
60
40
20
0
x [%]
p [kPa]
Fvc=constFf =const
e
f
A
Fp
2=∆ s
f
k
Fx
2=∆
s
e
k
A
p
x =∆∆
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
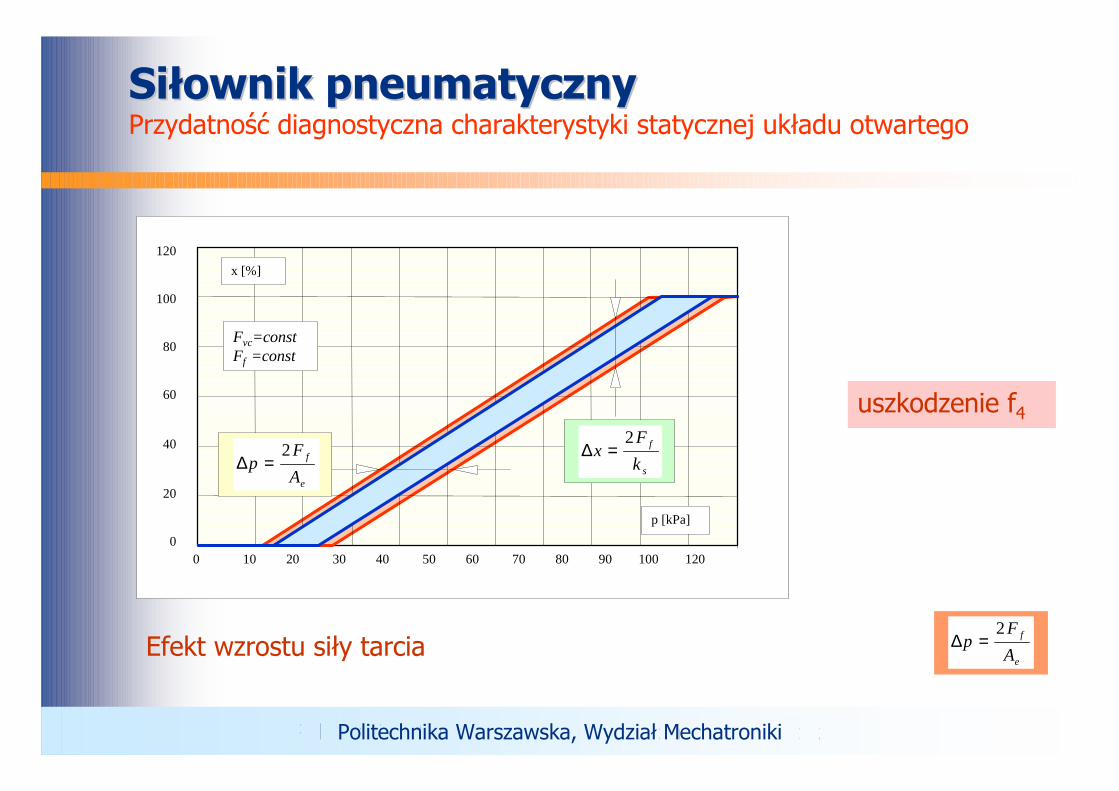
Siłownik pneumatyczny Siłownik pneumatyczny Przydatność diagnostyczna charakterystyki statycznej układu otwartego
0 10 20 30 40 50 60 70 80 90 100 120
120
100
80
60
40
20
0
x [%]
p [kPa]
Fvc=constFf =const
e
f
A
Fp
2=∆ s
f
k
Fx
2=∆
uszkodzenie f4
Efekt wzrostu siły tarcia e
f
A
Fp
2=∆
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Siłownik pneumatyczny Siłownik pneumatyczny Przydatność diagnostyczna charakterystyki statycznej układu otwartego
0 10 20 30 40 50 60 70 80 90 100 120
120
100
80
60
40
20
0
x [%]
p [kPa]
Fvc=constFf =const
e
f
A
Fp
2=∆ s
f
k
Fx
2=∆
uszkodzenie f11
Zmniejszenie sztywności spręŜyny siłownika (np: korozja spręŜyny)s
e
k
A
p
x =∆∆
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Siłownik pneumatyczny Siłownik pneumatyczny Przydatność diagnostyczna charakterystyki statycznej układu otwartego
uszkodzenie f16
Spadek ciśnienia zasilania
0 10 20 30 40 50 60 70 80 90 100 120
120
100
80
60
40
20
0
x [%]
p [kPa]
Fvc=constFf =const
e
f
A
Fp
2=∆
s
f
k
Fx
2=∆
0=∆p
0=∆p
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
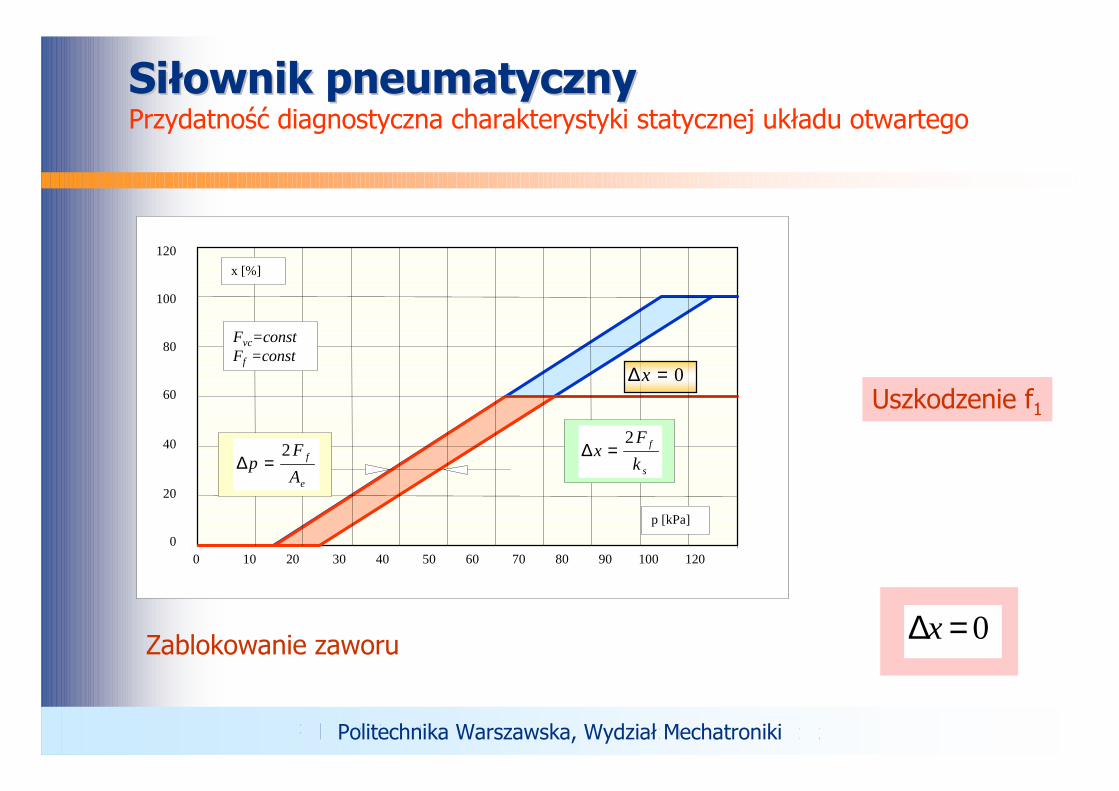
Siłownik pneumatyczny Siłownik pneumatyczny Przydatność diagnostyczna charakterystyki statycznej układu otwartego
Uszkodzenie f1
Zablokowanie zaworu
0 10 20 30 40 50 60 70 80 90 100 120
120
100
80
60
40
20
0
x [%]
p [kPa]
Fvc=constFf =const
e
f
A
Fp
2=∆ s
f
k
Fx
2=∆
0=∆x
0=∆x
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Detektor akustyczny nieszczelności zaworu
Problem detekcji nieszczelności zaworuProblem detekcji nieszczelności zaworuDiagnostyka wbudowana
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
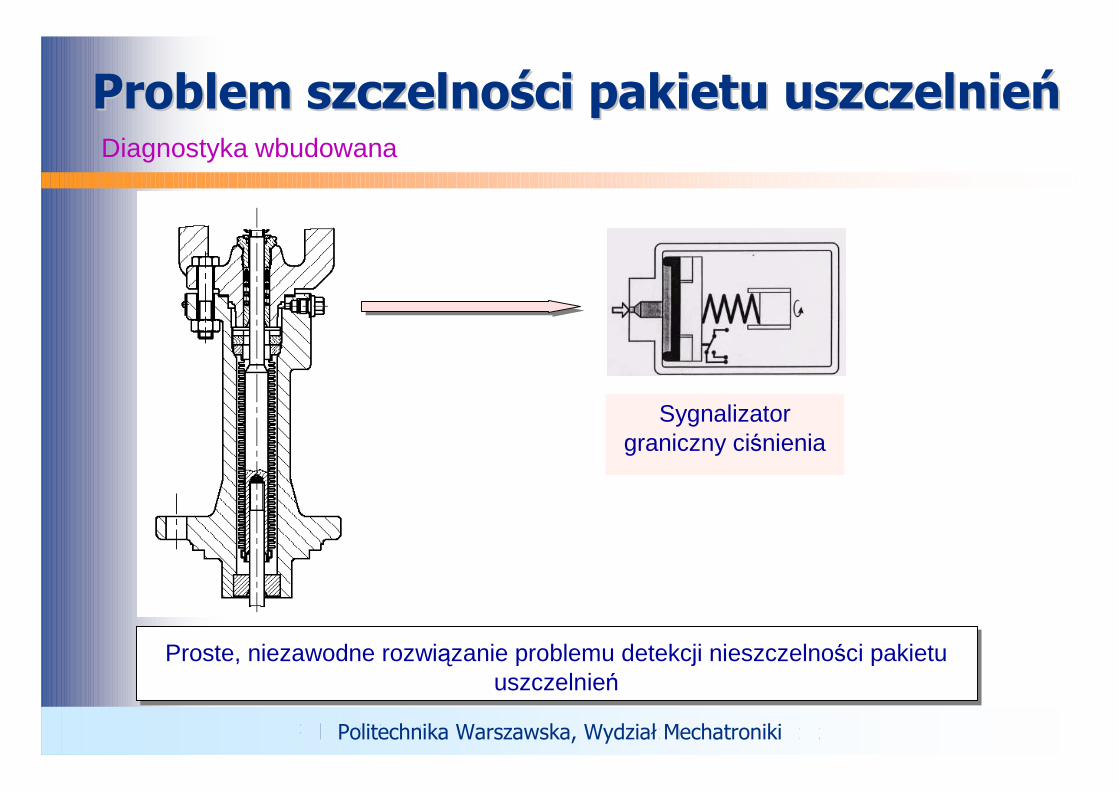
Sygnalizator graniczny ciśnienia
Problem szczelności pakietu uszczelnień Problem szczelności pakietu uszczelnień Diagnostyka wbudowana
Proste, niezawodne rozwiązanie problemu detekcji nieszczelności pakietu uszczelnień
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
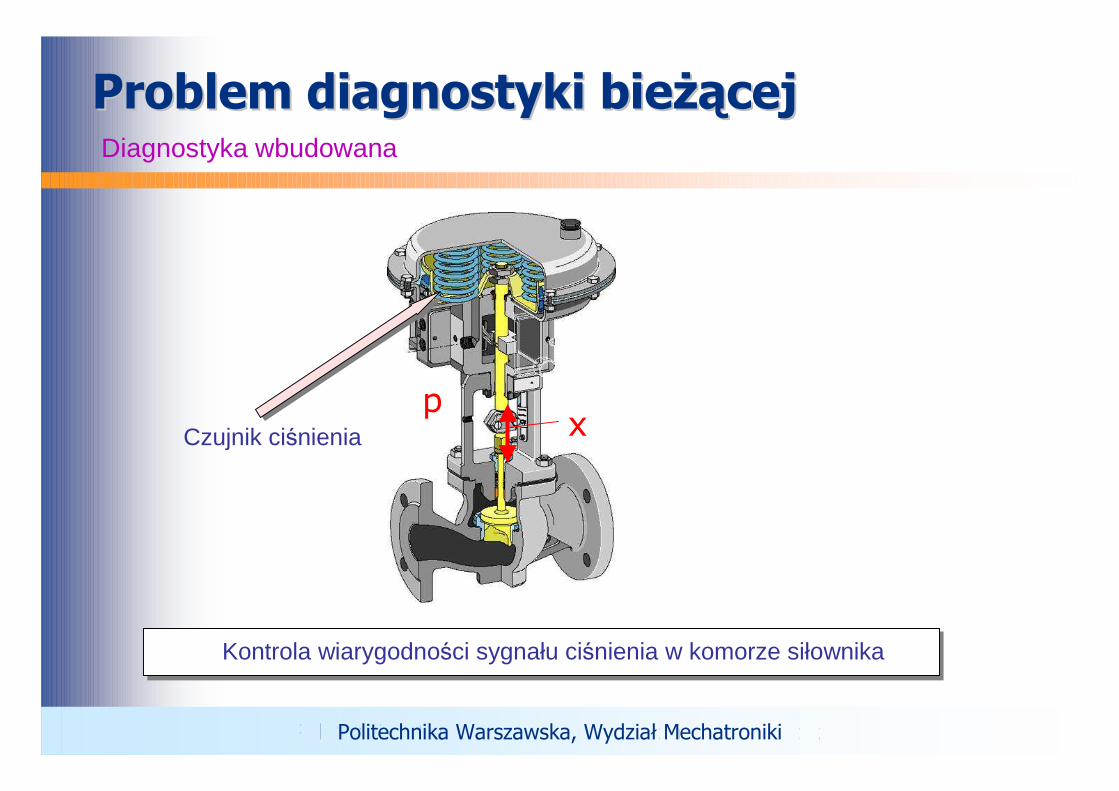
Czujnik ciśnienia
Problem diagnostyki bieŜącej Problem diagnostyki bieŜącej Diagnostyka wbudowana
Kontrola wiarygodności sygnału ciśnienia w komorze siłownika
Politechnika Warszawska, Instytut Automatyki i Robotyki
px
Politechnika Warszawska, Wydział Mechatroniki

Uszkodzenie toru sprzęŜenia zwrotnegoUszkodzenie toru sprzęŜenia zwrotnegoBadania symulacyjne uszkodzenia toru sprzęŜenia zwrotnego w ustawniku
Symulacja układu regulacji automatycznej w stanie z uszkodzeniem toru sprzęŜenia zwrotnego ustawnika pozycyjnego.Zerowy sygnał sprzęŜenia zwrotnego został zastąpiony sygnałem o wartości 100% po czasie 250s.
Układ regulacji działa niepoprawnie. Warunkiem koniecznym kompensacji uszkodzenia toru sprzęŜenia zwrotnego ustawnika jest zachowanie relacji PVp<CV
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Problem tolerancji uszkodzenia toru Problem tolerancji uszkodzenia toru sprzęŜenia zwrotnegosprzęŜenia zwrotnego
Politechnika Warszawska, Instytut Automatyki i Robotyki
Sensor wirtualny
sp
x~p1p2
u
Detektor uszkodzenia
SP
f11Xx~t
p1 x p1 x~
Politechnika Warszawska, Wydział Mechatroniki
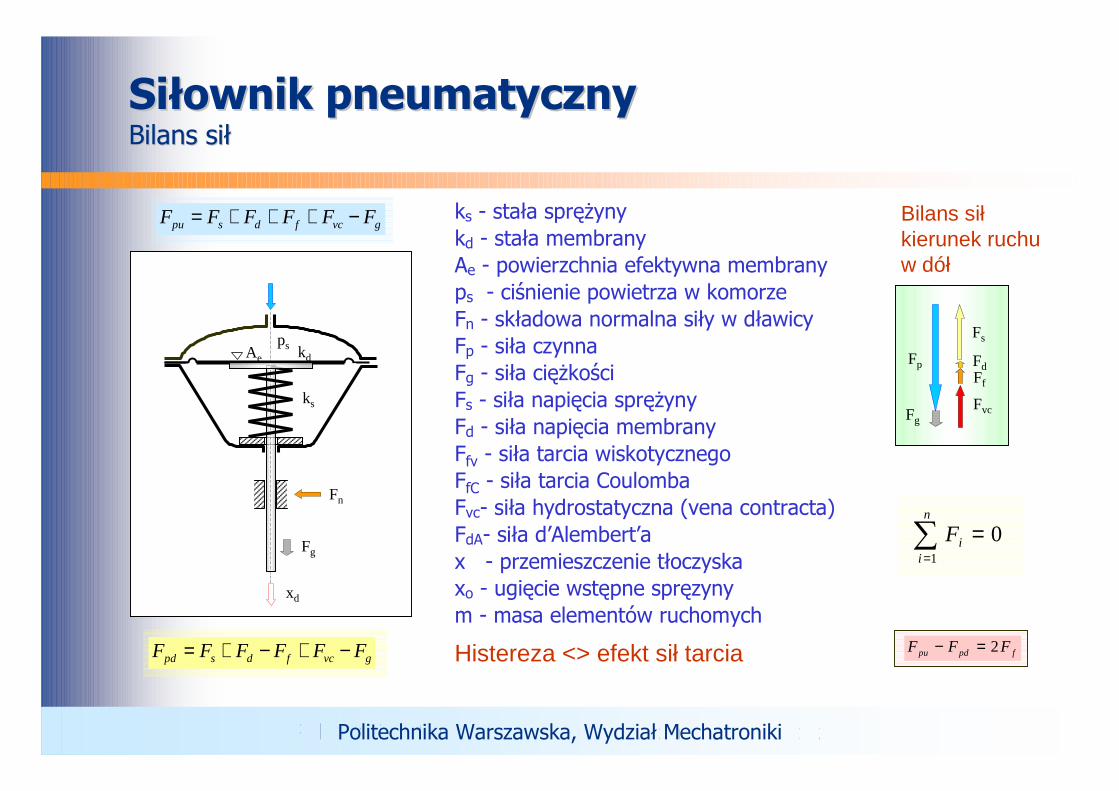
Siłownik pneumatyczny Siłownik pneumatyczny Bilans siłBilans sił
Histereza <> efekt sił tarcia
Bilans sił kierunek ruchuw dół
ps
ks
Ae kd
Fn
xd
ks - stała spręŜyny kd - stała membrany Ae - powierzchnia efektywna membrany ps - ciśnienie powietrza w komorze Fn - składowa normalna siły w dławicy Fp - siła czynna Fg - siła cięŜkościFs - siła napięcia spręŜyny Fd - siła napięcia membrany Ffv - siła tarcia wiskotycznegoFfC - siła tarcia CoulombaFvc- siła hydrostatyczna (vena contracta)FdA- siła d’Alembert’ax - przemieszczenie tłoczyskaxo - ugięcie wstępne spręzynym - masa elementów ruchomych
01
=∑=
n
iiF
gvcfdspd FFFFFF −+−+=
gvcfdspu FFFFFF −+++=
fpdpu FFF 2=−
Fp Fd
Fs
Ff
FvcFg
Fg
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
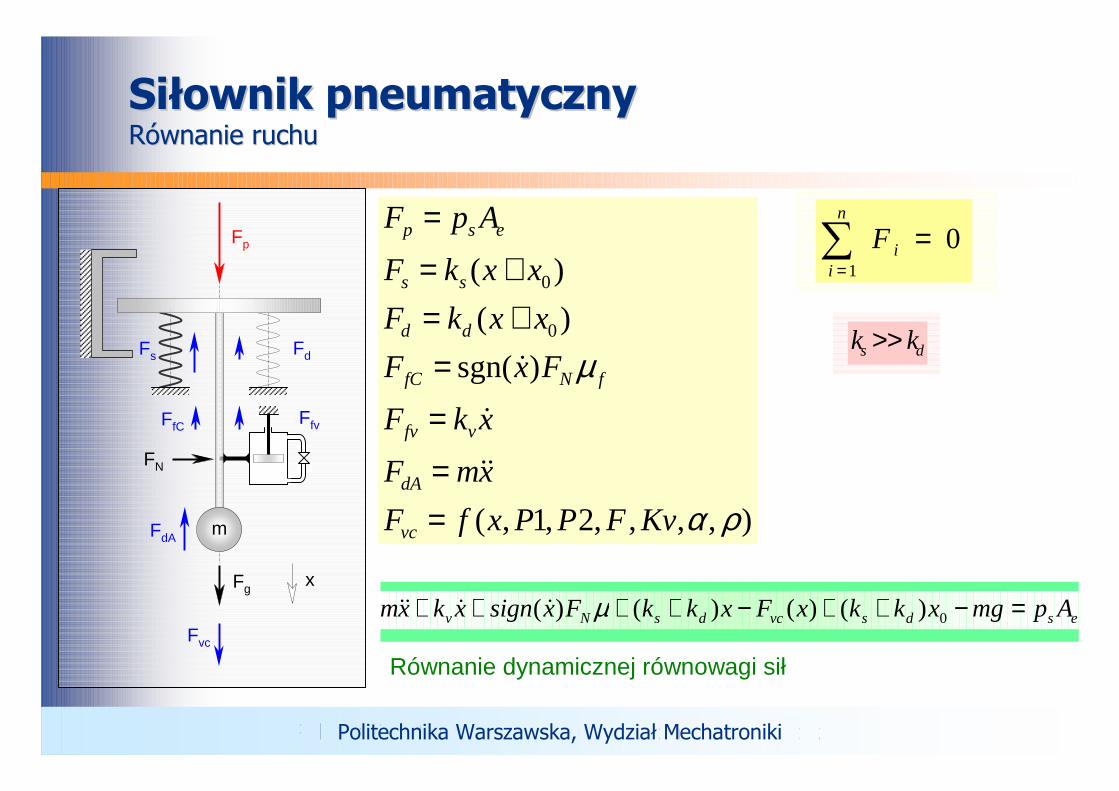
Siłownik pneumatyczny Siłownik pneumatyczny Równanie ruchuRównanie ruchu
Równanie dynamicznej równowagi sił
01
=∑=
n
iiF
m
Fg
Fp
Fs Fd
x
FfvFfC
Fvc
FdA
FN
),,,,2,1,(
)sgn(
)(
)(
0
0
ρα
µ
KvFPPxfF
xmF
xkF
FxF
xxkF
xxkF
ApF
vc
dA
vfv
fNfC
dd
ss
esp
==
=
=+=+=
=
&&
&
&
esdsvcdsNv ApmgxkkxFxkkFxsignxkxm =−++−++++ 0)()()()( µ&&&&
ds kk >>
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki

Symulacja elementu wykonawczegoSymulacja elementu wykonawczegoPrzypadek symulacji sterowania strumienia wody napływowej do kotła energetycznego
Politechnika Warszawska, Instytut Automatyki i Robotyki
Ustawnik Siłownik
f18
f17
f17
f17 - spadek lub wzrost ciśnienia na zaworze
f19 - uszkodzenie przetwornika przepływuf18 - otwarcie zaworów obejściowych
f19Zawór
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
20
30
40
50
60
70
80
90
100
0 5 10 15 20 25 30 35 40
time[s]
X [%
]
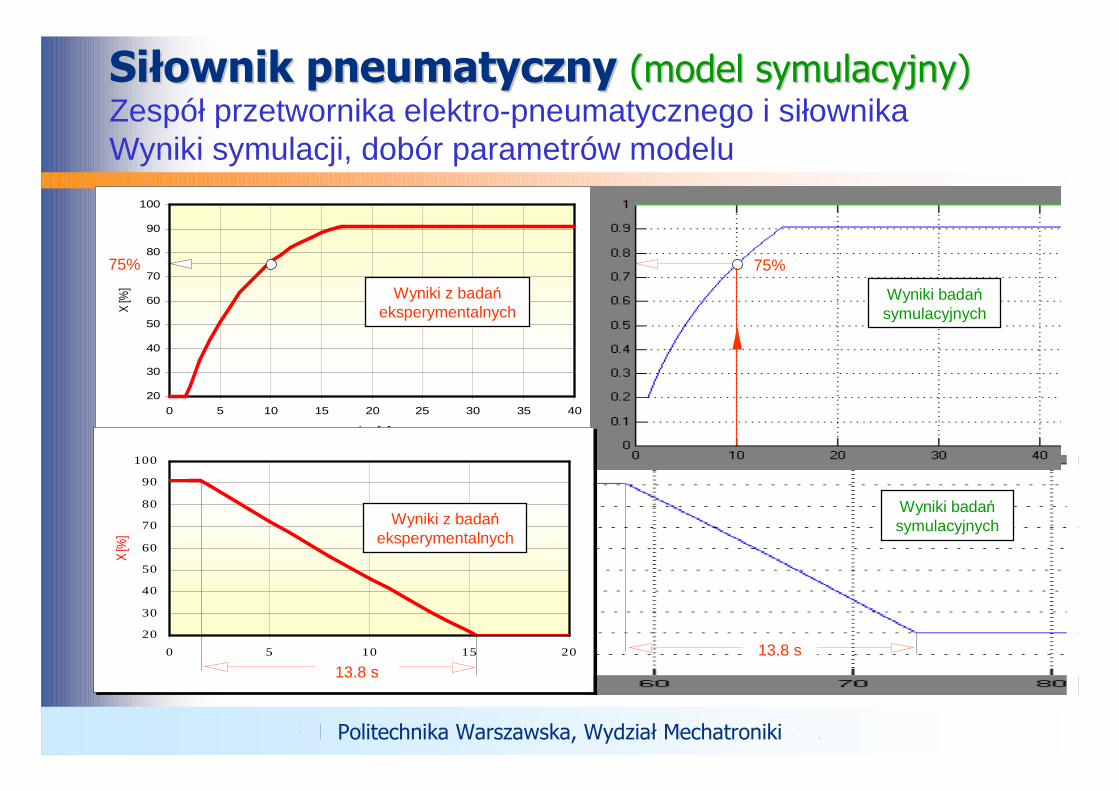
Siłownik pneumatyczny Siłownik pneumatyczny (model symulacyjny)(model symulacyjny)Zespół przetwornika elektro-pneumatycznego i siłownikaWyniki symulacji, dobór parametrów modelu
Wyniki badań symulacyjnych
Wyniki z badań eksperymentalnych
75% 75%
20
30
40
50
60
70
80
90
100
0 5 10 15 20
time[s]
X [%
]
13.8 s13.8 s
Wyniki z badań eksperymentalnych
Wyniki badań symulacyjnych
Politechnika Warszawska, Instytut Automatyki i RobotykiPolitechnika Warszawska, Wydział Mechatroniki
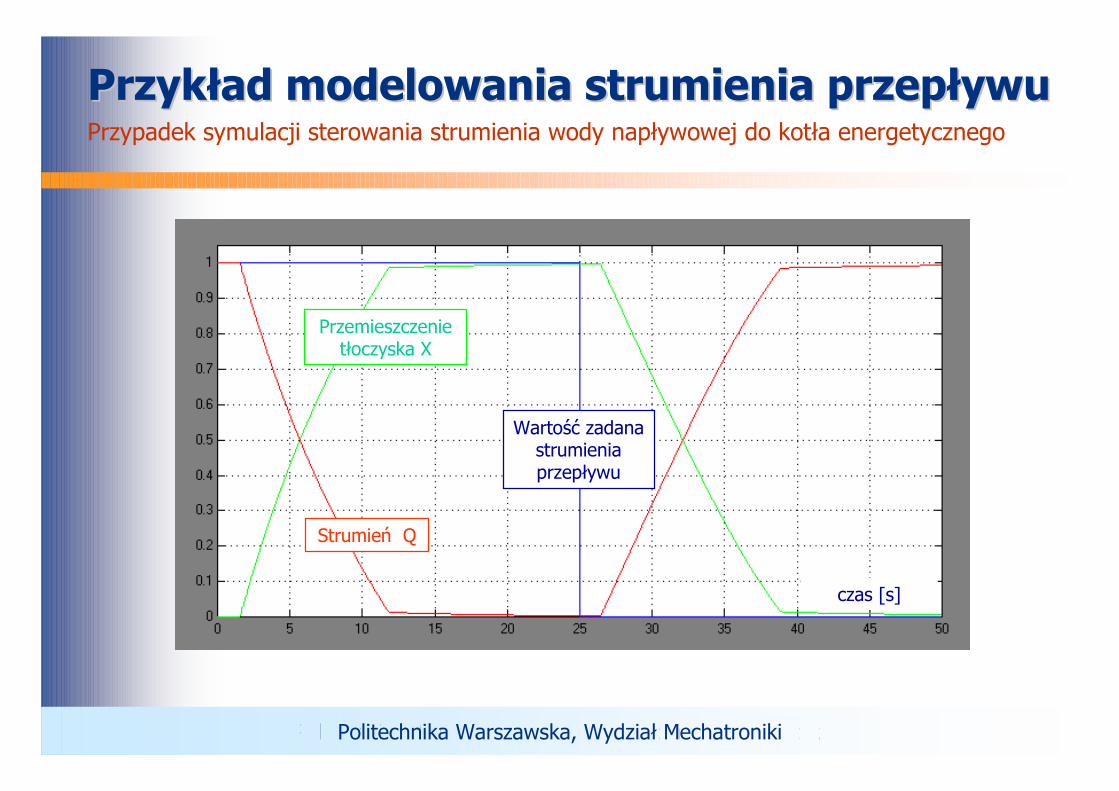
Przykład modelowania strumienia przepływuPrzykład modelowania strumienia przepływuPrzypadek symulacji sterowania strumienia wody napływowej do kotła energetycznego
Politechnika Warszawska, Instytut Automatyki i Robotyki
Strumień Q
Przemieszczenie tłoczyska X
Wartość zadana strumienia przepływu
czas [s]
Politechnika Warszawska, Wydział Mechatroniki
Elementy wykonawczeElementy wykonawczeUwagi końcowe
Politechnika Warszawska, Instytut Automatyki i Robotyki
Współczesne urz ądzenia wykonawcze automatyki:- mają zdolności komunikacyjne (reguła)- mają zaimplementowane zdolności adaptacyjne - samostrojenie (reguła)- mają zdolności do sygnalizacji przekroczeń alarmowych (reguła)- mają zdolności do wnioskowania diagnostycznego w trybie on-line (wyjątkowo)- mają moŜliwość walidacji pomiarów (SEVA) (wyjątkowo)Współczesne urz ądzenia wykonawcze automatyki:- muszą być zgodne z wymaganiami IEC dotyczącymi kompatybilności
elektromagnetycznej (w zakresie odporności i emisyjności) IEC 61000-4-3 - odporność na pole elektromagnetyczneIEC 61000-4-5 - odporność na zakłócenia napięcioweIEC 61000-4-6 - odporność na zakłócenia w paśmie fal radiowychIEC 61000-4-8 - odporność na pole magnetyczneIEC 61000-4-11 - odporność na zaniki zasilaniaIEC 1000-4-2 - odporność na wyładowania elektryczne
- powinny być zgodne z projektem normy IEC 61514-2(ustawniki inteligentne z wyjściem pneumatycznym)
Politechnika Warszawska, Wydział Mechatroniki
Related Documents











