UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL DEPARTAMENTO ACADÉMICO TOPOGRAFÍA Y VÍAS DE TRANSPORTE Clases mejoradas Curso: GEODESIA SATELITAL TV217G Docente: Jorge Mendoza Dueñas Jefe de Practicas: Ing. Davila Lavaud Juan Carlos Integrantes: PERCCA PAITAN,Erik Jhonatan HUAMANI BALBIN, Jesus MARTIN CRUZ, Junior Stalin CERQUIN AMARU, Alejandro Sección: G

INFORME
Dec 09, 2015
HJJKMLJIOBMGNJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJBYF7BRVTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTRDR4EED5EEDYCDRRCV
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
UNIVERSIDAD NACIONAL DE INGENIERÍAFACULTAD DE INGENIERÍA CIVIL
DEPARTAMENTO ACADÉMICO TOPOGRAFÍA Y VÍAS DE TRANSPORTE
Clases mejoradas
Curso: GEODESIA SATELITALTV217G
Docente: Jorge Mendoza Dueñas
Jefe de Practicas: Ing. Davila Lavaud Juan Carlos
Integrantes: PERCCA PAITAN,Erik Jhonatan HUAMANI BALBIN, Jesus MARTIN CRUZ, Junior Stalin CERQUIN AMARU, Alejandro
Sección: G
LIMA – PERÚ

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
1) CONCEPTOS FUNDAMENTALES
SUPERFICIE TOPOGRAFICA
Es el relieve terrestre, con sus montañas, valles y otras formas terrestres continentales y marítimos.
GEOIDE
Se define como la superficie equipotencial del campo gravitacional terrestre que coincide con las aguas del mar en su estado normal de equilibrio. Además, el geoide no es expresablemente matemáticamente por tener una forma irregular.
2 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
ELIPSOIDE DE REVOLUCION
Es el volumen geométrico que prob¿viene de una elipse que gira alrededor de su eje menor
El elipsoide, en la geodesia aparece debido a la necesidad de expresar matemáticamente la superficie de la tierra, pues ya sabemos que el geoide carece de dicha facultad; así pues el elipsoide es el cuerpo geométrico que se aproxima en mayor medida a la forma real de la TIERRA.
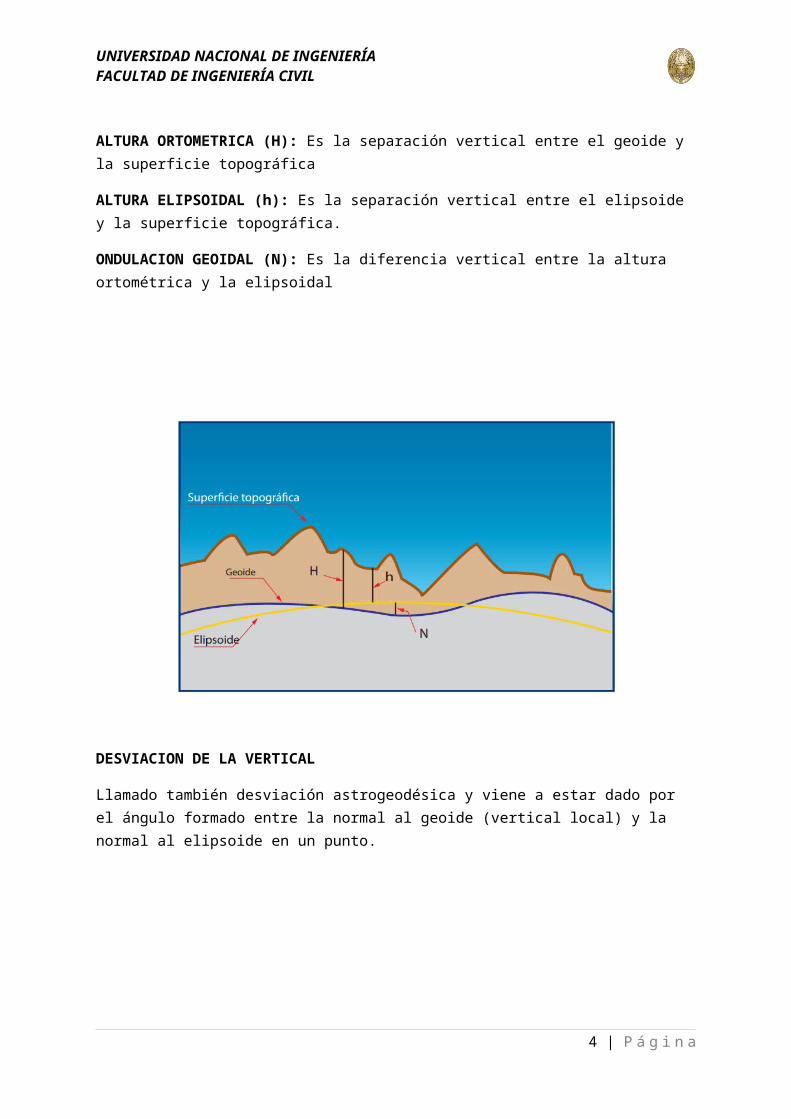
ALTURA ORTOMETRICA (H): Es la separación vertical entre el geoide y la superficie topográfica
ALTURA ELIPSOIDAL (h): Es la separación vertical entre el elipsoide y la superficie topográfica.
ONDULACION GEOIDAL (N): Es la diferencia vertical entre la altura ortométrica y la elipsoidal
3 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
DESVIACION DE LA VERTICAL
Llamado también desviación astrogeodésica y viene a estar dado por el ángulo formado entre la normal al geoide (vertical local) y la normal al elipsoide en un punto.
4 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
PUNTO DATUM
Llamado también punto fundamental o punto origen. Es aquel punto donde se hace coincidir la vertical al geoide con la normal al elipsoide (desviación de la vertical igual cero).
2) SISTEMA DE REFERENCIALa posición de un punto puede quedar definido dependiendo del tipo de sistema elegido, así como de los objetivos que se persigue, en tal sentido distinguiremos dos sistemas genéricos.
EL SISTEMA DE REFERENCIA TERRESTRE: El cual se considera fijo a la tierra y se utiliza para determinar las coordenadas de puntos sobre la superficie terrestre o sus proximidades, tal como los satélites artificiales que distan en promedio 20000 Km.
EL SISTEMA DE REFERENCIA ESPACIAL: Se encuentra fijo al espacio, lo cual lo convierte en un sistema inercial (libre de aceleración) donde los cálculos Newtonianos son totalmente permitidos, este sistema es el apropiado para analizar el movimiento de cuerpos externos a la tierra, tales como los planetas, estrellas, etc.
2.1) SISTEMA DE REFERENCIA TERRESTRE
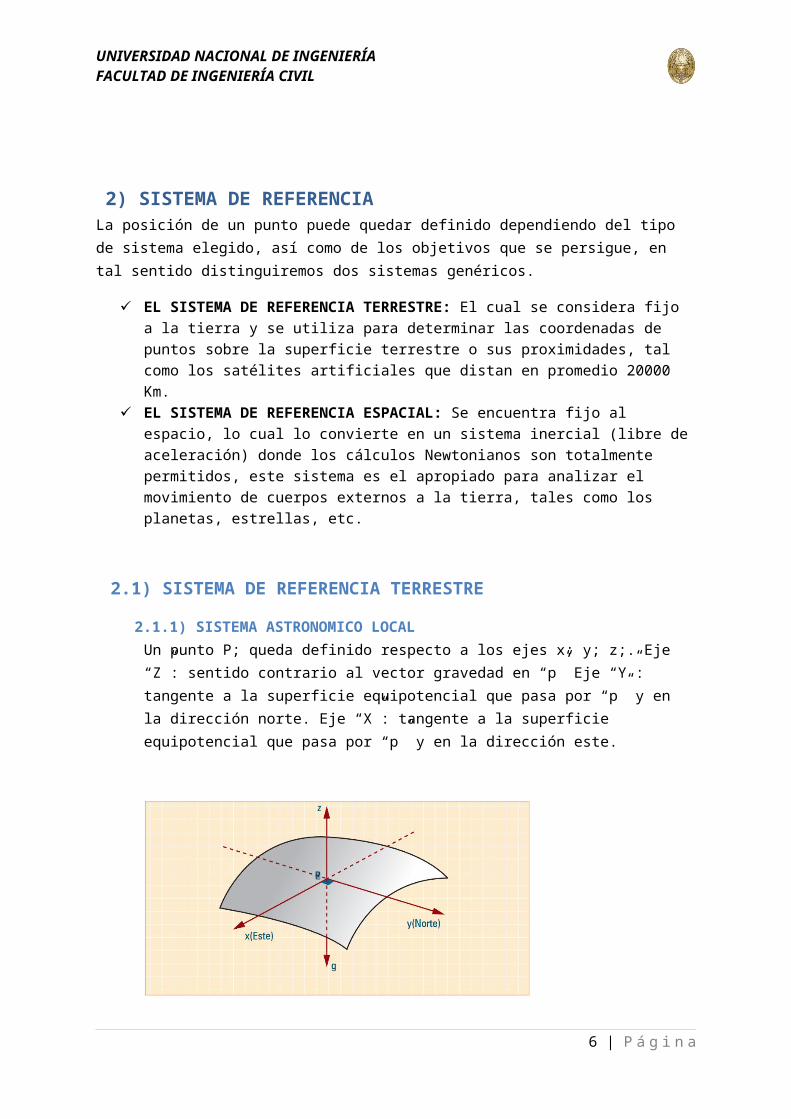
2.1.1) SISTEMA ASTRONOMICO LOCALUn punto P; queda definido respecto a los ejes x; y; z;. Eje “Z”: sentido contrario al vector gravedad en “p” Eje “Y”: tangente a la superficie equipotencial que pasa por “p” y en la
5 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
dirección norte. Eje “X”: tangente a la superficie equipotencial que pasa por “p” y en la dirección este.
2.1.2) SISTEMA GEODÉSICO LOCAL
El sistema geodésico local, está compuesto por: Un elipsoide de referencia. Un punto datum.
6 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
DESVENTAJAS DEL SISTEMA LOCAL
Este sistema es enteramente planimétrico, no es tridimensional; las cotas altimétricas se desarrollan a partir de otros caminos.
Las zonas limítrofes sufren confusiones en sus redes geodésicas, dado que comúnmente se presentan diferencias inaceptables.
Los elementos de los diversos datum no guardan relación.
Algunos sistemas locales de hoy:
Datum norteamericano: referido al elipsoide 1866 de Clarke, el origen es rancho inmóvil de Meades; el sistema incorpora Canadá, México, Estados Unidos de Norteamerica, asimismo contempla parte de América Central.
El Datum Europeo: referido al elipsoide Internacional (Hayford), el origen está situado en Potsdam – Alemania, este Datum se conoce con el nombre ED50 (Datum Europeo 1950); El origen actual está ubicado en Munich y se llama ED-70 (Datum Europeo 1979 ó Datum Munich).
El Datum Cabo: Referido al Elipsoide modificado en 1880 de Clarke y tiene su punto de origen en el FF-Elsfontein, cerca de Elizabeth Portuario. Este Datum fue basado en el trabajo de los astrónomos de H.: Sir Thomas Maclear (1833- 1870) y sir David Gill (1879 – 1907).
El Datum Geodetic Australiano 1984 (AGD84): Se basa en el elipsoide nacional australiano a = 6378 160.00 m y f = 1/298,25. El origen es la estación Geodetic de Ichnston.
7 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
El Datum Bogotá: Tiene su punto de partida en el observatorio astronómico de Botogá y está referido al elipsoide internacional (Hayford).
El Datum Campo Inchauspe: Tiene su origen en el punto astronómico Inchauspe, cerca de la ciudad de Pehuajó en la provincia de Buenos Aires, Argentina. El elipsoide asociado fue el internacional (Hayford).
El Datum Provisional Sudamericano 1956 (PSAD-56): Tiene su punto de partida en la Canoa –Venezuela con el elipsoide internacional (Hayford).
El Datum Sudamericano 1969 (SAD69): Tiene su origen en Chua – Brasil (Lat. 19° 45’, Long. 48° 06’) y está referido al elipsoide sudamericano 1969.
8 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
2.1.3) SISTEMA ASTRONOMICO GLOBAL
DEFINICIÓN DEL SISTEMA
Se utilizarán unos ejes de coordenadas fijos sobre la Tierra, es decir, que giren con ella, de manera que las coordenadas de un punto, en principio, serán siempre las mismas. Los convencionalismos que llevan el sistema de referencia a convencional son:
• Origen: Centro de masas terrestres o geocentro, incluyendo la atmósfera y los océanos.
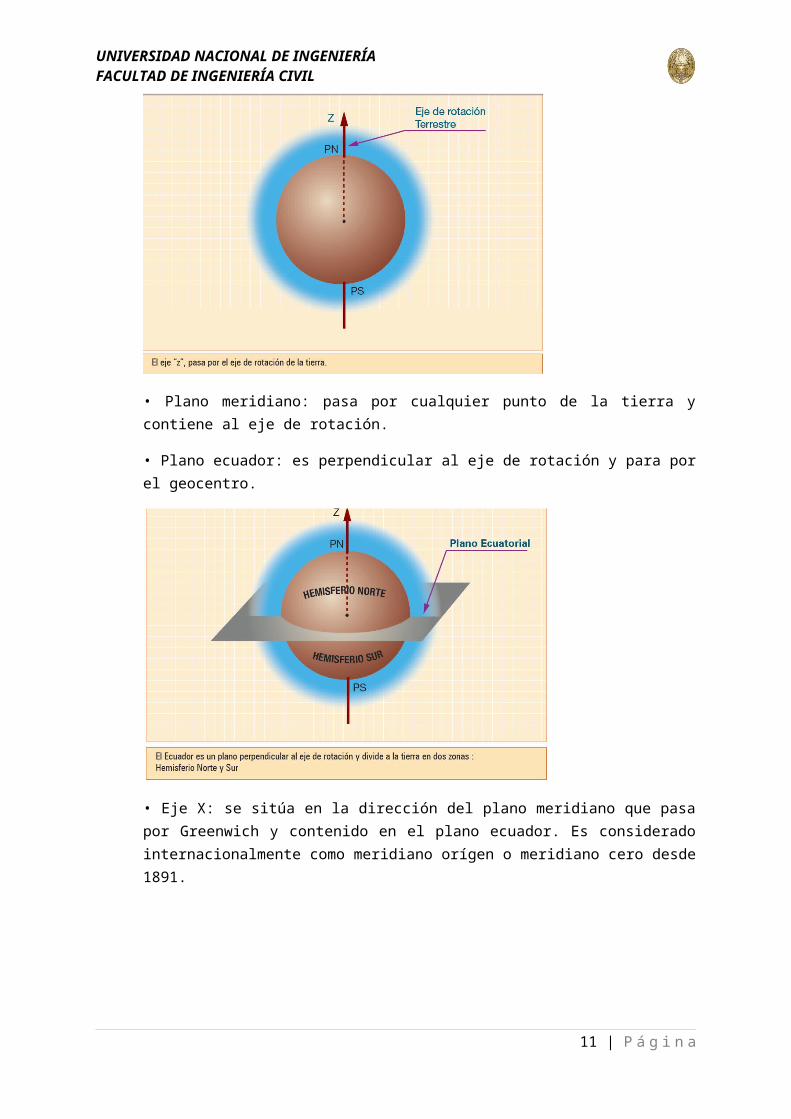
• Eje Z: coincide con el eje de rotación terrestre.
• Plano meridiano: pasa por cualquier punto de la tierra y contiene al eje de rotación.
• Plano ecuador: es perpendicular al eje de rotación y para por el geocentro.
9 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
• Eje X: se sitúa en la dirección del plano meridiano que pasa por Greenwich y contenido en el plano ecuador. Es considerado internacionalmente como meridiano orígen o meridiano cero desde 1891.
• Eje Y: contenido en el plano ecuador y perpendicular al eje X y su sentido será tal que los tres ejes formen una tripleta dextrógira.
10 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
SISTEMA ASTRONOMICO GLOBAL
El sistema astronómico global surge como respuesta a la necesidad de encontrar un sistema de referencia asociado al campo gravitatorio, cuyos ejes no experimenten ninguna rotación y sean independientes del punto en cuestión.
De esta forma, en el campo de gravedad terrestre se define, como sistema natural de coordenadas, el sistema astronómico global.
Es necesario definir en primer lugar el concepto de meridiano astronómico. Se entiende por meridiano astronómico de un punto el plano que conteniendo al vector gravedad en dicho punto es paralelo al eje de rotación.
Un punto cualquiera P viene definido en el sistema astronómico global por tres coordenadas
Latitud astronómica F. Ángulo, medido en el plano del meridiano astronómico, que forman la tangente a la dirección de la línea de la plomada en P y el plano del ecuador.
Longitud astronómica L. Ángulo, medido en el plano del ecuador, que forman el meridiano astronómico de Greenwich y el plano meridiano que contiene a P.
Potencial de gravedad W. La tercera coordenada es el potencial de gravedad en el punto P y lo sitúa dentro del sistema de superficies de nivel
11 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
Las coordenadas (F, L) se pueden determinar de forma absoluta mediante observaciones astronómicas2 . Estas coordenadas, definen además la dirección de la vertical astronómica ó física en el punto considerado. No es posible establecer una relación entre el sistema astronómico global y un sistema de coordenadas cartesianas geocéntricas asociado a él (eje Z coincidente con el eje de rotación terrestre) en ambos sentidos de forma directa. Es necesario un paso intermedio a través del potencial de gravedad. Es decir
Es decir, las coordenadas astronómicas son función de las primeras derivadas del potencial. Por ello, las líneas de los meridianos astronómicos ( L = constante) y de los paralelos astronómicos (F = constante) son líneas en el espacio con doble curvatura y no pueden ser contenidas en un plano. La tercera coordenada, el potencial gravitatorio W no puede determinarse de forma absoluta. Se determinan en su lugar, diferencias de potencial respecto a la superficie equipotencial de referencia, el geoide, mediante el empleo de nivelación y medidas de gravedad. Por ello, se suele emplear también la altitud ortométrica H(altitud medida sobre la linea de la vertical desde el punto hasta el Geoide), como tercera coordenada en el sistema astronómico global. Como ya se ha dicho, las coordenadas astronómicas pueden obtenerse de forma absoluta a partir de observaciones astronómicas. La precisión que se obtiene para las mismas es del orden métrico (0”,1-0”,2). Las observaciones más precisas en geodesia se obtienen de forma relativa. El problema radica en que dichas observaciones relativas están inevitablemente referidas al sistema astronómico local. Es decir, por un lado disponemos de observaciones de tipo absoluto en el sistema astronómico global y, por otro, observaciones relativas, de mayor precisión, en
12 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
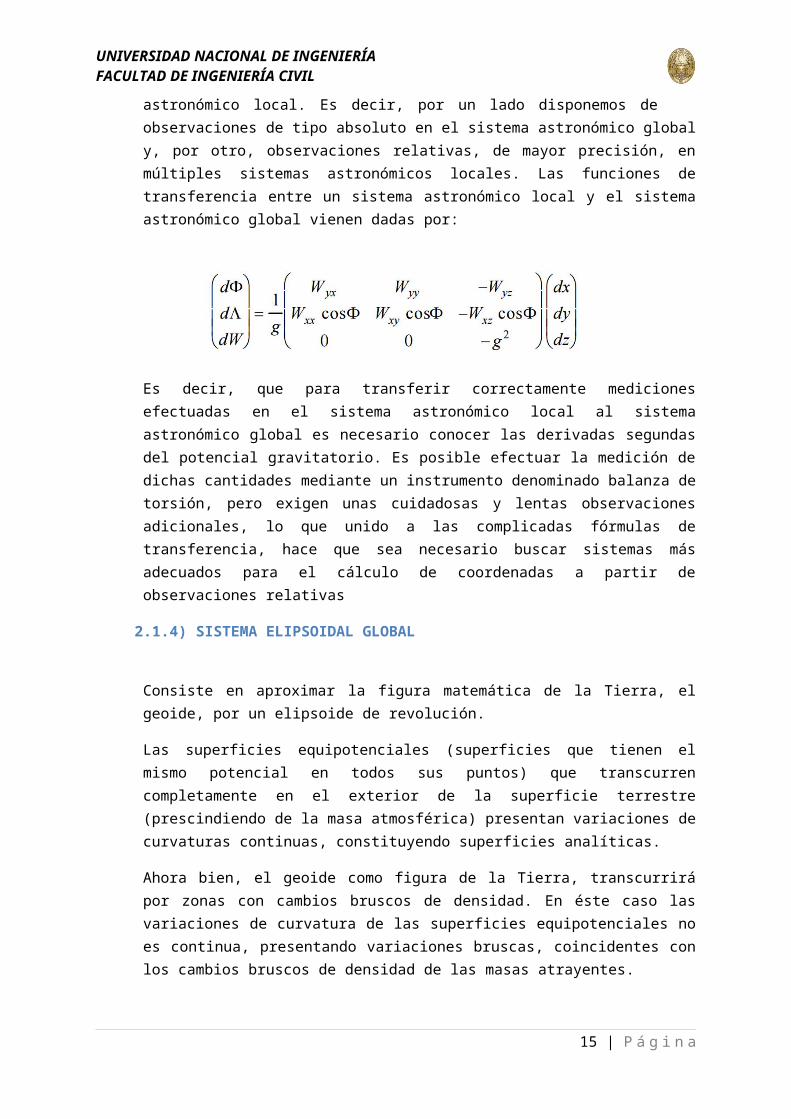
múltiples sistemas astronómicos locales. Las funciones de transferencia entre un sistema astronómico local y el sistema astronómico global vienen dadas por:
Es decir, que para transferir correctamente mediciones efectuadas en el sistema astronómico local al sistema astronómico global es necesario conocer las derivadas segundas del potencial gravitatorio. Es posible efectuar la medición de dichas cantidades mediante un instrumento denominado balanza de torsión, pero exigen unas cuidadosas y lentas observaciones adicionales, lo que unido a las complicadas fórmulas de transferencia, hace que sea necesario buscar sistemas más adecuados para el cálculo de coordenadas a partir de observaciones relativas
2.1.4) SISTEMA ELIPSOIDAL GLOBAL
Consiste en aproximar la figura matemática de la Tierra, el geoide, por un elipsoide de revolución.
Las superficies equipotenciales (superficies que tienen el mismo potencial en todos sus puntos) que transcurren completamente en el exterior de la superficie terrestre (prescindiendo de la masa atmosférica) presentan variaciones de curvaturas continuas, constituyendo superficies analíticas.
Ahora bien, el geoide como figura de la Tierra, transcurrirá por zonas con cambios bruscos de densidad. En éste caso las variaciones de curvatura de las superficies equipotenciales no es continua, presentando variaciones bruscas, coincidentes con los cambios bruscos de densidad de las masas atrayentes.
Aún así, el grado de aproximación con el geoide que puede obtenerse al adoptar un elipsoide de referencia es muy elevado, ya que las diferencias entre un elipsoide de referencia bien definido, con significado físico, y el geoide, no superan los 100 metros. Para ello se determinan su semieje mayor y su aplanamiento de forma que se cumpla, para el conjunto de puntos observados, que el sumatorio de los cuadrados de las ondulaciones del geoide sea mínimo
13 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
Una vez obtenidos los parámetros geométricos (a, f) es necesario asignarle una masa M y un velocidad de rotación w para dotar al elipsoide de significado físico Un punto P en este sistema queda definido por tres coordenadas:
Latitud geodésica (φ) es el ángulo, medido en el plano meridiano, que forman la normal al elipsoide an el punto P y el plano del ecuador. En el sistema elipsoidal el plano meridiano es el definido por la normal al elipsoide y el propio eje de rotación, ya que ambas rectas se cortan en el espacio, formando un plano.
Longitud geodésica (λ) es el ángulo, medido en el plano del ecuador, que forman el plano meridiano que contiene a P y el plano meridiano de Greenwich0.
Altitud elipsoidal (h) es la distancia entre el punto P, medida a lo largo de la normal al elipsoide que pasa por dicho punto, y el elipsoide. Este tipo de altitud no tiene ningún significado físico, solamente carácter geométrico.
La mayor ventaja que presenta este sistema es que la geometría de su superficie es perfectamente regular y conocida, facilitando así cualquier tipo de cálculo.
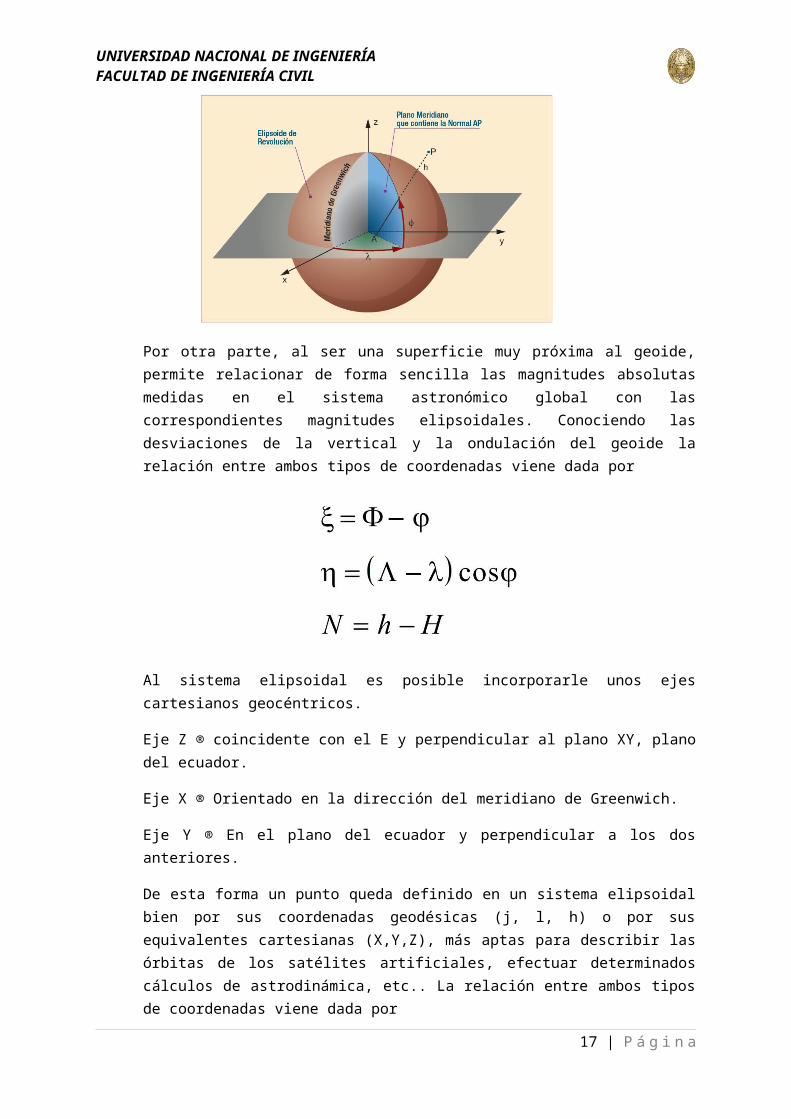
Por otra parte, al ser una superficie muy próxima al geoide, permite relacionar de forma sencilla las magnitudes absolutas medidas en el sistema astronómico global con las correspondientes magnitudes elipsoidales. Conociendo las desviaciones de la vertical y la ondulación del geoide la relación entre ambos tipos de coordenadas viene dada por
14 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
Al sistema elipsoidal es posible incorporarle unos ejes cartesianos geocéntricos.
Eje Z ® coincidente con el E y perpendicular al plano XY, plano del ecuador.
Eje X ® Orientado en la dirección del meridiano de Greenwich.
Eje Y ® En el plano del ecuador y perpendicular a los dos anteriores.
De esta forma un punto queda definido en un sistema elipsoidal bien por sus coordenadas geodésicas (j, l, h) o por sus equivalentes cartesianas (X,Y,Z), más aptas para describir las órbitas de los satélites artificiales, efectuar determinados cálculos de astrodinámica, etc.. La relación entre ambos tipos de coordenadas viene dada por
15 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
MOVIMIENTO DEL EJE DE ROTACION TERRESTRE
La dirección del eje de rotación terrestre, cambia con el tiempo respecto a la propia superficie terrestre.El polo describe a lo largo del tiempo una trayectoria libre que es una curva más o menos circular de radio 6 metros y período aproximado de 430 días, provocado por el carácter deformable de la tierra.Superpuesta a ésta trayectoria libre, se encuentra una serie de oscilaciones provocadas por la influencia gravitatoria del sol y la luna con una magnitud de 60 centímetros.
16 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre, dado que el sistema de referencia irá cambiando. Lo más indicado es tomar como eje z de referencia al origen o centro de los círculos de movimiento libre, quedando así determinado el eje de un modo convencional.
Si las coordenadas de los puntos se refieren al polo convencional, trendremos coordenadas absolutas, si se refieren al polo instantáneo, tendremos coordenadas instantáneas.
No hay teoría científica que pueda predecir el movimiento del polo, así que se monitorea contínuamente mediante observaciones. Esta materialización se realiza con observaciones astronómicas lo que da lugar al establecimiento detres polos diferentes.
Polo C.I.O. (Convencional International Origen). Definido como la posición media del polo entre 1900 y 1905
Polo B.I.H. (BUREAU International de L’Heure) creada en 1912; encargada del mantenimiento de la hora y dela posición del origen de longitudes (posición media del observatorio astronómico de Greenwich).
La determinación de la latitud de sus observatorios, generó el polo BIH que proporciona estimaciones más frecuentes (medias de 5 días) y precisiones de 1 metro en la determinación del movimiento del polo.
Polo I.P.M.S. (International Polar Motion Service). Generado a partir de determinaciones de latitud astronómica en 80 estaciones y con precisión de un metro en la determinación del movimiento del polo.
Polo I.E.R.S. (International Earth Rotation And Reference Systems Service).Creado en 1987, reemplazando a la BIH y a la IPMS para, entre otras cosas, monitorear el movimiento del polo, basándose en técnicas espaciales de forma continua
17 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
3) SISTEMA DE REFERENCIA GEODESICO GLOBAL WGS84
Los valores expuestos en el apartado 2.4.1 son los actuales, pero en su origen diferían con ellos, por lo que los parámetros diferían con los adoptados por la ITRF; en base a estos resultados la U.S. Defense Mapping Agency (DMA) decidió reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es más preciso), realizando esta alineación de forma periódica.
La primera versión actualizada y revisada del WGS84, válida desde el 2 de Enero de 1994, se llamó WGS84(G730), donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementó el sistema refinado.
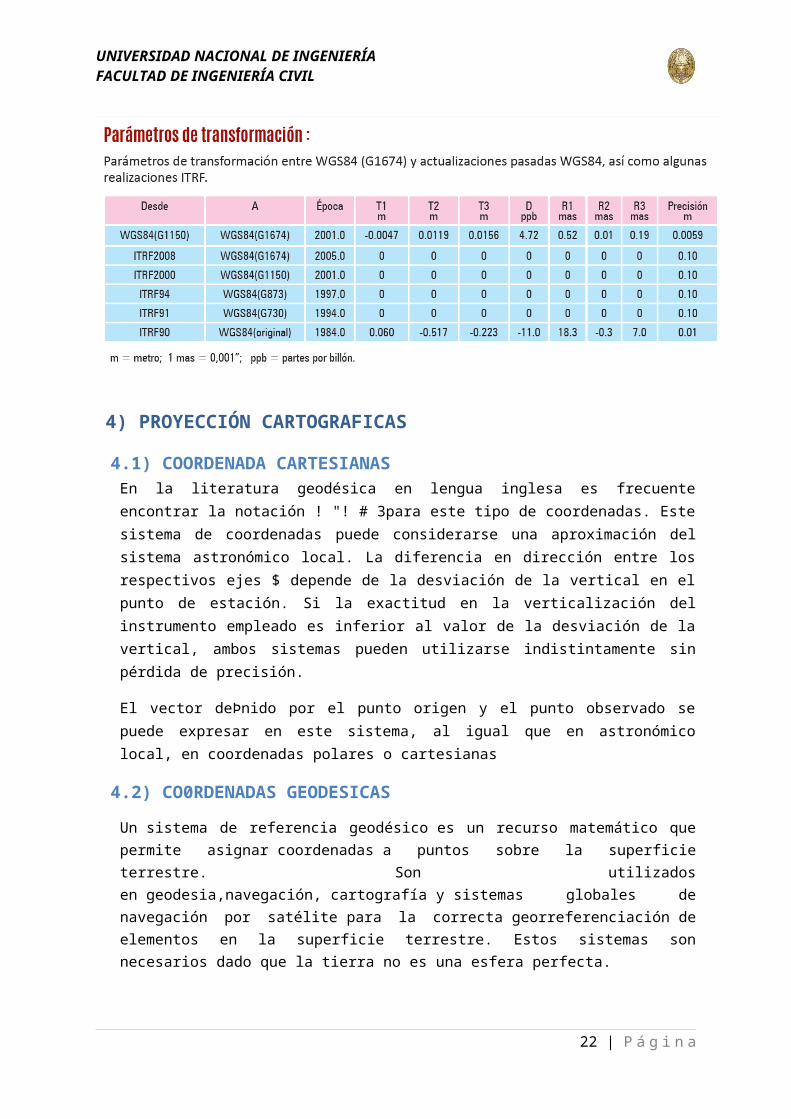
Parámetros de transformación entre los marcos ITRF2008 e ITRF2005, los parámetros de rotación y sus variaciones son cero. 20 En 1996, la U.S. National Imagery and Mapping Agency (NIMA), sucesora de la DMA, implementó una nueva versión refinada del marco que llamó WGS84(G873), válida desde el 29 de Septiembre de 1996. Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores.
Para su alineación con el marco ITRF94 se fijaron las coordenadas de 13 estaciones ITRF94 en el proceso de cálculo y ajuste de las coordenadas WGS84(G873), finalmente los marcos ITRF94, para la época 1997.0 y WGS84(G873) presentan diferencias menores a los 2 cm.
Los refinamientos anteriores afectan a la precisión de las coordenadas del marco, pero no cambian la definición original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM).
Actualmente existe un nuevo refinamiento, WGS84(G1150), ya que las estaciones de referencia han aumentado de 5 a 16: 10 de la fuerza aérea Norteamericana y 6 de la NIMA, figura 17; después de alinear esta actualización al marco ITRF2000, fijando para el cálculo de las coordenadas WGS84 49 estaciones ITRF, las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente idénticos.
WGS84, identifica cuatro parámetros :
Semieje mayor = a = 6,378,137.00 m
Aplanamiento = 1/f = 298.257223563
Constante de gravitación geocéntrica = GM = 3,986,004.418 x 108 m3/s2
Velocidad angular media de la tierra = ω = 7,292,115 x 10-11 rad/s
La orientación del eje Z, está definida por el Polo I.E.R.S. ; el eje x, por el meridiano origen definido por el I.E.R.S.
18 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
4) PROYECCIÓN CARTOGRAFICAS
4.1) COORDENADA CARTESIANASEn la literatura geodésica en lengua inglesa es frecuente encontrar la notación ! "! # 3para este tipo de coordenadas. Este sistema de coordenadas puede considerarse una aproximación del sistema astronómico local. La diferencia en dirección entre los respectivos ejes $ depende de la desviación de la vertical en el punto de estación. Si la exactitud en la verticalización del instrumento empleado es inferior al valor de la desviación de la vertical, ambos sistemas pueden utilizarse indistintamente sin pérdida de precisión.
El vector deÞnido por el punto origen y el punto observado se puede expresar en este sistema, al igual que en astronómico local, en coordenadas polares o cartesianas
19 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
4.2) CO0RDENADAS GEODESICAS
Un sistema de referencia geodésico es un recurso matemático que permite
asignar coordenadas a puntos sobre la superficie terrestre. Son utilizados
en geodesia,navegación, cartografía y sistemas globales de navegación por
satélite para la correcta georreferenciación de elementos en la superficie terrestre. Estos
sistemas son necesarios dado que la tierra no es una esfera perfecta.
Dentro de estos cabe distinguir los llamados sistemas locales, que utilizan para su
definición un elipsoide determinado y un punto datum, y los sistemas globales cuyos
parámetros están dados por una terna rectangular (X, Y, Z) cuyo origen se encuentra en
el geocentro terrestre. Para definir las coordenadas geodésicas (latitud, longitud y altura)
cuentan con un elipsoide de revolución asociado. En la realidad tanto el centro como
los ejes son inaccesibles en la práctica.
4.3) COORDENADAS UTM
El sistema de coordenadas universal transversal de Mercator (en inglés Universal
Transverse Mercator, UTM) es un sistema de coordenadas basado en la proyección
cartográfica transversa de Mercator, que se construye como la proyección de
Mercatornormal, pero en vez de hacerla tangente al Ecuador, se la hace tangente a
un meridiano.
A diferencia del sistema de coordenadas geográficas, expresadas en longitud y latitud,
las magnitudes en el sistema UTM se expresan en metros únicamente al nivel del mar,
que es la base de la proyección del elipsoide de referencia.
PROYECCIONES CARTOGRÁFICAS
Proyectar es la acción de lograr que un objeto sea visible sobre la figura de otro,
de impulsar una cosa hacia delante o de planificar. El resultado de estas
acciones recibe el nombre de proyección.
Es imposible llevar a cabo la proyección cartográfica sin evitar la presencia de
algunos tipos de distorsiones.
20 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
Sin embargo se han elaborado proyecciones que mantienen alguna propiedad
de la superficie elipsoidal “sin distorsión” a costa de distorsionar las otras
propiedades; ello obedece al objetivo que se persigue.
Este proceso conlleva distorsiones de la superficie original en 3-dimenciones, al
convertirse a una superficie plana de dos dimenciones.
Existen, por lo tanto, diferentes tipos de proyecciones de acuerdo al contexto. En
esta oportunidad, nos interesa recordar el significado de la proyección cónica,
que consiste en la dirección de la totalidad de las líneas proyectantes hacia el
mismo punto. Esto quiere decir que la totalidad de las líneas proyectadas
confluyen en un único espacio. La principal ventaja que ofrece la proyección
21 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
cónica como representación gráfica es que reproduce las imágenes de una
forma similar a lo percibido por el ojo.
Dentro de las proyecciones cónicas, nos encontramos con la proyección
cartográfica cónica. Este concepto refiere a proyectar los elementos que se
hallan en la esfera de la tierra sobre un cono tangente, usando de vértice el eje
que une a los dos polos.
La proyección cartográfica cilíndrica, por su parte, implica la proyección de la
esfera terrestre sobre un cilindro. Al igual que las demás proyecciones
cartográficas, ésta provoca ciertas distorsiones en la representación resultante.
La proyección cartográfica cenital o polar, en cambio, consiste en proyectar una
parte de la tierra sobre una superficie plana, tangente a la esfera. Esto hace que
se pueda obtener una imagen parecida a la que se percibiría
del planeta observando desde un determinado punto.
Existen también otras clases de proyecciones cartográficas. Lo que hay que
tener en cuenta es que una proyección cartográfica siempre es un esquema de
representación gráfico que vincula, de manera ordenada, los puntos de la esfera
terrestre con los puntos de un mapa (en el cual se refleja la imagen en cuestión).
Además de la clasificación de proyección cartográfica expuesta hasta el
momento, que parte del tipo de superficie sobre el cual se lleva a cabo (un cono,
un cilindro o un plano), también es posible analizar el modo en el que los puntos
se disponen en la imagen proyectada en relación con su ubicación original, lo
cual nos permite hablar de oblicua, secante o tangente. Por otro lado, si nos
enfocamos en las diferencias gráficas de los diferentes territorios, podemos
distinguir entre los siguientes tres tipos de proyección:
22 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
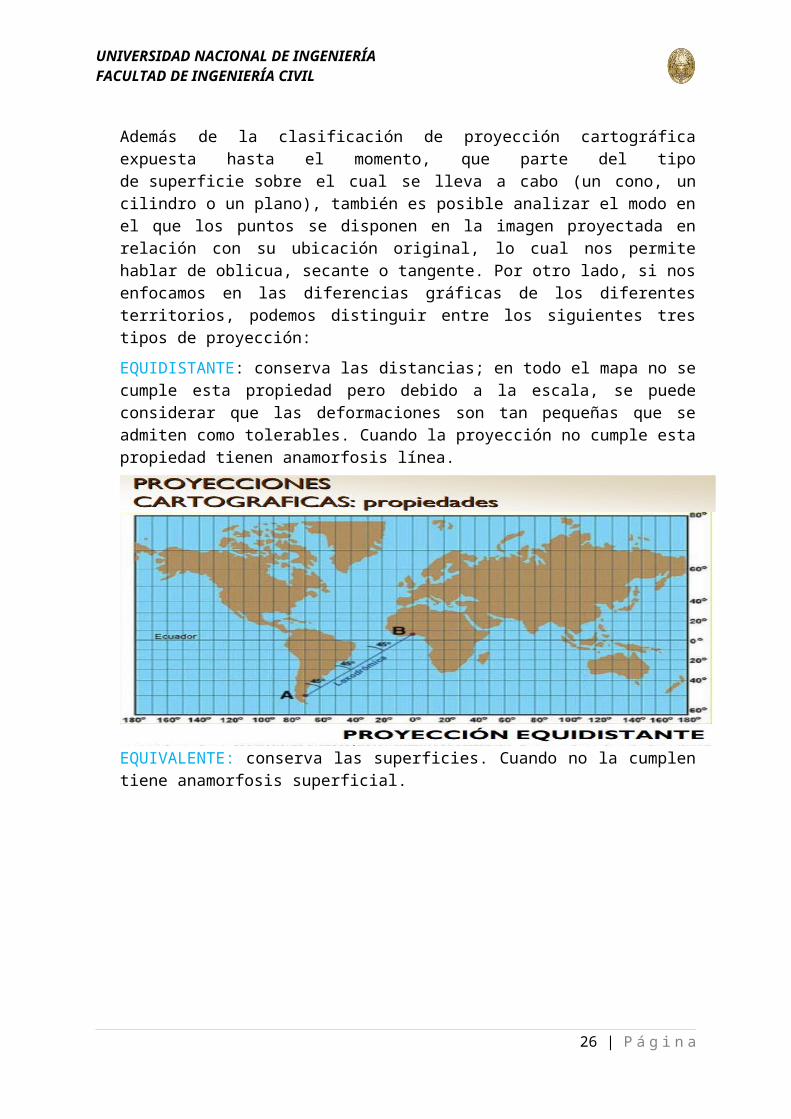
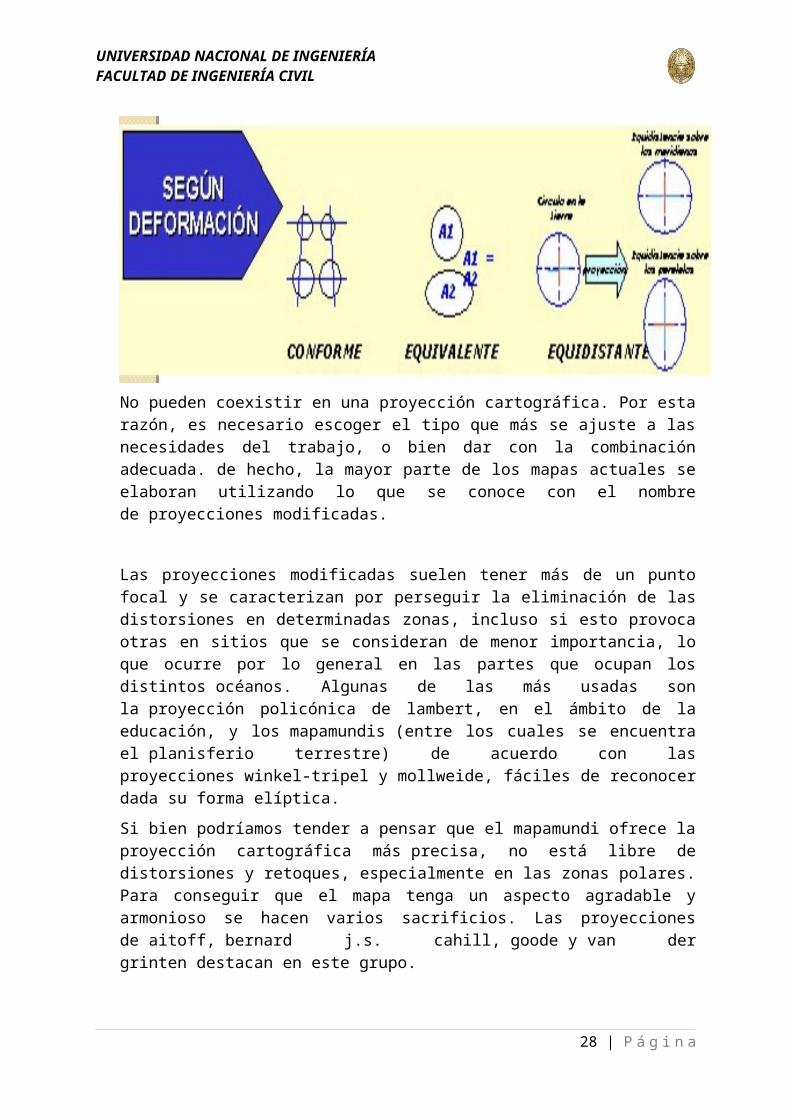
EQUIDISTANTE: conserva las distancias; en todo el mapa no se cumple esta
propiedad pero debido a la escala, se puede considerar que las deformaciones
son tan pequeñas que se admiten como tolerables. Cuando la proyección no
cumple esta propiedad tienen anamorfosis línea.
EQUIVALENTE: conserva las superficies. Cuando no la cumplen tiene
anamorfosis superficial.
CONFORME: conserva el ángulo entre dos puntos medios en la superficie de
referencia y en el mapa. Si no lo conserva se dice que la proyección tiene
anamorfosis angular.
23 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
AFILÁTICA: no conservan ninguna de las propiedades anteriores pero tienen
valores tolerables para determinar zonas.
No pueden coexistir en una proyección cartográfica. Por esta razón, es necesario
escoger el tipo que más se ajuste a las necesidades del trabajo, o bien dar con la
combinación adecuada. de hecho, la mayor parte de los mapas actuales se
elaboran utilizando lo que se conoce con el nombre de proyecciones
modificadas.
Las proyecciones modificadas suelen tener más de un punto focal y se
caracterizan por perseguir la eliminación de las distorsiones en determinadas
zonas, incluso si esto provoca otras en sitios que se consideran de menor
importancia, lo que ocurre por lo general en las partes que ocupan los
distintos océanos. Algunas de las más usadas son la proyección policónica de
lambert, en el ámbito de la educación, y los mapamundis (entre los cuales se
24 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
encuentra el planisferio terrestre) de acuerdo con las proyecciones winkel-
tripel y mollweide, fáciles de reconocer dada su forma elíptica.
Si bien podríamos tender a pensar que el mapamundi ofrece la proyección
cartográfica más precisa, no está libre de distorsiones y retoques, especialmente
en las zonas polares. Para conseguir que el mapa tenga un aspecto agradable y
armonioso se hacen varios sacrificios. Las proyecciones de aitoff, bernard j.s.
cahill, goode y van der grinten destacan en este grupo.
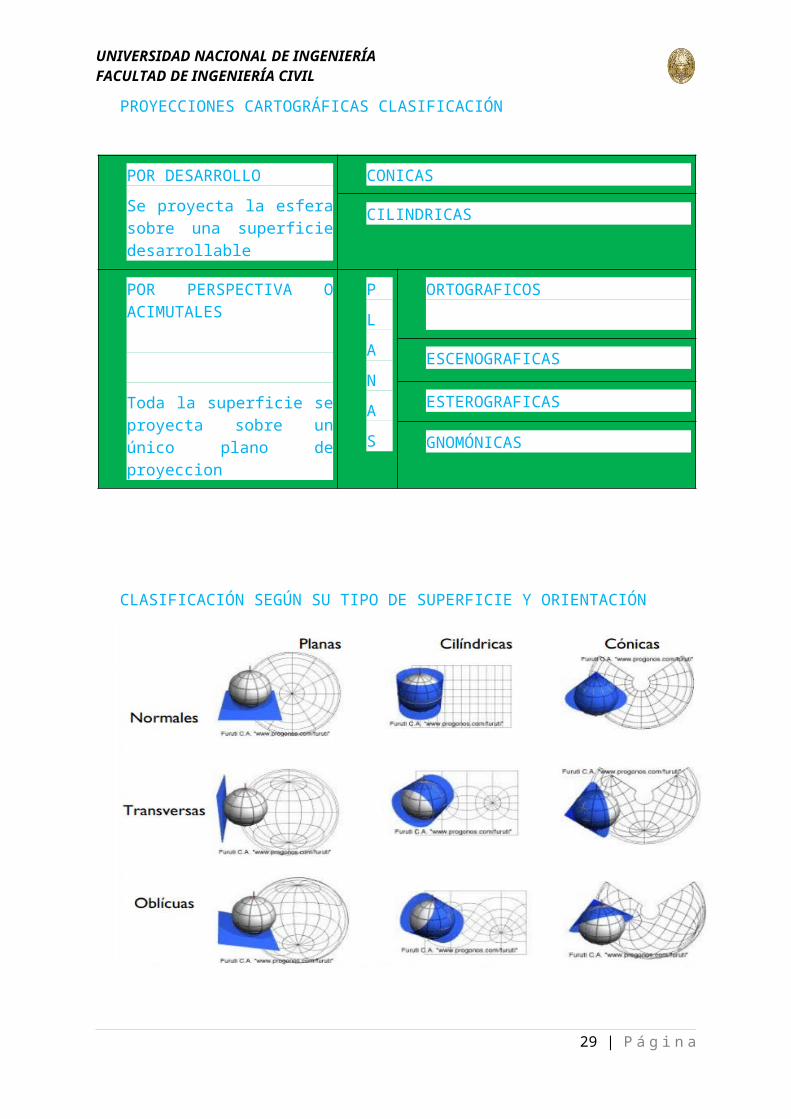
PROYECCIONES CARTOGRÁFICAS CLASIFICACIÓN
POR DESARROLLO
Se proyecta la esfera sobre
una superficie desarrollable
CONICAS
CILINDRICAS
POR PERSPECTIVA O
ACIMUTALES
Toda la superficie se
proyecta sobre un único
plano de proyeccion
P
L
A
N
A
S
ORTOGRAFICOS
ESCENOGRAFICAS
ESTEROGRAFICAS
GNOMÓNICAS
CLASIFICACIÓN SEGÚN SU TIPO DE SUPERFICIE Y ORIENTACIÓN
25 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
PROYECCIÓN CILÍNDRICA
Construida a partir de un cilindro: paralelos y meridianos son rectos
Permiten representar toda la superficie de la tierra
El sector con menor deformación es la línea ecuatorial
La más famosa es la proyección de mercator que revolucionó a la cartografía.
En ella se proyecta el globo terráqueo sobre un cilindro.
26 | P á g i n a

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
Es una de las más utilizadas aun cuando por lo general en en forma modificada,
debido a las grandes distorsiones que ofrece en las zonas de latitud elevada,
cosa que impide apreciar en sus verdaderas proporciones a las regiones
polares .
PROYECCIONES CÓNICAS
Proyección construida a partir de un cono: los meridianos se juntan en un punto
y los paralelos son curvos.
E útil para representar latitudes medias. A lo largo del paralelo que toca el cono
(tangente) se encuentra el sector con menos deformación
Se origina una distorsión asimétrica que afecta, en gran medida, a las zonas
polares, pero ofrece aceptable precisión en las zonas del hemisferio donde el
cono de proyección es tangente.
La imagen proyectada en la superficie cónica se “despliega”, resultando un
dibujo plano, de fácil reproducción en una hoja de papel.
Se utiliza, preferentemente, para representar aquellos paises que se encuentran
en las regiones de latitud medias, por ser menor la distorsion resultante.
27 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
PROYECIONES PLANAS
Construida a partir de un plano. Representan un hemisferio y su línea externa en
un círculo.
Puede ser polares, si uno de los polos está en el centro de la proyección; el
sector más preciso es alrededor del polo.
También pueden ser ecuatoriales cuando un punto de la línea ecuatorial ocupa
el centro de la proyección y, en las oblicuas, el centro corresponde a un punto
intermedio, entre un polo y el ecuador.
O pueden ser oblicuas cuando el centro corresponde a un punto intermedio,
entre polo y el ecuador.
28 | P á g i n a
UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA CIVIL
SISTEMA DE REFERENCIA GEODESICO
Un sistema de referencia geodésico es un recurso matemático que permite
asignar coordenadas a puntos sobre la superficie terrestre.
29 | P á g i n a
Related Documents











