Facultad de Ingeniería Pesquera y Alimentos Escuela Profesional de Ingenieria de Alimentos Grupo Horario: 9 G Alumnos: T ucto .illegas$ /arol lisset &'(')&(0 Solis Han+a!a1a$2icole 3imena &'())94 Palomino 5rti# Francia ,arum" &'())0& 62I.78SI%A% 2ACI52A %7

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 1/25
Facultad de Ingeniería Pesquera y AlimentosEscuela Profesional de Ingenieria de Alimentos
Grupo Horario: 9 G Alumnos:
Tucto .illegas$ /arol lisset &'(')&(0
Solis Han+a!a1a$2icole 3imena &'())94 Palomino 5rti# Francia ,arum" &'())0&
62I.78SI%A%2ACI52A %7

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 2/25
Universidad Nacional del Callao
MOVIMIENTOARMÓNIO
!IMP"E
Física II P#gina $
8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 3/25
Universidad Nacional del Callao
INTRODUCCIÓN
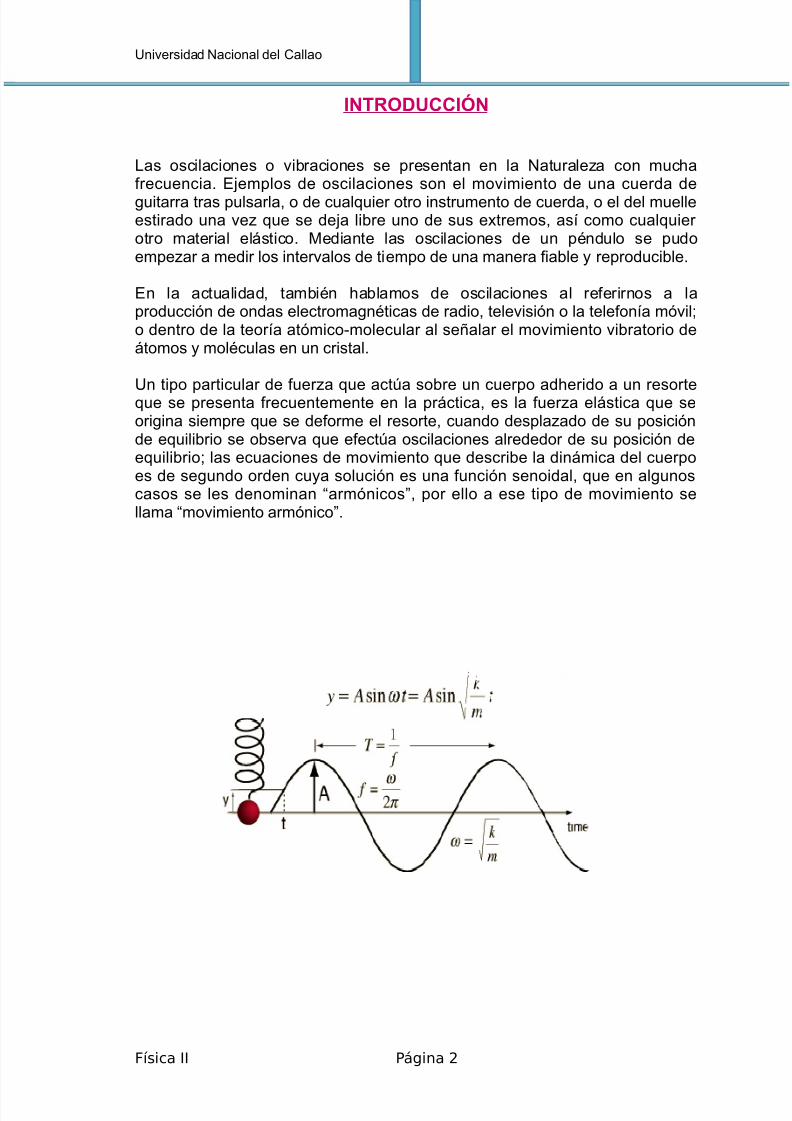
Las oscilaciones o vibraciones se presentan en la Naturaleza con muchafrecuencia. Ejemplos de oscilaciones son el movimiento de una cuerda de
guitarra tras pulsarla, o de cualquier otro instrumento de cuerda, o el del muelleestirado una vez que se deja libre uno de sus extremos, as como cualquier otro material el!stico. "ediante las oscilaciones de un p#ndulo se pudoempezar a medir los intervalos de tiempo de una manera fiable $ reproducible.
En la actualidad, tambi#n hablamos de oscilaciones al referirnos a laproducci%n de ondas electromagn#ticas de radio, televisi%n o la telefona m%vil&o dentro de la teora at%mico'molecular al se(alar el movimiento vibratorio de!tomos $ mol#culas en un cristal.
Un tipo particular de fuerza que act)a sobre un cuerpo adherido a un resorteque se presenta frecuentemente en la pr!ctica, es la fuerza el!stica que seorigina siempre que se deforme el resorte, cuando desplazado de su posici%nde equilibrio se observa que efect)a oscilaciones alrededor de su posici%n deequilibrio& las ecuaciones de movimiento que describe la din!mica del cuerpoes de segundo orden cu$a soluci%n es una funci%n senoidal, que en algunoscasos se les denominan *arm%nicos+, por ello a ese tipo de movimiento sellama *movimiento arm%nico+.
Física II P#gina %

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 4/25
Universidad Nacional del Callao
II. OBJETIVO
eterminar experimentalmente el periodo $ la frecuencia de oscilaci%n
del sistema.
-erificar las ecuaciones din!micas $ cinem!ticas que rigen el
movimiento arm%nico para el sistema masa'resorte.
III. FUNDAMENTO TEÓRICO
Física II P#gina &
8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 5/25
Universidad Nacional del Callao
El movimiento de oscilaci%n m!s
sencillo es el movimiento arm%nico
simple "/01, que se repiteperi%dicamente sin p#rdida de energa,
es decir, manteniendo la amplitud o
m!xima separaci%n de la partcula
oscilante respecto de su posici%n de
equilibrio. icha amplitud, A, $ el
periodo, T tiempo que tarda la
partcula en realizar cada oscilaci%n
completa1 determinan el "/0. En
lugar del periodo, T , a menudo se
caracteriza el "/0 por la frecuencia, f ,
igual al n)mero de oscilaciones
realizadas en un segundo.
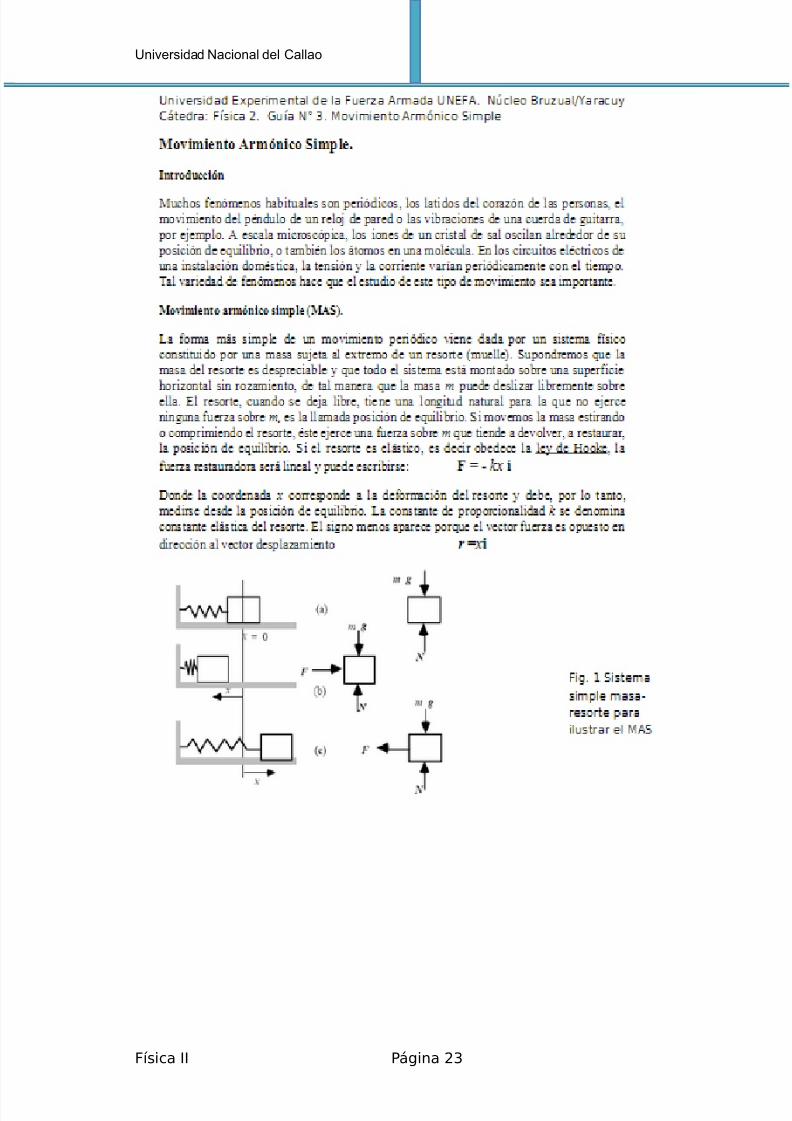
2ara establecer la fuerza que produce un "/0 pensamos en un muelle
el!stico, donde la fuerza que tenemos que ejercer para producirle unaelongaci%n, x , se expresa mediante la le$ de 3oo4e 5678'59571 es decir, es
ma$or cuanto ma$or es dicha elongaci%n F aplicada = K*x , siendo K una
constante que representa a la elasticidad del muelle1.
/l estirar el muelle, #l tira de
nuestra mano con una
fuerza de recuperaci%n igual$ de sentido opuesto
F muelle = -K·x 1. espu#s de
soltarlo, la fuerza de
recuperaci%n mantiene el
movimiento de oscilaci%n.
En estas condiciones, si el
muelle fuera perfectamente
el!stico, el movimiento de
oscilaci%n sera arm%nico
Física II P#gina '

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 6/25
Universidad Nacional del Callao
simple.
Las ecuaciones de un "/0 se pueden obtener relacionando la fuerza de
recuperaci%n de un muelle con la aceleraci%n $ #sta con la velocidad $ la
elongaci%n.
0e obtiene que las tres magnitudes posici%n, velocidad $ aceleraci%n1 tienen
una dependencia sinusoidal respecto del tiempo, siendo las gr!ficas que
representan su evoluci%n similares, si bien, la velocidad se desfasa un cuarto
de periodo respecto de la elongaci%n la velocidad es nula en las posiciones
extremas, d%nde es m!xima la elongaci%n1, $ la aceleraci%n se desfasa medio
periodo respecto de la elongaci%n, siendo proporcional $ de signo opuesto a
#sta en todo momento, la fuerza $ con ella la aceleraci%n, se opone a la
elongaci%n1.
Resortes:
La 0egunda Le$ de Ne:ton establece que ; < m=a donde m es la masa $ a la
aceleraci%n. La aceleraci%n se define como el cambio de la velocidad respecto
al tiempo. La velocidad es el cambio de la posici%n respecto al tiempo. Esto
implica que>
?, por lo tanto, la 0egunda Le$ de Ne:ton se puede escribir como>
Física II P#gina (

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 7/25
Universidad Nacional del Callao
0e busca una funci%n, x, cu$a segunda derivada sea igual a la misma funci%n
con signo contrario $ multiplicado por una constante. 0e propone la siguiente
funci%n trigonom#trica como soluci%n>
0ustitu$endo en la ecuaci%n anterior se obtiene>
onde recibe el nombre de frecuencia angular. @ es la frecuencia
representa el n)mero de oscilaciones o ciclos por unidad de tiempo $ se
relaciona con la frecuencia angular como A < B@ .
0ea D al perodo de oscilaci%n del movimiento arm%nico simple, esto es, el
tiempo requerido para completar un viaje redondo, definimos D como>
Física II P#gina )

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 8/25
Universidad Nacional del Callao
IV. EQUIPOS Y MATERIALES
N escripci%n c%digo cantidad
5 0ensor de movimiento C'69FB 5B Gesorte de metal 5
7 Gegla milimetrada C'66H5 5
F balanza 5
8 nterfase 5
6 -arilla met!lica de F8cm "E'I976 5
9 Jase de varilla largo "E'I978 5
I "asa de 5KKg 9
V. PROCEDIMIENTO
2GCE"END ? /CD-/E0
Física II P#gina *

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 9/25
Universidad Nacional del Callao
a. -erificar la conexi%n $ encendido de la interfase.b. ngresar el programa ata 0tudio $ seleccionar *crear experimento+.c. 0eleccionar el sensor de movimiento de la lista de sensores $ efectuar la
conexi%n usando los cables para transmisi%n de datos de acuerdo a lo
indicado por ata 0tudio.d. Efect)e la calibraci%n para el sensor de movimiento indicando una
frecuencia de muestreo de 7K 3z.e. Menere un gr!fico para cada uno de los par!metros medidos por el
sensor de movimiento posici%n, velocidad $ aceleraci%n1.f. Gealice el montaje de accesorios $ sensores tal como se observa en la
figura.
PRIMERA ACTIVIDAD: Determinai!n "e #a $n%tante "e E#a%tii"a"
a. etermine la posici%n de elongaci%n natural del resorte.b. Coloque diferentes masas en el porta pesos, el cual deber! ser pesado
previamente.c. etermine la elongaci%n en cada peso.d. Gegistre sus datos en las tabla 5.e. Gepita el proceso para cada masa.f. Mrafique peso vs. elongaci%n usando ata 0tudio.g. etermine la pendiente $ calcule la constante el!stica del resorte 4.
Dabla 5
Ma%a &'() *.*+ *., *.,+ *.- *.-+ *. *.+
Física II P#gina +

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 10/25
Universidad Nacional del Callao
E#$n(ai$ne% &m)
K.KKF K.K5 K.K56 K.KBB K.KBI K.K7F K.KF5
Constante de elasticidad 4> IK,5HB9I Nm
SE/UNDA ACTIVIDAD: Determinai!n "e# 0eri$"$ 1 #a 2re3enia "e$%i#ai!n
a. 0eleccione una masa de 5KKg col%quela en el porta pesas de modo queel sistema permita oscilaciones en una sola direcci%n.
b. etermine la posici%n de equilibrio, luego estire ligeramente el resorte $d#jelo oscilar, continuaci%n pulse el bot%n inicio para registrar laslecturas de posici%n, velocidad $ aceleraci%n respecto al tiempo.
c. Configure la calculadora para graficar peso versus elongaci%n $ no pesoversus posici%n.
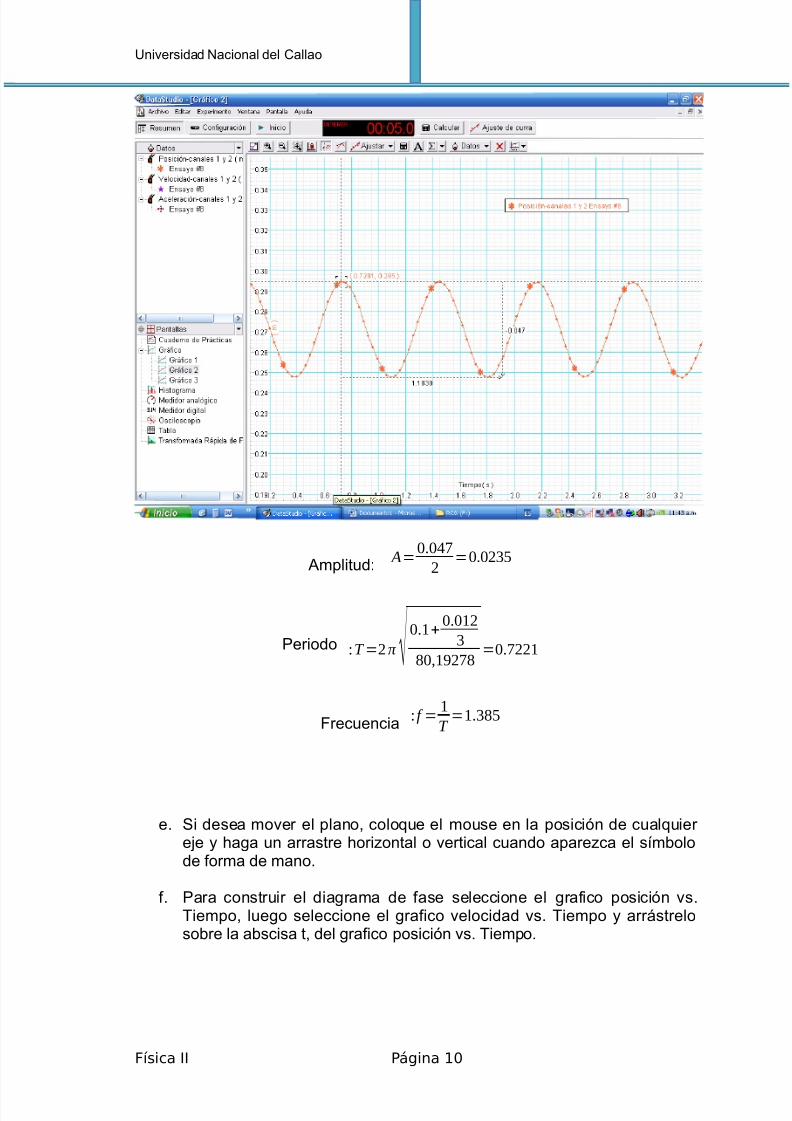
d. ;inalizada la toma de datos despu#s de cinco segundos $ haciendo usode la herramienta inteligente sobre las gr!ficas generadas calcule losiguiente> amplitud de la oscilaci%n, periodo de la oscilaci%n $ frecuenciade oscilaci%n.
Física II P#gina ,
8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 11/25
Universidad Nacional del Callao
/mplitud> A =
0.047
2=0.0235
2eriodo :T =2π √0.1+
0.012
3
80,19278=0.7221
;recuencia : f =
1
T =1.385
e. 0i desea mover el plano, coloque el mouse en la posici%n de cualquier eje $ haga un arrastre horizontal o vertical cuando aparezca el smbolode forma de mano.
f. 2ara construir el diagrama de fase seleccione el grafico posici%n vs.Diempo, luego seleccione el grafico velocidad vs. Diempo $ arr!strelosobre la abscisa t, del grafico posici%n vs. Diempo.
Física II P#gina $-

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 12/25
Universidad Nacional del Callao
VI. CONCLUSIONES Y SU/ERENCIAS
0e determino el periodo $ la frecuencia de oscilaci%n gracias a los
equipos, materiales $ el programa ata 0tudio que se realizo en el
laboratorio
0e llega a la conclusi%n que todo movimiento arm%nico tambi#n tiene
movimiento circular.
Física II P#gina $$

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 13/25
Universidad Nacional del Callao
0e verifico las ecuaciones del movimiento arm%nico derivando la
velocidad respecto al tiempo $ luego, la aceleraci%n derivando la
expresi%n de la velocidad $ tambi#n utilizando el Bda le$ de ne:ton.
VII. BIBLIO/RAFIA
http>intercentres.edu.gva.esiesleonardodavinci;isica"/0"/0K7.htm
http>oceanologia.ens.uabc.mxOfisica;0C/PL/J"ovimiento/rm
Q;7nico.pdf
CUESTIONARIO
5. RCu!l es el valor de la aceleraci%n de un oscilador con amplitud / $
frecuencia ; cuando su velocidad es m!ximaS
En cualquier movimiento, si la velocidad es m!xima es porque el cuerpo
no acelera m!s, por lo tanto la aceleraci%n es nula.
Física II P#gina $%

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 14/25
Universidad Nacional del Callao
En el oscilador, la velocidad es m!xima cuando pasa por la posici%n de
equilibrio. Centro de oscilaci%n1
"atem!ticamente>
x < /.cos :t1& derivamos>
v < dxdt < ' /.:.sen :t1& derivamos nuevamente>
a < dvdt < ' /.:B.cos :t1 < ' :B.x
e ac! que cuando x < K, a < K
B. R2ueden tener el mismo sentido la aceleraci%n $ el desplazamiento en
un movimiento arm%nico simpleS RLa aceleraci%n $ la velocidadS RLa
velocidad $ el desplazamientoS
En el movimiento arm%nico simple, la aceleraci%n tiene la misma direcci%n que
el desplazamiento, pero siempre con el sentido opuesto. Esto es consecuencia
de que en el sistema de referencia est!ndar& cuando el cuerpo se encuentra en
la posici%n correspondiente al desplazamiento cero, tambi#n la aceleraci%n es
cero $ la velocidad es m!xima& a partir de este punto, si la velocidad es positiva
el desplazamiento comenzara a crecer positivamente con el tiempo& pero en
este proceso, ira apareciendo una fuerza en direcci%n opuesta al
desplazamiento $ a la velocidad, que ira frenando el cuerpo, hasta alcanzar una
velocidad igual a cero, un desplazamiento positivo m!ximo $ una aceleraci%n
negativa m!xima en valor absoluto. espu#s la misma fuerza que freno al
cuerpo, comenzara a acelerarlo negativamente, de ese modo se generara una
velocidad negativa que ir! aumentando en valor absoluto, hasta llegar al
desplazamiento cero, donde tendr! la velocidad m!xima negativa $ de nuevo
una aceleraci%n igual a cero. ;ue necesario que la fuerza $ aceleraci%n tuviera
el signo contrario que el desplazamiento, para que el cuerpo que pasa por el
desplazamiento cero, pudiera regresar de nuevo al desplazamiento cero.
7. Re qu# forma se puede calcular el coeficiente de amortiguamientoS ?
RTu# tiempo trascurrir! para q la masa vuelva a su estado de reposoS
Los valores de algunas magnitudes, que designaremos por y t 1, varan con el
tiempo t seg)n la funci%n exponencial>
Física II P#gina $&

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 15/25
Universidad Nacional del Callao
onde A $ λ son n)meros reales positivos. 2ara t <K resulta y K1< A. Es decir,
el coeficiente A de la funci%n 51 siempre es el valor de y t 1 para t <K, por lo queaqu escribiremos esa funci%n as>
Tue est! representada en la figura 5 a partir de t <K.
Como se ve en la figura 5, y t 1 decrece desde su valor inicial y K1 hastaacercarse asint%ticamente a cero. 2or eso llamaremos a B1 funci%nexponencial decreciente. El decrecimiento es m!s o menos r!pidodependiendo del valor de . 2ara un mismo valor de t , tal como t 5 ;ig. 51,
es menor si . es ma$or.
Física II P#gina $'

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 16/25
Universidad Nacional del Callao
2or tanto puede utilizarse como indicador de la rapidez del decrecimiento dey t 1, $ se llama por eso coeficiente de amortiguamiento de la funci%nexponencial decreciente.
Cuanto ma$or sea el coeficiente de amortiguamiento de una funci%n
exponencial decreciente m!s r!pidamente decrece la funci%n. Como t delexponente de B1 es adimensional $ t designa al tiempo, la dimensi%n de estiempo a la menos uno, es decir, su unidad en el 0istema nternacional de
Unidades es S−1
.
EJEMPLO:
Un p#ndulo simple tiene un periodo de B s $ una amplitud de B. espu#s de 5Koscilaciones completas su amplitud se ha reducido a 5.8. 3alle la constante deamortiguamiento.
La amplitud del movimiento oscilatorio infra amortiguado disminu$eexponencialmente>
onde AK es la amplitud inicial para t < K. espejando de la expresi%n anterior la constante de amortiguamiento V cuando ha transcurrido un tiempo t 5 < NT <BK s>
F. RC%mo varia el coeficiente de amortiguamiento si la amplitud desciende
r!pidamente con el transcurrir del tiempoS ? RTu# movimiento se
realizaraS
Física II P#gina $(

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 17/25
Universidad Nacional del Callao
En este caso, que es m!s interesante, tenemos un oscilador que oscilaalrededor de la posici%n de equilibrio con amplitud decreciente. 0ucedecuando>
La soluci%n es>
Como antes, $ son constantes que dependen de las condiciones iniciales. Lapulsaci%n es>
La pulsaci%n del sistema amortiguado es un poco menor que la
pulsaci%n del sistema no amortiguado porque la fuerza que loamortigua, frena la masa $ la retarda.
La oscilaci%n del sistema est! descrita por una sinusoide de frecuencia
cu$a amplitud est! multiplicada por una exponencial
decreciente cu$a constante de tiempo es .
O%i#ai$ne% am$rti(3a"a%. La am0#it3" "e #a %in3%$i"e e%t4 $ntr$#a"a0$r #a e50$nenia#.
8. RTu# es el decremento logartmicoS, explique.
2ara caracterizar la cuanta del amortiguamiento se utilizan distintospar!metros, siendo uno de los m!s frecuentes el decremento logartmico, que
est! relacionado con la disminuci%n del valor m!ximo del desplazamiento, qm.,en la forma
Física II P#gina $)

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 18/25
Universidad Nacional del Callao
onde>
Gesultando>
-ariando el decremento logartmico en raz%n directa con el grado deamortiguamiento.0i se considera el cociente de dos elongaciones m!ximas no consecutivas,entre las que ha transcurrido n oscilaciones, se tendr! que su cociente es
Con lo que
? as
Gelaci%n que permite determinar el decremento logartmico a partir de lamedida de m!ximos no consecutivos con lo que puede mejorarse la exactitudde la determinaci%n sobre todo si se hacen las medidas sobre gr!ficas $ losm!ximos consecutivos tienen valores mu$ pr%ximos.
nversamente, si se conoce previamente se puede determinar mediante eln)mero de ciclos necesarios que han de transcurrir para que la elongaci%nm!xima se reduzca en un factor prefijado. /s, si se quiere determinar eln)mero de oscilaciones, nK, para que la amplitud se reduzca en el n)mero setendr! que
Es decir, puede interpretarse como la inversa del n)mero de oscilaciones queha de realizar el sistema para que la elongaci%n m!xima se reduzca en unfactor igual al n)mero e. Cuanto ma$or sea nK menor es el amortiguamiento deloscilador $ menor es el decremento logartmico.
6. REn qu# caso la grafica posici%n vs velocidad puede mostrar una
circunferenciaS, explique.
2ara que la gr!fica posici%n vs velocidad sea una circunferencia entonces nodebe haber variaciones en la amplitud.
Física II P#gina $*

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 19/25
Universidad Nacional del Callao
Esto, en un oscilador forzado s%lo ocurrir! fuera de la resonancia arriba oabajo de la misma1 si el tiempo es suficientemente largo.
e este modo la soluci%n transitoria se desvanecer! $ s%lo quedar! la soluci%n
particular que es la misma que la de un oscilador arm%nico.
9. REl valor de la frecuencia es igual al te%rico solo si se toma en cuenta la
masa del resorteS R2or qu#S
e la siguiente f%rmula se tiene>
T 6 √(m+
M
3)
K
Entonces la frecuencia que es f <1
T
0e puede apreciar que siendo " la masa del resorte $ m la masa en
suspensi%n en el resorte, se ve que el resultado de no tomarse en cuenta la
masa en suspensi%n provocar! una variaci%n $ no ser! igual a que solo se
considere la masa del resorte.
I. RCu!l es la diferencia entre un movimiento oscilatorio $ un movimiento
peri%dicoS
0e conoce con el nombre de movimiento peri%dico el de un cuerpo en el que
todas las magnitudes que sirven para su descripci%n posici%n, velocidad $
aceleraci%n1 toman el mismo valor cada intervalo regular de tiempo, llamado
periodo D1.
Meneralmente los movimientos oscilatorios son peri%dicos denomin!ndose
periodo de la oscilaci%n al tiempo que tarda en producirse una oscilaci%n
completa.
tra magnitud utilizada para describir el movimiento peri%dico es la frecuencia
f1 que es n)mero de oscilaciones que se producen en la unidad de tiempo.
Entre el periodo $ la frecuencia existe la siguiente relaci%n>
f <1
T
2or ejemplo, si la frecuencia es F oscilaciones en cada segundo, cada
oscilaci%n tardar! un cuarto de segundo K,B8 s1 en producirse.
Física II P#gina $+
8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 20/25
Universidad Nacional del Callao
La unidad de frecuencia en el 0 es el hertzio 3z1= que representa una
oscilaci%n o ciclo en cada segundo. 2uede representarse como s'5.
El movimiento arm%nico simple por brevedad lo llamaremos simplemente
"/01 es el m!s importante de los movimientos oscilatorios peri%dicos $a que
es el m!s sencillo de analizar $ constitu$e una descripci%n bastante precisa demuchas oscilaciones que se presentan en la naturaleza. /dem!s cualquier
movimiento oscilatorio peri%dico se puede considerar como la superposici%n
suma1 de varios "./.0.
La aceleraci%n de un "./.0. es producida por una fuerza recuperadora, es
decir, una fuerza que es proporcional al desplazamiento del m%vil $ va dirigida
hacia el punto de equilibrio. 0i es as, al sistema que oscila se le llama
oscilador arm%nico, $ es un modelo matem!tico que pocos osciladores reales
cumplir!n exactamente excepto en m!rgenes mu$ limitados.
Ejemplos de "./.0. son el del p#ndulo cuando las oscilaciones son peque(as o
el movimiento libre de un muelle horizontal tras haberlo comprimido o estirado.
H. R0e cumple el principio de conservaci%n de la energa en el sistema
masa'resorteS
esde un punto de vista energ#tico, un sistema oscilante es un sistema que
transforma continuamente energa cin#tica en energa potencial el!stica $
viceversa. 2ara estirar o comprimir el muelle ha$ que realizar un trabajo, por
ello decimos que el muelle en esa situaci%n adquiere energa potencial el!stica.
espu#s el muelle espont!neamente adquiere energa cin#tica a costa de la
consiguiente p#rdida de energa potencial el!stica.
0ucede al rev#s cuando se va frenando.
0i suponemos al sistema aislado, es decir que ni le damos energa ni el
sistema pierde energa por rozamiento o por cualquier otra causa, la cantidad
total de energa que tendr! el sistema ser! constante. Eso es lo mismo que
decir que la suma de la energa cin#tica $ de la energa potencial el!stica ser!
constante.
E total = E cinética + E potencial elástica = constante
Lo que es constante es la suma de las dos energas, no cada una de ellas por separado. Efectivamente, la energa cin#tica vara desde un valor m!ximo
Física II P#gina $,
8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 21/25
Universidad Nacional del Callao
cuando pasa por la posici%n de equilibrio donde la velocidad es m!xima1 a un
valor nulo cuando se encuentra en las posiciones de m!xima separaci%n de la
posici%n de equilibrio puntos en los que la velocidad es nula1& por el contrario,
la energa potencial el!stica es m!xima cuando el cuerpo est! en la posici%n
m!s separada $ nula cuando pasa por la posici%n de equilibrio.
La energa total del sistema oscilante, es decir, la suma de la energa cin#tica $
potencial el!stica, es un valor constante que coincide con el valor m!ximo de la
energa cin#tica $ con el valor m!ximo de la energa potencial el!stica que son
iguales1.
e modo que la energa del sistema oscilante la podemos obtener de tres
formas en un instante determinado siendo su posici%n x $ su velocidad v1>
E t$ta# 6 E 0$t m45 6 7 8 A-
E t$ta# 6 E in m45 6 7 m 9- m45 6 7 m - A- 6 - ;- m 2 - A-
E t$ta# 6 7 8 5- < 7 m 9-
Las ecuaciones anteriores son v!lidas no s%lo para el caso de un muelle sinoque tambi#n pueden aplicarse a un p#ndulo en este caso la energa potenciales gravitatoria1 $, en general, a cualquier movimiento arm%nico simple
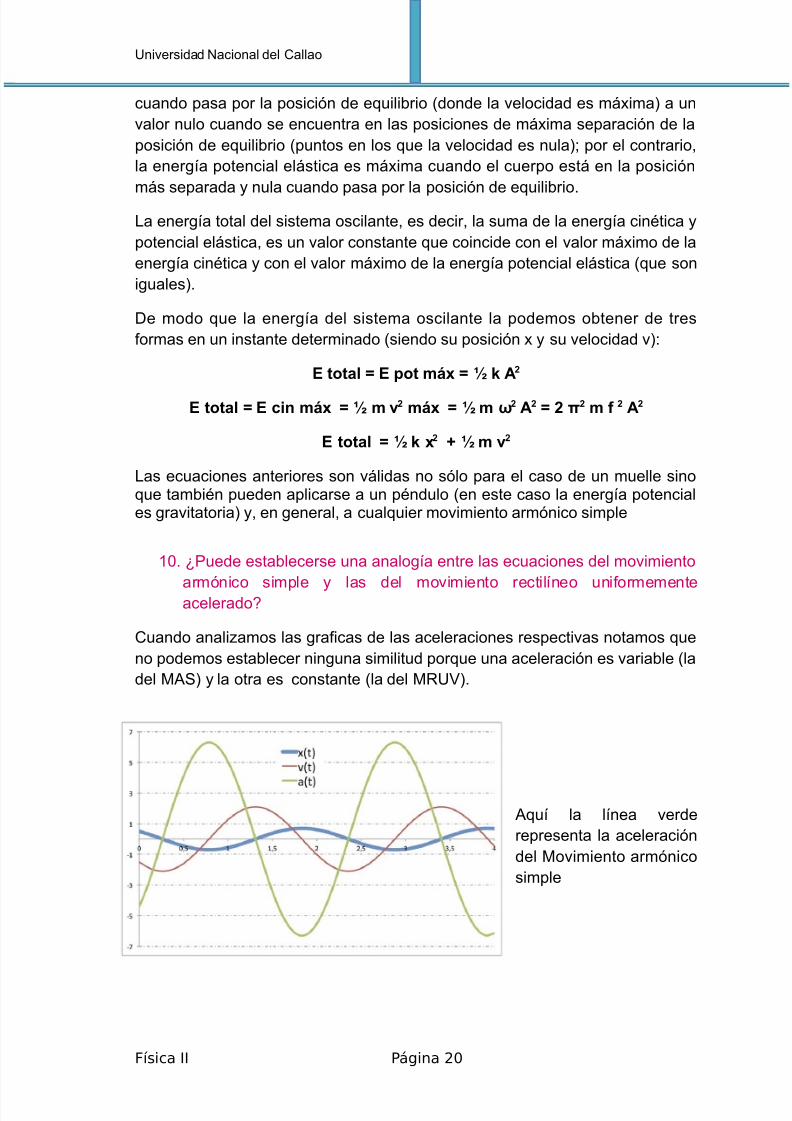
5K. R2uede establecerse una analoga entre las ecuaciones del movimiento
arm%nico simple $ las del movimiento rectilneo uniformementeaceleradoS
Cuando analizamos las graficas de las aceleraciones respectivas notamos que
no podemos establecer ninguna similitud porque una aceleraci%n es variable la
del "/01 $ la otra es constante la del "GU-1.
/qu la lnea verde
representa la aceleraci%n
del "ovimiento arm%nico
simple
Física II P#gina %-
8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 22/25
Universidad Nacional del Callao
$ % & ' (-
-/(
$
$/(
%
%/(
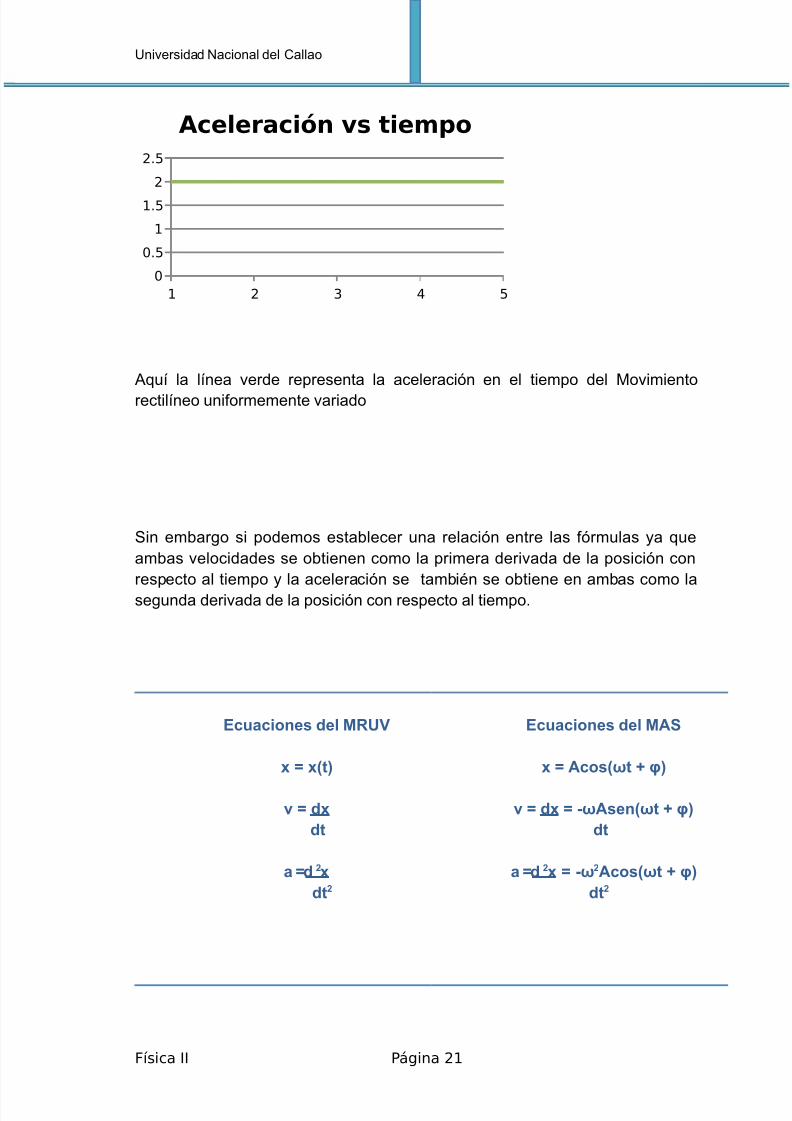
Aceleración vs tiempo
/qu la lnea verde representa la aceleraci%n en el tiempo del "ovimiento
rectilneo uniformemente variado
0in embargo si podemos establecer una relaci%n entre las f%rmulas $a que
ambas velocidades se obtienen como la primera derivada de la posici%n con
respecto al tiempo $ la aceleraci%n se tambi#n se obtiene en ambas como la
segunda derivada de la posici%n con respecto al tiempo.
E3ai$ne% "e# MRUV
5 6 5&t)
9 6 "5 "t
a 6" - 5 "t-
E3ai$ne% "e# MAS
5 6 A$%&t < =)
9 6 "5 6 >A%en&t < =) "t
a 6" - 5 6 >-A$%&t < =) "t-
Física II P#gina %$

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 23/25
Universidad Nacional del Callao
ANE?OS
Física II P#gina %%
8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 24/25
Universidad Nacional del Callao
Física II P#gina %&

8/16/2019 FISICA 2 Movimiento Armonico
http://slidepdf.com/reader/full/fisica-2-movimiento-armonico 25/25
Universidad Nacional del Callao
Related Documents











