UELA POLITÉCNICA NACIONAL Facultad de lería Eléc Fernanda Hlonso Uaca Tesis previa a la obtención del Título de Quito 1991 EFN

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

U E L A P O L I T É C N I C AN A C I O N A L
Facultad delería Eléc
Fernanda Hlonso Uaca
Tesis previa a la obtención del Título de
Quito
1991
EFN

CERTIFICADO
Certijlco que la preservteTesis ha sido realizada en,
su totalidad por elVaca
larca Barragán
Director cíe Tesis
i
EPN

Dedicatoria
A mis padres y hermanos
EPN

T
Mi permanente gratitud hacia el Ingeniero Marco Barragán,por su invalorable dirección y ayuda, la misma que mepermitió concluir con este trabajo, y con ello laculminación de mi carrera universitaria.
EPN

INTRODUCCIÓN
En la actualidad existen muchas técnicas para el
análisis y diseño de sistemas de control. Generalmente se
las suele dividir en técnicas " clásicas " y técnicas
" modernas ". Las llamadas técnicas clásicas involucran el
uso de la Transformada de LA PLACE, según se trate de
sistemas continuos o discretos. En lo denominado como
técnicas modernas de análisis y diseño, se utilizan la
descripción temporal en variables de estado, por ejemplo
Realimentación de Estado, Estimación de Estado y
Alimentación Directa con propósitos y objetivos claros.
Este trabajo de Tesis tiene como objetivo la
utilización y aplicación de estos conceptos modernos
Este tipo de aplicaciones es utilizado en sistemas de
múltiple entrada y múltiple salida, este tema se limitará a
resolver como un caso de una sola entrada y una sola
salida.
(El problema a resolverse es, el Péndulo Invertido
sistemáticamente inestable, se obtiene el modelo
matemático; el mismo que se transformará a variables de
''estado, para propósitos de control y utilizando
Realimentación de Estado?: reubicar los polos del sistema en
posiciones adecuadas, y lograr una respuesta dentro de
ciertas especificaciones, lo que permitirá un correcto
control de posición del Péndulo Invertido, es decir se
consigue eliminar el error de posición.
El paso siguiente consistirá en Estimar los estados
del sistema, a través de un Estimador y re alimentar a la
entrada los valores del vector de estado estimado a través
de un bloque de ganancias a determinar. El sistema que se
obtiene al finalizar esta etapa de diseño se denomina
Regulador, el objetivo de este último es minimizar el
efecto de las perturbaciones en el sistema.
Para controlar la posición de este sistema es
necesario construir un servomecanismo de posición.
Todo este proceso de análisis y diseño de trata del
modo siguiente en ésta tesis.

En el primer capitulo se recopila el material
necesario como son las definiciones que serán de útil
provecho para el desarrollo de los posteriores capítulos.
Además se hace la presentación del problema a resolverse.
En el segundo capítulo se explica todo lo referente
al problema matemático de la Realimentación y Estimación
de Estado; es la teoría bajo la cual nos apoyaremos para
desarrollar los siguientes capítulos.
En el tercer capítulo se realizan los cálculos
necesarios particularizando la teoría del capítulo II, al
problema en estudio, obtenemos las ecuaciones matemáticas
(modelo matemático del problema) como también la transformación
a variables de estado, y la correcta aplicación de la
Realimentación y Estimación de estado. Posteriormente nos
veremos en la necesidad de crear un servomecanismo de
control de posición" y los elementos que se necesitan para
este fin.
En el cuarto capítulo, se obtienen los resultados
del diseño, las características y bondades del mismo, se
detalla con ayuda de gráficos y valores experimentales de
nuestro diseño.
Por último las conclusiones a la que se llega luego
de un trabajo de esta naturaleza, las aplicaciones y el uso
que se le puede dar a esta tesis.

CAPITULO I
Características de (os Sistemas de Control
1 .1 Introducción p. 01
1 .2 Definiciones p. 02
1.2.1 Planta p, 021.2.2 Sistema p. 021.2.3 Control por realimentación p. 041.2.4 Sistema de control realimentado p, 041.2.5 Tipos de bucle p. 05
1.2.5,a Bucle abierto p. 051.2.5,b Bucle cerrado p. 06
1 .3 Descripción de los sistemas usando variables de estado p, 07
1.3.1 Estado p, o?1.3.2 Vector de Estado p. os1.3.3 Espacio de Estado p. o91.3.4 Trayectoria de Estado p. o9
1 . 4 Método de variables físicas para las selección de variablesde estado p. 09
1.4.1 Ecuación de Estado p. 1 2
1 . 5 Diagramas de Simulación p. 1 5
1 . 6 Matrices y Raíces características p. 1 9
1 . 7 Resolución de la Ecuación de Estado p. 21
1.8 Linealización P - 2 2
1 .9 Especificaciones del funcionamiento en el Dominio delTiempo p. 23
1.10 Estabilidad p. 29
1.10.1 Estabilidad Absoluta p. 31
1.10.1.a Criterio de Raíces de la Ecuacióncaracterística p. 31
1.10.2 Estabilidad Relativa p. 32
EPN

1.11 Análisis en el Plano de Estado p. 33
1.11.1 Método del Plano de Fase p. 331.11.2 Puntos singulares p. 351.11.2 Clasificación de los puntos singulares p. 35
1.12 Presentación del Problema p. 37
CAPITULO II
Realimentacíón y Estimación de Estado
2 .1 Determinación del Control por Realimentación de Estado. p. 39
2.1.1 Introducción - p. 39
2.1.2 Controlabilidad p. 45
2.1.3 Determinación de la Forma Canónica Controlable p. 50
2.1.3.a Obtención de la Forma Canónica Controlable p. 50
2.1.4 Obtención de la Forma Canónica Controlable por mediode un cambio de base. p. 53
2.1.5 Estudio de la Realimentación de Estado con Variables de p. 55Fase
2.1.6 Análisis de error en un Sistema con Realimentaciónde Estado. p. 65
2.1.6.a Teorema del Valor Final p. 65
2.1.7 Empleo de los coeficientes de error permanente p. 75
2 . 2 Estimación de Estado p. 83
2.2.1 Introducción p. 83
2.2.2 Observabilidad p. 87
2.2.3 Estimador de Estado p. 90
2.2.4 Estimador de Predicción p. 92
EFM

2.2.5 Sistema de Control con el Observador p. 94
2.2.6 El Problema del Regulador p. 97
2.2.7 Polos del Estimador de Estado p. 1 o o
CAPITULO III
Determinación de las Ecuaciones matemáticasde los Elementos del Sistema.
3 .1 Estudio de la Planta p. 1 03
3.1.1 Introducción p. 103
3.1.2 Análisis del Problema del Péndulo Invertido p. 104
3.1.2.a Obtención de la Ecuación Diferencial p. 1 04
3.1.2.3.1 Componentes del Sistema p. 1043.1.2.3.2 Formulación del Modelo Matemático p. 1053.1.2.3.3 Ecuación Diferencial que describe el
Modelo Matemático. p. 110
3.i.2.b Lineaiízación del Modelo Matemático p. 113
3.1.2.C Consideración para la Obtención del Modelo Mate-mático del Sistema. p. 114
3.i.2.d Descripción en el Espacio de Estado. p. 11 e
3.2 Controlabilidad p. 119
3 .3 Polos del Sistema en lazo abierto. p. 121
3.4 Matriz de Transformación a variables de fase p. 122
3 . 5 Análisis y/o diseño con Realimeníación de Estado p. 1 24
3.5.1 Punto de Equilibrio con la Realimentación de Estado p. 1 30
3 . 6 Observabilidad p. 131
3 . 7 Resumen de ecuaciones. p. 131
EFN

3 . 8 El Actuador p. 135
3.8.1 Introducción p. 1353.8.2 Función de transferencia de los Servos DC p. 136
3.8.2.a Motor p. 136
3.8.2.3.1 Ecuación Eléctrica p. 1363.8.2.3.2 Ecuación Dinámica p. 1373.8.2.3.3 F. de Transferencia real del Motor p. 140
3.8.2.b Tacómetro p. 142
3.8.3 Diseño del Amplificador de Potencia p 1 43
3.8.3.3 Introducción p. 1433.6.3.b Amplificador de Potencia p. 1443.8.3.C Seguidores de Emisor Complementarios p. 1453.8.3.d Seguidores de Emisor Clase AB Complementarios p. 1473.8.3.9 Seguidores de Emisor Complementarios emplean-
do circuitos Darlington. p. 1483.8.3.f Limitador de Corriente p. 150
3 . 9 Estudio del Actuador en Lazo Cerrado p. 1 51
3.9.1 Introducción p. 1513.9.2 Linealización del Actuador mediante el uso de la Realimen-
tación p. 1 52
3 . 1 0 Sensor de Posición p. 157
3 .11 Esquema Completo del Controíador p. 159
CAPITULO IV
Resultados Experimentales
4 .1 Características de la Planta p. 1 62
4.1.1 Valores y Unidades [ g/|, h, I ] p. 162
4.1.2 L.G. de las Raíces de la Planta p. 1634.1.3 Respuesta de Frecuencia p. 1 63
4.1.3.3 Diagrama de Bode (Magnitud y Fase) p. 1 64
EPN

4.1.4 Respuesta del sistema (y ( t ) ) p. 1644.1.4 Análisis en el Plano de Fase p. 165
4 . 2 Determinación de la Realimentación de Estado p. 1.68
4.2.1 Vector k de Reaümentación de Estado p. 168
4.2.1.a Función de Transieren. Equivalente Heq(s) p. 1694.2.1 .b Lugar Geom. de las rafees de la función de T.
con Realimentación de Estado. KG(s)Heq(s) p. 1 694.2.1-c Función de T. con Realimentación de Estado p. 170
en lazo cerrado
4.2.2 Respuesta de Frecuencia del Sistema con Real, de Estado p. 1764.2.3 Estados Inaccesibles p. 1774.2.4 Análisis en el Plano de Fase p. 1784.2.5 Error normalizado al obtener los valores de akí. p. 182
4 . 3 Error en Estado Estacionario p. i 83
4.3.1 Error de Posición y Constante de error de Posición p. 1 834.3.2 Error de Velocidad y Constante de error de velocidad p. 1 83
4 . 4 Determinación del Estimador de Estado p. 1 84
4.4.1 Matriz L del Estimador de Estado p. 1 864.4.2 Ecuaciones del Controlador y de la Planta p. 1 88
4 . 5 Características del Actuador p. 1 89
4.5.1 Circuito del Amplificador de Potencia p. 1894.5.1.a Resultados experimentales con el amplificador
de potencia de simetría complementaria p. 194
4.5.2 Función de Transferencia del Motor p. 1954.5.3 Función de Transferencia del Tacómetro p. i 964.5.4 Análisis del Actuador p. 1 97
4 . 6 Sensor de Posición p. 199
4.7 Circuito Electrónico del Sistema Péndulo Invertido p. 201
4.7.1 Estimador de Estado p. 2014.7.2 Vector de Reaümentación de Estado p. 2054.7.3 Actuador p. 2064.7.4 Ecuación x= y 4- le p. 2064.7.5 Circuito general de control del Péndulo Invertido p. 207
4. 8 Características dinámicas de los elementos electrónicosutilizados en el diseño p. 208
4.8.1 Amplificadores Operacionales p. 2084.8.2 Transistores de Potencia p. 208
EPN

4 . 9 Circuitos impresos del Diseño p. 209
4.9.1 Estimador de Estado p. 2094.9.2 Vector de Realimentación de Estado p. 2094.9.3 Actuador p. 209
4 . 1 0 Conclusiones p. 210
EPN

Características cíe los sistemas de Control
EPN

CAPITULO I
Características de los Sistemas de Control
1.1 INTRODUCCIÓN
El control ha jugado un papel vital en el avance de
la ingeniería y de la ciencia. Su intervención ha
facilitado cada vez más nuestra vida diaria; por ejemplo,
los simples controles que hacen funcionar un tostador
automático hasta los complicados sistemas de control en la
comunicación por teléfono.
Los objetivos de la ingeniería son: el conocimiento
y control de los materiales y fuerzas de la naturaleza.
Esto obliga al ingeniero a un permanente estudio de los
diferentes sistemas, y para controlarlos, estos sistemas
deben ser conocidos y modelados.
El control de un proceso industrial consiste en
mantener ciertas variables lo más constantes posibles, o
dentro de ciertos límites; estos pueden ser, por ejemplo:
presión, temperaturas, caudal, producción, etc.
Cuando por efecto de las perturbaciones las
variables se apartan del valor deseado, se actúa sobre el
elemento o elementos que generan la variable, de modo que
ésta tienda a volver al valor deseado. La acción puede ser
continua ( aumentar/ disminuir, normalmente analógica /o discreta ) .
Entonces, el desafío presente a los ingenieros de
control es el modelado y control de estos sistemas
ínterreíaciónados modernos y complejos, donde la cualidad
más importante es la de controlar todo tipo de máquinas y
procesos industriales
La ingeniería de control se basa en los fundamentos
de la teoría de retroalimentación y el análisis de sistemas
lineales. Para entender cual es el lenguaje de la teoría
de control, es necesario definir en forma breve cierta
terminología, la misma que será usada más adelante,
conforme se vaya desarrollando esta tesis.
EPN

* 1.2 DEFINICIONES
1.2 . 1 PLANTAS
Una planta es un equipo, quizá simplemente un juego
de piezas de una máquina funcionando juntas, cuyos objetivo
es realizar una operación determinada. Se designa como una
planta a cualquier objeto físico que ha se ser controlado(como un horno de calentamiento, un reactor químico, péndulo
invertido o un vehículo espacial ).
1.2.2 SISTEMAS
; Un sistema es una combinación de componentes que
actúan conjuntamente y cumplen determinado objetivo. Un
sistema no está limitado a los objetivos físicos . El
concepto de sistema puede ser aplicado a fenómenos
b, obstractos y dinámicos/ como los de economía.
Los sistemas se pueden clasificar de acuerdo a la
naturaleza del problema en estudio, estos son;
a.- Parámetros localizados / Parámetros distribuidosb.- Determinístico / Estocásticoc.- Lineal / No lineal
d.- Parámetros fijos / Parámetros variables
e.- Continuo / Discreto
Parámetros Localizados.- Los parámetros del sistema son
constantes, o variables sólo respecto al tiempo.
Parámetros distribuidos.- los valores de los parámetros
del sistema, dependen de su situación. En un punto
dado podrán ser constantes o variables respecto
al tiempo. Debido a esta doble dependencia espa-
|i cial / temporal deben emplearse derivadas parciales,
i Procesos típicos que no pueden ser reducidos a
modelos de parámetros localizados son los térmicos y
los fenómenos de difusión.
EPN

Deterministicos.- Se entiende por tal un sistema cuyas
variables de entrada o salida están completamente
determinadas en el tiempo y por ello pueden
expresarse como un función del mismo ( U = f (t) ) .
Estocásticos . - Sistema en el que las variables no
pueden expresarse como funciones temporales, sino
como variables aleatorias definidas por su función
de densidad de probabilidad. Es decir, el valor que
tendrán en un momento determinado no es predecible
con seguridad. ( u = f (t/n) )
Lineal.- Un sistema lineal, determinista, continuo y
de parámetros localizados viene descrito por
ecuaciones diferenciales lineales, los sistemas
lineales no tienen memoria.
No Lineal,- la no-linealidad puede ser debido a
varias causas: Relaciones cuadráticas, parabólicas,
existencia de histéresis, saturaciones, umbrales u
otros.
Parámetros fijos.- son constantes a lo largo del
tiempo.
Parámetros variables. - sus valores varían a lo largo
del tiempo.
Continuo.- las variables pueden conocerse para
cualquier valor del tiempo.
Discreto. - las variables solo se conocen o calculan en
unos intervalos de tiempo, normalmente periódicos.
Otro concepto es la estabilidad, exactitud y rapidez
de respuesta, son características que debe tener
todo sistema de control, para ello es necesario el
estudio de un sistema con realimentación.
EPN

1 . 2 . 3 CONTROL POR REALIMENTACiON
Control de realimentación es una operación que, en
presencia de perturbaciones, tiende a reducir la diferencia
entre "salida y la entrada de referencia de un sistema ( o un
estado deseado, arbitrariamente variable ) y que lo hace sobre
la base de esta diferencia. Aqui solamente se consideran
perturbaciones a las variaciones no previsibles ( es decir
las desconocidas de antemano) , pues para las que pueden ser
predichas o conocidas siempre se puede incluir una
compensación dentro del sis terna de modo que sean
innecesarias las mediciones (fig 1.3).
1.2 . 4 SISTEMAS DE CONTROL REALIMENTADO
Sistema de control realimentado es aquel que tiende
a mantener una relación preestablecida entre la salida y la
entrada de referencia, comparando ambas y utilizando la
diferencia como parámetros de control. Es de notar que•*
los sistemas de control realimentados no están limitados al
campo de la ingenieria sino que se los puede encontrar en
áreas ajenas a la misma. Por ejemplo, el organismo humano,
es un sistema de control realimentado extremadamente
complejo.
Podemos decir entonces que un sistema de control es
una interconexión de componentes que forman una
configuración del sistema, la cual proporcionará una
respuesta deseada del mismo sistema. La base para el
análisis de un sistema es el fundamento proporcionado por
la teoría de los sistemas lineales, la cual supone una
relación causa-efecto para los componentes de un sistema./
Estos dos conceptos son más claros, con el estudio
del bucle en lazo abierto y cerrado
E P N

1.2.5 TIPO DE BUCLE
1.2.5.a . BUCLE ABIERTO
Con este tipo de control no se tiene la certeza de
que la variable controlada tenga realmente el valor
deseado. Se emplea cuando las perturbaciones son poco
importantes/ o cuando no es posible medir económicamente la
variable controlada.
Por tanto, el componente o proceso que vaya a ser
controlado puede representarse mediante un bloque como se
muestra en la figura 1.1
Entrada Salida
Fig 1.1 Sistema de control
La relación entrada-salida representa la relación
causa-efecto del proceso la cual a su vez representa un
proceso de la señal de entrada para proporcionar una
variable de señal de salida. La fig 1.2 esquematiza un
sistema de control de red abierta que utiliza un regulador
con el objeto de obtener la respuesta deseada.
Respuesta — *-
deseada de
salida.
Regulador - — *- Proceso -. Salida
Fig 1.2 Sistema de control con red abierta.
EPN

1.2.5.b. BUCLE CERRADO
En contraste con un sistema de control con red
abierta, uno con red cerrada utiliza una medida adicional
de la salida real con el objeto de comparar ésta con la
respuesta deseada de salida. Normalmente se denomina
control predictivo. Consiste en medir ciertos parámetros o
pertur- baciones e introducir su compensación adecuada.
En la fig 1.3 se muestra un sistema de control simple
con retroalimentación en red cerrada.
5
B(s)
HCs) Estimador
1 Punió de consigna, valor deseado, referencia, " set-Point "
2 Error
3 Variable manipulada
4 Variable controlada
5 Variable medida
A(s) elemento de entrada
B(s) señal retroalimentada
C(s) variable controlada
E(s) señal actuante
G-j(s) elemento de control
62(5) elemento de sistema
H(s) elemento de reíroalimentación
R(s) señal de referencia
U(s) entrada de la perturbación
V(s) mando
Fig 1.3 Diagrama de bloque de un sistema de control con
retroalimentación de red cerrada.
EFN

1 .3 D E S C R I P C I Ó N DE S i S T E M R S U S R N D O U R R I R B L E S DE
E S T R D O .
No pretendemos aqui desarrollar un tratado del
control por variables de estado, lo que se ha hecho con la
extensión adecuada en diversas obras calificadas y especia-
lizadas .
La finalidad de este punto es presentar una visión
panorámica y por tanto simplificada y reducida, la esencia
y los puntos principales del control por medio de las
variables de estado, de modo que nos permita
famil iar izarnos con los conceptos y terminología
corrientemente utilizada en el desarrollo de esta tesis.
1.3.1. ESTADO
Se define como sigue: El estado de un sistema es una
estructura matemática conteniendo n variables; Xi (t) ,
X2 (t) , , Xj(t) , , Xn(t) cuyos valores iniciales
xi (t) y las entradas Uj (t) al sistema son suficientes
para definir de manera única la respuesta futura para to del
sistema. por esta razón a las variables Xj_ (t) , i= 1, , n,
se las llama de estado.
Hay un número mínimo de variables de estado
requeridas para representar de modo preciso al sistema.
Además, las variables de estado no necesitan ser cantidades
mesurables; pueden ser cantidades puramente matemáticas.
Las r entradas üi(t), 02 (t),....,Uj(t), ... .,Ur(t) se
suponen determinísticas, es decir tienen valores
específicos para todos los valores de tiempo t >to. la letra
U es la notación normalizada para la función de fuerzas de
entrada y se denomina variable de control.
Generalmente al tiempo inicial de arranque 1$, se le
toma como cero.
El estado de un sistema es la mínima información
necesaria, junto con el valor de la entrada, para predecirEFN

isu futura evolución. Esta información mínima no es única,
sino que puede darse de infinitas maneras. De hecho, sólo
unas pocas son interesantes, de entre las que cabe citar
los siguientes tipos de variables de estado:
De Fase.- son aquellas variables de estado que se
obtienen al considerar una variable del sistema
(normalmente la considerada como salida ) y sus n-1
derivadas.
Canónicas.- Existen dos tipos de representaciones
canónicas: La de Jordán y la primera forma canónica.
Fisicas.- cada variable de estado tiene un
significado físico específico.
La definición de estado de un sistema produce otras
adicionales que siguen:
1.3.2. VECTOR ESTADO
El conjunto de variables de estado Xj(t) representa
los elementos o componentes de un vector n dimensional X(t) ;
o sea :
X(t) =
Xl(t)
X2(t)
Xn(t)
X =
XlX2
Xn
(1.0)
De lo anteriomente indicado, cuando se especifican
todas las entradas Uj(t) a un sistema, el vector de estado
resultante determina de modo único el comportamiento del
sistema para cualquier t > t0.
EPN
1.3.3. ESPACIO DE ESTADO
Se define como un espacio n dimensional en el que
los componentes del vector estado representan sus ejes
ordenados.
1.3.4 TRAYECTORIA DE ESTADO
Es la trayectoria producida en el espacio de estado
por el vector X al cambiar en el trasncurso del tiempo. Al
espacio y trayectoria de estado, en el caso bidimensional
se les conoce como plano de fase y trayectoria de fase
respectivamente.
El primer paso al aplicar estas definiciones a un
sistema físico es el de seleccionar las variables del
sistema que han de representar el estado del mismo. No
existe modo único de hacer esta selección, pero se conocen
varias técnicas para expresar el estado de un sistema.
1.4 MÉTODO DE URRIRBLES FISICñS PRRfl LR SELECCIÓN DE
URRIRBLES DE ESTRDO.
La selección de variables de estado en el método de
variables físicas se basa en los elementos almacenadores de
energía del sistema. La tabla 1.1 muestra algunos elementos
comunes almacenadores de energía existentes en los sistemas
físicos, las ecuaciones energéticas correspondientes, y la
variable física que normalmente se asigna como variable
de estado.
EPN

1 O
ELEMENTO
Condensador
Inductor
Masa
Momento de inercia
Resorte
Compresibilidad
de un fluido.
Condensador de
fluidos.
Condensador
térmico
ENERGÍA
C
L L ¡ 2 / 2
M M v 2 / 2
J J w 2 / 2
K K x 2 / 2
V/KB VPL/2
C= Ap Ah 2 / 2
C C02 / 2
VARIABLE FÍSICA
Voltaje v
Corriente i
velocidad de v
traslación.
velocidad de
rotación.
w
desplazamiento x
Presión P I
altura h
Temperatura 0
Tabla 1.1
Cabe indicar que sólo se eligen variables fisicas
independientes como variables de estado, entendiéndose por
variables de estado independientes aquellas que no pueden
expresarse en función de las variables de estado asignadas.
Hay casos en que puede ser necesario identificar más
variables de estado que las procedentes de ecuaciones
energéticas.
Ejemplo 1.1
Consideremos el circuito serie R-L-C figura 1.4. Este
circuito contiene dos elementos almacénadores de energía,
la inductancia y el condensador. Según la tabla 1.1 se
identifican dos variables de estado: Xi= vc (voltaje del
condensador)
EPN

1 1
y X2= 1 (corriente de la inductancia ) , entonces se tendrán dos
ecuaciones de estado.
Figura 1.4
Para obtener la ecuación que contenga la derivada de
la corriente en el inductor, se escribe la ecuación de
malla. Para obtener una ecuación que contenga la derivada
del voltaje del condensador, se escribe la ecuación de
nodo. El número de ecuaciones de malla que deben plantearse
es igual al número de variables representando corrientes
de inductores. El número de ecuaciones de voltajes en
nodos debe ser igual al número de variables de estado que
representan voltajes de condensadores ( la mayoria de veces son
ecuaciones de nodo).
Es necesario determinar de estas ecuaciones, cuales
de las variables elegidas son independientes.
Para este ejemplo las ecuaciones de malla y de nodo
son respectivamente:
LX2 + RX2 + Xi = U
« X2
(1.1)
(1.2)
Ordenando estas ecuaciones
« 1/c
X2 = -1/L Xi - R/L X2 + 1/L U
( 1 - 3 )
( 1 . 4 )
EPN

1 2
Las ecuaciones (1 .3) y ( 1 . 4 ) r epresen tan las
ecuaciones de estado del sistema que contiene dos variables
de estado independientes . Nótese que son ecuaciones
diferenciales de primer orden y son dos (n=2) el número de
ecuaciones de estado necesarias para representar el
comportamiento futuro del sistema (ejemplol ) .
La siguiente definición se basa en el ejemplo
anterior:
1.4.1 ECUACIÓN DE ESTADO
Las ecuaciones de estado de un sistema forman un
conjunto de n ecuaciones diferenciales de primer orden,
siendo n el número de estado independientes.
Asi, para el ejemplo 1 las ecuaciones de estado
representadas por las ecuaciones (1.3) y ( 1 . 4 ) y expresadas
matricialmente quedarían de la siguiente manera:
¿i
X2
=
0 1/c
-Vi, -R/L X2+
0
1/L (1.5)
Escribiendo la ecuación ( 1 . 5 ) con una notación
matricial queda finalmente:
X = A X + B U (1.6)
la ecuación (1 . 6) describe completamente la
evolución del estado del sistema, que depende de su estado
actual x(t) y de la entrada U(t) que se le aplique, además
ecuación en la que:
EPN

1 3
¿2en general es un vectorcolumna n x 1
all a!2
a21 a22=
o Vc
-VL " R/ien general es una matrizn x n de coeficientes dela planta
en general es un vectorde estado n x 1
b = en general es una matrizde control n x 1
y, U en este caso es un vector de control unidimensional.
Resulta matemáticamente trivial considerar como
salida una variable de estado, las dos o una combinación
lineal de ambas ( voltaje del condensador, corriente en el
inductor )
Si la cantidad de salida y ( t ) del circuito R-L-C de
la figura 1.4 es el voltaje del condensador Vc, entonces:
Y í t ) = Vc = Xi
Asi la ecuación de salida en forma matricial del
sistema será.
y(t) = = 1 0X2
(1.7)
EFN

1 4
siendo
CT = [l O]
la matriz de observación, constante en nuestro caso,
y además es un vector fila 1 x n, en este caso 1x2.
y (t) en este ejemplo es un vector de salida
unidimensional.
Las ecuaciones ( 1 . 6 ) y ( 1 . 7 ) son un sistema de
entrada y salida únicas; estas notaciones se convierten
para sistemas de entrada y salidas múltiples ( r entradas y m
salidas ) , en :
X = A X + B U ' (1.8)
Y = C X ( 1 . 9 }
que reciben el nombre de ecuaciones de estado
en donde:
A es la matriz de la planta, tiene una dimensión
de n x n elementos de constantes, parámetros
o características físicas o dinámicas del
sistema.
B es una matriz de control de constantes de la
señal de entrada, tiene una dimensión de n x r,
C es una matriz de salida, dimensión m x n
U es un vector de control, o la matriz de
entradas del sistema, r dimensional
Y es un vector de salida, m - dimensional
X es un vector matriz de las variables de estado,
n - dimensional
EFN

.1 5
En general, las ecuaciones de estado de los sistemas
dinámicos consistirán en ecuaciones diferenciales lineales
de primer orden, en las que el tiempo es la variable
independiente.
1.5 DIRGRRMñS DE SIMULñCION.
Se usa muy a menudo diagramas funcionales de bloques
para representar las ecuaciones dinámicas de un sistema. La
simulación puede mostrar variables físicas que aparezcan
en el sistema o puede mostrar variables puramente
matemáticas que convengan.En cada caso la respuesta global
es la misma. El diagrama de simulación es similar al
utilizado para representar al sistema en un computador
analógico. Los elementos básicos utilizados son
integradores ideales, amplificadores y sumadores también
ideales, como indica la figura 1.5. Pueden emplearse
elementos adicio- nales como amplificadores y divisores
para sistemas no lineales.
Uno de los métodos empleados para obtener un
diagrama de simulación incluye los pasos siguientes:
COWDlOIOKJ IMicif tV. C.I , X.o
-L
Integrador dt
a integración
Amplificador X]_ X2 = K
b Multiplicación por una constante
Flg.1.5
EFN

1 6
Sumador Xi t { ^ -, *4 = xl + X3 ~ X2
c suma
Fíg.1.5 Operaciones matemáticas efectuadas por una computadora analógica.
1.- Partir de la ecuación diferencial.
2. - Póngase en el primer miembro de la ecuación
la derivada de mayor orden de la derivada
dependiente. Puede aparecer en la ecuación
derivadas de la entrada, en este caso
también se sitúa la derivada de la entrada
que tenga el mayor orden, en el primer
miembro de la ecuación. Todos los demás
términos se pondrán en el segundo miembro.
3 . - Empiécese el diagrama suponiendo que la
señal representada por los términos del
primer miembro de la ecuación, sea asequible
o esté disponible. Entonces integrece tantas
veces como sea necesario para obtener
todas las derivadas de ordenes inferiores.
Puede que sea necesario añadir un sumador en
el diagrama para obtener explícitamente la
variable dependiente.
4.- Complétece el diagrama con bucles de reali-
mentación desde las salidas apropiadas
de los integradores a un sumador para gene-
rar la señal original del paso 2. Incluyase, si
es necesario, la función de entrada.
EPN

1 7
Conformando con el ejemplo 1.1,dibújese el diagrama
de simulación del circuito serie R-L-C de la fig 1.6 en el
que la salida es el voltaje del condensador.
Fig 1.6
VI + Vr + Ve = e
LDi + Ri + I/CD i = e
(1.10)
(1.11)
1.- cuando y = vc y U — c , la ecuación:
L C y + R C y + y = U
2.- se ordena de la forma y= bu - ay - by
donde a = R/c
b =
(1.12)
3 . - Se integra la señal y dos veces, como
indica la fig. (1.7.a)
4.- Se completa el diagrama como indica la fig,(l.V.b)
EFN

1 8
-y*- -y-
(b)
Fig 1.7 Diagramas de simulación de la Ec.1.12
A menudo se seleccionan las variables de estado como
las salidas de los integradores en el diagrama de
simulación. En este caso son Xi = Y y X2 = Xi = Y , las
ecuaciones de estado y de salida serán por tanto.
1
2 - 1/LC 1/LC
U
y el valor de Y:
EPN
1 9
y - i
1.6 MRTRICES Y RñiCES Cf iRRCTERÍSTICRS.
Un con jun to de ecuaciones algebraicas lineales
simultáneas puede representarse por la ecuación matricial.
Y = A X (1.13)
donde el vector Y puede considerarse como una
transformación del vector X . Surge la pregunta de si
puede o no suceder que un vector Y pueda ser múltiplo
escalar de X . Haciendo Y = X X donde
tenernos :
X X = AX •
X es un escalar,
(1.14)
Alternamente, la ecuación puede escribirse como:
X X - A X = ( X l - A ) X =0 (1.15)
donde I = matriz identidad. Por esto, la solución
para X existe si y solamente si :
det ( Xl - A ) = O (1.16)
Este determinante se conoce como determinante
característico de A . Desarrollando el determinante de la
ecuación (1 . 16) se obtiene la ecuación característica . Esta
ecuación es un polinomio de orden n en X. Las raíces n
de esta ecuación característica se conocen como las
raíces características o valores propios . Para cada valor
posible i ( i - 1,2, ...... , n ) de la ecuación característica
de orden n podemos escribir:
EFN

2 O
I "I - A ) X| = O
El vector X¡ es el vector característico para la
raíz o..
Ejemplo 1.3
Consideremos la matriz
A =
2 1 1
2 3 4
— 1 — 1 —9— J. ~_L "£.
(1.17)
Se encuentra cjue la ecuación característica es :
det
X-2 -1 -1
-2 X-3 -4
1 1 X+2
= ( XJ + 3 X + X-3 ) = O (1.18)
Las raíces de la ecuación característica son:
Cuando X - Xi = 1 encontramos el primer vector
característico por la ecuación:
A Xi = Xj^Xi (1.19)
y tenemos XTi — K 1, -1, O , donde K es una
constante arbitraria que generalmente se escoge como igual
a uno. En forma semejante, encontramos.
3, - (1.20)
EPN

2 1
1.7 RESOLUCIÓN DE Lfl ECURCÍON DE ESTflDO.
La ecuación homogénea de estado es:
X = AX (1.21)
La solución de esta ecuación puede obtenerse tomando
transformadas de LAPLACE
S X(s) - X(0) = AX (s)
Agrupando los términos que contengan X(s) resulta:
[ S I - A ] X (s) = X (0)
La matriz unidad I ha sido introducida de manera
que todos los términos de las ecuaciones sean matrices
apropiadas. Premultiplicando ambos miembros de la ecuación
por [ S i - A ] -1 obtenemos:
X (s) = [ S I - A] "I X (0) (1.22)
La tranformación inversa de Laplace produce
X (t) = £ -1 { [S I - A ] -1 } X (0) (1.23)
Comparando esta solución con X(t) - eat X(0) llegamos
a la siguiente expresión de la matriz de transición.
9 (t). = £ "1 { [ S I - A] -1 } (1.24)
La matriz resolvente se designa por 6 (s) y está
definida por:
0 (s) = [ S I • A ] -1 (1.25)
EPN

2 2
Cuando existe una entrada, la ecuación de estado"es;
X(s) = [ S l - A ] "I X(0) + [s I - A] ~! BU (s)
X{s)=9(s)X(0)+0(s)BU(s) (1.26)
1.8 LINEñLIZñCION
La linealización es la conversión de ecuaciones
diferenciales no lineales a lineales, para lo cual la
función lineal mediante el truncamiento de la serie después
de las primeras derivadas parciales, es decir, se
desprecian los términos posteriores.
Se supone que las variables se desvian poco dentro
de una condición de operación. Sea el sistema cuya entrada
es X(t) y cuya salida esy(t), la relación entre y(t) y X(t)
está dada por:
y(t) = f (x) (1.27)
Si la condición normal de operación corresponde a X
y Y entonces y = f (x) es desarrollada en serie de Taylor
alrededor de los valores medios de operación o de régimen
permanente ( son representados por una línea o barra
colocada sobre la variable )
De este modo, y ante un caso general de una sola
variable, tal corno puede verse en la figura 1.8
y = f (x) . función original no lineal
y = f(x) + df ( X - X)/cbc + 1/2! <*2f (X-X) 2 /$¿2+ series
(1.28)
Fig. 1.8
EPN

2 3
donde las derivadas son evaluadas en X « X si X - X es
pequeña, se pueden despreciar los términos de orden
superior en X- X. Entonces la función puede ser escrita
como:
y - y + K (X-X )
donde y - f (x)
función lineal
K = df / (1.29)
X = X
y = y + K (X-X ) que indica que y - y es proporcional
a x - x , la ecuación y - y - K (X-X ) da un modelo matemático
lineal del sistema no lineal dado por la ecuación 1.27.
1.9 E S P E C I F I C R C I O N E S DEL FUNCIONRMIENTO EN EL DOMINIO
DEL TIEMPO
Las especificaciones del funcionamiento en el
dominio del tiempo son Índices importantes pues los
sistemas de control son inherentemente sistemas en el
dominio del tiempo. Es decir el estado transitorio del
sistema o el funcionamiento con respecto al tiempo es la
respuesta de principal interés para los sistemas de
control.
Las señales estándar de entrada de prueba
utilizadas, comúnmente son: ver fig 1.9.
a) Escalón b) Rampa
Fig. 1.9 Señales estándar
EPN
c) Parábola

2 4
Señal de Prueba r ( t ) R ( s )
AESCALOS) r(t) = A, t> O R(s) = •—
- O, t< O S
ARAMPA r ( t ) - At, t>0 R(s) =
« O, t<0 S2
2APARABÓLICA r ( t ) = A t 2 , t>0 R(s) =
= O, t<0 S3
TABLA 1.2 .- Señales estándar
Estas señales estándar de prueba son representadas
de la forma general:
r(t) = t n (1.30)
y la transformada de LAPLACE es :
n!R(s) = • (1.31)
S n+1
Inicialmente, consideremos un sistema de segundo
orden de red simple y determinemos su respuesta a una
entrada escalón. La salida de la red cerrada es:
G(s)C(s) = • R(s)
1 -f G(s)
EPN

2 5
K 1C(s) = R(s) si R(s) = — {Entrada Escalón)
S2 + pS + K S
con2
C ( s ) «• (1 .32)S ( S2 + 2£con S + con2 )
para lo cual la salida transitoria, obtenida según
la transformada de LAPLACE.
c( t ) = 1 - e sen (wnpt + 9 ) (1.33)
P
donde:
£ = relación de amortiguación sin dimensiones
con = frecuencia natural del sistema
P = 1 - C 2
9 = tan -1 /
La respuesta transitoria de ese sistema de segundo
orden para diferentes valores de la relación de
amortiguamiento £ , se muestran en la figura 1.10 y 1.11.
A medida que £ disminuye, las raices de la red
cerrada se aproximan al eje imaginario y la respuesta se
vuelve cada' vez más oscilatoria.
Las medidas estándar de funcionamiento generalmente
se definen en términos de la respuesta de escalón de un
sistema, como se muestra en la figura 1.12.
EPN

26
Fig: 1.10 Respuesta transitoria de un sistema de segundo orden
SÍ la ecuación 1 .34 la descomponemos
S ( 32 + 2£a>n S + con2 ) = 0 (1.34)
tenemos:
- O
S2 = -
S2 = - C0 V C2 -
pudiéndose dar los siguientes casos:
2TT
1TTwn
Sistema sin amortiguamiento £= O
EPN

2 7
Sistema subamortiguamiento £ < 1
Sistema con amortiguamiento ^=
Sistema sobreamortiguamiento £ > 1
Fig 1.11 Respuesta indicial de sistemas de 22 orden.
EPN

2 8
La rapidez de la respuesta se mide por el tiempo de
ascenso ( 10-90% ) Tr, y el tiempo del Pico Tp . La
semejanza con que la respuesta real iguala a la entrada de
escalón se mide mediante el s obren i ve 1 porcentual y el
tiempo de estabilización Ts . El sobrenivel porcentual S.P se
define como :
Mpt-1SP= 100% =100 e
1(1.35)
donde : Mp es el valor pico de la respuesta del
tiempo :
Mp= 1+e (1.36)
EL tiempo de estabilización Ts, se define como el
tiempo necesario para que el sistema se estabilice dentro
de un cierto porcentaje 8 de la amplitud de entrada.
Para el sistema de segundo orden con una entrada de
amortiguación £co de red cerrada, la respuesta se mantiene
dentro del 2% después de cuatro veces la constante de
tiempo, o sea:
0-37)
EPN

2 9
c(¿)
ML
1,00,9
0,1
Sobrenivelporcentual
Tiempo delpico
Tiempo deestabilización
Tiempo
Fig 1.12 Respuesta de Escalón de un sistema de Control
1.10 ESTñBILIDRD
Una de las primeras cosas que el ingeniero de
control comprende es si el sistema que se le da, o el que
ha diseñado, es o no estable.
Se entiende por estabilidad la capacidad que tiene
el sistema para amortiguar con el tiempo y anular
totalmente las oscilaciones de la respuesta ante una
perturbación.
Podemos considerar dos tipos de estabilidad:
absoluta y relativa.La estabilidad de la respuesta correspondiente a un
sistema puede determinarse de la situación de los polos de
la función F(s) en el plano S. Las posibles posiciones de
los polos se muestran en la figura 1.13 y las respuestas se
dan en la tabla 1.3. Estos polos son las raices de la
ecuación característica.
EPN

3 O
I
Fig 1.13 Situación de polos en el plano S
( Los números identifican los polos }.
Posición del Polo Forma de respuesta Características
1 Ae"3*3 - Amortiguamiento exponencial
2 - 2* Ae"absen (ct+ <[>) ' - Sinusoide amortiguada exponenciaimente
3 A - Constante
4 - 4* Asen (dt + $ )
5 Aeet
- Sinusoide de amplitud constante
- Incremento exponencial (inestable)
6 - 6 * Aeí* sen(gt + § ) - Sinusoide con incremento exponencial
(inestable)
TABLA 1.3 Relación entre la respuesta y posición de los polos
Los polos de la transformada de la respuesta de los
polos origen o sobre el eje imaginario que no están
producidos por la función de fuerzas producen una salida
continua. Estas salidas son indeseables en los sistemas de
control. Los polos en el semiplano S derecho producen
términos que crecen con el tiempo. Tal comportamiento
caracteriza a un sistema inestable; por tanto son
indeseables los polos en el semiplano S positivo.
EPN

3 1
1.10.1 ESTABILIDAD ABSOLUTA.
1.10.1.a CRITERIO DE RAICES DE LA ECUACIÓN
CARACTERÍSTICA.
El sistema de Control es estable si las raices del
denominador (ecuación caracteristica tiene partes reales
negativas) .
En efecto sea G (s) = Y(s) /D (s) la transmitancia del
lazo cerrado de control . La ecuación caracteristica es :
D(s) = ansn + an-i S"-l -f ..... + ao = O (1.38)
Si las raices son s-\, $2 ..... , sn la ecuación puede
expresarse
D(s) = an(S-Si) (S-S2) (S-S3) ---- (S-Sn) « O
D(s) - AeSlt 4- Be$2t -f- ..... + N eSn t (1.39)
Se llega a la misma conclusión considerando que la
respuesta impusional de la transmitancia G(s) es :
(1.40)A B N
[G(S)¡ = £-1 [ - + - + ..... + - . ] « AeSlí + Bes2t+ ..... + N eSnt
S-S-j. ^"^2 S~£>n
y que debe ser nula para que el sistema sea estable.
Para que la expresión se anule cuando el tiempo tiende
a infinito, es necesario que los valores reales S-\, 82,..., Sn,
sean negativos, ya que de este modo cada uno de los
sumandos tiende a cero y la curva de respuesta se anula,
Si las raices S-j, S2,..., Sn fueran positivas, cada uno de
los términos AeSlt + BeS2t + + N eSn t aumentarían con el
tiempo .
E P N

3 2
OTROS CRITERIOS DE ESTABILIDAD ABSOLUTA.
. Criterio de Routh
. Criterio de Hurwitz
. Criterio de Fracciones continuas
. Criterio de Bode
. Criterio de Nyquist
1.10.2 ESTABILIDAD RELATIVA
. Criterio de BodeSe consideran los términos: Margen de ganancia y Margen deFase(No es tema de esta tesis estudiarlos)
Además conocemos que la estabilidad está determinada
por la posición de los polos del sistema, en los sistemas
lineales descritos por variables de estado ( péndulo
invertido) viene determinada por los valores propios
(e igenva lues) , que son las raíces de la ecuación
característica (ver numeral 1.5).
[S I - A]= O (1.41)
Recordemos que la estabilidad de los sistemas lineales
sólo depende del sistema, no de la entrada aplicada ni de
las condiciones iniciales.
En resumen un sistema lineal es estable si todos los
valores propios tienen sus partes reales negativas, si por
lo menos uno de los valores propios tiene su parte real
positiva, el sistema es inestable. Esto comprende
fácilmente sin necesidad de probarlo rigurosamente: sí un
valor propio tiene la parte real positiva, la matriz de
transición e^t tendrá términos que tenderán a infinito al
aumentar el tiempo, y por lo tanto x(t) tenderá a infinito
(ver tabla 1.3)
EPN

3 3
1.11 flNfiLlSIS EN EL PLRNO DE FñSE.
Sea un sistema de segundo orden representado por la
siguiente ecuación diferencial :
X -f f ( X, X ) = O (1.42)
donde f ( X, X ) es o bien función lineal o alineal de X
y X se puede representar la solución temporal de este
sistema por un diagrama de x (t) en función de t. También se
la puede ilustrar trazando X(t) en función de X(t) utilizando
t como parámetro.
Si se toma X y X como las coordenadas de un plano, a
cada estado del sistema le corresponde un punto en este
plano. Al variar t ese punto describe una curva en el en el
plano X - x f indicando la historia del sistema.
Esta curva se denomina trayectoria.
La representación geométrica del comportamiento del
sistema en términos de trayectoria, se denomina
representación en el plano de fase de la dinámica del
sistema.
1 . 1 1 . 1 MÉTODO DEL PLANO DE FASE
Este método para obtener gráficamente la solución de
las dos ecuaciones diferenciales de primer orden :
, X2) (1.43)
- • = f2(Xl, X2) (1-44)dt
dt
EPN

3 4
donde fi (Xi, X2) , f2 (xl/ X2) son funciones lineales o
no lineales de las variables Xi, X2 respectivamente. Decimos
que las ecuaciones (1.43) y (1.44) son autónomas lo que
significa que la variable independiente t sólo aparece en la
forma de derivadas.
Asi, en un sistema autónomo, ni las fuerzas ni las
restricciones varian con el tiempo.
En el plano con coordenadas Xi y X2 rectangulares
se denomina plano de fase o plano de estado.
Muy frecuentemente las ecuaciones (1.43) y (1.44)
toman la forma siguiente (más simple) :
dt= X2
= f(Xi, X2) (1.45)dt
Si se define Xi - X, entonces X2 = X . El plano de
fase más común es el plano X- X .
Además el diagrama de plano de fase de un sistema
lineal independiente, es una familia de trayectoria que no
se cruzan que describe la respuesta del sistema a todas las
condiciones iniciales posibles.
EPN

3 5
1.11.2 PUNTOS SINGULARES
Se sabe que la solución de las ecuaciones ( 1 . 4 3 ) y
(1 .48) para una condición inicial dada, es única, siempre que
f l (Xi , X2) y f2(*l/ *2) en las ecuaciones (1.43) y ( 1 . 4 4 ) sean
analíticas. ( Una función es analítica en un punto dado si esposible obtener un desarrollo en serie de Taylor de la funciónalrededor del punto dado ) .
Este resultado único no se aplica a los puntos en
que simultáneamente f i ( X i , X2) = 0 y f2 (Xi , X2) = O . Esos
puntos se denominan puntos singulares, los mismos que son
puntos de equilibrio, cualquier otro punto en el plano de
fase se denomina punto ordinario.
1.11.3 CLASIFICACIÓN DE LOS PUNTOS SINGULARES
El diagrama de plano de fase de un sistema lineal
independiente, es una familia de trayectorias que no se
cruzan que describe la respuesta del sistema a todas las
condiciones iniciales posibles sea el caso de la ecuación
diferencial de segundo orden linealizada :
X + aX + b X = O (1.46.a)
La ubicación del punto singular en el plano X- X es
el origen. La naturaleza de la solución de la ecuación (1.50.a)
es determinada por las dos raíces X-¡ y \2 Y de la siguiente
ecuación característica .
= O (l.46.b)
EPN

3 6
se supone que a y b son constantes y b =£ O. Las
ubicaciones de X-j y Xa en plano complejo, determinan las
características del punto singular. Se puede "ver que se dan
los seis casos siguientes:
1.
2.
3.
4.
5.
6.
*1
Xl
X1
Xl
Xi
X1
y ^2
y ^2
y X2
y Xa
y X2
y Xa
son complejos conjugados y están en el semiplano izquierdo
son complejos conjugados y están en el semiplano derecho
son reales y están en el semiplano izquierdo
son reales y están en el semiplano derecho
son complejos conjugados y están sobre el eje jw
son reales y X-j está en el semiplano izquierdo y Xa en e'
semiplano derecho ( 1 . 4 7 )
De acuerdo a la naturaleza de las respuestas
correspondientes a cada caso, se clasifican los puntos
singulares en: de foco eslable, de foco inestable, de nodo estable, de nodo inestable,
central y silla de montar, respectivamente .
Los diagramas de plano de fase de cada uno de los
seis casos, aparecen en la figura 1.14 en que se indican los
puntos asociados.
•X-
Foco Estable
Foco inestab.
^ Nodo Estable
Modo inest,
Central
Silla demontar.
Fig. 1.14 Puntos singulares.
E P N
3 7
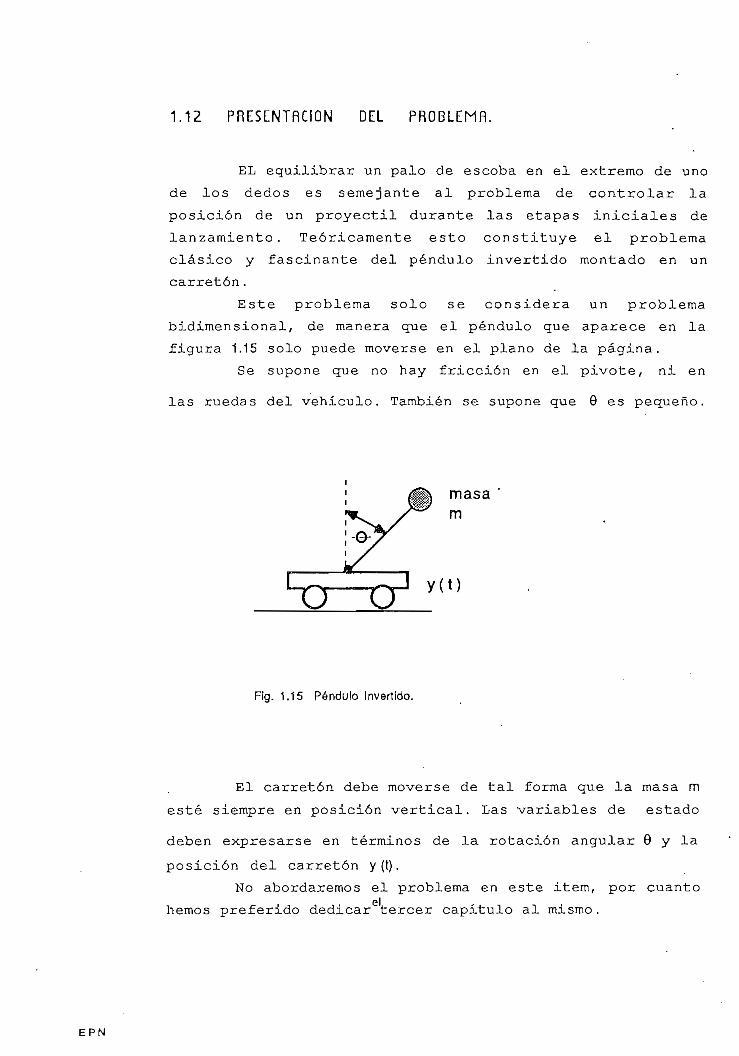
1.12 PRESENTñCION DEL PROBLEMF).
EL equilibrar un palo de escoba en el extremo de uno
de los dedos es semejante al problema de controlar la
posición de un proyectil durante las etapas iniciales de
lanzamiento. Teóricamente esto constituye el problema
clásico y fascinante del péndulo invertido montado en un
carretón.
Este problema solo se considera un problema
bidimensional, de manera que el péndulo que aparece en la
figura 1.15 solo puede moverse en el plano de la página.
Se supone que no hay fricción en el pivote, ni en
las ruedas del vehiculo. También se supone que 0 es pequeño.
masam
lrr-QJ_y"
Fig. 1.15 Péndulo Invertido.
El carretón debe moverse de tal forma que la masa m
esté siempre en posición vertical. Las variables de estado
deben expresarse en términos de la rotación angular
posición del carretón y (t).
y la
No abordaremos el problema en este item, por cuantoelhemos preferido dedicar tercer capitulo al mismo.
EPN

Real imentación
y
Estimación cíe Estado
p
EFN

38
CAPITULO II
ReaMmentación y Estimación de Estado
Hay métodos que tratan de optimizar el comportamiento
del sistema mediante procedimientos convencionales, basados
en la mejora de la respuesta temporal en bucle cerrado,
diseñando compensadores en cascada o de realimentación,
partiendo del análisis de la función de transferencia en
bucle abierto, estos son: compensador por retraso de fase
en cascada, compensador de adelanto de fase en cascada,
compensador combinado de retraso y adelanto en cascada y
compensador por realimentación; esto contribuye a la
existencia de muchos algoritmos de control que
evidentemente dependen de las especificaciones que se hayan
establecido para el sistema deseado.
El objetivo de este capitulo es analizar las técnicas
de Realimentación y Estimación de Estado. Tenemos una
planta cuyo modelo matemático se encuentra disponible en
variables de estado con este modelo matemático y utilizando
Realimentación de Estado, s'e rehubicarán los polos de la
planta en posiciones adecuadas para lograr una respuesta
dentro de ciertas especificaciones. El método consiste
luego en Estimar los estados del sistema a través de un
Estimador y realimentar a la entrada los valores del vector
de estado - estimado a través de un bloque de ganancias.
El sistema que se obtiene al finalizar el proceso o
etapas de diseño se denominará REGULADOR cuyo objetivo será
minimizar el efecto de las perturbaciones en el sistema.
EPN

39
2.1 DETERMiNRCION DEL CONTROL POR RERLIMENTRCION. DE
E S T R D O .
2.1.1 INTRODUCCIÓN
En lo que a Realimentación de Estado se refiere se
suponen conocidas perfectamente todas las variables de
estado ( de no ser asi existen algunos métodos capaces de estimarlaspor ejs el filtro de KALMAN en el caso discreto o de KALMAN-BUCY enel continuo ) .
Este método dentro del problema de la regulación coge
al estado inicial X0 del sistema y lo lleva al estado final
Xf deseado (primera condición, el sistema debe ser controlable) .
Este Regulador genera las variables de mando U(t) que
se obtienen a partir de U(t) = - K X ( t ) , siendo K una matriz
de ganancias que sustituyendo en la ecuación ( 1 . 8 ) nos da
X = A X (t) - B K X (t) = ( A - B K ] X(t). Aquí puede observarse que
las características dinámicas del sistema están
determinadas por la posición de los valores propios de
[A-B K], si el sistema es controlable puede obtenerse
cualquier posición de los valores propios eligiendo K
convenientemente, técnica también conocida como control
nodal o por posicionamiento de los polos.
A las ventajas de la simplicidad y facilidad de este
diseño y de poder elegir casi completamente la posición de
los polos, se oponen el no poder posicionar los ceros, o
sea, no poder influir sobre la respuesta transitoria, la
dificultad de ajustar los parámetros en el sistema real.
Antes de hacer un estudio sobre la controlabilidad, el
sistema de control de bucle abierto de posición de la figura
2.1, va a ser utilizado para mostrar los efectos de la
Realimentación con variables de Estado.
Ejemplo 2.1
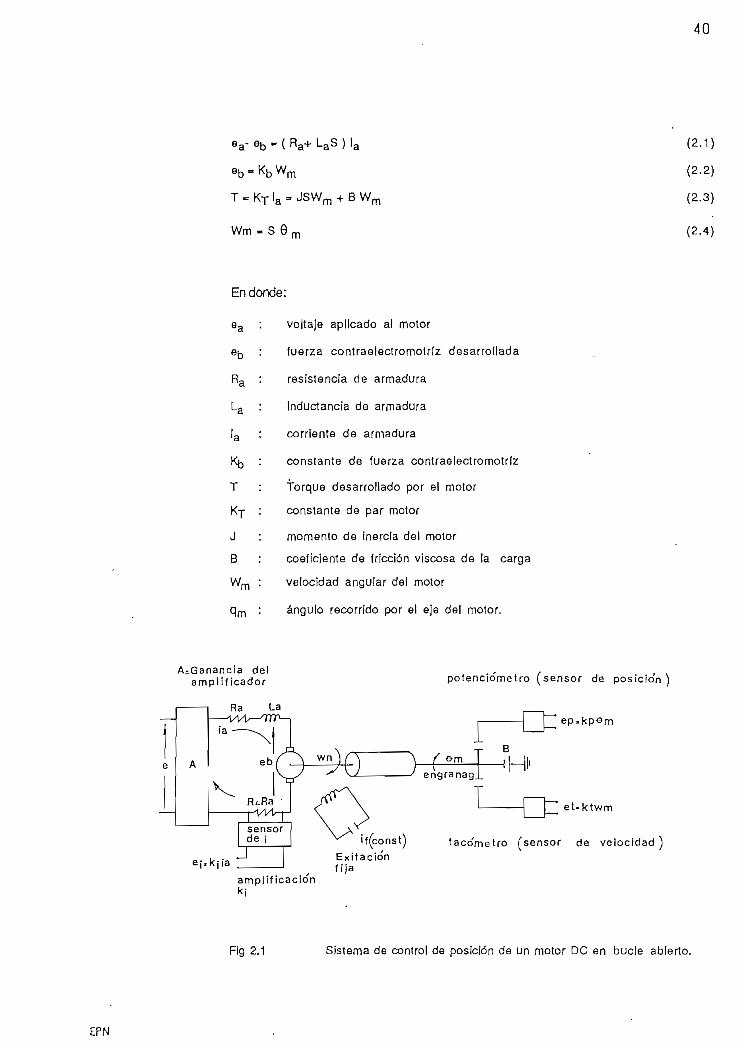
Las ecuaciones dinámicas del sistema de la fig. ( 2 . 1 )
son :
EPN
40
eb " ( Ra+ Las ) 'a
Wm - S 6 m
(2.1)
(2.2)
(2.3)
(2.4)
En donde:
ea : voltaje aplicado al motor
efc, : fuerza contraelectromotríz desarrollada
Ra : resistencia de armadura
La : Induciancia de armadura
Ia : corriente de armadura
Kfc : constante de fuerza contraelectromotríz
T : forque desarrollado por el motor
Kj : constante de par motor
J : momento de Inercia del motor
B : coeficiente de fricción viscosa de la carga
Wm : velocidad angular del motor
qm : ángulo recorrido por el eje del motor.
A;Gaam
A
lancia delpli f icador
Ra La
ía I
phf ") wn ](] )\ T ^< \a /V \1 \r \
de i V" iffconst)
_ . u. -_ ~J ExitaciónC|j KI la ,,._1 Ijcl
amplificaciónk¡
potencio'metro (sensor de posición
— ' pn U-n-S— , P-KP m
/ T B ,f em [ ii{ T ' I 'engranagj_
— ' ^t i,»....
taco'metro (sensor de velocidad )
Fig 2.1 Sistema de control de posición de un motor DC en bucle abierto.
EPN

41
Para obtener cantidades mesurables como estados del
sistema, se toman variables físicas.
Asi, las tres escogidas, que describen en forma total
el comportamiento del sistema son: la corriente que
circula por el motor ia^ su velocidad angular wm, así como
el ángulo que recorre Q^f que a la vez es la salida
deseada. Se tiene entonces:
K! -6 m=y (2.5)
X2 - Wm - *! (2.6)
X3 = la (2-7)
y, se hace la entrada
U = ea
La fig. 2.1 muestra que las tres variables son
accesibles, es decir, pueden ser medidas si se seleccionan
sensores adecuados, que produzcan voltajes proporcionales a
las variables de estado.
En la fig. 2.2.a tenemos un diagrama de bloques
representando un control de posición en bucle cerrado
usando el sistema de la fig. 2.1 . En este caso, cada uno de
los estados sirve como realimentación a través de
amplificadores cuyas ganancias son KI, K2 y K$, las mismas
que en general se denominan coeficientes de realimentación.
La suma de estas tres cantidades de realimentación es:
kl Xi + k2 X2 + k3 X3 = kTX (2.8)
siendo kT el vector de realimentación.
kx, k2, k3 coeficientes de realimentación (incluyen las
constantes del sensor)
En la fig. 2.2.a observamos claramente dos etapas del
sistema, el proceso en si y el controlador, que consta de
los amplificadores para cada estado y de un amplificador
adicional de ganancia K que contribuirá a dar las
características deseadas al sistema.
EPN

42
Por facilidad, tomaremos valores numéricos r los mismos
que se han escogido según se ve en la fig. 2.2.b.
Usando técnicas de manipulación de los diagramas
funcionales de bloques podemos simplificar la fig. 2.2.b
pasando a la forma que se indica en la fig. 2.2.c.
Con una posterior reducción conseguimos el diagrama de
la fig. 2.2.d, en donde observamos que la realimentación de
variables de estado es equivalente a insertar un
compensador o una función de realimentación H6q como un
sistema convencional, y añadir una ganacia K a la función
de transferencia G(s) del proceso de la planta del sistema.
Entonces, al pasar de la fig. 2.2.b a la fig. 2.2.d se
hace lo que se conoce como reducción a un Heq fig. 2.2.e.
La función de transferencia será:
Y(s) KG(s)
R(s) l+KG(s)Heq(s) (2.9)
de la figura 2.2.d se obtiene:
200G(s) « (2.10)
S (S2 + 6S + 25}
K3 S 2 + ( K3 + 2 K 2 ) S + 2 K1Heq(s) = (2.11)
EPN

43
Eb = Hb wb
= Wm
Planta o Proceso
Fig 2.2.a
Reemplazando valores en cada uno de los bloques,
tenemos la fig 2.2.b , asi por ejemplo:
S La +
100
S + 5 S J + B S + 1
Fig. 2.2.b
EPN

: ) -í 100
545
?
5f ; •;s
Fig. 2.2.C
200
S (S2 -f 6S + 25)
K3S2 + ( K3 + 2 K2 ) S + 2Ki
Fig 2.2.d
Fig 2.2.e
Con el fin de obtener las propiedades generales de
la realimentación por variables de estado y por la
facilidad
EPN
que presentan para tratar este tema, se usarán variables de
fase (definición numeral! .3, p.8), las variables de fase nos permiten
observar más claramente las características y propiedades
del sistema en estudio.
En el ejemplo 1,1 se presentó el uso de variables
físicas, existen diferentes formas de seleccionar variables
de estado, las mismas que son útiles para representar las
funciones de transferencia de sistemas, en el espacio de
estado, de una forma sistemática y relativamente fácil; se
las denomina formas canónicas, y son: forma canónica
observable, forma canónica de Jordán y, forma canónica
controlable, a esta última se le denomina como forma
canónica en " variables de fase " .
Una planta que va ser transformada a variables de
fase, es necesario que esta sea controlable; según el
teorema de Obtención de la forma canónica controlable (sección
2.1.3.2) por medio de un cambio de fase. Además se debe
comprobar que la planta tenga esta propiedad antes de
utilizar, en forma juiciosa y segura, cualquier técnica que
implique también el uso de funciones de transferencia.
De aquí que es importante el chequeo de la
controlabilidad de la planta para garantizar que los
resultados que se obtienen sean valederos.
2.1.2. CONTROLABILIDAD.
Sea el sistema de tiempo continuo:
X = AX + Bu (2.12)
Se dice que el sistema representado en variables de
estado es completamente controlable si, para cualquier to
puede transferirse cada estado inicial X(t0) a cualquier
EPN

estado final X ( t f ) en un tiempo finito, tf > to po*: medio
de un vector de entrada limitado U ( t ) .
Es decir, que por medio de unas entradas adecuadas
somos capaces, desde el exterior del sistema, de hacer
evolucionar todos y cada uno de sus estados internos hacia
unos valores finales. A veces se denominan sistemas
completamente controlables, para distinguirlos de los
parcialmente controlables, en los que sólo puede hacerse
evolucionar algunas variables de estado pero no todas.
Esta definición supone que U (t) es capaz de
afectar a cada variable de estado en:
i
X (t) = 6 (t-t0) X (t0) + J 9 (t- t } B U (T) dt (2.13.a)
En donde la ecuación (2.13.a) es la solución de la
ecuación (1.8), en la que 8(t-t0) es la matriz de transición
de estado, y se la escribe como 6 (t-to) =6A^t~to). (ver Capí,
numeral 1.7) tfJ e A t f c -X ( t ) = eAtt) X ( 0 ) + J e A ( t - T ) B U ( T ) dT (2.13.b)o
Esta matriz describe la respuesta libre (no forzada)
del sistema.
Por otro lado, el estado inicial X ( t0) es el
resultado de las entradas anteriores a t0. La determinación
de la controlabilidad se puede llevar a cabo mediante
varios métodos, pero se ha escogido el más simple que
consiste en lo siguiente:
Utilizando la ecuación (2.13.a) con t0 — O, definien-
do un vector de estado final X ( t f} = O , y aplicando la
definición de controlabilidad completa se tiene:
X ( 0 ) J eA ( t f -
EPN

multiplicando por e A ( t f ) y desarrollando queda:
X ( O ) = - J 6 'AT B U( 1 ) d t (2.14)o
Por el teorema de Cayley-Hamilton muestra que se
puede expresar e"A/í: como un polinomio de A de grado n-1
asi:
n-1e-AT „ S a V(T) AK
K-o K-
Llevando esta ecuación a la ecuación (2.14) resulta:
f n -i
X(0) = - J É a, (T) AK BU (T)dTO K=o
o bien:
n-i T
X{0) = - E J a,(T)AKBU (T)dT
que queda :/!./ f
X(0) = -E A ^ B J av(T)U(T)dT (2.15)-"-
La integral de la ecuación (2.15) puede evaluarse con
la entrada ü(t) de dimensión r, siendo el resultado:
Pk = J cck(t)U (T)d-r
en donde p k es r-dimesional, para K = 0,1, ,n-l.
La ecuación puede expresarse de la forma:
X(0)= -E\KB p k = - ( B p 0 + A B p 1 + .„+ AH-IB
desarrollando:
EPN

48
X(0) « [ B I AB I A2B I I A "'IB I]
Po '
Pl
Pn-1
(2.16)
De acuerdo con la definición de controlabilidad,
cada estado inicial Xj(0) debe estar influido por la
entrada U(t). esto requiere que:
Rango de [ B | AB I A2B I !An-1BI] = n
dím (n x nr)
(2.17)
En un sistema de entrada única, la matriz B se
reduce al vector b, y la ecuación (2.17) representa una
matriz n x n.
La forma canónica controlable es llamada asi porque
la matriz de contro labilidad de (2.17) para una sola entrada
y una sola salida, con las matrices A y b en esa forma
canónica, toma la forma:
0
0
0
0
1
0 .......
0
0
1
e1
1
61
Gn <ín-o
en-2
en-1
donde:
ek = "-i?0an-¡
EPN

49
para k= 1,2l...,In-1 1.
De aqui podemos observar que esta matriz de
dimensión n x n tendrá rango n solamente si el vector b
Matriz de rango n significa tener una matriz de n x n no singular, es decir
su determinante es no nulo, o tiene n vectores ( columna o fila ) linealmente
independientes si:
C1X1+C2X2 + .......... + CnXn = O
C-j ,02,03,. . . . , Cn son constantes
G! = C2= C3 ~ .... , = Cn = O
Inversamente, se dice que los vectores X-\, X2 son linealmente dependientes
si se puede expresar X ¡ como una combinación lineal de X j donde j = 1,2, , n para
j* i
X ¡ = £ Ct Xi
Ejemplo. py [X2] [X3] =
12
3
1
0
1
2
2
4
[ ] = 1(-2) - 1(2) + 2(2) = -2-2 + 4 = 0
det [ ] = O singular.
EPN

50
tiene la forma indicada en la ecuación (2.25.a), es decir que
tenga un uno como elemento de la última fila.
De todo ésto podemos concluir que si escogemos las
variables de estado de tal manera que se obtengan las
matrices A, B,C en la forma canónica controlable, observando
que la matriz B sea diferente de la matriz nula O.
2.1.3 DETERMINACIÓN DE LA FORMA CANÓNICA
CONTROLABLE.
O forma canónica en " variables de fase "
2.1.3.1 OBTENCIÓN DE LA FORMA CANÓNICA CONTROLABLE
A PARTIR DE LA FUNCIÓN DE TRANSFERENCIA.
En la teoría de control muy frecuentemente se
utilizan funciones denominadas «.funciones transferencia »,
para caracterizar las relaciones de entrada- salida de
sistemas lineales invariantes en el tiempo .
Función de transferencia o transmitancia es la
relación de cociente entre las expresiones matemáticas de
las variables de salida y de entrada en función del tiempo
o en función de la transformada de LAPLACEy se la representa
con el símbolo Y(s) / U(s)
Sea la función de transferencia:
Y(S) CnSn-1+ Cn^ Sn'2- = - +d (2.18)U(S) Sn + anSn'1 + .......... + a2S + z-\a función de transferencia puede también escribirse asi:
EPN

51
CnSn-1 + Cn.j Sn-2 + + c2S + Ct
Y(S) = d U(s) + , U(S) (2.19)
Sn + anSn-1 + ...+ a2S+a.|
Que en el dominio del tiempo y haciendo p =será:
Cnpn-1+ Cn_i Pn'2 + ...... + C2P + C-,Y(t) = d U(t) + _ , U(t) (2,20)
pn + anPn-1 + ...... .......... + a2P + at
La ecuación diferencial que describe la dinámica del
sistema, se traslada a una forma vectorial-matricial .
Si escogemos las variables de estado como sigue:
X2= X3
Xn = - a - t X - j - a2X2 -.....- anxn + U = (-ara2p -...."anpn
Entonces la salida y deberá estar especificada
precisamente como:
Y = dU- f ( CnPn-1+Cn_1pn"2 + + C2P + C1)X1 (2.21)
pero:
EPN
52
«X¡+1 U 1,2, ........ n-1
entonces:
y = d U + CnXn-1+Cn.1 (2.22)
En forma matricial:
XH1
X2
*3
xn-1
xn
v =
0 1 0 0
0 0 1 0
0 0 0 ....... 0
0 0 0 1
~3-i ~a2 ~a3 • ~ n
1
x
X2
X3
Xn-1
Xn
IX 4
4-
-di
0
0
0
0
1
J
!2 .23;
(2.24)
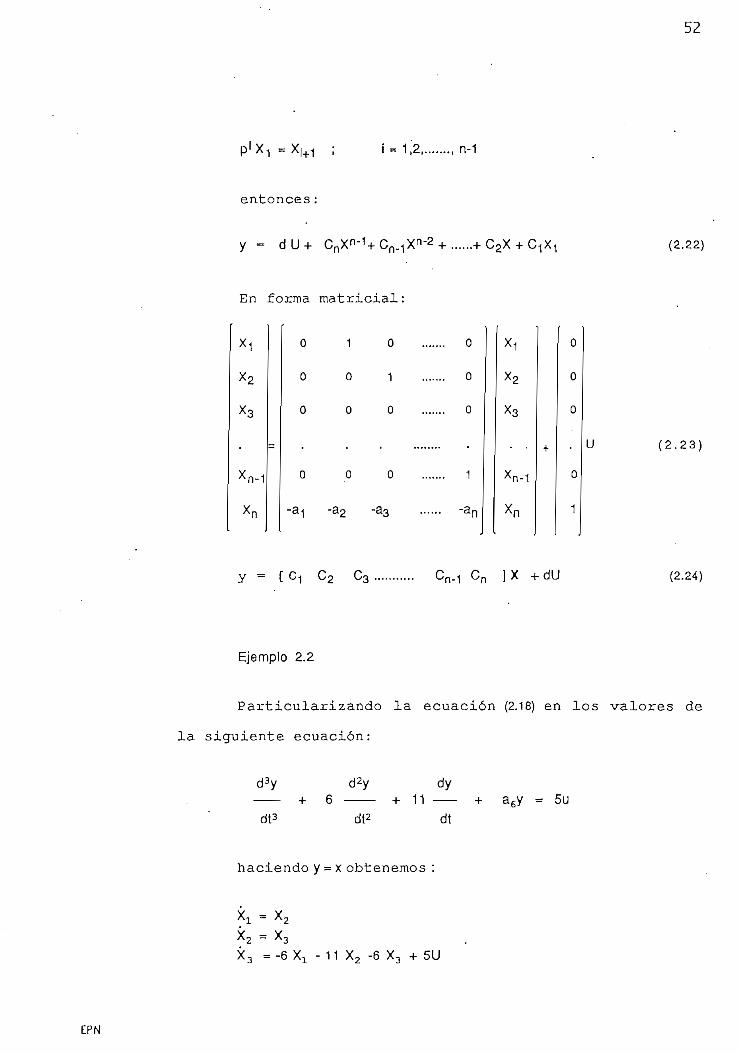
Ejemplo 2.2
Particularizando la ecuación (2.18) en los valores de
la siguiente ecuación:
d3y d2y dy+ 6 + 11 • -f a6y = 5u
dt3 dt
haciendo y = xobtenemos :
Y Y/•I - A2
X2 - X3
X3 = -6 X-L - 11 X2 -6 X3 + 5U
EPN

53
*iX2
X3
=
=
=
0 1 0
0 0 1
-6 - 11 -6
X!
*2
*3
+
0
0
5
El esquema de bloques es el de figura 2.3 que se halla a
continuación. A este esquema se le conoce a veces como la
segunda forma canónica.
y(0
-f
Fig. 2.3 Representación de la segunda forma canónica
2.1.4 OBTENCIÓN DE LA FORMA CANÓNICA CONTROLABLE
POR MEDIO DE UN CAMBIO DE BASE.'
T e o r e m a . - si un sistema n dimensional, lineal,
invariante en el tiempo y cuyas ecuaciones ( de estado y de salida)
tienen una sola entrada y una sola salida es controlable,
entonces este puede ser convertido mediante una
transformación de semejanza a la forma siguiente:
o 1 O
o o 1
O ,o O
~a3
(2.25.a)
EPN

•y = [O, C2 03 C^! Cn ] x f +dU (2.25.b)
donde a-L, a2, . . . . , an son los coeficientes del
polinomio característico de A y los c¿ para el valor
de ¡= 1,2 n son calculados a partir de las ecuaciones :
X = A X + bU (2,26.a)
Y = CTX + dU (2.26.b)
Decimos que las ecuaciones dinámicas ( 2.25 ) que
están en la forma canónica controlable.
La función de transferencia de (2.26) es:
Y(S) CnSn-1+ Cn_.j Sn-2 + ......+ C2S + G!
+ d ( 2.27)U(S) S n +a n S n - 1 +
La transformación de semejanza utilizada es:
X = P X f (2.28)
por lo tanto la representación canónica controlable
estará dada por:
Xf = Af Xf + bfU (2.29.a)
Y = (Cf}TX + dU (2.29.b)
Consecuentemente las matrices constantes de las
ecuaciones (2.29) están dadas por :
Af _ p-1 A p (2 .30 )
Bf = P -1 B (2 .31)
= CT P = [ G! C2 ..... Cn ]P (2.32)
EPN

55
En donde la matriz de t ransformación P se la
encuentra asi:
pn-1 - A P n + a n b
• n O ~ Ai n 1 ~f" 3nn-¿ n-i _ n
= A b + anb
= A2 b + anA b
P2 = AP3+a3b
P1 = AP2 + a2b
..... +a3b
entonces:
P - [ P l l P 2 IP3 I- i p n -1 l p n ) (2-33)
y el vector b debe ser tal que: P 1 . P 2 - P 3 -pn-l > pn
sean linealmente independientes y forman una base en el
espacio de estado del sistema.
2.1.5 ESTUDIO DE LA REALIMENTACION DE ESTADO CON
VARIABLES DE FASE.
La planta que consideramos es la de la figura 2.8, que
está descrita por variables de estado.
Entradaa la
Planta
Salida de laPlanta
Fig 2.8 Planta descrita por variables de estado
EPN

56
La entrada,, u que es única, está relacionada con el
vector X del sistema por la ecuación:
X = A X + bU (2.34.a)
y la salida de la planta está dada por:
Y = CTX (2.34.b)
Si A,b y CT están formuladas usando variables de
fase, según las ecuaciones (2.25) , entonces la función de
transferencia de la planta es la dada por la ecuación (2.27),
que se reescribe a continuación :
Y(S) CnSn-1+ Cn_-| Sn"2 + ......+ C2S + G! (2.35)
U(S) 'S n +a n S n - 1 + .......... +
En la realimentación de estado se asume que todo el
vector X es alcanzable para ser realimentado . El sistema
con realimentación se muestra en la figura 2.5, en la que
se toma la cantidad k^ X, se la resta de la entrada r del
sistema y se la amplifica K veces, obteniéndose de esta
forma la entrada U a la planta, que está dada por:
U = K ( r - kT X ) (2.36)
Entonces , la ecuación (2.34.a) tomará la forma :
X = A X + b K ( r - k T X )
Desarrollando :
X = [ A - b K kT ] X + b Kr (2.37.a)
donde
k"T = Vector de Realimentación
K = ganancia del sistema
EPN

57
Fig 2.5
y de la figura (2.5), nuevamente
y = C T X (2.37.b)
Comparando las ecuaciones (2.37) con las ecuaciones
(2.34) y (2.35) se ven que son semejantes con la siguiente
singularidad:
A — > [ A - b K kT ]
U > K r (2.38)
Si A y b están dadas en las variables de fase,
como en las ecuaciones (2.25) , entonces:
[ A - K b kT ]
0 1 0
0 0 1
0 0 0
-3-| -Sg "£3
0
0
1
..... -an
0
0
-K
0
1
k2..... kn]
(2.39.a)
Por simple cálculo se tiene:
EPN

O 1 O
o o o
A - K b kT ] - . (2.39.b)
O O 1
- (a-j + K k-j ) -( a2 + K k2) .... -( an + K kn)
A continuación reescribimos las ecuaciones (2.37) en
forma desarrollada:(2.40.a)
O 1 O O
O O O O
X = . . X + . Kr
o o 1 o
+ K k-! ) -( a2+ K k2) ...... -( an + K kn> 1
y = [C-! C2 ..... C n ] X (2.40.b)
Entonces, la función de transferencia puede ser
obtenida directamente, como vimos en la sección ( 2.1.3 ) y
observando (2.38), se tiene:
Y(S) CnSn-1+ Cn.-, Sn-2 + + C2S + G! (2.41)
KR(S) Sn + (an+K kn)Sn-1+ + (a2+K k2) S + (a1+K k-,)
de la ecuación (2.41) tenemos:
Y(S) K(CnSn'1+ Cn_-, Sn-2 + ......+ C2S + G!) (2,41)
R(S) Sn + (an+K kn)Sn"1-f + (a2+K k2) S + (a1+K k-,)
EPN

59
A partir de la función de transferencia de la
ecuación (2.41) podemos reescribir las ecuaciones de estado
directamente si se las toma como variables de fase ( forma
canónica controlable), obteniéndose los siguientes resultados:
X =
o
Kk2) -( an + K kn
(2.42.a)
y - K c2 ..... c n ] x (2.42.b)
Debemos anotar que el cambio entre las ecuaciones
(2.40) y (2,42) implica una redefinición de X1 y por tanto de
X2 .., Xn, que, implícitamente consiste en un cambio cié
escala, esta es la razón por lo que la matriz [ A - K b k' ]
no varia.
Por otro lado, es interesante obtener la función de
transferencia de la ecuación (2.41) de la siguiente forma:
Y(s)
R(s) UKG(s)H6q(s) (2,43)
Con esto podemos determinar el bloque de
realimentación, equivalente a la realimentación de estado,
en otras palabras Heq (s) . Usaremos el diagrama de bloques
de la figura (2.6) que representa, en general, un sistema con
realimantación de variables de estado, cuando dichas
variables están en la forma canónica controlable.
EPN

60
Usando técnicas de manipulación de diagramas de
bloques podemos simplificar la figura (2.6.a) pasando a la
forma indicada en la figura (2.6.b)
Haciendo una posterior reducción al diagrama de la
figura (2.6.b) conseguimos el de la figura (2.6.c).
Finalmente al desarrollar la figura (2.6.c) se
consigue llegar al diagrama de bloques de la figura (2.6.d) .
Fig. 2.6.a
EPN

C S
61
xn xn xn-í
n-1 Sn'2 + + a2S
KnSn'1+ Kn_-, Sn"2 + + K2S + K!
Figura 2.6.b
R +
-i-cnsn-1+ c^-, sn-2 +......+ C2s
an_-,
cnsn-1+
CnSn-1-í- Cn.-,
...... + cs + c
...... + C2S + C1
Figura 2.6.c
EPN

6Z
CnSn'1
Sn
..,...+ C2S + C1
an_.,
Kn,-,
n_-, ...... + cs + c-
G(s)
Heq(s)
Figura 2.6.d
Comparando la figura {2.6.d) con la figura (2.2.e) se ve
que la función de transferencia G(s)=Y(s)/\j(s) co r responde
efectivamente a la de la planta, ecuación (2.35.c), y que el
realimentar todos los estados del sistema equivale a
realimentar la salida Y a través de un bloque Heq{s) dado
por la ecuación (2.44).
n_-, ...... + K2S -f
CnSn"1+(2.44)
...... + CS + C-
Obtenemos entonces las siguientes conclusiones:
1 . -La ecuación (2.44) implica que cuando k = c se
tendrá realimentación unitaria : Hen(s) = 1
2.- El numerador de Hen(s) es un polinomio de grado
n-1, en s, o sea tiene n-1 ceros . Pueden seleccionarse
los valores de los coeficientes de este polinomio para
lograr el comportamiento deseado del sistema . Si se trata
de una planta polar, o sea, sin ceros, Heq(s) será sólo un
polinomio de grado n-1 .
3.- El numerador de G(s) es igual al denominador de
Heq(s) • £°r tanto la función de transferencia G (S) Heq(s) tiene
EPN

63
los mismos n polos que G(s) y tiene los mismos n-1 ceros de
Heq(s); estos ceros se determinan en el proceso de diseño .
4.-El diagrama del lugar de las raices basado en la
ecuación (2.45) revela:
K( KnSn'1-f Kp^ sn-2
K G(s)Heq(s) „ . (2.45)
S n +anSn-1 + an_., sn~
Que, para kn>0;
a) existe una única asíntota con ángulo y=-180°.
, n-1 ramas terminan en el eje real negativo en
s = - oo. La estabilidad del sistema se asegura para
los valores elevados de K si todos los ceros de
»-, Hgq(s) se sitúan en el semiplano izquierdo de s.
Mientras que para kn< 0;
b) existe una asíntota única con ángulo y = 0°, así
que el sistema resulta inestable para los valores
grandes de K.
5.- Se nota según la ecuación que el resultado de
la realimentación de estados a través o por medio de
elementos constantes es el de cambiar las posiciones de los
polos en lazo cerrado, dejando los ceros del sistema, si
los hay, iguales a los de G(s).
Podemos resumir el procedimiento para diseño :
^ a. - Transformar el sistema descrito en variables de
'- estado a variables de fase. Esto puede lograrse
EPN

64
mediante el proceso de tranformación descrito
en la sección 2.1.4.
b. - Suponer que todas las variables de estado son
accesibles.
c. - Encontrar el polinomio característico de Y(s)yp/s\n las especificaciones deseadas { Mp,tp, ts,
error en régimen permanente, especificados }, en donde:
Mp= máximo sobretlro, tp « tiempo pico y ts = tiempo de estabilización
EPN

65
2.1.6 ANÁLISIS DE ERROR EN UN SISTEMA CON
REALIMENTACION DE ESTADO.
Una consideración de diseño importante es la de
analizar el error en régimen permanente, por esta razón se
utilizan las tres entradas normalizadas, Escalón unitaria,
Rampa unitaria, Parabólica unitaria ( Cap. ¡, numeral 1.10 ).
En los desarrollos que siguen se considerarán las
constantes de error en un sistema descrito en variables de
estado .
Para encontrar el error en estado estable es conve-
niente sacar la tranformada de LAPLACE, esta propiedad tiene
además una ley adicional que es :
2.1.6.a. TEOREMA DEL VALOR FINAL.
Se sabe que, conocida la función f( t ) , la transformada
de LAPLACE de su derivada es :
L _dF = J _dF e -st - SF(s) - f(0+)dt o dt
Se desea saber el valor de la función en el infinito
Si SF(s) es analítica en la mitad derecha del plano
S, incluyendo el eje jw, excepto un polo simple en el origen
(lo que significa que f(t) tiende a un valor definido cuando
t -> oo ) , entonces :
limite f(t) - limite S F(s)t -> °o s ~> O
Para probar el teorema, se hace tender S a cero en
la ecuación de la transformada de LAPLACE de la derivada de
f(t),o :
EPN

66
ífmite [ SF(s) - f(0+) ] = límite J dF_e_~st dts->0 s-> O ° dt
(2.46.a)
como límite e"Sí = 1, se liega as-> O
límite J dF e"st dt = J_dF dts-> O O dt O dt
= F(t) = F(oo) - f(o+)
= límite [ SF(s) - f(0+) ]s ->0
y ífmite f(0+) - f(0+) la ecuación (2.46.a) se convierte ens-> O
F (oo) - f(o+) = - f(0+) + límite SF(s)s-> O
F (oo) = ífmite f(t) = límite SF(s)
s-> O
El teorema del valor final establece que el comporta
miento de f(t) en régimen permanente es igual al de SF(S) en la
vecindad de s = 0. De este modo, se puede obtener el valor de
f(t) en t = oo directamente de F(S).
Hay que notar que si f (t ) es la función sinusoidal
senwt, SF(s) tiene polos en s = ± jw y no existe límite f(t)
El teorema no es válido para una función como ésta.
El error de un sistema se define simplemente por la
diferencia entre la entrada y la salida:
e(t) = r(t) - y (t). (2.46.b)
EPN

67
En donde "e" es el error, V la entrada e "y" la salida. Interesa el
error en estado estable. {eee } :
eee = lim e (t).t-> ~
(2.47)
Usando (2.46) y (2.47) se tiene:
;ee = límite SE(s) = límite S [ R(s) - Y(s)]t -> ~ s ->0
eee - limS R(s) [ 1 - Y(s)/R(s)]s ->0
(2.48)
De la figura 2.7 tenemos las tres ecuaciones que son
requeridas para encontrar la función de tranferencia del
sistema:
B(s) = H(s) C(S)
E(s) = R(s) - B(s)
C(s) = G(s) E(s) (2.49)
cía.
Fig: 2.7 Sistema en Lazo Cerrado
Resolviendo estas tres ecuaciones tenemos otra
relación muy interesante, y es usada en sistemas de Control
entre el error del sistema E(s) y la entrada R(s), tenemos la
siguiente función de transferencia:
EPN

68
B(s) = H(s) G(s)E(s)
E(s) = R(s) - H(s) G(s)E(s)
E(s) (1 + G(s)H(s)) = R(s)
E(S) 1 (2.50)
R(S) 1 + G(S)H(S)
Nosotros necesitamos determinar el error en estado
estable del sistema cuando tenemos tres tipos de entrada.
Asumimos que la función de transferencia G(s)H(s) tiene la
forma general:
) (1+T2S) (UTMS)G(S) H(S) =
]{1+T<S) (1+TSS) (1+TNS)
(2.51)
donde:
Sn = número de polos en el origen del plano
complejo.
K = factor de ganancia de la expresión.
El exponente de S en el denominador, n, representa
el tipo del sistema (e! modelo desarrollado en este tema de tesis pertenece al
tipo cero pues Sn = 1)
La ecuación :
E(s) 1 R(s)E(s) =
R(s) 1 +G(s)H(s) 1 +G(s)H(s)
el error en estado estacionario se lo representa asi
e(t)ss — limite e (t) — limite S F(s)
t-> «> S -> o
EPN

69
S R(s)= límite (2.52)
S -> O 1 + G(s)H(s)
1.- Para una entrada Escalón Unitario.
r(t) =
e(t)ss = limite - (2.53)S - > o 1 + G(s)H(s)
1e(t) s s =
1 + límite G(s)H(s)s -> o
La cantidad lím G(s)H(s) es definida como laconstante s-^o
de posición y esta denotada por Kp:
Kp ^ límite G(s)H(s) (2.54)s ->o
La expresión del error en estado estable en
términos de la constante de posición es:
1ep = (2.55)
1 + K p
2.- Para una entrada Rampa Unitaria.
r(t) = t LL-if t ) , R(s) = 1/52 reemplazamos en
la ecuación (2.52) y tenemos :
EPN

70
e( t ) s s = limite (2.56)
S ->0 1 + G(s)H(s)
1e ( t ) s s = (2.57)
límite S G(s)H(s)S ->0
La cantidad lim SG(s)H(s) es definida como la constanteS->0
de velocidad y esta denotada por Kv:
Kv = límite S G(s)H(s) (2.58)S -> O
La expresión del error en estado estable en tér_
minos de la constante de velocidad es:
1e(t)ss = ev = (2.59)
3.- Para una entrada Parábola Unitaria.
r(t) = t2 LL-| (t), R(s) = 2/53 reemplazamos en la
ecuación (2.52) y tenemos :
S (2/S3)e ( t ) s s = limite (2.60)
S->0 1 + G(s)H(s)
2e(t) s s = (2.61)
límite S2 G(s)H(s)S -> O
EPN

71
La cantidad lim S2G(s)H(s) es definida como la constanS -> o
te de aceleración y esta denotada por Ka:
Ka = límite S2 G(s)H(s) (2.62)S-> o
La expresión del error en estado estable en
términos de la constante de velocidad es:
1ea - (2.63)
Por otro lado, si hallamos la solución en el dominio
de la frecuencia de la ecuación (2.37.a) resulta:
X(s) = [ S l-( A - K b kT ) ] -1 b K R (2.64)
con X(0) =0
lo que reemplazado en la ecuación (2,37.b) y
desarrollando, nos da:
Y(s)= K CT [ s I • ( A • K b kT ) ]-1 b (2 .65)
Rís)
que es la función de transferencia de lazo cerrado
de un sistema con realimentación de estado.
Por tanto, si tenemos interés en el error de estado
estable de un sistema con realimentación de estado, usaremos
Y(s)/R(s) de la ecuación (2.47) en (2.48) obteniéndose:
eee = lim SR(s) ( 1- KCT [ SI - ( A + K k~T ) ]-l b ) (2.66)
S -> O
EPN

72
Entonces;
sE(s) - SR(s) ( 1- KCT [ SI - ( A + K k T ) ]-1 b ) (2.67)
en donde asumimos que la ecuación (2.67) no tiene
polos en el eje jw o en el semiplano derecho.
Usaremos la ecuación (2.66) para determinar las
constantes de error en estado estable.
La constante de posición Kp está definida por:
1ep = (2.68)
1 + Kp
1 det [ -A + K b kT - K b CT]ep = = • (2.69)
1 + Kp det [ -A + K b k T ]
La constante de velocidad Kv está definida por:
(2.70)
[ (-A + K b kT) 2 + K b CT].-1 (2.71)
Kv det 2 [ -A + K b k T ]
La constante de aceleración Ka esta definida por:
1— (2.72)
Ka
EPN

73
det [ (-A 4- K b kT) 3 -f K b CT](2.73)
det 3 [ -A + K b k T ]
La evaluación de las constantes de error Kp,Kv y Ka
por la ecuaciones (2.69), (2.71) y (2.73) involucra una división
por el det [ -A + K b k T ]. Cabe preguntarse cuándo se tendrá
que det [-A + K b kT ] = O y qué implica esto. La función
de transferencia de lazo cerrado para realimentación de
estado esta dada por la ecuación (2,65):
Y(s)= K CT [ SI - A + K b kT ]-1 b
R(s )
IEvaluando la inversa de la matriz en esta ecuación
se tiene:
Y(s) K CTadj [S I - A + K b kT] b= (2.74)
R(s) det [S I - A + K b kT ]
Vemos que el polinomio característico, de lazo
cerrado, de un sistema con realimentación de estado en
variables de fase, es el det [ SI - A + K b kT ] , y los polos
de éste serán las raices del polinomio. Podemos escribir
entonces:
det [ SI - A + K b kT ] = Sn + ansn-1 + + a2S + a^ (2.75)
de aqui:
det [ - A + K b kT ] = a-j (2.76)
EPN

74
Y si el det [- A + K b kT ] = O, se ve que el polinomio
det [ SI - A + K b kT ] tiene una raíz igual a cero para k ;¿0, y
por tanto el sistema de lazo cerrado tendrá un polo en el
origen (en 8 = 0), lo que pues significa que el sistema es
inestable.
De aqui que el vector de realimentación se debe
escoger, en general, de modo que;
det [- A + K b kT] *o (2.77)
Observando la ecuación {2.74} podemos ver que C y
b pueden ser tales que un cero de lazo cerrado esté también
en el origen, cancelando un polo que se encuentre en ese
mismo lugar. Si este es el caso, las fórmulas (2.69), (2.71)
y (2.73) para determinar las constantes de error, tendrán
una indeterminación. En este caso - cancelación de un polo y
un cero de lazo cerrado en el origen - las constantes de
error pueden encontrarse a partir de la ecuación (2.66).
De esta forma, el término K CT[ S I - A + K b kT]"1b
tendrá que evaluarse como función de S. Luego de que los
ceros y polos en el origen hayan sido cancelados, el error
en estado estable, y por tanto las constantes
correspondientes, se puede encontrar directamente tomando el
limite.
En esto puede ser de gran ayuda el aplicar el
concepto (1 * * de identificación de matrices:
*det [ 1 + WTZ ] = det [ 1 + ZWT ]
en donde W Y Z son vectores columna de orden n; además:
(deí W) ( det Z ) - det ( WZ )
donde W y Z son matrices cuadradas de orden n.
1.-GUPTA y HASDORF. Fundamentáis of Automatic Control, John Wiley & Sons, 1970
EPN

75
eee = !¡m SR(s) det [I - [ SI - A + K b k ]~1 b K CT] (2.78)
S -> o
de aquí:
det [SI - A + K b k T -K b CT]eee = lim sR(s) • (2.79)
S -> o det [ SI - A + K b k Tj
Evaluando los dos determinantes de (2.78) como
funciones de S veremos rápidamente si la cancelación de
polos en el origen puede realizarse o no.
En un sistema con realimentación unitaria, a menos
que la función de transferencia de lazo abierto tenga
uno o más polos en el origen, el sistema de lazo cerrado
siempre tendrá un error de posición finito.
En cambio, con la realimentación de estado, existe
la posibilidad de conseguir e = O sin que sea necesario
que un polo de la planta esté en el origen; esto podemos
ver directamente de (2.69), si se escoge un vector de
realimentación k' , o una ganancia K, de modo que:
det [- A + K b kT - Kb CT ] = O , y (2.80)
det [-A + K b kT]*0 (2-81)
y el sistema de lazo cerrado se hace estable.
2.1.7. EMPLEO DE LOS COEFICIENTES DE ERROR PERMANENTE.
Para el estudio de esta sección también usaremos
variables de fase { variables de estado en la íorma canónica controlable ) .
Nos interesa la matriz [A - K b kT + K b CT], que tiene
EPN

76
la siguiente forma, ya que A, b, k"1" y C"1" están en variables de
fase:
O 1 O
O O O
[A - KbkT + KbCT] =
O O 1
• Kk-i - KCi) ~(a2 + KR2 - K2) ... -(an + Kkn- KCn)
(2.82)
Haciendo iguales consideraciones calculamos la
matriz [ A -Kbk T ]
O 1 ......... O
O O O
[A - KbkT ]
O O 1
-(a-) + Kk-i) -(a2 + Kk2 ) ... -(an + Kkn
(2.83)
Ya que las matrices de (2,82) y (2.83) están en la
forma canónica controlable, la ecuación (2.79) se puede
escribir directamente como:
Sn+ (an + Kkn -KC n )S n " 1 + . . . +(a2 + Kk2 - K2)S+(a-, + Kkr KC-,)eee = Lim S R(S) — • '
s ->0 Sn+ (an + Kkn)Sn~1-f- + (a2 + Kk2 )S + (a1+Kk1)
(2.84.a)
La ecuación característica del sistema es:
EPN

77
(2.84.b)
Sn+ (an + Kkn)Sn-1+......+ (a2 + Kk2 )S + (a1+Kk-|) - O, nótese
que el término constante del polinomio es positivo, asi
satisface el requisito de que todos los coeficientes de la
ecuación (2.84.a) sean positivos para que exista una respuesta
estable.
Entonces, según la entrada,obtenemos los siguientes
resultados.
a. - Entrada escalón unitaria
r(t) = u-iít) ; R(s) = 1/s
Para esta entrada, la ecuación (2.84) queda:
a., +Kkr
ep =
La constante KQ es:
a-, +Kkr KC-!(2.85)
Para lograr un error de posición nulo, con
realimentación de estado necesitamos que :
a-, + Kk1 *0 (2.86)
ya! + Kkr KC-i = O O a^ + Kk-j = KC1 (2.87)
Esto requiere que C-| O, de lo contrario el sistema
A tendrá un polo y un cero en el origen, que se anulan,
disminuyendo el orden del sistema.
Si GI ^ O , y si se han cumplido las condiciones
(2.85), tendremos siempre error nulo para la entrada escalón,
EPN

78
sean cual fueren los valores de C¡, i=2,.....,n.
sí ep = O, Kp = oo entonces el valor de Kx es:
KI = C! -a1 / K (2.88)
b . - Entrada rampa unitaria
r(t) - U-2(t) « t U-i(t) ; R(s) = 1/S2
Para esta entrada, y cumpliendo con las condiciones
(2.86)r la ecuación (2.84) queda:
a2 + Kk2- KC2
(2.90)
a-j + Kk-j
a2 + Kk2- KC2
ev= -
KC1
La constante de velocidad K es:
Kv= - (2.91)a2 + Kk2- KC2
Para obtener error de velocidad nulo, con realimen-
tación de estado, debe cumplirse que:
a-, +Kkr KC-i ?t O (2.92.a)
ya2 + Kk2- KC2 ?t O Ó a2 + Kk2 = KC2 ' (2.92.b)
se logra también cuando :
K2 = C2 - a2 / K (2.93)
En una planta sin ceros, o planta polar,
C2 « C3 = .......... » Cn « 0.
EPN

79
Esto quiere decir que no podemos conseguir error
nulo de velocidad en un sistema con realimentación de estado
y planta polar; pues habría que hacer la consideración de
que a2 + Kk2- O, pero esto implica que el coeficiente de la
primera potencia de S del polinomio característico de la
ecuación (2.41) sea nulo, y el sistema, por tanto, sea
inestable.
Si ag + Kkg >0, el sistema será estable, pero tendrá
un error de velocidad finito - para una planta polar -, El
error para este caso es:
a2 + Kkgev= • • (2.94)
KC-j
Por tanto, en un sistema estable con realimentación
de estado, en régimen permanente, tanto con una entrada en
escalón como en rampa, sólo puede lograrse error nulo cuando
la planta tiene al menos un cero.
En una planta polar C-\- 1 y 02=0; asi K2 = - a2 / En
este caso la primera potencia de S en la ecuación
característica, ecuación (2.89) tiene el coeficiente nulo y
el sistema es inestable. Por tanto no puede conseguirse un
error nulo en régimen permanente para una entrada en rampa
con una realimentación de variables de estado en un sistema
con planta polar.
El error en una planta polar (sin ceros) es:
e(t)ss= ( K2 + a2/ K)
c.- Entrada parabólica unitaria
r(t) = u-3(t) = t* U-^t) ; R(s) - 1/S3
Para este tipo de entrada conviene considerar
separadamente la planta polar de las plantas cero-polares.
Para una planta sin ceros, 02 = 03= ..= Cn = O y C-j=Ode
la ecuación (2.84) se ve que.
EPN

80
Por tanto una planta sólo polar no puede seguir a
una entrada parabólica, ocurre incluso si no se satisface la
ecuación (2.88)
Si imponemos las condiciones para que tanto el error
de posición como el de velocidad sean ceros en un sistema
estable cero -polar, en la ecuación (2.84), para la entrada
parabólica queda:
a3 + Kk3- KC3 a3 + Kk3- KC3
ea= - • = - (2.95)a-j+ Kk-j KC1
La constante K de aceleración es :
Ka = - (2.96)
a 3 + Kk-j- KC-j
Las condiciones para obtener un error de
aceleración nulo son :
31 + Kk1 - KC1 # O
a3 + Kk3- KC3 = 0 O a3 + Kk3 = KC3
K3 = C3-a3/ K (2.97)
Por tanto sólo podemos lograr error nulo en régimen
permanente para una entrada parabólica en un sistema en el
que C3 ^ O es decir que tenga dos o más ceros.
Cuando un sistema tiene un solo cero : C3 = C^. = ...... ..=
Cn-0 , no puede lograrse error de aceleración nulo con
realimentación de estado, pues para esto se necesitaría que
a3 + Kk3 = O , pero con ello se produce un coeficiente cero
para el término en S2 del polinomio característico de la
ecuación (2.41), dando lugar a inestabilidad del sistema.
EPN

81
Si a3 + Kk3 O y además el sistema tiene un solo cero,
el sistema será estable pero tendrá un error de aceleración
finito e igual a :
a3 + Kk3
(2.98)
KC1
En el caso de que W >2 y se cumplan las condiciones
para que e ( t ) ss =0 para las tres entradas normalizadas,
dadas por las ecuaciones (2.88), (2.89), (2.97)
Los resultados obtenidos y consideraciones hechas en
la presente sección se resumen en las tablas 2.1 y 2.2.
Sistema con Nc de Ceros Kp K v Ka
Realimentación Requeridospor Variablesde Estado. ( w )
Planta Polar W = 0 ~ KC-j
Kk
Planta
C e r o - P o l a r
X! 00 KC-J
a^+ Kk-jj
W> 2
Tabla 2.1 Coeficientes de error permanente en un sistema con realimen-
tación de estado.
* Para una representación en variables de fase ( forma canónica
controlable)
EPN

82
Sistema Nc de Ceros ESCALÓNRequeridos
RAMPA PARÁBOLA
Planta •
Polar
w -= O KC Hay error
permanente.
No puede seguir
esta entrada.
PlantaCero-Polar
w
w > 2
a1+Kk1=KC1 a2+Kk2=KC2 Hay error
permanente
Tabla 2.2 . Sistema con Realimentación por Variables de Estado:Condiciones necesarias para error nulo permanente .
Tal como indican las tablas 2.1 y 2.2, las
especificaciones del tipo de entrada que el sistema debe
poder seguir determinan el número de ceros que deben
incluirse en Y(s)/R(s). El número de ceros determinan la
facultad del sistema para seguir una entrada particular sin
error permanente y ser además estable.
EPN

83
2.2 ESTIMRCION DE ESTflDO.
2.2.1 INTRODUCCIÓN.
La gran mayoría de métodos de control suponen
conocidas perfectamente (caso determinista) - o por lo menos las
características estadísticas (caso estocástico) - las ecuaciones
del proceso que permiten calcular la salida a partir de una
entrada (modelo), y los valores de todas las variables de
estado (sistema observable).
En la realidad, al comenzar el diseño de un sistema
de control no se conoce el modelo del proceso, por lo que es
preciso obtenerlo ya sea por un método teórico o
experimental. Obtener el modelo y los valores de sus
parámetros es identificar el proceso.
Después de haber demostrado la Controlabilidad del
sistema, y haber asignado en forma arbitraria los polos de
lazo cerrado mediante el cálculo adecuado de los elementos
del vector de realimentación k, ya en la práctica, la
asumción de que todos los estados son accesibles, y si lo
fueran, no es conveniente utilizar un gran número de
sensores sabiendo que no todos ellos son necesarios cuando
se usan métodos de diseño clásico, e incrementan el costo
del sistema.
También existen sistemas no observables, al no tener
acceso a todas las variables de estado por ser imposible o
demasiado caro o porque las medidas contienen ruido y por lo
tanto no podemos conocer el valor real de los variables de
estado.
En cualquiera de estos casos se precisa de un
Estimador (llamado también Observador o filtro) de las variables de
estado es decir que permita la reconstrucción o estimación
de algunos estados del sistema que dé unos valores de éstos
cercanos a los reales.
La figura 2.8, ilustra el diagrama de bloques de un
sistema de control con realimentación de estado y con el
Estimador, asumiendo que el vector de salida y(t) e s
accesible. El vector de estado estimado se ha simbolizado
X(t).
EPN

84
R(t)Proceso Centro,
Estimador .X(t)1-
Y(t;
Fig 2.8 Sistema de Control con Estimador incorporado
Para que exista el Estimador es necesario que el
sistema sea completamente observable, y, que el vector de
estado sólo puede ser estimado con información de la salida
y(t), la entrada U(t) y los valores pasados de estas
variables.
Las técnicas de diseño en el espacio de estado son
válidas para el caso de sistemas multivariables, sin embargo
para nuestro caso el sistema es de una sola entrada y una
sola salida. Por esta razón, en lo que se refiere a la
planta estará definida por las siguientes ecuaciones de
estado:
X = AX + B U
Y = C X
Donde A es una matriz de orden n x n, B es un vector
columna de orden n y C es el vector fila de orden n, u (t) y
y(t) son escalares que representan a la entrada y salida
respectivamente, las ecuaciones de estado generales incluyen
un término más en la ecuación de salida, sin embargo en esta
tesis no se considera ese término por ser igual a cero.
Tomando en consideración las ecuaciones de estado de
la planta se puede construir un esquema de la explicada
teoría de realimentación de estado, figura 2.9.
EPN

85
u (OX= A X 4 - BU
y(t)
x(t)E S T I M A D O R
Fig 2.9 Sistema con Observador y Realimentación de Estado.
El procedimiento de diseño, antes señalado consta
de dos pasos independientes':
1.- En el primer paso hemos asumido que todos los
estados del sistema son conocidos para propósitos de
realimentación. Esta asumción nos permitió proceder con el
diseño de la ley de control. En este caso se ha hecho la
asignación de polos al sistema y se ha determinado la
matriz k de realimentación, ver fig 2,11 Además hemos
considerado en el diseño que la entrada es cero, es decir,
solo la respuesta natural del sistema.
u(0X = AX+ BU
Fig 2.10 Diagrama para proceder con la Ley de Control.
2. - Nuestro siguiente paso es el diseño del
estimador considerando el sistema en lazo abierto, es decir,
cuando k=0 . Nuevamente se realizará una asignación
EPN

86
arbitraria de polos para el estimador con el objeto de
minimizar el error en el estado estimado X(t). En este caso
se obtendrá una nueva matriz que permita la asignación
arbitraria de polos y que se halla dentro del bloque del
estimador en el fig. 2.8.
U(t)P r o c e s o Contro lado
y (O
x(t)E S T I M A D O R
F¡g 2.11 Diagrama en lazo abierto para diseñar el Estimador.
Para posteriormente tener el algoritmo final de
control que consistirá en la combinación de la Ley de
Control y del Estimador. El sistema resultante se denominará
Centrolador. Más adelante verificaremos que el sistema
combinado control-estimador tiene los mismos polos que
aquellos del control sólo y del estimador sólo. Esto es
consecuencia del principio de separación ecuación (2.125) ,
según .el cual el control y la estimación pueden ser
diseñados separadamente y no obstante pueden ser combinados
en un sólo sistema.
Respecto a la Ley de Control, esta ya fue
desarrollada en la sección 2.1
EPN

87
2.2.2 OBSERVABILIDAD.
En los sistemas monovariables (una sola entrada y salida, no
tiene sentido hablar de observabilidad ). En cambio, en los sistemas
multivariables descritos por sus variables de estado son
conceptos fundamentales y constantemente utilizados. Muchas
propiedades de los sistemas de variables de estado suponen
que son observables.
Se dice que un sistema es observable en el tiempo t0
si con el sistema en el estado X ( t o ) , es posible determinar
este estado partiendo de la observación de la salida durante
un intervalo de tiempo finito. De hecho , las condiciones de
observabilidad pueden determinar la existencia de una
solución concreta al problema planteado y a su solución
óptima.
Se añade el calificativo de completamente observable
para distinguirlo de los parcialmente observables en los que
no todas las variables de estado pueden medirse. Estos
sistemas, a pesar de llamarse a veces parcialmente
observables, son no observables en el sentido estricto del
concepto de observabilidad.
Sea el sistema descrito por las ecuaciones
siguientes:
X = A X (2.99)
Y = C X (2.100)
donde:
X = vector de estado ( vector n-dimensional )
Y = vector de salida ( vector m-d¡mensional)
A = matriz de n x n
C = matriz de m x n
EPN

Decimos que el sistema es completamente observable
si se puede determinar todo estado inicial X(0) a partir de
la observación de Y(t) en un intervalo de tiempo finito. El
sistema es, por tanto, completamente observable si toda
transición del estado puede afectar a todo elemento del
vector de salida. El concepto de observabilidad es útil
para resolver el problema de reconstruir variables de estado
no medibles en el espacio mínimo de tiempo posible.
Debe considerarse al sistema como no forzado por lo
siguiente: si el sistema es descrito por:
X = A X + B U
Y = C X
entonces
tx(t) = eAt X(0)+ J eA (I-T ) BU(-C) d T (2.101)
o
y(t) es
tY (t) = C eAt X(0) + C J eA (^ ) B U (T) d t ( 2.102)
o
Como conocemos las matrices A, B y C y también se
conoce u(t), el término integral en el miembro derecho de
esta última ecuación es una magnitud conocida. por tanto, se
la puede restar del valor observado de y (t) . Por tanto para
investigar una condición necesaria y suficiente de
observabilidad completa, basta con considerar el sistema
descrito por las ecuaciones (2.99) y (2.100).
si el vector de salida y (t) es
y(t) = C eAt X(0) (2.103)
EPN
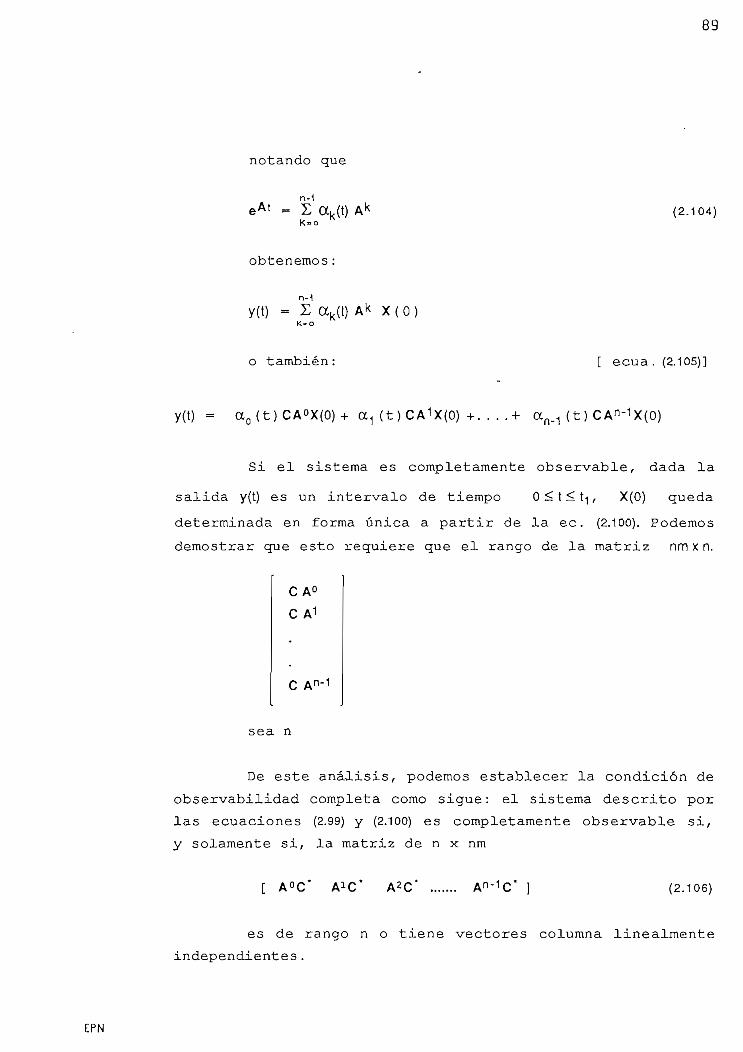
89
notando que
n-1eAt = X ak(t) A* (2.104)
obtenemos:
n-í
y(t) - E (Xk(t) A* X(0)
o también: [ ecua. (2.105)]
y(t) = a0(t)CA°X(0) + a1 (t)CA1X(0) + + an-1 (t} CAn-1X(0)
Si el sistema es completamente observable, dada la
salida y(t) es un intervalo de tiempo O < t < t-j, X(0) queda
determinada en forma única a partir de la ec. (2.100). Podemos
demostrar que esto requiere que el rango de la matriz nm x n.
C A°
C A 1
sea n
De este análisis, podemos establecer la condición de
observabilidad completa como sigue: el sistema descrito por
las ecuaciones (2.99) y (2.100) es completamente observable si,
y solamente si, la matriz de n x nm
A°C* A2C* (2.106)
es de rango n o tiene vectores columna linealmente
independientes.
EPN

90
RANGO Mo = Rango [ (AT)°CT (AT)ICT (AT)2cT
(2.107)
RANGO Mo = n.
2.2,3 ESTIMADOR DE ESTADO
Como dijimos antes no todos los estados del sistema
son conocidos y aprovechables para hacer realimentación de
estado. Un estimador reconstruye el vector de estado X(t)
ya sea totalmente o solo en parte. El vector estimado X(t),
por lo tanto modificaremos tá ley de control así :
U = - k X (2.108)
En donde X representa un estado estimado, las figuras
2.8 y 2.9 de la parte introductoria de este tema muestran los
esquemas de realimentación de estado utilizando un estimador
de estado, al igual que la fíg 1.3.
En este numeral analizaremos en detalle el estimador
y el sistema Controlador completo. Estudiaremos el efecto de
utilizar en el control la ecuación U = - k X en lugar de
U= - kX.
Antes de empezar el estudio del estimador, es
necesario recordar las condiciones bajo las cuales puede
diseñarse un estimador.
Dado e! sistema continuo :
X = A X + B U (2.109)
El vector de estado puede ser construido con
información de la entrada y la salida si el sistema es
completamente observable o reconstruible.
EPN

91
En forma general un estimador de estado debe ser
diseñado tal que el estado observado X(t) se vaya aproximando
en lo posible al estado actual X(t). Hay muchas maneras de
diseñar un estimador de estado y generalmente hay más de una
forma de lograr la aproximación de X(t) a X(t) .
Intuitivamente, el estimador de estado debe tener las mismas
ecuaciones de estado que el sistema original. Sin embargo el
observador debe tener una configuración con u(t) y y (t) como
entradas, y debe tener la capacidad de minimizar el error
entre X(t) y X(t) automáticamente.
Los estimadores pueden ser clasificados en dos
grupos:
1 . - De acuerdo con el error entre el verdadero
valor y el estimado, se tiene estimadores de
predicción y de actualización
2 . - De acuerdo con el número de variables de
estado a estimarse, se tiene estimadores de
vector de estado total o parcial, éste último
conocido como estimador de orden reducido.
Para el desarrollo del péndulo invertido en lo que
respecta a estimación de estado, se utilizará el estimador
de predicción, ya que nos interesa minimizar el error entre
el verdadero valor y el estimado.
Dado el sistema continuo.
X = AX + B U (2.110)
EPN

9Z
El vector de estado X puede ser construido con
información de la entrada y la salida si el sistema es
completamente observable.
2.2,4 ESTIMADOR DE PREDICCIÓN.
Un estimador de predicción consiste en un modelo de
la planta dinámica construido en base a las verdaderas A, B,
C del sistema. La figura (2.12) ilustra la planta y el
estimador alimentado solo con la información de entrada
U (t) . Nótese que en este tipo de estimador se reconstruye
todo el vector de estado, por lo que también es conocido con
el nombre de estimador de orden completo. para el caso de la
figura (3.3) se tiene:
X = AX + B USistema Real
Y(0
D *w ¿*',+J
A
x(í)C
Y(t)
FIg. 2.12 Estimador sin Información de la salida.
Se define el error en la estimación como:
e = X - X (2.111)
Por lo tanto, si el valor inicial del vector
estimado X es erróneo, entonces no es posible realizar
EPN

93
ninguna corrección del error de estimación ya que A está
dada. Sin embargo, si en lugar de utilizar un esquema en
lazo abierto como el de la figura (2.12) , se utiliza un
esquema en lazo cerrado, esto es, si se realimenta la
diferencia entre la salida real y la salida estimada y se
corrige el modelo constante, la señal de error puede ser
controlada y minimizada. El esquema del estimador con esta
característica se indica en la figura (2.13) .
L
1
1111iL
Kt)
_
Plantax= AX + B u
ModeloY f. * nA — A X + B U
X(t)
xCO
cVCD
4- 'y(t) ^^
i^ !r^\ i-— !i
ESTIMADOR
Fig. 2,13 Estimador en lazo-cerrado.
Notemos la necesidad de que el estimador tenga
también como entrada a la salida de la planta. Se comprueba
asi la condición necesaria bajo las cuales puede diseñarse
el estimador.
El objetivo de diseño es la selección de la matriz
L para cumplir ciertos requisitos en lo que al error de
estimación se refiere. En la figura (2.14) se indica con más
detalle el estimador en lazo cerrado.
u(t)
Fig. 2.14 Estimador en lazo-cerrado
EPN
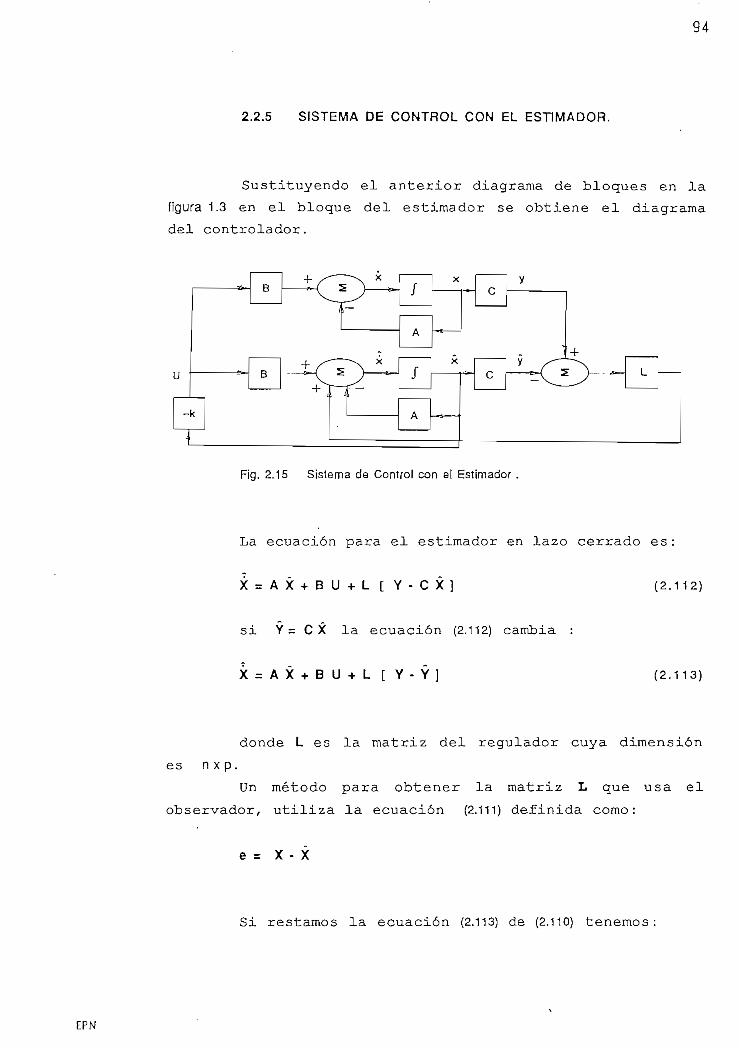
94
2.2.5 SISTEMA DE CONTROL CON EL ESTIMADOR.
Sustituyendo el anterior diagrama de bloques en la
figura 1.3 en el bloque del estimador se obtiene el diagrama
del controlador.
Fig. 2.15 Sistema de Control con el Estimador .
La ecuación para el estimador en lazo cerrado es:
= A X + B U + L [ Y - C X ] (2 .112)
si Y = C X la ecuación (2.112) cambia
L [ Y - Y ] (2 .113)
donde L es la matriz del regulador cuya dimensión
es n x p.Un método para obtener la matriz L que usa el
observador, utiliza la ecuación (2.111) definida corno:
e = X - X
Si restamos la ecuación (2.113) de (2.110) tenemos:
EPN

95
X-X = A [ X - X ] - L C [ X - X ] (2.114)
En términos de error de estimación, la ecuación
(2.114) queda :
¿ = [ A - L C ] e (2.115)
Ahora el comportamiento del error está definido por
la matriz [ A - L C ].
Para una apropiada elección de la matriz L del
Observador, todos los valores propios de [ A - L C ] son
asignados en la parte izquierda del plano, de modo que el
estado fijo del valor e(t} para cualquier valor inicial sea
cero , y dependiendo del valor de L el estado estimado X (t)
convergerá al estado real X(t) tan rápido como sea posible.
Es decir:
limite e(t) = O
t --> oo
Nótese que la ecuación (2.115) tiene forma parecida a
la ecuación de la ley de control X= [ A - Bk ] X , el cálculo
de L puede hacerse a partir de las ecuaciones obtenidas al
igualar los polinomios característicos, tal como se lo
representó en la ecuación (2.75).
det [ SI - A + LC ] = (S-a-i) (S-a2) (S-a3) ...... (S-an)
donde a-j, ag - . . an son las ubicaciones deseadas
para los polos de lazo cerrado " del estimador ".
De acuerdo a como ya se explicó en el numeral 2.1.5 y
la ecuación (2.46.a). Asignando los valores propios en la parte
izquierda del plano es sinónimo de que la respuesta es
exponencial negativa (Cap. I numeral 1.10)
EPN

96
La ecuación (2.115) indica que el error no tiene una
entrada y es excitada solamente por las condiciones
iniciales. Entonces el error no es determinado por la
entrada del sistema.
Esta facilidad del estado del observador de
aproximarse al estado de la planta, para cada entrada. Los
valores propios de [ A - LC ] son usualmente seleccionados de
modo que estos o ellos estén lejos de la izquierda de los
valores propios de A. Entonces el estado del Observador se
aproxima rápidamente al estado de la planta.
El diagrama físico de la planta representado por la
ecuación (2.83).
X = A X + B U (2.116)
Y = C X (2.117)
y el E s t i m a d o r representado por la ecuación
(2.113).
X = A X + B U + L [ Y - Y ] (2.118.a)
Es conveniente considerar el concepto de
observabilidad, un sistema descrito por el par de matrices
[A,C] es observable si su matriz de observabilidad es no
singular.
La ecuación del estimador de predicción toma su
forma definitiva cuando se reducen términos en la ecuación
(2.118.a), es decir:
X = A X + B U + L [ Y - C X ]
X = A X + BU + L Y - L C X
X = [ A - LC] X + B U + L Y (2.118.b)
EPN

97
donde Y = C X
con la ecuación {2.118.b} dibujamos en forma esquema-
tica el estimador, ver figura 2.16
U(t)
y( t )
Fig 2.16 Esquema simplificado del estimador predíctor
2.2.6. EL PROBLEMA DEL REGULADOR (EL CONTROLADOR
Hasta ahora hemos analizado los siguientes aspectos:
a) Se ha modificado la dinámica de la planta
determinada por A mediante la ley de control asumiendo que
no se utiliza ningún estimador ubicando los polos del
sistema en lazo cerrado en posiciones adecuadas .
b) Se ha diseñado un estimador de estado sin
realizar realimentación de estado ( esto es, en lazo abierto) . Este
estimador presenta polos determinados por el polinomio
característico.
Falta realizar la realimentación de estado
utilizando el estimador y examinar que efecto tiene utilizar
0 « - K X en lugar de U = - KX.
Al combinar el bloque K. proveniente de la ley de
control y el bloque del estimador se obtiene lo que se llama
el CONTROU\DOR, así lo demuestra la fig. 2.15.
EPN

98
El sistema completo de la fig. 2.17 se denomina
normalmente el REGULADOR pues es el esquema utilizado para
mejorar el comportamiento de la planta f ren te a
perturbaciones ( es decir sin tomar en cuenta el comportamiento ante variaciones de
la señal de referencia } .
Controlador
Fig 2.17 Sistema con realimentación de estado usando el Estimador.
El regulador viene definido por dos ecuaciones (2.110
y 2.113), la ecuación de la planta (2.110) que contiene un
conjunto de variables de estado y la ecuación del error
(2.115) en el estimador que contiene otro conjunto de
variables de estado. De este modo, el regulador tiene un
orden mayor que el de la planta.
Está demostrado . en la figura 2.14
Estimador en lazo cerrado.
o llamado
El estado estimado X, puede ser usado en lugar del
estado X en el control del péndulo invertido.
U LEY DE CONTROL ES:
U = - K X
además
X = A X + B U
e = X - X
e = f A - LC ] e
(2.1 19)
(2 .120 )
(2 .121 )
( 2 . 1 2 2 )
EPN

sustituyendo (2.119) y (2.121) en (2.120)
tenemos la ecuación de la planta:
99
= A X + B [ - K X ]
= A X - B K [ X - e
= [ A - B K ] X + B (2 .123)
La composición en lazo cerrado consiste en la
interconexión de la planta y observador ( ver fíg. 2.15 ) y el
controlador U = -K X.
El sistema en lazo cerrado está representado por las
ecuaciones:
e = [ A - LC ] e
X = [ A - B K ] X + B K e
podemos escribir:
A - BK B K
A - LC
(2.124)
Por tanto la ecuación característica del regulador
sera:
-( A - BK) B K
XI - ( A - LC)
EPN

100
El polinomio característico de la matriz :
Q( X) = [ Xl-( A- BK)] . [ Xl-(A - L C)] = O (2.125)
Por tanto los valores propios de [ A • BK ] y [ A - LC]
pueden ser asignados independientemente de la selección de
las matrices K y L.
La ecuación (2.125) demuestra lo que se había
mencionado antes: los polos del Regulador son la reunión de
los polos del Estimador y los polos conseguidos para la
planta con la Ley de Control. Este principio es conocido en
teoría de Control Moderno como el " principio de separación " .
En virtud de esta propiedad importante tanto el Observador
(Estimador) y el bloque correspondiente a la Ley de Control
pueden ser diseñados separadamente.
2.2.7 POLOS DEL ESTIMADOR
Puesto que deseamos que los polos dominantes en el
Regulador sean aquellos conseguidos para la planta con la
ley de Control, en la práctica se escogen los polos del
Estimador mucho más rápidos que los polos de Control, de
este modo el estado estimado se obtiene rápidamente antes
que el estado de la planta varíe en forma notoria.
Supongamos que S1=a1+jb1 son los polos de control
dominantes trasladados al plano S. Para encontrar los polos
en el plano S que sean \\f veces más rápidos recordemos que el
tiempo de establecimiento viene dado por :
{$1 = 4/5 (criterio del 2%) (2.126)
( Numeral 1.8. Cap.I.)
donde:
EPN

101
6 i - Ci « -*! - 5 ! = Ci : Wn1= -3l (2-127)
Entonces ts2 = 1 / \ i / t ts1 = - 4 /a2 lo cual nos lleva a
que a2=Yai s^ e^- coeficiente de amortiguamiento £ permanece
invariante se obtiene que b2 = y b1 . Es decir, los polos
del estimador en el plano S serán:
s2 = YS-L (2.128)
Normalmente, basta tomar \|/ = 4 . Si existen varios
polos dominantes en el control, puede hacerse este
procedimiento con cada uno de los polos, para "hallar los
polos del estimador .
El Controlador independientemente del Estimador, puede
ser descrito por un par de ecuaciones de estado de la forma:
Xc(t) = A' Xc(t) + Bf y(t)
U(t) = C1 Xc(í) + D' y(t) (2.129)
Donde la matriz A' y los vectores fila y columna C'
y B' tienen un orden n o n-1 y Des un escalar
Nótese que para el Controlador se tiene que :
det [Xl - A ] ecuación característica;
U(t)
- = C' [ A.I - A ] -i B' + D1 función de transferenciaY ( t )
Obtener las matrices A1, B', C', D1 para el estimador es
de mucha utilidad.
EPN

102
El Controlador con Estimador de Predicción obtenemos
reemplazando la Realimentación de Estado U(t) = - K X (t)
a la ecuación del Estimador de predicción (ec. 2.118.b).
X = [ A - L C ] X - t - B U + LY
X = [ A - L C ] X + B [ - K X ] - t - L Y
X = [ A - L C - B K ] X + L Y (2.130)
U = - K X
Por tanto tenemos:
A' = [ A - L C -BK ]
B'= L
C = - K
D = O (2.131)
A partir de las ecuaciones (2.130) y (2.131) se pueden
obtener un conjunto de valores para realizar gráficos que
permitan visualizar la bondad del diseño realizado. •
EPN

Determinación do las Ecuaciones
Matemáticas de los
Elementos del Sistema
EPN

103
CAPITULO III
A continuación se obtendrán las ecuaciones necesarias
para el diseño del sistema de Control del Péndulo Invertido,
el procedimiento no es más que el seguimiento de la parte
teórica desarrollada en los dos capítulos anteriores, se
insertarán varios comentarios acerca de cada uno de los
resultados obtenidos.
3.1. ESTUDIO DE LR PLRNTfl
3.1.1 INTRODUCCIÓN.
Hay diversos problemas en el estudio de sistemas
eléctricos y mecánicos relacionados con los sistemas de
control automático, por ejemplo, el mantenimiento de un
satélite en su propia órbita, el control de un helicóptero/
el control de empuje hacia arriba de un cohete etc. Todos
estos problemas tienen la caracteristica del balanceo, eso
implica el control de un sistema inestable, o un sistema que
no permanece propiamente orientado . En este capitulo un
aparato electro-mecanico será desarrollado para el control
del péndulo invertido.,
Para comprender y controlar el sistema, debemos ahora
obtener el modelo matemático cuantitativo; para ello, es
necesario analizar las relaciones entre las variables. El
sistema considerado es de naturaleza dinámica; las ecuaciones
descriptivas serán ecuaciones diferenciales, las mismas que
se linealizarán para que se aproximen, a las condiciones
reales.
Es necesario además introducir ciertas suposiciones
concernientes a la operación del sistema, empleando las leyes
físicas que describen el mismo.
El camino que seguiremos para resolver el problema
EPN

104
de este sistema dinámico puede establecerse como sigue:
Definir el sistema y sus componentes.
Formular el modelo matemático y enumerar las
suposiciones necesarias.
Escribir las ecuaciones diferenciales que
describen el modelo.
Examinar las soluciones y las suposiciones.
Este camino seguiremos en el siguiente numeral.
4.-
3.1.2 ANÁLISIS DEL PROBLEMA DEL PÉNDULO INVERTIDO.
3.1.2.a OBTENCIÓN DE LA ECUACIÓN DIFERENCIAL.
Las ecuaciones diferenciales que describen el
func ionamiento dinámico de este sistema se obtienen
utilizando las leyes físicas del movimiento curvilíneo.
3.1.2.3.1 COMPONENTES DEL SISTEMA.
Consideremos el sistema de la figura 3.0
m
mg
Flg 3.0 Péndulo Invertido
En esta figura tenemos
EPN
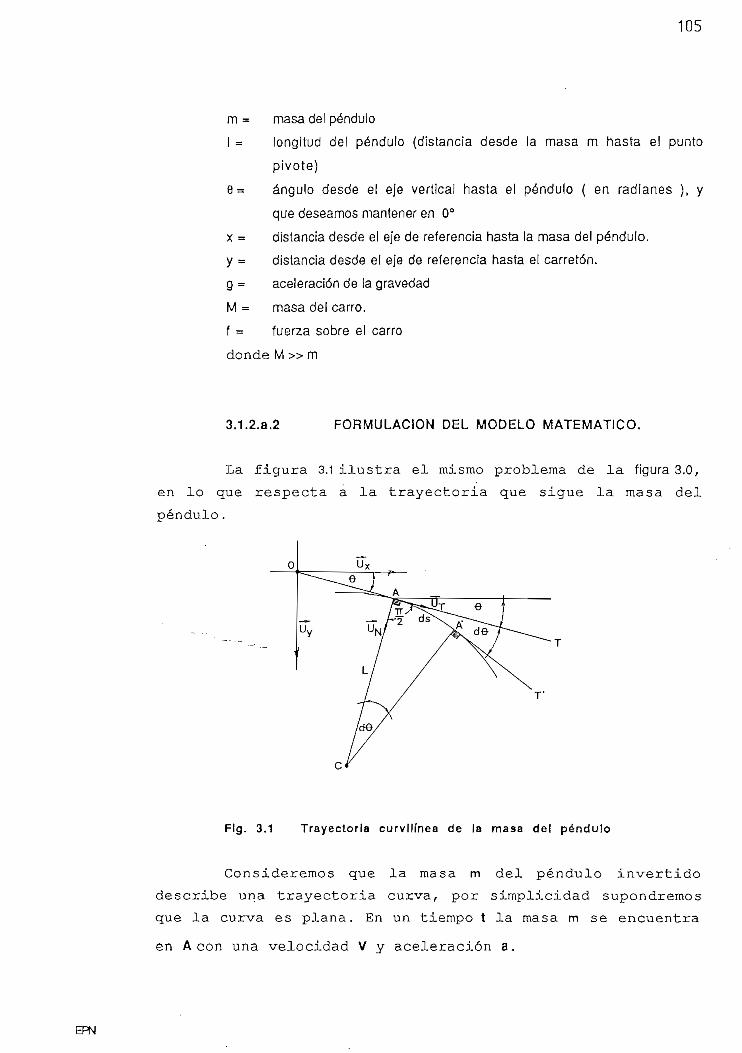
105
m = masa del péndulo
I = longitud del péndulo (distancia desde la masa m hasta el punto
pivote)
e= ángulo desde el eje vertical hasta el péndulo ( en radianes ), y
que deseamos mantener en 0°
x = distancia desde el eje de referencia hasta la masa del péndulo,
y = distancia desde el eje de referencia hasta el carretón,
g = aceleración de la gravedad
M = masa del carro.
f = fuerza sobre el carro
donde M » m
3.1.2.8.2 FORMULACIÓN DEL MODELO MATEMÁTICO.
La figura 3.1 ilustra el mismo problema de la figura 3.0,
en lo que respecta a la trayectoria que sigue la masa del
péndulo.
r
Flg. 3.1 Trayectoria curvilínea de la masa del péndulo
Consideremos que la masa m del péndulo invertido
describe una trayectoria curva, por simplicidad supondremos
que la curva es plana. En un tiempo t la masa m se encuentra
en Acón una velocidad V y aceleración a.
EPN

106
En la figura 3.1 tenemos:
ds = AA' pequeño arco de curva, donde las rectas
normales a la curva en A y A' se intersectan en
el punto C.
C = centro de curvatura.
I = CA, longitud del péndulo (radio de curvatura) ,
ds = 1 d9, (3.0)
e! ángulo está expresado en
radianes.
F!g 3.2 Longitud de arco - radio x ángulo
de la ecuación 3.0 tenemos
dsL= (3.1)
de
La variación del ángulo con respecto al tiempo
09 f se lo puede formular como:dt
de de ds— = (3.2.a)dt ds dt
donde: _ELdt
es la variación longitud de arco con respecto al
tiempo y se conoce como velocidad lineal.
de de= V (3.2.b)
dt ds
Si relacionamos (3.1) y (3.2.b), tenemos la siguiente ecuación;
EFN

107
de
dt(3.3)
Tracemos en A (fig H) un vector unitario Uj tangente a
la curva. La velocidad esta expresada de la siguiente forma
V = 11 V. Asi la aceleración será:
dv d(UTv) UTdv dUT—-
dt
(3.4)
dt dt dt
Si la trayectoria fuera una recta, el vector U-j- seria
constante en magnitud y dirección dU-j-/ = O
Pero la trayectoria es curva, la dirección de Uj
varia a lo largo de la curva, dando un valor diferente de
cero para dU-y 7 _ Para proseguir debemos calcular dlí-j- /<-((.
Introduzcamos el vector unitario U^, normal a la curva
dirigido hacia el lado cóncavo. Sea 6 el á.ngulo que hace la
tangente a la curva en A con el eje X, podemos escribir,
usando
UT - Ux eos 6 + Uy sen 9 (3.5)
relación que se obtiene de la fig (3.3) y es lo que se
explica a continuación.
Flg 3,3
EPN

108
aplicando los conceptos de suma de vectores
^obtenemos las siguientes expresiones:
UT = Ux eos 0 + UY sen 0 (3.6)
UN = Ux eos ( 0 + TC /2 ) + UY sen ( 0 + 7t /2) (3.7)
UN = - Ux sen 0 + UY eos 0 (3.8)
Derivando la ecuación (3.7) con respecto al tiempo,
tenemos las siguientes ecuaciones:
dUT Uxsen 0 d0 UY eos 0 d0
dt dt dt
dUT d0
( -Ux sen 0 + UYCOS 0 ) (s.g.b)dt di
Reemplazando la ecuación (3.8) en la ecuación (3.9.b)
tenemos la siguiente relación :
dUT d9- • = UN - (3.10)
dt dt
Ahora:
d0 V= en la ecuación (3.10)
dt I
tenemos :
dUT V= UN— (3.11)
dt
EPN

109
Introduciendo este resultado en la expresión de
obtenemos finalmente .
dv V2
a = UT_ + UN_ (3.12)dt L
donde :
dv
aT = UT - aceleración tangencial, vector tangente a la curva.
dt
aM = UN — • aceleración normal
L
La velocidad V, siendo tangente al circulo, es
perpendicular al Radio L = C A cuando medimos distancias a lo
largo de la circunferencia del circulo a partir de A, tenemos
S = L6, de acuerdo a la ecuación (3.0).
Por consiguiente aplicando V= Uy ds / = U-p v y
considerando el hecho de que L permanece constante,
obtenemos :
v=s ds/dt = R d9/dt
donde L = R longitud de radío que describe curva.
w = d9/dt
Se denomina velocidad angular, y es igual a la
variación del ángulo descrito en la unidad de tiempo
v = L W ,si: w = velocidad angular.
EFN

110
a = d W/dt a = aceleración angular.
0 - desplazamiento angular
dV dW
aT = — = L —dt dt
d d
aT =
dt dt
d29
aT = L
La ecuación (3.12) expresada de otra forma es:
V2
3 - UT L - + UN • - (3.14)
dt dt
3.1.2.3.3 ECUACIÓN DIFERENCIAL QUE DESCRIBE EL MODELO
MATEMÁTICO
Para obtener el modelo matemático de la figura (3.4),
que representa nuevamente el péndulo, pero en términos de las
leyes actuantes, aplicamos primero L Fx = O, (suma de las fuerzas
en dirección horizontal) y luego hace hacemos Z M = O ( suma de los
torques respecto del punto pivote S ) .
EFN

111
la aceleración
del
Fig 3.4
donde:
F2,= f ue r za causada por
tangencial del péndulo
F = fuerza causada por la aceleración
carretón.
í(t) = es igual a la fuerza sobre 'el carretón
F-L = fuerza de reacción causada por el peso
del péndulo.
Tenemos:
F2. = m ATí aplicando la ecuación : Ay = UT L d20 / <jt2 = L 6
aceleración tangencial, o vector tangente a la curva. AT = LO
F21 = m L 9
En el triángulo NCO
F2 = F2- cos9 por consiguiente:
F2 = m I Ó eos 6
En el triángulo CAB tenemos:
F3 = M d2Y /dt2 = M Y
Para la ecuación de fuerzas (2 FX = 0)
F3 + F2 - f(t) = O -
EPN

112
Tenemos como resultado:
M y + m L 0 eos 0 - f ( t) = O (3.15.a)
Para obtener la suma de momentos respecto del punto
pivote S. Supondremos que M»m y que el ángulo de rotación
0 es muy pequeño de tal manera que las ecuaciones se
linealizarán. La suma de los torques respecto del punto
pivote S es:
F3L + F2L + FT L = O
m L y + m L2 0 eos 0 - m L g tag 0 =0
y + L 6 eos 0 - g tag 0 =0 (3.1 s.b)
Podemos considerar de la geometría de la figura 3.4
la ecuación:
X « Y + Z
triángulo OPQ
Zsen 6 = •
L
Z = L sen e reemplazamos en X = Y + Z y tenemos :
x = y H- I sen e (3.16)
Por tanto las ecuaciones que describen el sistema
son:
X = y + Lsen 0 (3.16)
M y + m L 6 eos 0 - f ( t) = O (3.15.a)
y + L 0 eos 0 - g tag 0 =0 (3.1 s.b)
EFN

113
3.1.2.b LiNEALIZACION DEL MODELO MATEMÁTICO.
Para nuestro caso (péndulo invertido) , las ecuaciones
diferenciales (3.15) y (3.16) están expresadas en función del
ángulo 9, vamos a linealizarlas considerando:
sen 0 = tag 9 - 0
eos 9 = 1
Cuando 9 se encuentra entre los valores
- 0.4 rad < 9 < 0.4- rad
Dentro de estos limites las ecuaciones diferenciales
antes mencionadas son lineales
La figura 3.5 y la tabla 3.0 muestran como sen 9 y tg9
varían como una función de 9
a sen eb tag ec cose
o.o 0.1 0.2 0.3 0.4 0.5 0.6 O 9 (rad )
FIg. 3.5 Funciones sen 9, tang 9, eos
EPN

114
De la figura 3.5 podemos observar lo siguiente:
9 ( rad ) sen 9 tang 9 eos 9 9 (360°)
0
0
0
0
0
0
.1
.2
.3
.4
.5
.6
0
0
0
0
0
0
.1
.2
.3
.389
.479
.564
0
0
0
0
0
0
.1
.203
.309
. 4 2 3
.546
.684
0
0
0
0
0
0
.995
.980
.955
. 9 2 1
.877
.825
5.73 °
11.
17.
459°
189 °
22.918°
28.
34.
918°
377'
5°
11°
17°
22°
28°
34°
43'
27'
11'
55'
38'
22'
Tabla 3.0 Cuadro de valores para -0.4 rad < O < 0.4 rad
Lineal i 2 ando y simplificando las ecuaciones (3.15) y
(3.16) tenemos las siguientes expresiones:
y + L 9 - g 9 =0 (3.15.a)
M y + m I 9 - f (t) = O (3.i5.b)
X = y + L 9 (3.16)
3.1.2.C CONSIDERACIÓN PARA LA OBTENCIÓN DEL MODELO
MATEMÁTICO DEL SISTEMA.
El péndulo invertido estará sobre un carretón cuyas
ruedas ofrecerán al movimiento una oposición muy pequeña que
fácilmente será gobernada por el servomecanismo de control.
Esto nos lleva a concentrarnos en la parte inestable del
sistema ( articulación del eje del péndulo), consideremos entonces que la
masa M del carretón es despreciable en la dinámica inestable
del péndulo.
EPN

115
Las ecuaciones para obtener el modelo matemático son:
X + L 0 -g 0 =0 (3.15.a)
X = y + L 6 (3.16)
de la ecuación (3.15.a) y (3.16), despejamos el valor de
g9 y 0 respectivamente :
(3.17)[
g0 = y + I0 (3.18)
la ecuación (3.17) en (3.18), tenemos:
g~ ( x - y ) = y + 19 (3.19)
la ec. (3.16) le derivamos respecto al tiempo dos veces
d2x d2y d2 9= + (3.20)
dt dt dt
es decir:
X = y + 10 (3.21)
substituyendo (3.21) en la ecuación (3.19) tenemos :
9X = — (x-y ) (3.22)
EFN

116
3.1.2.d DESCRIPCIÓN EN EL ESPACIO DE ESTADO.
Una vez obtenidas las ecuaciones diferenciales,
elegimos las dos variables de estado para la ecuación de
segundo orden, de la siguiente manera:
X-| = X desplazamiento o posición
X2 = X velocidad.
Entonces la ecuación (3.22) queda en términos de las
variables de estado como:
= ^2
X2 = — ( X1 -y (3.23)
X-, = O XT + 1 X2 + Oy
O X 2 - — y (3.24)
Y que se expresa matricialmente, a continuación:
*1X2
=0 1
g/L o X2+
0
-9/L
(3.25.a)
Que se puede resumir como; según ya indicamos: (Cap
Numeral 1.2)
X = AX + B U
EPN

117
en la que:
X = es el veclor columna 2 x 1de variables de estado
O
g/L
matriz 2 x 2 decoeficientes de la planta.
X =
B =O
-9/L
es el vector estado 2 x 1
matriz de control 2 x1
De este modo,la matriz del sistema ya señalada es:
O 1
(3 .25.b)
La ecuación característica puede obtenerse a partir
del determinante de ( X I - A ) como sigue:
det
O 1
9/L
( X 2 - g /L)
( X 2 - g /L)
EFN

118
La ecuación característica indica que hay dos raices,
una raiz en X= *v Q/\_ y otra en X = - \_
Evidentemente el sistema es inestable, pues hay una
raiz en la parte derecha del plano, (según lo explicado en el Cap I,
numeral 1.10) tenemos que:
La respuesta transitoria de un sistema es de la forma
general y (t) — Ae - + Be 2 , puesto que uno de los valores
es positivo la salida aumenta con el limite final.
Entonces el sistema es inestable, esto nos hace
suponer que el péndulo invertido no se balanceará por si
mismo.
El sistema de control puede diseñarse de tal forma que
si y « U (t) es un función de las variables de estado resultará
un sistema estable,
El diseño de un sistema estable de control con
re alimentación se basa en la selección adecuada de una
estructura del sistema de retroalimentación, por tanto,
considerando el control del carretón y el péndulo invertido
inestable, debemos medir y utilizar las variables de estado
del sistema con el objeto de controlar el carretón. Por esto,
si deseamos medir la variable de estado X1 puede usarse un
potenciómetro conectado a las articulaciones del eje del
péndulo, en forma semejante podemos medir la relación del
cambio de ángulo, X2 , usando un tacómetro. Si se miden las
dos variables de estado, entonces pueden utilizarse en un
regulador de retroalimentación de tal forma que U = - k x,
donde k es la matriz de retroalimentación. Como el vector
de estado X representa el estado del sistema, el
conocimiento de X(t) y de las ecuaciones que describen la
dinámica del sistema proporciona suficiente información para
el control y estabilización del mismo.
La señal de control U(t) es la posición, la velocidad y
aceleración del carretón son funciones derivables de U(t).
EPN

119
g/L
U(t) (3.26)
El sistema tiene la ecuación característica X2 - g/j
con una raíz en la parte derecha del plano S . Para
estabilizar el sistema se aplicará el método de diseño antes
mencionado como es la Realimentación de variables de estado,
si los estados del sistema son conocidos { corriente,
voltaje, desplazamiento, velocidad ) , estos estados pueden
ser usados para generar entradas de control capaces de
estabilizar el sistema inestable.
3.2 CQNTRGLRBIUDRD
El chequeo de la controlabilidad de la planta
garantiza que los resultados que se obtienen serán totalmente
valederos. Esto debería hacerse aunque se conozca que la
planta física es Controlable, ya que el modelo matemático del
péndulo invertido se linealizó y puede ser que se haya
destruido esa propiedad.
Un sistema es controlable, según se vio en 'la sección
2.1.2 si la matriz es n x n.
Me = [ B AB A2B (3.27)
para nuestro caso n= 2
Me = [ B AB
EFN

120
B =
AB =
0
9/L
0
-9/L
0
-»,L
1
0
1
0
0
-9/L
-v0
Por tanto:
Mc=
O -9 /L
-g/L odet (Me) = O
del ( O - g2/!2) = O
Me es una matriz no singular.
El sistema es Controlable.
Si el sistema es controlable Me. Me"1 = i
McMc-1=
O -9/L
-9/L
O -l/g
-i/g o
-9/L
O -l/g
-i/g o
1 O
O 1
EFN

121
3.3 POLOS DEL SISTEMñ EN LRZO ñBIERTO
(Sin Realimentación de Estado). Y el polinomio característico.
Se conoce que los polos del sistema son valores
propios de la matriz A de estado; además se sabe que estos
son siempre los mismos aunque esta matriz este representada
en cualquier base. Para el cálculo de los valores propios se
usa el método explicado en el capitulo anterior:
det [ X l - A ] = 0 se obtienen los polos del sistema,
O 1
9/j O
[ X I - A ] =
X
det ( X 2- 9/| ) = O
X2- g/| = O
Una vez conocidos los valores propios de A, que son
las raices del polinomio característico, fácilmente se pueden
hallar los coeficientes de dicho polinomio.
Polinomio característico de lazo abierto, se lo
representa mediante la siguiente ecuación:
D(s)= a1+a2S+a3S2+a4S3 + ....+ an
donde D(s) = ( s- ) (
sn.
2- 9
(3.28)
EPN

122
D(S) - S2- 9/|
Los coeficientes de este polinomio son :
ai = ~ 9/1
a2 = O (3.29)
a3 = 1
La función de transferencia en lazo abierto G(s) es:
-89G(s) =
- g/i
3.4 MfiTRIZ DE TRRNSFORMRCION R URRIñBLES DE FRSE.
Un sistema que este representado por variables de
estado, se puede transformar a variables de fase para hacer
los cálculos de realimentación de estado y entonces volver a
transformar los coeficientes a la representación original.
Dicha transformación puede hacerse mediante lo visto
en la sección 2.1.4 y se reescribe a continuación:
La transformación lineal de semejanza usada es:
X = P X f - (3.30)
o ya que P es no singular,
Xf = P -1 X (3.31)
En términos de la matriz de transformación P, las
matrices de las ecuaciones de estado y de salida en variables
de fase quedarían:
A = P-1 A P (3.32)
EPN

123
bf = P-1 b (3.33)
( Cf )T = CT P (3,34)
Además los coeficientes de realimentación en variables
de fase y en su representación original son descritos por las
ecuaciones siguientes:
(Kf)T = KT P (3-35)
yKT = P-1 ( Kf )T {3.36}
De aqui que una vez conocida la matriz P el problema
de la transformación está resuelto completamente.
Si se conocen los coeficientes del polinomio
característico de A, entonces, como se vio en la sección
2.1.4, se puede calcular P desarrollando un algoritmo simple,
en que los vectores columna Pi, están definidos por la
fórmula de recursión siguiente:
Caso General
Pn = b (3.37)
pn-i = A pn-i +1 +a n-i+1 b
donde i = ......n-l
entonces P está dada por:
P = [P! P2 .... Pp] (3-38)
Para nuestro caso n=2
1=1
entonces:
P2 = b ,
P1 = A P 2 + a 2 b ,
[ El índice T se usa para indicar cantidades en variables de fase.]
EPN

A =
B —
124
P =
O
-9/L
-9/L
La matriz de transformación P, está dada por:
p =
P =
O -9/L
(3.39)
3.5, ñNRLlSIS Y/O DISEÑO CON RERLIMENTRCION DE ESTñDO.
Cuando la planta está representada por variables de
fase, se pueden obtener los resultados que se necesitan y se
verán en forma directa. Para ilustrar esto, se presenta una
síntesis del estudio hecho anteriormente. Considérese la
función de transformación de lazo abierto.
G(s) = m < na1 +a2S +Sn
que en variables de fase toma la forma
(3.40)
EFN

125
Xf(t) = Af Xf(t) + bf U(t)
y(t) = (C*)T X'(t)
(3.41)
(3.42)
donde :
0 1 0 ... 0
0 1 0 ... 0
0 0 0 ... 1
-a .| -a2 -a3 ... -an
0
0
0
1
C1
C2
cm
0
Cuando hay realimentación de estado, la expresión
para la entrada de control es:
U(t) = K [ r(t)-(kí)T (3.43)
en donde kf es el vector de coeficientes de
realimentación en variables de fase ; entonces la
representación del sistema viene a ser:
0
0
0
-(a1+Kkl<
1
1
0
) -(a2+Kk2f) -(a
0
0
1
n+Kknf)
f
.0
0
0
1
(3.44.a)
EPN

126
y ( t ) -K [ C1 Cm O O ] tf(t) (3.44,b)
Entonces la f u n c i ó n de t r a n f e r e n c i a con
realimentación de estado dado por:
Y(s) K(C1 +C2S+. ..... + CmSm~1 )(3.45)
R(s) (ai+Kk^) + (a2+Kk2f)S + ..... + (an+Kknf)Sn-1 + Sn
Los coeficientes de denominador de Y(s) / R(s) pueden
escribirse en forma de ecuaciones como sigue :
= a+Kk f i=1,2,....,n (3.46)
entonces:
Y(s) K (C1+C2S+ .+ CmSm-1 )= (3.47)
R(s) ak-i+ ak2S + + aknSn'1 + Sn
De aquí, para el caso de análisis, si se conocen Ky
K*, se pueden determinar directamente Y (s) / R/S\
Para diseño en cambio, si se conocen las aj, y los a ¡,
se pueden determinar Ky k* directamente.
Para obtener una solución única de K y k f, se hace el
error igual a cero, cumpliendo la siguiente condición;
ak1K= (3.48)
C1
Además en la sección 2.1.5 la función de transferencia
equivalente de realimentación, H e q , se puede hallar
fácilmente en términos de variables de fase, según la
ecuación 2.44 que se reescribe:
EPN

127
k f S
C S
(3.49)
es necesario chequear la validez de los resultados
obtenidos, encontrando:
£ = máxaki ai
(3.50)
Que viene a ser el error normalizado, nos nada una
idea de la precisión de los resultados; este error puede ser
usado por la determinación de la validez de los cálculos, si
se los hace cuando exista incontrolabilidad numérica.
A continuación se presenta el ya explicado método que
logra situar los polos de la función de transferencia según
las especificaciones que se desean en el problema en estudio.
Para estabilizar el sistema generaremos una señal de
control que sea función de las dos variables de estado X-) y
X2, entonces tenemos:
U (t) = - k X
U(t) = [-^ -k (3-51)
Sustituyendo esta relación de la señal de control en
la ecuación:
O 1
9/L
U(t)
-9/L
tenemos:
EPN

128
*1
X2
=
0 1
0/L ° X2
+
-9/L ( - k1 X1 " k2 X2
Combinando los dos términos de suma en la parte
derecha de la ecuación encontramos:
9/L 9k2/L
Por tanto, obteniendo la ecuación característica
encontramos los polos del sistema:
det I - (A -B K) ] = O
Es necesario conocer la configuración de la matriz k.
Los valores propios del sistema pueden ser localizados en
cualquier lugar del plano complejo.
A - BK
X !-( A - BK )=
X
-9/L<
-1
det [ X I-(A -BK)] = X 2 - X gk2/L - g/L<1+ki) = O (3.52)
Para que el sistema sea estable, necesitamos que
9k2/L< O Y k1< ~^ -^s^- ^ernos estabilizado el sistema inestable
midiendo las variables de estado X-| y X 2 y usando la función de
EFN

1Z9
control U = k-jX-j + k2x2 para obtener el sistema estable .
Si el sistema es controlado, los polos del mismo se
sitúan, en el eje real en la parte negativa de este, en este
caso se tiene 2 polos negativos en el mismo punto sobre el
eje real.
En X = -h está el valor deseado para obtener lazo cerrado.
( X + h ) = X 2 + 2 X h + h2 (3.53)
igualando las ecuaciones 3.52 y 3.53 tenemos :
2h = - gK2/L
k2 = -2hL/g
h2 = -g/L (1 + M
k! = - (1+ h2L/g)
tenemos:
= - (U
k2 =
Entonces la matriz k de realimentación será:
k = [ - (1+ h2L/g) -2hL/g ] (3.54)
Y en variables de fase :
Kf = [ h2+ L/g 2h ]
k-j y \<2 corresponden a un sistema controlado con una
respuesta criticamente decreciente .
EFN

130
3.5.1 PUNTO DE EQUILIBRIO CON LA REALIMENTACION DE
ESTADO
Tenemos ia ecuación matricial :
*1X2
=0 1
9/L ( 1 + k! ) Sk2/L
Xi
X2
X-j = X2
9/L(
si X-j = O
X2 = O
si X2 - O
9/L ( 1 + k1 )
g/L ( 1 + ki )
X-, = o
El punto de equilibrio está en :
X-, = O
X2 = O
posición igual a cero
velocidad Igual a cero
EFN

131
3.6 O B S E R U R B Í L I D ñ D .
Para determinar si la planta es Observable el rango
de la ecuación:
Rango Mo = Rango [ CT A?CT (AT)2CT ... (A*)"-p CT ] = n
Donde n es la dimensión de la matriz A y p es la
dimensión de Y ( matriz de salida )
Tenemos n = 2 p = 1 :
C= [1 0 ]
Por lo tanto:
CA = [ 1 O ]
O 1
-g/i o
det [CT (CA)T]
1 o
o 1
det [C T (CA)?] « 1
La planta es Observable.
3.7 RESUMEN GENERRL DE ECURCIONES.
Todo el proceso se concreta en el siguiente
cuadro de ecuaciones:
a. Estudio de la Planta
1.- Matriz A de la planta:
EPN

132
O 1
9/1 O
2, - Polinomio característico de lazo abierto
D(s) = s2- g/i
cuyos coeficientes son: a-j = - g/la 2 = O
(3.55)
(3.56)
3 . - Matriz de transformación P.
, OP9= b =
P = A P
-g/L(3.57)
4.- Función de Transferencia en Lazo Abierto .
G(s}=a1 +a2S + ..... ..-
m < nSn
{3.58}
para el sistema:
- 89G(s) = (3.59)
b. Realimentación de estado
5 . - Vector de Realimentación de estado K
CPN

133
K2 = - 2 h I/g (3.60.a)
donde h = lugar geométrico deseado de raíces en el eje real del plano S
En variables de fase
k^ = h2 + g/|
k2f = 2 h (3.60.b)
6 t _ Coeficientes del Polinomio característico de lazo cerrado
ak-j = a^ + Kk-( f
ak2 = Kk2f (3.61)
7.- Función de transferencia con realimentación de estado, el lazo cerrado
Y(s) K ( C1+C2S+ + CmSm-1 )
R(s) ak1+ ak2S + + aknSn-1 + Sn
para el sistema :
Y(s) -89 K(3.62)
R(s) ak-i+ ak2S + S2
8 . - Función de transferencia equivalente con realimeníación de estado.
k2fS +......+ Knf S
C S
para e! sistema :
k^ + k2 fS
Heq =-89
EPN
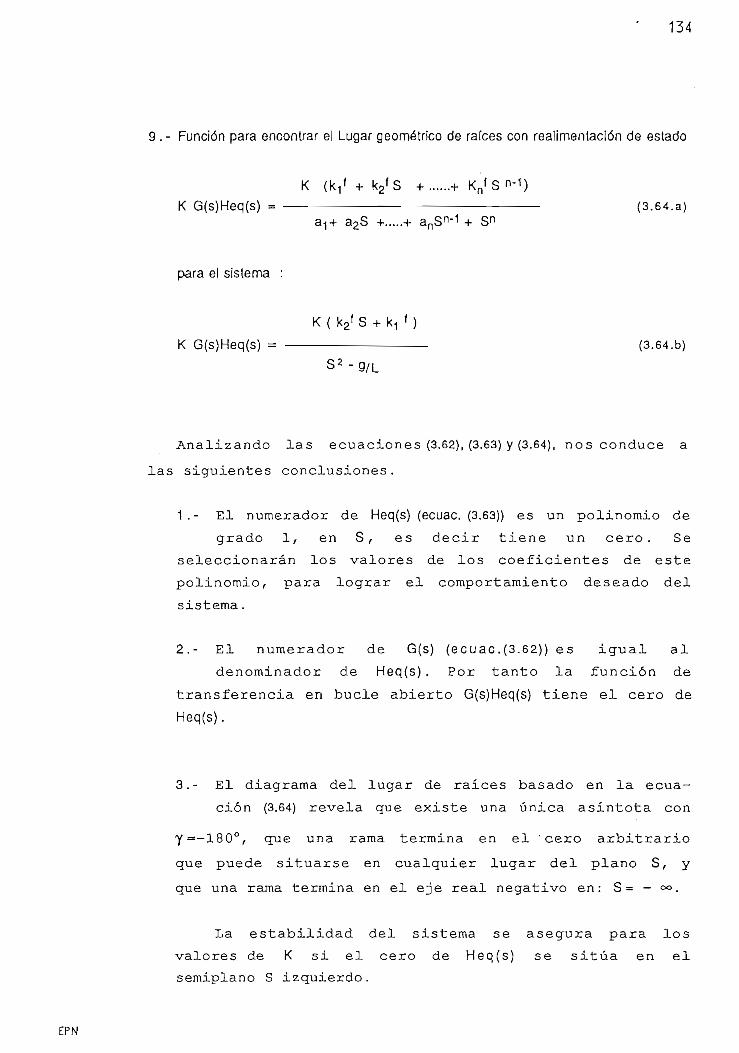
134
9 .- Función para encontrar el Lugar geométrico de rafees con realimenlación de estado
K (k^ + k2fS + ...... + Kn'S n~1)
K G(s)Heq(s) = - (3.64.a)3-! + a2S +.....+ anSn-1 + S"
para el sistema :
K ( k2f S + K! f )
K G(s)Heq(s) = - (3.64.b)
s 2 - g / L
Analizando las ecuaciones (3.62), (3.63) y (3.64), nos conduce a
las siguientes conclusiones.
1.- El numerador de Heq(s) (ecuac. (3.63)) es un polinomio de
grado 1, en S, es decir tiene un cero. Se
seleccionarán los valores de los coeficientes de este
polinomio, para lograr el comportamiento deseado del
sistema.
2.- El numerador de G(s) (ecuac.(3.62)) es igual al
denominador de Heq(s) . Por tanto la función de
transferencia en bucle abierto G(s)Heq(s) tiene el cero de
Heq(s).
3. - El diagrama del lugar de raices basado en la ecua-
ción (3.64) revela que existe una única asíntota con
y =-180°, que una rama termina en el ' cero arbitrario
que puede situarse en cualquier lugar del plano S, y
que una rama termina en el eje real negativo en: S = - °o.
La estabilidad del sistema se asegura para los
valores de K si el cero de Heq(s) se sitúa en el
semiplano S izquierdo.
EPN

135
4. - La realimentación por variables de estado ofrece la
facultad de seleccionar la posición del cero de
G(s) Heq(s), como se da en la ecuación (3.62), con el
fin de situar los polos del sistema en bucle cerrado
allí donde nos convenga.
5. - Al sintetizar la razón deseada Y(s)/p/s\e
observarse la siguiente limitación: el número de
polos menos el número de ceros de Y(S)/R(S\e ser igual
o menor que el número de polos menos el de ceros de G(s).
3.8 EL ñCTUñDOR
3.8.1 INTRODUCCIÓN
Nuestro diseño necesita de un servomecanismo al que
lo llamaremos ACTÚA DO R. El objetivo del mismo, es hacer un
control sobre la posición y velocidad de la planta (péndulo
invertido) , tal como se lo ha planteado al inicio de este
capitulo { numeral 3.1 )
Sabemos que un servomecanismo es un sistema de
control realimentado en el cual la variable controlada es la
posición mecánica, la velocidad u otra característica de
posicion-tiempo de un eje mecánico. Está constituido por
componentes electromecánicos y electrónicos combinados en tal
forma que proporcionan la función de control deseada.
En la fig 3.6 mostramos la configuración típica de un
servomecanismo. En donde la linea continua indica una señal
eléctrica, en cambio la línea de segmentos indica una señal
mecánica.
EPN

136
Señal deEntrada
Comparador
-i-£ )—^-
SeñalRea lirr
Amplif icac. Servomotor
dei - /lentacion
Seña 1
Transductorde
Realimentacion
Señal
iiil
, i
j Se~~*~ MeMecánica
E l éc t r i ca
3 . 6 Diagrama de la configuración de un servomecanismo.
3.8.2 FUNCIÓN DE TRANSFERENCIA DE LOS COMPONENTES
DE SERVOS DC.
3.8.2.a MOTOR
El motor D.C es una de la primeras máquinas para
convertir la potencia eléctrica en potencia mecánica, en
general se los prefieren en sistemas D.C.
En el campo de la instrumentación el más común de los
servomotores D.C, emplea un campo fijo en imán permanente y
la potencia de control se suministra a la armadura. El torque
del rotor bloqueado es proporcional a la corriente de
armadura debido a su campo magnético fijo, la velocidad sin
carga del rotor es proporcional al voltaje aplicado.
Para llegar a la función de transferencia conviene
describir las ecuaciones del motor.
3.8.2 .a.1 ECUACIÓN ELÉCTRICA
Un modelo del circuito eléctrico equivalente del
motor muestra en la figura 3.7, en donde R-] representa las
pérdidas de circuito magnético, sinembargo en la operación
del motor es insignificante por ser más grande que la
EPN

137
resistencia de la armadura Ra, La es inductancia de la
armadura.
la
Ea
Ra
íi a aLa
Rl
^Eg
Flg 3.7 Circuito equivalente del motor
La ecuación que rige al circuito es
Ea = La + (3.65)
Donde Eg es la fuerza contraelectromotriz inducida
f.c.e.m., que aparece en los terminales de armadura como un
voltaje generado internamente, y es proporcional a la
velocidad del motor w:
Eg = KQW (3.66)
Donde Ke es la constante de fuerza contraelec-
tromotriz . Combinando las dos ecuaciones anteriores se
obtiene la ecuación eléctrica del motor, y es la siguiente:
Ea = La Raa W (3.67)
3.8.2.3.2 ECUACIÓN DINÁMICA
Si consideramos que el campo magnético en el motor
es constante, el torque producido es proporcional a
la corriente como:
= Kt a (3.68)
EPN
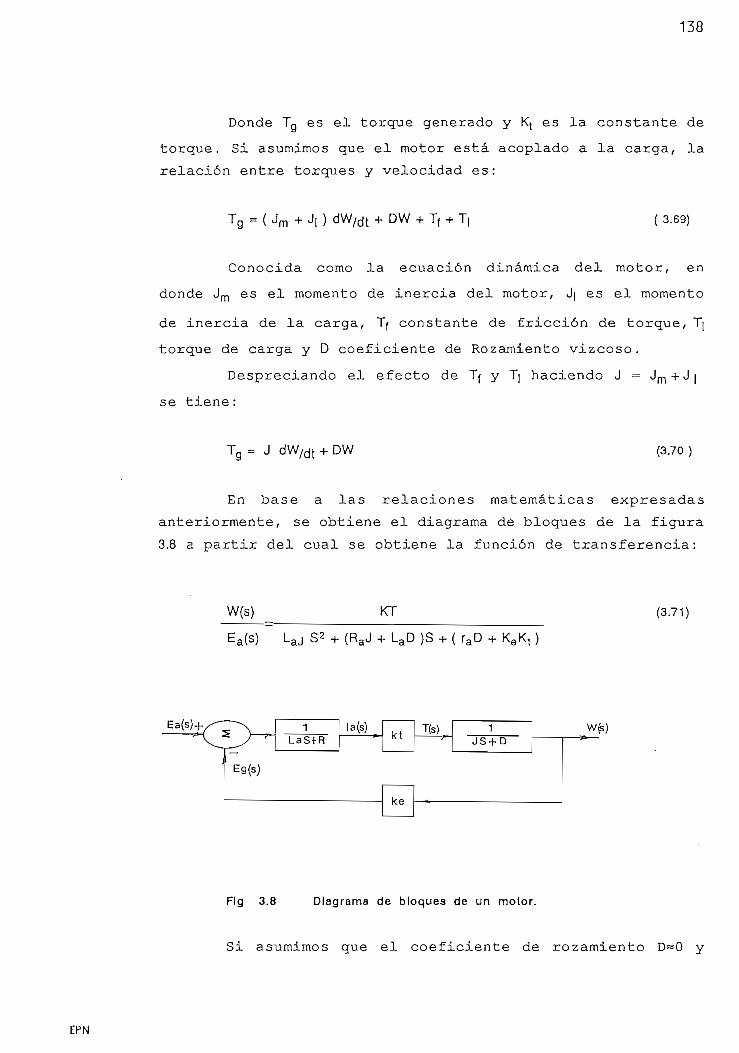
138
Donde Tg es el torque generado y Kt es la constante de
torque. Si asumimos que el motor está acoplado a la carga, la
relación entre torques y velocidad es:
Tg = ( Jm ) dW/dt + DW + TÍ + T| 3.69)
Conocida como la ecuación dinámica del motor, en
donde Jm es el momento de inercia del motor, J| es el momento
de inercia de la carga, Tf constante de fricción de torque, TI
torque de carga y D coeficiente de Rozamiento vizcoso.
Despreciando el efecto de Tf y T¡ haciendo J = Jm + J |
se tiene:
Tg = J dW/dt + DW (3.70
En base a las relaciones matemáticas expresadas
anteriormente, se obtiene el diagrama de bloques de la figura
3.8 a partir del cual se obtiene la función de transferencia:
W(s)
Ea(s)
KT
(RaJ + LaD )S + ( raD + KeKt
(3.71)
Ea(s)+.S I A.
Eg(s)
1LaSíR
la(s) T(s) 1JS+D
W
Fig 3.8 Diagrama de bloques de un motor.
Si asumimos que el coeficiente de rozamiento D=0 y
EPN

139
resolvemos la ecuación:
S2 !a J + RaJ S + KQKt = O
-RJ ± V(RJ)2 - 4 LJ KeKt
S = (3.72)2LaJ
En la práctica La es pequeña, asi que:
(RJ) 2 - 4 L J KeKt > O
Aplicando la aproximación, donde X es pequeña
Vi- X~ = 1 - X/2 ; (3.73)
La aproximación de :
RJ ( 1 - 4 LaJ KeKt / R = RJ ( 1 - 2 LaJ KQKt / R2j )
Sustituyendo da:
La función de transferencia puede ser escrita como :
- RJ + RJ ( 1 - 2 LaJ KeKt / R2J ) KeKt
S1 = - = - (3.74.a)
2 LaJ R J
- RJ - RJ ( 1 - 2 LaJ KeKt / R2J ) R
S2 = = (3.74.b)
2 LaJ La
La función de transferencia puede ser escrita como:
w(s) 1/Ke
Ea(s) (STm + 1 ){ STe + 1 ) (3.75)
Donde:
EPN

140
TQ = La / R es la constante de tiempo eléctrica
Tm = R J / KeK( es la constante de tiempo mecánico
3.8.2.3.3 FUNCIÓN DE TRANSFERENCIA REAL DEL MOTOR
Para determinar las características del sistema, nos
conviene encontrar la función de transferencia del motor bajo
las condiciones reales de trabajo, pues las mediciones
realizadas ( ver apéndice A ) de cada uno de los parámetros
separadamente, cumplen en su conjunto una función diferente a
la que se presenta en la realidad. Diferencias que se deben
porque cada parámetro es tomado a diferentes condiciones;
porque no se han tomado en cuenta los efectos existentes; o
porque el motor presenta no linealidades marcadas en cierto
rango de voltaje de entrada.
Aplicando el criterio de polos dominantes la función
del motor se la puede aproximar a una de primer orden, pues
la constante eléctrica resulta despreciable frente a la
constante mecánica, en la ecuación (3.76).
K 1 /T e 1 /T m
G(s) =
/O i Hfr W Qi_ 1/'T \} 7R\o el mismo valor inicial y f inal de la
función de segundo orden se tiene :
K 1/Tm
G(s) =
(S + 1/Tm ) (3.77)
Para encontrar la constante mecánica se obtiene las
EPN

141
características velocidad versus tiempo del motor, como se
muestra en la fig. 3,9 en donde Tm se calcula a partir del 63 %
del valor final de la salida. Si consideramos R(s) = 1/s
función paso ( voltaje de entrada }, tenemos :
Y(s)
R(s)
K 1/Tm
(S + 1/Tm
K 1/TmY(s) = R(s)
1/Tm
en el dominio del tiempo :
K t
y(t) = +e
si t = Tm tenemos :
K _ i
y(t) = (1 +e ) = KT ( 0,63212 )
K
y(t) = - x 63,21 %
0.63 k
W rad.sg
t(seg)
Flg. 3.9 Característica del Servomotor Velocidad versus Tiempo
EPN

142
Para encontrar el valor de la ganancia K, se tomarán
algunos valores de velocidad para diferentes voltajes de
entrada, y con ello conformar una tabla.
Vin (v) W(rad/s) K (rad/Vs)
3.8.2.b TACOMETRO
En nuestro diseño necesitamos un generador eléctrico;
este es un dispositivo que convierte energía mecánica en
eléctrica por medio de la inducción electromagnética.
El generador es usado en servomecanismos y otros
sistemas de control, como un transductor para dar una señal
de voltaje proporcional a la velocidad, en este caso el
generador se denomina tacómetro ( es el transductor de realimentacíón; mide
la respuesta del servomecanismo en su eje de salida y la convierte a la señal eléctrica
correspondiente, ver f igura 3.6 }
Mejora la estabilidad del sistema. Tiene un elevado
grado de linealidad entre la tensión y la velocidad del eje
de rotación.
En el péndulo invertido el tacómetro va a convertir
en voltaje (tomado desde el controlador) el despla^amiento x del carro.
El tacómetro tiene el bobinado acoplado al mismo eje
de armadura del motor, sabemos que el f lujo de campo es
constante y por consiguiente el voltaje es proporcional a la
velocidad angular, es decir :
E g ( s ) = KgW(s) (3.79.a)
La función de transferencia es :
EPN

143
Kg =E9(s)
W(s )(3.79.b)
donde:
Kg = constante de voltaje del generador
La figura 3.10 muestra la variación de Eg con respecto a
W, la pendiente de la recta, nos da el valor de Kg.
Eg • •
Flg. 3.10 Característica del Tacómetro Voltaje generado
versus velocidad angular.
Con la realimentación de velocidad incrementamos la
estabilidad del sistema, además podemos controlar la
respuesta del sistema cambiando el valor de Kg, cuando Kg es
pequeño el sistema puede ser inestable o subamortiguado, y
cuando Kg es grande incrementa el sistema viene hacerse más
amortiguado.
3 . 8 . 3 . DISEÑO DEL AMPLIFICADOR DE POTENCIA
3.8.3.a INTRODUCCIÓN
En nuestro diseño tenemos que acoplar la salida del
operacional con el sermovomotor (ver figura 3.11) . La potencia
EPN

144
de salida del primero es insuficiente para alimentar al
servomotor.
R l
.P^'^
B SERVOMOTOR
Amplificadorde Potencia
Fig 3.11 Amplificador de potencia
En este caso es necesario diseñar el amplificador de
potencia que tiene las siguientes características :
V,outconstante = 1 ganancia de voltaje
V int
'out
'int
> 1 mayor a 1 ganancia de corriente
'¡nt
'int
vount
'out
3.8.3.b AMPLIFICADORES DE POTENCIA
Los amplificadores de potencia están destinados a
proveer grandes potencias de salida y por tanto la ganancia
de tensión solo desempeña un papel secundario. Normalmente,
EPN

145
la ganancia de tensión de una etapa de potencia de salida es
casi igual a la unidad y la ganancia de potencia es, pues,
principalmente debida a la ganancia de corriente del
circuito. La tensión y la corriente de salida deben ser
capaces de asumir valores positivos y negativos.
3.8.3.C SEGUIDORES DE EMISOR COMPLEMENTARIOS
Con tensiones de entrada positiva, TI funciona como
seguidor emisor y T2 está polarizado inversamente; lo
contrario ocurre con la excitación negativa.
lout
Vout
-Vcc
Fig 3.12 Seguidor emisor complementario
Ganancia de tensión
Ganancia de corriente
Potencia de salida
Av
Ai =
P, = -
= 1
Vcc2
2 Rl
(3.80)
Los t r ans i s to re s conducen as i corr iente
alternativamente, cada uno durante un semiperiodo. Este modo
de funcionamiento se denomina push-pull clase B.
Para Vin = O, ambos transistores están en corte y por
tanto no fluye corriente estática en el circuito.
EPN

146
La corriente tomada de la alimentación positiva y
negativa respectivamente, es la misma que la corriente de
salida. Por tanto el circuito tiene el rendimiento
considerable mejor que el del seguidor emisor normal.
Una ventaja es que, con cualquier carga, la salida
puede ser excitada entre ± Vcc ya que los transistores no
limitan la corriente de salida.
La diferencia entre la tensión de entrada y la
tensión de salida está determinada por la tensión base-emisor
del transistor que conduce la corriente. Únicamente cambia, y
por consiguiente Vin « Vount , y es independiente de la
corriente de la carga.
La máxima potencia de salida de potencia está
determinada por las corrientes de pico permisible con la
máxima disipación de potencia de los transistores.
Vb
P|2 RI
(3.81)
La disipación de potencia de los transistores alcanza
su valor máximo no con la plena excursión de la tensión de
salida.
Vcc
Fíg. 3.13 Curvas de Potencia
1 Potencia total tomada de la fuente de alimentación
2 Potencia de salida
3 Disipación de potencia de cada transistor

147
3.8.3.d SEGUIDORES DE EMISOR CLASE AB COMPLEMENTARIOS
La característica de transferencia Vo = Vo (Vint) cerca
de la tensión cero la corriente en el transistor polarizado
en sentido directo se hace muy pequeña y la impedancia del
transitor aumenta. La tensión de salida en la carga ya no
cambia linealmente con la tensión de entrada, y esto se
traduce en un codo en la característica, cerca del origen,
lo que da lugar a distorsión de la tensión de salida,
denominada distorsión de cruce.
Vcc
vinvm
-Vcc
Cruce o paso por cero enfuncionamiento push-pullclase B
vm
Cruce o paso por cero enfuncionamiento push-pullclase AB
Realización de la operaciónclase B utilizando dos ten-siones auxiliares.
Vcc
vm
-Vcc
Realización de la operaciónclase AB utilizando unasola tensión auxiliar.V3 = V-j + V2 = 0.7 volts
Fig. 3.14 Cruce o paso por cero en funcionamiento A, AB.
EPN

148
Para la clase AB el funcionamiento push-pul! tiene una
distorsión de cruce tan pequeña que fácilmente puede ser
reducida a valores tolerables.
El problema principal de la operación o
funcionamiento clase AB consiste en mantener constante la
corriente estática necesaria en un amplio margen de
temperatura.
Cuando los transistores se calientan, la corriente
estática puede aumentar a su vez y finalmente provocar la
destrucción de los transistores.
Este es el efecto denominado realimentación térmica
positiva. El aumento de la corriente estática se puede evitar
si cada una de las tensiones V1 y V2 se reducen en 2mv por
cada grado de aumento de temperatura. Para este propósito se
pueden emplear diodos o termistores montados en los
radiadores de calor de los transistores de potencia.
Sin embargo, la compensación de temperatura nunca es
absolutamente perfecta ya que la diferencia de temperatura
entre la unión y la cápsula suele ser considerable. Por
consiguiente se requiere la estabilización adicional
provista por los resistores R1 y R2 que producen realimentacion
serie.
Como los resistores están conectados en serie con la
carga, reducen la potencia de salida disponible y por tanto
deben ser pequeñas comparados con la resistencia de carga.
Este dilema de puede solventar utilizando circuitos
Darlington.
3.8.3.6 SEGUIDORES DE EMISOR COMPLEMENTARIOS
EMPLEANDO CIRCUITOS DARLINGTON
Con los circuitos descritos hasta aqui se pueden
obtener corrientes de salida de hasta algunos centenares de
miliamperios. Con corrientes más altas de salida se emplean
transistores que tengan relaciones de transferencia de
corrientes más elevada.
EPN

149
Pueden consistir en dos o más transistores individuales
funcionando en conexión. Darlington e incluso en conexión
Darlington complementaria.
El circuito básico es el representado en la figura 3.15
donde los pares de transistores T1 y TV y T2, T21 están
conectados en Darlington.
El a jus te de la corriente estática presenta
dificultades ya que ahora se deben compensar cuatro tensiones
base-emisor dependientes de la tempera tura . Estas
dificultades se pueden eludir haciendo que la corriente
estática sólo fluya a través de los transistores excitadores
T l y T 2 . Entonces los transistores de salida sólo conducen
con corrientes de salida más intensas. Para conseguir esto
se selecciona la tensión de polarización V1 de modo que
aparezca una tensión de aproximadamente 0.4 voiis entre los
extremos de cada uno de los resistores R1 y R2; asi :
V1« 2 (0.4 volts + 0.7 volts ) = 2.2 volts.
Entonces para la entrada cero los transistores
desalida no tienen virtualmente corriente incluso con las
temperaturas de unión más altas.
Con corrientes de salida más altas las tensiones
base-emisor de los transistores de salida aumentan hasta
aproximadamente 0.8 volts esto limita la corriente que pasa por
R1 y R2 hasta el doble del valor estático y, por tanto, la
mayor parte de la corriente de emisor de los transistores
excitadores queda disponible como corriente de base para los
transistores de salida.
Los resistores R1 y R2 también descargan la base de
los transistores de salida. Cuanto menor es su resistencia
más rápidamente pueden ponerse en estado de corte los
transistores de salida. Esto es particularmente importante
cuando cambia la polaridad de la tensión de entrada, ya que
un transistor puede conducir antes de que el otro quede en
estado de corte. De esta manera puede fluir una corriente muy
EPN

150
vcc
-vcc
Fig. 3.15 Conexión Darlington Complementaria
intensa a través de ambos transistores de salida y la
segunda ruptura resultante los puede destruir inmediatamente.
A veces es preferible utilizar en la salida transistores de
potencia que sean del mismo tipo. En tales casos el
circuito Darlington T2, T21 de la figura 3.15 se substituye por
la conexión Darlington complementaria.
3.8.3.f LIMITADOR DE CORRIENTE
Debido a su baja resistencia de salida, los
amplificadores de potencia se pueden sobrecargar fácilmente y
en consecuencia quedar destruidos. Es pues aconsejable
limitar la corriente de salida a un valor máximo definido por
un circuito adicional de control. La fig 3.16 muestra una
solución particularmente sencilla. El limite se alcanza
cuando el diodo D3 o D4 conduce, ya que la tensión entre los
extremos de R1 o R2 no pueden aumentar más .
Es evidente que las tensiones directas y VD^ de
EPN

151
v i n t vout
-vcc
Fig. 3.16 Limitador de corriente.
VD3-VB E1
'+omáx -•
omáx =V D 4 - V B E 2
R2
(3,82)
los diodos deben ser mayores que VBE ~ 0,7 volts . Esto se puede
conseguir mediante varios diodos de silicio conectados en
serie.
3.9 ESTUDIO DEL RCTURDOR EN LñZO CERRñDO.
3.9.1 INTRODUCCIÓN
La operación del actuador en lazo abierto implica que
la información de la señal realimentada es nula, y que la
velocidad del motor es regulada solo por la señal de comando.
Es decir la señal de salida deberá seguirla a la señal de
entrada deseada a lo largo de todos los componentes del
sistema que son constantes, es por ello necesario analizar el
trabajo del actuador en lazo cerrado
EPN

152
3.9.2 LINEALIZACION DEL ACTUADOR MEDIANTE EL
USO DE LA REALIMENTACION.
El péndulo invertido se halla mecánicamente situado
sobre el carro, el cual está conectado a ese Servo motor DC, tal
como lo demuestra la figura 3.17,
Flg 3.17 Conección mecánica del Servo-motor DC
El estado de salida del Observador es X, conocido
como el desplazamiento estimado de la masa del péndulo.
El Observador necesita una medida exacta de X de modo que el
Estado Estimado puede ser corregido. Por desgracia esto es
muy difícil obtener poniendo un transductor sobre la masa del
péndulo, como quiera X esta relacionada con el valor de 9 y y
por medio de la ecuación X = y + L0, como ya, se explicó
anteriormente, es medible fácilmente con un potenciómetro
puesto en la base del péndulo. Entonces, la variable X de
la planta puede ser calculada si y es medible.
El desplazamiento y del carro es necesario para
integrar el valor del voltaje desde el motor tacómetro.
Por lo antes señalado es necesario hacer el estudio
del Actuador en lazo cerrado y conocer el grado de
estabilidad del mismo, como también ese valor de X exacto,
haremos un análisis un tanto detallado del Actuador.
La función de transferencia del servomotor y
tacómetro respectivamente son:
EPN

153
G(s) = (3.83.a)
Kg (s) V(s)
W(S)
(3.83.b)
donde:
T depende de la masa de la carga, fricción, etc.
En la figura 3.18, observamos al actuado r en lazo
cerrado.
v(s) 5 ) ^ Amplificad.
8
Integrador
k'/S
_^
Motor
G(s)
Tacóme trokgS
y®.
FIg.3.18. Llneal lzación del Actuador mediante el uso de
la Reallmenlación.
En el lazo de realimentación tenemos el integrador
ideal; la función de transferencia es:
K,G(s) = (3.84)
y tiene las siguientes características:
EPN

154
-i
ot-0
\0
Gráfica Polar
Lugar Geométrico
Sistema Estable.
MMargende fase
Q d b-180°
Diagrama de Nlchols
Sistema Estable
-90°
Diagrama de Bode
FIg: 3.19 Características de un Inlegrador Ideal
De la figura 3.18 podemos obtener la ecuación del lugar
geométrico de raices en lazo abierto del actuador, sin
considerar la presencia del integrador, la ecuación G (s)H(s)
es:
EPN

155
G (s)H(s) =
donde:
(3.85)
G(s) =BKi
H (s) = Kg S
La ecuación 3.85 tiene un cero en s = 0 y un polo en s=
, el lugar geométrico de las raices de esta ecuación
es:
w
Flg: 3.20 Lugar geométrico de Raíces de la ecuac. 3.85
Actuador en lazo cerrado sin el Integrador Ideal.
Si consideramos la presencia del integrador ideal
dentro del lazo de realimentación ( ver ílg. 3.18), estamos
eliminando el cero de la ecuación 3.85, en este caso tenemos
un polo en s = ; la nueva ecuación G (s)H(s) es
G (s)H(s) =K
(3.86)
EPN

156
donde:
G(s) =
KgK2
las nuevas características del actuador, analizando
la ecuación 3.86 son:
Lugar Geométrico
Muy estable.
Margen de ganancia
Diagrama de Nichois
Estable
Diagrama de Bode
FIg: 3.21 Características del Actuador
Con este criterio, la función de transferencia de
lazo cerrado de la figura 3.18 está dada por:
EPN

157
Y(s) B G (s)
• = ' (3.87)
V(s) 1 + B G(s) K1 K2 S / S
Si B es lo suficientemente grande, y B G(s) K-j K2 es mucho más grande que
1 tenemos:
Y(s) 1= (3.88)
V(S) K1 K2
Entonces, el desplazamiento y (salida) se obtiene
como un valor proporcional al valor de voltaje desde el
controlador. Esta configuración da una ventaja a la
linealización del sistema inherente no lineal accionado por
motor.
3.10 SENSOR DE POSICIÓN
Tenemos el potenciómetro sensor de posición, en un
cilindro, cuya resistencia entre terminales es de AKO. La fig
3.22 muestra un esquema del elemento.
4- vcc
Fig. 3.22 Potenciómetro de Posición
EPN
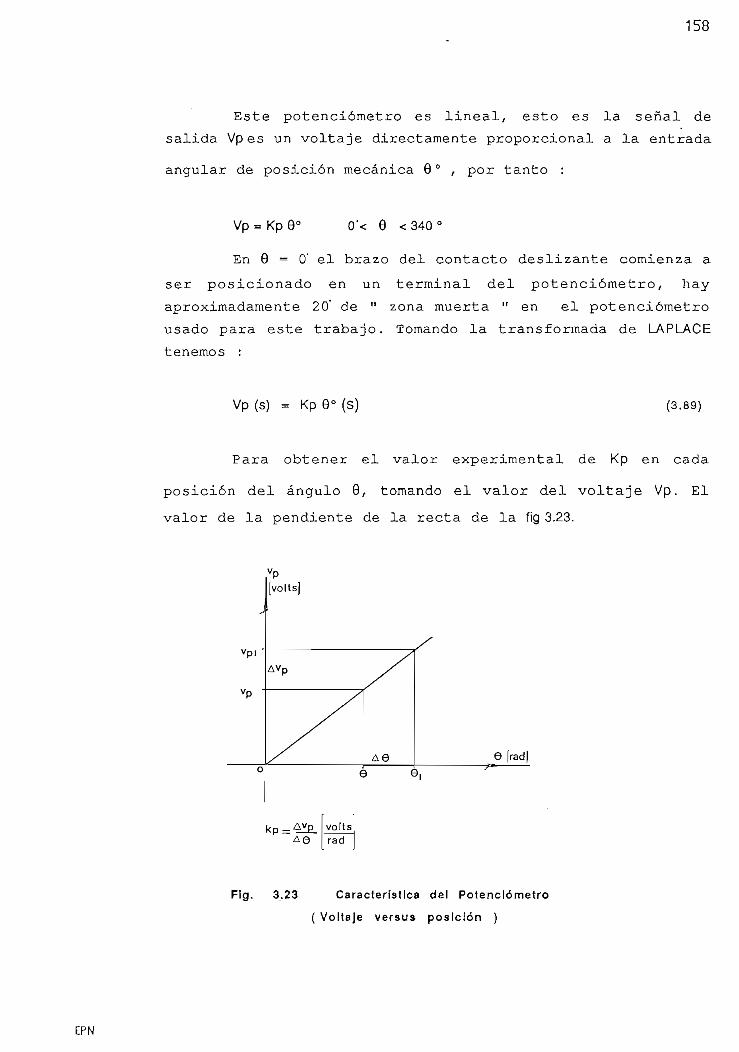
158
Este potenciómetro es lineal, esto es la señal de
salida Vp es un voltaje directamente proporcional a la entrada
angular de posición mecánica 6° , por tanto :
Vp = Kp 0C 0 <340°
En 0 = O' el brazo del contacto deslizante comienza a
ser posicionado en un terminal del potenciómetro, hay
aproximadamente 20' de " zona muerta " en el potenciómetro
usado para este trabajo. Tomando la transformada de LAPLACE
tenemos :
Vp(s) = K P 0°(S) (3.89)
Para obtener el valor experimental de Kp en cada
posición del ángulo 0, tomando el valor del voltaje Vp. El
valor de la pendiente de la recta de la fig 3.23.
J
vpi
VP
o
VP
(volts)
Avp
/kp-^R_
A0
voltsrad
A0
/
8 (rad ]
e e.
Flg. 3.23 Característica del Potenciómetro
( Voltaje versus posición )
EPN

159
3.11 ESQUEMfi DEL C O N T R O L R D O R V flCTURDOR
En la fig. 3.24 se muestra el dibujo esquemático
Flg: 3.24 Esquema Completo del Controlador y Actuador
El Estimador de Predicción está representado mediante la
ecuación 2.130.
= [ A - L C ] X + B U (3.90)
donde:
A =g/L
matriz de las característicasdinámicas del sistema, pénduloinvertido.
B -matriz de control o de constantesde la señal de entrada.
EPN

160
L =matriz L del Estimador
C = [ 1 0 ] matriz de Salida
LC =
V Velocidad
Aceleración
U- señal de control (3.91)
de la ecuación 3.90 :
*1
*2
=
0 1
g/t o
*i
X2
-
L1 0
12 0
*1
X2
+
0
-9/L
U +
L1 0
L2 0
Xi
X2
Ecuación diferencial que expresa la aceleración del sistema:
9/L U + L (3.92)
Ecuación diferencial que expresa la velocidad del sistema:
= X (3.93)
donde el valor [ X-p X-j ] = al error de estimación.
Con las ecuaciones (3.92) y (3.92) podemos dibujar el
esquema del Estimador, ver fig 3.25
EPN

161
Como podrá observarse, el estado estimado X(t) tomará
valores cercanos al estado actual X(t). El estimador tiene
además las mismas ecuaciones de estado que el sistema
FIg: 3.25 Estimador de Predicción pjira el Péndulo Inver t ido
original, y tiene como entradas las señales U(t) y X( t ) .
En la figura 3.26 se halla el esquema completo del
Actuador y Controlador en conjunto.
X M^JOOF?
FIg: 3.26 Sistema de Control para el Péndulo Inver t ido
EPN

Resultados Experimentales.
EFN

CAPITULO IV
Resultadoa Experimentales
162
4.1 CñRRCTERISTICRS DE Lfi PLRNTñ
4.1.1 VALORES Y UNIDADES [ g/l , h, I ]
Hemos estudiado la Realimentación y Estimación de
Estado (CAP I I ) f y con ello determinado las diferentes
ecuaciones matemáticas de los elementos del sistema (CAP I I I ) .
Ahora vamos a encontrar los valores físicos de los
parámetros.
La Planta está representada mediante la ecuación
diferencial.
X = A X + B U
donde :
A =
(4.1;
0 1
g/i o
B =
0
-a/,
U = [h2+g/, 2h]
(al hacer Realimentac.de Estado)
El parámetro 9/|, al igual que h y l son variables
encontradas en el diseño de este sistema de control. En el
apéndice B está detallado el proceso de obtención de los
parámetros y los valores físicos de estos.
h = 0.7 [1/Sg]
g/| = 89 [1/sg¡
I = 11 [cm]
K =1.5
( Lugar de las raíces en el eje x )
( Longitud del péndulo )
( Ganancia total del sistema ) (4.2)
EPN

¿—-163
la función de transferencia del sistema en lazo
abierto es ( CAP I I I , numeral 3.7 ):
-89 -89G(s) = = (4.3)
s2-g/| s2 -89
Es necesario realizar una comparación entre las
características de la planta antes y después de la
Realimentación de Estado.
4.1.2 LUGAR GEOMÉTRICO DE LAS RAICES DE LA PLANTA
La estabilidad relativa y el funcionamiento
transitorio de un sistema de control están directamente
relacionados con la localización en el plano S de las raices
de la ecuación característica.
En el gráfico 4.1 tenemos el lugar geométrico de la
ecuación 4.3, en el observamos un polo en S = 9,43 y en S=-9,43.
El sistema es totalmente inestable.
4.1.3 RESPUESTA DE FRECUENCIA.
Al tratar el problema por técnicas en el dominio de
la frecuencia, se asegura el control del comportamiento de
respuesta transitoria en términos de especificaciones del
Dominio de Frecuencia tales como: Margen de Fase, Margen de
Ganancia y Ancho de Banda/ este procedimiento indica
claramente las características del sistema.
Las funciones transferencia que tienen polos y/o
ceros en el semiplano derecho S, son funciones de fase no
EPN

164
mínima.
Nuestro sistema es de fase no mínima, tiene un polo
en el semiplano derecho S = 9,43. El rango de cambio neto de
fase sobre el rango de frecuencias desde cero hasta infinito
es menor para el sistema con todos los polos en la parte
izquierda del plano S ( ver figura 4.2) .
180'
FASE NO MÍNIMA
w
Fig. 4,2 Característica de fase para la función de Transferencia
de fase mínima y no mínima.
Para nuestro sistema (lazo abierto), en el diagrama de
Bode ( Mag.y fase --> gráfico 4.3 ) con un valor de: G(s)= 1/s2_8g, el
margen de ganancia y fase son negativos. Fácilmente podemos
concluir; el sistema es inestable.
4.1 .4 RESPUESTA DEL SISTEMA EN EL DOMINIO DEL TIEMPO.
Queremos indicar por todos los medios (se observó al inicio
del CAP I I I , numeral 3.1.2.C }, la inestabilidad de este sistema en
lazo abierto y sin compensación, tenemos el valor de
y(t) = A e ^ J t + B eX2t (en el gráfico 4.4 (ver CAP I, numeral 1.10)).

165
4.1.5 ANÁLISIS EN EL PLANO DE FASE.
El uso de esta herramienta de trabajo como es el
Plano de Fase, nos ayuda a visualizar con más detalle la
inestabilidad del sistema.
Tenemos la función de transferencia en lazo abierto
Y(s) -89
R(s) S2 - 89
S2 - 89 = O
hacemos:
- G(s)
X2= 89 (4.4.a)
dt
dX:
.= 89 X1
dt
dX-,= 89 = S (4.4.b)
A =O 1
89 OSistema autónomo no depende del tiempo
EPN

166
[XI-A] =- 1
-89 A,
X2-89 = ± V89
1 Y 2 son reales; \-\á en el semiplano izquierdo
y \2 en el semiplano derecho, corresponde a un sistema
inestable.
jw
l on tu ra Sistema Inestable
FIg: 4.4 Características de la Planta
Y(S) -89
R(S) S2 - 89= G(S)
La curva típica de X en función del tiempo se
obtiene aplicando el método de Carley-Hamil lon. Cualquiera sea
la función transcendente de una matriz cuadrada puede ser
expresada por un polinomio de grado n-1, donde n es el orden
de la matriz cuadrada.
f (A) = e At
f(X) = e x t
A =
O
89 O 2x2
g(X) =
EPN

167
Función de Transferencia en lazo abierto
las raices son:
\ 8 9 t „ -V89 te + e = 2 aoVsÜ t ~Vs~9 t rt i Je - e = 2 Vs9 ai
e te + eao =
ai —
2
1?t
2V89
Xi(t) -y/2 (4.5)
*-Ü?te
Flg 4.6 X-( (t) del sistema
sin Reallmentaclón de estado
EPN

168
4.2 DETERMINñCION DE Lfl REñLIMENTRCION DE ESTñDO
El paso previo dentro del estudio de la Real. de
Estado es la Controlabilidad del sistema (CAP I I , numeral 3.2). De
acuerdo a la ecuación 3.24, nuestro sistema es de estado
completamente controlable.
Me [ B AB ]
dat [Me] * O no singular
4.2.1 VECTOR k DE REALIMENTACION DE ESTADO
En el diseño de la Re alimentación de Estado
obtuvimos el gráfico de la figura 2.6.d (CAP I I , numeral 2.1.5) este
representa el resultado del proceso antes mencionado (f igura
4.7).
Con los valores del numeral 4.1.1
Vector de Realimentación de Estado (ecuación 3.60)
K! = -1,00785
k2 = -0,015714 [ sg ]
k = [-1,00785 -0,015714] (4.6.a)
Vector de Realimentación de Estado en Variables de fase.
kxf = 89,49 [ 1/sg2]
k2f = 1,4 [1/sg ]
kf = [ 89,49 1,4] (4.6.b)
EPN

169
4,2.1.a FUNCIÓN DE TRANSFERENCIA EQUIVALENTE
Heq(s)
Con la ecuación 3.63 (CAP I I I , numeral 3.5) tenemos:
Heq (s) = k2f S + k^Heq (s) = 1,4 S +89,49 (4.7)
El Heq (s) es un compensador por Realimentación
que condiciona el comportamiento del sistema en lazo cerrado
(fig. 4.7).
4.2.1.b LUGAR GEOMÉTRICO DE LAS RAICES DE LA FUNCIÓNDE TRASNF. CON REALIMENTACION DE ESTADO.
Con las ecuación 3.64 (CAP II ! , numeral 3.5) tenemos
K ( k2f S + K!*) 1.5 ( 1,4 S + 89,49)KG(S)Heq (s) =
S2 - g/| S2 - 89
2,1 ( S + 64 )G(S}Heq (s) = • (4.8)
S2-89
Con esta función observaremos en el L.G. de las raices
el efecto del Heq(s) dentro del sistema.
La función tiene:
un cero en s= -64
dos polos s - - 9,43
s = + 9,43
EPN

R(s) c(~) ~89S7-89
^fc>
Flg. 4.7 Sistema de Control con Rea l lmenlac lón de Estado
Al introducir el Heq(s) (ecuación 4.7} mediante la
Realimentación de Estado, hemos agregado un cero a la
función de transferencia G(s) (ecuación 4.3), de lazo abierto.
Esto implica desplazar el L.G. de las raices hacia la
izquierda, convirtiendo el sistema inestable (íig. 4.1} a un
sistema condicionalmente estable, (ver (íg. 4.8.a y 4.8.b)
Otro objetivo de utilizar realimentación en
sistemas de control es reducir la sensibilidad del sistema a
variaciones de los parámetros y perturbaciones.
4.2.1.C FUNCIÓN DE TRANSFERENCIA CON REALIMENTACION
DE ESTADO, EN LAZO CERRADO
Mediante el uso de las ecuaciones 3.61 y 3.62, las mismas
que representan los coeficientes de Y(s)/R(s) obtenemos.
akx = 45,2
ak2 = 2,079 (4-8)
Y(s)
R(s)
1,5(-89)
S2 -f 2 S + 45
Si resolvemos la fig. 4.7, vamos a obtener la misma
función de transferencia con realimentación de estado en
lazo cerrado.
EPN

VM
Y(s) G(s)
R(s) ™ 1 + G(s)Heq(s)
1,5 (-89) 1.5(89)
Y(s) S2 -89 S2 - 89
R(s) 2,1 S + 134.23 S2 + 2.1 S + 134.23- 891+ •
S2 - 89 S2 - 89
Y(s) -133.5
R(s) s2 + 2s-t-45 (4.9)
La ecuación característica de nuestro sistema de
control con Real, de Estado mostrado en la fig. 4.7 es:
2,1 ( S + 64 )1 + G(S)Heq (s) = 1 + « O (4.10)
S2 - 89
El criterio de estabilidad de Routh-Hurwitz, nos
dice que la ecuación característica de segundo orden debe
tener todos los coeficientes positivos para que haya
estabilidad en el sistema,
q(s) = s2 + 2s + 45 —> cumple con esa condición.
No todos los valores de K (ganancia del sistema ) son
adecuados para la estabilidad de nuestro sistema (ver gráfico 4.8).
K ( 1.4 S + 89,49 )
1 + G(S)Heq (S) = 1 + • = OS2 -89
Utilizando el criíerio de Routh - Hurwttz, encontraremos el valor
de K límite para la estabilidad.
CRN

S2 - 89 + K ( 1.4 S + 89.49 ) = O
S2 + 1.4 K S + 89.49 K - 89 - O
S2
S°
1 89.49 K - 89
1,4 K O
b1
[ 89.49 K - 89] 1.4 Kb1 = > O
1.4 K(4.11)
89.49 K - 89 > O
K > 0.994 EL SISTEMA ES ESTABLE.
y el valor de K escogido, lo encontramos así:
S2 + 1.4 K s + 89.49 K ~ 89 = O para
S2 + 2 S + 89.49 K - 89 - O
2
ü>n = 1
k =1.4
1.5
Los parámetros de la función de transferencia son :
C = 0.1566
con = 6.6353
|3 « eos'1 C = 81,43°
El lugar geométrico para estos valores está en la figura 4.8.C
Para un valor de K = 1,01137 de la ecuación 4.8 (fig. 4.8.c) el
factor de amortiguamiento ^ tiene el valor adecuado de
£=0,707, cuando S= -1 - ]1 y S = -1 -t- J1, con lo cual se obtiene una
respuesta aceptable del sistema a una entrada escalón,no
obstante este no ha sido el criterio usado en nuestro
diseño.
EPN

173
SI K se incrementa, Wn ( distancia del origen a los polos de lazo
cerrado) aumenta y la respuesta del sistema será cada vez más
rápida , es decir £ disminuye, las rafees de la red cerrada se aproximan al eje
imaginaria y la respuesta se vuelve cada vez más oscilatoria.
En el gráfico 4.9.a tenemos la respuesta transistoria
del sistema a una función paso para dos valores de K, las
dos curvas se estabilizarán a los 4 segundos.
Y(s) _ -133.5 K- 1.5
R(s) S 2 - f - 2 s + 45 ' (4.12.a)
Y(s) -890 K - 1 0
R(s) S2 + 2 S + 801,1 (4.12.b)
La curva N 5 2 , es una respuesta es muy oscilatoria.
Por lo tanto consideramos necesario, analizar la
sensibilidad del sistema realimentado ante las variaciones
de la ganancia K ( utilizamos el criterio del apéndice B ) .
Para una variación del 30 % en la ganancia
AK = ± 0,45
K = K0± AK
K «1.5± 0,45
K0 s2 + 2 s + 45 - o las rafees son: r - -1 ± j 6,633
KÍ S2 + 2 S + 89 (1,95 -1 ) + 0,513 = O
s 2 + 2 s + 8 5 ^ 0 las raíces son: r - | = - 1 ± j 9,165
K2 S2 + 2 S + 89 (1,05 -1 ) + 0,953 - O
s2 + 2 s + 5,403 = O las rafees son: r2= -1 ± j 2,098
EPN

174
Para incrementos positivos de la ganancia el cambio
de raiz es :A r1 - j 2.5318
La sensibilidad es :
r1
AK
r1 2,538,43 90C (4.13.a)
AK
K
0.45^1.5
Para incrementos negativos de la ganancia el cambio
de raiz es : A r1 - - j 4,5352
La sensibilidad es :
r1 rlS « S
- A K K-
4,53= 15,17 - 90° (4.13.b)
AK
K
0.451,5
El ángulo de la sensibilidad de la raiz indica la
dirección en que se moverá la raiz {ecuaciones (4.13)) a medida
que varia el parámetro K, lo podemos observar en el gráfico
4.9.b
H9.I6 K=1,95 $ = 0,108
-- 16,63 K=1 ,5 £ = 0,149
--J2,09 K=1,05 $ = 0,13
— J2.09
Fig 4.9.b Sensilibídad del sistema cuando varía la ganancia K
EPN

175
Tenernos además :
VALORES CALCULADOS DE:
a) rapidez de la respuesta Tr y Tp.
u- (81,45°n/l80°) 1,72
Tr = - "IZZZZIZ: e ™ 0,25935 sg6,7082V1-(0,1491)2 6,6332
(4.14)
nTp= .» 0,473615 sg (4.15)
6,6332
b) la proximidad de la respuesta a los valores deseados de Mp y Ts.
MP = 1,62
Ts = 3.8479 sg (4.16)
VALORES MEDIDOS DE:
Con una entrada R(S) = escalón unitario, en la ecuación 4.8, la
respuesta transitoria del sistema de red cerrada en la figura
4.10. En la figura 4.11, tenemos la misma respuesta transitoria
del sistema descrita en términos de:
a) rapidez de la respuesta Tr y Tp.
Tr = 0,26 sg. (4.17)
Tp= 0,47 sg. (4.18)
b) la proximidad de la respuesta a los valores deseados de Mp y Ts.
Ts = 4 sg
SP= 60. % . (4.19)
El margen de error entre los valores calculados y
medidos de TryTpson mínimos.
EPN

V76
4.2 .2 RESPUESTA DE FRECUENCIA DEL SISTEMA CON
REALIMENTACION DE ESTADO
Las características del sistema; estabilidad
relativa y rapidez de respuesta se encuentran a
continuación, valores que son obtenidos del diagrama de
Bode y Nyquist de lazo abierto (G(s)Heq(s) --> ecuación 4.5); el
diagrama de Bode de Lazo Cerrado (G(s) --> ecuación 4.9 ) .
En la descripción gráfica de la respuesta de
frecuencia ( fig. 4.12 ) , observamos un cambio sustancial en el
Margen de Ganancia. Margen de Fase y Ancho de Banda con
respecto a la figura 4.3.
Los valores son:
M. de Ganancia = 3db
M. de Fase = 6.25°
Ancho de Banda =10,17 rad / sg. (ver gráfico 4.13.b)
El criterio de estabilidad de Nyquist se define en
términos del punto (-1,0) en la gráfica polar, o sea, el
punto O db a 180° en el diagrama de Bode. Evidentemente la
proximidad del L.G de GH(jw) (figura 4.13) a este punto de
estabilidad es una medida de la estabilidad condicionada de
nuestro sistema.
El gráfico N 914.a nos muestra el diagrama de Bode de un
factor cuadrático (ecuación 4.8) debido a un par de polos
complejos conjugados. El máximo valor de respuesta de
frecuencia MpQ'w) se presenta en la frecuencia resonante:
Wr = Wn V 1-2Í¡2
Wr » 6,56 rad /sg
en el gráfico 4.14,5 la misma respuesta de frecuencia
para la ecuación 4.8, cuando hemos variado la ganancia K de la
función de transferencia, si K > kO el sistema es más
subamortiguado, caso contrario si K disminuye.
EPN

177
4.2.3 ESTADOS INACCESIBLES.
Una forma de entender el efecto de un estado
inaccesible dentro de la Realimentación de Estado es
haciendo uno de los coeficientes [Ki] igual a cero.
Esto puede verse en el lugar geométrico de las
raices, pues el diseñador no tendrá control completo sobre
la localización de los ceros de G(s)Heq(s).
Esto puede ilustrarse considerando, en el presente
ejemplo:
La ecuación 4.5 es :
2,1 (S + 64) 1.5 ( k2f S + ^f)G(S)Heq (s) = =
S 2 ~ 8 9 S 2 ~ 8 9
si k-j = O
K = 1,5 ( ganancia del sistema )
2,1 sG(S)Heq (s) = (4.20)
S 2 -89
Los resultados pueden mirarse claramente en la
figura 4.15; el sistema tiene:
un cero en S = O
y dos polos en s = - 9,43 y S = + 9,43
El sistema es inestable.
si K2 = O
K = 1,5 ( ganancia del sistema )
134G(S)Heq (s) = • (4.21)
S2-89
EPN

178
Ecuación muy similar a la N2 4.3 , por consiguiente el
lugar geométrico de las (ftg. 4.16), es igual al obtenido en la
f igura 4.1.
El sistema para cualquiera de los dos casos es
inestable.
4 . 2 . 4 ANÁLISIS EN EL PLANO DE FASE.
Tenemos ahora la función de transferencia con
realimentación de estado, cuya ecuación es :
Y(s) K• = G(s)
R(s) S2 + ak2S
Y(s) 1,5« » G (s)
R(s) s2 + 2S + 45
y 2 + 2y + 45 y - 1,5 R = 0
donde:
X1 =y
X2=y
hacennos:
X1 =X2
X2= - ( 45 X1 + 2 X2)
dX2 45X-¡ + 2 X 2
45S = + 2
X 1X 2 /
EPN

A =
A =
89 O
3a-
O
-45 -2
X2 + 2 X + 45 = 0
X1 = -1 + J
Sistema autónomo no depende del tiempo
[XI- A] =
X -1
45 X+ 2
X-j y X2 son complejas conjugadas y están en el
semiplano izquierdo (ver CAP I, numeral 1.11). Por lo tanto
corresponde a un sistema asintóticamente estable ( FOCO
ESTABLE). Permanece dentro del punto de equilibrio y tiende a
volver al punto de equilibrio. El sistema tiene un punto de
equilibrio en XQ .
-j 43
Foco estable Asín lo t i c a m e n t e estable
FIg: 4.17
EPN

180
La curva típica de X en función de t, se obtiene
aplicando el método de Carley-Hamilton.
f(X) = e xt
X = -1 ± i
Los valores en el espectro se igualan
e
e
ai «e e d)
(2)
sumando y restando 1 y 2 obtenemos los valores de a0 y a-j.
2 ( a 0 - 2 e e
-t /—aO ' a1 = 2 6 COS V44 t
. -t . /—'2] V44 ai = e 2j sen V44 t
ao = 2 e eos + e-t .
+ e
)" sen V4Ít
los valores de aQ y a-¡ son :
-t /—ao « 2 e sen [ V44 t + 0,97 TC
-t ,—.ai = 0,152 e sen \44 t
ai
X(t) =
a0 a-)
_ a-j _3o- a-j
y
0
= 1
EPN

X(t) =
a0 a1
_ a - | -ao-a-,
y
0
=
aO y
-a1y
la respuesta o valores de X-| y X 2 son :
X-|(t) = 0,303 9'* y sen [ VíTt + 1,47 )
X2(t) = 0,152 e~ y sen t (4.22)
Fig. 4.18 X(t) del Sistema con Reallmentaclón de Estado
EPN

182
4.2.5 ERROR NORMALIZADO AL OBTENER LOS VALORES DE akl
[aki = Coeficientes del Denominador de Y(s)/R(s)]
El Chequeo de los resultados obtenidos al buscar los
valores de aki (Coeficientes del denominados de Y(S)/R(s» nos da una idea
de la precisión de los resultados. Utilizamos la ecuación 3.50.
ak¡ - a¡ - Kkf¡
emáx = (4-23)ak¡
con ak-| = 45
45- (-89 ) - 1.5 (89,49 )
45
e-L - 5,22 x 10 - 3
con ak2 = 1,4
2,079 + 0 - 1 . 5 (1,4
e 2= •2,079
e 2 = 0 .
emáx = 5,22x 1 0 - 3
EPN

A 83
4.3 ERROR EN ESTRDO ESTRCJONflRIO.
Nuestro sistema no tiene polos en el origen ( S = O ),
ésta en una condición necesaria en la determinación de las
constantes Kp, Kv, Ka; además sabemos que el det [ A - Kbk" ] en lazo
cerrado es igual a 33,4 . Es sistema es estable cuando
det [ A - KbkT] * O .
El error en estado estacionario se calcula a partir
de las siguientes ecuaciones.
4.3.1 ERROR DE POSICIÓN Y CONSTANTE DE ERROR DE
POSICIÓN.
ep = (4.24)
a1 + Kk-j
Para obtener un error de posición cero ( ep = O ) es
necesario que KCX — a-j + Kk-j , en este caso no sucede asi,
pues tenemos una planta polar, por lo tanto ep es igual a:
-89+ 1.5 (89,49) - 1.5 43,735
ep =
-89+ 1.5 (89,49) 45,235
ep = 0.966 (4.25;
La constante de posición Kp = (l-ep)/ep
Kp = 0.0343 (4.26)
4.3.2 ERROR DE VELOCIDAD Y CONSTANTE DE ERROR DEVELOCIDAD
Tenemos C1*0. C1=1 y C2 = O
EPN

184
(4.27)
KCi
Para una planta Polar tenemos e
a2 + Kk2 Kk2
KCi
ev = 1,4 (4.28)
La constante Kv = 1/ev = 0,7143 (4.29}
El valor de ev > O, el sistema es estable (error
finito), 'no se consigue ev = O pues tenemos un sistema polar.
Para el error de aceleración ea, no se puede seguir
a este tipo de entrada.
4.4 DETERMINRCiON DEL ESTIMñDOR DE ESTRDO
Tenemos las condiciones que ofrece este paso, es
decir: Deseamos que los polos dominantes en el Regulador
sean aquellos conseguidos para la planta con la Ley de
Control, los polos del Estimador deben ser mucho más
rápidos que los polos del Control.
De esta forma si tenemos:
s-j = a-j +jb-j Polos del control
Los polos ha encontrarse serán 5 más rápidos
Recordemos que:
EPN

185
Con el criterio del 2% )1
donde:
Para el tiempo de estabilización ts2 tendremos que
considerar lo siguiente:
ts-j 4
ts2 = = donde : a2 _ §a±
Sin embargo í¡ debe pe rmanece r invariante .Normalmente, basta tomar 5 = 4 .
De la función de transferencia con Realimentación deEstado:
Y(s) -133.5
R(s) s2 + 2S + 45
tenemos los parámetros :
C = 0,1491con = 6,7082
tSi = 3,8479SP = 60,76 %
El polinomio característico en lazo cerrado:
s2 + 2S + 45
tiene las raices : S: = - 1 + j 6,63S2 = - 1 - j 6,63 (4.30)
EPN

186
Los polos del Estimador serán:
a2 = 5 a-L
a2 = 4 (-1) = -4
b2 = 5b!
b2 = 4 0 6.63) - j 26,53Su. = - 4 + j 26,53S2 = - 4 - j 26,53
El nuevo polinomio es:
= ( S + 4 - j 26,54 } ( S + 4 + j 26,54)
» S2 + 8S + 719,84 (4.31)
El tiempo ts2 de estabilización es:
tsx 3.8479
ts2 = = • sg = 0.962 sg
4 4 '
calculando mediante la relación:
4 4 4tSl = = • = • = 1 sg
C2 0:)n2 (0.1507 ) ( 26.543) 3.999
En el gráfico N9 4.19 tenemos el tiempo de
estabilización del estimador de estado
4.4.1 MATRIZ L DEL ESTIMADOR DE ESTADO
Es necesario encontrar el valor del vector L,
aplicamos el procedimiento que nos indica el numeral 2.2.7,
donde el det [ SI - A + L C ] es el polimonio característico, de
lazo cerrado, de un sistema con Estimación de estado, y los
polos de este serán las raices del polinomio considerado.
Podemos escribir entonces:
EPN

187
det [ SI - A + L C ] = Sn + a^-1 + ... + a2S +
det [ S i - A + L C] = S2 +8 S + 719,84 (4.32)
S O
O S
S -1
-89 S
O 1
89 O[1 0 ]
O
O
-89 +U
S2 + S L! + ( L2 - 89
tenemos:
Igualando los dos polinomios, término a término
S2 + S L! + ( L2 - 89 ) = S2 + 8 S + 719,84
L-L = 8
L7 = 808,84
8
(4.33)L =
' LI
L 2 .
=
8
809
L! = 8 [ 1/Sg ]
L2 = 809 [1/sg 2 ]
Hemos aplicado el principio de separación, donde el
Estimador y Ley de Control han sido diseñados por separado.
EPN

188
4.4.2 ECUACIONES DEL CONTROLADOR Y DE LA PLANTA.
Si deseamos conocer las ecuaciones del Controlador,
es necesario obtener las matrices A', B', C* : ver ecuaciones
2.131.a. CAP. II.
A' = [ A -L C - BK ]
B' = L
C' = - k
D1 = 0
A' =0 1
89 0-
8
809
[ 1 0 ] -
0
-89
(4.34)
[-1,0078 -0,01571]
A' =0 1
89 0
-8 1
-809,7 -1,4
8
809
8 0 0 0
809 0 89,7 1,4
B' =
C' = [ 1,0078 0,01571] (4.35)
Las ecuaciones anteriores pueden escribirse de la
siguiente forma :
X = A' X + B' Y
U = C' X Ecuaciones del Controlador.
EPN

189
Xi
X2
=-8 1
-809,7 -1.4
Xi
X2
+
8
809
U = [1,0078 0,01571] X
Y
(4.36)
Y las ecuaciones de la Planta :
Xi
X2
=
0 1
89 0
Xi
X2
+
0
-89U (4.37)
Y = [1 O ] X
La función de transferencia del Conlrolador es: ( de la ecuación 2.130)
U(t)
Y ( t )= C1 [ S I - A']-1 B1 4- D1
ésta ecuación tiene el siguiente valor:
U(t) 20.78S + 826.5096
Y(t) S2 + 9.4 S + 820.9
(4.38)
4.5 C ñ R R C T E R i S T í C R S DEL RCTURDOR
4.5.1 CIRCUITO DEL AMPLIFICADOR DE POTENCIA
Nuestro diseño tiene la config^ión del amplifi-
cador de simetría complementaria ( ± Vcc ) ver figura 4.20.
EPN

1 30
-15
Voltajes de polarización
VCE (NPN, PNP) = 15 Volts
VBE (NPN, PNP) = O volts
VREl (NpN. PNP) = O volts
Fig, 4.20. Circuito del ampl i f icador de POTENCIA
Condiciones para el diseño :
1.- RE-] y R££ nos sirve para compensar térmicamente
a Q-l Y Q-2 respectivamente .
Existe corriente de fuga Ico no recomendable
que pase por Q2 y luego por o_i creando una
I=plco,, lo que produciría un calentamiento
destruyendo los elementos . Con R^ ay camino
para Ico. { Qi se demora en desatenuarse, se
mejora con
2.- RE<< R| caso contrario se pierde eficiencia.
Nuestro diseño se limita a la etapa de po-larización, no
tenemos señal a la entrada del amplificador de potencia.
EPN

Necesitamos un valor de corriente lo
suficientemente grande para un buen funcionamiento del
Actuador .
Datos para la selección de los íransitores.
Transistor de Potencia (NPN)
bVCEO = A > Vcc. ( Voltaje colector emisor de ruptura con la
base abierta y saturada )
bVCES = A > Vcc ( Voltaje colector emisor de ruptura con la
base en corto a emisor )
Es necesario asumir estas condiciones, cuando se satura Ql todo el
voltaje de la fuente cae sobre él.
Corriente máxima de colector del dispositivo
referido a cero (corriente directa )
PD y el Hfe mín del dispositivo.
Además tenemos :
CQI (4-39)
(corriente quiesceníe de colector del dispositivo ( transitor)),
cuando existe señal a la entrada del amplificador.
I Q ( corriente máxima de colector debe ser < que la especificación de
IQ del dispositivo (transistor))
VRE1 Voltspequeño en O (4.40)
,3 < ^e-j <0,5 Tenemos PD holgada además °ei <
'CQ1BQ-¡_ = • (4.41)
hfecn
EPN

corriente de base se calcula a partir de la corriente de
colector ICQ. y la, especificación mínima de! dispositivo.
Re2 « i BQI (4.42)
Re 2 = 0.1 I BQi (4,43)
{VBE n ) Volts
Re 2:
EQ2 ~ cQ2 = ' Re2. + ' BQ1
CQ1I BQ1 = _ (4.45)
hfeCH
1EQ2 = 'CQ2
P
P DQ2 = (4.46)
hfeQ2
CQ2
BQ2 • =
hfeQ2
Necesitamos un transistor (NPN) para obtener la configuración
Darlington con el anterior transistor
bVCEO = A volls
bVCEO = B volts
bVCBO = B volts
IQ = C amperios
Hfe mín
I Reí « I BQ2M (4.47)
EPN

133
lR e l =0.1 |8Q2M
para la parte simétrica (- Vcc ), como ya explicamos anteriormente
utilizamos transistore PNP con similares características a los anteriores
y de forma análoga los oíros cálculos.
Q1' = Q1 ( P N P )
Q2' = 02
El diseño se simplificó aún más/ en el mercado se
consiguió un Darlington de potencia. En este caso, tan
sólo es necesario tener presente estas consideraciones :
- La corriente de colector ICQ1 = 1.4 amperios
( servomotor, Eacómetro y banda conectados entre sí )
- El valor de Hfe min. del Darlington de Potencia.
Los cálculos son los siguientes :
fj.6 Volts
Rel = - . - o.s1. 4 amperios
COI
BQ2 =hfeQ del Darlington
1. 4 amperios
BQ2 = = 1. 4 m A
1000
El valor de corriente en la base del Darlington de
potencia ' Bo2 " 1 - ^ m A , puede suministrar el operacional
conectado a la base del transistor, (ver características dinámicas del
amplificador operacional )
EPN

1 94
4,5.1.a; RESULTADOS EXPERIMENTALES CON EL.
AMPLIFICADOR DE SIMETRÍA COMPLEMENTARIA.
El gráfico 4.21 tenemos los puntos a, b, c, lugares
donde se tomaron los siguientes valores :
a,Amplif.de Pot.
b-motor
Fíg. 4.21.a Amplificador de Potencia
Vin [ volt]
Vout [ volt]
Eg [ volt]
I ¡n [ mA ]lout [ mA ]
Vin [ volt ]Vout [ volt ]Eg [ volt]I ¡n [ mA ]lout [ mA- ]
1,99
0.94
0.25
0.18
64 .5
-2
-0.76
-0.24-
-0 .19
-8 1
2.5
1.29
0.45
0.23
74-
-2.54
-0.143
-0.49
-0 .25
- 8 4
3.04
1.83
0.81
0..29
8 8
-3.02
-1.8
-0.72
-0.29
- 8 9
3.95
2.76
1.23
0 . 3 8
1 1 5.
-4,1
-2.8
-1.21
- 0 . 4
-1 27
[a]
[b]
[c]
[a]
[b]
[a]
[ b]
[c]
[a]
[a - ]
Tenemos un valor de corriente I out = 1.075 amperios cuando se han conectado todos los
elementos que hacen e! ACTUADOR, en este caso la corriente I ¡n = 1mA
Tabla 4.1 Valores de Corriente y voltajes de entrada y salida
( En lazo abierto )
lout
EPN
Fig 4,1.b Corriente de Salida vs Corriente de entrada

195
4.5.2 FUNCIÓN DE TRANSFERENCIA DEL MOTOR G(s)
Es necesario :
La constante mecánica que se obtuvo considerando las
características velocidad versus tiempo del motor, como se
muestra en la fig. 4.22
E! valor de la constante mecánica :
-c m = 0.16sg
1/T m - 6.25 (4.48)
Vln [ VOlt] 1.49 1.75 1.98 2.24 2.49 3.25
W [rad /sg] 68.35 88.71 112.09 127.69 159.95 221.77
K [rad/VOltsg] 46 50.09 5 6 . 6 5 9 . 6 7 6 4 . 2 3 . 6 8 . 2 3
Tabla 4.2 Valores para calcular k 1/ i m
Se ve que para voltajes de entrada mayores a 1.75
voltios, la constante tiende a ser lineal, lo que no ocurre
con voltajes menores al anterior valor . Esto nos lleva a
que debemos trabajar en la región mayor a 1.75 voltios.
La función de transferencia del motor es :
62.18
G(s) = (4.49)
( S + 6.25)
EPN

W radseg
221.7
134.7 .... 63%
[seg]
Flg. 4.22 Característica del servomotor
Velocidad versus tiempo.
196
4.5.3 FUNCIÓN DE TRANSFERENCIA DEL TACOMETRO
El procedimiento seguido ( Cap I I I numeral 3.8.2.b) para
obtener el gráfico 4.23, es el siguiente : se colocó un
voltímetro a los terminales del generador, y mediante un
controlador de velocidad se detectó la misma en el eje, los
valores se encuentran en la tabla 4.2.
Kg = 7.44 x 10 "3 Volts / Rad /seg. (4.50)
Eg [ VOlt] O 1,22 1,7 2,19 2,25 2,3
W [ rad/seg] O 163.98 228,49 294,35 302,42 309,14
Tabla 4.3 Valores para el cálculo del Kg del Tacómetro
EPN
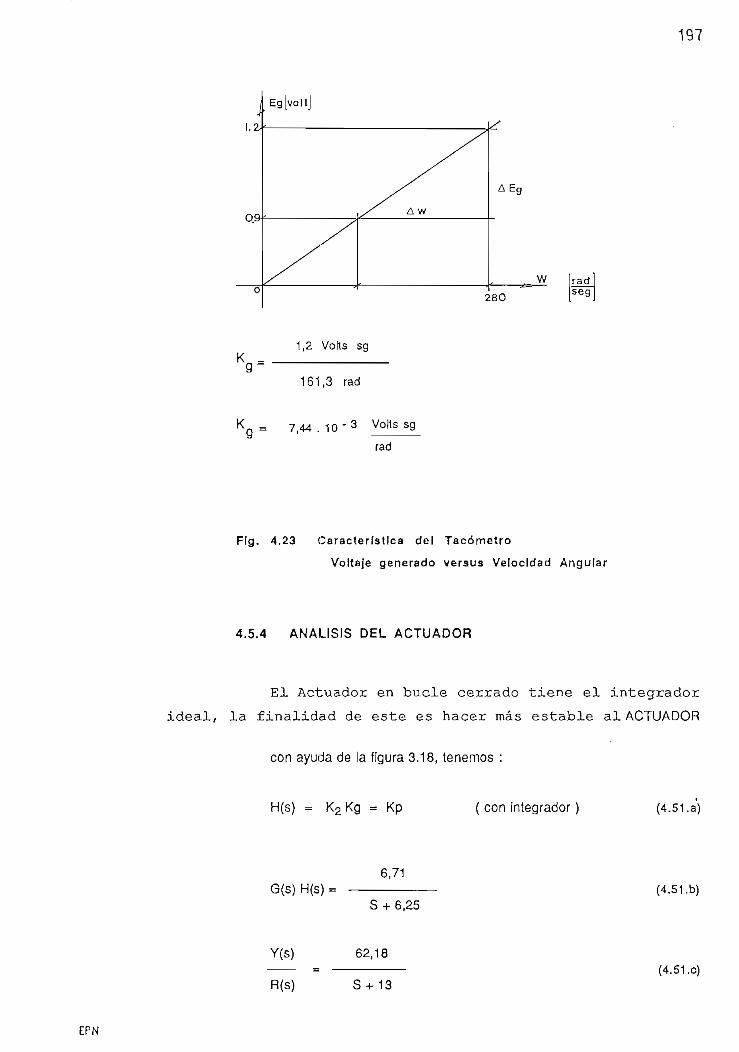
\.2--~
V1,2 Volts sg
161,3 rad
K = 7,44 . ID'3 Volts
rad
280racfseg
Flg. 4.23 Característica del Tacómetro
Voltaje generado versus Velocidad Angular
197
4.5.4 ANÁLISIS DEL ACTUADOR
El Actuador en bucle cerrado tiene el integrador
ideal, la finalidad de este es hacer más estable al ACTUADOR
con ayuda de la figura 3.18, tenemos :
H(s) = K2Kg = Kp con ¡ntegrador (4.51.a)
G(s) H(s) =
Y(s)
R(s)
6,71
S + 6,25
62,18
S + 13
EPN
(4.51.b)
(4.51 .c)

198
H(s) = Kg S ( sin integrador) (4.52.a)
0,463G(s) H(s) - (4.52.b)
S + 6,25
Y(s) 44• == (4.52.c)
R(S) S + 4,3
En el gráfico N94.24 tenemos dos curvas, respuesta del
Actuador a un función paso. La N52 se obtuvo considerando la
presencia del mencionado integrador ecuación (4.51 ,c), la N2 1
sin este, ecuación (4.52.c).
En la N9 2 la velocidad de respuesta es más rápida,
se observa además una pérdida en la ganancia del sistema.
La sensibilidad ha variado, pues conocemos que la
introducir modificaciones al parámetro H(s) de la
realimentación se producen estos resultados.
Respecto a la respuesta de frecuencia, diagrama de
Bode en lazo abierto (magnitud y fase), tenemos dos figuras, la
4.25.a y la 4.25.b, considerando la presencia del integrador
(ecuación 4.51.b) y sin este (ecuación 4.52.b) respectivamente. En
la curva 4.25.a, observamos la presencia y acción del
integrador, este permite al Actuador tener un margen de
ganancia infinito y un margen de fase adecuado, todo esto
miramos más claramente, en la curva 4.26 ( diagrama de Nichols ).
Si hacemos un análisis en lazo cerrado, existen las
curvas 4.27.a (ecuación 4.51 .c ) y 4.27.b { ecuación 4.52.c) en el
mismo orden lógico de presencia del mencionado integrador.
En la curva 4.27.a el ancho de banda es superior respecto a
la curva 4.27. b., para no redundar en este tema, tan solo
hemos verificado lo ya explicado en el Capítulo II! numeral 3.82.
EPN

199
4.6 FUNCIÓN DE TRRNSFERENCIf l DEL SENSOR DE POSICIÓN
La función de transferencia del potenciómetro (cap
numeral 3.10) es :
Vp(s)= Kp
6 (s )
Para obtener el valor experimental de Kp en cada
posición del ángulo, tomando el valor del voltaje Vp, ver
tabla 4.4. El valor de la pendiente de la recta de la figura
4.2f dará la constante Kp.
kp = 0,217 Volts / rad. (4.53)
0 [° ] 0° 5° 10° 15° 20° 30° 40°
Vp [ VoltS] O -0 ,59 - 1 , 2 1 -1,73 -2 ,04 -3 ,02 -4 ,09
0° -5 D -10° -15° -20° -30° -40°
Vp [ VoltS] O 0,53 1,02 1,62 2,19 3,15 3,99
Tabla 4.4 Valores para el cálculo del Kp del Potenciómetro
( 3,15 - 0,99 ) Volts
30 °- 10
o,108
6,108
rad
EPN

200
rad
Flg 4.28 Características del Potenciómetro
Voltaje versus Posición.
Dentro del proceso de control de posición del
péndulo invertido, el valor de voltaje de este sensor en
los limites ± 22°, será aproximadamente :
AV = ± 22° ( ver capítulo I I I , numeral 3.1.2.6)
AV = Kp AV
AV = 0,108 Volts / ° X ± 22 ° = ± 2,376 Voltios.
EPN

201
4.7 CIRCUITO ELECTRÓNICO DEL SISTEMR PÉNDULO INUERTIDO.
El circuito electrónico del sistema es implementado
mediante el uso de amplificadores operacionales, inversores
e integradores .
4.7.1 CIRCUITO DEL ESTIMADOR DEL ESTADO
El Estimador de Estado está descrito mediante la
ecuación 3,92 y 3.93 que son escritas a continuación:
Ecuación diferencial que expresa la aceleración del sistema:
X2 = 89 X1 + [ 89 ] U + 809 [ Xr ]
Ecuación diferencial que expresa la velocidad del sistema:
X} = X2 -f- 8 [X-, - X 1 ]
ecuaciones que pueden ser representadas así:t ^
X2 = 1 [ 89 X1 + [ 89 ] U + 809 [ Xr X1 ]] dx
x1 = J [ dx ,
los respectivos diagramas están en la figura 4.29.
89
809
+ ,
89
(4.54)
(4.55)
diagrama de la ecuación 4.54
EPN
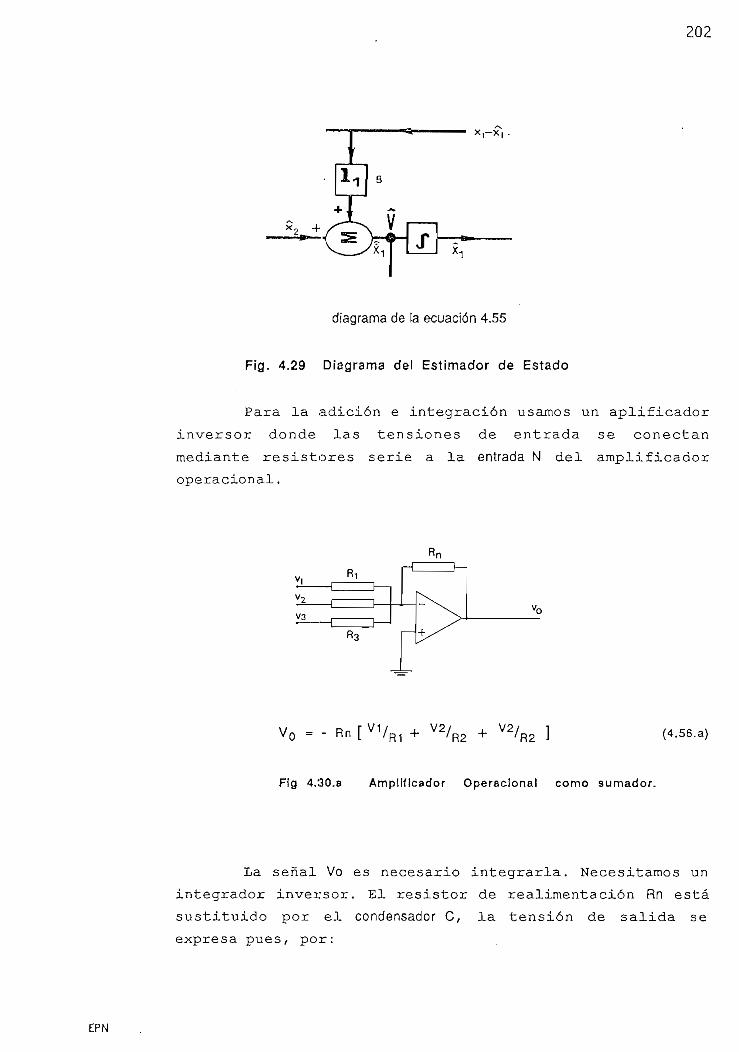
Z02
diagrama de la ecuación 4.55
Fig. 4.29 Diagrama del Estimador de Estado
Para la adición e integración usamos un aplificador
inversor donde las tensiones de entrada se conectan
mediante resistores serie a la entrada N del amplificador
operacional.
V0 = - R n [ V 1 / R 1 + (4,56.a)
Fig 4.30.a Amplificador Operaclonal como sumador.
La señal Vo es necesario integrarla. Necesitamos un
integrador inversor. El resistor de realimentación Rn está
sustituido por el condensador C, la tensión de salida se
expresa pues, por:
EPN

Z03
Un R
vin.
(4.56.b)
Flg 4.30.b Amplificador Operacional como Inlegrador.
Para la ecuación 4.54 uti l izando los criterios
anteriores (figura 4.30.a y 4.30.b) tenemos :
^ t ^X2 = J 89 X-, + [ 8 9 ] U + 809 [XrX^ ]
L2 = 809 sg'1
Hacemos R f = 1 MQ
EPN

Rf Rf 1MQ
-> R3 = . = = 1, 236
Lo 809
Z04
g Rf Rf 1M Q
-_= --> R2= = = 11R2 89
Si R f = 1 Mil
C- 1uF
Realizamos igual proceso con la ecuación^ tXT = I [ X2 + 8 [ X T - X, }] dx
Rf Rf 1MO-> R3 = . = = 125 KU
R L
Flg 4,31 Circuito del Estimador de Estado
EPN

ZQ5
4.7.2 CIRCUITO DEL VECTOR DE RALIMENTACION DE ESTADO
El vector de Realimentación de Estado está
representado por la ecuación' 4.57 :
k = [ -1,00785 -0,015714 ] (4.57)
->
Rf2
iokn
RÍ2
iokn
Rf1 = 10,785 KO
Rf2 = 157,14 O
Cada uno representado por un potenciómetro.
J_
Fig 4.32 Circuito del Vector de Reallmentacíón de Estado
EPN

206
4.7.3 CIFÍCUITO DEL ACTUADOR
La figura 4.33 nos describe la configuración del
actuador :
Flg 4.33 Circuito del Acluador
4.7.4 CIRCUITO DE LA ECUACIÓN X = Y + LO-
100 kn
Flg 4.34 Circuito de la ecuación x = y + I
EPN

201
4.7.5 CIRCUITO GENERAL DEL SISTEMA PÉNDULO INVERTIDO.
EPN

Z08
4.8 CRRRCTERISTICRS DINRMINRS DE LOS ELEMENTOS
ELECTRÓNICOS USRDOS EN EL DiSERO .
Los amplificadores operaciones inversores, sumadores
e integradores son:
4.8.1 AMPLIFICADORES OPERACIONALES
TLO72 CP contiene dos circuitos operacionales
TL081 contiene un circuito operaciónal
Las características dinámicas de este tipo de
amplificador operacional son :
Ver Fig 4.35 Características dinámicas de los amplificadores
operacionales.
4.8.2 TRANSISTORES
Para el diseño del Amplificador de Potencia de
simetría complementaria, utilizamos transistores en
configuración DARLINGTON.
Los transistores de potencia son:
T I P 121 (NPN) Y TI P 1(15 (PNP)
o Los transistores
ECG 261 (NPN) Y ECG 262 (PNP)
Las características din/árnicas son:
Ver Fig 4.36 Características dinámicas de los transistores.
EPN

Z09
4.9 CIRCUITOS IMPRESOS
Existe la etapa en el diseño y fabricación del
equipo electrónico, constituye la elaboración de las
máscaras que van a servir para la fabricación de circuitos
impresos. Este proceso se lo ejecuta en forma manual, o
mediante un paquete de software llamado smARWORK.
Para nuestro caso, se utilizó el mencionado paquete
de software, los circuitos construidos (máscaras) son a
doble lado, siendo estos, el lado de componentes y el lado
de soldadura, en el primer lado se dibujo los caminos para
la polarización y en el segundo lado las diferentes
conecciones del circuito.
4.9.1 ESTIMADOR DE ESTADO.
figura 4.37
4.9.2 VECTOR DE REALIMENTACION DE ESTADO Y
ECUACIÓN X = Y + L9
figura 4.38
4.9.3 ACTUADOR.
figura 4.39
EPN

Z10
4.10 C O N C L U S I O N E S .
1. - Nuestro sistema tiene -una sola entrada y una sola
salida, consideración muy necesaria para el diseño en
cuanto a la forma de las ecuaciones de estado.
2. - Por medio de la Realimentación de Estado se puede
conseguir situar los polos de la Función de Transferencia
en lazo cerrado según las especificaciones que se requieren
para la respuesta del sistema. Se puede tener un sistema
completamente estable para valores de ganancia mayor a
O.99, si el vector de Real. de Estado KT tiene su elemento
Kn mayor que cero.
3. - Respecto a la utilización de los Diagramas de
Bode, Nyquist y Nichols ha tenido como finalidad determinar
la estabilidad relativa de nuestro sistema en lazo abierto
antes y después de la Realimentación de Estado.
4.- Respecto a la utilización del Estimador de
Predicción, ha sido utilizado para minimizar el error en el
control del péndulo.
5. - En el diseño del Actúador se realizaron varias
consideraciones.
5.a. Obtener la función de transferencia real
del servomotor. Ver claramente la ganancia de este que
varia en forma lineal con la amplitud de la entrada,
(valores de voltaje mayores a 1.75 voltios } es decir la
ganancia tiende a permanecer constante.
5 .b. El tacómetro tiene el inconveniente de
presentar rizado y ruido de las escobillas del colector a
bajas velocidades que distorcionan sus características
lineales. Al aumentar el valor de Kg (constante del
tacómetro} el sistema es más estable.
5.c. Se trabajó con la simulación del sistema de
control en el computador analógico, no fue posible obtener
curvas que demuestren este trabajo, el plotter no funcionó.
EPN

211
Se han enunciado las conclusiones de este trabajo,
en forma resumida debido a que se ha hecho un análisis
bastante exhaustivo de los efectos tanto de la
Realimentación y Estimación de Estado. Como también las
características del Actuador.
RECOMENDACIÓN.
Realizar el diseño cuando el control U es.
a.- Fuerza
• b.- Aceleración.
y la obtención de las diferentes ecuaciones que
permitirán el control del sistema ( ver apéndice ).
EPN

LUGAR GEOMÉTRICO DE LAS RAICES
Q8-OUN-69
I I
I X
- S=9.43
S=9.43
x=POLO o=
Archlvo'SCl/favdlt
GRÁFICO 4.1
Función
de
Transferencia
Realimentación de Estada .
de
la
Planta
sin
r. f
<-: \ —PQ /

u a e
-55 ri
a s
(rad/sec)
GRÁFICO 4.3
Diagrama de Bode (MAGNITUD y FASE en lazo abierto)
Función
de
Transferencia
sin
Realimentación de
Estado.

O '
u t u t
Tiwe
GRÁFICO 4.4
Respuesta
de la Planta sin
Real, de Estado a una
entrada Escalón.

UGAR GEOMÉTRICO DE LAS RAICES
13-JUN-69 O .
21
x=POLO o=CERO
D— 5 U
GRÁFICO 4.8.a
Función de Transferencia E
quivalente
2.1 G(s)Heq(s).

B a 9
GRÁFICO 4.8. b
Función
de
Transferencia
con
Rea 1imen tación de
Estado en lazo abierto.
2.1 GCs)Heq(s).

I CO
I N 1 19
5 5 0 -5 -18
- — —
\ A-9
,43
— " ^™
\ u- J
b r
I ce u_
K=
0,9
9
9,4
3
n K=
i,sr /
I I
-15
-18
-518
15
GRftFICO 4-S.c
Lugar Geométrica de las Raices de la función
K G(s)Heq(s)3 para diferentes valores de ->
(K ganancia).

o u t P u t
V í
\0
\»
Tiwe
GRÁFICO 4-9,a
Respuesta
del sistema
con Realim.
de Estado
en
lazo cerrado
a una función paso, cuando K = 1.5 ;
K = 10.

o uso
-
t
CC
t=4
sg
GR
ÁF
ICO
4
.J.O
Respuesta transitoria del
sistema.
Tiempo de estabilización Ts.

o u t u í
GRÁFICO 4.11
Respuesta transitoria del sistema,
Tiempo Pico
Tp
Tiempo de Aseenso
Tr
Rapidez del sistema Tr y Tp

m a 9 n i t u a e B
28
-i
\"
\
h s
182
Í83
Freq
uenc
y (rad/sec)
GRÁFICO
4.12
Diagrama de Bode de la Función
2.1 G(s) Heq(s) .

ti)
M a § n * i t u d e d B
-28 10-i
v
V"
Tv'""1 \"
100 GR
ÁFICO
A.12
.b
Diagrama
de
Bode
N
vvP h a s e
-270
Í02
Freq
uenc
M (rad/sec)
-360
3
para diferentes valores de ganancia

g ,
«**«
W=oo
,****
-1,48
-1,28
-i-.68
-,4
@
GRÁFICO 4.13.a
Diagrama de NYQUIST de la función
2.1 G(s) Heq(s).

m
[cc_.F
. = 6
,25<
t u d
-61-16
8 -12
8
GR
ÁF
ICO
4
-13
_b
Phase
Diagrama de NICHOLS de la función
2.1 G(s) Heq(s).
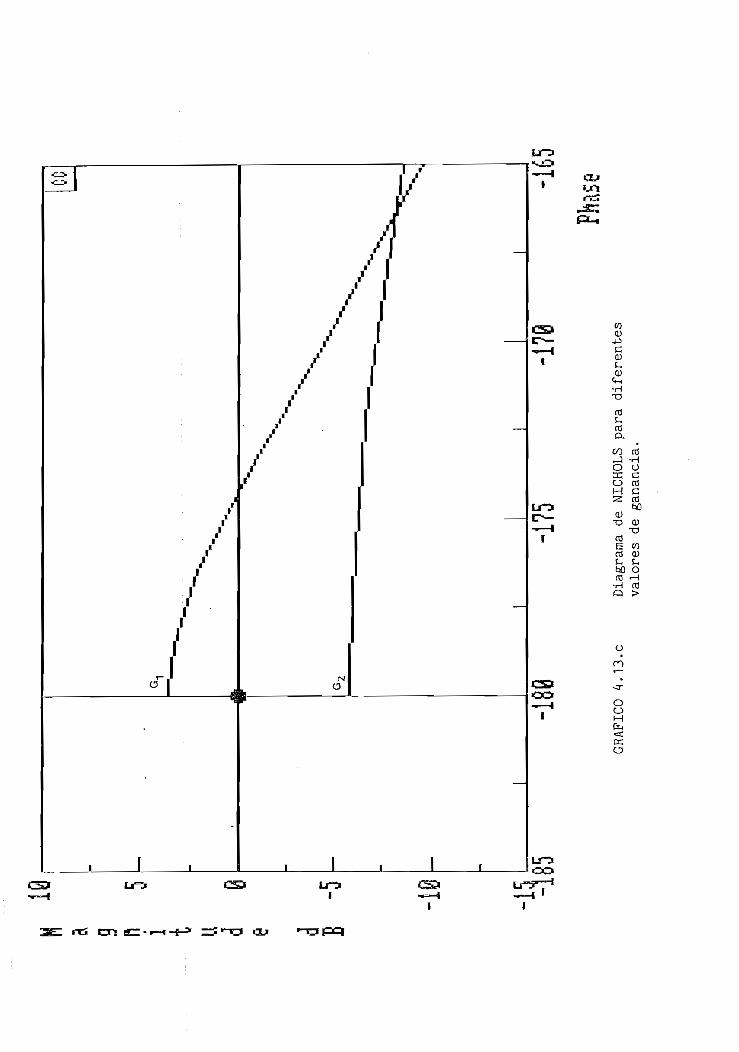
1 t u d e d B
-
ce
-175
-165
Phase
GRÁF
ICO
A.13
.CDiagrama de NICHOLS para diferentes
valores
de ganancia.

HT
U
a g i t u d fi
u g
e d R -?
flQ
U
V
-4fl Ttv
-fif
i
- -
1 i i i i i i
_,/'" \
"—
—
-,t
, """•
,. '\i i i i i i i i i ', i *»
\»
"•f
\t
|.-
a.,.L
LL
U
ce ••
'l(B
\
p
a-7
? s
1 ue
-144
1^
2
-?1fi
¿jIU
-?HR
60
0
-M«
65
6 ra
d
1j*i •
i
eu i
Freq
uenc
u (r
ad/s
ec)
GR
ÁF
ICO 4
.14
.aDiagrama de Bode de la función de Transf. con
Reallment-
de Estado en lazo cerrado.

a 9 n -
i t u d -
e B -i
K=1,011
K=1,05
K=1,5
v\
V
ce
-i GRÁFICO
3(rad/sec)
Diagrama de Bode de la función de Transf. con
Realiment.
de
Estada,
en
lazo
cerrado
(diferentes valores de ganancia K)-
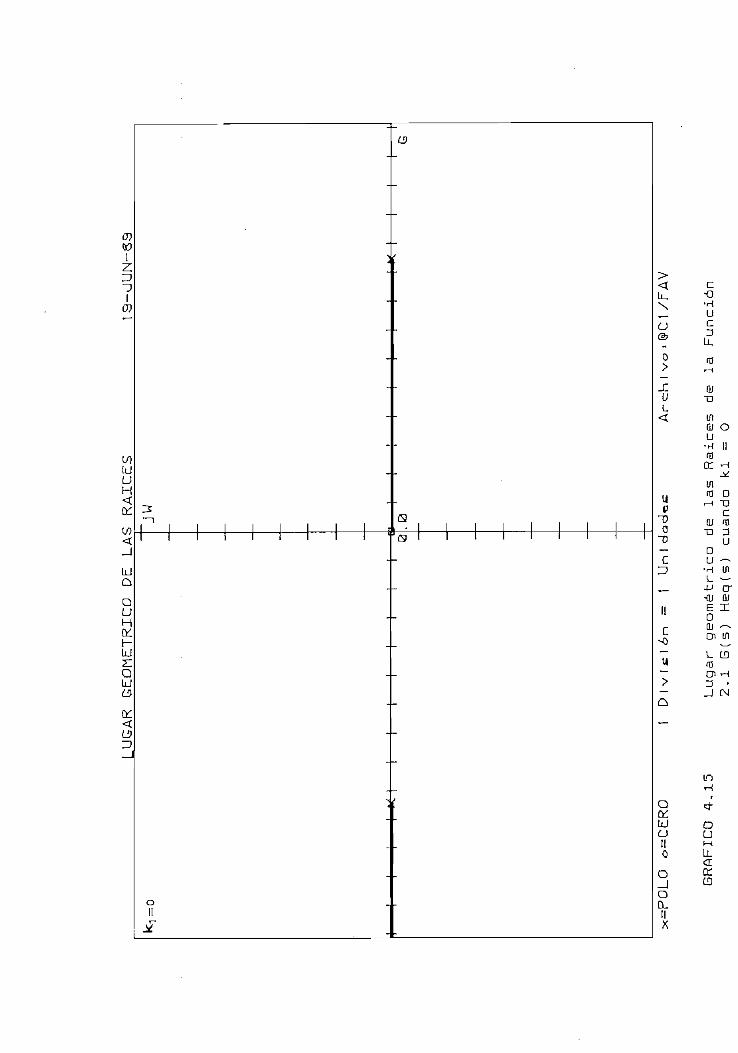
LUGAR GEOMÉTRICO PE LAS RAICES
k,=o
x^POLO o=CERO
í D I v leí¿n =
i Uní
Arehlvo>®Cl/FAV
GRÁFICO
4.15
Lugar geométrico de las Raices de la Función
2.1 G(s) Heq(s) cuando kl = O

LUGAR GEOMÉTRICO PE LAS RAICES
"JW
-9,4
9,4
o=CERO
¿n =
Archivo.OC1/FAV
GRÁFICO 4.16
Lugar geométrico de las Raices de la Función
2.1 G(s) Heq(s) cuando k2 = O

o u t P u t
</ A '
\yp
=A
sen
6,6
3te
't
.-V
e^B
sen
26
,53
te"1
ce
«A
lL.
UW
,25
GR
ÁF
ICO
4.1
7Tiempo de Estabilización del ESTIMADOR
ts = 1 seg.
p,'p
lan
tae
= e
sti
ma
do
r

o u t P8,
u
11
6,68
2,28
GRÁFICO
4.23
,19
,38
,56
,75
ce
1,13
1,31
Respuesta del Actuador a una función paso
1
sin integrador
2
con integrador
1,5
Une

(*; a g i) i t u a e
29
-i
ce0
F a s
-368
(rad/sec)
GRÁFICO 4.25.a
Diagrama de Bode del ACTUADOR, con integrador
en lazo abierto.
GH(s) = 6.71 / S+6.25

t u
-6B
y" i n
i ni n
i ni
rl1
2
P h a s e
-248
Freq
uenc
u (ra
d/se
c)G
RÁ
FIC
O
4.2
5.b
Diagrama de Bode del ACTUADOR, sin integrador
en lazo abierto.
GH(s) = 0.46 S /S+6.25

(9-
t u a e
Margen de Pase
=
153,8
Margen de Ganancia =00 /w=o
-1-128
-68
GRÁFICO 4.26.a
Diagrama de Nichols del ñCTUADOR
1
con Integrador
2
sin Integrador

NYQU
IST (
ftct
uado
r
GRÁFICO 4.26.b
Diagrama de Nyquist del ACTUADGR
1
con Integrador
2
sin Integrador
1,2
líe al
Gí.iw)

t UX
t l
ceh a s e
-270
(rad/
sec)
GR
ÁF
ICO
4.2
7.a
Diagrama
de
Bode
del
cerrado
? co
n Integrador.
Y(s)/R(s) = 62.18 / S+13
Ac
tua
do
r e
n
laz
o

a 9 n i t u a e
-i
>_ *•"
•.!<.
y s"
"\_
"••
•-....
\
\c
p h a e
-18!
-278
v (rs
id/se
c)
GR
ÁF
ICO
4
.27
.bDiagrama
de
Bode
del
abierto, sin Integrador.
Y(s)/R(s) = 44 / S+4.3
Actuador
en
lazo

JU072, U072A, TL072BD, JG, OR P DUAL-IN-UNE PACKAGE
(TOP VIEWl
U081. TLOB1A, TL081B
JQ OR P DUAL-IN-UNE PACKAGG
(TOP VIEW)
i UB2 7
3 6
4 5
D VCG +
n s. AMPLU IN+ / *2
OFFSET N1 C
IN- CIN+C
vcc-C
i Ua1 7
3 6
4 5
U NC
D VGC +U OUT~\T N2
máximum ralings over op«rstlng fraa-alr temperatura range (unían otherwlse notad)
Syppty vcltage, Vcc-f U*e Nota 1'
$uDp!y voltea*, VCC- 'sefl Not* DOi'HifBntl»! input voltaga dea Note 2)foput vohíga |»*.e Notsi 1 and 31DuntJonof ogtput ihort clrcult Uae Note 4)Comlnuoui total dlislpatlon at |oí belowl 25 °C Írs«-a1r temperature (*ee Noto 6]
Ot)«riilng ftse-ílí tempeifituto rang«.Storig* tamporature ¡truje
litd tempaistuío 1,6 mm (1/16 inchl(rom ctt» (oí 60 iftcondtL**d temperatura 1,6 mm (1/10 inch)(tom cu* íof 10 Sícond»
J, JQ, JH, FK, or W packago
0, N, or P pfickaga
T1.07_M
18
-19
3:30
= 16
unllm!t«d690
-56 to 125
-65 to 150
300
TL07__I
13 .-18
±30
:=ÍS
unilmited680
-26 to 85-65 to 150
300
260
Tt.07_-CTL07_AC
TL07_BC18
-18
±30
= 16unllmilsd
880
0 to 70-65 to 150
300
260
UNIT
v
v
V
V
mW
ec»c
°c
cc
S: i. All voltio» veluti, *xe«pt dlfítttntltl vort«s<«, ir» wfth i«ip*a to th* mlápolm txtw*»n VCCi. ind Vcc_.3. 0¡ff«[»ntÍ»l volugo •'« »t tht ronlnverrino Input t«nnln*[ wKh f«ip*ct to tht Invtítlng tnpui ttfmln*!.3. Th» mignitud* oí th* Input votí»s» mun n«v»( *xc«s<J th* m4gn¡tud« of th* tupply volt*?* or 1E vohi, vhichtvit li Un.«. Th* owput miy b* ihonftdlQDfoundof to «r-J^í iuppJy. T*mp«fiturt ind/o( iupp!y voit*í«« mimU llmilsdlo »ntur» thtt tht dliilp«ttonMt!og
U not ixcetdad.G. FOT op*ritlon sbov« 26 "C íít«-»lr ump^titur», n(*f to Oliilpallon D«í»tlng Curvti, Stctton 2. !n th* J irxi JG piebtoei, U07MM chipi tf«
tlloy-moüniid; T1.07»], TL07_C, TX.07_AC, »nd TL07^BC chipi ir» o'»" mounud.
eléctrica! characterlttlcs, x — •*• 1 6 V (uníaos oiharwlte notad)
PARAMETER
VIQ Input offset voliasfl
Temperatura
"VIO coeffícieni of input
offset vortage
|Q Input oflsel cuitan!1
IB Inpul bias cun&m*
Commort-modeVICR ^ vo(iBoe iangB
Máximum peakVOM
outpul voltaga «wing
Large-signa! ttifíetentlalAyo
voluge amplilicetlon
Bj Uniíy-gain bandwidth
r| Inpul rasimnca
Comroon-modaCMRR
rejeciion ratio
:SVR cejociion olio
lAVCC;t/AV|0|
Suppíy cutíentrr
(par omplifiarl
VOÍA'02 CrosslalK atianualion
TEST CONDITONS '
V0 - 0, TA - 25°C
RS « 50 D TA " ful! fange
V0 - 0, Rs - 50 0,
TA " full rango
TA - 25 °C
TA " full rano*
TA - 25 "C
TA - 1"» range
TA » 25 »C
TA • 25°c. RL - 10 ka
RL " fc 1QkD
A u RL fe 2 ka
V0 - ±10 v. RL * 2 ka,
TA - 25 *CV0 - ±10 V, Rc a 2 kD,
TA « fu» ranea
TA - 25 "C
TA - 25 »C
RS •= 50 a, TA - 25 ec
Vcc - ± 1 5 V to ± 9 V, Vo -0.
HS -= 50 a. TA - 25 ec
Na load. Vo « 0,
TA • 25 'C
AVD - 100, TA - 25°c
TL0701TL071ITL072ITL074I
MIN TYP MAX
3 6
B
10
6 100
10
30 200
20
±11 ±12
±12 ±13.5
±12
±10 ±12
50 200
25
3
1012
80 86
80 86
1.4 2.S
120
TL070CTL071CTL072C
TL075C
MIH TYP MAX
3 10
13
10
6 100
2
30 200
7
=t1l ±12
±12 ±13.5
±12 '
±10 ±12
25 200
15
3
1012
70 86
70 86
1.4 2.5
120
TL07QACTL071ACTL072ACTL074AC
MIN TYP MAX
3 6
7.5
10
5 100
2
3O 20O
7
±11 ±12
±12 ±13.5
±12
±10 ±12
50 20O
25
3
1Q12
BO 86
80 86
1.4 2.5
120
TL071BC 1TL072BC 1TL074BC 1
MIN TYP MAX
2 3
5
10
5 100
2
3Q 200
7
±11 ±12
±12 ±13.5
±12
±10 ±12
50 '200
25
3
1012
80 86
80 86
1.4 2.5
120
UNÍ!
nA
,v,
PA
nA
PA
nA
V
V
V/m
MH
a
dB
dB
m,
dB
*AII charactefi'Mics ale measured under open-loop cond¡ticos with ¿eio common-modo Inpul voltage tinless otherwlse ipadlied. Full range (ot TA ít 25°C to 85°C for TL07_| »rn) O'C la 70*C
for TL07_C, TL07_AC, and TL07_BC.
*lnput bias cuiranti oí a FET-inpul opeiBtiooal amplifier are normal junction lavarse cutiants, whicfi ate temperatura sensitiva ai shown in Figure 1 B, Pu\se techniquBs musí be used Ihat wil
mainlaln ¡he ¡uncí ion i empata tuies as cióse lo ttie ambiem lempeíalure as Is possible.
Figura 4.35 Carácter!ampl.
dinámicasoperaclónales.
de los

TYPES TL070, TL070A, TL071, TL071Af TLÜ71B,TL072, TLQ72A, TL072B, TL074, TL074A, TL074B, TL075
LOW-NOISE JFET-INPUT OPERATIONAL AMPLIFIERS
TYPICAL CHARACTERISTICSt
FREQUENCY
S- í l JS --s
I "° -•¿1 '""
j -í:»--
100
l
ilí|
> vi T? H7.S -s.
>
"S
i;/0.1
SI
< >•' —í
J "
8 "
-75 -
¡TiriU"llllíí ííívl
í jt L^jin vCCJ-ISv¡i¡ir M.» i ¡al~"
1S S !Ik lOk 100V
FIGURE?
?.L;?s"cIII II
F1 1
• [ III K »
1 M 10 U
CC.-ÜSV.,-ís-c
y
/)
/
^ _ _
0.7 0.* 0.7 1 J 4 7 1 0
«L-l-o-J Rniíboa^VC]
FIGURE 10
FREE-AIRIEMFEWAIUnE
v
~"--^
"^-^
l r«
"^--^
í -M 0 2Í 60 7S ICO 13S
FIGURE 13
1
j
i>
Ie
"
jj1
íl!
tlJ. 5
110
175
tS
01
11S
H7.S
tío
i;.s
u
0
I.O
i.ai.ti.<uIB0.1
0.6
O.i
OJ
0C
FflEQUÍNCY
TTIJA-
1T A - I
MAXIU
TA-TS
¿
liliÍS'C
Ü^1 \ \TA
ln\ •s>c\\!
vcc«L-
-ss'c
J—
i-llí
¡«<x.7
U-flGE-SlCNAL
10a! r—
v s — LN3 lo5— p
i ,0-j "Nj
1 \ !0>
9 '
iLll — Lljj i . — L_^.. . , ttll£Oi. IQOt 1 « 4 M 10U
FIGURES
SU^LWOLTAGE
C
^
/
/•Vi -X/ 1
5 , - \ 1.1 -^
1,,ó _ rHAS.? ' SHIF7
I <••'
z °-* "L *, f l|f
o j 4 a g 10 iz u i» T
FIGURE 11
SUff LY CUUHENT EOOIV
SUffLYVOLIAGE
„ TA - 55'
-r
1 í i 1 10 U 14
FIGURE U
ORGE-SIGNAL WLSE «EVOHSC
'> ( — —
í' JLr1 *-
vcdt '
/TT \/OUTfMT \
~^1WÜT
— -
-2S1
\I V
C
i r'iI.LIí \ 1
> 'A|> M|
* -o
í
1 '°
¡ >c
.^mAsesHfT
vcct-
X 'y7*\t
\L
\T
'í í
'c
EHENTIAL.LfAOEFICAIK3N
\
\
- O"
- ¿— 90*
\
J leo'oo 1 1 iok icoi i u 10 u
FIGURE 16
Z€D UK1TY-CAIN BANCrwlDTHíMrKASESH FT
\ ^
IIS V
•"""^
1NOW DIH
.1
- — ' —
*"!
^x.
- 1.03
£
- O.M JX
i 0 JS SO 71 100 1ÍS
FIGURÉIS
ALEWTiM^JIWlSEVCM.TACE
FREíXieUGY
1 T¡1
Vi
! 13
ÍH.1L 1 i
AVD- 10
i"f!l¡r "r"
1
Ílííilí!
1
I'1!t;;
a :!!•
FIGURE22
OUTTVIVOLTAGI
ELA«£DTtUE
«
> 3, ""fT^V.
j lí 1
* 13 -JU
1 ' -V-J
Vcci - 1» V— r«L- J'sn
TA • »'c -O 0.1 OJ QJ 0.4 OJ O.í 0.1
1-TVw-*»
Figura 4.35 Características dinámicasamplificadores operaeionales.
de los

'6CG'TYP«:
ECG28T
ECG282
Dascriprion andApplication
NPN-Si, Dariington Pwr-Amp(Compl to ECG262)
PNP-SÍ, Dariington Pwr Amp(Compl to ECG261)
Cb (lectorTo Base-
Volta,
BVCBO
100.
100
Collector' To Eminer
Volts
BVcEO-
100-
100.
Baae'to
EmitterVolts
avEBO
5
5
Max.
CollecrorCurranr
IQ. Amp»
8
8
Max.
Devica
DIss. PDWatts
65
65.
Fteq.¡n-
MHzfr
—
_ -
CurrenfGain-
hpE
1000 min
1000 min
TT. ,.
Packaga
Case-
TO-220
TO-220
FigNo
T41
T41
SWITCHING TIMES TEST CIRCUIT
Oí «un tt (*S1"ECOV(»TIYM5.M,móvil). 100-*
Hg¿T41.TO-22DJ
_282't
Mechantes! I marcha r>g»ab¡HtY of TO-220'Plástic Padcago wjth TO-68 Caá* — So«-Data¡l«d Illustration Psg«-l-23;
3000
IDOO
j V C £>4 .DV í j
0.1 Q3 DJ 0.5 0.7 1.0 2.0 3.0 S.O 7,0 101
DCCURRENTGAlNI'C.[:OLLECTOñCURRENT[AMP) _ '
1U 04 0.7 1.0 10 3.0 S.O 7.0 10 20 30*
CÓLLeCTQRSATURATION REGIÓN l lí-BASECUflflENT ImAl /
i ! i ! i Muí M I ! l/f/M'. • í ; ;~'~r¡T¡ i ; ¡ ¡ / / ¡ ¡ ii I ¡ M i l i i ! i i/Víiií
0.1 ai. 0.3 0.5 0.7 ) O 10 3.0 S.O 7.0 10!
" VOLTAGES] ic,coUECTORci;fiflE/n«*pi ' i
'¿>-7 MU "S^l I I rn-j-JH * VBEWH' O— fwi \ i LW-ffW 1 I I
!, I *™l I r-4¿<1 MU S-J I
POWER DERAT1NG
"ÍW O.M 0.1 0.2 0.4 O.í 1.0 2.0 t.O
1C.CQLLECTOflCURRENT{AMP)
30 10 GO Bu )DO 120 UO ISOT.TEMPERATURE10C)
Figura 4-.36 Caracteri dinámicas de los

o oO O O
REAL)MENTACIÓN
i, cí
Figura 4.3S VECTOR DE REALIMENTACION DE ESTADO Y ECUACIÓNX=Y+L-0-

l <d e
O
Figura 4.37 ACTUADOR

TI H-
U3 C ID n H c 3> a a
o o 3 o o D .0 J (t •H-. a .o

/IPEFIDICE A
H.1 PñRRMETROS DEL SERÜO MOTOR DC.
A.1.1 MOMENTO DE INERCIA Jm •
El momento de Inercia Um) puede ser determinado
-utilizando el principio del péndulo torsional, ya ' que la
única medida necesaria es el periodo de rotación angular de
la masa suspendida en el terminal de un alambre de acero,
como lo indica la figura A.1 .
masa
Fíg A.1 Péndulo Torsional. •
Para la medición se sigue el s iguiente
procedimiento: primero se trabaja con un cuerpo de masa
conocido, que generalmente es un cilindro, y se la suspende
con un alambre a un soporte; y luego se lo hace girar
tratando de obtener periodos precisos, los mismos que son
registrados cronométricamente.
El procedimiento anterior se repite con la armadura
del motor 'en consideración, la fórmula aplicable para el
momento de inercia es entonces:
j = JQ ( T/To)2 (A.1)
Donde:
J — momento de inercia de la armadura del motor
Jo — momento de inercia del cilindro de masa conocida
EPN

T = Periodo de oscilación de la armadura
T0 - Periodo de oscilación del cilindro.
El parámetro desconocido en esta fórmula es J0, el
cual se obtiene midiendo la masa y el radio del cilindro y
aplicando la siguiente fórmula:
J0 = M R2 /2 (A.2)
Donde:
M = masa [ Kg ]R = radio [ m ]Jo — momento de inercia [ Kg-m2 ]
Las mediciones son tabuladas en el cuadro de la tabla A.1
M = masa del cilindro [ Kg] = 6 2 . 2 5 x 10~3 Kg.R= radio [ m ] = 0/02565 m.periodo del cilindro [ sg ] = 0,258 sgperiodo de la armadura [ sg ] — 0/113 sg.
Tabla A.1
Aplicando las fó rmulas el resultado fue el
siguiente:
Jm - 4.0585 x 10"6 Kg. m2 . (A.3)
A.1.2 CONSTANTE DE TORQUE ( Kt )
Para determinar la constante de torque (Kt) del
motor, nos apoyamos en las características torque (Tm) con
respecto a la corriente de armadura (Im)/características que
satisfacen la relación;
EFN

Tm — Kt
Kt = Tm
(A. 4)
m [ N-ra / A
El método a seguirse lo muestra la figura A. 3,
consiste en envolver la cuerda alrededor de un plato
ranurado acoplado al eje del motor por el otro asegurar al
resorte (Dinamómetro = Fuerza [Newtons]) , el mismo que estará
previamente fijado para evitar movimiento. Se conecta un
amperímetro en los terminales del motor paa determinar su
corriente, y luego se efectuaron las mediciones presentadas
en la tabla A.2
dinamómetro
ruedaacopladaa I eje
motor
Fig. A.2 Montaje para la medida del Jorque del motor
Volts. Im [ ma] F [ N] T=F.R R = 0,0161m
6
7
8
9
10
630
900
1070
1190
1320
0.22
0.28
0.32
0.37
0.4
0.003542
0.004508
0.005152
0.005957
0.006440
Tabla A.2
EFN

Donde:
Tm = F. Ra t Newtons-m]
0.005957
0.003542
Fig A.3
•1190
Características Torque versas corriente.
(A.5)
Con los valores medidos, obtenemos el valor de Kt
A T 0.002415 [ Newtons-m]
m0.56 A
Kt - 4.3125 x 10-3 N-m / A (A. 6)
A.1.3 CONSTANTE DE FUERZA ELECTROMOTRIZ (Ke)
La constante de fuerza contra electromotriz (Ke)
puede ser medida considerando al motor de prueba como un
generador, esto es accionándolo por medio de un motor
auxiliar, y midiendo tanto el voltaje generado a los
terminales de armadura de nuestro motor de prueba, como
también la velocidad del eje (w). La constante es obtenida
de la relación.
EFN

Eg = Ke W
Ke = Ea / V
(A.7)
(A. 8)
Un diagrama tipleo para realizar esta medida nos
muestra la figura A.4, donde el motor auxiliar es mantenido
a velocidad constante por la unidad de control corres-
pondiente .
alvoltímetro
motor bajo prueba*motorauxiliar
Fig. A.4 Arreglo para medir el valor del parámetro Ke
Circuito del Motor de prueba accionado por un motor
Con el montaje anterior podemos medir a diferentes
velocidades el voltaje generado, ver tabla A.3 y con estos
datos graficamos la curva de la figura A.5 tenemos el valor
de KD :
En [VOI'S]g
RPM.
0.66
1400
0.99
1620
1.3
1760
1.7
1800
1.9
2045
Tabla A.3
Ke = 16.97x 10-3 Volts/rad/sg ( A . 9 )
EPN

La figura A.4 muestra el circuito equivalente del
motor de prueba trabajando como un generador y accionado
por un motor auxiliar.
Si el motor de prueba no es excitado esto implica
que por su armadura no circula corriente ia=0; por tanto el
voltaje Eg medido a los terminales del motor de prueba es
igual a la fuerza contra electromotriz inducida Ee y
entonces se puede aplicar el motor de prueba la relación de
un generador.
I [volts]
Egi
Eg
Fig. A.5
W Wi .[rad
Fuerza electromotriz generado versus velocidad
angular
1.3- 0.66 [ Volts]
1 760-1400 rads/AW X30
K e = 16.97 x 10-3 volts / r ad /Sg (A. 10)
A.1.4 MEDICIÓN DE LA RESISTENCIA DEL MOTOR (R)
En la resistencia del motor rm esta incluida la
resistencia de armadura ra y la resistencia de las
escobillas r .
EFN

= ra (A. 11)
La resistencia de armadura es constante, pero la
resistencia de las escobillas decrece, cuando la corriente
del motor incremente, por esta razón el método deberá
usarse para determinar la resistencia nominal del motor,
usando el diagrama de la fig. A. 6.
Fig. A.G Circuito equivalente para la detormlnacíon de la
resistencia de] motor.
Si consideramos que la corriente I es constante
durante este proceso por cuanto w permanece constante
debido al motor auxiliar, entonces VI = Ldi/^t es igual a cero;
es decir, la inductancia se comporta como un cortocircuito,
y la resistencia R será:
R = (V-Ee) / {A. 12)
Donde:
V es el voltaje constante de la fuente DC.
Ee = Ke w, si w permanece constante
Ahora si mantenemos el rotor fijo, quiere decir que
Y l-a resistencia será R = v/jm, en cambio si mantenemos
EFN

w < 30 RPM es muy pequeño de tal manera que lo podemos
despreciar, ya que está en el orden de los milésimos de
V/RPM-
Nuestras medidas, por facilidad se tomaron con el
rotor fijo. Estas medidas se presentan en la tabla A.4.
Im [ mA]
V [ Volts]
R Í O ]
846
1
1,18
1238
1,5
1,21
1400
2
1,42
2100
2,5
1,19
2800 3300 3900
3 3,5 4
1,07 1,06 1,025
Tabla A.4
El valor de R es
R= 1,165 O (A. 13)
A.1.5 MEDICIÓN DE LA INDUCTANCIA (L)
Para la medición de la inductancia, el motor bajo
prueba se lo conecta como indica la figura A.7 , en donde el
puente de impedancia es seleccionado mediante el cursos de
.selección.
Cuando esto se ha logrado, la posición de L indica
la inductancia del motor. Esto se hace para otras tres
posiciones del eje separados 90°, el valor de la
inductancia L será el promedio de las cuatro lecturas
obtenidas (ver tabla A.5)
En base a las lecturas obtenidas, y haciendo el
promedio resulta que:
EFN

ft11 = 8,829 m H.
12 = 7,116 m H.
13 = 8,992 m H.
14 = 7,874 m H.
I = 8,20275 x 10"3 Henrios (A. 14)
Tabla A.5
selector
© 0 ©motor bajo prueba
FIg. A.7 Medición de L por el puente de impedancta analógico.
A.1.6 MEDICIÓN DEL COEFICIENTE DE FRICCIÓN VISCOSA (D)
Si consideramos las caracteristicas de un motor sin
carga, debernos tomar en cuenta en este caso el torque de
fricción del motor (Tf) , como también el torque de fricción
viscoso el mismo que es proporcional a la velocidad angular
del eje. Tenemos entonces que el torque del motor (Tm) ,
siendo D el coeficiente de fricción viscosa será :
Tm = Tf + D w (A.15)
El coeficiente de amortiguamiento del servomotor se
define como la razón que hay entre el torque con rotor
bloqueado y la velocidad sin carga a tensión nominal,
expresado en unidades consistentes, entonces tenemos:
EPN

D = V/T
Donde:
T = Torque en rotor bloqueado
V ~ velocidad.
Experimentalmente los resultados son:
T = 0,22 N x 0,0161 m = 0,003542 N-m
V= 2245 RPM = 235,095 rad/sg.
D = 15.066 x 10~6 N-m / Rad/sg (A>16)
A.1.7 DETERMINACIÓN DEL VALOR DE LAS CONSTANTES DE
TIEMPO ELÉCTRICA Y MECÁNICO.
Tenemos la función de transferencia del motor
ecuación A.7 , que en función de los valores de cada una de
las constantes obtenidas, tenemos lo siguiente:
Te = L a / R = 7.0412 x 10"3 Henrios/^ {A.17)
Tm = R J / KeKt = 6.4644 x 10'2 rad-sg. (A. 18)
x~ *J**'
-f !í
EPN

/IPEHDICE B
B.1 PñRñMETROS K, 9/| h.
Los valores de : -
K = ganancia del sistema ,
ST/i = relación de cociente entre la gravedad y la longituddel péndulo,
h — lugar geométrico de los polos ,
son obtenidos al efectuar la Realimentación de Estado , Cap ni
numeral 3.5 . Las ecuaciones de este capitulo III, específicamente
los numerales 3.1 - 3.6 son función de los tres parámetros K, g/i,
h.
La función de transferencia con Realimentación de estadoen lazo cerrado debe cumplir con las especificaciones propias deldiseño y son :
Ts = tiempo de estabilización,Tp = Tiempo pico ,
£ = relación de Amortiguamiento ,wm = frecuencia natural del sistema,
•I B .1 .1 ANÁLISIS DE LA FUNCIÓN DE TRANSFERENCIA CON
í REAL. DE ESTADO EN LAZO CERRADO
i*•) En el numeral 3.5 se consideró que todos los estados
ü son accesibles y que pueden medirse y Realimentarse.
L'Queremos que el sistema se estabilice en un tiempo de 4 segundos.
/I-1)
\<''$ Ts s= 4-T = 4 / - „ _ 4I I b — **• l - / £ (£n - ^
í¡ * ' Por lo tanto:
CCOn - 1

Las especificaciones se obtendrán de la función de
transferencia con realimentación de estado, en lazo
cerrado.
Vector de Realimentación k± = - ( h2! + g )
Coeficientes del Denominador de Y(s) /
= ai
(B.2)
donde :
( k f )T « k T P
Y{s)
R(s) S 2 + ak2S + ak1 s2 + Kkf2 S
Y(s) K
• • = ( B . 3 )
R(s) S 2 + 2 h K S + [ -9/j + K ( h2 + 9/| ) ]
Y(s)
R(s) S 2 + 2 h K S + [ 9/| ( K - 1 ) + K h2
SÍ :
9/I ( K - 1 ) + K h2 » COn2
entonces :
Kh = CCünKh » 1
EPN

[ K h] h
Y(s)
R(s) S 2+ 2S+ [ 9/ | ( K - 1 ) + h]( B . 4 )
Llamamos q (s) = S 2 + 2 S + [ 9/| ( K - 1) + h ]
q (s) es la ecuación característica de nuestro sistema de
control mostrado en la figura 4 . 7
B . 1 . 2 ESTABILIDAD DEL SISTEMA CON LOS PARÁMETROS
9/| . K, h.
La estabilidad del sistema es resultado de la
ganancia K y los parámetros h, ST/i ( ecuación B.4 ). Es necesario
determinar si alguna de las raices de q(s) están en la parte
derecha del plano S. Si la ecuación es de segundo grado,
el criterio de estabilidad de Routh Hurwitz nos dice: " . .
el requisito para que un sistema g(s ) de segundo orden sea estable es
simplemente que todos los coeficientes sean positivos ".
Aplicando este criterio tenemos;
q (s) - S 2 + 2S+ [ 9/| ( K - 1 ) + h ] : B . S :
S2
siS°
1
2S
b1
9/I ( K - 1 ) + h
0
51 = [ S/| ( K - 1 ) + h ] > O
EPN

La ganancia K debe ser mayor a 1 para que exista
estabilidad en el sistema.
Recordemos k y h están intimamente ligados kh = 1, al igual que i; y con.
B.1.3 ESTABILIDAD DEL SISTEMA CON LOS PARÁMETROS
9/j , K, h. EN EL LUGAR GEOMÉTRICO DE LAS RAICES
Como las raices de la ecuación característica
representan los modos dominantes de la respuesta
transitoria, el efecto de las variaciones de los parámetros
en la posición de las raíces es una medida importante y
útil para conocer el valor de 9/¡ ( ecuación B.4 ) y por
consiguiente el de k y h, de forma análoga los valores de £
y con .
La sensibilidad de las raíces de un sistema:
Y(s)T(s) =
R(s) '
puede definirse como :
ri 3r¡ 3riS = = ( B . 6)
K ainK 3K
K
El cálculo de la sensibilidad de la raíz para un
sistema de control puede hacerse fácilmente utilizando los
métodos del lugar geométrico de las raíces.
La ecuación (B.4) depende de la ganancia K, entonces
observemos efecto de los cambios de este parámetro K a
través del lugar geométr'ico de las raíces de la figura B.1,
EPN

para ello utilizamos la ecuación ( B . 5 ) , la misma que puede
ser escrita asi ( ver ecuación 4.8 CAP 111, numeral 4.2.1 }:
1 +
0/I K + h2 S +
s 2 - g/|
B.7
Fig B.1 Lugar geométrico de las raíces de la ecuación B.7
La figura B.1, es la función de transferencia KG(s) Heq(s)
en el lugar geométrico de las raices, cuando hacemos
Realimentación de estado.
donde tenemos:
• = raíces del sistema de red cerrada
o, x = polos y ceros del sistema de red abierta.
e! elfecto de un cambio en el parámetro K, puede determinarse utilizando la
relación.
EFN

K = Ko ± AK
donde Ko es el valor nominal o deseado para tos parámetro K.
entonces el L.G. de las raices en función de K puede obtenerse utilizando la
ecuación B.5 o la ecuación B.7,
S 2 + 2S + 9/| ( Ko ± AK - 1) + h =0
S 2 + 2 S + ( 9/| Ko - 9/| + h ) ± 9/, AK - O
(9/I Ko -9/| + h) - COn2
S 2 + 2 S + COn2 ± 9/]AK =0
Las raices de la ecuación B.8 son
± 9/i AK ( B . 9 )
La ecuación B.9 sin la variación de la ganancia AK queda
(B.10)así: S = -1 ± j V con2-1
y en el lugar geométrico de las raices :
Rg. B.2 rafees del sistema de red cerrada de la ecuación B.9
EPN

Para incrementos positivos de la ganancia el cambio
en la raíz es:
Ari = j ( con2 - 1 + 9/| AK - V o)n2 - 1 ) - j <x
La sensibilidad es :
ri ri 3ri j a Ko j a
S = S = = = • = jp = p | 9 0 ° (B . i i )AK +K 3K AK AK
KO KO
Para incrementos negativos de la ganancia el cambio
en la raiz es:
Ari = j { V ton2 - 1 - Vcon 2 - 1 + 9/| AK
La sensibilidad es ;
ri ri 3ri - j p. -Ko j (i
S = S = - = - = - •
AK -K 3K AK AK
KO KO
El ángulo de la sensibilidad de la rafz ( ecuaciones B.11 y B.12 ) indica la
dirección en que se moverá la raíz a medida que varía la ganancia del sistema K.
Con estas consideraciones, podemos ubicar las
raices de red cerrada/ seleccionando el valor de Cün ( también
el valor de £ ) más conveniente en la ecuación B.10, podemos inclusive
determinar el valor de la ganancia K ( y de esta forma el valor de h ).
Con ecuaciones B.9, B.10, el gráfico B.2 y con las
consideraciones anteriores podemos obtener el valor
adecuado de K, h y 9/j para nuestro diseño.
EPN

Por lo tanto las ecuaciones necesarias para
determinar el valor de K, h , £ y COn son :
S = -1 ± j con2- 1
(9/| K - 9/| + 1 / K) = con2 y K h = £ con = 1
EJEMPLO B.1
Si escogemos el valor de 9/¡ = 89 ( I = 11 cm )
y si C - °.7°7
1
con = — = 1,4142 entonces (9/¡ K - 9/¡ + h ) = con2 será
C
( 89 K - 89 + 1 / K ) = 2
resolviendo esta ecuación tenemos el valor de K
K = 1,011 el valor de K está en el límite de ganancia permitido.
1. „ 0,9887
K
la ecuación característica del sistema es :
S2 + 23+ 2 = 0
las raíces de esta ecuación son :
S = -1±¡ V c o n 2 - 1 = - 1 ± J V 1 = - 1 ± j 1
Y(s) -89 ( 1,011 }
R(s) S 2 + 2 S + 2
EPN

y si í; - 0,149
1con =—• = 6,708 entonces ( 9/j K - 9/j + h ) » con2 será
C
( 89 K - 89 + 1 / K ) » 45
resolviendo esta ecuación tenemos ei vaíor de K
K « 1,5 el valor de K es > que el Ifmite de ganancia permitido.
1h = • • = 0,7
K
la ecuación característica del sistema es :
S2 + as + 45 = 0
las rafees de esta ecuación son :
S = - 1 ± j V ü ) n 2 ~ 1 = -1 ± j V 44 = - 1 ± j 6 , 6 3
Y(s) -89(1,5)
R(s) S 2 + 2 S + 45
EPN

/IPEnDICE C
C.1 OTRflS FORMflS DE CONTROL PflRfl EL PÉNDULO INUERTIDO
C.1.1 CONTROL POR DESPLAZAMIENTO. U (t) = X
Vector de Realimentación de Estado
k1 = - ( h2 L/g + 1 ) = - 1,00785
k2 = - ( 2h L/g ) = -0,015714 sg
k = L/ 2h L/
En variables de fase tenemos
= [ - ( h2 L/ + 1 ) - ( 2h
= [ h2 + 9/| 2h ]
ESTIMADOR DE ESTADO
-g/i o
O -9/i
x2 = a/,
X1 = X2
x1 - x-,
C.1.2 CONTROL POR ACELERACIÓN. U (t) = X2(t)
Vector de Realimentación de Estado
EPN
k1 = - ( h2L + g
k2 - - ( 2h L )
- 9,5839 m / Sg2
-0.154 m / s g

En variables de fase tenemos :
k* = [ - ( h2L + g ) ' - ( 2h L ) ]
k' = [ h2 + 9/| 2h ]
ESTIMADOR DE ESTADO
X 2 = 9/L X1 + 1/L U + L2 [X 1 -
^ = X2 + LÍ [X-, -x^ ]
-VL O
o -1/L
C.1.3 CONTROL POR FUERZA. U (t) = f (t)
Vector de Realimentación de Estado.
K1 = - M { h2L + g ) = - 0,5868 Newtons
k2 = - M ( 2h L ) = - 0,009428 Kg m / sg
k = [ - M ( h2L+ g ) - M ( 2h L )]
En variables de fase tenemos :
kf = [ - M ( h2L+g ) - M { 2h L )]
-VLM
'LM
EPN

k' = [ h2 + 9/i 2h ]
ESTIMADOR DE ESTADO
X 2 = 9/L^ + 1/LM U + L s t X - , -X, ]
x 1 = = x2 -f L! tx^x^
En los tres casos el vector de Realimentación de
Estado en variables de fase es el mismo.
EFN

HPERDICE D
D.1 UñLORES V CONSTfiNTES OBTENIDñS EN EL DISEÑO.
1 .- Vector de Realimentación de Estado,
k-j = - 1,00785
k2 = - 0,015714 sg
en variables de fase
kf-| = 89,49 1/sg2
kf2 = 1.4 1/sg
2.- Matriz L del Estimador de Estado.
sg
L = 809
3.- Q/| = 89 1/sg2
L = 110 x 10-3 m
m = 9,49 x 10-3 Kg
h - 0,7 1/sg
M « 61,224 X 10-3 Kg
tm = 0,16 sg
Trt = 110 x 10-3 Henrios
longitud del péndulo
masa del péndulo
lugar geométrico de las raíces de los
polos al realizar la Realimen. de Estado,
masa del carro.
Constante mecánica del Servomotor.
Constante eléctrica del Servomotor.
= 7t44 x 1o-3 Volt sg /rad Constante del Tacómetro
= 0,108 Volt / ° Constante del Sensor de Posición
Tiempo de calda del péndulo
EPN

1 . - Autores Varios
2.- Autores Varios
3 . - BOLLINGER.JohnHARRISON, Howard
4, - COROMINAS, Joaquín
5. - CREUS, Antonio
6 . - D'AZZO, John
7 . - DORF, Richard
8 . - PUGA, Edgar
9. - GUPTAYHASDORF
10. - OGATA, Katsuhiko
11.- SHINNERS.S.
12.- TO6EY, GeneGRAEME, Jerald
13.- TUFIÑO, Edwin
Circuit Design for Audio, AM/FM and TV, MeGraw-Hill Book Company, New York, 1969.
DC. Motor Speed Controls, Servo Systems, ElectroCroft Corporation, 1971.
Controles Automáticos, Editorial Trillas, México,1985.
Introducción al Control de Procesos por Ordenador,Marcombo, Universidad Politécnica Barcelona,1975.
Simulación y Control de Procesos por Ordenador,Marcombo, Barcelona, 1987.
Sistemas de Control, Análisis y Diseño Convencional,Paraninfo, Madrid, 1973.
Sistemas Automáticos de Control , FondoInteramericano, S.A, Bogotá, 1978.
Tesis de Grado, Diseño de Sistemas de ControlDiscreto en el Espacio de Estado, EPN, Quito, 1986.
Fundamentáis of Automatic Control, John Wiley &Sons, 1970.
Ingeniería de Control Moderna, Prentice-HalI,Madrid 1974.
Control Systems Design, Wiley & Sons, New York,1977.
Amplificadores Operacionaíes Diseño y Aplicación,Editorial Diana, México, 1979.
Tesis de Grado, Diseño de un Servomecanismo, EPN,Quito, 1980.
EPN
Related Documents











