1 3 PHASE INDUCTION MOTOR 1 PHASE OF 3 PHASE STATOR WINDING CAGE ROTOR AIR GAP STATOR MAGNETIC FIELD ROTOTATING AT SYNCHRONOUS SPEED ROTOR FOLLOWING STAOR FIELD S R S S R S N N N s n n n s

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
3 PHASE INDUCTION MOTOR
1 PHASE OF 3 PHASE STATOR WINDING
CAGE ROTOR
AIR GAPSTATOR
MAGNETIC FIELD ROTOTATING AT SYNCHRONOUS
SPEED
ROTOR FOLLOWING STAOR FIELD
S
RS
S
RS
NNNs
nnns

2
STEEL LAMINATIONS INSERTED BETWEEN ROTOR
BARS
COPPER ROTOR BARS
BARS BRAZED ONTO END RINGS
SQUIRREL CAGE ROTOR OF A 3 PHASE INDUCTION MOTOR.
INDUCTION MOTORS

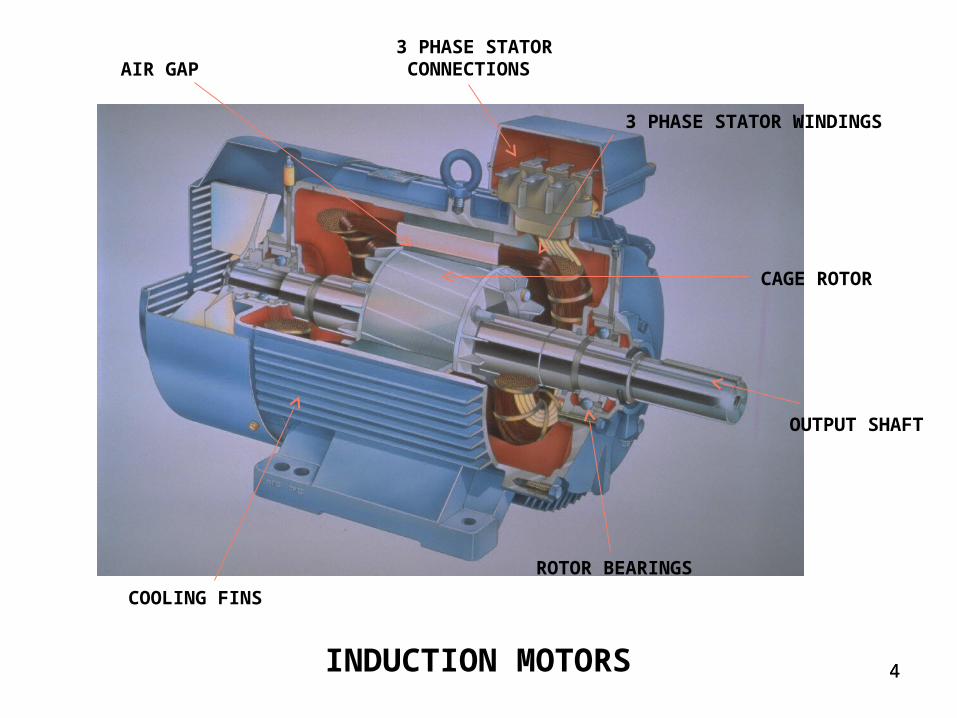
3
3 PHASE STATOR WINDINGS
3 PHASE STATOR CONNECTIONS
CAGE ROTOR
OUTPUT SHAFT
COOLING FINS
AIR GAP
ROTOR BEARINGS
44
3 PHASE STATOR WINDINGS
3 PHASE STATOR CONNECTIONS
CAGE ROTOR
OUTPUT SHAFT
COOLING FINS
AIR GAP
ROTOR BEARINGS
INDUCTION MOTORS

5
3 PHASE INDUCTION MOTOR
•THE 3 PHASE STATOR WINDINGS PRODUCE A MAGNETIC FIELD THAT ROTATES AT SYNCHRONOUS SPEED NS .
• f = SUPPLY FREQUENCY p = NUMBER OF MAGNETIC POLE PAIRS.
• THE ROTATING MAGNETIC FIELD INDUCES A CURRENT FLOW IN THE COPPER ROTOR BARS. THIS CURRENT CREATES A ROTOR MAGNETIC FIELD• ROTOR TORQUE IS PRODUCED BY THE INTERACTION OF THE STATOR AND ROTOR MAGNETIC FIELDS•THE ROTOR ACCELERATES UP TO A STEADY ROTOR SPEED NR .•THE ROTOR SPEED IS LESS THAN SYNCHRONOUS SPEED. •THE SPEED DIFFERENCE IS CALLED THE SLIP SPEED.•THE SLIP s IS DEFINED BY:
pfNS
S
RS
NNNs
66
V1
I2I1
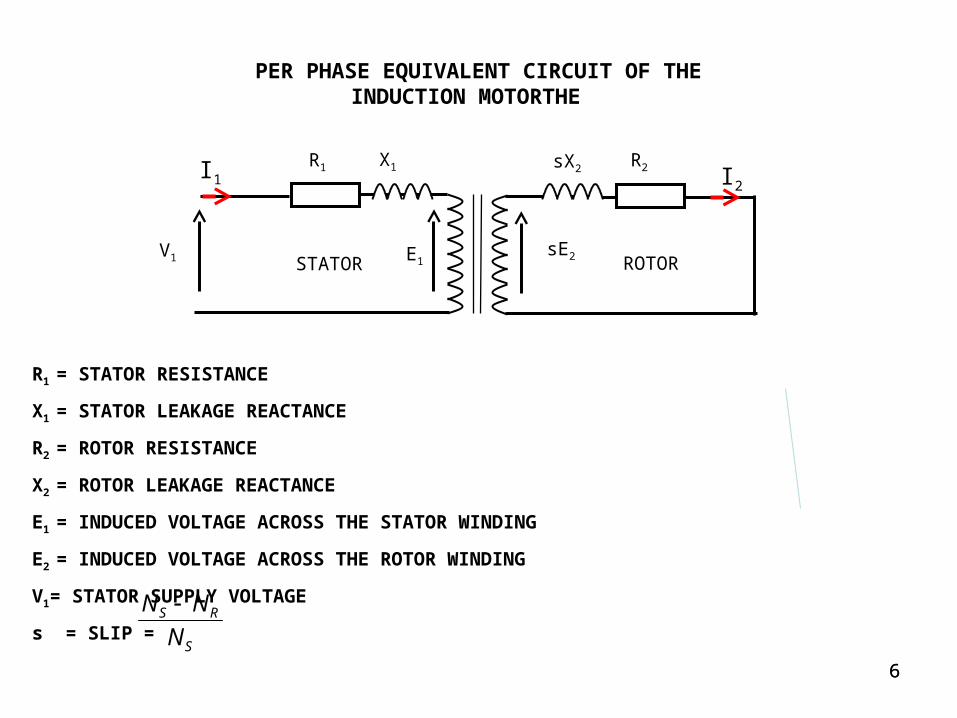
PER PHASE EQUIVALENT CIRCUIT OF THE INDUCTION MOTORTHE
R1 R2X1 sX2
E1sE2
R1 = STATOR RESISTANCEX1 = STATOR LEAKAGE REACTANCER2 = ROTOR RESISTANCEX2 = ROTOR LEAKAGE REACTANCEE1 = INDUCED VOLTAGE ACROSS THE STATOR WINDINGE2 = INDUCED VOLTAGE ACROSS THE ROTOR WINDINGV1= STATOR SUPPLY VOLTAGEs = SLIP =
STATOR ROTOR
S
RS
NNN

777
V1
I2I1
R1 X1 X2
E1E2
PER PHASE EQUIVALENT CIRCUIT OF THE INDUCTION MOTORTHE
sR2
STATOR ROTOR
22
2
22
22
jXsR
EjsXR
sEI

8888
V1
I2I1
R1 X1 X2
E1E2
PER PHASE EQUIVALENT CIRCUIT OF THE INDUCTION MOTORTHE
2R
)1(2 ssR
22
2
22
22
2
)1(
)1(
jXssRR
EI
ssRR
sR
STATOR ROTOR
99999
V1
I2I1
R1 X1 X2
E1E2
PER PHASE EQUIVALENT CIRCUIT OF THE INDUCTION MOTORTHE
2R
)1(2 ssR
POWERMECHANICALssRI
HEATASLOSSPOWERRI
ssRIRIPAG
)1()(
)(
)1()()(
222
22
2
2222
22
STATOR ROTOR
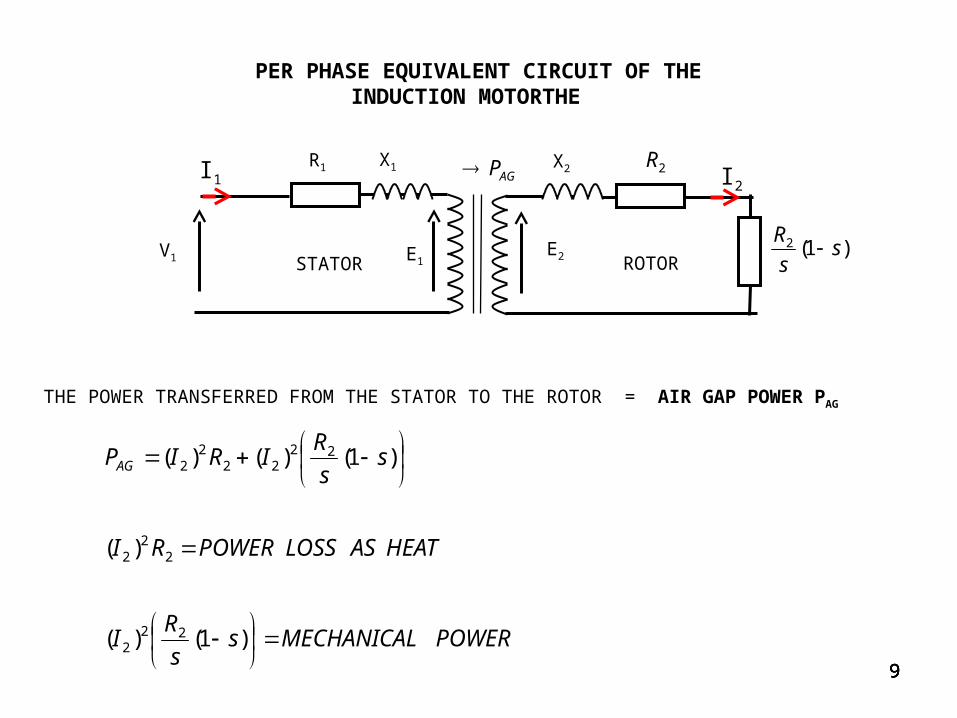
THE POWER TRANSFERRED FROM THE STATOR TO THE ROTOR = AIR GAP POWER PAG
AGP

101010101010
V1
I2I1
R1 X1 X2
E1E2
PER PHASE EQUIVALENT CIRCUIT OF THE INDUCTION MOTORTHE
2R
)1(2 ssR
AGM
AGLOSS
AG
PsssRIPOWERMECHANICALP
sPRIPHEATASLOSSPOWER
POWERGAPAIRsRIP
)1(1)(
)(
)(
222
22
2
222
STATOR ROTOR
AGP

11111111111111
V1
I2I1
R1 X1 X2
E1E2
PER PHASE EQUIVALENT CIRCUIT OF THE INDUCTION MOTORTHE
2R
)1(2 ssR
AG
AG
AG
PsPOWERMECHANICALTOTAL
sPHEATASLOSSPOWERLOSSCOPPERROTOR
PPOWERGAPAIR
)1(
STATOR ROTOR
AGP
IMPORTANT EQUATIONS :
12
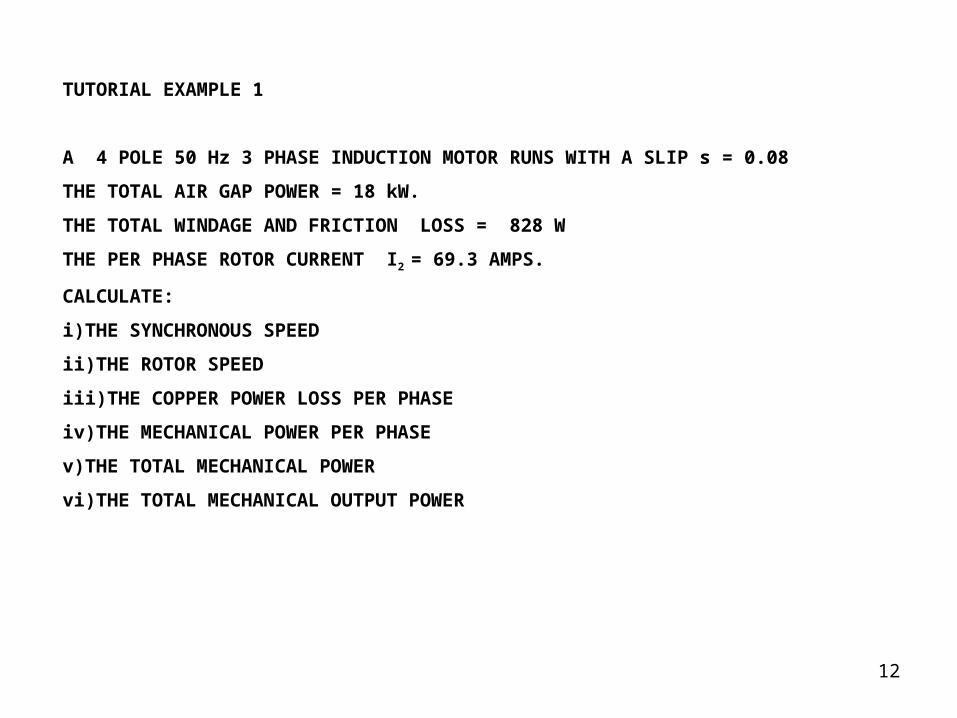
TUTORIAL EXAMPLE 1
A 4 POLE 50 Hz 3 PHASE INDUCTION MOTOR RUNS WITH A SLIP s = 0.08THE TOTAL AIR GAP POWER = 18 kW.THE TOTAL WINDAGE AND FRICTION LOSS = 828 WTHE PER PHASE ROTOR CURRENT I2 = 69.3 AMPS.CALCULATE: i)THE SYNCHRONOUS SPEEDii)THE ROTOR SPEEDiii)THE COPPER POWER LOSS PER PHASEiv)THE MECHANICAL POWER PER PHASEv)THE TOTAL MECHANICAL POWER vi)THE TOTAL MECHANICAL OUTPUT POWER

13
i) THE SYNCHRONOUS SPEED
ii) THE ROTOR SPEED
iii) THE COPPER POWER LOSS PER PHASE
RPMsNNNNNs SRS
RS 1380)08.01(1500)1(
WsPRIPHASEPERLOSSPOWERCOPPER AG 480600008.0)( 22
2
TUTORIAL EXAMPLE 1: SOLUTION
3POWERGAPAIRTOTAL
PHASEPERPOWERGAPAIRPAG
RPMN
pfN
S
S
150060250

1414
iv) THE MECHANICAL POWER PER PHASE
v) THE TOTAL MECHANICAL POWER
vi) THE TOTAL MECHANICAL OUTPUT = THE TOTAL MECHANICAL POWER – TOTAL WINDAGE AND FRICTION POWER LOSS
TUTORIAL EXAMPLE 1: SOLUTION
kWWPsPHASEPERPOWERMECHANICAL AG
52.555206000)08.01()1(
kWPOWERMECHANICALTOTAL 56.1652.53
kW732.15828.056.16
Related Documents











