Technische Universität Darmstadt, Fachbereich Elektrotechnik und Informationstechnik Schloßgartenstr. 8, 64289 Darmstadt, Germany - URL: www.TEMF.de Dr.-Ing. Herbert De Gersem Institut für Theorie Elektromagnetischer Felder Lecture Series Finite-Element Electrical Machine Simulation in the framework of the DFG Research Group 575 „High Frequency Parasitic Effects in Inverter-fed Electrical Drives” http://www.ew.e-technik.tu-darmstadt.de/FOR575 Dr.-Ing. Herbert De Gersem summer semester 2006 Institut für Theorie Elektromagnetischer Felder

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Technische Universität Darmstadt, Fachbereich Elektrotechnik und InformationstechnikSchloßgartenstr. 8, 64289 Darmstadt, Germany - URL: www.TEMF.de
Dr.-
Ing.
Her
bert
De
Ger
sem
In
stitu
t für
The
orie
Ele
ktro
mag
netis
cher
Fel
der
Lecture Series
Finite-Element Electrical Machine Simulation
in the framework of the DFG Research Group 575„High Frequency Parasitic Effects
in Inverter-fed Electrical Drives”http://www.ew.e-technik.tu-darmstadt.de/FOR575
Dr.-Ing. Herbert De Gersemsummer semester 2006
Institut für Theorie Elektromagnetischer Felder

2
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rGeneral Information
• Contact: Herbert De Gersem– email (preferred): [email protected]– 06151-164801– room 133 in this building (S2/17)
• Schedule– almost every Thursday: 15:00-16:40– (also at Thursday: 17:00-18:00
Seminar Computation Engineering)– exact schedule + contents of the lectures
→ website: http://www.ew.e-technik.tu-darmstadt.de/FOR575
• Examination: on demand

3
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rGeneral Information
• Schedule– next Thursday 27.4: no lecture !!– next lecture: Thursday 4.5– see website: http://www.ew.e-technik.tu-darmstadt.de/FOR575

4
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rForeknowledge
• Electromagnetic field theory- vector algebra + grad/div/curl- Maxwell laws + potentials- analytical solution techniques for PDEs
• Electrical machine theory- DC, induction and synchronous machines- rotating field theory, equivalent circuits, DQ-axes- ferromagnetic materials
• Numerical simulation- linear algebra, systems of equations- analyse, approximation theory

5
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rStructure
Simulation techniques• overview• FE/FD/FIT discretisation• static simulation• non-linear materials• time-harmonic and
transient simulation• modelling of motion• permanent magnet material• field-circuit coupling• hysteresis models• coil models• optimisation
Examples• DC machine • transformer• induction machine• linear machine• synchronous
machine• single-phase motor• magnetic bearing• reluctance machine• magnetic brake
lecture series

6
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rMethodology
at every simulation step• machine-theoretical considerations (e.g.)
– relevant ↔ unrelevant phenomena– linear ↔ nonlinear behaviour
• field-theoretical considerations (e.g.)– formulations (magnetoquasistatic, full Maxwell equations, ...)– spatial effects (→ circuit and/or field simulation)– skin depth (→ grid resolution)– alternating and/or rotating fields
(→ scalar or vectorial hysteresis model)• numerical considerations (e.g.)
– computer configuration, algebraic solution methods– discretisation error (space/time)– loss of accuracy for derived quantities (torque, ...)
7
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rRelated Courses (1)
electrical machines– SS Elektrische Maschinen, Antriebe und Bahnen
(Binder)– SS Elektrische Maschinen und Antriebe I und II
(Binder)– WS Electrical Machines and Drives I (Binder)– SS/WSDesign of Electrical Machines and Actuators with
Numerical Field Simulation (Binder, Funieru)
8
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rRelated Courses (2)
electromagnetic field theory & field simulation– WS Technische Elektrodynamik (Weiland)– SS: Verfahren und Anwendungen der Feldsimulation
(Weiland, Ackermann)– WS Electromagnetic Field Simulation
(De Gersem, Gjonaj)– WS Finite Elements in Electromagnetism (Munteanu)

9
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rLiterature (1)
international journal– IEEE Transactions on Magnetics– IEEE Transactions on Energy Conversion– Archiv für Elektrotechnik
international conferences• ICEM : Int. Conf. on Electrical Machines (2006: Crete)
• Compumag : Int. Conf. on the Computation of EM Fields (2007: Aachen)
• CEFC : IEEE Conf. on EM Field Computation (2006: Miami)
• EMF : Int. Workshop on Electric and Magnetic Fields (2006: France)
• SPEEDAM : Symposion on Power Electronics and Electrical Drives (2006: Capri)
• IEMDC : IEEE Int. Electric Machines and Drives Conf.

10
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rLiterature (2)
books– J.P.A. Bastos, N. Sadowski, „Electromagnetic Modeling by Finite
Element Methods“, 2003.– K. Hameyer, R. Belmans, „Numerical Modelling and Design of
Electrical Machines and Devices“, 1999.– M. Kaltenbacher, „Numerical Simulation of Mechatronic Sensors
and Actuators“, 2004.– E. Kallenbach et al., „Elektromagnete“, 2003.– ...

11
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rForeknowledge
• Electromagnetic field theory- vector algebra + grad/div/curl- Maxwell laws + potentials- analytical solution techniques for PDEs
• Electrical machine theory- DC, induction and synchronous machines- rotating field theory, equivalent circuits, DQ-axes- ferromagnetic materials
• Numerical simulation- linear algebra, systems of equations- analyse, approximation theory

12
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rSoftware
• semi-analytical- SPEED
• field simulation (commercial tools)- Ansys → TUD-EW- Maxwell (Ansoft)- MagNet (Infolytica)- Flux2d/Flux3d (Cedrat)- Opera (VectorFields)- EMStudio (CST) → TUD-TEMF
• field simulation (tools at university)- FEMAG (ETH Zürich) → TUD-EW- MEGA (Univ. Bath) → TUD-EW- Olympos (K.U. Leuven) → TUD-TEMF- Dido (TUD-TEMF) → TUD-TEMF
13
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rOverview
• semi-analytical techniques (overview)• magnetic equivalent circuit• rotating-field theory• equivalent circuits + standard tests
• analytical model supported by field simulatione.g. reluctance machine
• magnetoquasistatic formulation• discretisation in space
14
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
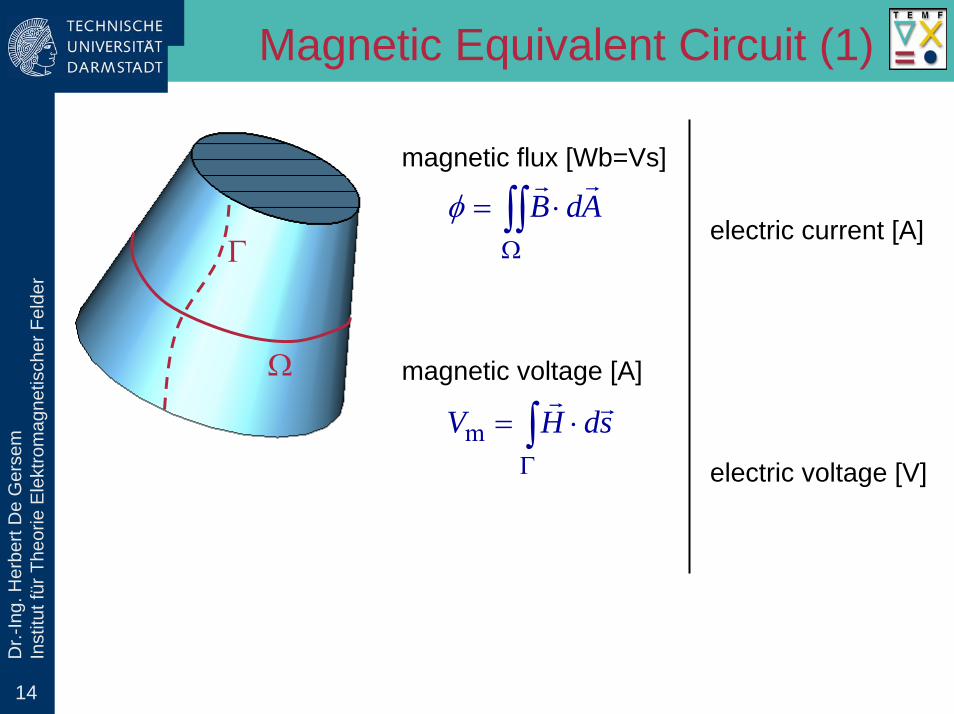
rMagnetic Equivalent Circuit (1)
Ω
= ⋅∫∫rr
B dAφ
mΓ
= ⋅∫r rV H ds
Γ
Ω
magnetic flux [Wb=Vs]
electric current [A]
magnetic voltage [A]
electric voltage [V]

15
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rMagnetic Equivalent Circuit (2)
µ
S
l
φ
mV mV mVtN
I
φ φ
reluctance= magnetic resistance
coil= magnetic voltage
induced currents= magnetic inductance
m m=dV Ldtφ
m m=V R φ m t=V N I
me
1=L
Rm =lRSµ

16
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
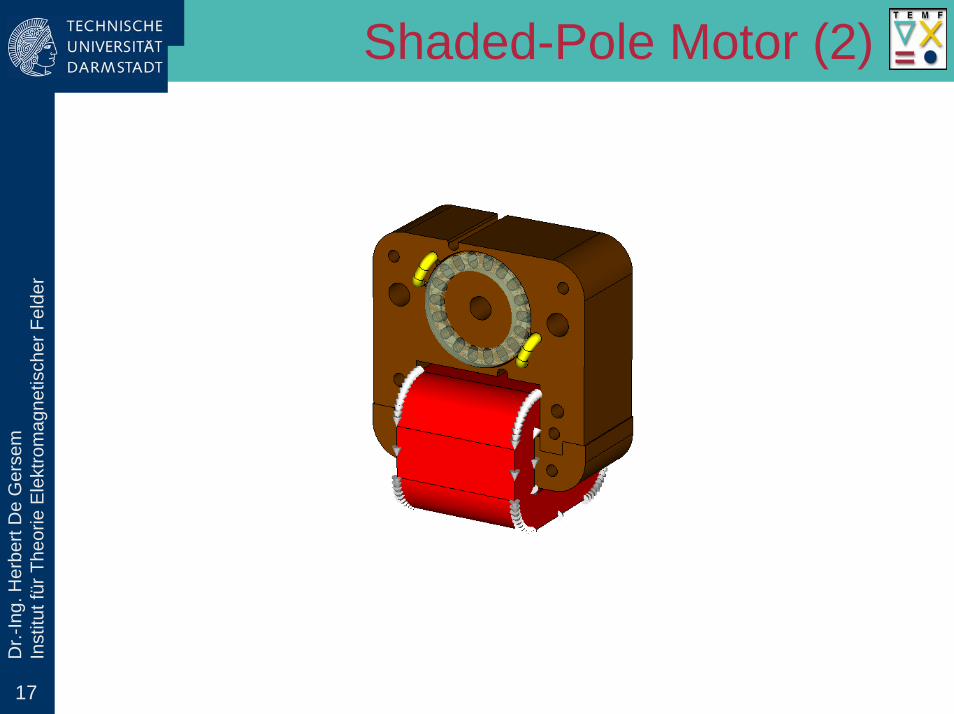
rShaded-Pole Motor (1)
coil
short-circuited ring
squirrel cage
stator bridge
17
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rShaded-Pole Motor (2)

18
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rShaded-Pole Motor (3)
stL rtL
( )st rtφ
+dL Ldt
mV
m=V
stRrtR
( )st rt+ + φR R
φ
air gap
air gap
ag+ φR

19
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rMagnetic Equivalent Circuit (3)
• but- ferromagnetic saturation ?- eddy-current effects ?- motional parts ?

20
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
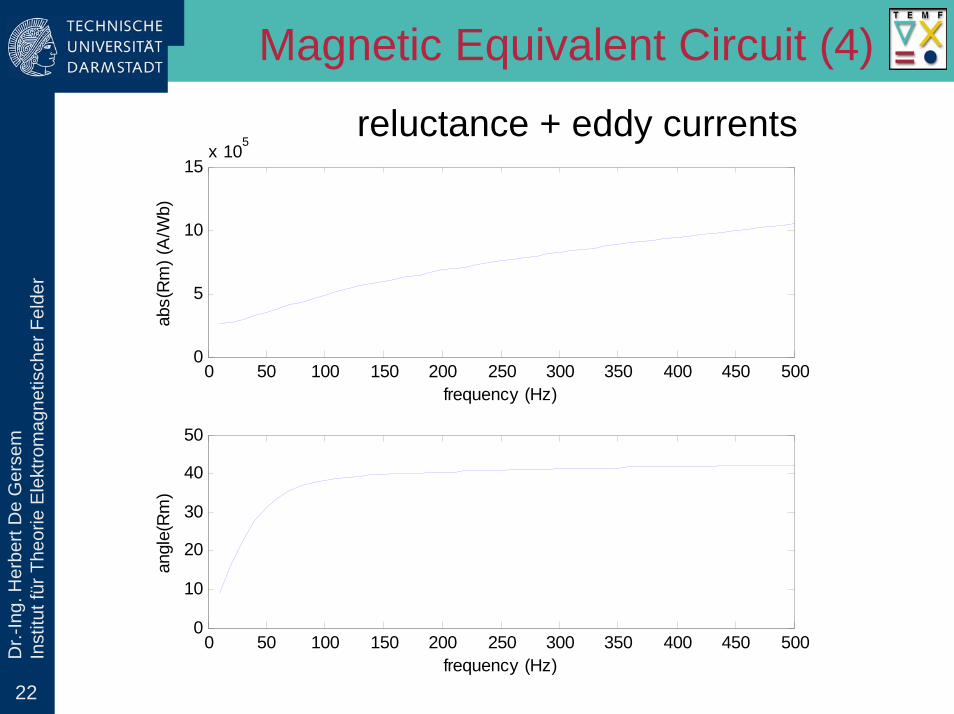
rMagnetic Equivalent Circuit (4)
B
H
1B
1H
µ1ν
BmR
Sν
=l
B Sφ =
ferromagnetic saturation

21
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rMagnetic Equivalent Circuit (5)
Ampère∂
= −∂
zHJrθ
=E Jθ θρ=z zB Hµ
Faraday-Lenz1 ∂∂ ⎛ ⎞− = −⎜ ⎟∂ ∂⎝ ⎠
zz
Hr j Hr r r
ρ ωµ
2 2 0′′ ′+ − =z z zr H rH j r Hωµσ
Ohm
magnetic
l µ
2=S Rπ
φ
mV
zH
Jθ
rz θ
modified Bessel equation
( )( )
0m
0=
lz
I rVHI R
ξξ
1+= =
jjξ ωµσδ
skin depth( )( )
1m
0
2=
l
I RV RI R
ξπ µφξ ξ
( )( )
0m 2
1
12+
=l I Rj RR
I RR
ξδ ξµπ
22
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rMagnetic Equivalent Circuit (4)
0 50 100 150 200 250 300 350 400 450 5000
5
10
15x 105
frequency (Hz)
abs(
Rm
) (A
/Wb)
0 50 100 150 200 250 300 350 400 450 5000
10
20
30
40
50
frequency (Hz)
angl
e(R
m)
reluctance + eddy currents
23
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
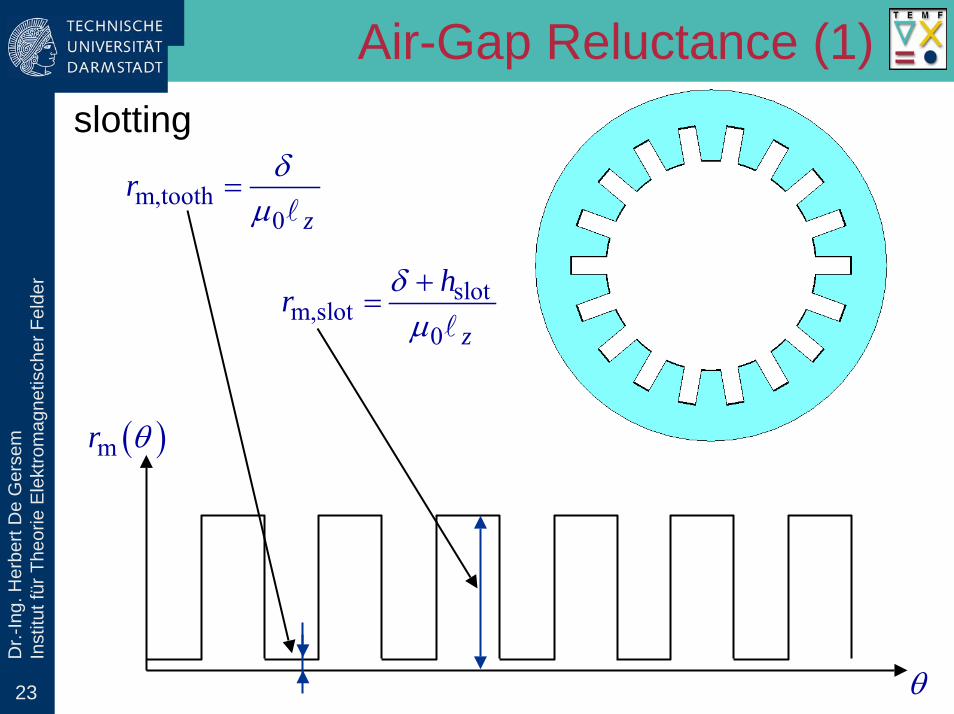
rAir-Gap Reluctance (1)
θ
( )mr θ
m,tooth0
=l z
r δµ
slotm,slot
0
+=
l z
hr δµ
slotting

24
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rAir-Gap Reluctance (2)
θ
( )mr θ
ct m,1 m,212
= +r r r
t
m,2
sin2=a rλ
λα
λ
( )m ct0
cos≠
= + ∑r r aλλ
θ λθ
tα
m,1r
m,2r

25
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rOverview
• semi-analytical techniques (overview)• magnetic equivalent circuit• rotating-field theory• equivalent circuits + standard tests
• analytical model supported by field simulatione.g. reluctance machine
• magnetoquasistatic formulation• discretisation in space
26
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
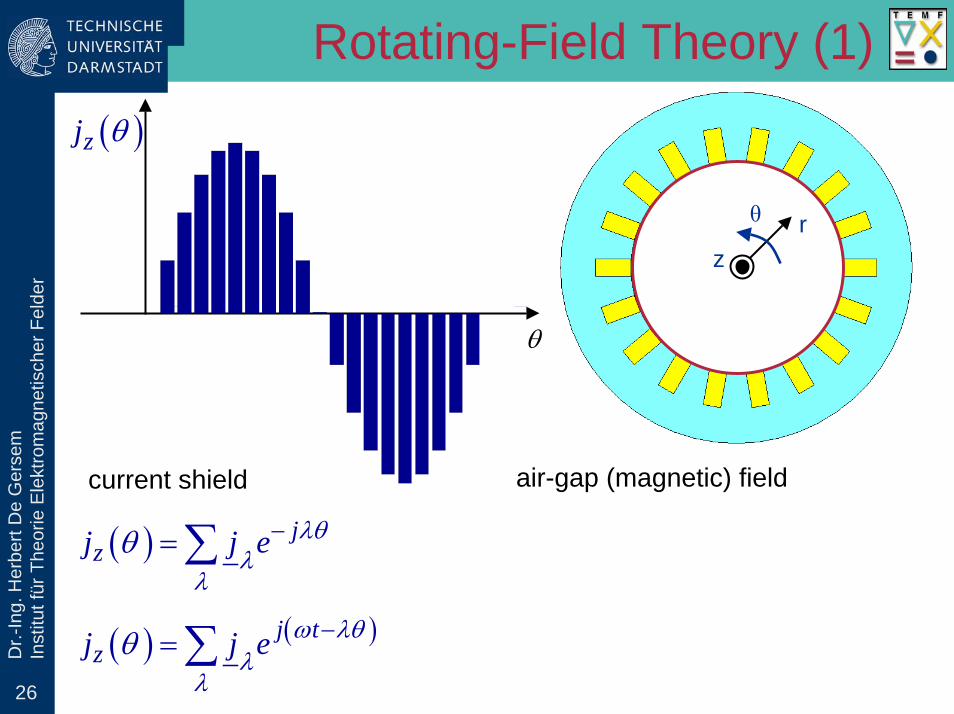
rRotating-Field Theory (1)
( )zj θ
θ
current shield air-gap (magnetic) field
rz
θ
( ) −= ∑ jzj j e λθ
λλ
θ
( ) ( )−= ∑ j tzj j e ω λθ
λλ
θ

27
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rRotating-Field Theory (2)
= ∞µ
0=µ µ
( )zj θ
( )rH θ
= ∞µ
r
zθδ
Ampère
( ) ( ) ( )+ − =r r zH d H j Rdθ θ δ θ δ θ θ
( )=rz
dH R jd
θθ δ air-gap (magnetic) field
( ) ( )−= ∑ j trb b e ω λθ
λλ
θ

28
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rRotating Fields (1)
re im( ) Re cos sinω= = ω − ωj tI t I e I t I t

29
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rRotating Fields (2)
( )( , ) Re j tt a e ω −λθλ
λ∈Λ
⎧ ⎫⎪ ⎪θ = ⎨ ⎬⎪ ⎪⎩ ⎭∑u
( , )tθu ( , ) Re ( ) j tt e ωθ = θu u
θ
ω angular frequency
wave numberλ
synω
ω =λ
wave velocity

30
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rAngular Slip Frequency
mω
′θ
mt′θ = θ +ω
( )( )m( , ) Re j tt a e ′ω−λω −λθλ
λ∈Λ
⎧ ⎫⎪ ⎪θ = ⎨ ⎬⎪ ⎪⎩ ⎭∑u
s,λω
angular slip frequencysame amplitudessame wave numbersdifferent frequencies
( )( , ) Re j tt a e ω −λθλ
λ∈Λ
⎧ ⎫⎪ ⎪θ = ⎨ ⎬⎪ ⎪⎩ ⎭∑u
θ
31
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rOverview
• semi-analytical techniques (overview)• magnetic equivalent circuit• rotating-field theory• equivalent circuits + standard tests
• analytical model supported by field simulatione.g. reluctance machine
• magnetoquasistatic formulation• discretisation in space
32
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rEquivalent Circuits (1)
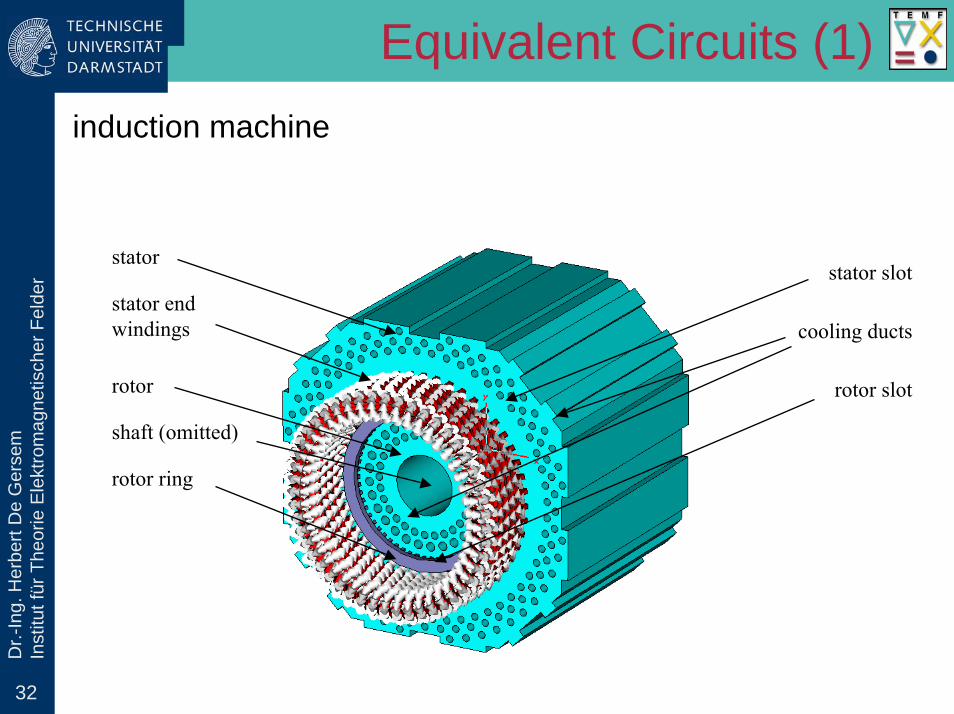
induction machine
stator
stator endwindings
rotor
rotor ring
shaft (omitted)
cooling ducts
stator slot
rotor slot

33
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rEquivalent Circuits (2)
equivalent circuit
XR1
U_ 1
I_1
R2'1σX
h1X
I_ 0
2σ'
I_ 2'
RFe
I RFe_ (1-s)
sR2'______I_µ

34
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rEquivalent Circuits (3)
no-load test
R1 X
X hE
I 0
U0,line3
P03
1σ
RFe

35
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rEquivalent Circuits (4)
short-circuit test
R1 X 1σ R'2Xσ2'
Rk Xk
I kPk3
Uk,line3
36
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rOverview
• semi-analytical techniques (overview)• magnetic equivalent circuit• rotating-field theory• equivalent circuits + standard tests
• analytical model supported by field simulatione.g. reluctance machine
• magnetoquasistatic formulation• discretisation in space

37
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rReluctance Machine

38
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rDirect- & Quadrature Axis
direct axis quadrature axis
seen from one of the phases
22 tt
m
NSL NR
µ= =
lL high L low
θ

39
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rModel
( )( ) ( ) d tu t R i tdtψ
= + voltage in a coil
( ) ( )( ) ( ) ( ) ( )di t dLu t R i t L i tdt dt
θθ= + +
m( ) ( )( ) ( ) ( ) ( ) ( )di t dLu t R i t L t i t
dt dθθ ωθ
= + +
mechanical velocity
inductance L(θ) dependenton rotor angle
electromagneticfield simulation
torque ( ) co
ct,
i
dWT id
θθ =
=

40
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rApproach (1)
(first try)• magnetic field simulation
→ magnetic vector potential formulation• transversal symmetry
→ 2D model• lamination→ no eddy currents → static simulation
• important ferromagnetic saturation expected→ nonlinear simulation
41
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
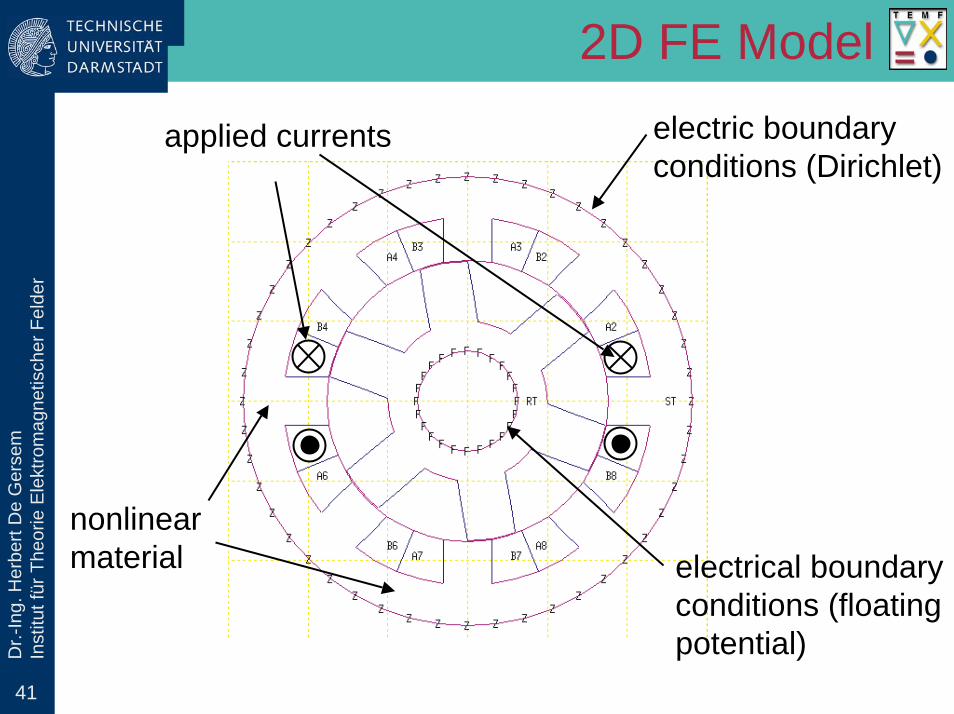
r2D FE Model
electric boundary conditions (Dirichlet)
electrical boundary conditions (floatingpotential)
nonlinear material
applied currents
42
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
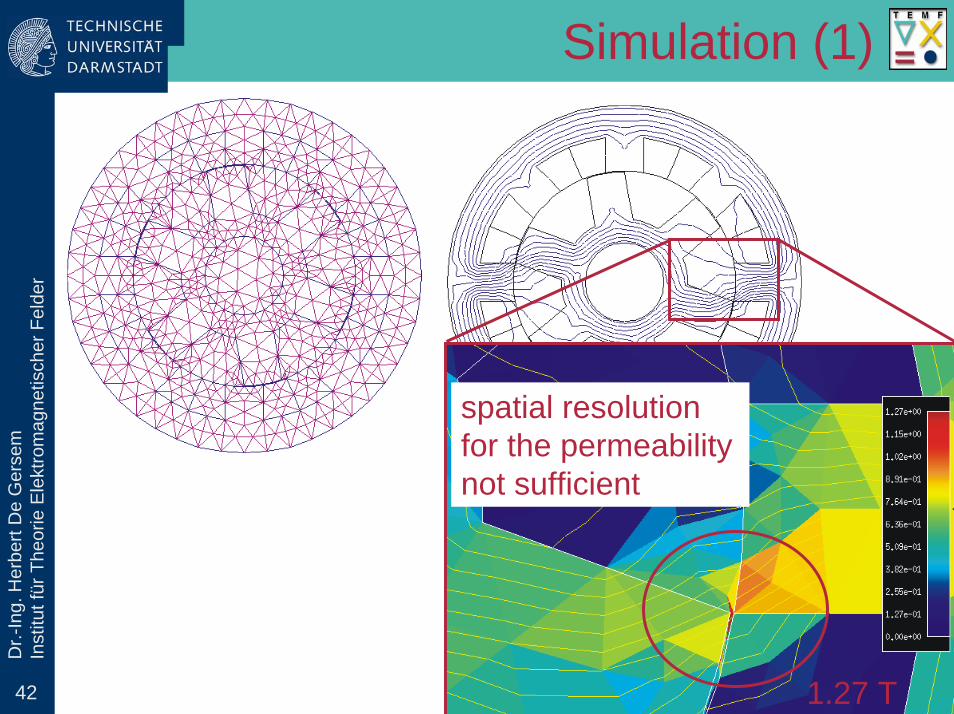
rSimulation (1)
1.27 T
spatial resolution for the permeabilitynot sufficient

43
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rApproach (2)
(second try)• magnetic field simulation
→ magnetic vector potential formulation• transversal symmetry
→ 2D model• lamination
→ no eddy currents → static simulation• important ferromagnetic saturation expected
→ nonlinear simulation
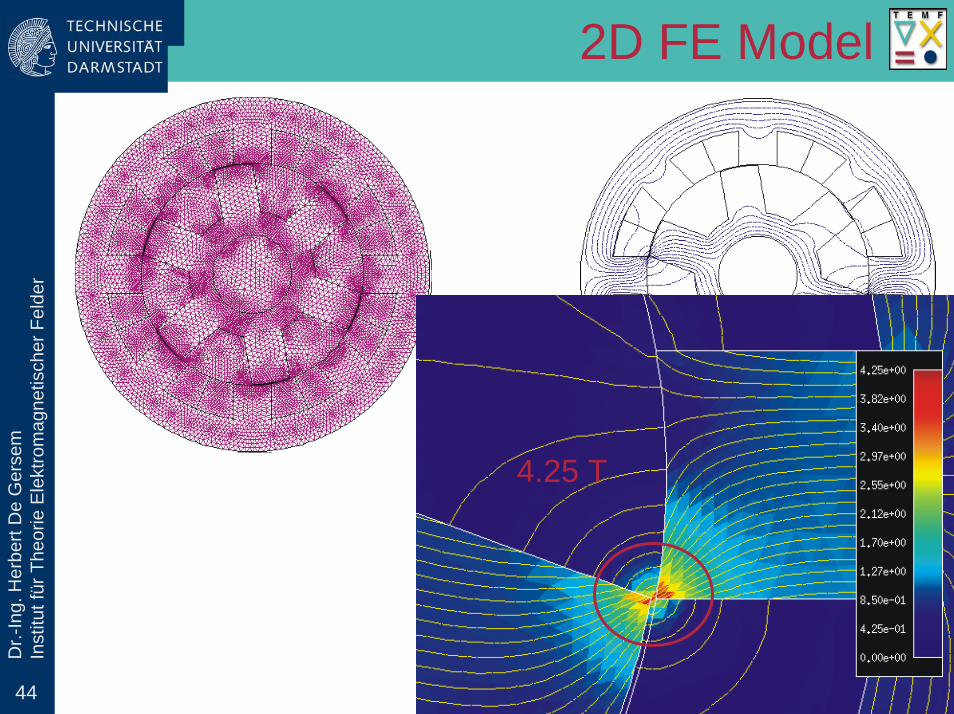
• local saturation→ adaptive mesh refinement till e.g. the relative change
of the magnetic energy < 1%
44
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
r2D FE Model
4.25 T

45
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
r3D End Effects (1)
coil
magneticallyactive length
end parts→ ‚fringing‘ effect→ leakage inductance
yoke length zl
aktiv z>l l
assumptions→→ leakage inductance independent of thesaturation and the rotor angle
aktiv zγ=l l
Lσ
Lσ

46
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rApproach (3)
(third try)• magnetic field simulation
→ magnetic vector potential formulation• transversal symmetry
→ 2D model• lamination
→ no eddy currents → static simulation• important ferromagnetic saturation expected
→ nonlinear simulation• local saturation
→ adaptive mesh refinement till e.g. the relative change of the magnetic energy < 1%
• end effects, compute and→ compare 3D and 2D models→ linear simulation (smaller grids)
γLσ

47
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
r3D End Effects (2)
linear simulation
48
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
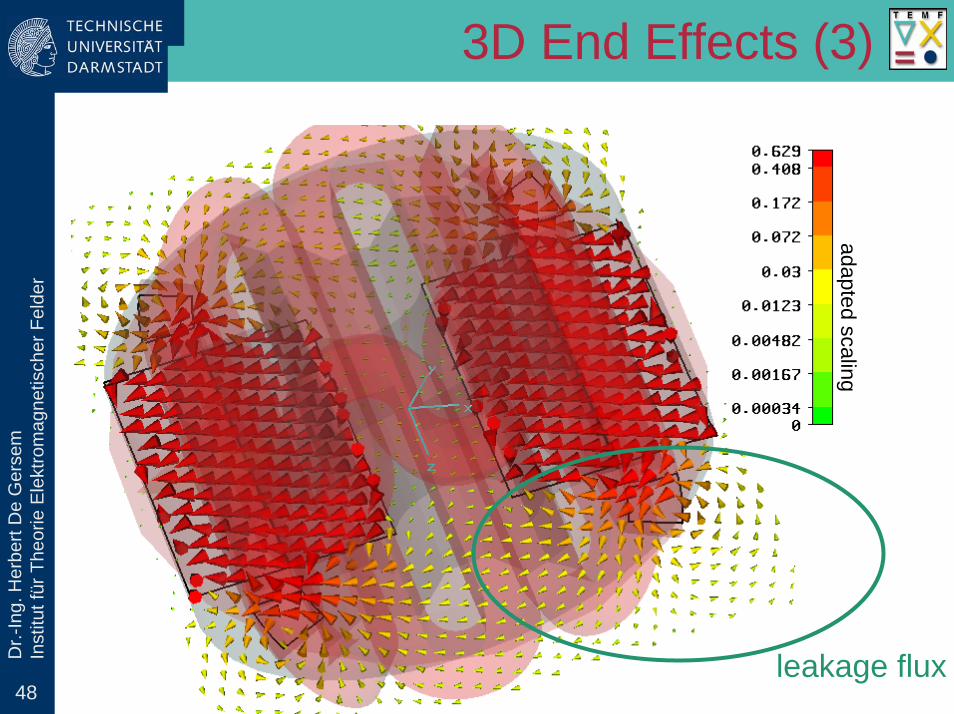
r3D End Effects (3)
leakage flux
adapted scaling

49
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
r3D End Effects (4)
linear models
2magn,3D 3D
12
W L i= 2magn,2D 2D
12
W L i=
3D,d 2D,dL L Lσγ= +
2D2D m
( )( ) ( )( ) ( ) ( ) ( ) ( )dLdi t di tu t R i t L t i t Ldt d dtσ
θγ θ γ ωθ
= + + +
3D,q 2D,qL L Lσγ= +
50
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rApproach (4)
(fourth try)• magnetic field simulation
→ magnetic vector potential formulation• transversal symmetry
→ 2D model• lamination
→ no eddy currents → static simulation• important ferromagnetic saturation expected
→ nonlinear simulation• local saturation
→ adaptive mesh refinement till e.g. the relative change of the magnetic energy < 1%
• end effects, compute and→ compare 3D and 2D models→ linear simulation (smaller grids)
• automate the whole procedure in order to carry out parameter variation and optimisation steps
γLσ
51
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
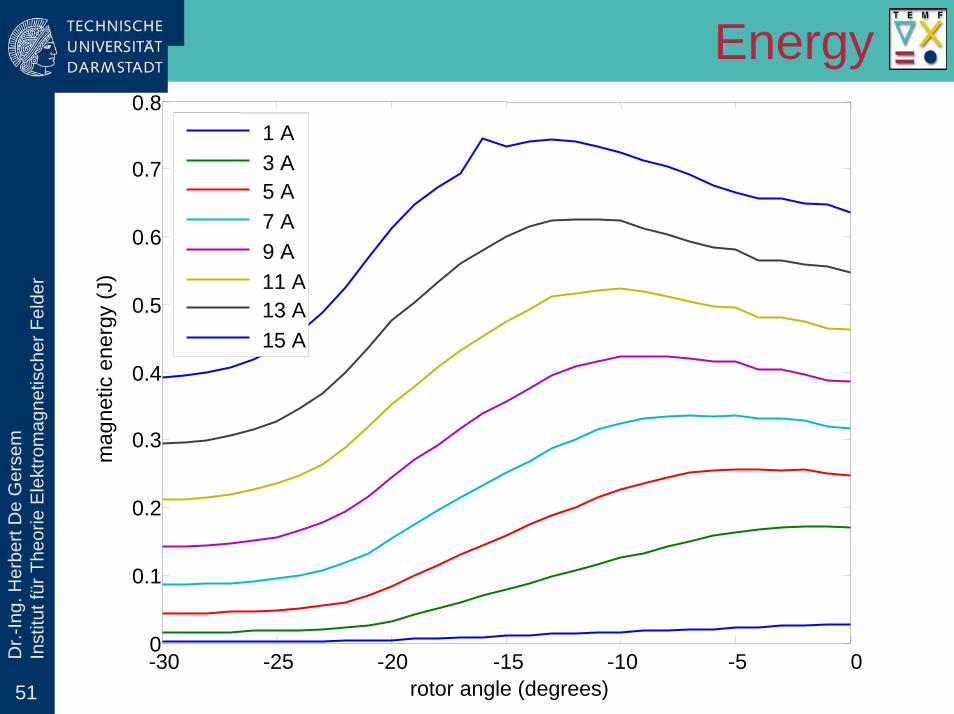
rEnergy
-30 -25 -20 -15 -10 -5 00
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
rotor angle (degrees)
mag
netic
ener
gy(J
)1 A3 A5 A7 A9 A11 A13 A15 A
52
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
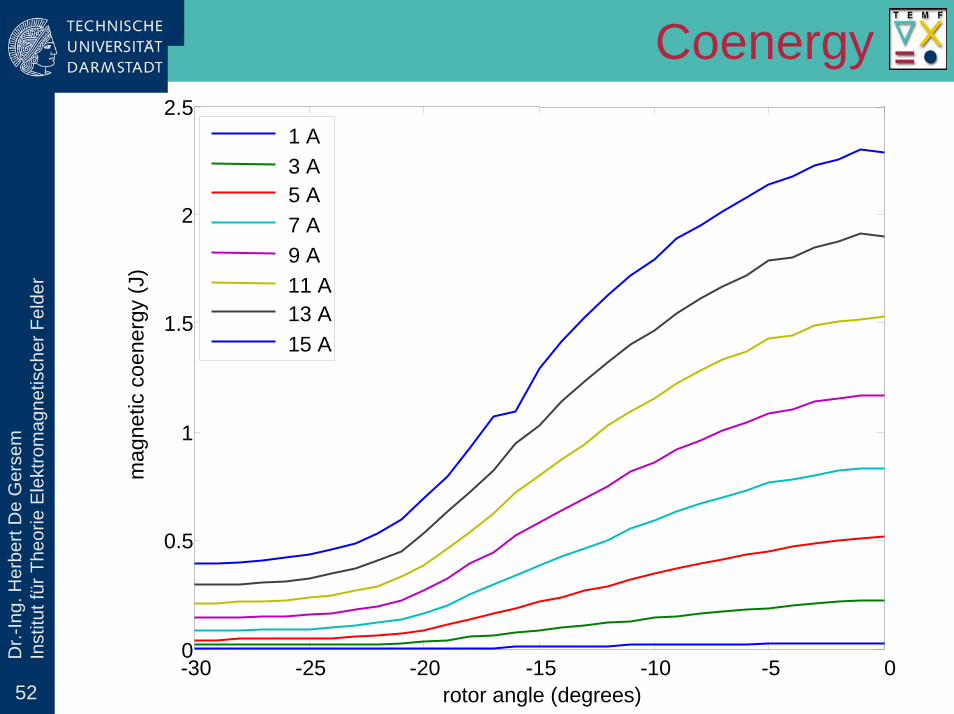
rCoenergy
-30 -25 -20 -15 -10 -5 00
0.5
1
1.5
2
2.5
rotor angle (degrees)
mag
netic
coe
nerg
y(J
)1 A3 A5 A7 A9 A11 A13 A15 A

53
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rTorque
-30 -25 -20 -15 -10 -5 0-2
0
2
4
6
8
10
12
rotor angle (degrees)
torq
ue(N
m)
1 A3 A5 A7 A9 A11 A13 A15 A
lower accuracy

54
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rOverview
• semi-analytical techniques (overview)• magnetic equivalent circuit• rotating-field theory• equivalent circuits + standard tests
• analytical model supported by field simulatione.g. reluctance machine
• magnetoquasistatic formulation• discretisation in space

55
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rEM Field Simulation
full Maxwell equations
wave equationWelec Wmagn
τPloss
Welec
Wmagn
τPloss
electroquasistatics
Welec
Wm
agn
τPloss
magnetoquasistatics
Welec
Wmagn
τPloss

56
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rMagnetoquasistatics (1)
• neglect displacement currents with respect to conducting currents– Ampère-Maxwell
• magnetic vector potential– conservation of magnetic flux
• electric scalar potential (voltage)– Faraday-Lenz
DH Jt
∂∇× = +
∂
rr r
0= +∇×rr
B A0B∇⋅ =r
B AEt t
∂ ∂∇× = − = −∇×
∂ ∂
rrr
Ar
φ
AEt
φ∂= − −∇
∂
rr
Welec
Wmagn
τPloss
57
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
r
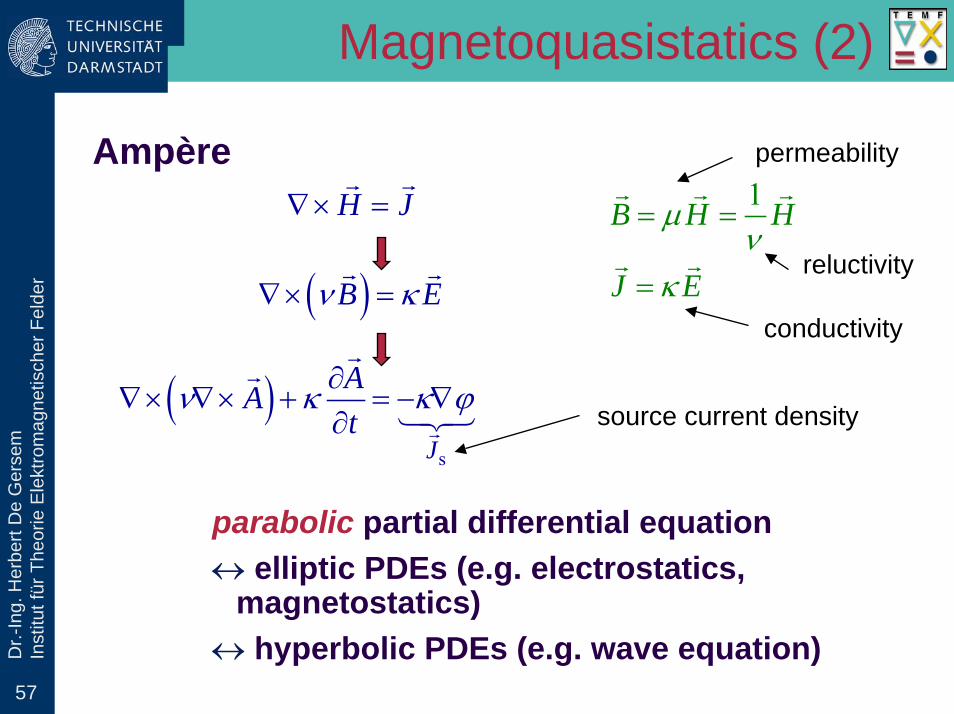
Ampère
parabolic partial differential equation↔ elliptic PDEs (e.g. electrostatics,
magnetostatics)↔ hyperbolic PDEs (e.g. wave equation)
H J∇× =r r
( )B Eν κ∇× =r r
( )s
∂∇× ∇× + = − ∇
∂ r
rr
123J
AAt
ν κ κ ϕ
1B H Hµν
= =r r r
J Eκ=r r
conductivity
permeability
reluctivity
Magnetoquasistatics (2)
source current density
58
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rOverview
• semi-analytical techniques (overview)• magnetic equivalent circuit• rotating-field theory• equivalent circuits + standard tests
• analytical model supported by field simulatione.g. reluctance machine
• magnetoquasistatic formulation• discretisation in space

59
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
r
• Weighted residual approach
• scalar product :
Spatial Discretisation (1)
Ωin
vectorial „weighting functions“vectorial „test functions“
( , , )iw x y zr
( ) sd dΩ Ω
⎛ ⎞∂∇ × ∇× + ⋅ Ω = ⋅ Ω⎜ ⎟∂⎝ ⎠
∫ ∫r r
rr r
i iJt
wA wAν κ ( , , )iw x y z∀r
( ) s∂
∇ × ∇× + =∂
rr r
JAt
Aν κ
( ),u v u v dΩ
= ⋅ Ω∫r r r r

60
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
r
• → weak formulation
( ) sd dΩ Ω
⎛ ⎞∂∇ × ∇× + ⋅ Ω = ⋅ Ω⎜ ⎟∂⎝ ⎠
∫ ∫r r
rr r
i iJt
wA wAν κ ( , , )iw x y z∀r
( ) sd dΩ Ω
⎛ ⎞∂∇ ⋅ ∇ × × + ∇× ⋅∇ × + ⋅ Ω = ⋅ Ω⎜ ⎟∂⎝ ⎠
∫ ∫r
r rr r rrri i i iw AA A w w wJ
tν ν κ
( ) ( )v w v w v w∇× ⋅ = ∇ ⋅ × + ⋅∇ ×r r r r r r
Gauss
only first derivative required„weak“ formulation
sd d d∂Ω Ω Ω
⎛ ⎞∂∇× × ⋅ Γ + ∇× ⋅∇ × + ⋅ Ω = ⋅ Ω⎜ ⎟∂⎝ ⎠
∫ ∫ ∫r r r r
rr r r r
i i i iw w w wA JtAAν ν κ
Hr
Spatial Discretisation (2)
61
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
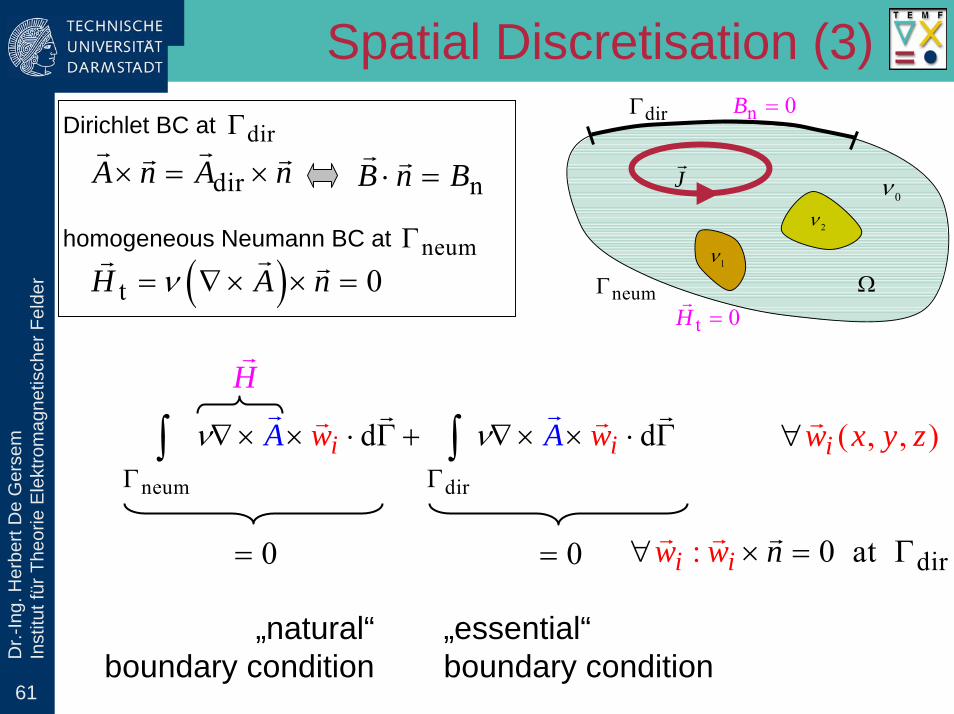
rSpatial Discretisation (3)
0ν
1ν
2ν
neumΓ
dirΓ
Ω
Jr
t 0H =r
n 0B =
dirA n A n× = ×r rr r
( )t 0H A nν= ∇× × =rr r
dirΓ
neumΓ
Dirichlet BC at
homogeneous Neumann BC at
nB n B⋅ =r r
0=
( , , )iw x y z∀r
0= dir0: ati iw w n∀ × = Γrr r
neum dir
d di iA wAwν νΓ Γ
∇× × ⋅ Γ + ∇× × ⋅ Γ∫ ∫r rrrr r
Hr
„natural“boundary condition
„essential“boundary condition
62
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
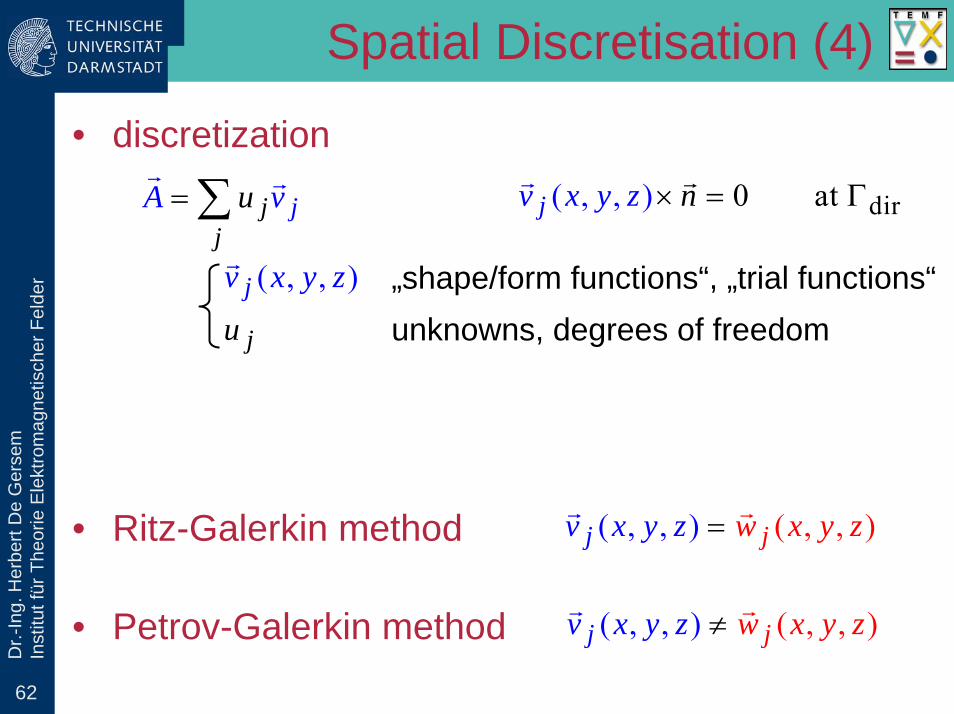
rSpatial Discretisation (4)
• discretization
• Ritz-Galerkin method
• Petrov-Galerkin method
= ∑r r
j jj
uA v
„shape/form functions“, „trial functions“
dir( , , 0 at)jv x y z n× = Γrr
( , , ) ( , , )j jw x y zv x y z =rr
( , , ) ( , , )j jw x y zv x y z ≠rr
( , , )jv x y zr
unknowns, degrees of freedomju

63
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rSpatial Discretisation (5)
• nodal shape functions
• edge shape functions
( ), , =x y zϕ 11 ( , )Nu x y 2 2 ( , )+ Nu x y 3 3( , )+ Nu x y
( ) m n n mv x N N N N= ∇ − ∇r r
n
p
m km
n
nN∇
mN−∇
64
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
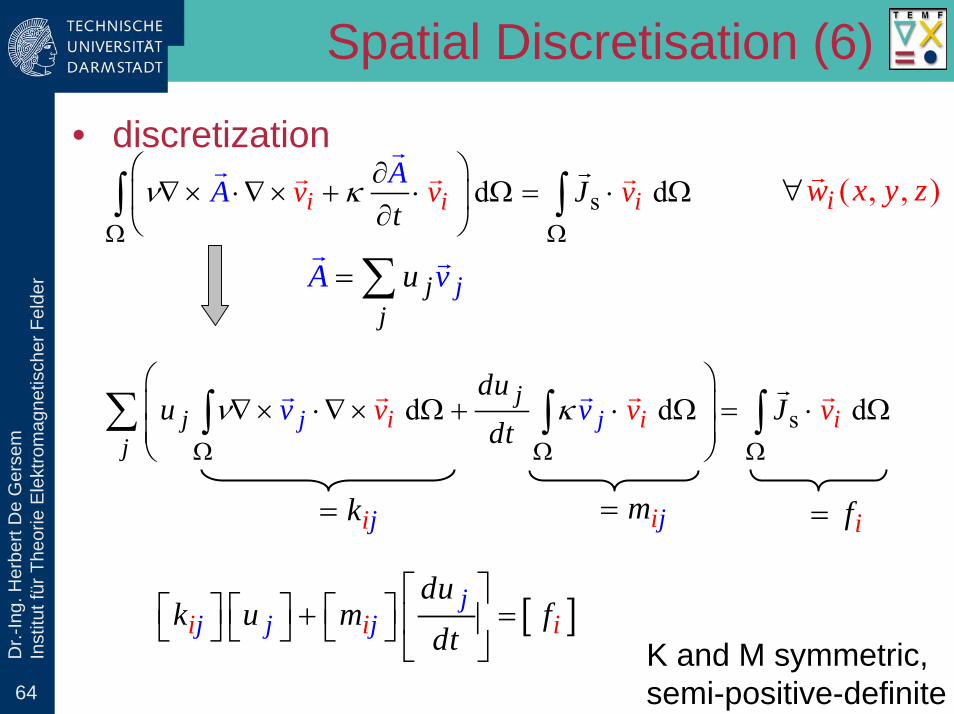
r
• discretization( , , )iw x y z∀
r
jik= if=
[ ]⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤+ =⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
⎣ ⎦j i
jji ij
duk u m f
dt K and M symmetric,semi-positive-definite
sd dΩ Ω
⎛ ⎞∂∇ × ⋅∇ × + ⋅ Ω = ⋅ Ω⎜ ⎟∂⎝ ⎠
∫ ∫r r
rr rr
i i iv v vAtA Jν κ
jj
jA vu= ∑r r
sd d dΩ Ω Ω
⎛ ⎞⎜ ⎟∇ × ⋅∇ × Ω + ⋅ Ω = ⋅ Ω⎜ ⎟⎝ ⎠
∑ ∫ ∫ ∫r r rr r ri ij j i
jj
j
dv v vv v
uu J
dtν κ
jim=
Spatial Discretisation (6)

65
Dr.-
Ing.
Her
bert
De
Ger
sem
Inst
itut f
ür T
heor
ie E
lekt
rom
agne
tisch
er F
elde
rSpatial Discretisation (7)
sd d dΩ Ω Ω
⎛ ⎞⎜ ⎟∇ × ⋅∇ × Ω + ⋅ Ω = ⋅ Ω⎜ ⎟⎝ ⎠
∑ ∫ ∫ ∫r r rr r ri ij j i
jj
j
dv v vv v
uu J
dtν κ
∇× = ∑r rj qqj
qcv z
sd d dΩ Ω Ω
⎛ ⎞⎜ ⎟⋅ Ω + ⋅ Ω = ⋅ Ω⎜ ⎟⎝ ⎠
∑ ∑∑ ∫ ∫ ∫r r rr rr
p i iq jj
j ip jqj p q
z vdu
z v vu c c Jdt
ν κ
m
n
p
FE, ,p qνM FE
, ,i jκM s,))
ij)
ja
FE FE+ =) )))% s
ddtν κaCM Ca M j
Technische Universität Darmstadt, Fachbereich Elektrotechnik und InformationstechnikSchloßgartenstr. 8, 64289 Darmstadt, Germany - URL: www.TEMF.de
Dr.-
Ing.
Her
bert
De
Ger
sem
In
stitu
t für
The
orie
Ele
ktro
mag
netis
cher
Fel
der
Lecture Series
Finite-Element Electrical Machine Simulation
http://www.ew.e-technik.tu-darmstadt.de/FOR575NEXT LECTURE : THURSDAY May 4th
Dr.-Ing. Herbert De Gersemsummer semester 2006
Institut für Theorie Elektromagnetischer Felder
Related Documents











