1 ISDSI 2009 Integrated Taxiing and Take-Off Scheduling for Optimization of Airport Surface Operations H.-S. Jacob Tsao, Wenbin Wei, Agus Pratama and Suseon Yang College of Engineering, San Jose State University, San Jose, California, USA Abstract Just like surface transportation systems around the world, air transportation systems experience growing congestion. Airports are the primary bottlenecks of an aviation system, and runways are the primary bottlenecks of an airport. However, traditional capacity expansion approaches like adding runways no longer suffice, due to lack of space, noise and environmental constraints, etc. Therefore, airport operational efficiency becomes more and more critical. Many operational functions have been defined and studied individually in the literature, e.g., runway configuration, runway assignment, take-off sequencing and scheduling, taxiway routing and scheduling, etc. However, a salient feature of airport operations is that these problems are heavily interdependent. Another salient feature of airport surface operations is the vast amount of uncertainty. After a brief discussion of an optimization architecture, we focus on the combined problem of taxiing and take-off scheduling. We report an integrated formulation as a mixed-integer mathematical programming problem and our numerical experience. Key words: Airport Surface Operations, Departure, Optimization, Scheduling, Taxiing 1. Introduction Just like surface transportation systems around the world, air transportation systems experience growing congestion. Although the three-dimensional sky seems to have unlimited capacity for accommodating air traffic, an aircraft must enter or leave the airspace through one of the few available one-dimensional air routes at an airport. Moreover, air routes of an airport may be intertwined with those of neighboring airports. These clearly point to the fact that airports are the primary bottlenecks of an aviation system. However, traditional capacity expansion approaches like adding runways no longer suffice, due to lack of space, noise and environmental constraints, etc. As a result, operational efficiency of the current airports, in particular the runways, becomes more and more critical. Consequently, some researchers studied the efficiency of airport operations (e.g., Idris and Hansman, 2000). Much has been published in the literature about mathematical algorithms that could be used to improve the efficiency of airport surface operations. Many controller tasks and corresponding decision-support functions have been defined and studied in the literature. A salient feature of airport operations is that these problems are heavily interdependent. However, due to the complexity of the problem and perhaps the space limitation, they understandably tend to be focused on sub-problems, with the much larger issue of integration left not fully specified. For example, Anagnostakis et al. (2001) proposed an optimization architecture for airport surface operations, with a focus on departures and runway operations, before formulating and solving the problem of departure sequencing and timing. Capozzi et al. (2004) proposed an

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
ISDSI 2009
Integrated Taxiing and Take-Off Scheduling for
Optimization of Airport Surface Operations
H.-S. Jacob Tsao, Wenbin Wei, Agus Pratama and Suseon Yang
College of Engineering, San Jose State University, San Jose, California, USA
Abstract
Just like surface transportation systems around the world, air transportation systems
experience growing congestion. Airports are the primary bottlenecks of an aviation
system, and runways are the primary bottlenecks of an airport. However, traditional
capacity expansion approaches like adding runways no longer suffice, due to lack of
space, noise and environmental constraints, etc. Therefore, airport operational efficiency
becomes more and more critical. Many operational functions have been defined and
studied individually in the literature, e.g., runway configuration, runway assignment,
take-off sequencing and scheduling, taxiway routing and scheduling, etc. However, a
salient feature of airport operations is that these problems are heavily interdependent.
Another salient feature of airport surface operations is the vast amount of uncertainty.
After a brief discussion of an optimization architecture, we focus on the combined
problem of taxiing and take-off scheduling. We report an integrated formulation as a
mixed-integer mathematical programming problem and our numerical experience.
Key words: Airport Surface Operations, Departure, Optimization, Scheduling, Taxiing
1. Introduction
Just like surface transportation systems around the world, air transportation systems
experience growing congestion. Although the three-dimensional sky seems to have unlimited
capacity for accommodating air traffic, an aircraft must enter or leave the airspace through
one of the few available one-dimensional air routes at an airport. Moreover, air routes of an
airport may be intertwined with those of neighboring airports. These clearly point to the fact
that airports are the primary bottlenecks of an aviation system. However, traditional capacity
expansion approaches like adding runways no longer suffice, due to lack of space, noise and
environmental constraints, etc. As a result, operational efficiency of the current airports, in
particular the runways, becomes more and more critical. Consequently, some researchers
studied the efficiency of airport operations (e.g., Idris and Hansman, 2000).
Much has been published in the literature about mathematical algorithms that could be used to
improve the efficiency of airport surface operations. Many controller tasks and corresponding
decision-support functions have been defined and studied in the literature. A salient feature of
airport operations is that these problems are heavily interdependent. However, due to the
complexity of the problem and perhaps the space limitation, they understandably tend to be
focused on sub-problems, with the much larger issue of integration left not fully specified.
For example, Anagnostakis et al. (2001) proposed an optimization architecture for airport
surface operations, with a focus on departures and runway operations, before formulating and
solving the problem of departure sequencing and timing. Capozzi et al. (2004) proposed an
2
ISDSI 2009
initial architecture and core functions for a basic automated airport surface traffic planning
and control system and presented several algorithms and preliminary numerical results.
Another salient feature of airport surface operations is the vast amount of uncertainty. In
addition, the capacity of most large airports in the US is constrained by the runway capacity,
which is “perishable.” Based on these salient features, the authors of this paper (2008)
proposed an optimization architecture for airport surface operations and discussed its
justification. We also defined a set of interdependent decision-support functions for optimal
planning and control of airport surface operations, with the goal of fully utilizing the runway
capacity in the presence of much uncertainty.
After a brief discussion of an optimization strategy proposed by the authors (2008), we focus
on the integrated function of taxiing and take-off scheduling. Although this integrated
function is to be achieved through both operations planning, which deals with a longer time
frame and quantities more aggregated with respect to time, and control, which deals with a
shorter time frame and quantities less aggregated. Due to space limitation, we focus on the
control portion of the integrated function and report an integrated formulation as a mixed-
integer mathematical programming problem and our numerical experience in the solving the
problem. This paper is organized as follows. In section 2, we define the focus of this paper
after a brief discussion of an optimization strategy. The problem is formulated in Section 3.
In Section 4, we discuss our implementation of the formulation and numerical experience.
Concluding remarks are given in Section 5.
2. An Optimization Strategy and the Focus of this Paper
Some researchers characterize the operations of an airport as a set of “controlled queues.”
Among all these controlled queues, the runway queues, created by demand that cannot be met
immediately by the capacity, have been observed to be the biggest source of delay (Idris and
Hansman, 2000). In fact, a salient feature of airport surface operations is that runway
capacity is the most common root cause of all these queues. As pointed out in (Cheng, 2004),
as more and more runways are constructed on an airport, the traffic congestion on the
taxiways may become so serious that it could limit the airport’s ability to fully utilize its
runway capacity. When this is a likely result of adding another runway to an airport and the
taxiway capacity cannot be increased, either through deployment of advanced technology or
conventional expansion projects, the benefit of the addition should be questioned. In any
event, optimal utilization of runways is the primary goal. Another salient feature is that many
of the operational functions are interdependent. This primary goal is to be achieved by
integration of not only operational functions like taxiway and take-off scheduling but also
integration of operations planning and control. Another salient feature of airport surface
operations is the vast amount of uncertainty. Recurrent sources of uncertainty include aircraft
departure delay from the gate, congestion at runway entrances and on taxiways, variability in
performance of humans (including tower controllers and pilots), variability in aircraft
performance, etc. The first two sources are the two primary recurrent sources in current
operations. Other sources of uncertainty include non-recurrent sources, e.g., the impact of
inclement weather on airport capacity, etc.
3
ISDSI 2009
One way to deal with the various uncertainty sources is to distinguish control functions from
planning functions, which include operational, tactical and strategic planning functions.
Integrated taxiway and take-off scheduling involves both control and operational planning.
We first describe the approach, in terms of systems requirements.
Control refers to the collective instructions of tower controllers issued to the pilots of those
aircraft that are ready to depart from the gate. Effective control can also reduce or virtually
eliminate another source of uncertainty – congestion at runway entrances or on taxiways.
Therefore, effective control can be used as a strategy to deal with the two major sources of
uncertainty. The control problem is formulated as a deterministic optimization problem, with
some operational remedies in anticipation of variability of human ability. The overall
objective of the control problem is to minimize the total amount of time all aircraft spend on
the airport after pushback readiness, particularly the total amount of time all aircraft spend on
the tarmac of an airport. This objective helps avoid congestion on the airport surface by
keeping some aircraft waiting at their gates or parking aprons. Congestion avoidance not only
reduces delays but also enables smooth travel and avoids stopping or even slow-down, which
incurs unnecessary fuel burn, noise, emissions, etc. More importantly, congestion avoidance
significantly reduces and perhaps virtually eliminates a major source of uncertainty. This
overall objective helps achieve system optimality. But, to balance system optimality with
“individual optimality,” constraints to avoid excessive delay to individual aircraft are imposed
to ensure fairness.
The smooth travel is to be enabled even through all taxiway-to-taxiway intersections, but not
through runway-to-taxiway intersections, i.e., runway crossings, or at runway entrances. A
conflict at a taxiway crossing between two aircraft can be easily avoided or its impact easily
recovered by controlling the two speed profiles. However, a conflict at a runway crossing
often necessitates aircraft waiting because a runway when occupied for take-off or landing
may not be crossed for a significant amount of time. This necessitates a small queue for
runway crossings. Another kind of queues is necessary. The primary traffic bottleneck is the
runways. To avoid wasting the perishable runway time slots for departures, a small queue at a
runway entrance can be provided in order to deal with possible inability of the controllers or
pilots to adhere to the schedule developed by the deterministic optimization process. The
authors (2008) proposed the following optimization strategy:
• Deterministic Control of Movement Only for Aircraft Ready for Pushback
o Objective of minimum time on airport: Control movement of departing aircraft
that are ready for pushback and arriving aircraft so as to minimize in a
deterministic mathematical program the total amount of time departing aircraft
spend on the airport between pushback readiness and take-off plus the total
amount of time arriving aircraft spend between landing and parking.
o Smooth-travel constraint: Control aircraft movement on tarmac in the same
mathematical program so as to ensure smooth travel and no or little tarmac
congestion by imposing constraints on minimum speed or maximum travel time
between the gate and the runway and keeping departing aircraft at their gates or on
parking aprons as long as possible (subject to gate availability), and hence to also
4
ISDSI 2009
virtually eliminate one of the major sources of uncertainty - recurrent tarmac
congestion.
o Fairness constraint: Imposing fairness constraints in the same mathematical
program, which may take the form of requiring the delay to any aircraft to be no
greater than a specified percentage over the average delay to all aircraft.
• Operations Planning in Anticipation of Uncertainty or Deviation from the Deterministic
Control
o Queueing to maximize runway and related throughputs: Maintain a small queue in
the same mathematical program at a runway entrance and allow a small queue at a
runway-taxiway crossing in anticipation of deviation of actual traffic from the
deterministic control, due to human factors, and in order to avoid wasting take-off
slots, which are perishable. However, determine the queue sizes according to
aggregated forecast demand in a planning function.
o Reordering actual sequence of arrival at runway: Reorder the sequence in which
aircraft actually arrived at a runway so that the take-off sequence maximizes the
runway capacity, with wake vortex and departure fixes taken into consideration, if
the airport is equipped with a holding point enabling such reordering and
deterministically optimized sequence did not materialize due to uncertainty.
This paper focuses on the control function. It further focuses on airports that are equipped
with independent runways, so that the only air separation to consider is the separation
between two aircraft taking off at the same runway and not air separation of aircraft taking off
at different runways, and equipped with a holding space for each runway, so as to
accommodate a small queue. In addition, it focuses on airports that are equipped with
perimeter taxiways and do not use runway crossings, for safety purposes. The mathematical
formulation reported in this paper is a major extension to the formulation proposed by
Smeltink et al (2004) for the problem of taxiway scheduling. The extension includes:
integration with other functions of an optimization architecture, integration with take-off
scheduling, small queue at a runway holding space, encouraging aircraft to wait in the small
queue and at the gate, fairness to individual aircraft with respect to wait time at the gate,
accommodation of the Ground Delay Program at the national or inter-airport level, etc. We
have further extended the formulation reported in this paper to deal with more complex
situations, e.g., reordering aircraft sequence of arrival at runway for a different and more
efficient take-off sequence for airports equipped with the necessary infrastructure, but will be
reported separately.
3. Formulation of a Mixed Integer Programming Problem
3.1 Given Input and Parameters
3.1.1 Aircraft and Demand
• A : the set of all aircraft i=1,2,…,a.
• oA : the set of all aircraft plus one dummy aircraft 0.
• DepA : the set of all departing aircraft.
• ArrA : the set of all arriving aircraft.
• Dep
GDPA : the set of all aircraft that are subjects of the Ground Delay Program (GDP).
5
ISDSI 2009
• [ ii GDPLGDPE , ],Dep
GDPAi ∈∀ : the time interval within which aircraft i must take off from
this airport, as required by the Ground Delay Program (GDP), where the E and L signify
earliest and latest time of take-off.
• iARTAXI , ArrAi ∈∀ (arrival readiness for taxiing): the time at which an arriving flight i is
to have landed and reached the end of the runway and to be taxied off immediately.
• iDRPUSH , DepAi ∈∀ (departure readiness for pushback): the time at which departing
aircraft i is ready for pushback.
3.1.2 Airport Configuration
• R: the set of all departing runways at the airport, with the total number of departing
runways denoted as Γ .
• N: the set of all real nodes u, where a real node could be the intersection of two taxiways
or runways or could simply be an entrance to a taxiway or to a runway.
• },...,1|{ , rlr
q
rclqN =≡ , for all runway r=1,2,…, Γ : a sequential set of artificial or nodes
defined to represent the rc sequential qeueuing slots accommodated by the holding space
equipped at the entrance to the runway r, with 1,rq denoting the first queueing slot after the
entrance to the holding space and rcrq , denoting the actual physical entry point to runway
r, i.e., runway entrance. We refer to rc as the capacity of the small queue allowed for
runway r or the capacity of the holding space for runway r.
• q
rr
q NNΓ=
∪≡,...,1
• L: the set of all links l, where a link is any paved surface intended for the purpose of
aircraft taxiing.
• ),( LNNG q∪≡ : the taxiing network.
3.1.3 Surface Aircraft Operations
The given route for an aircraft consists of two parts: a sequentially ordered set iR of real
nodes, from the starting node on the network G to the entrance to the holding space of the
assigned runway, and another set of sequentially ordered set q
iR of artificial nodes, which
represent the sequential queueing slots of the holding space for the assigned runway.
• iR , for all aircraft i: physical taxi route for aircraft i , from its first real node to its last real
node, i.e., the entrance to the holding space of the assigned runway. There are two
representations. iR can be represented by an ordered set of ik nodes }...,,{ ,21
i
k
ii
iuuu starting
with the first node of the route, progressing through the intermediate nodes and ending
with the entrance to the holding space of the assigned runway, where ik denotes the total
number of real nodes involved in iR . It can also be represented by a set of ordered
1−ik links }...,,{ 1,21
i
k
ii
illl
−starting with the first link of the route, progressing through the
intermediate links and ending with the last link of the route, where 1−ik is the number of
links involved in iR and link i
jl , j=1,2,…, 1−ik , is defined to be the ordered set ),( 1,
i
j
i
juu
+.

6
ISDSI 2009
• q
iR , for all aircraft i: the artificial extension of the physical taxi route iR for aircraft i
beyond the entrance to the holding space of the assigned runway, from its first queueing
slot to its last queueing slot, i.e., the runway entrance. It also has two representations. For
all aircraft assigned to runway r, r=1,2,…, Γ , q
iR is represented as { }rcrrr qqq ,2,1, ,...,, . It
can also be represented by a set of ordered 1−rc links:
{ }),(),...,,(),,( ,1,3,2,2,1, rr crcrrrrr qqqqqq − . Note that, for convenience, 0,rq is used to denote the
entrance to the holding space of runway r. Note that this entrance is a real and physical
node and it has already been defined as a node in N and as the last node i
kiu of iR .
• )(iγ , for all aircraft i: the runway assigned to aircraft i.
• uA , for all real nodes u: the set of all aircraft whose taxi route pass through node u.
• 0
uA , for all real nodes u: the union of the set of all aircraft whose routes pass through node
u and the set of the dummy aircraft, i.e., }0{0 ∪≡ uu AA .
• ijS , for all ordered aircraft pair i and j: required safe separation time at take-off (calculated
from distance, if necessary) of aircraft i from its immediate trailing aircraft j.
3.1.4 Other Parameters Used in Formulation
• gW : The weight assigned, for calculating the objective function, to the time a departing
aircraft spends at the gate. This weight should be between 0 and 1, inclusively, in order to
keep an aircraft waiting at the gate, rather than on the tarmac.
• qW : The weight assigned, for calculating the objective function, to the time a departing
aircraft spends in the small queue before the runway entrance. This weight should be
between 0 and 1, inclusively, in order to encourage departing aircraft to fill up the small
queue, Also, qW should be no greater than gW .
• M: The big-M, used as a device to include appropriate constraints, in order to ensure
consistency between the values of binary variables and the values of real-valued variables.
3.2 Decision Variables
• iut (non-negative real variable), for all aircraft i and for all real or artificial nodes u on its
route: the time at which aircraft i reaches node u. Note aircraft does not slowdown, let
alone stop, and continues on after reaching a node, in order to achieve smooth travel,
unless the node is a runway entrance (or runway crossing). Also note that some of the
nodes may be the artificial nodes representing queueing slots at a runway holding space.
• r
it (non-negative real variable), for all departing aircraft i: time at which aircraft i is to be
released at a runway entrance (i.e., the last queueing slot at the holding space for a
runway) and to enter the corresponding runway for take-off. The (artificial) node at which
the aircraft takes off from is implicit; it is )(),( ici
qγγ .
r
it can also be denoted as r
iqici
t)(),( γγ,
when explicit reference to the runway entrance is helpful.
• ijux (binary variable, about immediate predecessor), for all nodes u and all aircraft i and j
such that 0
uAi ∈ , 0
uAj ∈ and ji ≠ : ijux = 1 if any only if aircraft i reaches node u
7
ISDSI 2009
immediately before aircraft j does; ijux = 0 otherwise. If aircraft j is the first aircraft to
reach node u, then set 10 =jux . If aircraft i is the last aircraft to reach u, then set 10 =uix .
We use a square binary matrix to specify these relationships between aircraft, with
the0
uA being the range for both the row index i and column index j. This matrix has a
unique feature in that all its column sums and all its row sums are 1.
• ijuy (binary variable, about predecessor), for all nodes u and all aircraft i and j such that
0
uAi ∈ , 0
uAj ∈ and ji ≠ : ijuy = 1 if any only if aircraft i reaches node u before aircraft j
does; ijuy = 0 otherwise.
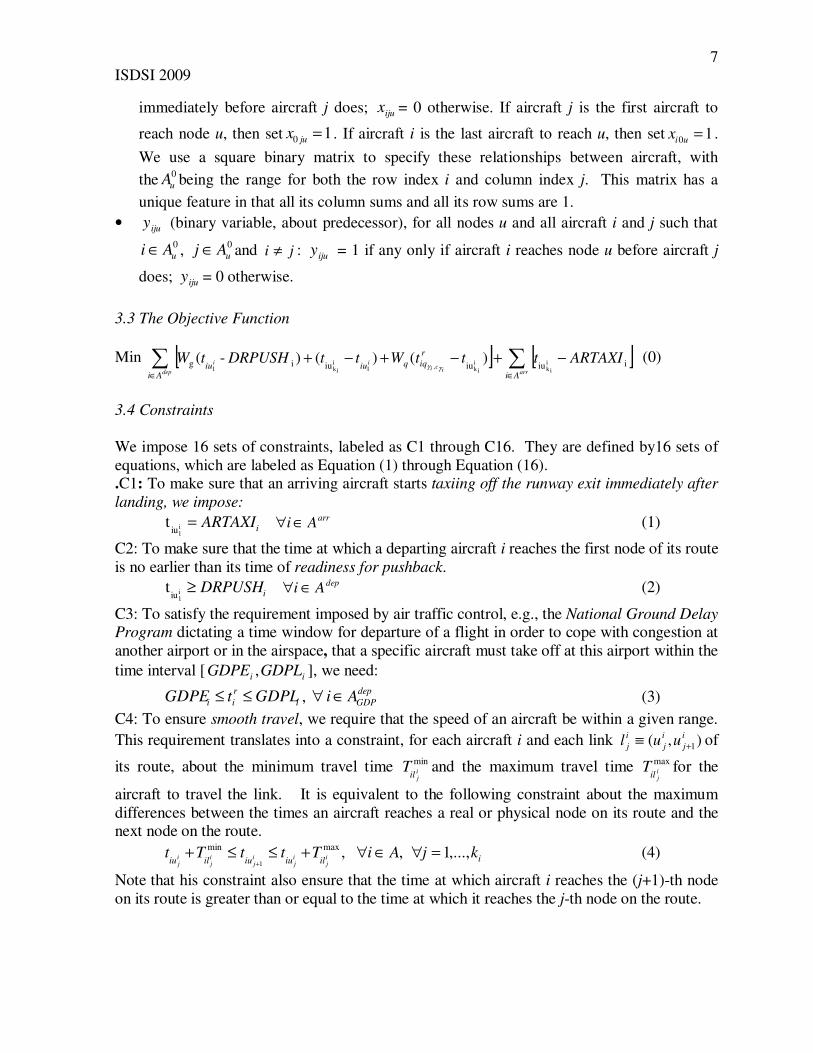
3.3 The Objective Function
Min [ ] [ ]∑∑∈∈
−+−+−+arrdep i
ciii
AiAi
r
iqqiuiuARTAXItttWttDRPUSHtW iiuiuiuig i
iki
ik,1i
ik1
)()()-(γγ
(0)
3.4 Constraints
We impose 16 sets of constraints, labeled as C1 through C16. They are defined by16 sets of
equations, which are labeled as Equation (1) through Equation (16).
.C1: To make sure that an arriving aircraft starts taxiing off the runway exit immediately after
landing, we impose:
iARTAXI=i1iu
t arrAi ∈∀ (1)
C2: To make sure that the time at which a departing aircraft i reaches the first node of its route
is no earlier than its time of readiness for pushback.
iDRPUSH≥i1iu
t depAi ∈∀ (2)
C3: To satisfy the requirement imposed by air traffic control, e.g., the National Ground Delay
Program dictating a time window for departure of a flight in order to cope with congestion at
another airport or in the airspace, that a specific aircraft must take off at this airport within the
time interval [ ii GDPLGDPE , ], we need:
i
r
ii GDPLtGDPE ≤≤ , dep
GDPAi ∈∀ (3)
C4: To ensure smooth travel, we require that the speed of an aircraft be within a given range.
This requirement translates into a constraint, for each aircraft i and each link ),(1
i
j
i
j
i
juul
+≡ of
its route, about the minimum travel time minijil
T and the maximum travel time maxijil
T for the
aircraft to travel the link. It is equivalent to the following constraint about the maximum
differences between the times an aircraft reaches a real or physical node on its route and the next node on the route.
,maxmin
1ij
ij
ij
ij
ij iliuiuiliu
TttTt +≤≤++
ikjAi ,...,1, =∀∈∀ (4)
Note that his constraint also ensure that the time at which aircraft i reaches the (j+1)-th node
on its route is greater than or equal to the time at which it reaches the j-th node on the route.

8 ISDSI 2009
To ensure against overtaking, i.e., no one aircraft passing another on the same link, and head-on collision, i.e., two aircraft traveling on the same link but in opposite directions, we need to
impose additional constraints. However, some of these constraints are applicable if and only if an aircraft precedes another in reaching a node. Therefore, for each node u of the network
G, we defined earlier in this section precedence relationships ijuy , for all the aircraft i and j
whose routes do include the node u in their times of reaching node u. These relationships can
be defined via immediate-precedence relationships ijux . However, ijux must be defined in
such a way that they are consistent with the times iut and jut of aircraft i and j reaching node u.
Therefore, we must impose the following constraints. Note that since ijux relates two aircraft,
we use the concept of a dummy aircraft, to signify whether an aircraft is the first aircraft to reach a node (on its taxi route) as well as to signify whether an aircraft is the last aircraft to
reach a node (on its taxi route). The dummy aircraft is represented as aircraft 0, and the set of
this dummy aircraft and all real aircraft has been denoted as }0{0 ∪= AA .
C5: Definition of Immediate Predecessors:
10
=∑∈ uAi
ijux 0, uAjNu ∈∀∈∀ (5.1)
10
=∑∈ uAj
ijux 0, uAiNu ∈∀∈∀ (5.2)
Mxtt ijuiuju )1( −−≥ }{\,, iAjAiNu uu ∈∀∈∀∈∀ (5.3)
Mxtt ojujuiu )1( −−≥ }{\,, jAiAjNu uu ∈∀∈∀∈∀ (5.4)
Mxtt ioujuiu )1( −−≥ }{\,, iAjAiNu uu ∈∀∈∀∈∀ (5.5)
In addition, ijuy must be defined in such way that they are consistent with ijux . To ensure this
consistency, we must impose the following two sets of constraints:
C6: Definition of Predecessors:
ijuiju xy ≥ }{\,, 00 iAjAiNu uu ∈∀∈∀∈∀ (6.1)
ojujiu xy ≥ }{\,, jAiAjNu uu ∈∀∈∀∈∀ (6.2)
1≤+ ijuoju yx }{\,, jAiAjNu uu ∈∀∈∀∈∀ (6.3)
ioujiu xy ≥ }{\,, iAjAiNu uu ∈∀∈∀∈∀ (6.4)
1≤+ ijuiou yx }{\,, iAjAiNu uu ∈∀∈∀∈∀ (6.5)
1−+≥ kiuijukju yxy },{\},{\,, jiAkiAjAiNu uuu ∈∀∈∀∈∀∈∀ (6.6)
C7: In terms of ijux and ijuy , the following constraint prevents overtaking:
,0=− ijviju yy ji RRvuijAjAi ∩∈∀≠∈∈∀ ),(,,, (7)
C8: The following constraint prevents head-on collision of two aircraft in a link (u,v):
0=− ijviju yy ji RuvRvuitsvuijAjAi ∈∈∀≠∈∈∀ ),(&),()(..),(,,, (8)
It is critical to note that (u,v) and (v,u) should be treated as two separate cases although they represent the same physical link.
C9: Aircraft must be separated for safety. Not only must aircraft on the same link be separated, aircraft traveling on two links and approaching the same node must also be

9 ISDSI 2009
separated. It turns out that the requirement of separation of two aircraft on a link can be achieved by separating the two aircraft with respect to the end node of the link. This
requirement can be combined with the separation requirement for two aircraft traveling on two different links (with a common end node) to constitute the following “node-separation”
constraints:
Mystt ijuiuiuju )1( −−+≥ }{\,, iAjAiNu uu ∈∀∈∀∈∀ (9.1)
where ius is the separation time between any aircraft i traveling on a link (u,v) from any
following aircraft j that can reach the start node u of the link and therefore
)(),()/(),(
iuiv
sep
iuiv
sep
iu ttvuD
D
ttvuD
Ds −=
−= (9.2)
where sepD denotes the requirement distance separation between two aircraft and
),( vuD denotes the distance of link (u,v). Therefore, the constraint can be expressed as
MyttvuD
Dtt ijuiuiv
sep
iuju )1()(),(
−−−+≥ , }{\,, iAjAiNu uu ∈∀∈∀∈∀ (9.3)
C10: The small queue at a runway has a limited capacity, and the capacity can be modeled as
a sequence of virtual links that have zero length. Note that the sequence of aircraft reaching
the different sequential queueing slots does NOT change because the holding point is
provided only to allow a small queue, not to enable re-sequencing of aircraft for better runway
throughput. Therefore, we impose
Mxttrrkrk ijqiqjq )1(
01−−≥
+,
1,...,1,0,)()(..,,, −=∀==≠∈∈∀ r
DepDep ckrjitsijAjAi γγ (10)
where 0rq is a real node and is the entrance to the holding space of runway r. Recall that this
artificial node 0rq was defined for convenience.
C11: We impose the following constraint to ensure that the release time for departing aircraft
i is no sooner than when it reaches the runway entrance, which is the last queueing slot of the
assigned runway:
rrcrrc iq
r
iq tt ≥ , )(; irAi Dep γ=∈∀ (11)
C12: Departing aircraft must be safely separated in the air. Therefore, the following
constraint is critical:
MxSttirrcrrc ijqij
r
iq
r
jq )1()(0γ
−−+≥ , rjitsijAjAi DepDep ==≠∈∈∀ )()(..,,, γγ (12)
C13: If an aircraft is released for take-off at a particular time at the runway entrance, i.e., the
last artificial node (or queueing slot) of the assigned runway, its immediate follower cannot
reach the runway entrance any earlier. This is ensured by the following constraint:
Mxttrrrcrrc ijq
r
iqjq )1(0
−−≥ rjitsijAjAi DepDep ==≠∈∈∀ )()(..,,, γγ (13)
C14: To ensure that the time at which a departing aircraft i reaches queueing slot k+1 is not
earlier the time at which it reaches queueing slot k, we impose the following constraint:
rkkr iqiqtt ≥
+1, 1,...,1,0),(, −=∀=∈∀ r
Dep ckirAi γ (14)
C15: Finally, we impose the following fairness constraint to ensure that the amount of time any departing aircraft waits at the gate after readiness for pushback is within a specified
percentage of the average of such amounts across all the departing flights.

10 ISDSI 2009
dep
kkuAk
iiuA
DRPUSHt
PDRPUSHt
k
dep
i
)(
)1(1
1
−
+≤−
∑∈ , DepAi ∈∀ (15)
C16: Binary and non-negativity constraints: +∈Rtiu
q
ii
Dep RRuAi ∪∈∀∈∀ , and i
Arr RuAi ∈∀∈∀ , (16.1)
+∈Rt r
i DepAi ∈∀ (16.2)
}1,0{, ∈ijuiju yx ijAjAiNu uu ≠∈∈∀∈∀ ,,, 00 (16.3)
4. Implementation and Numerical Experience
We used ILOG-CPLEX to solve the problem on a Lenovo laptop computer with an Intel Core
Duo T7500 processor, which can allocate up to 2 Giga-bytes of RAM and has a
computational speed of 2.2 Giga-hertz. In this section, we report some numerical experience.
We used the two parallel runways on the east side of the Dallas-Fort Worth International
Airport (DFW), the three terminals on the east side of the six-terminal complex, and the
taxiways connecting the two runways and the three terminals as the physical test network,
with the runway closer to the terminals dedicated to departures and the one farther from the
terminals dedicated to arrivals. This pair of runways constitute approximately one quarter of
the capacity of DFW, which is one of the largest airports in the US and is the largest hub for
American Airlines. The taxiways are modeled with 41 nodes and 70 links. The size of the
small queue at the departure runway is 1. We first discuss the performance of the base case
and then discuss the impacts of changes in some key parameters on the performance,
particularly the execution time.
The base case includes the following parameter values: To encourage filling-up and waiting
in the small queue, qW is set to 0.5. To encourage waiting at the gate, gW is set to 0.75. The
speed is set at 20 feet per second (i.e., 13.64 miles per hour or 21.95 kilometers per hour),
which is a good representation of the nominal speed during taxiing in uncongested conditions
for all aircraft types. The demand consists of 10 departing flights and 5 arriving flights. We
used the shortest paths as their routes. A route may involve 3 links to 9 links. This demand
level is consistent with the day-time demand at DFW within a 30-minute planning window.
These result in a mixed-integer programming problem of 1101 binary variables, 132 real-
valued variables, 7538 functional constraints involving binary variables, and 219 functional
constraints involving only real-valued variables. (These do not include the non-negativity or
binary constraints.) The optimal solution is reached with an execution time of approximately
5 minutes. It is important to note that we also observed that a good integer solution with an
objective value within 0.5% of the optimal objective value was reached within 10 seconds.
When qW is set to a small value, e.g., 0.01, the execution is very fast, with the optimal
solution found in about 3 seconds. At this qW , the problem virtually becomes a taxiing
scheduling problem alone, without integration with take-off scheduling. This is because the
negligible weight leads to a negligible objective-function coefficient of 0.01 for aircraft take-
off (or release) times r
it . The two-orders-of-magnitude increase in execution time is the price

11
ISDSI 2009
for integrated optimization for both taxiway scheduling and take-off scheduling. The
improvement in the total amount time spent by the departing aircraft on the tarmac (i.e.,
between pushback and take-off) however is 9.27%, which is very significant.
We tested the performance of extensions to the base case, with a different value for one
parameter at a time. For example, we tested the formulation against higher demand levels:
125% and 150% of the base-case demand level. The execution time for the two levels are
approximately 3 hours, and 4.5 hours, respectively. It is evident that the execution time grows
very fast with respect to the demand level. This is because of the much larger number of
binary variables to “branch-and-bound” and, more importantly, the much larger number of
possible combinations of taxiing schedules and take-off schedules to search. We also observe
that higher the taxiing speed tend to lead to longer execution time. Also, the wider the
possible speed range, the longer the execution time. The cause, we believe, is the larger
number of possible choices for the combined problem of taxiway scheduling and take-off
scheduling. We also attempted tests against larger networks, e.g., another pair of runways at
DFW together with the three terminals on the west side of the six-terminal complex and the
relevant taxiways. However, the branch-and-bound processes were halted due to insufficient
RAM. This should not be a real problem for real-world implementation, which should occur
on a main-frame computer or special-purpose processors.
5. Conclusion
In existing literature, taxiing scheduling is typically formulated to minimize total time aircraft
spend on taxiways or total delays with respect to a given set of scheduled take-off times while
the take-off scheduling is typically formulated separately to maximize aircraft throughput,
instead of time-based measures. We are able to formulate and solve the integrated problem
with one consistent time-based performance measure. Space and time separations required
between two consecutive departing aircraft hinge upon the weight-class of the two aircraft,
due to wake vortex, and their departure fixes (i.e., the first control point of the flight plan),
due to proximity of air routes. We are able to sequence arrivals of departing aircraft at a
runway, for optimal utilization runway capacity, in an integrated fashion along with taxiway
scheduling.
Our numerical experience shows that the major control and optimization objectives can be
reached, in particular sequencing arrivals of departing aircraft at runways through pushback
and taxiing scheduling (to achieve integrated optimality for the combined problem of taxiing
and take-off scheduling), making departing aircraft fill up a small queue at the runway (to
avoid possible spoilage of runway capacity during busy hours and to anticipate inability of
human operators to follow the optimized control), holding departing aircraft at the gate (to
avoid tarmac congestion), ensuring smooth travel on the tarmac for all aircraft (to avoid
tarmac congestion and to avoid unnecessary fuel burn and emissions), taxiing all arriving
aircraft off away from the runway upon completion of landing (to avoid traffic backup onto
runways), minimizing of total time spent on the tarmac (to minimize total delay), and limiting
the wait at the gate for each departing aircraft (to ensure fairness to all aircraft). Due to the
nature of mixed-integer programming and, more importantly, the integrated nature of the
12
ISDSI 2009
formulation, the execution time and the memory requirement grow quickly as the problem
size, including the size of the demand and size of the network, increases.
Numerical performance depends on the problem size and the hardware. Although real-world
implementations will involve much more powerful hardware, we are studying ways to speed
up the execution. For example, the integer values of all the binary variables, i.e., all the
sysx ijuiju 'and' , of this formulation are uniquely determined by the real-valued times at
which aircraft reach the relevant nodes, i.e., all the stiu ' . In addition, heuristics are being
developed to search for suboptimal solutions with short execution times. Armed with the
formulation and computer program reported in this paper, the performance of the heuristics
can be gauged accurately. We are also extending this formulation to include more complex
airport features.
Acknowledgment
The authors acknowledge gratefully the financial support of National Aeronautics and Space
Administration (NASA) of the US Federal Government through Grant No. NNX07AU49A.
References
Anagnostakis, I., Clarke, J.-P., Bohme, D., Volckers, U. (2001). “Runway operations planning
and control, sequencing and scheduling,” In Proceedings of the 34th
Hawaii International
Conference on System Sciences, HICSS-34, Maui, Hawaii.
Capozzi, B.J., DiFelici, J., and Jakobovits, R., “Towards Automated Airport Surface Traffic
Control: Potential Benefits and Feasibility,” Paper 2004-5408, Proceedings of AIAA
Guidance, Navigation, and Control Conference, Providence, Rhode Island, USA, Aug. 2004.
Cheng, V. H. L. (2004), “Surface Operation Automation Research for Airport Tower and
Flight Deck Automation,” Proceedings of the 2004 IEEE Intelligent Transportation Systems
(2004 ITSC), Washington, DC, October 3–5, 2004, Paper TuC2.4.
Idris, H.R., and Hansman, R.J., Jr. (2000), Observation and Analysis of Departure Operations
at Boston Logan International Airport, Report No. ICAT-2000-7, MIT International Center
for Air Transportation, Massachusetts Institute of Technology, Nov. 2000.
Smeltink, J. W. , Soomer, M. J. , de Waal, P. R. , and van der Mei, R. D. (2004), “An
Optimization Model for Airport Taxi Scheduling,” in Proceedings of the INFORMS Annual
Meeting, Denver, Colo, USA, October 2004.
Tsao, H.-S.J. and Wei, W. (2008), “An Optimization Architecture For Airport Surface
Operations,” submitted for possible presentation at Transportation Research Board Annual
Meeting on January 11-15, 2009 and for possible publication in the Journal of Transportation
Research Board; accessed on Sept. 30, 2009 at http://www.engr.sjsu.edu/jtsao/papers/TRB-
2009-Airport-Operations-Optimization-Architecture-submitted-on-08-01-08.pdf .
Related Documents











