Research Article Initial Alignment Error On-Line Identification Based on Adaptive Particle Swarm Optimization Algorithm Weilin Guo , Yong Xian, Bing Li, and Leliang Ren Xi’an Research Institute of High Technology, Xi’an, Shaanxi 710025, China Correspondence should be addressed to Weilin Guo; [email protected] Received 23 August 2018; Accepted 13 December 2018; Published 31 December 2018 Academic Editor: Waldemar T. W´ ojcik Copyright © 2018 Weilin Guo et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. To solve the problem of high accuracy initial alignment of strap-down inertial navigation system (SINS) for ballistic missile, an on-line identification method of initial alignment error based on adaptive particle swarm optimization (PSO) is proposed. Firstly, a complete navigation model of SINS is established to provide the accurate model basis for subsequent numerical optimization calculation. en setting the initial alignment error as the optimization parameter and regarding the minimum deviation between SINS and GPS output as the objective function, the error parameter optimization model is designed. At the same time, the mutation idea of genetic algorithm (GA) is introduced into the PSO; thus the adaptive PSO is adopted to identify the initial alignment error on-line. e simulation results show that it is feasible to solve the initial alignment error identification problem of SINS by intelligent optimization algorithm. Compared with the standard PSO algorithm and the GA, the adaptive PSO algorithm has the fastest convergence speed and the highest convergence precision, and the initial pitch error and the initial yaw error precision are within 10 and the initial azimuth error precision is within 25 . e navigation accuracy of SINS is improved effectively. Finally, the feasibility of the adaptive PSO algorithm to identify the initial alignment error is further validated based on the test data. 1. Introduction Initial alignment for strap-down inertial navigation system (SINS) plays an important role in the navigation operation of the ballistic missile. e main purpose of initial alignment is to establish the initial attitude matrix, and the quality of initial alignment will affect the navigation accuracy of SINS directly [1] and thus affect the missile firing accuracy ultimately. erefore, improving the initial alignment accuracy of SINS is of great significance to improve the performance of ballistic missile weapon. e propagation process of the initial alignment error of SINS is a complex nonlinear problem. e previous solution is to linearize the nonlinear problem, and the filtering algo- rithms based on Kalman filter are widely adopted [2–6]. A fast SINS initial alignment scheme based on the disturbance observer and Kalman filter is proposed to estimate the misalignment angles in [4], and an adaptive extended Kalman filter algorithm combined with innovation-based adaptive estimation is proposed in [7], while these filtering algorithms oſten have some disadvantages, such as the difficulty of model establishing, poor observability of parameters, and long alignment time [8]. Consequently, this paper rejects the traditional research method based on analytic simplification, linearization and filtering, attempting to convert the initial alignment problem of SINS into parameter optimization identification problem. e complete nonlinear optimization model is established, and the intelligent optimization algo- rithm is used to realize the on-line identification of the initial alignment error of SINS. To solve the initial alignment problem of inertial system, the application of genetic algorithm (GA) in the initial alignment of SINS on the static base is studied based on the intelligent optimization algorithm [9, 10]. e precision of the initial alignment error is about 2 in [9], and the alignment accuracy needs to be improved. At the same time, the GA has the disadvantages of large computational capacity, low efficiency, and complicated coding, while the particle swarm optimization (PSO) is simple in structure, fast in convergence, and easy to implement and has the advantage of dealing with complex systems. e transfer alignment between the master inertial sensor and the slave inertial Hindawi Mathematical Problems in Engineering Volume 2018, Article ID 3486492, 10 pages https://doi.org/10.1155/2018/3486492

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
Research ArticleInitial Alignment Error On-Line Identification Based onAdaptive Particle Swarm Optimization Algorithm
Weilin Guo , Yong Xian, Bing Li, and Leliang Ren
Xi’an Research Institute of High Technology, Xi’an, Shaanxi 710025, China
Correspondence should be addressed to Weilin Guo; [email protected]
Received 23 August 2018; Accepted 13 December 2018; Published 31 December 2018
Academic Editor: Waldemar T. Wójcik
Copyright © 2018 Weilin Guo et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
To solve the problem of high accuracy initial alignment of strap-down inertial navigation system (SINS) for ballistic missile, anon-line identification method of initial alignment error based on adaptive particle swarm optimization (PSO) is proposed. Firstly,a complete navigation model of SINS is established to provide the accurate model basis for subsequent numerical optimizationcalculation.Then setting the initial alignment error as the optimization parameter and regarding the minimum deviation betweenSINS andGPS output as the objective function, the error parameter optimizationmodel is designed. At the same time, themutationidea of genetic algorithm (GA) is introduced into the PSO; thus the adaptive PSO is adopted to identify the initial alignmenterror on-line. The simulation results show that it is feasible to solve the initial alignment error identification problem of SINS byintelligent optimization algorithm. Compared with the standard PSO algorithm and the GA, the adaptive PSO algorithm has thefastest convergence speed and the highest convergence precision, and the initial pitch error and the initial yaw error precision arewithin 10 and the initial azimuth error precision is within 25. The navigation accuracy of SINS is improved effectively. Finally,the feasibility of the adaptive PSO algorithm to identify the initial alignment error is further validated based on the test data.
1. Introduction
Initial alignment for strap-down inertial navigation system(SINS) plays an important role in the navigation operation ofthe ballistic missile. The main purpose of initial alignment isto establish the initial attitudematrix, and the quality of initialalignment will affect the navigation accuracy of SINS directly[1] and thus affect the missile firing accuracy ultimately.Therefore, improving the initial alignment accuracy of SINSis of great significance to improve the performance of ballisticmissile weapon.
The propagation process of the initial alignment error ofSINS is a complex nonlinear problem. The previous solutionis to linearize the nonlinear problem, and the filtering algo-rithms based on Kalman filter are widely adopted [2–6]. Afast SINS initial alignment scheme based on the disturbanceobserver and Kalman filter is proposed to estimate themisalignment angles in [4], and an adaptive extendedKalmanfilter algorithm combined with innovation-based adaptiveestimation is proposed in [7], while these filtering algorithmsoften have some disadvantages, such as the difficulty of
model establishing, poor observability of parameters, andlong alignment time [8]. Consequently, this paper rejects thetraditional research method based on analytic simplification,linearization and filtering, attempting to convert the initialalignment problem of SINS into parameter optimizationidentification problem.The complete nonlinear optimizationmodel is established, and the intelligent optimization algo-rithm is used to realize the on-line identification of the initialalignment error of SINS.
To solve the initial alignment problem of inertial system,the application of genetic algorithm (GA) in the initialalignment of SINS on the static base is studied based onthe intelligent optimization algorithm [9, 10]. The precisionof the initial alignment error is about 2 in [9], and thealignment accuracy needs to be improved. At the same time,the GAhas the disadvantages of large computational capacity,low efficiency, and complicated coding, while the particleswarm optimization (PSO) is simple in structure, fast inconvergence, and easy to implement and has the advantageof dealing with complex systems. The transfer alignmentbetween the master inertial sensor and the slave inertial
HindawiMathematical Problems in EngineeringVolume 2018, Article ID 3486492, 10 pageshttps://doi.org/10.1155/2018/3486492
http://orcid.org/0000-0003-0405-2986https://creativecommons.org/licenses/by/4.0/https://doi.org/10.1155/2018/3486492
-
2 Mathematical Problems in Engineering
sensor is realized by PSO, and the influence of the maneuveron alignment accuracy is analyzed in [11]. The PSO is appliedinto the parameter optimization of compass alignment circuitin SINS, and the performance of strap-down gyrocompassinitial alignment is improved in [12]. In view of the aboveanalysis and research results, the PSO algorithm is consideredto solve the initial alignment problem of the ballistic missileSINS.
In this paper, a complete SINS navigation model isestablished, and then the error parameter optimizationmodelis constructed based on the minimum deviation betweenthe position parameters outputted by SINS and the positionparameters measured by GPS. The mutation idea of GA isintroduced into PSO, and the inertial weight and learningfactors are improved to obtain adaptive PSO. Finally, thestandard PSO, GA, and adaptive PSO are adopted to identifythe initial alignment error with the flight software of a certaintype of ballistic missile. At the same time, the test dataare used to inspect the identification effect of intelligentoptimization algorithm.
The rest of this paper is organized as follows. A nav-igation model of SINS, including initial alignment errormodel and error compensation model, is established in thesecond section. In the third section, an error parameteroptimization model is constructed and the adaptive PSOis designed for the ballistic missile SINS. In the fourthsection, the simulation for identification of initial alignmenterror is given to demonstrate the feasibility of the intelligentoptimization algorithm. Finally, we conclude in the fifthsection.
2. Establishment of SINS Navigation Model
Themain coordinate frames used in this paper different fromother references are defined as follows: the body coordinateof the ballistic missile is the orthogonal reference framealigned with the inertial measurement unit (IMU) axes, andthe origin locates the mass of the ballistic missile, the x-axis along the longitudinal direction forward, opposite thedirection of gravity, the y-axis is perpendicular to the lon-gitudinal direction upward, the z-axis along the transversaldirection right, completing a right-handed system. Launchinertial coordinate (inertial coordinate) is a coordinate whoseorigin is the launch point, the x-axis points to target in thelocal level of launch point, and the y–axis is perpendicularto the launch point’s local level (upward) and constitutesthe right-handed Cartesian coordinates with the axes ofx, z. The inertial coordinate is used as the navigationframe.
2.1. Initial Alignment Error Model. The initial alignmenterrors of SINS, including initial pitch angle error Δ𝜑0, initialyaw angle errorΔ𝜓0, and initial azimuth errorΔ𝛾0, are causedby vertical degree, installation error, and aiming error of theballistic missile. The initial attitude matrix 𝐴 between thebody coordinate and the inertial coordinate can be describedas follows by using the quaternion (𝑞0, 𝑞1, 𝑞2, 𝑞3):
𝐴
= [[[[𝑞21 + 𝑞20 − 𝑞22 − 𝑞23 2 (𝑞1𝑞2 − 𝑞0𝑞3) 2 (𝑞0𝑞2 + 𝑞1𝑞3)2 (𝑞1𝑞2 + 𝑞0𝑞3) 𝑞20 + 𝑞22 − 𝑞21 − 𝑞23 2 (𝑞2𝑞3 − 𝑞0𝑞1)2 (𝑞1𝑞3 − 𝑞0𝑞2) 2 (𝑞0𝑞1 + 𝑞2𝑞3) 𝑞20 + 𝑞23 − 𝑞21 − 𝑞22
]]]](1)
The initial values of the quaternion (𝑞0, 𝑞1, 𝑞2, 𝑞3) are𝑞0 = 𝑞00 − 𝛾02 𝑞20𝑞1 = 𝑞10 + 𝛾02 𝑞30𝑞2 = 𝑞20 + 𝛾02 𝑞00𝑞3 = 𝑞30 − 𝛾02 𝑞10
(2)
where
𝑞00 = √22 (1 − Δ𝜑02 )𝑞10 = −𝜓02 𝑞00𝑞20 = 𝜓02 𝑞30𝑞30 = √22 (1 + Δ𝜑02 )
(3)
From (2) and (3), we can see that the initial alignmenterror will affect the initial values of the quaternion and thusaffect the calculation precision of the initial attitude matrix𝐴.
2.2. Error Compensation Model of SINS. During the flightcourse of ballistic missile, the inertial measurement unit(IMU) of SINS, including gyroscope and accelerometer, canmeasure apparent acceleration and angular velocity in realtime and output the data in pulse form. The pulse outputsof the accelerometer and the gyroscope under a navigationcycle are (Δ𝑁𝑤𝑥1, Δ𝑁wy1, Δ𝑁𝑤𝑧1) and (Δ𝑁𝑏𝑥1, Δ𝑁𝑏𝑦1, Δ𝑁𝑏𝑧1),respectively, in which the pulse number remains the same asthe actual missile, and the outputs are integers.
After the IMU sends the pulse signals to the onboardcomputer, the error compensation calculation is completedby the onboard computer in real time. The equations ofthe error compensation calculation of the apparent velocityincrement and the angular increment under a navigationcycle in body coordinate are shown in (4) and (5), respectively[13]:
[[[Δ𝑊𝑥𝑏0Δ𝑊𝑦𝑏0Δ𝑊𝑧𝑏0
]]] =[[[[[[[[[
(Δ𝑁𝑤𝑥1 − 𝐾0𝑥)𝐾1𝑥(Δ𝑁𝑤𝑦1 − 𝐾0𝑦)𝐾1𝑦(Δ𝑁𝑤𝑧1 − 𝐾0𝑧)𝐾1𝑧
]]]]]]]]]
-
Mathematical Problems in Engineering 3
[[[Δ𝑊𝑥𝑏Δ𝑊𝑦𝑏Δ𝑊𝑧𝑏
]]] =[[[Δ𝑊𝑥𝑏0Δ𝑊𝑦𝑏0Δ𝑊𝑧𝑏0
]]] −[[[
0𝐸𝑥𝑦Δ𝑊𝑥10𝐸𝑥𝑧Δ𝑊𝑥10]]](4)
[[[Δ𝜃𝑥𝑏0Δ𝜃𝑦𝑏0Δ𝜃𝑧𝑏0
]]] =[[[[[[[[[[[
Δ𝑁𝑏𝑥1𝐾𝑥Δ𝑁𝑏𝑦1𝐾𝑦Δ𝑁𝑏𝑧1𝐾𝑧
]]]]]]]]]]]− [[[
𝐷0𝑥𝐷0𝑦𝐷0𝑧]]]
[[[Δ𝜃𝑥𝑏Δ𝜃𝑦𝑏Δ𝜃𝑧𝑏
]]] = [[[Δ𝜃𝑥𝑏0Δ𝜃𝑦𝑏0Δ𝜃𝑧𝑏0
]]] −[[[[
0 𝐸𝑦𝑥 𝐸𝑧𝑥𝐸𝑥𝑦 0 𝐸𝑧𝑦𝐸𝑥𝑧 𝐸𝑦𝑧 0]]]][[[Δ𝜃𝑥𝑏0Δ𝜃𝑦𝑏0Δ𝜃𝑧𝑏0]]]
− [[[𝐷1𝑥 𝐷2𝑥 𝐷3𝑥𝐷1𝑦 𝐷2𝑦 𝐷3𝑦𝐷1𝑧 𝐷2𝑧 𝐷3𝑧
]]][[[Δ𝑊𝑥1Δ𝑊𝑦1Δ𝑊𝑧1]]]
(5)
where𝐾𝑖, 𝐾0𝑖, 𝐾1𝑖, 𝐷0𝑖, 𝐷1𝑖, 𝐷2𝑖, 𝐷3𝑖, and 𝐸𝑖𝑗 are the tool errorcoefficient of IMU which are calibrated in the missile techni-cal site.Δ𝑊𝑖𝑏0 andΔ𝜃𝑖𝑏0 are the calculated intermediate valuesof the apparent velocity and angle increment, respectively.Δ𝑊𝑖𝑏 and Δ𝜃𝑖𝑏 are the apparent velocity and the angleincrement in body coordinate after the error compensation,respectively, where 𝑖, 𝑗 = 𝑥, 𝑦, 𝑧 represents the three direc-tions of the x, y, and z axes.
2.3. Calculation of Velocity and Position in Inertial Coordinate.According to the error compensation model of SINS, theapparent velocity increment in body coordinate can be cal-culated. The apparent velocity increment in body coordinateis converted to inertial coordinate, and it can be presented as
[[[Δ𝑊𝑥𝑎Δ𝑊𝑦𝑎Δ𝑊𝑧𝑎]]] = 𝐴[[[
Δ𝑊𝑥𝑏Δ𝑊𝑦𝑏Δ𝑊𝑧𝑏]]] (6)whereΔ𝑊𝑥𝑎,Δ𝑊𝑦𝑎, and Δ𝑊𝑧𝑎 are the projections of apparentvelocity increment in inertial coordinate and the matrix 𝐴is calculated by (1), where the calculation equation of thequaternion is as follows:
[[[[[𝑞0𝑞1𝑞2𝑞3]]]]]𝑗= [[[[[[
𝑞0 −𝑞1 −𝑞2 −𝑞3𝑞1 𝑞0 −𝑞3 𝑞2𝑞2 𝑞3 𝑞0 −𝑞1𝑞3 −𝑞2 𝑞1 𝑞0]]]]]]𝑗−1
[[[[[[[[[[
1 − 18Δ𝜃2𝑗(12 − 148Δ𝜃2𝑗)Δ𝜃𝑥𝑏(12 − 148Δ𝜃2𝑗)Δ𝜃𝑦𝑏(12 − 148Δ𝜃2𝑗)Δ𝜃𝑧𝑏
]]]]]]]]]]𝑗
(7)
where Δ𝜃𝑗 = √Δ𝜃2𝑥𝑏 + Δ𝜃2𝑦𝑏 + Δ𝜃2𝑧𝑏. According to (7), thequaternion is calculated by the recursion method whichbased on the value of the previous moment, recursion to getthe quaternion of the current moment.The initial value of thequaternion can be calculated by (2).
By integrating the apparent velocity increment in inertialcoordinate, the recursive value of the velocity and positionin inertial coordinate at any moment of the missile can beobtained, and the calculation equation is as follows:
[[[V𝑥𝑎V𝑦𝑎V𝑧𝑎
]]]𝑗 =[[[V𝑥𝑎V𝑦𝑎V𝑧𝑎
]]]𝑗−1 +[[[Δ𝑊𝑥𝑎Δ𝑊𝑦𝑎Δ𝑊𝑧𝑎
]]]𝑗 +[[[𝑔𝑥𝑎𝑔𝑦𝑎𝑔𝑧𝑎
]]]𝑗Δ𝑇2
+ [[[𝑔𝑥𝑎𝑔𝑦𝑎𝑔𝑧𝑎
]]]𝑗−1Δ𝑇2
(8)
[[[𝑥𝑎𝑦𝑎𝑧𝑎]]]𝑗 =
[[[𝑥𝑎𝑦𝑎𝑧𝑎]]]𝑗−1 +
[[[V𝑥𝑎V𝑦𝑎V𝑧𝑎
]]]𝑗−1 Δ𝑇+([[[
Δ𝑊𝑥𝑎Δ𝑊𝑦𝑎Δ𝑊𝑧𝑎]]]𝑗 +
[[[𝑔𝑥𝑎𝑔𝑦𝑎𝑔𝑧𝑎
]]]𝑗−1 Δ𝑇)Δ𝑇2
(9)
where V𝑥𝑎, V𝑦𝑎, V𝑧𝑎 are the projections of velocity in inertialcoordinate;𝑥𝑎, 𝑦𝑎, 𝑧𝑎 are the projections of position in inertialcoordinate; 𝑔𝑥𝑎, 𝑔𝑦𝑎, 𝑔𝑧𝑎 are the projections of gravity accel-eration in inertial coordinate, which can be computed bythe ellipsoid gravity acceleration model; Δ𝑇 is the navigationcycle.
3. Error Parameter Optimization Modeland Algorithm Design
3.1. Establishment of Error Parameter Optimization Model
3.1.1. Select the Optimization Variable. Set the initial align-ment error of SINS as the optimization parameter; that is,𝑋 = (𝑥1, 𝑥2, 𝑥3)T = (Δ𝜑0, 𝜓0, 𝛾0)T (10)3.1.2. Determine the Objective Function. Regard the mini-mum deviation between the position parameters outputtedby SINS and the position parameters measured by GPS as theobjective function, namely,
𝐽 (𝑋) = min𝑁𝑢𝑚∑𝑖=1
√𝛿𝑥 (𝑖)2 + 𝛿𝑦 (𝑖)2 + 𝛿𝑧 (𝑖)2𝛿𝑥 (𝑖) = 𝑥𝐼𝑁𝑆 (𝑖) − 𝑥𝐺𝑃𝑆 (𝑖)𝛿𝑦 (𝑖) = 𝑦𝐼𝑁𝑆 (𝑖) − 𝑦𝐺𝑃𝑆 (𝑖)𝛿𝑧 (𝑖) = 𝑧𝐼𝑁𝑆 (𝑖) − 𝑧𝐺𝑃𝑆 (𝑖)
(11)
-
4 Mathematical Problems in Engineering
where𝑥𝐼𝑁𝑆(𝑖),𝑦𝐼𝑁𝑆(𝑖), and 𝑧𝐼𝑁𝑆(𝑖) are the position parametersoutputted by SINS at the navigation cycle 𝑖, which can becalculated by (9); 𝑥𝐺𝑃𝑆(𝑖),𝑦𝐺𝑃𝑆(𝑖), and 𝑧𝐺𝑃𝑆(𝑖) are the positionparameters measured by GPS at the navigation cycle i; 𝛿𝑥(𝑖),𝛿𝑦(𝑖), and 𝛿𝑧(𝑖) are the position deviations. 𝑁𝑢𝑚 is thenumber of navigation cycle used to optimize alignment, and𝑁𝑢𝑚 ⋅ Δ𝑇 ≤ 𝑇𝑠, 𝑇𝑠 is the total simulation test time.3.2. Design of Adaptive Particle Swarm Optimization Algo-rithm. PSO is an intelligent optimization algorithm for find-ing optimal region of search spaces through the interactionof individuals in a swarm [14], and it has been widelyapplied in the fields of aeronautics and astronautics becauseof its advantages such as fast convergence, simple structure,and strong versatility [15–17]. However, the standard PSOalgorithm has the disadvantage of premature convergenceand low efficiency in optimization iteration. Consequently,the standard PSO is improved to the adaptive PSO, and theimproved strategy is as follows:(1) The mutation idea is introduced into PSO algorithmbased on GA algorithm. Mutation operation is an importantmeans to increase population diversity in GA algorithm,which can expand search space and avoid falling into localoptimization. Therefore, the mutation idea is introducedinto PSO algorithm, and through the mutation operation ofparticles, the population can jump out of the current localoptimal position in foraging process and search for a largerspace range. Thus, the global search ability is enhanced toovercome the shortcoming of premature convergence of PSO.(2) The learning factors and inertia weight of PSOare designed as dynamic adjustment form to improve theconvergence speed and overcome the disadvantage of lowefficiency of PSO in the late optimization. By dynamicallyadjusting the values of the learning factors and inertia weightof PSO algorithm, it is ensured that PSO has strong globalsearch ability at the initial stage of optimization and a fastsearch speed at the later stage of optimization.
The basic optimization flow of initial alignment errorparameter by adaptive PSO is shown in Figure 1, and thespecific steps for optimization calculations are as follows.
Step 1 (initialize the population). Set particle population size𝑁, maximum iterations 𝑀, maximum position 𝑥max, andminimum position 𝑥min = −𝑥max. The initial position andthe initial velocity of the particles are randomly generated,and each particles fitness value of initialization population iscalculated to determine the individual best and the global bestof the particles.
Step 2 (update particle swarm velocity and position). Theequation for calculating the velocity and position of particlesis as follows:
V𝑖𝑗 (𝑘 + 1) = 𝑤 (𝑘) V𝑖𝑗 (𝑘) + 𝑟1𝑐1 (𝑘) (𝑃𝑖𝑗 (𝑘) − 𝑥𝑖𝑗 (𝑘))+ 𝑟2𝑐2 (𝑘) (𝑃𝑔𝑗 (𝑘) − 𝑥𝑖𝑗 (𝑘))𝑥𝑖𝑗 (𝑘 + 1) = 𝑥𝑖𝑗 (𝑘) + V𝑖𝑗 (𝑘 + 1)(12)
where 𝑥𝑖𝑗(𝑘) and V𝑖𝑗(𝑘) (𝑗 = 1, 2, 3) are the position andvelocity of the jth dimension of particle i at iteration k; 𝑤(𝑘)is the inertia weight; 𝑟1 and 𝑟2 are the random numbersdistributed in the range [0, 1]; 𝑐1(𝑘) and 𝑐2(𝑘) are the learningfactors;𝑃𝑖𝑗(𝑘) and𝑃𝑔𝑗(𝑘) are the individual best and the globalbest at iteration k, respectively.
In order to enhance the global exploration ability in theearly stage of optimization and improve the convergencespeed at the later stage of optimization, the inertia weight isdesigned to be the dynamic adjustment mode. The inertialweight has a large value at the beginning, and the weightdecreases with the increase of the number of iterations.Consequently, the inertia weight 𝑤(𝑘) can be designed as
𝑤 (𝑘) = 𝑤max − ( 𝑘𝑀)2 (𝑤max − 𝑤min) (13)Learning factors 𝑐1(𝑘) and 𝑐2(𝑘) are the factors which
can control degree of self-learning and group learning ofparticles, respectively. The particle swarm needs a largeself-learning ability to enhance the global search effect inthe early stage of optimization, and it needs a large grouplearning ability to speed up the convergence speed in the lateoptimization. Therefore, with the increase of the number ofiterations, learning factors 𝑐1(𝑘) continues to decrease andlearning factors 𝑐2(𝑘) increases gradually and the learningfactors can be described as
𝑐1 (𝑘) = 𝑐1max − ( 𝑘𝑀)2 (𝑐1max − 𝑐1min)𝑐2 (𝑘) = 𝑐2min + ( 𝑘𝑀)2 (𝑐2max − 𝑐2min)
(14)
Step 3. Calculate fitness value of population, and updateindividual best and global best. According to (11), the fitnessvalue 𝑓(𝑥𝑖(𝑘 + 1)) of particles is calculated at iteration 𝑘 + 1and compared with the previous fitness value 𝑓(𝑃𝑖(𝑘)) ofindividual best. If 𝑓(𝑥𝑖(𝑘 + 1)) < 𝑓(𝑃𝑖(𝑘)), the individualbest is updated, namely, 𝑃𝑖(𝑘 + 1) = 𝑥𝑖(𝑘 + 1). Similarly,comparing the fitness value of the individual best𝑓(𝑃𝑖(𝑘 + 1))at iteration 𝑘 + 1 with the previous fitness value of the globalbest 𝑓(𝑃𝑔(𝑘)), if 𝑓(𝑃𝑖(𝑘 + 1)) < 𝑓(𝑃𝑔(𝑘)), the global best ofparticles is updated, namely, 𝑃𝑔(𝑘 + 1) = 𝑃𝑖(𝑘 + 1).Step 4. Mutation operation and update the individual bestand the global best again.
(A) Select Mutation Particles. The fitness values of particleswarm at iteration 𝑘+1were sorted by descending order, andthe numbers𝑁𝑚 of particles arranged in front and with largefitness value were selected as the mutation objects.
(B) Mutation Operation. First, generate the random number𝑟, and then compare the sizes of the random number 𝑟 and𝑟𝑚, where 𝑟𝑚 is the mutation probability of particle. If thegenerated random number 𝑟 is less than 𝑟𝑚, the mutationoperation is performed as follows:𝑥𝑖𝑗 (𝑘) = (2𝑟 − 1) (𝑥max (𝑗) − 𝑥min (𝑗)) (15)
-
Mathematical Problems in Engineering 5
Initialize population
Update inertia weight and learning factors
Calculate the fitness of particle swarm
Update individual best value and global best value
Update particle position and velocity
Output optimal solution
End
no
yes
Mutation operation
Reach maximum iterations or meet precision requirements
Start
no
yes
The generated random
Select mutation particles and generate the random number r
Update individual best value and global best value
number r is less than
Figure 1: Calculation flow chart of adaptive PSO.
where 𝑟 is the random number distributed in the range [0, 1]and 𝜆 is the mutation coefficient. Otherwise, go to Step 5 forthe next calculation.
(C) Update Particle’s Best. For the new particles generatedby mutation, update the individual best and the global bestagain.
Step 5 (end condition). If reaching maximum iterations,namely, 𝑘 > 𝑀, or the search results satisfy the accuracyrequirement, the calculation is stopped and the optimalparameter of initial alignment error is output. Otherwise,return Step 2 for the next generation calculation.
4. Simulation Experiment and Result Analysis
The simulation study is presented to confirm the feasibility ofinitial alignment error on-line identification based on adap-tive PSO in this section. Firstly, the simulation conditionsare set up, then the simulation experiment and results areanalyzed. At last, the test data is introduced.
4.1. SimulationCondition Settings. Thesimulation conditionsof the initial alignment error optimization model for SINS areset as follows:(1) Setting initial pitch angle error is 90, initial yaw angleerror is -90 and initial azimuth error is -150 .The navigationcycleΔ𝑇 is 0.1 s, the number of navigation cycles𝑁𝑢𝑚 is 500,and the total simulation test time 𝑇𝑠 is 50 s.(2) Tool error of SINS.The constant and random drifts ofgyro are chosen as 0.02∘/h and 0.01∘/h/Hz, respectively. Theconstant and random drifts of accelerators are chosen as 100ug and 50 ug/Hz, respectively.(3)GPS navigation error. The position error is 5.0 m, andthe velocity error is 0.1 m/s.(4) Simulation conditions of PSO algorithm. The maxi-mum iterations 𝑀 is 100, the population size 𝑁 is 40, andthe maximum position 𝑥max = (300 300 500). The inertiaweights 𝑤max and 𝑤min are 0.8 and 0.4, respectively. Thelearning factors 𝑐1max and 𝑐2max are all 3.0, and the learningfactors 𝑐1min and 𝑐2min are all 0.5. The mutation numbers ofparticles 𝑁𝑚 are 10, the mutation probability 𝑟𝑚 is 0.2, andthe mutation coefficient 𝜆 is 0.5.
-
6 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 100Evolution time
GA optimizationStandard PSOAdaptive PSO
70
75
80
85
90
95
100
105
Initi
al p
itch
angl
e err
or()
Figure 2: Convergence process of initial pitch angle error.
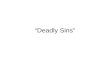
4.2. Simulation Results and Analyses. Based on the aboveerror parameter optimization model and taking the flightsoftware of a certain ballistic missile as the simulationexperiment environment, the standard PSO algorithm, theGA, and the adaptive PSO algorithm are adopted to optimizethe initial alignment error parameter of SINS, and theconvergence process of the initial pitch angle error, the initialyaw angle error, and the initial azimuth angle error are shownin Figures 2–4, and the fitness convergence diagrams of thethree algorithms are shown in Figure 5. The optimizationresults of initial alignment error are shown in Table 1. Itshows the accuracy and convergence speed of three differentalgorithms.
It is shown from Table 1 that the GA, the standard PSO,and the adaptive PSO can be used to optimize the initialalignment error parameter; the maximum residual error ofthe initial alignment error of three algorithms is not morethan 30, the optimization calculation time is less than 4.0s, and the convergence speed is fast. It shows that it is feasibleand effective in identifying the initial alignment error of SINSby using intelligent optimization algorithm.
From Figures 2–5, we can see that the adaptive PSO has afastest convergence speed than the GA and the standard PSO.It is shown fromTable 1 that the residual errors of initial pitchangle and the initial yaw angle calculated by the adaptive PSOare less than 10, and the residual error of the initial azimuthis less than 25, which shows that the adaptive PSO canimprove the convergence accuracy of the initial alignmenterror.
The initial alignment error parameter calculated by theadaptive PSO is compensated, and then the navigationparameters of the SINS are recalculated. The deviationbetween the navigation parameters obtained by error com-pensation and the actual navigation parameters of the missileis called the optimization residual. By simulation, the SINSposition error, GPS position error and optimization residual
of position are shown in Figure 6, and the SINS velocity error,GPS velocity error, and optimization residual of velocity areshown in Figure 7. The root mean square (RMS) statisticresults of navigation parameter error are listed in Table 2.
From Figures 6 and 7, we can find out that the optimiza-tion residuals of position and velocity are not only far lessthan SINS, but also significantly less than GPS navigationsystem. It is shown from Table 2 that the RMS position errorsof SINS are within 10 m, and the RMS velocity errors of SINSare within 1 m/s while the RMS position errors are less than1 m, and the RMS velocity errors are less than 0.1 m/s, afterthe initial alignment error is identified and compensated bythe adaptive PSO algorithm. Obviously, compared with SINS,the RMS errors of the navigation parameters compensated bythe adaptive PSO are reduced by 10 times, and the navigationaccuracy is greatly improved. The simulation results indicatethat the adaptive PSO can effectively identify the initialalignment error and improve the navigation accuracy ofSINS.
4.3. Test Data Validation. In order to verify the effectivenessof adaptive PSO algorithm to identify initial alignment error,the data collected from the test are analyzed. Among them,the gyroscope constant drift and the accelerometer constantbias are about 0.01∘/h and 100𝜇g, respectively; SINS dataupdate frequency is 10.0HZ; GPS data update frequency is1.0Hz. The actual measured output values of SINS and GPSwere collected and recorded during the test. The deviationbetween the position and the speed of SINS andGPS output iscalled the position error and the velocity error of SINS, thenthe position error and the velocity error curve of SINS areshown in Figures 8 and 9, respectively.
Based on the above test data, the adaptive PSO algorithmis used to optimize the initial alignment error parameters,and the results of the optimization parameters are shown inTable 3.
-
Mathematical Problems in Engineering 7
−200
−180
−160
−140
−120
−100
−80
−60
−40
−20
10 20 30 40 50 60 70 80 90 100Evolution time
GA optimization Standard PSOAdaptive PSO
Initi
al y
aw an
gle e
rror
()
Figure 3: Convergence process of initial yaw angle error.
−500
−400
−300
−200
−100
0
100
200
300
10 20 30 40 50 60 70 80 90 100Evolution time
GA optimizationStandard PSOAdaptive PSO
Initi
al az
imut
h an
gle e
rror
()
Figure 4: Convergence process of initial azimuth angle error.
Table 1: Optimization results of initial alignment error.
Optimization algorithm Parameter Initial alignment error Calculation time/(s)Δ𝜑0/() Δ𝜓0/() Δ𝛾0/()GA optimization Optimization value 92.42 -108.67 -122.62 3.85
Residual error 2.42 -18.67 27.38
Standard PSO Optimization value 91.03 -102.35 -124.53 3.46Residual error 1.03 -12.35 25.47
Adaptive PSO Optimization value 90.51 -99.29 -127.56 3.48Residual error 0.51 -9.29 22.44
-
8 Mathematical Problems in Engineering
Table 2: RMS statistical results of navigation parameter errors.
Error type Navigation parameter Pure SINS error Compensation error
Position error (m)𝑥𝑎 6.9748 0.1730𝑦𝑎 2.4885 0.3683𝑧𝑎 10.7109 0.0960
Velocity error (m/s)V𝑎𝑥 0.3748 0.0147V𝑎𝑦 0.1790 0.0306V𝑎𝑧 0.6336 0.0044
GA optimization Standard PSOAdaptive PSO
60
70
80
90
100
110
120
130
Fitn
ess v
alue
10 20 30 40 50 60 70 80 90 1000Evolution time
Figure 5: Fitness convergence diagram.
Table 3: Results of optimization parameters.
Optimizationparameter
Lowerbound
Upperbound
OptimizationvalueΔ𝜑0/() -90.00 90.00 90.00Δ𝜓0/() -90.00 90.00 73.46Δ𝛾0/() -180.00 180.00 -104.04
Table 4: RMS statistical results of errors.
Error type NavigationparameterInitialerror
Optimizationerror
Position error(m)
𝑥𝑎 6.2535 5.4109𝑦𝑎 10.3145 8.2356𝑧𝑎 8.6935 7.5713Velocity error(m/s)
V𝑎𝑥 0.4784 0.2770V𝑎𝑦 0.7956 0.6541V𝑎𝑧 0.2769 0.2540
The initial alignment error calculated by the adaptivePSO is compensated, and then the navigation parameters ofSINS are recalculated. After calculation and compensation,the position and velocity error curves are shown in Figures10 and 11 respectively, and the error RMS statistic results areshown in Table 4.
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50Time (s)
−10
0
10
20
30
Posit
ion
erro
r in
z axi
s (m
)
−5
0
5
10
Posit
ion
erro
r in
y ax
is (m
)
−20−15−10
−505
Posit
ion
erro
r in
x ax
is (m
)
SINS errorGPS erroroptimization residual
Figure 6: Position error simulation curve.
From Figures 10 and 11, we can see that the optimizationerrors of the position and velocity are less than the initialerrors of the position and velocity of the test data, afterthe initial alignment error is compensated. It is shown fromTable 4 that the RMS errors of the position and velocityof optimization calculation are less than the RMS errors ofthe test data. Therefore, it is proved that the adaptive PSOalgorithm is effective in identifying the initial alignment errorand can improve the navigation accuracy of missile flight.
5. Conclusion
The initial alignment error identification of ballistic missileSINS is studied in this paper. The real and complete naviga-tion model of SINS is established, which provides an accuratemodel basis for the initial alignment error identification. At
-
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40 45 50−0.8−0.6−0.4−0.2
00.2
Velo
city
erro
r in
x ax
is (m
/s)
SINS errorGPS erroroptimization residual
0 5 10 15 20 25 30 35 40 45 50
5 10 15 20 25 30 35 40 45 500Time (s)
−0.20.10.40.7
11.3
Velo
city
erro
r in
z axi
s (m
/s)
−0.10
0.10.20.30.40.5
Velo
city
erro
r in
y ax
is (m
/s)
Figure 7: Velocity error simulation curve.
0 10 20 30 40 50 60−20−10
010
Δxa
(m)
0 10 20 30 40 50 600
102030
Δya
(m)
0 10 20 30 40 50 60−40−20
020
t (s)
Δza
(m)
Figure 8: Position error curve of SINS.
the same time, the error parameter optimization model isdesigned, and the initial alignment error is identified on-line by the intelligent optimization algorithm. What is more,the inertia weight and learning factors of PSO are designedas dynamic adjustment form to improve search speed andsearch accuracy, and the mutation operation of the GA is
0 10 20 30 40 50 60
0 10 20 30 40 50 60−1
012
Δvy
a (m
/s)
0 10 20 30 40 50 60−1−0.5
00.5
t (s)
Δvz
a (m
/s)
−1−0.5
00.5
Δvx
a (m
/s)
Figure 9: Velocity error curve of SINS.
0 10 20 30 40 50 60−20
0
20
Δxa
(m)
0 10 20 30 40 50 600
10
20
30
Δya
(m)
−50
0
50
0 10 20 30 40 50 60t (s)
Δza
(m)
initial erroroptimization error
initial erroroptimization error
initial erroroptimization error
Figure 10: Position optimization error curve.
introduced into the PSO algorithm to jump out local optimalvalue and enhance global convergence ability.
The simulation results show that the intelligent optimiza-tion algorithm is efficient to solve the problem of initialalignment error identification. Of course, the results showthat the adaptive PSO algorithm has fastest search efficiencyand highest convergence accuracy than the standard PSOalgorithm and the GA, and the residuals of the initial pitchangle and the initial yaw angle are less than 10, and theresidual of the initial azimuth is less than 25. Finally, thevalidity of the adaptive PSO algorithm to identify the initialalignment error is validated based on the test data. Therefore,
-
10 Mathematical Problems in Engineering
0 10 20 30 40 50 60−1
−0.5
0
0.5Δ
vxa (
m/s
)
0 10 20 30 40 50 60−1
0
1
2
Δvy
a (m
/s)
−1
−0.5
0
0.5
0 10 20 30 40 50 60t (s)
Δvz
a (m
/s)
initial erroroptimization error
initial erroroptimization error
initial erroroptimization error
Figure 11: Velocity optimization error curve.
the content of this paper has a certain reference value for theimprovement of the initial alignment accuracy of the ballisticmissile SINS.
Data Availability
The test data used to support the findings of this study havenot been made available because the data are currently underembargo, and requests for data will be considered by thecorresponding author at the right time.
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper.
Acknowledgments
This work was supported in part by the National NaturalScience Foundation of China (no. 61374054).
References
[1] L. Chang, J. Li, and K. Li, “Optimization-based alignment forstrapdown inertial navigation system: Comparison and exten-sion,” IEEE Transactions on Aerospace and Electronic Systems,vol. 52, no. 4, pp. 1697–1713, 2016.
[2] H. Li, Q. Pan, X. Wang, X. Jiang, and L. Deng, “Kalman filterdesign for initial precision alignment of a strapdown inertialnavigation system on a rocking base,”The Journal of Navigation,vol. 68, no. 1, pp. 184–195, 2015.
[3] Xiyuan Chen, Chong Shen, and Yuefang Zhao, “Study onGPS/INS system using novel filtering methods for vessel atti-tude determination,” Mathematical Problems in Engineering,vol. 2013, Article ID 678943, 8 pages, 2013.
[4] T. Du, L. Guo, and J. Yang, “A fast initial alignment for SINSbased on disturbance observer and Kalman filter,” Transactionsof the Institute of Measurement& Control, vol. 38, no. 10, pp. 1–9,2016.
[5] G. G. Rigatos, “Nonlinear kalman filters and particle filters forintegrated navigation of unmanned aerial vehicles,” Roboticsand Autonomous Systems, vol. 60, no. 7, pp. 978–995, 2012.
[6] Xixiang Liu, Xiaosu Xu, Yiting Liu, and Lihui Wang, “AMethod for SINS Alignment with Large Initial MisalignmentAngles Based on Kalman Filter with Parameters Resetting,”Mathematical Problems in Engineering, vol. 2014, Article ID346291, 10 pages, 2014.
[7] F. Jiancheng and Y. Sheng, “Study on innovation adaptive EKFfor in-flight alignment of airborne POS,” IEEE Transactions onInstrumentation andMeasurement, vol. 60, no. 4, pp. 1378–1388,2011.
[8] Q.-E. He, Z.-Y. Gao, and Q.-P. Wu, “Initial alignment based onuncompensated bias filter for inertial navigation systems underdynamic conditions,” Zhongguo Guanxing Jishu Xuebao/Journalof Chinese Inertial Technology, vol. 23, no. 2, pp. 184–188, 2015.
[9] E.-S. Xia and Y.-D. Wang, “Study of direct alignment algorithmand genetic algorithm application to SINS initial alignment,”Yuhang Xuebao/Journal of Astronautics, vol. 27, no. 5, pp. 1091–1095, 2006.
[10] H.-Q. Gu, Y.-X. Yuan, and B. Li, “Application of geneticalgorithm in initial alignment of strapdown inertial guidancesystem,” Binggong Xuebao/Acta Armamentarii, vol. 28, no. 6, pp.677–681, 2007.
[11] J. H. Xia, Y. Y. Qin, and J. C. Jia, “Application of particleswarm optimization algorithm in transfer alignment,” Zhong-guo Guanxing Jishu Xuebao/Journal of Chinese Inertial Technol-ogy, vol. 17, no. 5, pp. 513–516, 2009.
[12] B. Zhu, J.-N. Xu, H.-Y. He, and S.-L. Guo, “Initial align-ment method of strapdown gyrocompass based on particleswarm optimization algorithm,” Zhongguo Guanxing Jishu Xue-bao/Journal of Chinese Inertial Technology, vol. 25, no. 1, pp. 47–51+108, 2017.
[13] Y. Xian, B. J. Li, G. Lei, andX. L. Zheng,BallisticMissile PrecisionAnalysis Method, National University of Defense TechnologyPress, Changsha, China, 2012.
[14] M. Pontani, P. Ghosh, and B. A. Conway, “Particle swarmoptimization of multiple-burn rendezvous trajectories,” Journalof Guidance, Control, andDynamics, vol. 35, no. 4, pp. 1192–1207,2012.
[15] H. B. Duan, Y. X. Yu, and Z. Y. Zhao, “Parameters identificationof UCAV flight control system based on predator-prey particleswarm optimization,” Science China Information Sciences, vol.56, no. 1, pp. 1–12, 2013.
[16] M. Pontani and B. A. Conway, “Optimal finite-thrust ren-dezvous trajectories found via particle swarm algorithm,” Jour-nal of Spacecraft and Rockets, vol. 50, no. 6, pp. 1222–1234, 2013.
[17] M.-P. Ran and Q. Wang, “Spacecraft rendezvous trajectoryoptimization method based on EPSO,” Yuhang Xuebao/Journalof Astronautics, vol. 34, no. 9, pp. 1195–1201, 2013.
-
Hindawiwww.hindawi.com Volume 2018
MathematicsJournal of
Hindawiwww.hindawi.com Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwww.hindawi.com Volume 2018
Probability and StatisticsHindawiwww.hindawi.com Volume 2018
Journal of
Hindawiwww.hindawi.com Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwww.hindawi.com Volume 2018
OptimizationJournal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Engineering Mathematics
International Journal of
Hindawiwww.hindawi.com Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwww.hindawi.com Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwww.hindawi.com Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwww.hindawi.com Volume 2018
Hindawi Publishing Corporation http://www.hindawi.com Volume 2013Hindawiwww.hindawi.com
The Scientific World Journal
Volume 2018
Hindawiwww.hindawi.com Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com
Di�erential EquationsInternational Journal of
Volume 2018
Hindawiwww.hindawi.com Volume 2018
Decision SciencesAdvances in
Hindawiwww.hindawi.com Volume 2018
AnalysisInternational Journal of
Hindawiwww.hindawi.com Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwww.hindawi.com
https://www.hindawi.com/journals/jmath/https://www.hindawi.com/journals/mpe/https://www.hindawi.com/journals/jam/https://www.hindawi.com/journals/jps/https://www.hindawi.com/journals/amp/https://www.hindawi.com/journals/jca/https://www.hindawi.com/journals/jopti/https://www.hindawi.com/journals/ijem/https://www.hindawi.com/journals/aor/https://www.hindawi.com/journals/jfs/https://www.hindawi.com/journals/aaa/https://www.hindawi.com/journals/ijmms/https://www.hindawi.com/journals/tswj/https://www.hindawi.com/journals/ana/https://www.hindawi.com/journals/ddns/https://www.hindawi.com/journals/ijde/https://www.hindawi.com/journals/ads/https://www.hindawi.com/journals/ijanal/https://www.hindawi.com/journals/ijsa/https://www.hindawi.com/https://www.hindawi.com/
Related Documents