Escuela Politecnica Nacional Taller de Control de procesos industriales Integrantes: Marco Gordon Andres Vega Angel Cedeño Para la planta Diseñar: 1) Controlador P que cumpla que si el setpoint es 2) Controlador P que cumpla que si el setpoint es 3) Controlador P que cumpla que || si el setpoint es 4) Controlador P que cumpla que || si el setpoint es 5) Controlador P_D que cumpla que si el setpoint es y que no oscile 6) Controlador P_D que cumpla que si el setpoint es y que no oscile 7) Controlador P_D que cumpla que || si el setpoint es y que no oscile 8) Controlador P_D que cumpla que || si el setpoint es y que no oscile 9) Controlador PI_D si el setpoint es que no oscile 10) Controlador PI_D si el setpoint es que no oscile 11) Controlador PI_D que || si el setpoint es 12) Controlador PI_D que || si el setpoint es Analisis de la planta en lazo abierto: Funcion de transferencia: ()

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Escuela Politecnica Nacional
Taller de Control de procesos industriales
Integrantes: Marco Gordon
Andres Vega
Angel Cedeño
Para la planta Diseñar:
1) Controlador P que cumpla que si el setpoint es
2) Controlador P que cumpla que si el setpoint es
3) Controlador P que cumpla que | | si el setpoint es
4) Controlador P que cumpla que | | si el setpoint es
5) Controlador P_D que cumpla que si el setpoint es y que
no oscile
6) Controlador P_D que cumpla que si el setpoint es y
que no oscile
7) Controlador P_D que cumpla que | | si el setpoint es y
que no oscile
8) Controlador P_D que cumpla que | | si el setpoint es
y que no oscile
9) Controlador PI_D si el setpoint es que no oscile
10) Controlador PI_D si el setpoint es que no oscile
11) Controlador PI_D que | | si el setpoint es
12) Controlador PI_D que | | si el setpoint es
Analisis de la planta en lazo abierto:
Funcion de transferencia:
( )

Respuesta de la planta en lazo abierto a Xsp=10
Como se puede apreciar la en la respuesta al escalon, la planta en lazo
abierto tiene un sobre pico de al menos un 25% y un error bastante alto
de aproximadamente el 90%.
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10
Análisis Temporal del Sistema en lazo abierto
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)

Respuesta de la planta en lazo abierto a Xsp=t-2
0 1 2 3 4 5 6 7 8 9 10-2
-1
0
1
2
3
4
5
6
7
8
Análisis Temporal del Sistema en lazo abierto
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)

P

Controlador P que cumpla que si el setpoint es
( ) ( )
( ( ))
( )
( )
( )
( )
( )
( )
( )
( )
( )
( ) ( ) ( )
( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( )
( ) ( ( ) ( ))
( ) ( ) ( ))
( )
( )

En este caso el valor kp es demasiado grande que aunque nos permite
tener un error muy pequeño nos vuelve oscilatoria la respuesta y
ademas genera un valor de señal de control muy alta.
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14
16
18
20
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)

Controlador P si el setpoint es
( )
( ) (
)
( )
( )
( )
( )
( )
( )
( )
( ) ( ) ( )
( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( )
( ) ( ( ) ( ))
0 1 2 3 4 5 6 7 8 9 10-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azu
l=u
(t)

( ) ( ) ( ))
( )
( )
0 1 2 3 4 5 6 7 8 9 10-4
-2
0
2
4
6
8
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)

En este caso para la entrada rampa tenemos igualmente una respuesta
oscilatoria aunque el error es estado estable es infinito.
Controlador P tal que | | si el setpoint es
( )
( )
( )
{ √
√ }
0 1 2 3 4 5 6 7 8 9 10-500
-400
-300
-200
-100
0
100
200
300
400
500
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azu
l=u
(t)

( ) ( √ √ )
( ) ( ) ( )
( ) ( √ √ )
( ) √
√ √
√
√ √
√ √
( ) ( √ √ √ )
( )
( ) ( √ √ √ )
( ) ( √ √ √ )
( )

Aquí se ha logrado obtener valores de la señal de control muy baja
pero a costa de tener un error en estado estable muy alto, de alrrededor
del 50%.
Controlador P tal que | | si el setpoint es
{ √
√ }
( ) ( √ √ )
( ) ( ) ( )
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
40
45
50
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)

( ) ( √ √ )
( ) √
√ √
√
√ √
√
√
( ) (
√
√ √ )
( )
( ) (
√
√ √ )
( ) (
√
√ √ )
( ) | |

En este caso se logra que la señal de control sea sea péqueña en un
inicio pero como la entrada es un rampa tenemos que este error crece
teoricamente hasta el infinito.
0 1 2 3 4 5 6 7 8 9 10-10
-5
0
5
10
15
20
25
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)

P_D

Controlador P_D tal que si y que no oscile
( )
( ) ( )
( )
( )
( ) ( )
( )( )
( ) ( ) ( )
( )
( )
( )
( )
( √ )( √ )
( √ )
( √ )
( √ )( √ )

√
( √ )
( √ )( √ )
√
( √ )
( √ )( √ )
( )
( )
( )
( )
( )
( ) ( )
( )
( )
( )
( )
( )
( )

En este caso se tiene que se han eliminado las oscilaciones añadiendo
un derivador y se cumple ademas que el error en estado estable es muy
pequeño, aunque el control llega a un valor muy alto
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
0 1 2 3 4 5 6 7 8 9 10-500
0
500
1000
1500
2000
2500
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azu
l=u
(t)

Controlador P_D si y que no oscile
( )
( ) ( )
( )
( )
( ) ( )
( )( )
( ) ( ) ( ) (
) ( )
( )
( )
( )
( √ )
( √ )
( )( ) ( √ ) ( √ )

{
( √ ) ( √ )
}
( )
( )
( )
( )
( )
( )
( ) ( )
( ) ( ) (
)
( ) )
( )
( )
( )

Igualmente se han eliminado las oscilaciones pero el error es infinito,
considerando ademas que el control tiene un valor muy grande cuando
t=0 y se incrementa a medida que t incrementa.
0 1 2 3 4 5 6 7 8 9 10-2
-1
0
1
2
3
4
5
6
7
8
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Ve
rde=
xsp
(t)
0 1 2 3 4 5 6 7 8 9 10-500
-400
-300
-200
-100
0
100
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azu
l=u
(t)

Controlador P_D tal que | | si y que no oscile
[ ( ) ]
( ) ( )
( )
( )
( )
{ √
√ }
( ) √ √
( ) ( ) ( )
( ) √ √
( ) ( √ ) √ ( √ ) √
( √ ) ( √ )
( ) √ √
( ) √ √
( ) √ √

( ) √ √
( )
En este caso se han eliminado las oscilaciones, se mantine una señal de
control muy baja pero aun el error en estado estable es muy grande.
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
40
45
50
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
A
zu
l=u
(t)

Controlador P_D tal que | | si y que no
oscile
[ ( ) ]
( ) ( )
( )
( )
( )
{ √
√ }
( ) √ √
( ) ( ) ( )
( ) √ √
( ) ( √ ) √ ( √ ) √
( √ ) ( √ )

( ) √ √
( ) √ √
( ) √ √
( ) √ √
( ) | |
0 1 2 3 4 5 6 7 8 9 10-10
-5
0
5
10
15
20
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)

PI_D

Controlador PI_D si el setpoint es , que no oscile
( ) ∫ ( )
( ) ( ) ∫ ( )
( ) ( )
( )( )
( ) ( ) ( ) ( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )( )( )
( )
( )( )( )
( )
( )( )( )
( )
( )
( )
( )
( )
( )
( )

( )
( )
( ) ( ) ∫ ( )
∫ ( )
∫
∫
∫
∫ ( )
( )
( ) ( )
( ) (
)
( )

En este controlador se han eliminado las oscilaciones, el error en estado
estable es cero, pero la señal de control aun sigue siendo muy alta.
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
0 1 2 3 4 5 6 7 8 9 10-500
0
500
1000
1500
2000
2500
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azu
l=u
(t)

Controlador PI_D si el setpoint es que no oscile
( ) ∫ ( )
( ) ( ) ∫ ( )
( ) ( )
( )( )
( ) ( ) ( ) ( ) (
) ( )
( )
( )
( )
( )
( )
( )
( ) ( ) ( )( )
( )( ) ( )( )
{
}
( )
( )
( )
( )
( )

( )
( )
( )
( )
∫ ( )
∫ ∫
∫
∫
∫ ( )
( )
( ) ( ) ∫ ( )
( ) ( )
( ) (
)
( )

Como es de esperarse la entrada rampa genera esta respuesta, el
control, la respuesta son infinitos en el infinito.
0 1 2 3 4 5 6 7 8 9 10-2
-1
0
1
2
3
4
5
6
7
8
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
0 1 2 3 4 5 6 7 8 9 10-500
-400
-300
-200
-100
0
100
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azu
l=u
(t)

Controlador PI_D que | | si el setpoint es
A mi criterio este seria el controlador mas optimo, ya que genera un
error en estado estable de cero, no tiene oscilaciones, y ademas la señal
de control es muy baja. Lo que habria que analizar si el transitorio es
adecuado según lo deseado.
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
40
45
50
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)

Controlador PI_D que | | si el setpoint es
En este caso la señal de control tiende al infinito y no hay oscilaciones
de la respuesta.
0 1 2 3 4 5 6 7 8 9 10-10
-5
0
5
10
15
20
25
30
35
40
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)

P SATURACION

Controlador P que cumpla que si el setpoint es En estado estable ( ) Usaremos como limites de la saturación 2*49=98
En la práctica, las señales de control tienen un límite finito lo que provoca un cambio en la respuesta, en este caso se ve cómo cambia xs(t) con saturación con respecto a x(t) sin saturación.
0 1 2 3 4 5 6 7 8 9 100
5
10
15
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)

La respuesta sin saturación tiene más oscilaciones y picos de mayor amplitud que la señal generada por la saturación de u(t)
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14
16
18
20
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
0 1 2 3 4 5 6 7 8 9 100
10
20
30
40
50
60
70
80
90
100
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azu
l=u
(t)

Controlador P si el setpoint es
En estado estable ( ) Usaremos como límites de la saturación 2*20=40 para poder ver los efectos de la saturación.
0 1 2 3 4 5 6 7 8 9 10-2
-1
0
1
2
3
4
5
6
7
8
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)

Controlador P tal que | | si el setpoint es En estado estable ( ) Usaremos como límites de la saturación 2*25=50
Para este control se han fijado los límites de la saturación a 50, que justo es el valor del máximo u(t) por lo tanto la saturación no tiene
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
40
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azul=
u(t
)

efectos este control, obteniéndose así los mismo resultados que sin saturación.
Controlador P tal que | | si el setpoint es
En estado estable ( ) Usaremos como límites de la saturación 2*20=40 para poder ver los efectos de la saturación.
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
40
45
50
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
A
zu
l=u
(t)

0 2 4 6 8 10 12 14 16 18 20-5
0
5
10
15
20
25
30
35
40
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
A
zu
l=u
(t)

P_D SATURACION

Controlador P_D tal que si y que no oscile
En estado estable ( ) Usaremos como límites de la saturación 2*49=98
Aquí vemos los efectos de la saturación, la respuesta con saturación
posee un sobre pico, lo que no sucede cuando no hay saturación.
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)

Controlador P_D si y que no oscile
En estado estable ( ) Usaremos como límites de la saturación 2*20=40
0 1 2 3 4 5 6 7 8 9 100
10
20
30
40
50
60
70
80
90
100
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azul=
u(t
)

Controlador P_D tal que | | si y que no oscile
En estado estable ( ) Usaremos como límites de la saturación 2*45=50
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35
40
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)
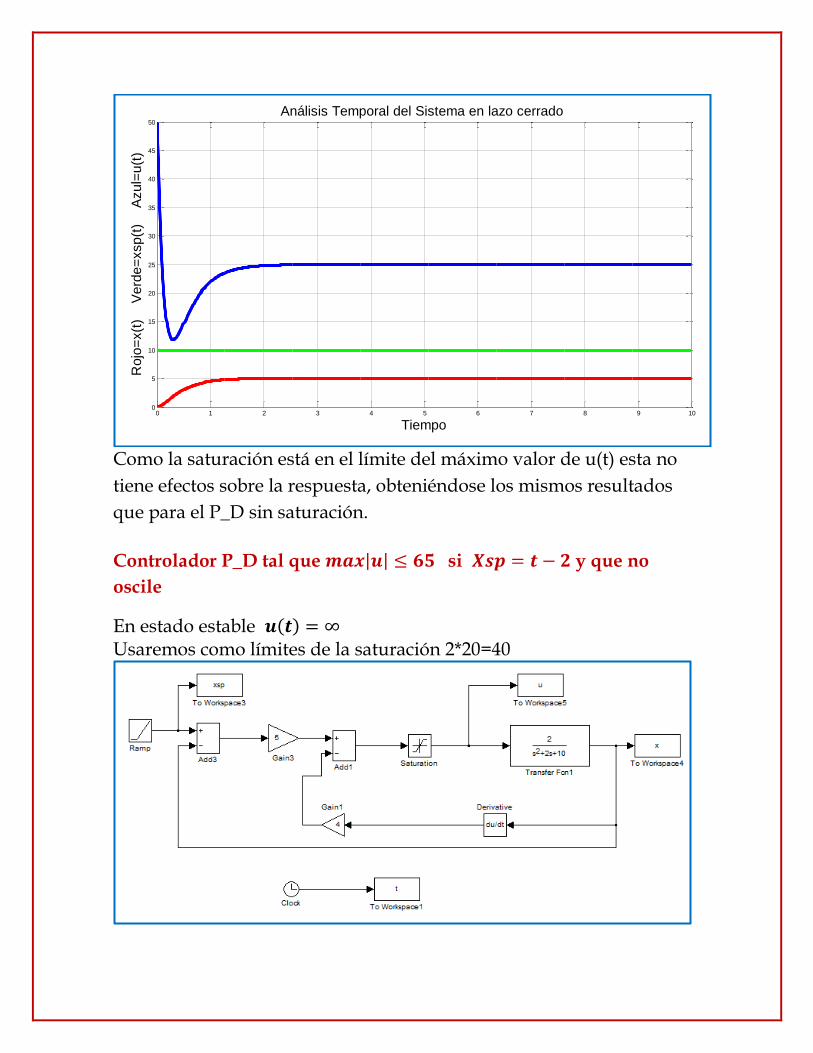
Como la saturación está en el límite del máximo valor de u(t) esta no
tiene efectos sobre la respuesta, obteniéndose los mismos resultados
que para el P_D sin saturación.
Controlador P_D tal que | | si y que no
oscile
En estado estable ( ) Usaremos como límites de la saturación 2*20=40
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
40
45
50
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
A
zu
l=u
(t)

0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)

PI_D SATURACION

Controlador PI_D si el setpoint es que no oscile
En estado estable ( ) Usaremos como límites de la saturación 2*50=100
Para es este controlador se tenía que la respuesta no era oscilatoria, ni presentaba picos de ningún tipo, pero ahora con la saturación ha aparecido un pico de aproximadamente el 22%
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)

Controlador PI_D si el setpoint es que no oscile
En estado estable ( ) Usaremos como límites de la saturación 2*20=40
0 1 2 3 4 5 6 7 8 9 100
10
20
30
40
50
60
70
80
90
100
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azul=
u(t
)

Controlador PI_D que | | si el setpoint es
En estado estable ( ) Usaremos como límites de la saturación 2*50=100
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35
40
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)

Por condición del problema la saturación aplicada no causa ningún
efecto en la respuesta.
Controlador PI_D que | | si el setpoint es
En estado estable ( ) Usaremos como límites de la saturación 2*20=40
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
40
45
50
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
A
zu
l=u
(t)

0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35
40
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
Azul=
u(t
)

PI_D SATURACION
Antiwinup

Controlador PI_D si el setpoint es que no oscile
De las prueba realizadas se llega a una conclusión para este caso en
particular, incluso integrando desde cero, el sobre pico no se elimina,
por lo que se puede justificar con las características de la planta.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
2
4
6
8
10
12
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)

Controlador PI_D si el setpoint es que no oscile
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
10
20
30
40
50
60
70
80
90
100
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azul=
u(t
)

Controlador PI_D que | | si el setpoint es
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35
40
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Ve
rde
=xsp(t
)
Azu
l=u(t
)

En este caso se observa cómo se manipuló la integración para lograr
que desde t=0 hasta t 1 no se integre el error y luego de ese tiempo se
empiece, dándonos como resultado lo mostrado en la gráfica para x(t)
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Rojo
=x(t
)
Verd
e=
xsp(t
)
0 1 2 3 4 5 6 7 8 9 1010
15
20
25
30
35
40
45
50
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Azul=
u(t
)

Controlador PI_D que | | si el setpoint es
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
30
35
40
Análisis Temporal del Sistema en lazo cerrado
Tiempo
Ro
jo=
x(t
)
Ve
rde
=xsp
(t)
A
zu
l=u
(t)

Related Documents











