Geometri Analit I. SISTEM KOORDINAT 1. Letak Titik pada Garis (R 1 ) Letak sebuah titik pada suatu garis lurus ditentukan oleh jarak titik tersebut terhadap sebuah titik yang disebut sebagai titik nol atau titik asal/origin yang diberi notasi O dan keberadaan titik di sebelah kiri atau sebelah kanan titik O. Dengan kata lain garis lurus tersebut dipandang sebagai garis bilangan. Sebuah titik dinyatakan dengan koordinat, misalkan titik A(3) berarti titik A terletak 3 satuan disebelah kanan titik O dan titik B(-4) berarti titik B terletak 4 satuan di sebelah kiri titik O, seperti direpresentasikan pada Gambar 1. Dimisalkan dua buah titik A(x1) dan B(x2), maka jarak titik A ke B adalah | x2- x1|. Pada Gambar 2 (a) x1< x2 dimana titik A(-2) dan B(3), maka jarak AB = |3-(-2)| = 5, dan pada Gambar 2 (b) x1> x2 dimana titik A(3) dan B(-4), maka jarak AB = |-4-3| = 7. LIN-FSM-UKSW/Geometri Analit Gambar 1. Letak Titik pada Garis Lurus Gambar 2. Jarak Dua Titik pada Garis 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Geometri Analit
I. SISTEM KOORDINAT
1. Letak Titik pada Garis (R1)
Letak sebuah titik pada suatu garis lurus ditentukan oleh
jarak titik tersebut terhadap sebuah titik yang disebut
sebagai titik nol atau titik asal/origin yang diberi notasi O
dan keberadaan titik di sebelah kiri atau sebelah kanan titik
O. Dengan kata lain garis lurus tersebut dipandang sebagai
garis bilangan. Sebuah titik dinyatakan dengan koordinat,
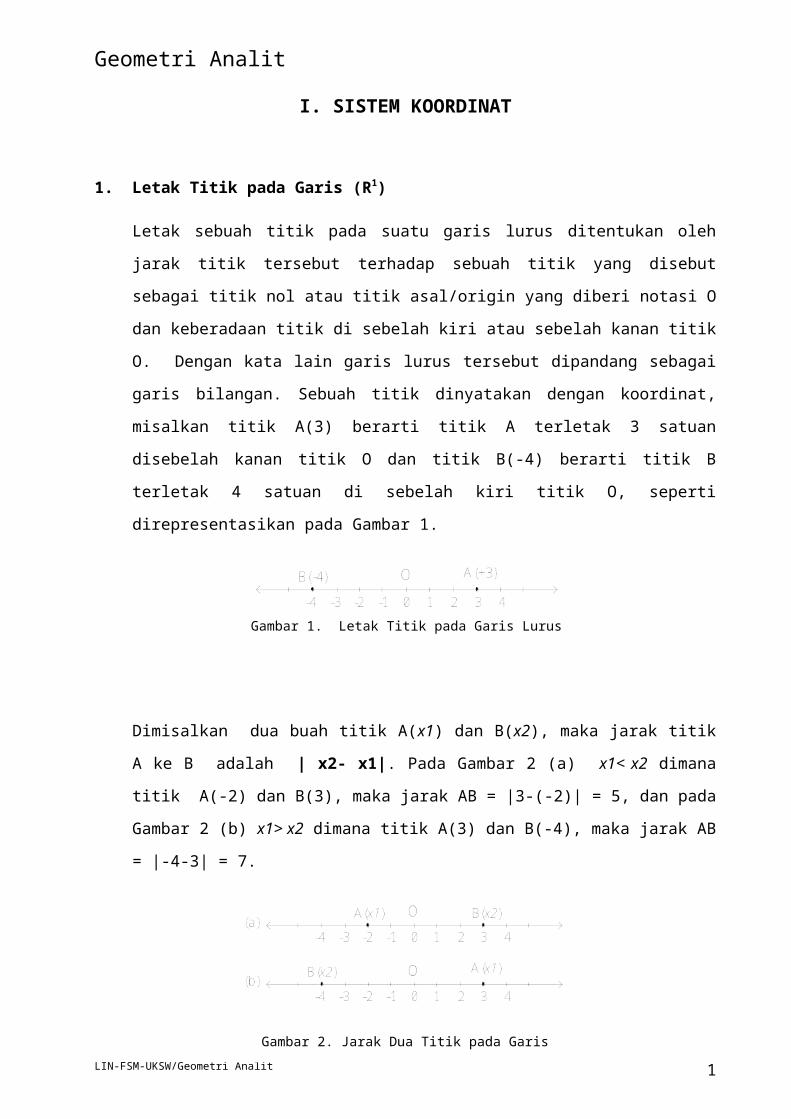
misalkan titik A(3) berarti titik A terletak 3 satuan
disebelah kanan titik O dan titik B(-4) berarti titik B
terletak 4 satuan di sebelah kiri titik O, seperti
direpresentasikan pada Gambar 1.
Dimisalkan dua buah titik A(x1) dan B(x2), maka jarak titik
A ke B adalah | x2- x1|. Pada Gambar 2 (a) x1< x2 dimana
titik A(-2) dan B(3), maka jarak AB = |3-(-2)| = 5, dan pada
Gambar 2 (b) x1> x2 dimana titik A(3) dan B(-4), maka jarak AB
= |-4-3| = 7.
LIN-FSM-UKSW/Geometri Analit
Gambar 1. Letak Titik pada Garis Lurus
Gambar 2. Jarak Dua Titik pada Garis
1
Geometri Analit
2. Letak Titik pada Bidang (R2)
Untuk menentukan letak titik pada bidang datar (R2),
digunakan sistem koordinat, diantaranya Sistem Koordinat
Kartesius, yang terdiri dari dua buah garis bilangan yang
saling berpotongan. Garis mendatar disebut sumbu-X dan garis
vertikal disebut sumbu-Y. Kedua sumbu berpotongan di sebuah
titik yang disebut sebagai titik asal atau titik origin yang
biasanya dinotasikan dengan O. Sistem Koordinat Kartesius
dengan sumbu-sumbu yang saling tegak lurus direpresentasikan
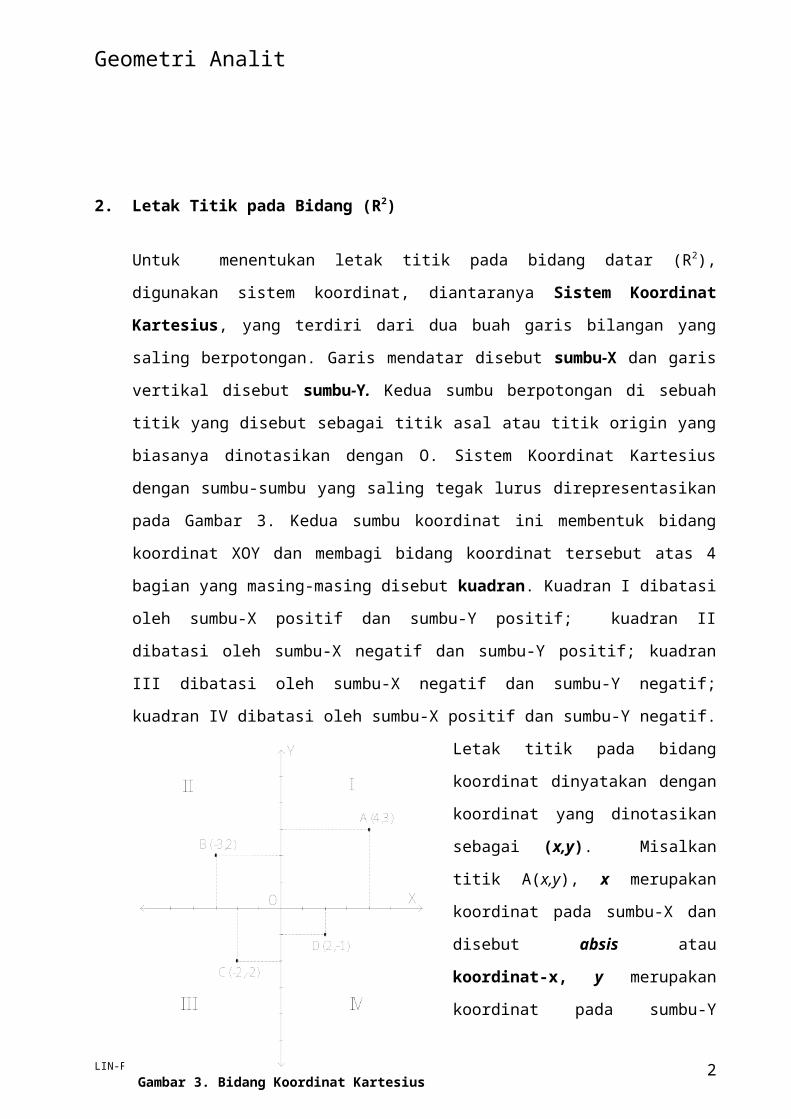
pada Gambar 3. Kedua sumbu koordinat ini membentuk bidang
koordinat XOY dan membagi bidang koordinat tersebut atas 4
bagian yang masing-masing disebut kuadran. Kuadran I dibatasi
oleh sumbu-X positif dan sumbu-Y positif; kuadran II
dibatasi oleh sumbu-X negatif dan sumbu-Y positif; kuadran
III dibatasi oleh sumbu-X negatif dan sumbu-Y negatif;
kuadran IV dibatasi oleh sumbu-X positif dan sumbu-Y negatif.
Letak titik pada bidang
koordinat dinyatakan dengan
koordinat yang dinotasikan
sebagai (x,y). Misalkan
titik A(x,y), x merupakan
koordinat pada sumbu-X dan
disebut absis atau
koordinat-x, y merupakan
koordinat pada sumbu-Y
LIN-FSM-UKSW/Geometri AnalitGambar 3. Bidang Koordinat Kartesius
2
Geometri Analit
disebut ordinat atau
koordinat-y. Titik O
mempunyai koordinat (0,0).
Pada Gambar 3. terlihat
beberapa contoh koordinat
titik yaitu A(4,3) di
kuadran I, B(-3,2) di
kuadran II, C(-2,-2) di
kuadran III dan D(2,-1) di
kuadran IV.
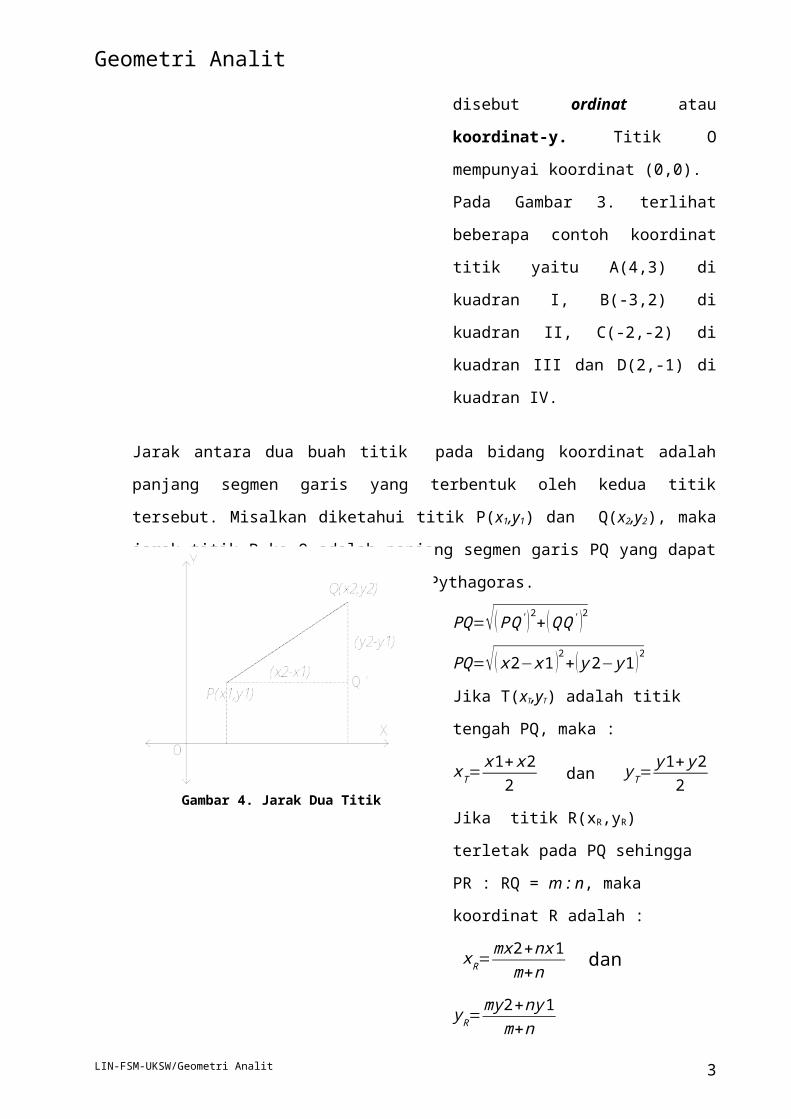
Jarak antara dua buah titik pada bidang koordinat adalah
panjang segmen garis yang terbentuk oleh kedua titik
tersebut. Misalkan diketahui titik P(x1,y1) dan Q(x2,y2), maka
jarak titik P ke Q adalah panjang segmen garis PQ yang dapat
ditentukan berdasarkan teorema Pythagoras.
PQ=√(PQ')2+(QQ' )2
PQ=√(x2−x1 )2+(y2−y1)2
Jika T(xT,yT) adalah titik
tengah PQ, maka :
xT=x1+x2
2 dan yT=y1+y2
2
Jika titik R(xR,yR)
terletak pada PQ sehingga
PR : RQ = m : n, maka
koordinat R adalah :
xR=mx2+nx1
m+n dan
yR=my2+ny1
m+n
LIN-FSM-UKSW/Geometri Analit
Gambar 4. Jarak Dua Titik
3
Geometri Analit
Jika mn=λ , maka koordinat R menjadi xR=
x1+λx21+λ dan
yR=y1+λy21+λ
Contoh:
Diketahui titik A(-3,1) dan B(5,7), maka panjang AB =
√ (5−(−3))2+(7−1 )2 = 10. Jika P terletak ditengah-tengan AB,
maka koordinat P yaitu xP=(-3+5)/2=1, yP=(1+7)/2=4 atau
P(1,4). Jika titik R terletak pada segmen garis AB sedemikian
sehingga AR:RB=2:3, maka koordinat R adalah
xR=(2.5+3.-3)/(2+3)=1/5, yP=(2.7+3.1)/(2+3)=32/5 atau R(1/5,
32/5).
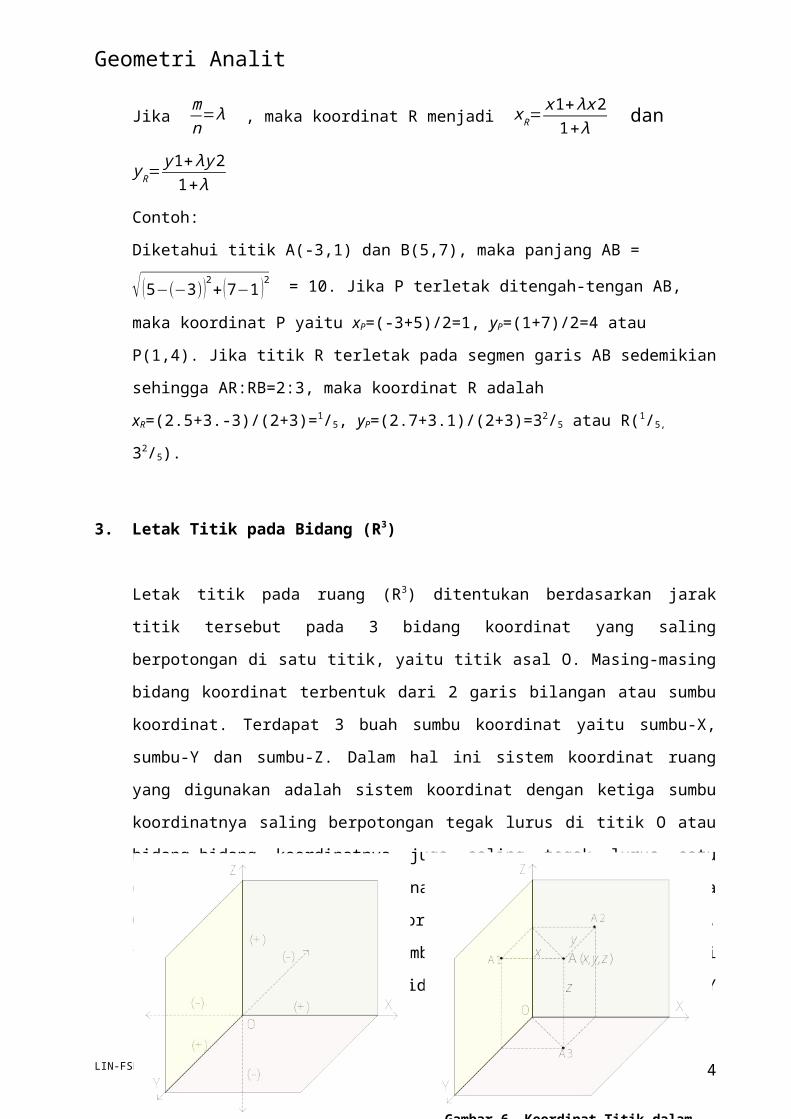
3. Letak Titik pada Bidang (R3)
Letak titik pada ruang (R3) ditentukan berdasarkan jarak
titik tersebut pada 3 bidang koordinat yang saling
berpotongan di satu titik, yaitu titik asal O. Masing-masing
bidang koordinat terbentuk dari 2 garis bilangan atau sumbu
koordinat. Terdapat 3 buah sumbu koordinat yaitu sumbu-X,
sumbu-Y dan sumbu-Z. Dalam hal ini sistem koordinat ruang
yang digunakan adalah sistem koordinat dengan ketiga sumbu
koordinatnya saling berpotongan tegak lurus di titik O atau
bidang-bidang koordinatnya juga saling tegak lurus satu
dengan lainnya. Sistem koordinat ruang direpresentasikan pada
Gambar 5. Tiga bidang koordinatnya adalah bidang XOY,
terbentuk dari sumbu-X dan sumbu-Y, bidang XOZ terbentuk dari
sumbu-X dan sumbu-Z serta bidangYOZ terbentuk dari sumbu-Y
LIN-FSM-UKSW/Geometri Analit
Gambar 6. Koordinat Titik dalam
4
Geometri Analit
dan sumbu-Z. Bidang-bidang koordinat ini membagi ruang atas 8
buah kuadran.
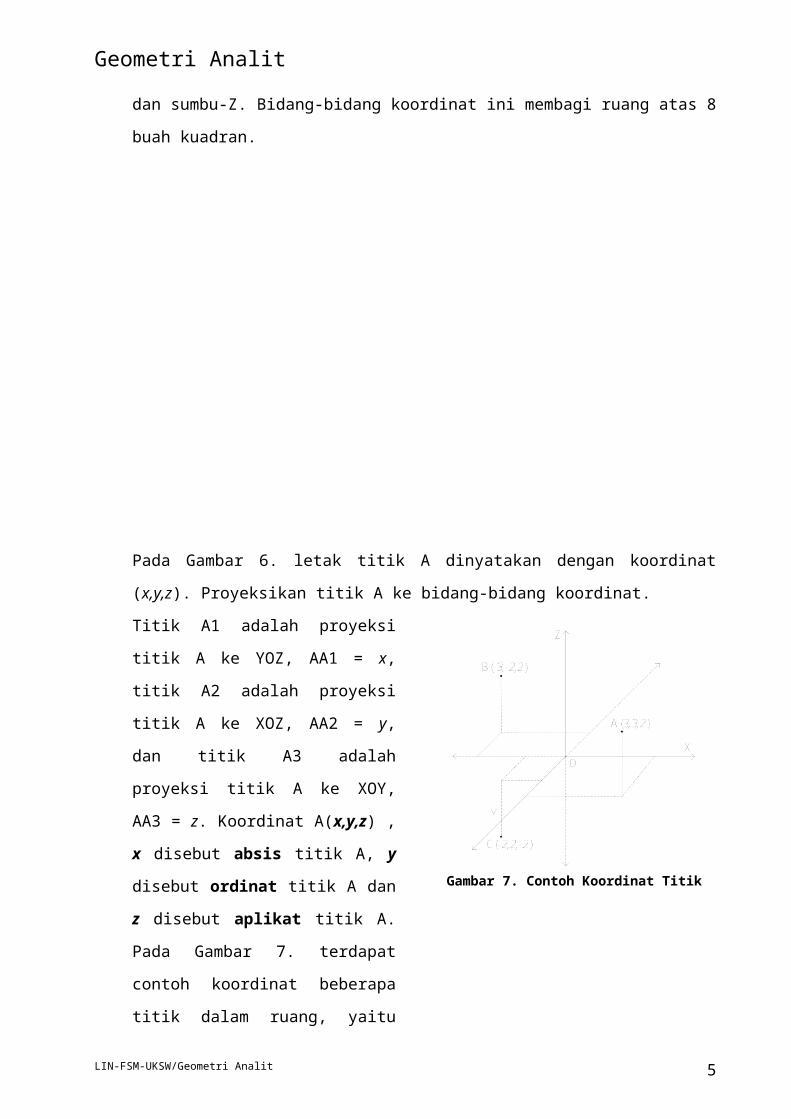
Pada Gambar 6. letak titik A dinyatakan dengan koordinat
(x,y,z). Proyeksikan titik A ke bidang-bidang koordinat.
Titik A1 adalah proyeksi
titik A ke YOZ, AA1 = x,
titik A2 adalah proyeksi
titik A ke XOZ, AA2 = y,
dan titik A3 adalah
proyeksi titik A ke XOY,
AA3 = z. Koordinat A(x,y,z) ,
x disebut absis titik A, y
disebut ordinat titik A dan
z disebut aplikat titik A.
Pada Gambar 7. terdapat
contoh koordinat beberapa
titik dalam ruang, yaitu
LIN-FSM-UKSW/Geometri Analit
Gambar 6. Koordinat Titik dalam
Gambar 7. Contoh Koordinat Titikdalam Ruang
5
Geometri Analit
A(3,3,2), B(-3,-2,2) dan
C(-2,2,-2).
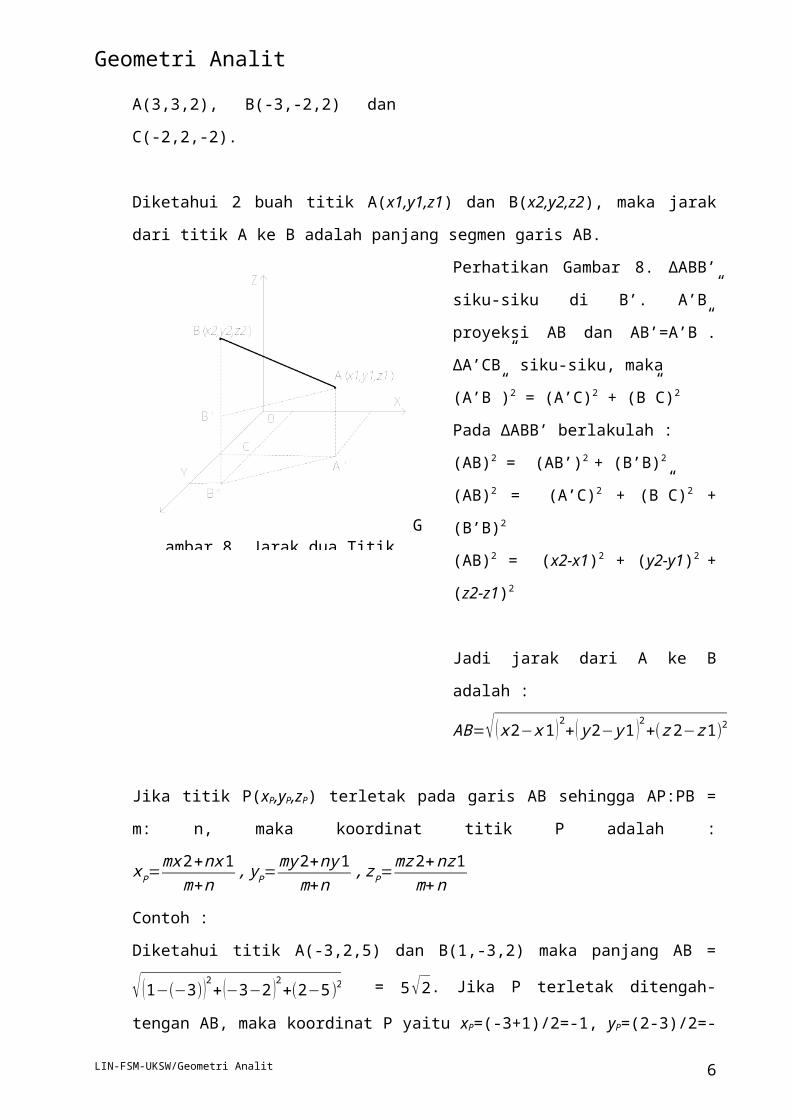
Diketahui 2 buah titik A(x1,y1,z1) dan B(x2,y2,z2), maka jarak
dari titik A ke B adalah panjang segmen garis AB.
Perhatikan Gambar 8. ∆ABB’
siku-siku di B’. A’B”
proyeksi AB dan AB’=A’B”.
∆A’CB” siku-siku, maka
(A’B”)2 = (A’C)2 + (B”C)2
Pada ∆ABB’ berlakulah :
(AB)2 = (AB’)2 + (B’B)2
(AB)2 = (A’C)2 + (B”C)2 +
(B’B)2
(AB)2 = (x2-x1)2 + (y2-y1)2 +
(z2-z1)2
Jadi jarak dari A ke B
adalah :
AB=√ (x2−x1)2+(y2−y1 )2+(z2−z1)2
Jika titik P(xP,yP,zP) terletak pada garis AB sehingga AP:PB =
m: n, maka koordinat titik P adalah :
xP=mx2+nx1
m+n,yP=
my2+ny1m+n
,zP=mz2+nz1
m+nContoh :
Diketahui titik A(-3,2,5) dan B(1,-3,2) maka panjang AB =
√ (1−(−3))2+(−3−2 )2+(2−5)2 = 5√2. Jika P terletak ditengah-tengan AB, maka koordinat P yaitu xP=(-3+1)/2=-1, yP=(2-3)/2=-
LIN-FSM-UKSW/Geometri Analit
Gambar 8. Jarak dua Titik
6
Geometri Analit
½, zP=(5-2)/2=1½ atau P(-1, -½, 1½). Jika titik R terletak
pada segmen garis AB sedemikian sehingga AR:RB=2:3, maka
koordinat R adalah xR=(2.1+3.-3)/(2+3)= -12/5,
yP=(2.-3+3.2)/(2+3)=0, zP=(2.2+3.5)/(2+3) = 34/5 atau R(-12/5,
0, 34/5).
4. Transformasi Koordinat
4.1 Translasi sumbu koordinat
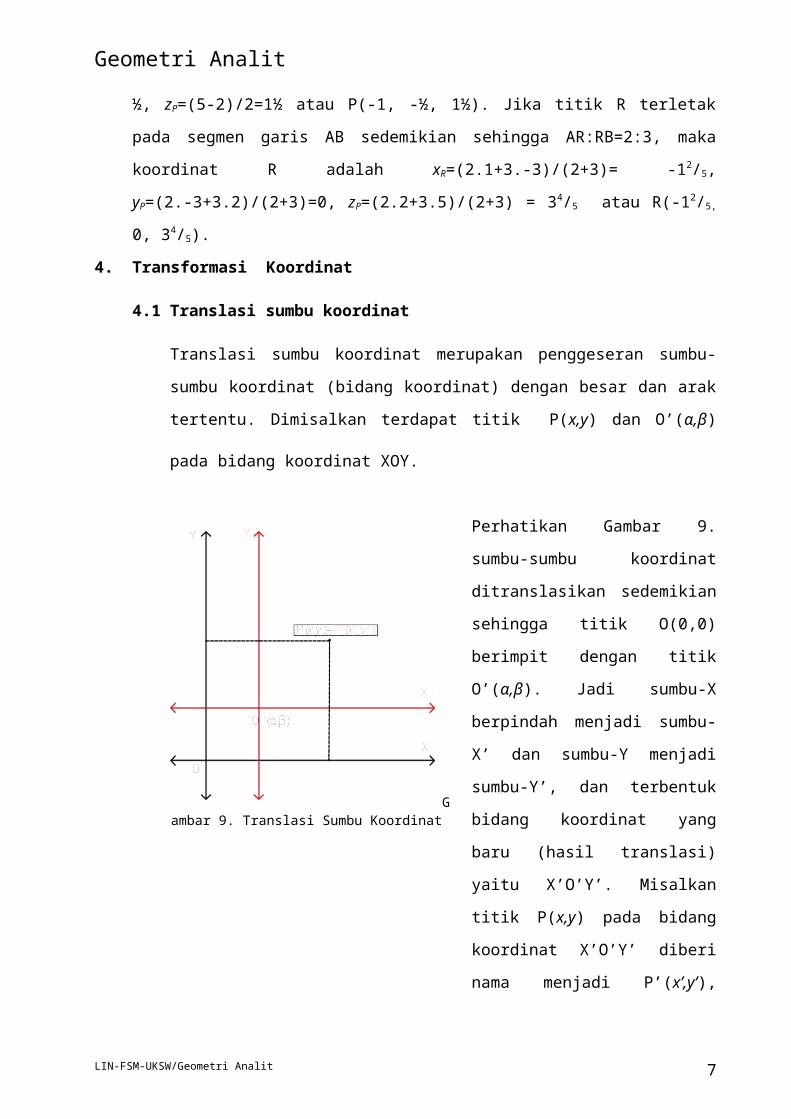
Translasi sumbu koordinat merupakan penggeseran sumbu-
sumbu koordinat (bidang koordinat) dengan besar dan arak
tertentu. Dimisalkan terdapat titik P(x,y) dan O’(α,β)
pada bidang koordinat XOY.
Perhatikan Gambar 9.
sumbu-sumbu koordinat
ditranslasikan sedemikian
sehingga titik O(0,0)
berimpit dengan titik
O’(α,β). Jadi sumbu-X
berpindah menjadi sumbu-
X’ dan sumbu-Y menjadi
sumbu-Y’, dan terbentuk
bidang koordinat yang
baru (hasil translasi)
yaitu X’O’Y’. Misalkan
titik P(x,y) pada bidang
koordinat X’O’Y’ diberi
nama menjadi P’(x’,y’),
LIN-FSM-UKSW/Geometri Analit
Gambar 9. Translasi Sumbu Koordinat
7
Geometri Analit
maka koordinat P’
adalah :
x’ = x – α dan y’ = y –
β
Contoh :
Titik P(6,8) pada sistem XOY.
Jika O digeser menjadi O’(2,1), maka koordinat P pada
sistem koordinat yang baru adalah x’ = x – α = 6 -2 =
4
y’ = y – β = 8 -1 = 7
jadi : P’(4,7)
Jika O digeser menjadi O`(-3,-5), maka koordinat P
pada sistem koordinat yang baru adalah : x’ = 6 – (-
3) = 9
y’ = 8 – (-5) = 13
jadi : P’(9,13)
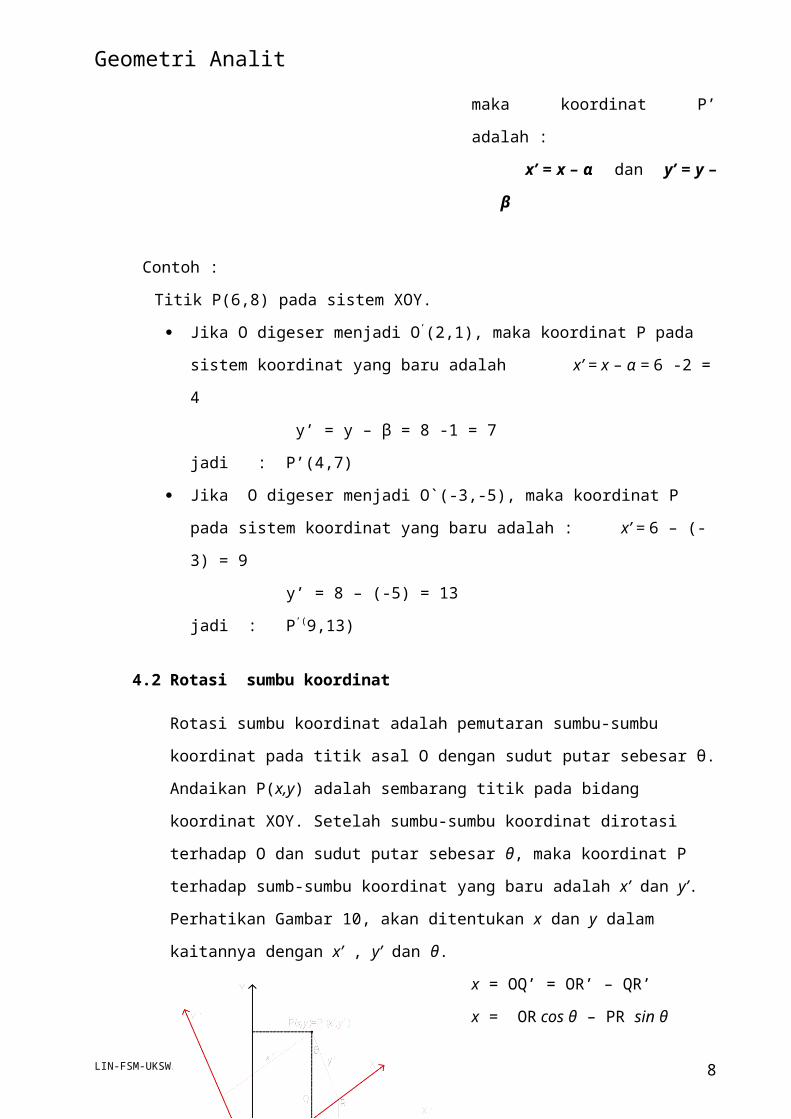
4.2 Rotasi sumbu koordinat
Rotasi sumbu koordinat adalah pemutaran sumbu-sumbu
koordinat pada titik asal O dengan sudut putar sebesar θ.
Andaikan P(x,y) adalah sembarang titik pada bidang
koordinat XOY. Setelah sumbu-sumbu koordinat dirotasi
terhadap O dan sudut putar sebesar θ, maka koordinat P
terhadap sumb-sumbu koordinat yang baru adalah x’ dan y’.
Perhatikan Gambar 10, akan ditentukan x dan y dalam
kaitannya dengan x’ , y’ dan θ.
x = OQ’ = OR’ – QR’
x = OR cos θ – PR sin θ
LIN-FSM-UKSW/Geometri Analit 8
Geometri Analit
x = x’cos θ – y’sin θ
y = Q’P = Q’Q + QP = R’R
+ QP
y = OR sin θ + PR cos θ
y = x’sin θ + y’cos θ
Contoh : Koordinat P(3,5)
pada bidang koordinat
hasil perputaran sumbu-
sumbu koordinat terhadap
O sebesar θ =450, adalah :
x = x’cos θ – y’sin θ y = x’sin θ + y’cos θ
3 = x’cos 450 – y’sin 450 5 = x’sin 450 + y’cos 450
3= ½√2 x’ - ½√2 y’ …(1) 5= ½√2 x’ + ½√2 y’ …(2)
Dari persamaan (1) dan (2) diperoleh (x’,y’) = (4√2, √2).
Jadi titik P pada bidang koordinat yang baru mempunyai
koordinat P(4√2, √2).
LIN-FSM-UKSW/Geometri Analit 9
Y
O
P(x1,y1)
X
Gambar 6.
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
Geometri Analit
II. GARIS LURUS
1. Garis Lurus
Sebuah garis lurus dapat dinyatakan dalam bentuk persamaan
yang menyatakan hubungan tetap antara koordinat-koordinat
semua titik yang terletak pada garis tersebut. Hubungan
tersebut dinyatakan dalam bentuk fungsi linear, dimana y
sebagai peubah tak bebas dan x sebagai peubah bebas. Dengan
kata lain bahwa setiap koordinat titik pada garis tersebut
harus memenuhi persamaan garisnya.
Persamaan garis dapat dinyatakan dalam bentuk
eksplisit, yaitu : y = mx
+ n
implisit, yaitu : Ax +
By + C = 0
Persamaan garis bentuk eksplisit dapat diubah ke bentuk
implisit dan sebaliknya, dengan memperhatikan hubungan :
m=−AB
dan n=−CB
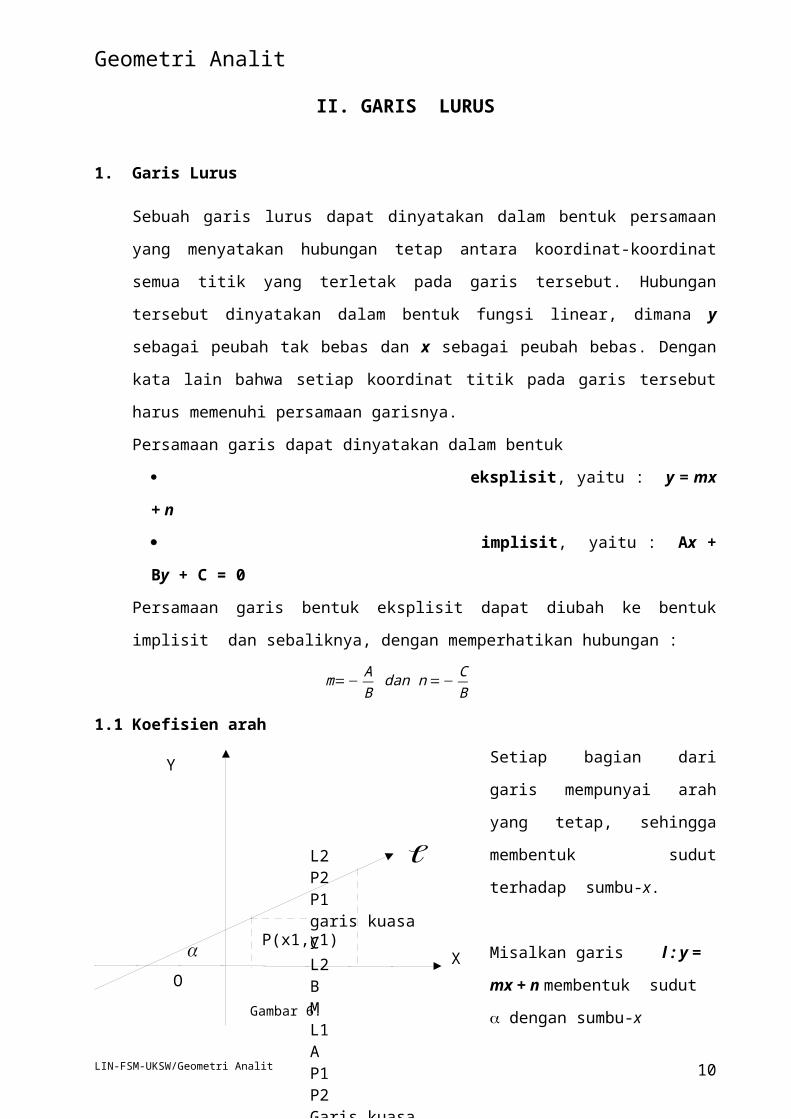
1.1 Koefisien arah
Setiap bagian dari
garis mempunyai arah
yang tetap, sehingga
membentuk sudut
terhadap sumbu-x.
Misalkan garis l : y =
mx + n membentuk sudut
dengan sumbu-x
LIN-FSM-UKSW/Geometri Analit 10
y = mx
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
Y
O
P(x,y)
X
Gambar 6.
Geometri Analit
positif. m disebut koefisien arah atau gradient dari garis l,
dimana
m = tg
diukur dari sumbu-x positif berlawanan dengan arah jarum
jam ke garis l (0o<=<180o)
Jika titik P(x1,y1) dan Q(x2,y2) terletak pada garis l maka
koefisien arahnya :
m = tg α =
y2−y1x2−x1
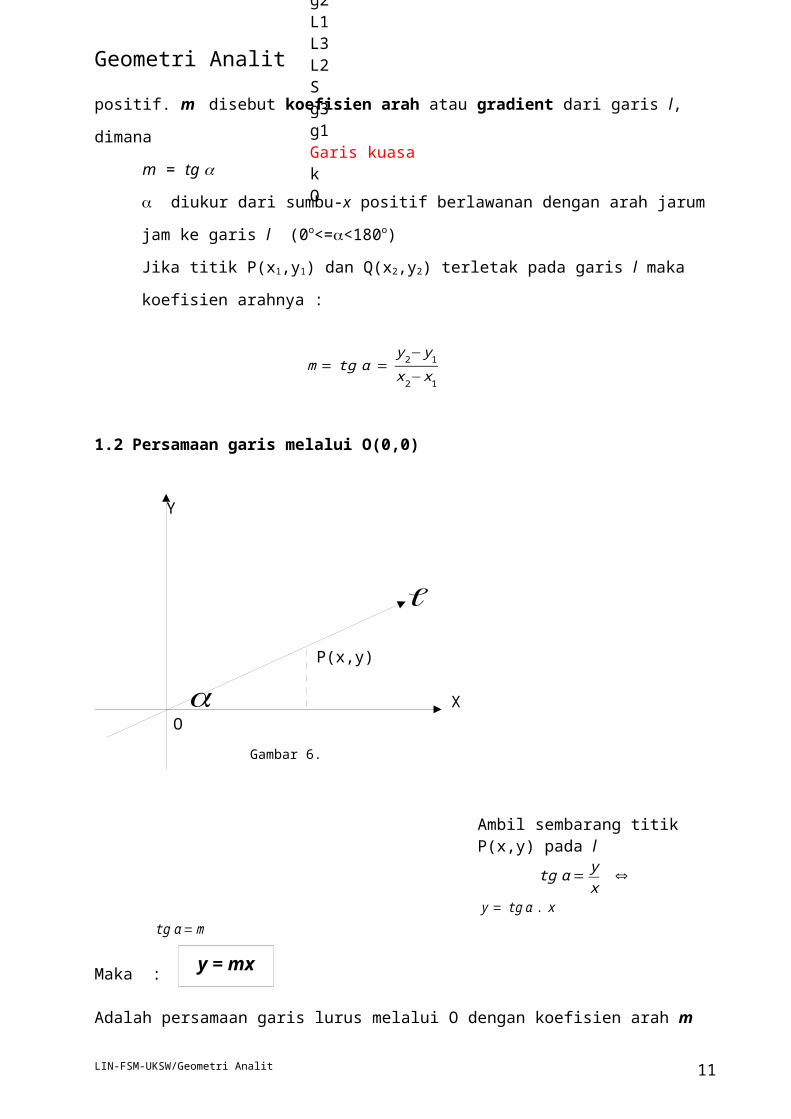
1.2 Persamaan garis melalui O(0,0)
Ambil sembarang titik P(x,y) pada l
tg α=
yx
⇔
y = tg α . x tg α= m
Maka :
Adalah persamaan garis lurus melalui O dengan koefisien arah m
LIN-FSM-UKSW/Geometri Analit 11
x
x
O’= P(x1,y1)
OGambar 7.
Geometri Analit
1.3 Persamaan garis melalui (0,n) dan koefisien arah m
Translasikan sumbu koordinat XOY hingga titik O(0,0) berimpitdengan O`(0,n), maka persamaan garis melalui O’ pada sistem koordinat yang baru adalah :
y= m xsedang x= x−0= x dan y= y− n . Substitusikan x dan y paday= m x .Diperoleh y−n= mx atau y=mx+n
Jadi y = mx + n adalah persamaan garis yang melalui (memotong sumbu-y di ) titik (0,n) dan memotong sumbu-x di (–n/m,0)
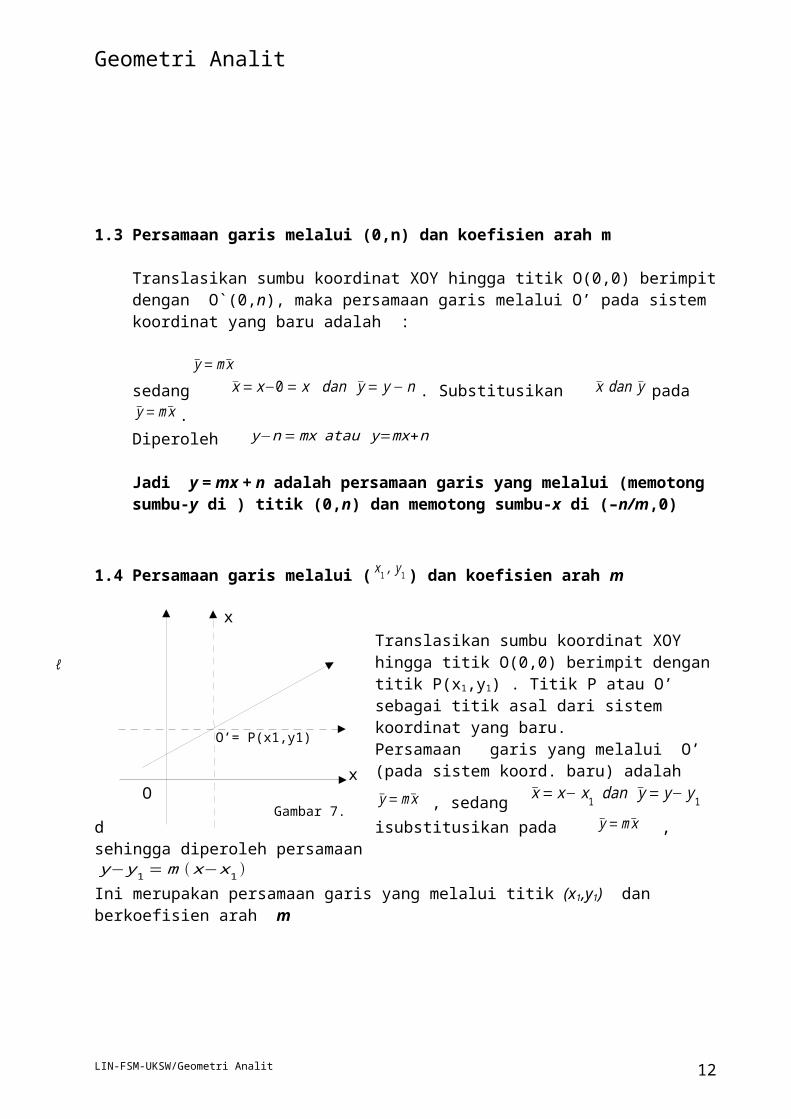
1.4 Persamaan garis melalui ( x1, y1 ) dan koefisien arah m
Translasikan sumbu koordinat XOY hingga titik O(0,0) berimpit dengantitik P(x1,y1) . Titik P atau O’ sebagai titik asal dari sistem koordinat yang baru. Persamaan garis yang melalui O’ (pada sistem koord. baru) adalahy= m x , sedang x= x− x1 dan y= y− y1
d isubstitusikan pada y= m x , sehingga diperoleh persamaany−y1= m (x−x1)Ini merupakan persamaan garis yang melalui titik (x1,y1) dan berkoefisien arah m
LIN-FSM-UKSW/Geometri Analit
ℓ
12

),( 22 yx
),( 11 yx 12 yy
12 xx
Gambar 8O
21
1
12
2
Gambar 9O
Geometri Analit
a. Persamaan garis melalui (x1,y1) dan (x2,y2)
Persamaan garis melalui (x1,y1) dan berkoefisien arah m adalah
:y−y1= m (x−x1 )Koefisien arah dari garis yang melalui (x1,y1) dan (x2,y2) adalah
:
m = tg α =
y2−y1x2−x1
Jadi y−y1 =
y2−y1x2−x1
( x−x1)
atau
Syarat (x1,y1) , (x2,y2) dan (x3,y3) terletak segaris adalah :
y3−y1y2−y1
=x3−x1x2−x1
2. Sudut Antara Dua Garis
Buat garis ℓ1 // ℓ1 dan ℓ2 // ℓ2 yang melalui O, sehingga diperoleh α1 : sudut antara ℓ1 dengan sumbu-xpositifα2 : sudut antara ℓ2 dengan sumbu-x positif ϕ : sudut antara ℓ1 dan ℓ2 ,ϕ= α1−α2 Koefisien arah ℓ1= m1=tg α1
Koefisien arah ℓ2= m2=tg α2
LIN-FSM-UKSW/Geometri Analit
ℓ
y−y1y2−y1
=x−x1x2−x1
13

Geometri Analit
Karena ϕ= α1−α2 , maka tg ϕ= tg (α1−α2)=
tgα1−tgα21+tgα1 tgα2
atau tg ϕ=
m1−m21+m1 m2
Jika ℓ1 // ℓ2 → α1= α2 , ϕ = 0o
tg 00=m1−m21 + m1 m2
0=m1−m21 + m1 m2
⇒ m1= m2
Jika ℓ1 ⊥ ℓ2 → ϕ = 90∘
tg 90∘=m1−m21 + m1 m2
∞ =m1−m21 + m1 m2
1 +m1 m2 = 0m1 m2 =− 1
3. Titik-potong Dua Garis
Misalkan diketahui dua buah garis k dan l, akan ditentukantitik potong kedua garis tersebut. Titik potong kedua garis kdan l berarti suatu titik yang terletak pada garis k dansekalugus terletak pada garis l atau dengan kata lainmerupakan titik persekutuan antara garis k dan l atauhimpunan penyelesaian dari sistem persamaan linear daripersamaan garis k dan l
k : ax + by + c = 0 ⇔ ax + by = - cl : px + qy + r = 0 ⇔ px + qy = - r
x=|−c b−r q|
|a bp q |
=−cq + braq − bp
y=|a −cp −r|
|a bp q |
=−ar + cpaq− bp
LIN-FSM-UKSW/Geometri Analit 14
Geometri Analit
Contoh : 2x + y – 4 = 0 x + 3y + 5 = 0
x=|4 1−5 3
|
|2 11 3 |
=12 + 56− 1 =
175
y=|2 41 −5
|
|2 11 3
|=−10−46− 1
=−145
LIN-FSM-UKSW/Geometri Analit 15

b
O
B(0,b)
aA(a,0)
t
Gambar 10
Geometri Analit
4. Bentuk lain Persamaan garis
4.1 Persamaan Normal Hesse
Persamaan garis yang melalui A(a,0)dan B(0,b) adalah :
y−0b−0 =
x−a0−a
yb
=x−a−a
yb =−
xa +1
yb+xa= 1
Jika t adalah jarak garis AB ke O , maka
cos α =ta ⇔ a=
tcos α
sin α =tb
⇔ b=tsin α
yt /sin α +
yt /cos α = 1 ⇔
y sin αt +
y cos αt =1
Jadi x cos α + y sin α = t (t= 0 atau positif ) Adalah persamaan garis dalam bentuk Normal Hesse
Bagaimanakah persamaan garis ax + by + c = 0 dalam bentuk normal ?
LIN-FSM-UKSW/Geometri Analit 16
b
a
Q(x,y)
t
),( 11 yxP
X
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
Y
Geometri Analit
ax + by + c = 0 → x cos α + y sin α − t= 0akx + bky + ck = 0ak = cos α → cos2 α = a2k2
bk = sin α sin2 α = b2k2sin2 α + cos2 α = k2 (a2 + b2)
1 = k2 (a2 + b2)k2= 1
a2 + b2atau k =
1±√a2 + b2
, sehingga
a±√a2 + b2
x +b±√a2 + b2
y +c±√a2 + b2
= 0
atau ax + by + c±√a2 + b2
= 0 ⇒ Persamaan garis lurus bentuk Normal Hesse
Tanda + atau – dipilih dengan mengingat bahwa suku ke-3harus negatif sebab t = -kc dan t ≥ 0
Contoh :
1) Ubah persamaan berikut ke dalam bentuk Normal Hesse : 3x – 4y + 7 = 0
k =1±√9 + 16
=1±√25
=1± 5
dipilih k negatif agar t positif
3x−5
−4y−5
+7−5
= 0 atau −3x5
+4y5
−75= 0
2) 2x + 5y – 6 = 0 k =
1±√4 + 25
=1±√29
2x√29
+4y√29
−7√29
= 0
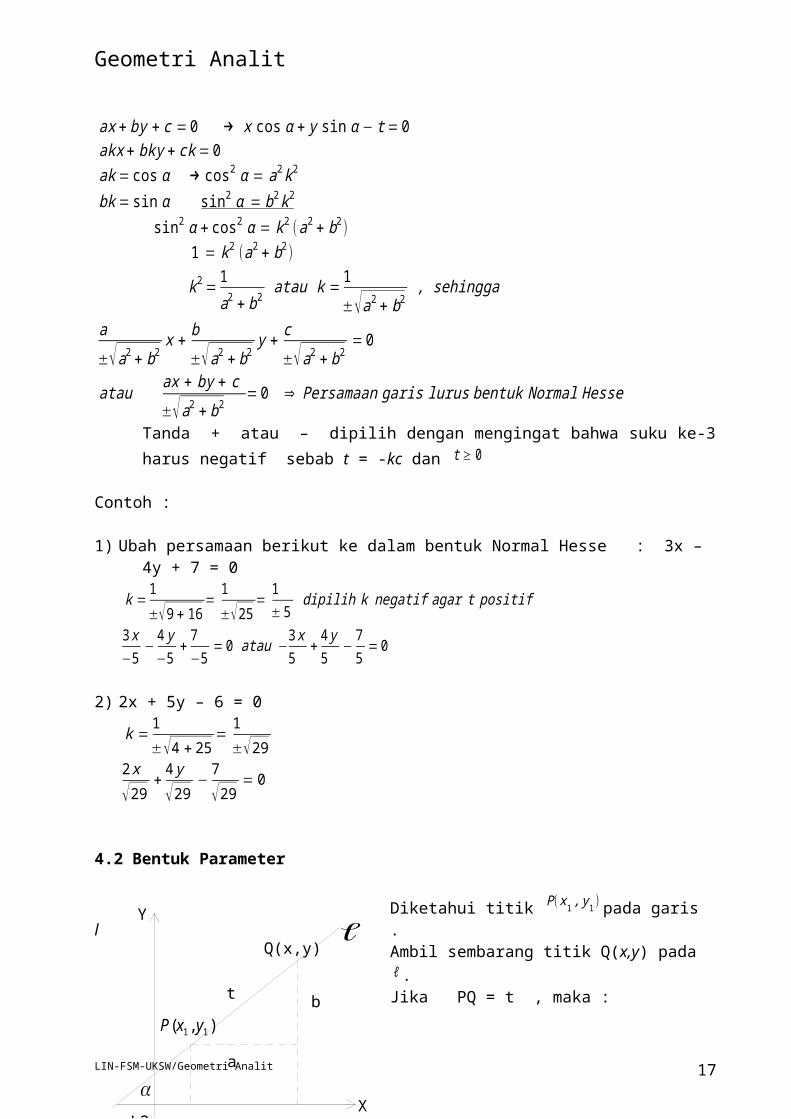
4.2 Bentuk Parameter
Diketahui titik P(x1,y1 ) pada garis l .
Ambil sembarang titik Q(x,y) padaℓ .Jika PQ = t , maka :
LIN-FSM-UKSW/Geometri Analit 17
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
O
),( 11 yxP
t
d
'
Y
X
Geometri Analit
a= t cos αb= t sin α
sehingga
x=x1+a =x1+t cos αy=y1+b =y1+t sin α
Didapat Persamaan parameter garis l adalah :
:{x=x1+t cos αy=y1+t sin α
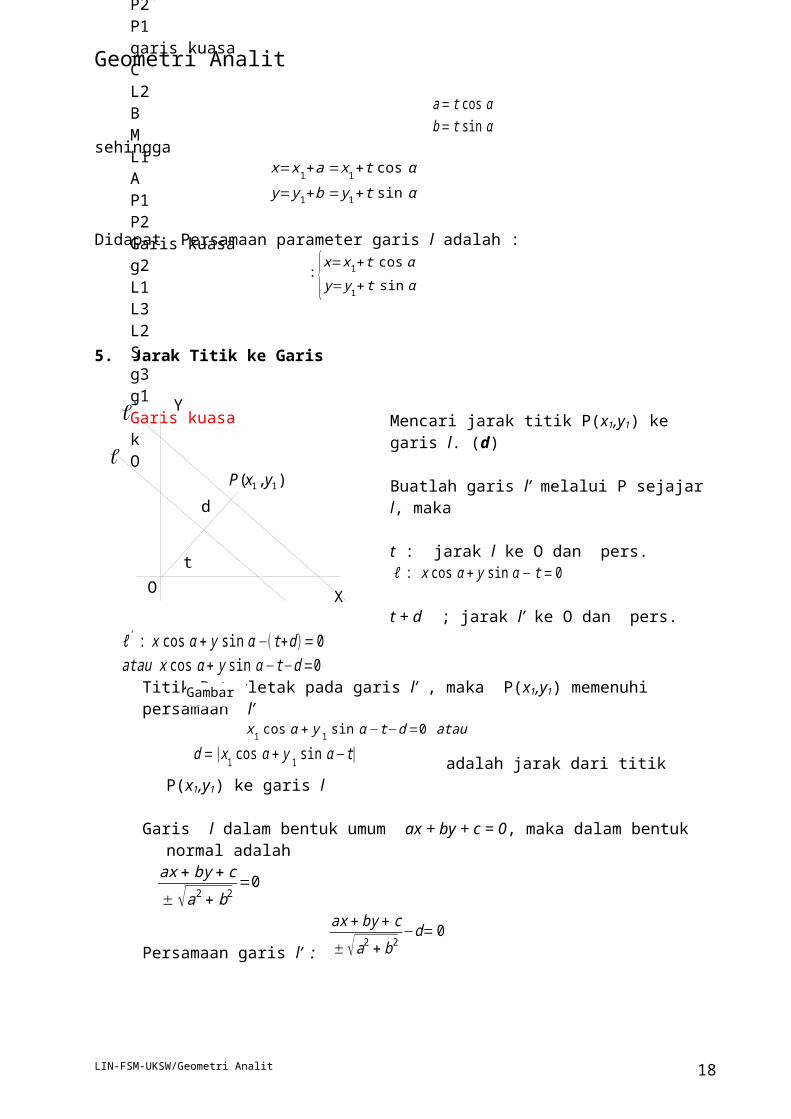
5. Jarak Titik ke Garis
Mencari jarak titik P(x1,y1) ke garis l. (d)
Buatlah garis l’ melalui P sejajar l, maka
t : jarak l ke O dan pers.ℓ : x cos α + y sin α − t= 0
t + d ; jarak l’ ke O dan pers. ℓ' : x cos α + y sin α −(t+d) = 0atau x cos α + y sin α−t−d=0
Titik P terletak pada garis l’ , maka P(x1,y1) memenuhi persamaan l’
x1 cos α + y 1 sin α−t−d=0 atau d = |x1 cos α + y 1 sin α−t| adalah jarak dari titik
P(x1,y1) ke garis l
Garis l dalam bentuk umum ax + by + c = 0, maka dalam bentuk normal adalahax + by + c± √a2 + b2
=0
Persamaan garis l’ :
ax + by + c± √a2 + b2
−d= 0
LIN-FSM-UKSW/Geometri Analit
Gambar 12
18
L2L1
O
P
X
Y
Geometri Analit
P(x1,y1 ) pada l', makaax1 + by1 + c
± √a2 + b2−d= 0 , sehingga
d=|ax1 + by1 + c
± √a2 + b2|
Contoh :2x+5y−6=0 → P(−1,2)
d=|2 . (−1) + 5 .2−6±√4+25
|=|2±√29
|=2√29
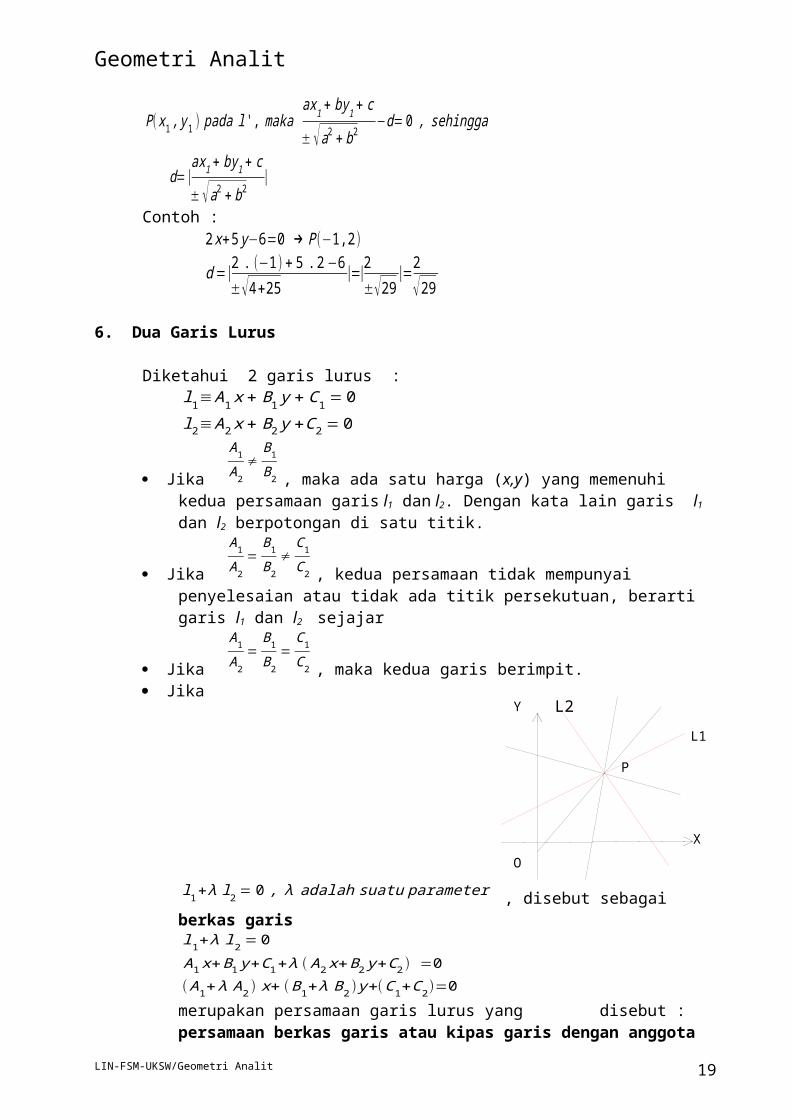
6. Dua Garis Lurus
Diketahui 2 garis lurus : l1≡A1x + B1y + C1= 0l2≡A2x + B2y +C2= 0
Jika
A1A2
≠B1B2 , maka ada satu harga (x,y) yang memenuhi
kedua persamaan garis l1 dan l2. Dengan kata lain garis l1 dan l2 berpotongan di satu titik.
Jika
A1A2
=B1B2
≠C1C2 , kedua persamaan tidak mempunyai
penyelesaian atau tidak ada titik persekutuan, berarti garis l1 dan l2 sejajar
Jika
A1A2
=B1B2
=C1C2 , maka kedua garis berimpit.
Jika
l1+λ l2 = 0 , λ adalah suatu parameter , disebut sebagai berkas garis l1+λ l2= 0A1x+B1y+C1+λ (A2x+B2y+C2) =0(A1+λ A2 ) x+ (B1+λ B2)y+(C1+C2)=0merupakan persamaan garis lurus yang disebut : persamaan berkas garis atau kipas garis dengan anggota
LIN-FSM-UKSW/Geometri Analit 19

Geometri Analit
utama l1 & l2 dan semua anggota berkas melalui titik potong P
LIN-FSM-UKSW/Geometri Analit 20
Y
P(x,y)
XO
Ry
x
(a,b)
O X
YP(x,y)
Geometri Analit
III. LINGKARAN
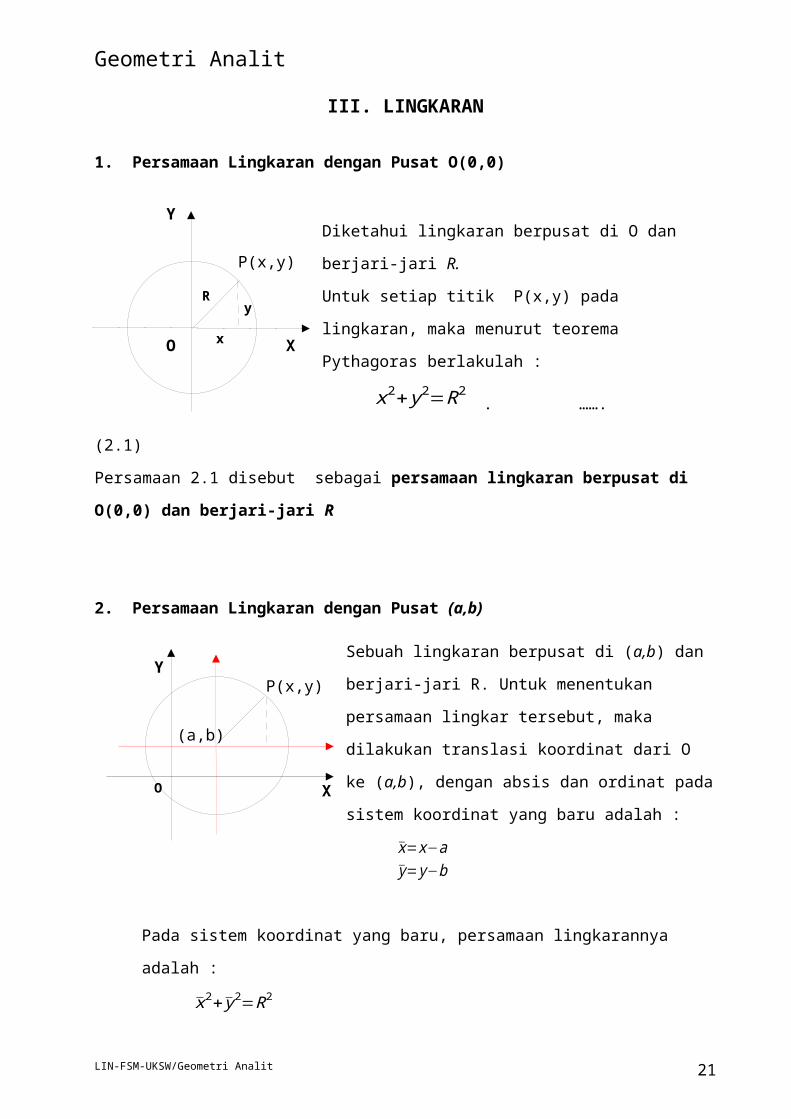
1. Persamaan Lingkaran dengan Pusat O(0,0)
Diketahui lingkaran berpusat di O dan
berjari-jari R.
Untuk setiap titik P(x,y) pada
lingkaran, maka menurut teorema
Pythagoras berlakulah :
x2+y2=R2 . …….
(2.1)
Persamaan 2.1 disebut sebagai persamaan lingkaran berpusat di
O(0,0) dan berjari-jari R
2. Persamaan Lingkaran dengan Pusat (a,b)
Sebuah lingkaran berpusat di (a,b) dan
berjari-jari R. Untuk menentukan
persamaan lingkar tersebut, maka
dilakukan translasi koordinat dari O
ke (a,b), dengan absis dan ordinat pada
sistem koordinat yang baru adalah :
x=x−ay=y−b
Pada sistem koordinat yang baru, persamaan lingkarannya
adalah :
x2+y2=R2
LIN-FSM-UKSW/Geometri Analit 21

y
M(a,b) p
O x
P(x,y)
qR
Geometri Analit
Persamaan lingkaran tersebut pada sistem XOY menjadi :
(x−a)2+(y−b)2=R2 ……. (2.2)
Jadi persamaan 2.2 merupakan persamaan lingkaran yang
berpusat di (a,b) dann berjari-jari R.
3. Bentuk Umum Persamaan Lingkaran :
x2+y2+Ax+By+C=0 ………. (1)
(x−a)2+(y−b)2=R2x2−2ax+a2+y2−2by+b2−R2=0x2+y2−2ax−2by+a2+b2−R2=0
……. (2) Dari (1) dan (2) maka :
A= -2a atau a = -½A ; B = -2b atau b = -½B
C= a2+ b2- R2 atau R=√14A2+14B2−Csehingga x2+y2+Ax+By+C=0 , adalah persamaan Lingkaran dengan
Pusat (-½A, -½B) dan berjari-jariR=√14A2+14B2−C
Contoh : Persamaan lingkaran :3x2+3y2−18x+36y+6=0x2+ y2−6x+12y+2=0
Jadi lingkaran ini berpusat di P(3,-6) dan berjari-jariR=√9+36−2=√43
4. Persamaan Lingkaran Bentuk Parameter
Untuk setiap P(x,y) pada lingkaran yangberjari-jari R dan berpusat di M(a,b), berlakulah :
p=R cos αq=R sin α
Dimana α dihitung dari arah sumbu-x positif mengelilingi M sampai 3600 : x = a + p dan y = b + q
LIN-FSM-UKSW/Geometri Analit 22
Geometri Analit
maka :
x=a+R cos αy=b+R sin α
adalah persamaan parameter lingkaran dengan α sebagai parameter
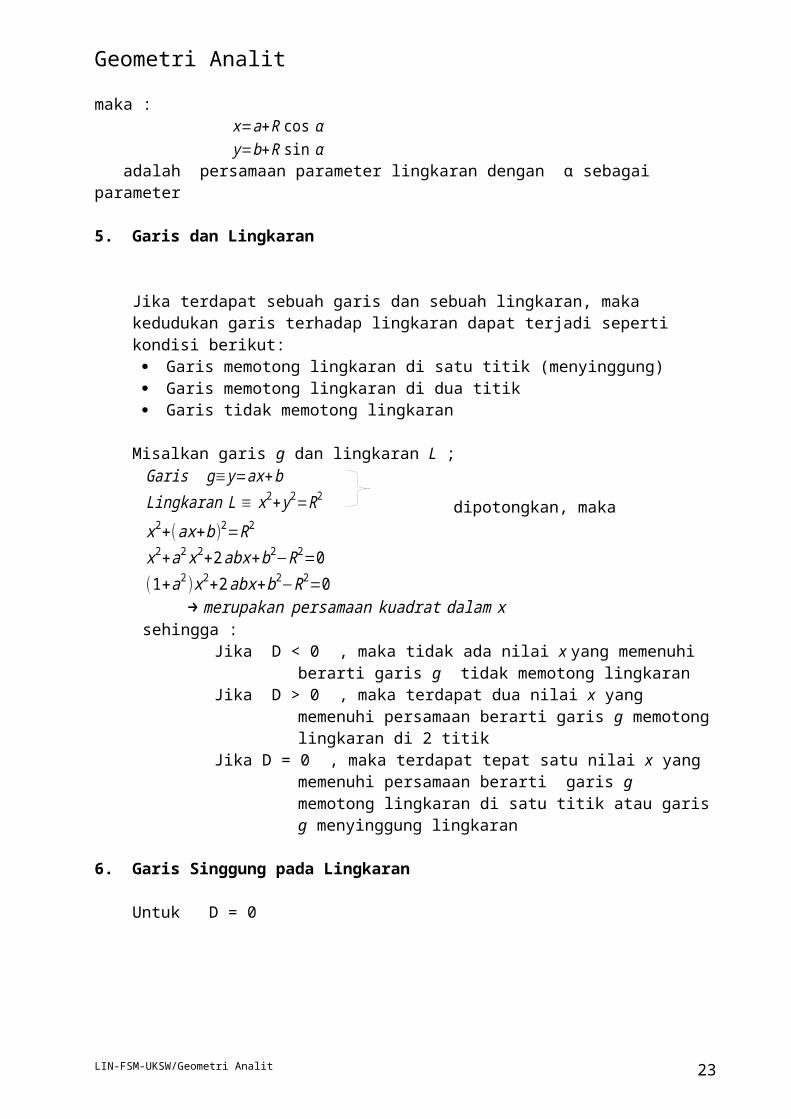
5. Garis dan Lingkaran
Jika terdapat sebuah garis dan sebuah lingkaran, maka kedudukan garis terhadap lingkaran dapat terjadi seperti kondisi berikut: Garis memotong lingkaran di satu titik (menyinggung) Garis memotong lingkaran di dua titik Garis tidak memotong lingkaran
Misalkan garis g dan lingkaran L ;Garis g≡y=ax+bLingkaran L ≡ x2+y2=R2 dipotongkan, makax2+(ax+b)2=R2x2+a2x2+2abx+b2−R2=0(1+a2)x2+2abx+b2−R2=0
→ merupakan persamaan kuadrat dalam xsehingga :
Jika D < 0 , maka tidak ada nilai x yang memenuhi berarti garis g tidak memotong lingkaran
Jika D > 0 , maka terdapat dua nilai x yang memenuhi persamaan berarti garis g memotonglingkaran di 2 titik
Jika D = 0 , maka terdapat tepat satu nilai x yang memenuhi persamaan berarti garis g memotong lingkaran di satu titik atau garisg menyinggung lingkaran
6. Garis Singgung pada Lingkaran
Untuk D = 0
LIN-FSM-UKSW/Geometri Analit 23

y=ax±R√1+a2
y
P(x1,y1)
O x
Geometri Analit
4a2b2−4 (1+a2) (b2−R2)=0a2b2−b2+R2−a2 b2+a2R2=0−b2+(1+a2) R2=0b2=(1+a2 ) R2
b =±√(1+a2 ) R2
y=ax+by=ax±R√1+a2
Persamaangaris singgung yang berkoefisien arah a pada lingkaran berpusat di O dan berjari-jari R.
Persamaan garis singgung lingkaran di P(x1,y1 )
Diketahui lingkaran x2+y2=R2 dan titik P(x1,y1)
mop=y1x1
mℓ x mop=−1
mℓ xy1x1
=−1
mℓ =−x1y1
Jadi persamaan garis singgung ℓ melalui P(x1,y1) dan mℓ=−x1y1
y−y1=−x1y1
(x−x1)
y y1−y12=−x x1+x12
x x1+y y1 =y12+x1
2
P(x1,y1 ) pada lingkaran ⇒ y12+x1
2=R2
LIN-FSM-UKSW/Geometri Analit 24

),( 33 yxR
),( 22 yxQ
), 11 yx
k
Garis kutub/polarg
Geometri Analitx x1+y y1=R
2 adalah persamaan garis singgung pada
lingkaran berpusat di O berjari-jari R dan melalui P(x1,y1 )
Contoh :
Persamaan garis singgung yang melalui (2,-3) pada x2 + y2 = 9, adalah :
x(2) + y(-3) = 9 2x – 3y – 9 = 0
Soal-soal :
1) Tentukan persamaan lingkaran yang melalui (1,3); (6,-2) dan (-3,-5). Tentukan pusat dan jari-jarinya.
2) Tentukan persamaan lingkaran yang memotong sumbu x+ suatu segmen garis sepanjang 6 dan sumbu y+ suatu segmen garis sepanjang 8 dan juga melalui titik O.
3) Tentukan persamaan lingkaran yang melalui titik pangkal berjari-jari √5 dan pusatnya pada garis x – y = 1.
4) Tentukan persamaan garis singgung pada lingkaran x2+y2=25dititik (-4,3) juga persamaan garis singgung yang // garis singgung tadi.
7. Garis Kutub/Polar
Diketahui lingkaran yang berpusat di O dan berjari-jari R :x2+y2=R2 , titik Q dan R terletak pada lingkaran, titik P berada di luar lingkaran, maka
Persamaan garis singgung PQ≡x x2+y y2=R2
Persamaan garis singgung PR≡x x3+y y3=R2
P(x1,y1) terletak pada PQ, makax1x2+y1y2=R
2 …… (1)
P(x1,y1) terletak pada PR , makax1x3+y1y3=R
2 …… (2)
LIN-FSM-UKSW/Geometri Analit 25
(a,b)A
B
Q
B’
A’
),( 11 yxP
222 )()( Rbyax
R
Geometri Analit
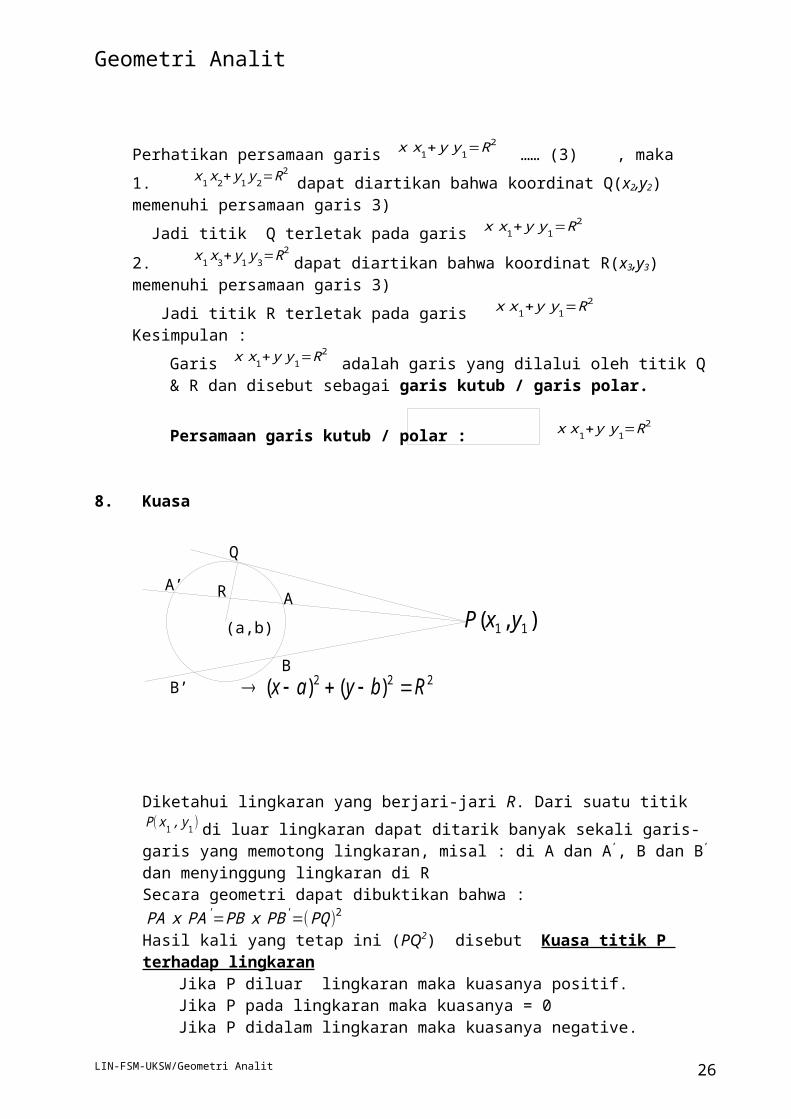
Perhatikan persamaan garis x x1+y y1=R
2 …… (3) , maka
1. x1x2+y1y2=R2dapat diartikan bahwa koordinat Q(x2,y2)
memenuhi persamaan garis 3)Jadi titik Q terletak pada garis x x1+y y1=R
2
2. x1x3+y1y3=R2dapat diartikan bahwa koordinat R(x3,y3)
memenuhi persamaan garis 3) Jadi titik R terletak pada garis x x1+y y1=R
2
Kesimpulan :Garis x x1+y y1=R
2 adalah garis yang dilalui oleh titik Q
& R dan disebut sebagai garis kutub / garis polar.
Persamaan garis kutub / polar : x x1+y y1=R2
8. Kuasa
Diketahui lingkaran yang berjari-jari R. Dari suatu titikP(x1,y1) di luar lingkaran dapat ditarik banyak sekali garis-garis yang memotong lingkaran, misal : di A dan A’, B dan B’
dan menyinggung lingkaran di RSecara geometri dapat dibuktikan bahwa : PA x PA'=PB x PB'=(PQ )2Hasil kali yang tetap ini (PQ2) disebut Kuasa titik P terhadap lingkaran
Jika P diluar lingkaran maka kuasanya positif.Jika P pada lingkaran maka kuasanya = 0Jika P didalam lingkaran maka kuasanya negative.
LIN-FSM-UKSW/Geometri Analit 26

Geometri Analit
Bila lingkaran berpusat di M(a,b) L≡ (x−a)2+(y−b)2=R2 danP(x1,y1) di luar lingkaran, maka kuasanya P terhadap lingkaranL adalah
PR2=PM2−R 2
PR2=(x1−a)2+(y1−b)
2−R2
LIN-FSM-UKSW/Geometri Analit 27
(-A,-B)
Garis sentral
L1L2
(-M,-N)
),( 11 yxP
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
Geometri Analit
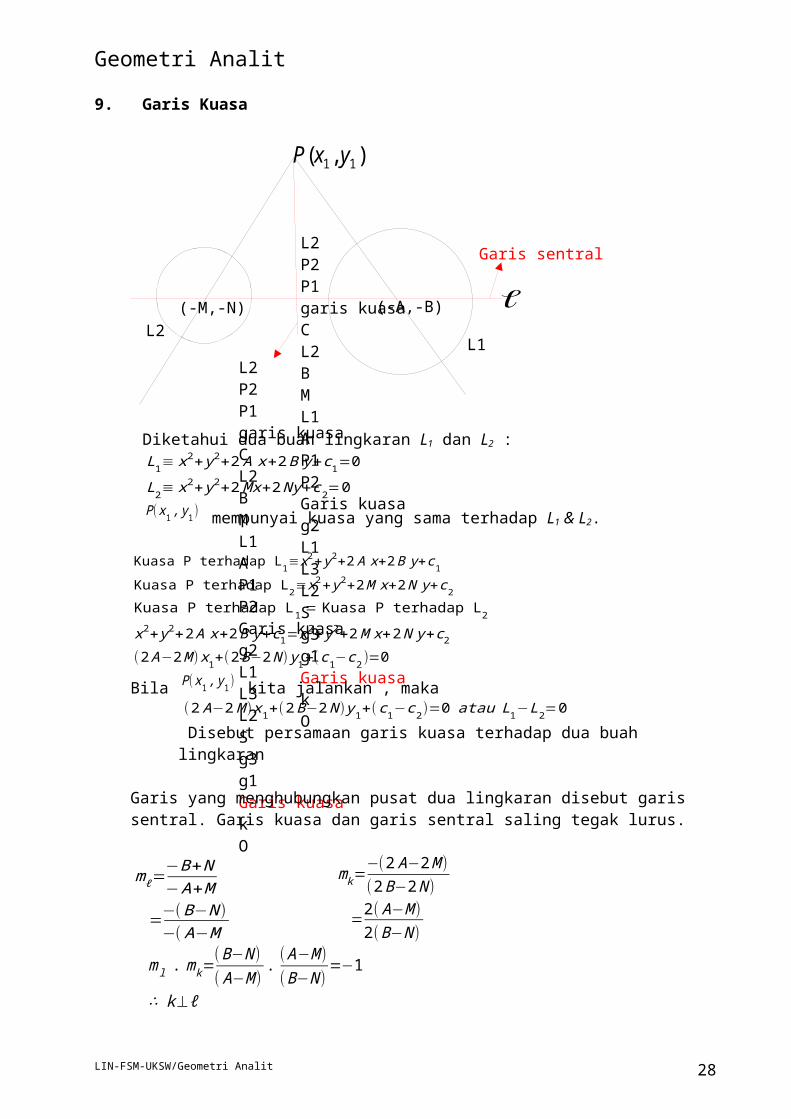
9. Garis Kuasa
Diketahui dua buah lingkaran L1 dan L2 :L1≡ x2+y2+2A x+2B y+c1=0L2≡ x2+y2+2Mx+2Ny+c2=0P(x1,y1 ) mempunyai kuasa yang sama terhadap L1 & L2.
Kuasa P terhadap L1≡x2+y2+2A x+2B y+c1
Kuasa P terhadap L2≡x2+y2+2M x+2N y+c2
Kuasa P terhadap L1 = Kuasa P terhadap L2x2+y2+2A x+2B y+c1=x
2+y2+2M x+2N y+c2(2A−2M)x1+(2B−2N)y1+(c1−c2)=0
Bila P(x1,y1) kita jalankan , maka(2A−2M)x1+(2B−2N)y1+(c1−c2)=0 atau L1−L2=0 Disebut persamaan garis kuasa terhadap dua buah lingkaran
Garis yang menghubungkan pusat dua lingkaran disebut garis sentral. Garis kuasa dan garis sentral saling tegak lurus.
mℓ=−B+N−A+M
=−(B−N)−(A−M
mk=−(2A−2M)(2B−2N)
=2(A−M)2(B−N)
ml . mk=(B−N)(A−M) .
(A−M)(B−N) =−1
∴ k⊥ℓ
LIN-FSM-UKSW/Geometri Analit 28
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L1
Geometri Analit
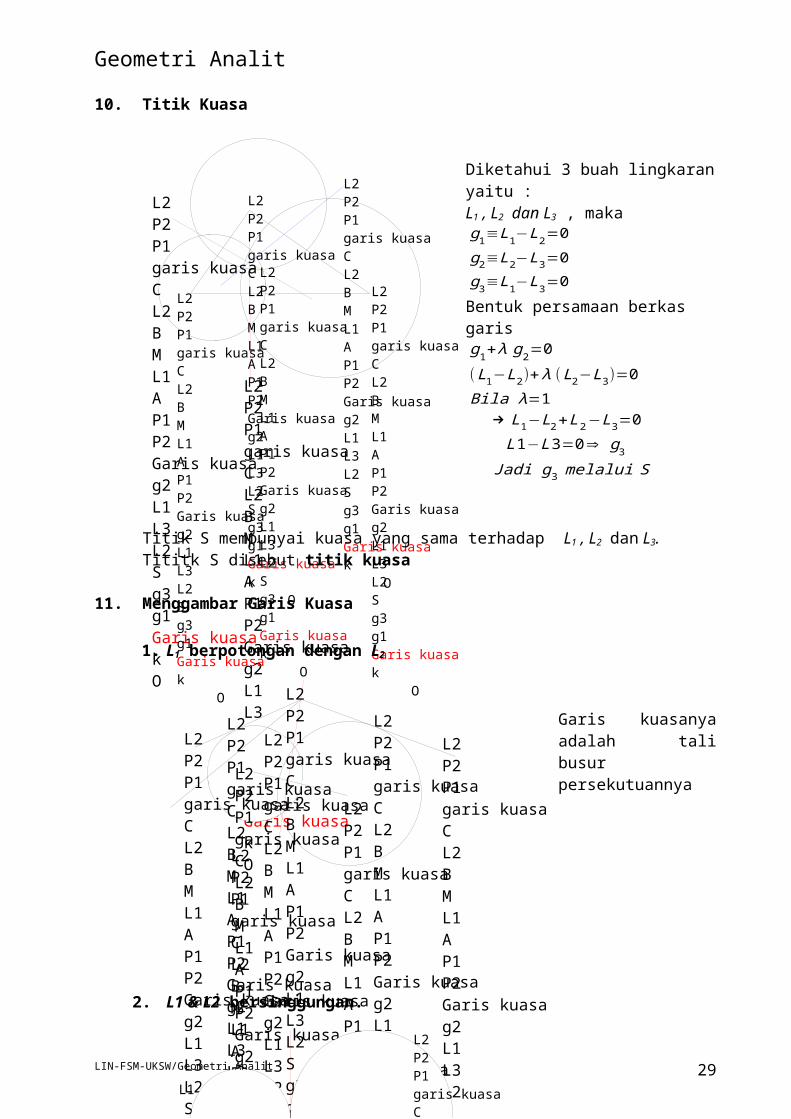
10. Titik Kuasa
Diketahui 3 buah lingkaranyaitu :L1 , L2 dan L3 , makag1≡L1−L2=0g2≡L2−L3=0g3≡L1−L3=0Bentuk persamaan berkas garis g1+λ g2=0(L1−L2)+λ (L2−L3)=0Bila λ=1
→ L1−L2+L2−L3=0L1−L3=0⇒ g3
Jadi g3 melalui S
Titik S mempunyai kuasa yang sama terhadap L1 , L2 dan L3. Tititk S disebut titik kuasa
11. Menggambar Garis Kuasa
1. L1 berpotongan dengan L2
Garis kuasanyaadalah talibusurpersekutuannya
2. L1 & L2 bersinggungan.
LIN-FSM-UKSW/Geometri Analit 29
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasakO
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
L2P2P1garis kuasaCL2BML1AP1P2Garis kuasag2L1L3L2Sg3g1Garis kuasak
O
P3L3
L2
P2P1
L1
Sg1
g2
Geometri Analit
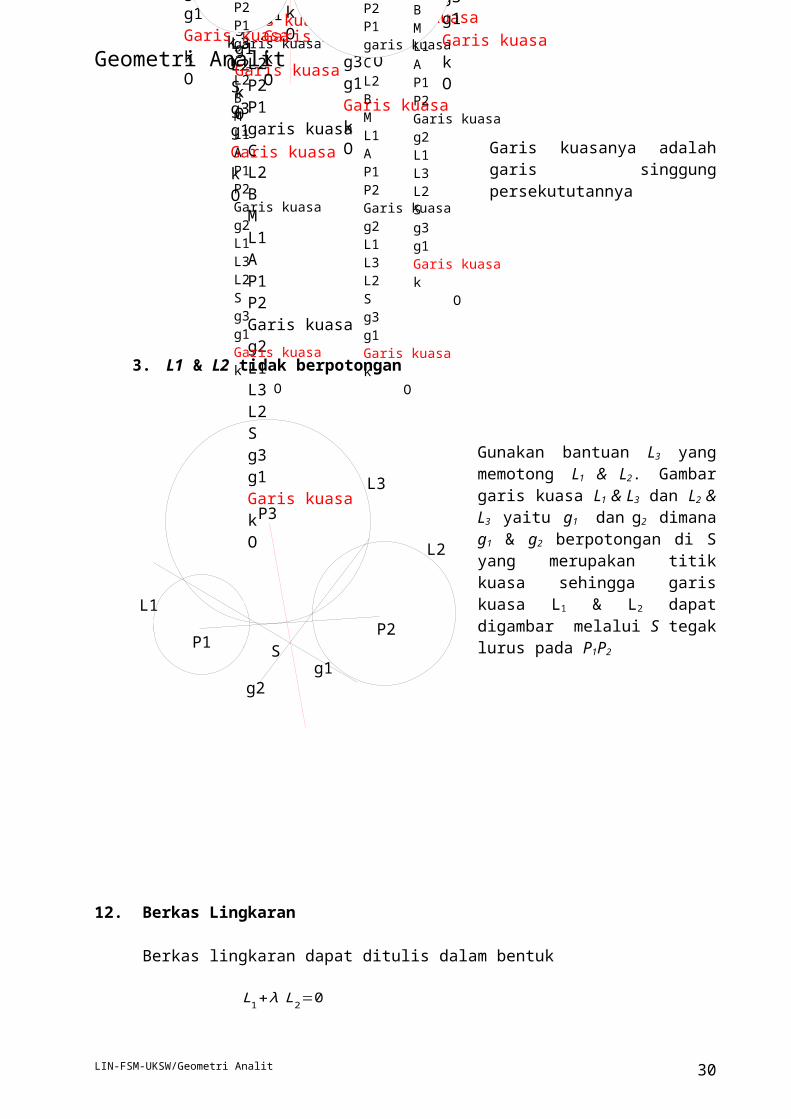
Garis kuasanya adalahgaris singgungpersekututannya
3. L1 & L2 tidak berpotongan
Gunakan bantuan L3 yangmemotong L1 & L2. Gambargaris kuasa L1 & L3 dan L2 &L3 yaitu g1 dan g2 dimanag1 & g2 berpotongan di Syang merupakan titikkuasa sehingga gariskuasa L1 & L2 dapatdigambar melalui S tegaklurus pada P1P2
12. Berkas Lingkaran
Berkas lingkaran dapat ditulis dalam bentuk
L1+λ L2=0
LIN-FSM-UKSW/Geometri Analit 30
Geometri Analit
L1 & L2 disebut lingkaran dasar, 2 titik potongnya disebuttitik-titik dasarλ adalah suatu parameter, untuk setiap harga λ terdapatsebuah lingkaran pada berkas yang disebut anggota berkas.Setiap anggota berkas lingkaran selalu melalui titik-titikdasar , sehingga berlaku :
1. Jika L1 & L2 berpotongan, maka semua anggota berkasberpotongan dititik dasarnya. Anggota berkas terkeciladalah lingkaran yang panjang garis tengahnya adalahjarak 2 titik dasar tersebut.
2. Jika L1 & L2 bersinggungan, maka titik dasarnya berimpit,yaitu titik singgung L1 & L2 . Jadi semua anggota berkaspasti juga melalui titik singgung tersebut. Anggotaberkas terkecil adalah sebuah lingkaran yang berjari-jari nol.
LIN-FSM-UKSW/Geometri Analit 31
Geometri Analit
3. Jika L1 & L2 tidak berpotongan dan tidak bersinggungan,maka titik dasarnya tidak nyata (imajiner), sehinggasemua anggota berkas juga tidak berpotongan. Dalamberkas akan terdapat 2 buah lingkaran nol.
LIN-FSM-UKSW/Geometri Analit 32
Geometri Analit
IV.TEMPAT KEDUDUKAN
Dalam geometri analit tempat kedudukan mempunyai arti yangsangat penting. Metode ini sangat sistematis yang penguraiannyadisusun dari bawah ke atas, menuju ke penyelesaianmasalah.Permasalahan menentukan tempat kedudukan dapat dibagimenjadi 3 golongan :
1. Menjalankan Koordinato Ambil sembarang titik (x0,y0) , misalkan titik tersebut
pada kedudukan. o Diskripsikan syarat-syarat yang harus dipenuhi agar
titik berada pada tempat kedudukan.o Berdasarkan syarat yang ditentukan carilah hubungan
antara x0 dan y0. o Jalankan titik (x0,y0) yang memenuhi hubungan yang
diperoleh pada langkah sebelumnya, dengan menghilangkanpenunjuknya (angka 0 pada x0) . Ini berarti bahwa setiaptitik yang memenuhi hubungan tersebut berada pada tempatkedudukan atau tempat kedudukan yang dicari sudahdiperoleh.
Contoh :
1) Tentukan tempat kedudukan titik-titik yang berjarak samaterhadap titik P(1,3) & Q(2,1)Misalkan titik R(x0,y0) terletak pada tempat kedudukan yangdicari, maka harus dipenuhi syarat bahwa PR= QRBerdasarkan syarat tsb. Dicari hubungan antara x0 dan y0,
sbb :√(1−x0)2+(3−y0 )2=√(2−x0 )2+(1−y0 )21−2x0+x0
2+9−6y0+y02=4−4x0+x0
2+1−2y0+y02
10−2x0−6y0=5−4x0−2y02x0−4y0+5=0 (x0,y0) dijalankan , akan diperoleh 2x – 4y + 5=0 (adalahtempat kedudukan yang dicari)
2) Diketahui titik P(-3,4) dan Q(3,-2). Tentukan tempatkedudukan titik yang jaraknya terhadap P dan terhadap Qberbanding 2 : 1.
LIN-FSM-UKSW/Geometri Analit 33
Geometri Analit
Misal : R(x0,y0) sembarang titik pada tempatkedudukan yang dicari.Syarat : PR : RQ = 2 : 1 atau PR = 2RQ
√(−3−x0 )2+(4−y0)2=2 √(3−x0 )2+(−2−y0 )29−6x0+x0
2+16−8y0+y02=4(9−6x0+x0
2+4+4y0+y02 )
3y02+3x0
2−30 x0−24y0+27=0x02+y0
2−10 x0−8y0+9=0
(x0,y0) dijalankan, maka x2+y2−10 x−8y+9=0 adalahtempat kedudukan yang dicari, berbentuk lingkaran denganpusat (5,4) dan berjari-jari : √25+16−9=√32=4√2
2. Menggunakan Parametero Tentukan sebuah atau lebih parametero Diskripsikan syarat-syarat yang harus dipenuhi agar
titik berada pada tempat kedudukan.o Berdasarkan syarat yang ditentukan carilah hubungan
antara x , y dan parameter o Eliminasilah parameter tsb, diperlukan 2 persamaan jika
ada 1 parameter atau diperlukan 3 persamaan jika ada 2parameter, dst.
o Didapatkan tempat kedudukan yang dicari.
Contoh :
Tentukanlah tempat kedudukan titik-titik sudut P sehinggasudut APB = 90∘ . Titik A & B diketahui.Penyelesaiaan :Dalam soal diatas koordinat A & B tidak diketahui. Olehkarenannya sangat praktis jika AB diambil sebagai sumbu-xdan sumbu AB adalah sumbu-y. Misal : AB = 2a, jadi A(-a, 0) & B(a, 0)(1). Persamaan garis AP≡y=m(x+a) , m sebagai parameter
(2) Persamaaan garis BP≡y=−
1m(x−a) ,karena BP⊥AP
Parameter m dieliminasi :
LIN-FSM-UKSW/Geometri Analit 34
Geometri Analit
(1) m=yx+a
(2) m=−(x−a)y
yx+a =−
(x−a)y
y2=−(x−a) (x+a)y2=−x2+a2x2+y2=a2
Jadi x2+y2=a2 adalah tempat kedudukan yang dicari, yaituberbentuk lingkaran dengan pusat (0,0) dan berjari-jari 4satuan.
3. Kombinasi 1 dan 2
Contoh : 1. Diketahui sebuah lingkaran x2+y2=a2 dan garis y = ax.
Tentukan tempat kedudukan tengah-tengah tali busur yangmemotong lingkaran tersebut dan sejajar dengan y = axMisal : persamaan garis yang sejajar y = ax adalahy=ax+n ( n = parameter ) Garis ini memotong x2+y2=a2 (talibusur) , sehingga
x2+(ax+n)2=a2
x2+a2x2+2anx+n2−a2=0(1+a2 )x2+2anx+(n2−a2 )=0 .......∗)
Misal : T(x0,y0 ) adalah titik tengah y=ax+nAbsis T adalah akar-akar dari persamaan *)dimana :
x0=−12 (2an1+a2 )=−an1+a2
y0=−a . 12 (2an1+a2 )+n=−a
2n1+a2
+n
n=x0 (1+a
2 )−a
............ (1)
y0=−a2n+n (1+a2 )1+a2
=n (−a2+1+a2 )1+a2
=n1+a2
n=yo (1+a2) ............. (2)
Dari (1) dan (2)
x0=−a y0 (1+a2)(1+a2)
y0 (1+a2)=
x0 (1+a2)−a
−a y0=x0y0=−
1ax0
LIN-FSM-UKSW/Geometri Analit 35
Geometri Analit
(x0,y0) dijalankan, maka tempat kedudukan yang dicari
adalah, y=−1
ax, berbentuk garis lurus yang melalui (0,0)
& ¿ y=ax
2. Diketahui lingkaran x2+y2=r2 dan titik P(a,b). Tentukantempat kedudukan tengah-tengah semua tali busur lingkaranyang melalui P.Misalkan persamaan garis yang melalui P(a,b) :y−a=m(x−a)Garis tersebur memotong lingkaran x2+y2=r2 (sebagaitalibusur), maka didapat
x2+(m(x−a)+b)2−r2=0x2+m2(x2−2ax+a2)+2mb(x−a)+b2−r2=0x2+m2x2−2am2x+a2m2+2mbx−2mba+b2−r2=0(1+m)x2−2(am2−mb)x+(a2m2+b2−2abm−r2)=0 ......... (∗)
Misal T(x0,y0 ) tengah-tengah tali busurAbsis T adalah akar-akar persamaan (*)
x0=12 .
2(am2−mb )1+m2
=(am2−mb )1+m2
=−m(b−am )
1+m2 ……. (1)
y0=m (am2−mb1+m2
−a)+b = m(am2−mb−a−am2)
1+m2+b
= m (−mb−a1+m2 )+b =−m2b−am+b+bm2
1+m2
y0=b−am1+m2
....... (2)
Dari (1) dan (2), diperoleh
x0=−m y0 , jadi m=−x0y0
…….. (3)Substitusikan (3) ke (2) :
LIN-FSM-UKSW/Geometri Analit 36
Geometri Analit
y0=b +a(
x0y0
)
1+ (x0
y0)2 =
by0 +ax0y0
y02+x0
2
y02
=y0 (b y0+a x0)x02+y02
⇔ 1=a x0+b y0x02+y0
2
x02+y0
2=a x0+b y0x02+y0
2−a x0−b y0=0
T(x0,y0 ) dijalankan, maka tempat kedudukan yang dicariadalah, merupakan sebuah lingkaran dengan pusat P( 12a, 1
2 b)
dan jari-jari r=√ 14 a
2+ 14b
2 = 12 √a2+b2
LIN-FSM-UKSW/Geometri Analit 37
g
Geometri Analit
V. PARABOLA
Definisi : Parabola adalah tempat kedudukan titik-titik yangberjarak sama terhadap sebuah titik dan sebuah garistertentu. Titik tertentu itu disebut fokusGaris tertentu itu disebut garis direktriks
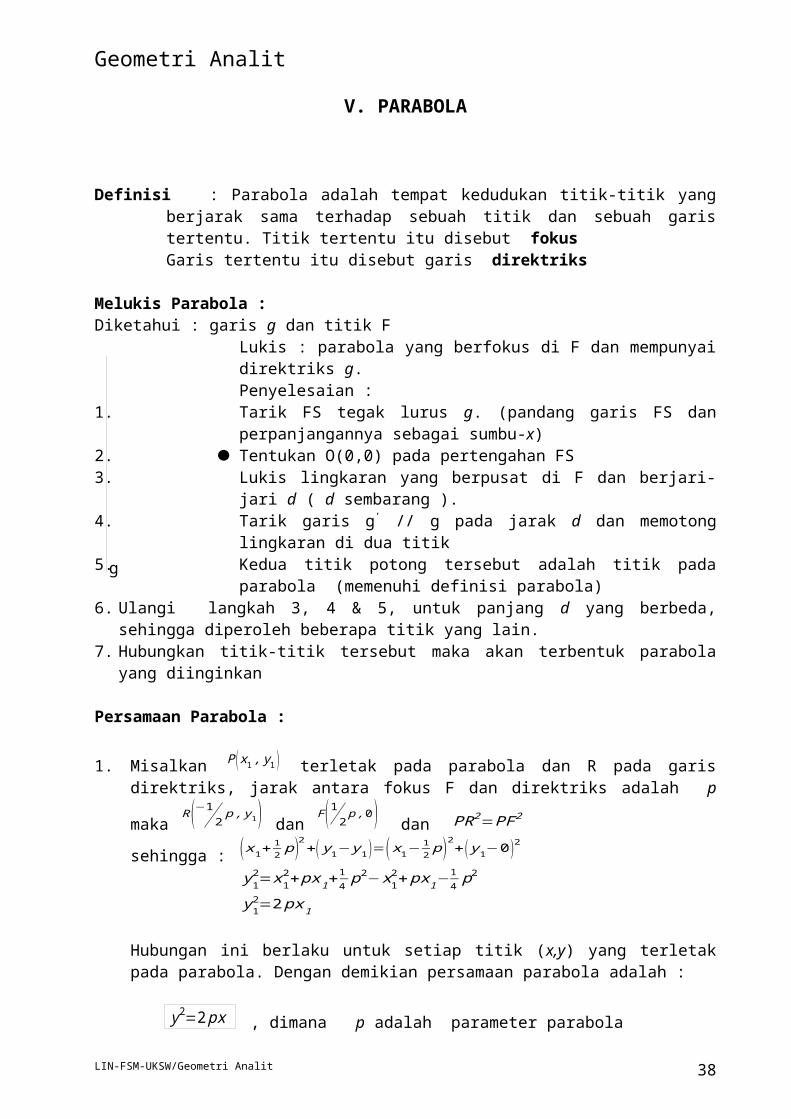
Melukis Parabola :Diketahui : garis g dan titik F
Lukis : parabola yang berfokus di F dan mempunyaidirektriks g.Penyelesaian :
1. Tarik FS tegak lurus g. (pandang garis FS danperpanjangannya sebagai sumbu-x)
2. Tentukan O(0,0) pada pertengahan FS3. Lukis lingkaran yang berpusat di F dan berjari-
jari d ( d sembarang ).4. Tarik garis g’ // g pada jarak d dan memotong
lingkaran di dua titik 5. Kedua titik potong tersebut adalah titik pada
parabola (memenuhi definisi parabola)6. Ulangi langkah 3, 4 & 5, untuk panjang d yang berbeda,
sehingga diperoleh beberapa titik yang lain.7. Hubungkan titik-titik tersebut maka akan terbentuk parabola
yang diinginkan
Persamaan Parabola :
1. Misalkan P (x1,y1 ) terletak pada parabola dan R pada garisdirektriks, jarak antara fokus F dan direktriks adalah p
maka R(−12p,y1) dan F(12p,0) dan PR2=PF2sehingga : (x1+ 1
2 p)2+(y1−y1)=(x1− 1
2p)2+(y1−0)
2
y12=x1
2+px1+14 p
2−x12+px1−
14 p
2
y12=2px1
Hubungan ini berlaku untuk setiap titik (x,y) yang terletakpada parabola. Dengan demikian persamaan parabola adalah :
y2=2px , dimana p adalah parameter parabola
LIN-FSM-UKSW/Geometri Analit 38
Geometri Analit
Parabola ini mempunyai : - puncak : O(0,0) - sumbu simetri : sumbu-x (y =0)- fokus : F ( 12 p,0) - direktriks : x=−
12p
LIN-FSM-UKSW/Geometri Analit 39
Geometri Analit
2. Dengan translasi sumbu koordinat dapat diperoleh persamaanparabola yang berpuncak di (a,b) adalah :
(y−b)2=2p(x−a) , dimana p adalah parameterparabola
Parabola yang mempunyai : - puncak : P(a,b) - sumbu simetri : y = b- focus : F (a+ 1
2p,b) - direktriks : x=a−12 p
Bukti :
T : O(0,0) P(a,b)Maka : x'=x−a dan y'=y−b
pada X'0'Y' : pada X0Y :
persamaan : y' 2=2px' (y−a)2=2p(x−a)puncak : O’ (0,0) P (a,b)focus : F’ ( 12 p,0) F (a+ 1
2p,b)
direktriks : x'=− 1
2 p
(x−a)=− 12p atau x=a−1
2 p
3. Bentuk parameter :x=2pt2y=2pt
Bukti : y=2pt → t=y /2px=2p(y /2p)2 → x=2y2/4p → y2=2px
Contoh : 1. Tentukan persamaan parabola yang berpuncak di O(0,0),
mempunyai sumbu simetri sumbu-x dan melalui titik T(1,2).Penyelesaian : Misalkan persamaan parabola y2=2px . T(1,2) terletak padaparabola, maka terpenuhi 4 = 2.p.1 atau p = 2Jadi persamaan parabolanya : y2=4x
2. Tentukan puncak, fokus, sumbu simetri dan direktriks dariparabola y2−4x−4y+16=0
LIN-FSM-UKSW/Geometri Analit 40
Geometri Analit
Penyelesaian : y2−4x−4y+16=0 (y−.......)2=.....(x−......)
Puncak :Sumbu simetri :Direktriks :
LIN-FSM-UKSW/Geometri Analit 41

O
T(x1,y1)
xg
Geometri Analit
Garis Singgung Parabola
Persamaan parabola : y2 = 2px …. (1) Garis g : y = mx + n …. (2)
Garis g dipotongkan pada parabola :(mx+n)2=2pxm2x2+2mnx+n2−2px=0m2x2+2(mn−p)x+n2=0
D=4(mn−p)2−4m2n2=4p2−8mnp
D < 0 , maka garis g tidak memotong parabola D > 0 , maka garis g memotong parabola d 2 titik D = 0 , maka garis g menyinggung parabola
D = 0 4p2−8 mnp=0p−2mn=0 , n=p /2m
y=mx+p /2m adalah persamaan garis singgung yangbergradien m pada parabola y2 = 2px
Bila persamaan parabolanya adalah (y−b)2=2p(x−a), maka persamaangaris singgung yang bergradien m adalah :
(y−b)=m(x−a)+p/2m
Persamaan garis singgung parabola di T(x1,y1)
Garis g menyinggung parabolay2=2px di titik T(x1,y1).
Persamaan garis g :
LIN-FSM-UKSW/Geometri Analit 42

Geometri Analit
(y – y1) = m(x – x1)y = m(x – x1) + y1
Garis g dipotongkan pada parabola :
(m(x−x1)+y1)2=2px
m2(x2−2x1x+x12)+2my1 (x−x1 )+y1
2−2px=0m2x2−(2m2x1−2my1+2p)x+m
2x12+2mx1y1+y1
2=0
2x1=2m2x1−2my1+2pm2
x+m2x1
2+2mx1y1+y12
m2=0
2x1=2m2x1−2my1+2pm2
m2x1=m2x1−my1+p
m y1 =pm =p /y1
INGAT : ax2+bx+c=0x2+b /a x+c /a=0akar−akar PK : x1 ∧ y1x1+x2=−b /a
D=0 → x1=x2, jadi 2x1=−b /a
Garis g : (y−y1)=p/y1 (x−x1 )
y1y−y12=px−px1 , T(x1,y1) terletak pada parabola
maka y12=2px1
sehingga y1y - 2px1 = px – px1
y1y = px - px1
y1y=p (x+x1 ) adalah persamaan garis singgung
parabola di T(x1,y1)
Bila persamaan parabola (y−b)2=2p(x−a) , maka persamaan garissinggung parabola di T(x1,y1) adalah
(y1−b) (y−b)=p (x+x1−2a)
LIN-FSM-UKSW/Geometri Analit 43

Geometri Analit
Contoh :
Tentukan persamaan garis singgung di titik A(2 , 9) padaparabola y2 = 36xPenyelesaian :
LIN-FSM-UKSW/Geometri Analit 44
O
A(x2,y2)
x
g1
g2
B(x3,y3)
P(x1,y1)
y
O xR
y
F S Q
T P
Geometri Analit
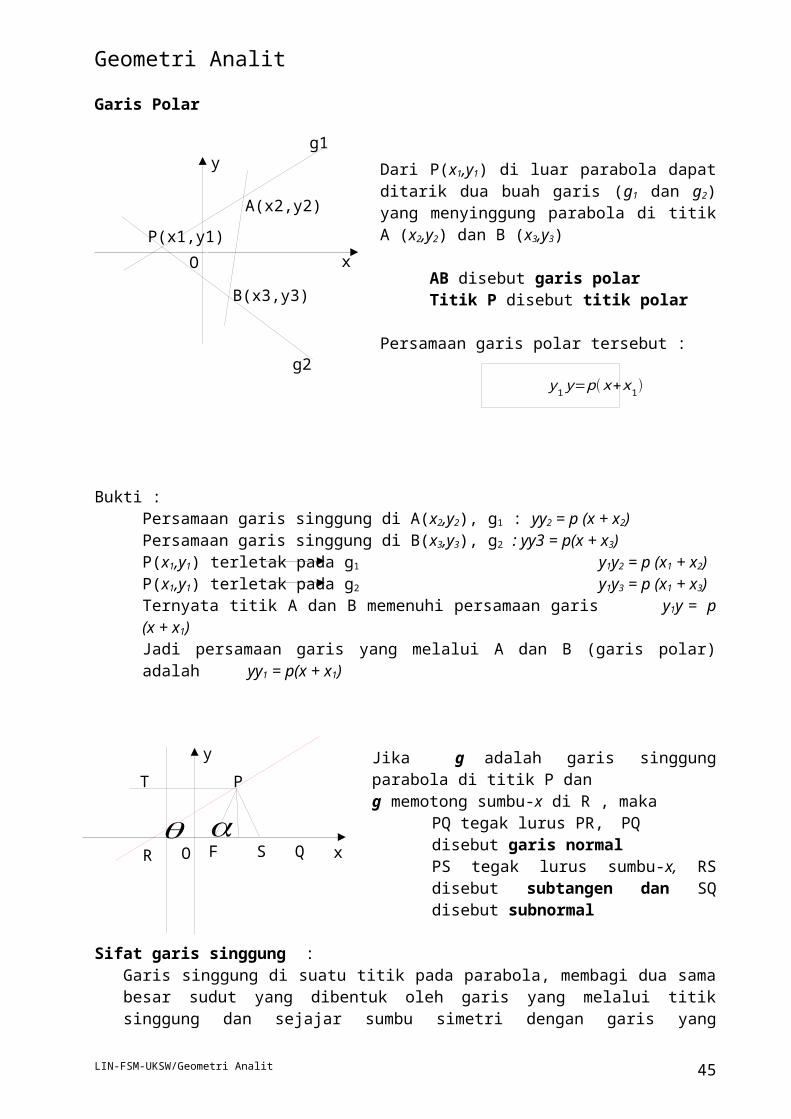
Garis Polar
Dari P(x1,y1) di luar parabola dapatditarik dua buah garis (g1 dan g2)yang menyinggung parabola di titikA (x2,y2) dan B (x3,y3)
AB disebut garis polar Titik P disebut titik polar
Persamaan garis polar tersebut :
y1y=p(x+x1)
Bukti : Persamaan garis singgung di A(x2,y2), g1 : yy2 = p (x + x2)Persamaan garis singgung di B(x3,y3), g2 : yy3 = p(x + x3)P(x1,y1) terletak pada g1 y1y2 = p (x1 + x2)P(x1,y1) terletak pada g2 y1y3 = p (x1 + x3)Ternyata titik A dan B memenuhi persamaan garis y1y = p(x + x1) Jadi persamaan garis yang melalui A dan B (garis polar)adalah yy1 = p(x + x1)
Jika g adalah garis singgungparabola di titik P dang memotong sumbu-x di R , maka
PQ tegak lurus PR, PQdisebut garis normalPS tegak lurus sumbu-x, RSdisebut subtangen dan SQdisebut subnormal
Sifat garis singgung :Garis singgung di suatu titik pada parabola, membagi dua samabesar sudut yang dibentuk oleh garis yang melalui titiksinggung dan sejajar sumbu simetri dengan garis yang
LIN-FSM-UKSW/Geometri Analit 45
Geometri Analit
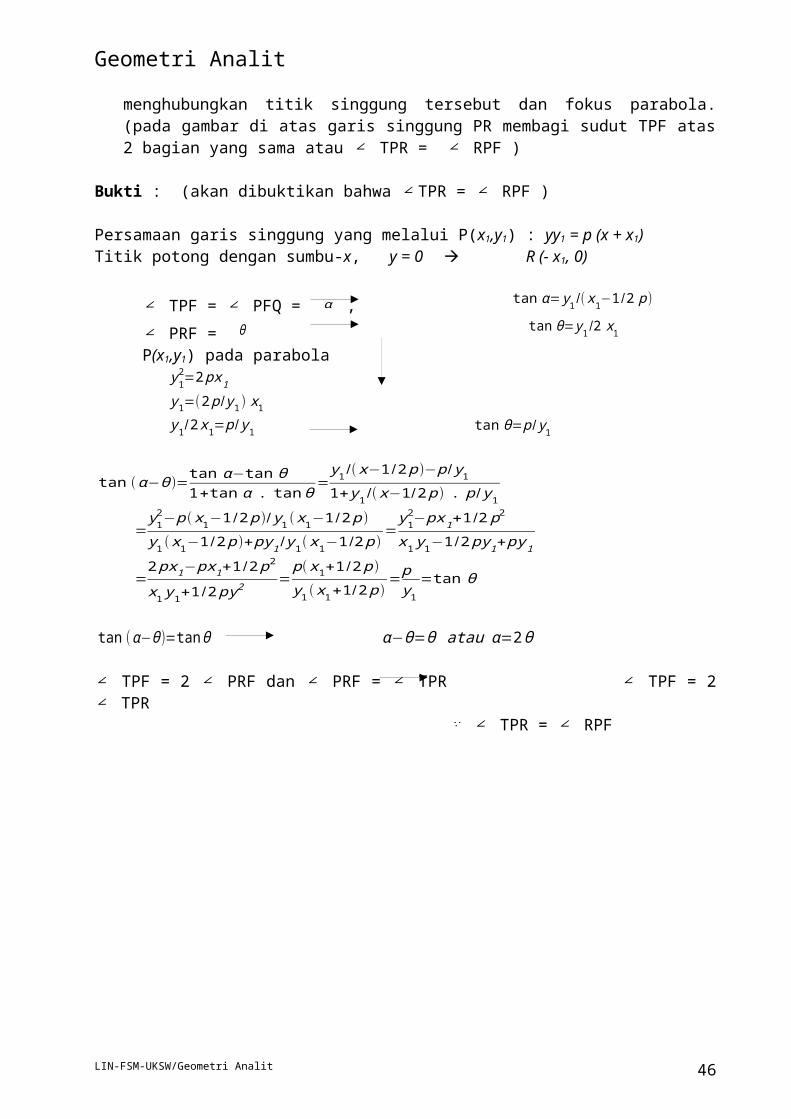
menghubungkan titik singgung tersebut dan fokus parabola.(pada gambar di atas garis singgung PR membagi sudut TPF atas2 bagian yang sama atau ∠ TPR = ∠ RPF )
Bukti : (akan dibuktikan bahwa ∠ TPR = ∠ RPF )
Persamaan garis singgung yang melalui P(x1,y1) : yy1 = p (x + x1) Titik potong dengan sumbu-x, y = 0 R (- x1, 0)
∠ TPF = ∠ PFQ = α , tan α=y1 /(x1−1 /2 p)
∠ PRF = θ tan θ=y1 /2 x1P(x1,y1) pada parabola
y12=2px1
y1=(2p /y1 ) x1y1/2x1=p /y1 tan θ=p /y1
tan (α−θ)=tan α−tan θ1+tan α . tanθ=
y1 /(x−1 /2p)−p/y11+y1 /(x−1/2p) . p /y1
=y12−p(x1−1 /2p)/y1 (x1−1 /2p)y1 (x1−1 /2p)+py1 /y1(x1−1 /2p)
=y12−px1+1 /2p
2
x1y1−1 /2py1+py1
=2px1−px1+1 /2p
2
x1y1+1 /2py2 =
p(x1+1 /2p)y1 (x1+1/2p)
=py1
=tan θ
tan (α−θ)=tanθ α−θ=θ atau α=2θ
∠ TPF = 2 ∠ PRF dan ∠ PRF = ∠ TPR ∠ TPF = 2∠ TPR
∵ ∠ TPR = ∠ RPF
LIN-FSM-UKSW/Geometri Analit 46
· P(x0,y0)
O F2(c,0)F1(-c,0)
Geometri Analit
VI. ELLIPS
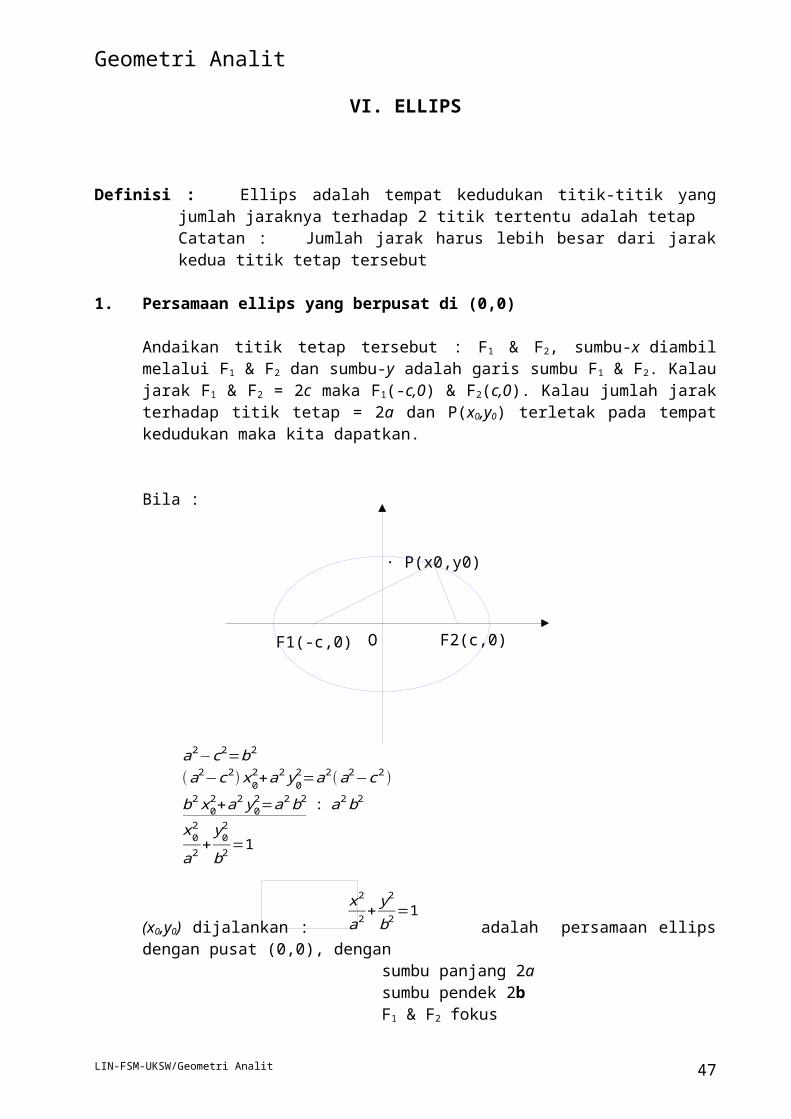
Definisi : Ellips adalah tempat kedudukan titik-titik yangjumlah jaraknya terhadap 2 titik tertentu adalah tetap Catatan : Jumlah jarak harus lebih besar dari jarakkedua titik tetap tersebut
1. Persamaan ellips yang berpusat di (0,0)
Andaikan titik tetap tersebut : F1 & F2, sumbu-x diambilmelalui F1 & F2 dan sumbu-y adalah garis sumbu F1 & F2. Kalaujarak F1 & F2 = 2c maka F1(-c,0) & F2(c,0). Kalau jumlah jarakterhadap titik tetap = 2a dan P(x0,y0) terletak pada tempatkedudukan maka kita dapatkan.
Bila :
a2−c2=b2(a2−c2)x0
2+a2y02=a2(a2−c2)
b2x02+a2y0
2=a2b2 : a2b2
x02
a2+y02
b2=1
(x0,y0) dijalankan : x2
a2+y2
b2=1
adalah persamaan ellipsdengan pusat (0,0), dengan
sumbu panjang 2a sumbu pendek 2bF1 & F2 fokus
LIN-FSM-UKSW/Geometri Analit 47
C(0,b)
OF1(-C,0) F2(C,0)
y
xA(a,0)B(-a,0)
D(0,-b)
Geometri Analit
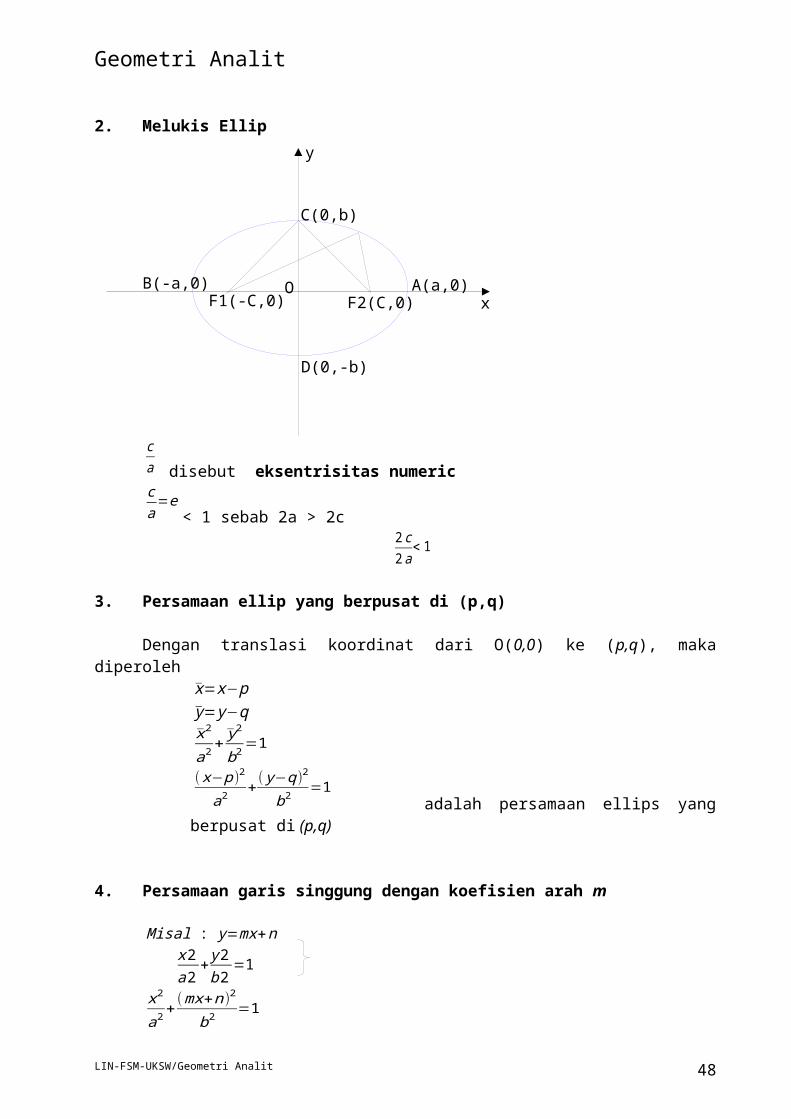
2. Melukis Ellip
ca disebut eksentrisitas numericca=e
< 1 sebab 2a > 2c
2c2a
< 1
3. Persamaan ellip yang berpusat di (p,q)
Dengan translasi koordinat dari O(0,0) ke (p,q), makadiperoleh
x=x−py=y−q x2
a2+y2
b2=1
(x−p)2
a2+(y−q)2
b2=1
adalah persamaan ellips yangberpusat di (p,q)
4. Persamaan garis singgung dengan koefisien arah m
Misal : y=mx+nx2a2
+y2b2
=1
x2
a2+(mx+n)2
b2=1
LIN-FSM-UKSW/Geometri Analit 48
Geometri Analit
b2x2+a2(m2x2+2mnx+n2)=a2b2b2x2+a2(m2x2+2mnx+n2)−a2b2=0(a2m2+b2)x2+2a2mnx+(a2n2−a2b2 )=0D=0 → (2a2mn )2−4 (a2m2+b2) (a2n2−a2b2)=0
4 a4m2n2−4 (a4m2n2−a4b2m2+a2b2n2−a2b4)=0a4b2m2−a2b2n2+a2b4=0a2b2 (a2m2−n2+b2)=0n2=a2m2+b2
n =± √a2m2+b2
y=mx±√a2m2+b2
5. Persamaan garis singgung ellips yang berpusat di (p,q)dengan koefisien arah m
x=x−py=y−q
y=m x±√a2m2+b2(y−q)=m(x−p)±√a2m2+b2
Buktikan :
1. Persamaan garis singgung di P(x1,y1) pada ellip x2
a2+y2
b2=1
adalah xx1
a2+yy1
b2=1
2. Persamaan garis singgung di P(x1,y1) pada ellip(x−p)2
a2+(y−q)2
b2=1
adalah (x−p) (x1−p)
a2+(y−q) (y1−q)
b2=1
LIN-FSM-UKSW/Geometri Analit 49

y
n
m
Q(x2,y3)
P(x2,y2)
T(x1,y1)
Geometri Analit
6. Persamaan Garis Kutub (R)
Persamaan garis singgung di P (m)xx1
a2+yy1
b2=1
Persamaan garis singgung di Q (n)xx3
a2+yy3b2
=1
T(x1,y1 ) →x1x2a2
+y1y2b2
=1 ...... ∗)
T(x1,y1 ) →x1x3a2
+y1y3b2
=1 ......∗∗)
Dari *) dan ** )t ernyata :
Garis singgung persamaaan xx1a2
+yy1b2
=1 , dipenuhi oleh titik P &
Q
Titik P & Q melalui garis : xx1
a2+yy1
b2=1
yang disebut gariskutub.
7. Garis Arah/direktriks
LIN-FSM-UKSW/Geometri Analit 50
F2(c,0)
P(x2,y2)
F1(-c,0)
d2 d1
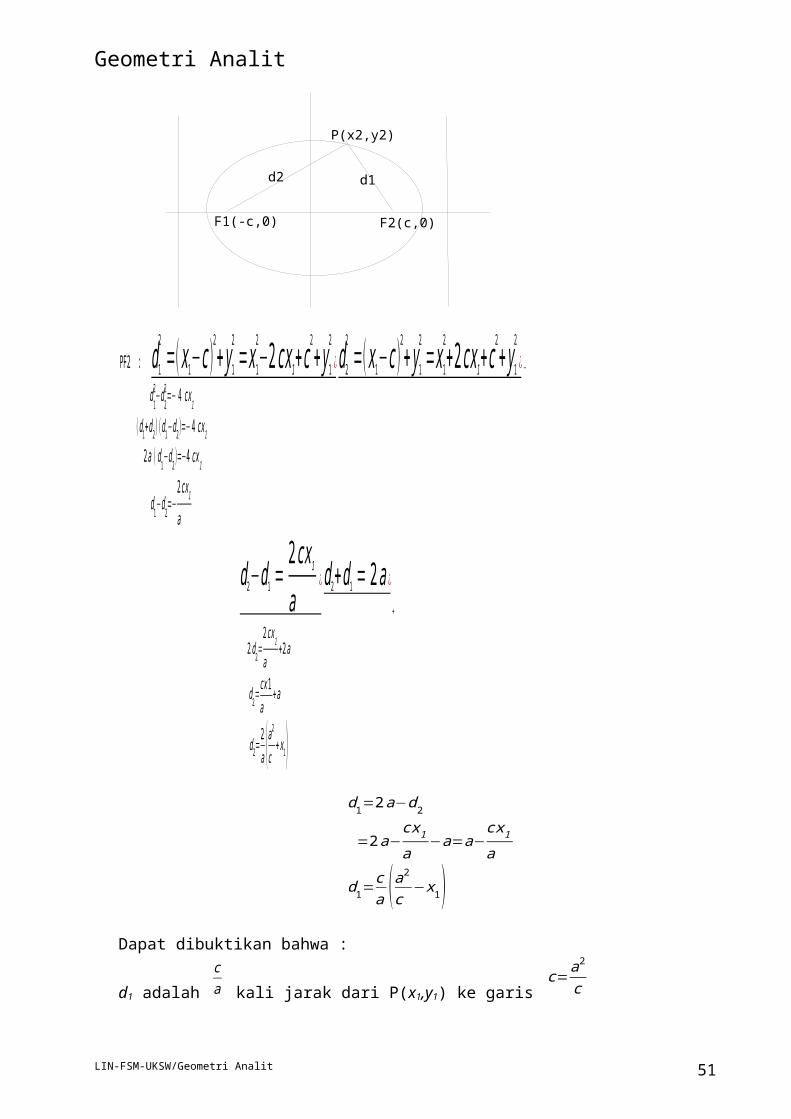
Geometri Analit
PF2 : d1
2=(x1−c)
2+y1
2=x1
2−2cx1+c
2+y1
2¿d2
2=(x1−c)
2+y1
2=x1
2+2cx1+c
2+y1
2¿ −
d12−d2
2=− 4 cx1(d1+d2) (d1−d2)=− 4 cx12a ( d1−d2)=−4 cx1
d1−d2=−2cx1a
d2−d1 =2cx1
a¿d2+d1 = 2a ¿
+
2d2=2cx1a
+2a
d2=cx1a
+a
d2=2a (a2c +x1)
d1=2a−d2
=2a−cx1a
−a=a−cx1a
d1=ca (a2c −x1)
Dapat dibuktikan bahwa :
d1 adalah ca kali jarak dari P(x1,y1) ke garis
c=a2c
LIN-FSM-UKSW/Geometri Analit 51

F2
y = mx
F1
TK
Geometri Analit
d2 adalah ca kali jarak dari P(x1,y1) ke garis
c=−a2
c
⇒ x=±a2
c disebut garis arah / direktrikBukti :F2Q1=F2R1+R1Q1=2a (dibuat)F2R1+R1F1=2a (ketentuan)
R1Q1=R1F1 ¿ }PF1=PQ (jari−jari ) ¿}¿¿ Δ PF1R1 ≃ Δ PR1Q1¿ ⇒ ∠ R1I= ∠ R1II
8. Garis Tengah Sekawan
Apakah tempat kedudukan titik-titik tengah dari garis yang //y = mx ?
{y=mx → persamaan garis yang // y=mx ¿¿¿¿x2
a2+(mx+n)2
b2=1
b2x2+a2 (m2x2+2 mnx+n2)=a2b2(b2+a2m2 )x2+2 mna2x+a2n2−a2b2=0
Misal : (x0,y0) pada TK, maka
LIN-FSM-UKSW/Geometri Analit 52

Geometri Analit
x0=12⋅−2 mna2
b2+a2m2=−
mna2
b2+a2m2
n=x0 (b2+a2m2)−ma2
⋅¿⋅¿ 1)
y0=m . −mna2
b2+a2m2+n =
−m2na2
b2+a2m2+n= n (−m2a2+b2+a2m2b2+a2m2 )
n =y0 (b2+a2m2 )b2
....... 2)
Dari 1) dan 2) diperoleh
x0 (b2+a2m2 )−ma2
=y0 (b2+a2m2 )b2
x0y0
=−ma2
b2 atau y0=−
b2
ma2x0
(x0,y0) dijalankan : y=− b2
ma2x adalah persamaan
garis tengah
Garis tengah-tengah y=mx & y=− b2
ma2x disebut garis tengah
sekawan dengan
m1=m ¿}¿¿¿
m1 x m2=mx . −b2
ma2
m1 m2=−b2
a2
Tampak bahwa : m1 m2 < 0 ; m1 & m2 berlawanan tanda , sehinggagaris tengah sekawan tersebut dipisahkan oleh sumbu-sumbukoordinat.
LIN-FSM-UKSW/Geometri Analit 53
Related Documents