GPS-free Positioning in Ad-Hoc GPS-free Positioning in Ad-Hoc Networks Networks Yu-Min Tseng

GPS-free Positioning in Ad-Hoc Networks Yu-Min Tseng.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
GPS-free Positioning in Ad-Hoc NetworksGPS-free Positioning in Ad-Hoc Networks
Yu-Min Tseng
TargetTarget
Not rely on GPSNot rely on GPS Use the distances between nodes to build Use the distances between nodes to build
a relative coordinate systema relative coordinate system Distance measurement methodDistance measurement method
• Signal strength methodSignal strength method• Angel of Arrival (AOA) methodAngel of Arrival (AOA) method• Time of Arrival (TOA) methodTime of Arrival (TOA) method
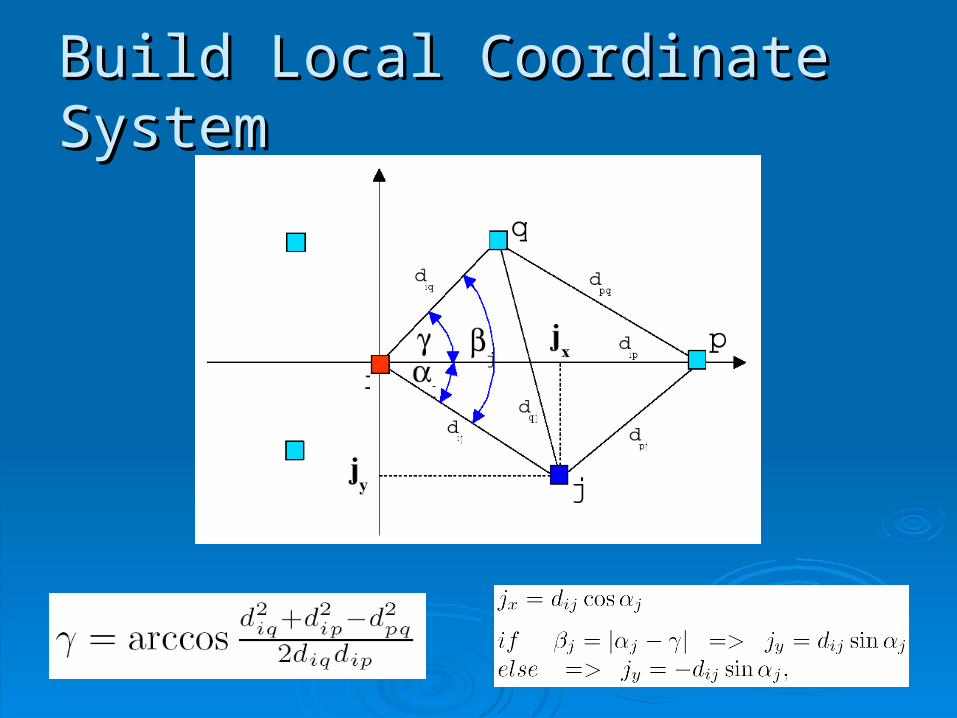
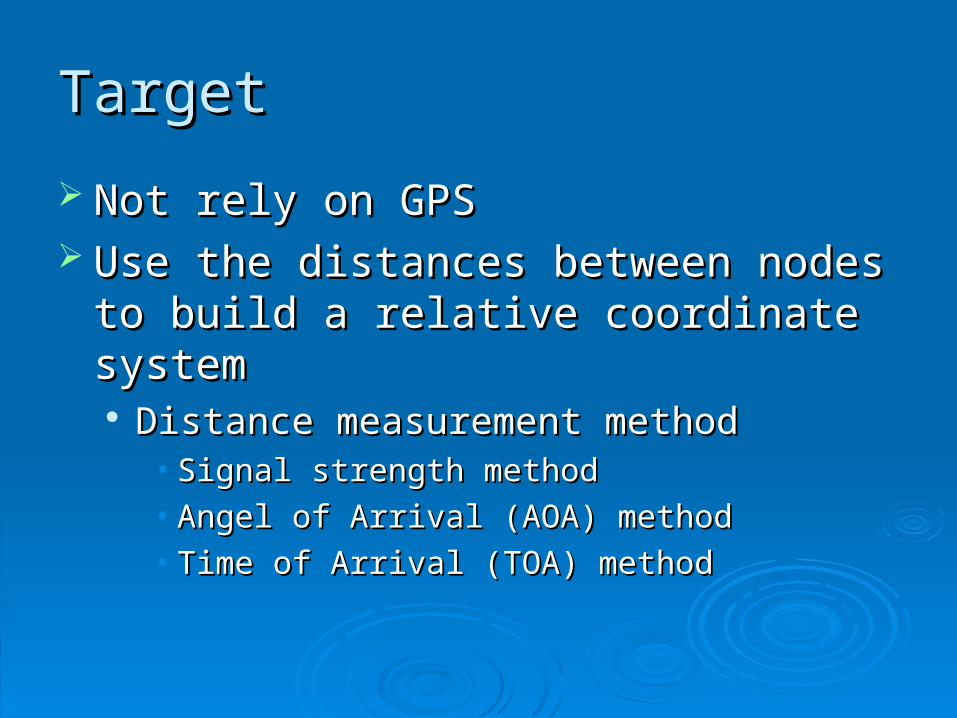
Build Local Coordinate SystemBuild Local Coordinate System

Build Local Coordinate SystemBuild Local Coordinate System
Detect one-hop neighbors (KDetect one-hop neighbors (K ii))
Measure the distances to one-hop neighbors (DMeasure the distances to one-hop neighbors (D ii))
Send KSend Ki i && DDi i to all one-hop neighborsto all one-hop neighbors
Choose node p & qChoose node p & q Local View Set for node i as a set of nodes LVSLocal View Set for node i as a set of nodes LVSii(p,q)(p,q)
K Kii such that , node i can compute the such that , node i can compute the
location of node jlocation of node j
iLVSj
),(LVS arg q) (p, iC)q,(p
maxikk
kk qp
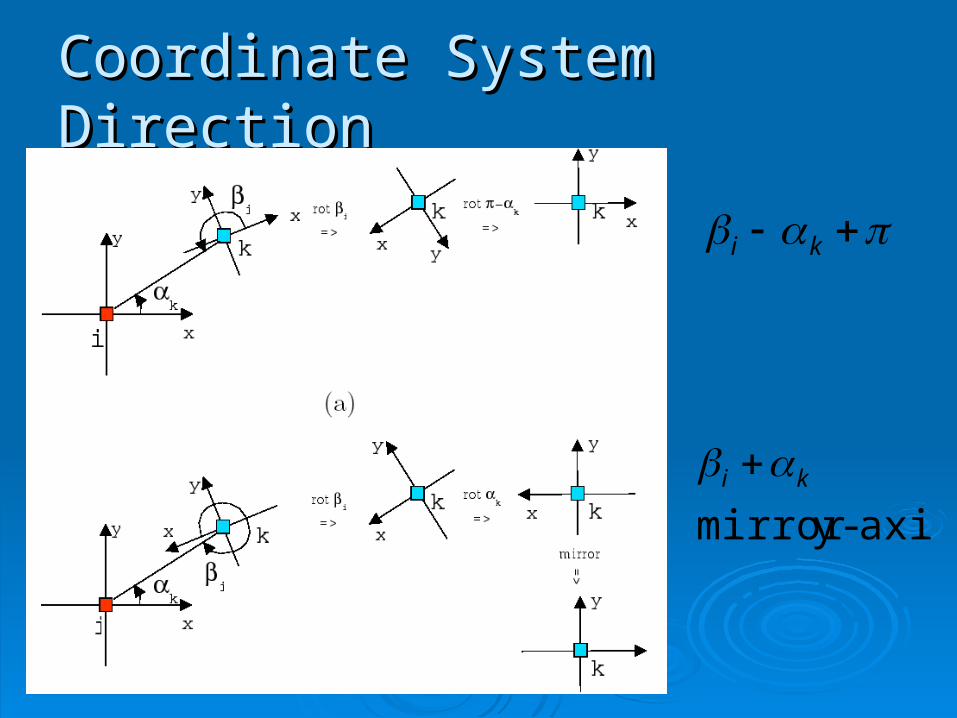
Coordinate System DirectionCoordinate System Direction
ki
axis-ymirror ki
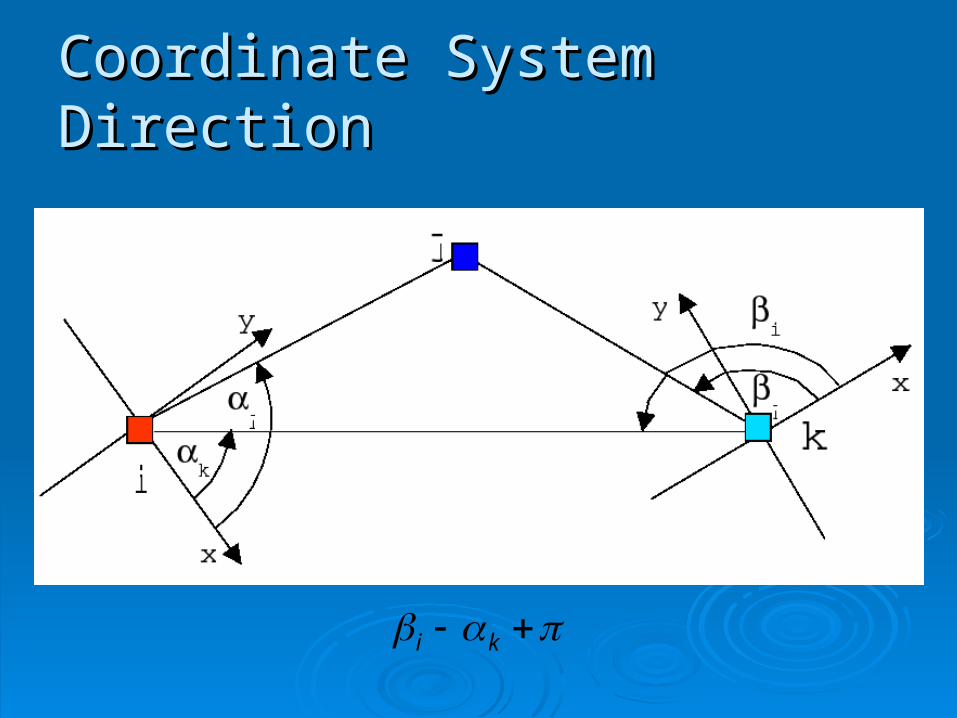
Coordinate System DirectionCoordinate System Direction
ki
Coordinate System DirectionCoordinate System Direction
ki
ikj
ikj
ki
ikj
ikj
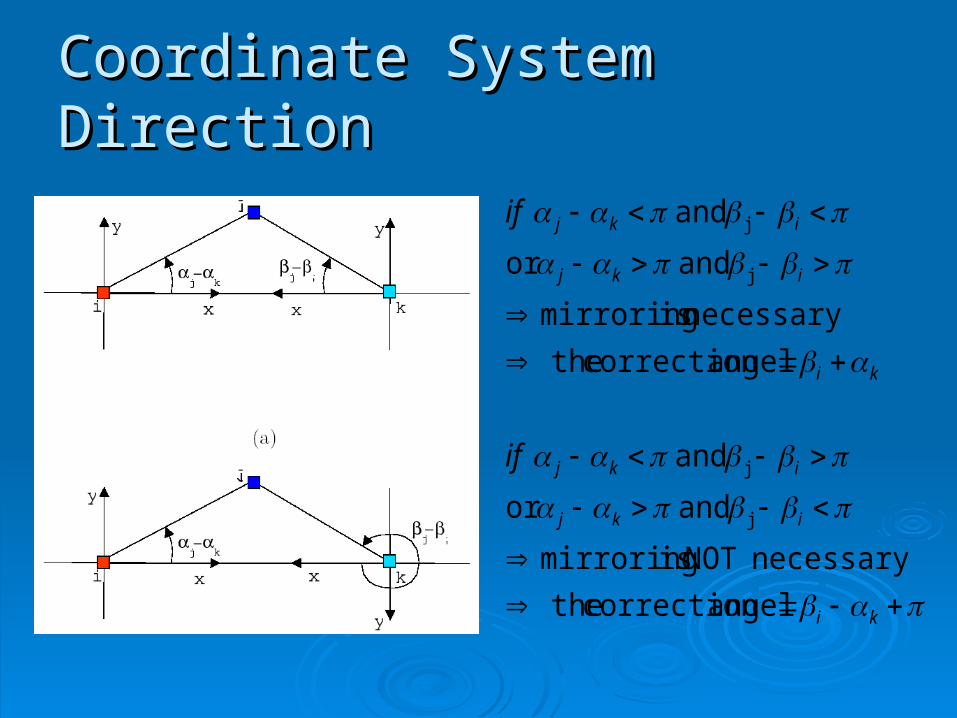
if
if
angel correction the
necessary NOT is mirroring
and or
and
angel correction the
necessary is mirroring
and or
and
j
j
j
j

Coordinate System DirectionCoordinate System Direction

Coordinate SystemCoordinate System
ProblemProblem The motion of node The motion of node ii will cause that all the will cause that all the
nodes have to re-compute their positionsnodes have to re-compute their positions Cause a large inconsistencyCause a large inconsistency Only used in small area networks, low mobilityOnly used in small area networks, low mobility
SolutionSolution Compute the center of the coordinate systemCompute the center of the coordinate system Message broadcastMessage broadcast Stable coordinate systemStable coordinate system

Location Reference GroupLocation Reference Group
Location Reference Group (LRG)Location Reference Group (LRG) The density of the nodes in the LRG is the The density of the nodes in the LRG is the
highest in the networkhighest in the network Network center is a relative position Network center is a relative position
dependent on the topology of the LRGdependent on the topology of the LRG Average speed of LRG center is much smaller Average speed of LRG center is much smaller
than the average speed of nodesthan the average speed of nodes
Location Reference GroupLocation Reference Group
How to obtain the LRG centerHow to obtain the LRG center Every node broadcast hello packet to its n-hop Every node broadcast hello packet to its n-hop
neighborhood to obtain node IDs, their mutual neighborhood to obtain node IDs, their mutual distances, the directions of their coordinate systemsdistances, the directions of their coordinate systems
Compute positions of the n-hop neighborsCompute positions of the n-hop neighbors Compute the n-hop neighborhood centersCompute the n-hop neighborhood centers
odneighborho hop-nin nodes ofnumber m
, c , c yx
m
jm
j yx
Location Reference GroupLocation Reference Group
Compute n-hop neighborhood direction as Compute n-hop neighborhood direction as average of coordinate system directionsaverage of coordinate system directions
Compute density factorCompute density factor• Density factor is the ratio between the number of Density factor is the ratio between the number of
nodes & the size of the observed areanodes & the size of the observed area

Location Reference GroupLocation Reference Group

Location Reference GroupLocation Reference Group
How to maintain the LRGHow to maintain the LRG Every node broadcast hello packet to its n-Every node broadcast hello packet to its n-
hop neighborhood to obtain node IDs, their hop neighborhood to obtain node IDs, their mutual distances, the directions of their mutual distances, the directions of their coordinate systems (same as init)coordinate systems (same as init)
Compare the n-hop neighbors list with the list Compare the n-hop neighbors list with the list of the LRG membersof the LRG members• The node that is a n-hop neighbor of LRG master The node that is a n-hop neighbor of LRG master
& the highest number of LRG nodes still in its n-& the highest number of LRG nodes still in its n-hop neighborhood is elected to be the new LRG hop neighborhood is elected to be the new LRG mastermaster
Location Reference GroupLocation Reference Group
• If the node doesn’t have the LRG master in its n-If the node doesn’t have the LRG master in its n-hop neighborhood, and the node doesn’t receive hop neighborhood, and the node doesn’t receive the new position information issued by LRG the new position information issued by LRG master, it starts the init proceduremaster, it starts the init procedure
Location Reference GroupLocation Reference Group
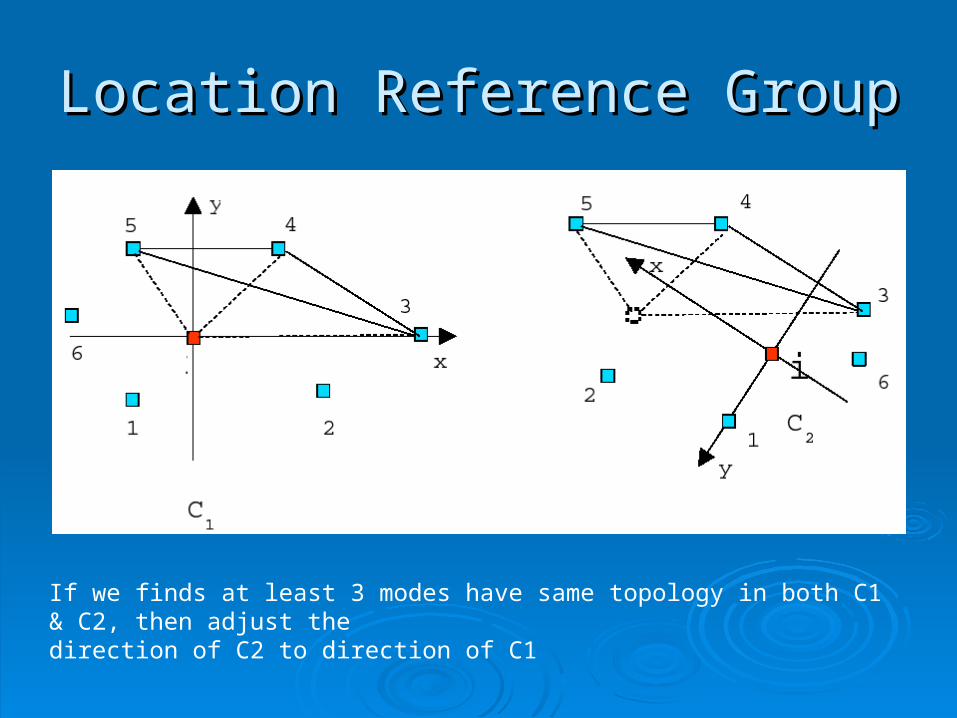
If we finds at least 3 modes have same topology in both C1 & C2, then adjust the direction of C2 to direction of C1

SimulationSimulation

DrawbackDrawback
Relative positioningRelative positioning When the reference moves, positions have When the reference moves, positions have
to be recomputed for nodes that have not to be recomputed for nodes that have not movedmoved
If intermediate nodes move, fixed nodes If intermediate nodes move, fixed nodes depending on them also have to depending on them also have to recompute positionrecompute position
Ad Hoc Positioning SystemAd Hoc Positioning System
At least 3 nodes (called landmarks) are At least 3 nodes (called landmarks) are GPS enhancedGPS enhanced
An arbitrary node has estimates to a An arbitrary node has estimates to a number (>= 3) of landmarks, it can number (>= 3) of landmarks, it can compute its own position in the plaincompute its own position in the plain
Use propagation method, all nodes infer Use propagation method, all nodes infer their distance to landmarkstheir distance to landmarks
Complexity of signaling is driven by the Complexity of signaling is driven by the number of landmarks, and by the average number of landmarks, and by the average degree of each nodedegree of each node
DV-Hop propagation methodDV-Hop propagation method
Each node maintain a table {XEach node maintain a table {X ii,Y,Yii,h,hii} & } &
exchanges updates only with its neighborsexchanges updates only with its neighbors The correction a landmark (XThe correction a landmark (X ii,Y,Yii) computes is ) computes is
j landmarks all,,)()( 22
jih
yyxxc
i
jiji
i

DV-Hop propagation methodDV-Hop propagation method
5.1726
40100 :1
L
42.1652
7540 :2
L
90.1556
00157 :3
L
Assume A gets its correction from L2, its estimate distance to the 3 landmarks would be: to L1, 3x16.42 ; to L2, 2x16.42 ; to L3, 3x16.42
Then plugged into the triangulation procedure to get an estimate location

DV-distance propagation methodDV-distance propagation method
Similar to DV-hop methodSimilar to DV-hop method Measured by using radio signal strength & Measured by using radio signal strength &
is propagated in meters rather than in is propagated in meters rather than in hopshops
Less coarse than DV-hop methodLess coarse than DV-hop method Not all hops have same sizeNot all hops have same size
Sensitive to measurement errorsSensitive to measurement errors

Euclidean propagation methodEuclidean propagation method
AB AC BC are known by estimation, and known by node A
The estimated distance of AL is obtained by applying Pithagora’s generalized theorem in triangles ACB BCL ACL
It is possible that A is on the different side of BC A’, the choice is made by voting or by examining relation with other common neighbors of B and C

SummarySummary
Setup Setup coordinate by coordinate by perimeter nodesperimeter nodes
Setup Setup coordinate by coordinate by every nodeevery node
Setup Setup coordinate by coordinate by landmarkslandmarks
GPSGPS No GPS.No GPS. No GPS.No GPS. Landmarks Landmarks need GPS.need GPS.
Coordinate Coordinate systemsystem
AbsoluteAbsolute RelativeRelative AbsoluteAbsolute
FloodingFlooding When initWhen init LRG need LRG need broadcast all,broadcast all,
Other nodes Other nodes broadcast n-hopbroadcast n-hop
PropagationPropagation
Related Documents