ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA Departamento de Ingeniería Eléctrica Titulación: MÁSTER UNIVERSITARIO EN SISTEMAS DE ENERGÍA ELÉCTRICA Título del Proyecto: MEJORA DE LA ESTABILIDAD TRANSITORIA EN LÍNEAS DE GRAN LONGITUD MEDIANTE EL USO DE FACTS Tutores: Antonio de la Villa Jaén Pedro L. Cruz Romero Neel Marck Vargas Eufracio DNI: 28985709M Sevilla, noviembre 2016

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA
Departamento de Ingeniería Eléctrica
Titulación:
MÁSTER UNIVERSITARIO EN SISTEMAS DE ENERGÍA ELÉCTRICA
Título del Proyecto:
MEJORA DE LA ESTABILIDAD TRANSITORIA EN LÍNEAS DE GRAN LONGITUD MEDIANTE
EL USO DE FACTS
Tutores:
Antonio de la Villa Jaén
Pedro L. Cruz Romero
Neel Marck Vargas Eufracio
DNI: 28985709M
Sevilla, noviembre 2016

2
ÍNDICE
ÍNDICE
Índice de ilustraciones .............................................................................................. 8
Glosario ................................................................................................................. 13
1. INTRODUCCIÓN ........................................................................................... 15
2. MOTIVACIÓN Y OBJETIVOS .......................................................................... 16
3. ESTABILIDAD TRANSITORIA ......................................................................... 18
3.1. CONCEPTO ....................................................................................................... 18
3.2. ANÁLISIS DE LA ESTABILIDAD TRANSITORIA .................................................... 19
3.3. SIMULACIONES EN EL DOMINIO DEL TIEMPO PARA ESTUDIAR LA ESTABILIDAD
TRANSITORIA............................................................................................................... 19
3.3.1. Modelo dinámico del sistema eléctrico ................................................... 19
4. EQUIVALENTE DINÁMICO ............................................................................ 21
4.1. INTRODUCCIÓN ................................................................................................ 21
4.2. TIPOS DE EQUIVALENTES ................................................................................. 21
4.3. MÉTODOS PARA DESARROLLAR EQUIVALENTES ............................................. 22
4.3.1. Simplificaciones empíricas ........................................................................ 22
4.3.2. Máquina nudo infinito .............................................................................. 23
4.3.3. Métodos modales ..................................................................................... 23
4.3.4. Basado en coherencia ............................................................................... 24
4.3.4.1. Coherencia entre generadores ......................................................... 24
4.3.5. Modal – Coherente ................................................................................... 25
5. FACTS .......................................................................................................... 26
5.1. ANTECEDENTES ................................................................................................ 26
5.2. DEFINICIÓN ...................................................................................................... 26
5.3. TIPOS DE DISPOSITIVOS FACTS ........................................................................ 26
5.3.1. La primera generación .............................................................................. 27
5.3.2. La segunda generación ............................................................................. 28
5.3.3. La tercera generación ............................................................................... 28
5.3.4. La cuarta generación ................................................................................ 29
5.4. CARACTERÍSTICAS DE LOS FACTS ..................................................................... 30

3
5.5. CLASIFICACIÓN DE LOS FACTS SEGÚN EL DISPOSITIVO SEMICONDUCTOR .... 30
5.6. FACTS EN REDES INTERCONECTADAS .............................................................. 31
5.7. OBJETIVOS DE LOS FACTS ................................................................................ 31
6. SVC ............................................................................................................. 33
6.1. FUNCIONAMIENTO .......................................................................................... 33
6.2. CONFIGURACIÓN BÁSICA ................................................................................. 33
6.3. ELEMENTOS ..................................................................................................... 34
6.3.1. Condensadores conmutados por tiristores (TSC) ..................................... 35
6.3.2. Bobinas controladas por tiristores (TCR) .................................................. 35
6.3.3. Bobinas conmutadas por tiristores (TSR) ................................................. 36
6.4. APLICACIONES DEL SVC .................................................................................... 36
7. STATCOM .................................................................................................... 37
7.1. FUNCIONAMIENTO .......................................................................................... 37
7.2. COMPONENTES DE UN STATCOM ................................................................... 38
7.2.1. Inversores ................................................................................................. 38
7.2.1.1. Dispositivos semiconductores controlables ...................................... 38
7.2.1.2. Topologías: ........................................................................................ 39
7.2.1.2.1. Inversor trifásico de seis pulsos .................................................... 39
7.2.1.2.2. Inversor trifásico con tres inversores puente H monofásicos ...... 39
7.2.1.2.3. Inversor trifásico de tres niveles NPC ........................................... 40
7.2.1.3. Frecuencia de conmutación .............................................................. 41
7.2.2. Condensador del Lado DC ........................................................................ 41
7.2.2.1. Topologías ......................................................................................... 41
7.2.3. Transformador .......................................................................................... 42
7.2.3.1. Transformadores zig-zag ................................................................... 43
7.2.3.2. Transformadores estrella-triángulo .................................................. 43
7.3. APLICACIONES .................................................................................................. 44
8. UPFC ........................................................................................................... 45
8.1. ANTECEDENTES ................................................................................................ 45
8.2. CONFIGURACIÓN ............................................................................................. 45
8.3. FUNCIONAMIENTO .......................................................................................... 47
8.4. APLICACIONES .................................................................................................. 47

4
8.5. SSSC .................................................................................................................. 48
8.5.1. Concepto ................................................................................................... 48
8.5.2. Principio de operación .............................................................................. 49
8.5.3. Aplicaciones .............................................................................................. 49
9. FACTS PARA LA MEJORA DE LA ESTABILIDAD TRANSITORIA ......................... 50
9.1. VENTAJAS DEL SVC, STATCOM y UPFC ............................................................ 51
9.1.1. Ventajas del STATCOM frente al SVC ....................................................... 52
9.1.2. Ventajas del UPFC frente al STATCOM ..................................................... 53
9.1.3. Esquema de la comparativa ..................................................................... 53
9.2. COMPARACIÓN DE COSTOS ............................................................................. 54
10. AVR y PSS .................................................................................................... 55
10.1. INTRODUCCIÓN ............................................................................................ 55
10.2. AVR ............................................................................................................... 56
10.2.1. Principio de funcionamiento................................................................. 57
10.2.2. Elementos del AVR ................................................................................ 57
10.3. PSS ................................................................................................................ 58
10.3.1. Surgimiento del PSS .............................................................................. 58
10.3.2. Principio de funcionamiento................................................................. 59
11. IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY .................................. 60
11.1. REDES QUE SE IMPLEMENTAN ..................................................................... 60
11.1.1. Red 1 ..................................................................................................... 60
11.1.2. Red 2 ..................................................................................................... 60
11.1.3. Red 3 ..................................................................................................... 61
11.1.4. Red 4 ..................................................................................................... 61
11.2. COMPONENTES DE LAS REDES ..................................................................... 62
11.2.1. Generador ............................................................................................. 62
11.2.2. Transformador ...................................................................................... 62
11.2.3. Líneas .................................................................................................... 63
11.2.4. Red externa (Nudo infinito en red 1) .................................................... 63
11.2.5. Cargas .................................................................................................... 63
11.3. UBICACIÓN DE LOS FACTS EN LAS REDES .................................................... 63
11.4. SVC ................................................................................................................ 65

5
11.4.1. Componentes y características del SVC ................................................ 65
11.4.1.1. Transformador del SVC ..................................................................... 65
11.4.1.2. Static Var System ............................................................................... 65
11.5. STATCOM ...................................................................................................... 65
11.5.1. Componentes y características del STATCOM ...................................... 65
11.5.1.1. Transformador del STATCOM ........................................................... 65
11.5.1.2. Inversor del STATCOM ...................................................................... 66
11.5.1.3. Condensador del STATCOM .............................................................. 67
11.6. UPFC ............................................................................................................. 67
11.6.1. Componentes y características del UPFC ............................................. 67
11.6.1.1. Transformador serie del UPFC .......................................................... 67
11.6.1.2. Transformador paralelo del UPFC ..................................................... 68
11.6.1.3. Inversor serie del UPFC ..................................................................... 68
11.6.1.4. Inversor paralelo del UPFC ................................................................ 69
11.6.1.5. Condensador del UPFC ...................................................................... 69
11.7. MODELOS Y CONTROLADORES .................................................................... 70
11.7.1. Definiciones .......................................................................................... 70
Composite Model (Modelo compuesto) ...................................................... 70
Composite Frame (Marco compuesto) ........................................................ 70
Common Model (Modelo general) .............................................................. 70
Composite Block Diagram (Diagrama de bloques) ...................................... 70
11.7.2. Generador ............................................................................................. 70
11.7.2.1. AVR .................................................................................................... 72
11.7.2.2. PSS ..................................................................................................... 73
11.7.3. SVC ........................................................................................................ 74
11.7.3.1. SVS ..................................................................................................... 75
11.7.4. STATCOM .............................................................................................. 76
11.7.4.1. Controlador de corriente .................................................................. 77
11.7.4.2. Controlador de tensión DC ................................................................ 78
11.7.5. UPFC ...................................................................................................... 78
11.7.5.1. Serie ................................................................................................... 79
11.7.5.1.1. Controlador de corriente ............................................................ 80

6
11.7.5.1.2. Controlador PQ ........................................................................... 81
11.7.6. Paralelo .............................................................................................. 82
11.7.6.1. Controlador de corriente ............................................................... 83
11.7.6.2. Controlador de tensión DC ............................................................ 84
12. SIMULACIÓN ............................................................................................... 85
12.1. PRIMER CASO ............................................................................................... 85
12.2. SEGUNDO CASO ........................................................................................... 85
12.3. TERCER CASO ................................................................................................ 86
12.4. CUARTO CASO .............................................................................................. 86
12.5. QUINTO CASO: SIMULACIÓN DE INTERÉS .................................................... 86
12.6. RESULTADOS: PRIMER CASO ........................................................................ 87
12.6.1. Red 1 sin FACTS ..................................................................................... 87
12.6.2. Red 1 con SVC, STATCOM y UPFC ......................................................... 87
12.6.2.1. Sincronismo ....................................................................................... 87
12.6.2.2. Velocidad del rotor ............................................................................ 88
12.7. RESULTADOS: SEGUNDO CASO .................................................................... 89
12.7.1. Red 2 sin FACTS ..................................................................................... 89
12.7.2. Red 2 con el SVC.................................................................................... 89
12.7.2.1. Sincronismo ....................................................................................... 89
12.7.2.2. Velocidad del rotor ............................................................................ 90
12.7.3. Red 2 con el STATCOM.......................................................................... 90
12.7.3.1. Sincronismo ....................................................................................... 90
12.7.3.2. Velocidad del rotor ............................................................................ 91
12.7.4. Red 2 con el UPFC ................................................................................. 91
12.7.4.1. Sincronismo ....................................................................................... 91
12.7.4.2. Velocidad del rotor ............................................................................ 92
12.7.5. Red 2 (generador G3) con SVC vs STATCOM vs UPFC .......................... 93
12.7.5.1. Sincronismo ....................................................................................... 93
12.7.5.2. Velocidad del rotor ............................................................................ 93
12.8. RESULTADOS: TERCER CASO ........................................................................ 94
12.8.1. Red 3 sin FACTS ..................................................................................... 94
12.8.2. Red 3 con el SVC.................................................................................... 94
12.8.2.1. Sincronismo ....................................................................................... 94

7
12.8.2.2. Velocidad del rotor ............................................................................ 95
12.8.3. Red 3 con STATCOM ............................................................................. 96
12.8.3.1. Sincronismo ....................................................................................... 96
12.8.3.2. Velocidad del rotor ............................................................................ 96
12.8.4. Red 3 con UPFC ..................................................................................... 97
12.8.4.1. Sincronismo ....................................................................................... 97
12.8.4.2. Velocidad del rotor ............................................................................ 97
12.8.5. Red 3 (generador G2) con SVC, STATCOM y UPFC ............................... 98
12.8.5.1. Sincronismo ....................................................................................... 98
12.8.5.2. Velocidad del rotor ............................................................................ 98
12.9. RESULTADOS: CUARTO CASO ....................................................................... 99
12.9.1. Red 4 sin FACTS ..................................................................................... 99
12.9.2. Red 4 con el SVC.................................................................................... 99
12.9.3. Red 4 con el STATCOM........................................................................ 100
12.9.4. Red 4 con el UPFC ............................................................................... 100
12.10. RESULTADOS: QUINTO CASO, SIMULACIÓN DE INTERÉS .......................... 102
12.10.1. Red 5 sin FACTS ................................................................................... 102
12.10.2. Red 5 con FACTS ................................................................................. 102
12.10.3. Interconexiones internacionales de España ....................................... 104
13. CONCLUSIÓN ............................................................................................. 105
14. BIBLIOGRAFÍA ........................................................................................... 107

8
Índice de ilustraciones
Ilustración 1: Ángulo del rotor tras una perturbación ................................................... 18
Ilustración 2: Clasificación de estabilidad de un SEP [4] ................................................ 20
Ilustración 3: Sistema de prueba con 9 nodos y 3 generadores .................................... 22
Ilustración 4: Sistema de prueba con corte de flujo ...................................................... 22
Ilustración 5: Sistema máquina nudo infinito ................................................................ 23
Ilustración 6: Curvas de oscilación de tres generadores ................................................ 25
Ilustración 7: FACTS primera generación paralelo ......................................................... 27
Ilustración 8: FACTS primera generación serie............................................................... 27
Ilustración 9: FACTS de segunda generación paralelo STATCOM ........................... 28
Ilustración 10: FACTS de segunda generación serie - SSSC ........................................ 28
Ilustración 11: FACTS tercera generación UPFC ............................................................. 28
Ilustración 12: FACTS cuarta generación IPFC ................................................................ 29
Ilustración 13: TABLA: Dispositivos FACTS y convencionales [11] ................................ 29
Ilustración 14: Clasificación de FACTS según dispositivo semiconductor ...................... 30
Ilustración 15: Configuración del SVC............................................................................. 34
Ilustración 16: Esquema simplificado para un SVC ........................................................ 34
Ilustración 17: Esquema de TSC...................................................................................... 35
Ilustración 18: Esquema de TCR ..................................................................................... 35
Ilustración 19: Esquema del STATCOM .......................................................................... 37
Ilustración 20: Diagrama fasorial de operación capacitiva del STATCOM ..................... 37
Ilustración 21: Diagrama fasorial de operación inductiva del STATCOM ....................... 37
Ilustración 22: Símbolo general GTO (a) e IGBT (b) ........................................................ 38
Ilustración 23: Inversor trifásico de 6 pulsos .................................................................. 39
Ilustración 24: Inversor trifásico con tres inversores puente H ..................................... 40
Ilustración 25: Inversor de tres niveles NPC ................................................................... 40
Ilustración 26: Topología de un condensador del lado DC ............................................. 42
Ilustración 27: Topología con condensador individual para cada inversor .................... 42
Ilustración 28: STATCOM de 24 pulsos utilizando transformadores zig-zag .................. 43
Ilustración 29: Diagrama de STATCOM cuasi-24 pulsos (conexión estrella -triángulo) . 44
Ilustración 30: Configuración del UPFC .......................................................................... 45
Ilustración 31: Diagrama fasorial de operación del UPFC a) Regulación de voltaje, b)
Compensación de impedancia de la línea, c) Cambiador de fase, d) Control simultáneo
de tensión, impedancia y ángulo .................................................................................... 46
Ilustración 32: Esquema del SSSC ................................................................................... 48
Ilustración 33: Diagrama fasorial de operación del SSSC a) Modo capacitiva, b) Modo
inductivo ......................................................................................................................... 48
Ilustración 34: a) Curva tensión intensidad para el SVC, b) Curva tensión intensidad para
el STATCOM c) STATCOM ocupa menos espacio que el SVC [16] .................................. 52

9
Ilustración 35: Ventajas del UPFC vs STATCOM ............................................................. 53
Ilustración 36: Aplicaciones del SVC, STATCOM y UPFC ................................................ 53
Ilustración 37: Costo para dispositivos FACTS [44] ........................................................ 54
Ilustración 38: Esquema del AVR .................................................................................... 57
Ilustración 39: Elementos del AVR ................................................................................. 58
Ilustración 40: Surgimiento del PSS ................................................................................ 59
Ilustración 41: Esquema de AVR más PSS ...................................................................... 59
Ilustración 42: Red 1 ....................................................................................................... 60
Ilustración 43: Red 2 ....................................................................................................... 61
Ilustración 44: Red 3 ....................................................................................................... 61
Ilustración 45: Red 4 ....................................................................................................... 62
Ilustración 46: Ubicación de los FACTS en la Red 1 ........................................................ 64
Ilustración 47: Ubicación de los FACTS en la Red 2 y en la Red 3 .................................. 64
Ilustración 48: Ubicación de los FACTS en la Red 4 ........................................................ 64
Ilustración 49: Datos del transformador en el SVC ....................................................... 65
Ilustración 50: Datos del Static Var System en el SVC .................................................... 65
Ilustración 51: Datos del transformador en el STATCOM .............................................. 66
Ilustración 52: Datos del inversor en el STATCOM ......................................................... 66
Ilustración 53: Datos del condensador en el STATCOM ................................................. 67
Ilustración 54: Datos de transformador serie en el UPFC .............................................. 67
Ilustración 55: Datos de transformador paralelo en el UPFC ......................................... 68
Ilustración 56: Datos del inversor serie del UPFC .......................................................... 68
Ilustración 57: Datos del inversor paralelo del UPFC ..................................................... 69
Ilustración 58: Datos del condensador para el UPFC ..................................................... 69
Ilustración 59: Composite Frame - Conexionado para el Generador ............................. 71
Ilustración 60: Composite Model – Interfaz para el generador y sus controles ............ 72
Ilustración 61: Diagrama de bloques del AVR ................................................................ 72
Ilustración 62: Common Model del AVR ........................................................................ 73
Ilustración 63: Diagrama de bloques del PPS ................................................................. 73
Ilustración 64: Common Model del PSS ......................................................................... 74
Ilustración 65: Composite Frame para el SVC ................................................................ 74
Ilustración 66: Composite Model para el SVC y para sus controladores ...................... 75
Ilustración 67: Diagrama de bloques - Controlador del SVS .......................................... 75
Ilustración 68: Common Model - Controlador del SVS.................................................. 76
Ilustración 69: Composite Frame para el STATCOM ...................................................... 76
Ilustración 70: Composite Model del STATCOM y sus Controladores ........................... 77
Ilustración 71: Common Model - Controlador de corriente del STATCOM .................. 77
Ilustración 72: Diagrama de bloques - Controlador de corriente del STATCOM .......... 77
Ilustración 73: Diagrama de bloques - Controlador de tensión DC del STATCOM ........ 78
Ilustración 74: Common Model - Controlador de tensión DC del STATCOM ............... 78
Ilustración 75: Composite Frame - SSSC del UPFC ......................................................... 79

10
Ilustración 76: Composite Model - SSSC y sus controladores en UPFC ......................... 79
Ilustración 77: Diagrama de bloques - Controlador de corriente para el SSSC del UPFC
........................................................................................................................................ 80
Ilustración 78: Common Model - Controlador de corriente para el SSSC del UPFC ...... 80
Ilustración 79: Diagrama de bloques - Controlador PQ para SSSC del UPFC ................. 81
Ilustración 80: Common Model - Controlador PQ para SSSC del UPFC ......................... 81
Ilustración 81: Composite Frame - STATCOM del UPFC ................................................ 82
Ilustración 82: Composite Model - STATCOM y sus controladores en UPFC ................ 82
Ilustración 83: Diagrama de bloques - Controlador de corriente para el STATCOM del
UPFC ................................................................................................................................ 83
Ilustración 84: Common Model - Controlador de corriente para el STATCOM del UPFC
........................................................................................................................................ 83
Ilustración 85: Diagrama de bloques - Controlador de tensión DC para el STATCOM del
UPFC ................................................................................................................................ 84
Ilustración 86: Common Model - Controlador de tensión DC para el STATCOM del UPFC
........................................................................................................................................ 84
Ilustración 87: Cortocircuito en una línea entre los buses AT() y AT CARGA para la Red 1
........................................................................................................................................ 85
Ilustración 88: Cortocircuito en una línea entre los buses 7 () y 5 para la Red 2 ........... 85
Ilustración 89: Cortocircuito en una línea entre los buses 7 () y 5 para la Red 3 ........... 86
Ilustración 90: Cortocircuito en una línea entre los buses 2 y 3 para la Red 4 .............. 86
Ilustración 91: Primer caso. Ángulo del rotor – Red 1 sin FACTS Ilustración 92: Primer
caso. Velocidad del rotor - Red 1 sin FACTS ................................................................... 87
Ilustración 93: Primer caso. Ángulo del rotor – Red 1 con SVC, STATCOM y UPFC (Línea
de 300 km) ...................................................................................................................... 88
Ilustración 94: Primer caso. Ángulo del rotor – Red 1 con SVC, STATCOM y UPFC (Línea
de 400 km) ...................................................................................................................... 88
Ilustración 95: Primer caso. Velocidad del rotor - Red 1 con SVC, STATCOM y UPFC (línea
de 300 km) ...................................................................................................................... 88
Ilustración 96: Primer caso. Velocidad del rotor - Red 1 con SVC, STATCOM y UPFC (línea
de 400 km) ...................................................................................................................... 88
Ilustración 97: Segundo caso. Ángulo del rotor de G1, G2 y G3 en la Red 2 sin FACTS . 89
Ilustración 98: Segundo caso. Velocidad del rotor de G1 G2 y G3 en la Red 2 sin FACTS
........................................................................................................................................ 89
Ilustración 99: Segundo caso. Ángulo del rotor de G1, G2 y G3 en la Red 2 con el SVC
(línea de 300 km) ............................................................................................................ 89
Ilustración 100: Segundo caso. Ángulo del rotor de G1, G2 y G3 en la Red 2 con el SVC
(línea de 400 km) ............................................................................................................ 89
Ilustración 101: Segundo caso. Velocidad del rotor de G1, G2 y G3 en la Red 2 con el SVC
(línea de 300 km) ............................................................................................................ 90

11
Ilustración 102: Segundo caso. Velocidad del rotor de G1, G2 y G3 en la Red 2 para el
SVC (línea de 400 km) ..................................................................................................... 90
Ilustración 103: Segundo caso. Ángulo del rotor de G1, G2 y G3 en la Red 2 con el
STATCOM (línea de 300 km) ........................................................................................... 90
Ilustración 104: Segundo caso. Ángulo del rotor de G1, G2 y G3 en la Red 2 con el
STATCOM (línea de 400 km) ........................................................................................... 90
Ilustración 105: Segundo caso. Velocidad del rotor de G1, G2 y G3 en la Red 2 con el
STATCOM (línea de 300 km) ........................................................................................... 91
Ilustración 106: Segundo caso. Velocidad del rotor de G1, G2 y G3 en la Red 2 con el
STATCOM (línea de 400 km) ........................................................................................... 91
Ilustración 107: Segundo caso. Ángulo del rotor de G1, G2 y G3 en la Red 2 con el UPFC
(línea de 300 km) ............................................................................................................ 92
Ilustración 108: Segundo caso. Ángulo del rotor de G1, G2 y G3 en la Red 2 con el UPFC
(línea de 400 km) ............................................................................................................ 92
Ilustración 109: Segundo caso. Velocidad del rotor de G1, G2 y G3 en la Red 2 con el
UPFC (línea de 300 km) .................................................................................................. 92
Ilustración 110: Segundo caso. Velocidad del rotor de G1, G2 y G3 en la Red 2 con el
UPFC (línea de 400 km) .................................................................................................. 92
Ilustración 111: Segundo caso. Ángulo del rotor de G3 en la Red 2 con SVC, STATCOM y
UPFC (línea de 300 km) .................................................................................................. 93
Ilustración 112: Segundo caso. Ángulo del rotor de G3 en la Red 2 con SVC, STATCOM y
UPFC (línea de 400 km) .................................................................................................. 93
Ilustración 113: 2do Caso, velocidad del rotor de G3 en la Red 2 con SVC, STATCOM y
UPFC (línea de 300 km) .................................................................................................. 94
Ilustración 114: 2do Caso, ángulo del rotor de G3 en la Red 2 con SVC, STATCOM y UPFC
(línea de 400 km) ............................................................................................................ 94
Ilustración 115: Tercer caso. Ángulo del rotor de G1, G2 y G3 en la Red 3 sin FACTS ... 94
Ilustración 116: Tercer caso. Velocidad del rotor de G1, G2 y G3 en la Red 3 sin FACTS
........................................................................................................................................ 94
Ilustración 117: Tercer caso. Ángulo del rotor de G1, G2 y G3 en la Red 3 con el SVC (línea
de 300 km) ...................................................................................................................... 95
Ilustración 118: Tercer caso. Ángulo del rotor de G1, G2 y G3 en la Red 3 con el SVC (línea
de 400 km) ...................................................................................................................... 95
Ilustración 119: Tercer caso. Velocidad del rotor de G1, G2 y G3 en la Red 3 con el SVC
(línea de 300 km) ............................................................................................................ 95
Ilustración 120: Tercer caso. Velocidad del rotor de G1, G2 y G3 en la Red 3 con el SVC
(línea de 400 km) ............................................................................................................ 95
Ilustración 121: Tercer caso. Ángulo del rotor de G1, G2 y G3 en la Red 3 con el STATCOM
(línea de 300 km) ............................................................................................................ 96
Ilustración 122: Tercer caso. Ángulo del rotor de G1, G2 y G3 en la Red 3 con el STATCOM
(línea de 400 km) ............................................................................................................ 96

12
Ilustración 123: Tercer caso. Velocidad del rotor de G1, G2 y G3 en la Red 3 con el
STATCOM (línea de 300 km) ........................................................................................... 96
Ilustración 124: Tercer caso. Velocidad del rotor de G1, G2 y G3 en la Red 3 con el
STATCOM (línea de 400 km) ........................................................................................... 96
Ilustración 125: Tercer caso. Ángulo del rotor de G1, G2 y G3 en la Red 3 con el UPFC
(línea de 300 km) ............................................................................................................ 97
Ilustración 126: Tercer caso. Ángulo del rotor de G1, G2 y G3 en la Red 3 con el UPFC
(línea de 400 km) ............................................................................................................ 97
Ilustración 127: Tercer caso. Velocidad del rotor de G1, G2 y G3 en la Red 3 con el UPFC
(línea de 300 km) ............................................................................................................ 97
Ilustración 128: Tercer caso. Velocidad del rotor de G1, G2 y G3 en la Red 3 con el UPFC
(línea de 400 km) ............................................................................................................ 97
Ilustración 129: Tercer caso. Ángulo del rotor de G2 en la Red 3 con SVC, STATCOM y
UPFC (línea de 300 km) .................................................................................................. 98
Ilustración 130: Tercer caso. Ángulo del rotor de G2 en la Red 3 con SVC, STATCOM y
UPFC (línea de 400 km) .................................................................................................. 98
Ilustración 131: Tercer caso. Ángulo del rotor de G2 en la Red 3 con SVC, STATCOM y
UPFC (línea de 300 km) .................................................................................................. 99
Ilustración 132: Tercer caso. Ángulo del rotor de G2 en la Red 3 con SVC, STATCOM y
UPFC (línea de 400 km) .................................................................................................. 99
Ilustración 133: Cuarto caso. Ángulo de rotor y velocidad de G1, G2 y G3 en la Red 4 sin
FACTS (línea de 1000 km) ............................................................................................... 99
Ilustración 134: Cuarto caso. Ángulo de rotor y velocidad de G1, G2 y G3 en la Red 4 con
SVC (línea de 1000 km) ................................................................................................. 100
Ilustración 135: Cuarto caso. Ángulo de rotor y velocidad de G1, G2 y G3 en la Red 4 con
STATCOM (línea de 1000 km) ....................................................................................... 100
Ilustración 136: Cuarto caso. Ángulo de rotor y velocidad de G1, G2 y G3 en la Red 4 con
UPFC (línea de 1000 km) .............................................................................................. 101
Ilustración 137: Red 5 (posición de los FACTS y de la gran perturbación) ................... 102
Ilustración 138: Sincronismo y velocidad del rotor de G1, G2 y G3 tras el cortocircuito
en línea de 1000 km de longitud en la Red 5 sin FACTS e intercambio de potencia entre
áreas de 3000 MW ....................................................................................................... 102
Ilustración 139: Sincronismo y velocidad del rotor de G1, G2 y G3 tras el cortocircuito
en línea de 1000 km de longitud en la Red 5 con SVC e intercambio de potencia entre
áreas de 3000 MW ....................................................................................................... 103
Ilustración 140: Sincronismo y velocidad del rotor de G1, G2 y G3 tras el cortocircuito
en línea de 1000 km de longitud en la Red 5 con STATCOM e intercambio de potencia
entre áreas de 3000 MW .............................................................................................. 103
Ilustración 141: Sincronismo y velocidad del rotor de G1, G2 y G3 tras el cortocircuito en
línea de 1000 km de longitud en la Red 5 con UPFC e intercambio de potencia entre
áreas de 3000 MW ....................................................................................................... 103

13
Ilustración 142: Intercambio comercial previsto para 2016 [32] ................................. 104
Glosario
AC Corriente Alterna
AVR Regulador Automático de Tensión
EPRI Instituto de Investigación de Energía y Potencia
FACTS Sistemas de Transmisión Flexible de Corriente Alterna
GTO Transistores GTO
HiGT IGBT de Alta Conductividad
HVDC Corriente Continua de Alta Tensión
IEEE Instituto de Ingeniería Eléctrica y Electrónica
IEGT IGBT con Inyección Mejorada
IGBT Transistor Bipolar de Puerta Aislada
IPFC Controlador de Flujo de Potencia Interlínea
PAR Transformadores Reguladores de Ángulo
PSS Estabilizador de Sistema de Potencia
SSSC Compensador Estático Síncrono en Serie
STATCOM Compensador Estático Síncrono
SVC Compensador Estático de Potencia Reactiva
TCR Reactancia Controlada por Tiristores
TCSC Condenador Serie Controlado por Tiristores
TFM Trabajo Fin de Máster
TSC Condensador Conmutado por Tiristores
TSR Condensador Conmutados por Tiristores
TSSC Condenador Serie Conmutado por Tiristores
UPFC Controlador Unificado de Flujo de Potencia
VSC Inversor de Fuente de Tensión

14

I Introducción
15
1. INTRODUCCIÓN
Desde que se descubrió la energía eléctrica -así como sus múltiples aplicaciones
para el beneficio del hombre- ésta ha desempeñado un rol muy importante en el
desarrollo de la humanidad. Aunque se presentaron dificultades para llevarla desde las
fuentes hasta el consumidor final, la mejor definición es la que ofrece la IEEE quien fija
el sistema de potencia como la “red eléctrica de potencia que se encarga de generar,
transmitir y distribuir la energía eléctrica, hasta los consumidores”.
La continua demanda de energía tiene un crecimiento exponencial; para
producir más energía se está incorporando la generación distribuida y, principalmente,
la de las tecnologías renovables. Como resultado, tenemos que usar las líneas AC de
trasmisión en redes de sistemas de potencia existentes de una manera eficiente.
Desde el principio, la estabilidad ha sido considerada uno de los problemas más
importantes en los sistemas eléctricos de potencia [20]. La estabilidad transitoria es la
capacidad que posee el sistema de potencia para mantener el sincronismo cuando éste
se ve sometido a grandes perturbaciones como cortocircuitos trifásicos, cambios
imprevistos de generación o pérdida de grandes cargas. La respuesta del sistema
resultante implica un cambio en los ángulos del rotor de los generadores y se rige por la
relación no lineal de ángulo y de potencia [45].
El reciente desarrollo así como el uso de los FACTS en sistemas de transmisión
de potencia han generado diversas aplicaciones de éstos como, por ejemplo, mejorar la
estabilidad de las redes de potencia. Diversos equipos FACTS están bajo desarrollo e
incluso algunos ya se encuentran a disposición basándose en interruptores de estado
sólido con tiristores convencionales y fuente de tensión inversora con interruptores
GTO. Estos equipos proporcionan controlabilidad a las redes de transporte AC.
Los FACTS en serie y en derivación juegan un papel muy importante puesto que
controlan la absorción y la generación de potencia reactiva en la que la salida se puede
variar para controlar los parámetros específicos de un sistema eléctrico de potencia.
Los dispositivos FACTS han sido clasificados predominantemente en dos
categorías: el primero basado en reactancia conmutada por tiristor como el SVC y por
otro los STATCOM, los SSSC y el UPFC que emplean electrónica de potencia basada en
inversores de fuente de tensión (VSC).

II Motivación y objetivos
16
2. MOTIVACIÓN Y OBJETIVOS
El rápido proceso de transformación en el que se encuentra el mercado de la
energía ha confrontado a los operadores de sistemas de transmisión de alta tensión con
nuevas oportunidades y desafíos. Estos últimos son, principalmente, el resultado del
gran crecimiento de la transferencia de energía entre compañías de electricidad y la
liberación del mercado así como de los impuestos medioambientales para la
construcción de nuevas instalaciones de transporte. Las actuales redes de transporte de
corriente alterna no se concibieron en su momento para poder controlar fácilmente la
tensión y el flujo de energía en un mercado liberalizado, el resultado es que en ellas
aparecen problemas de control en régimen permanente así como problemas de
estabilidad dinámica. El desarrollo de los sistemas FACTS (Flexible AC Transmissions
Systems) basados en la electrónica de potencia ofrecen un nuevo y potente medio para
afrontar con éxito los nuevos desafíos.
La demanda de energía eléctrica continúa incrementándose sin cesar,
especialmente en los países que se encuentran en el umbral de la industrialización. Por
diversas razones, las redes de energía eléctrica -y en especial la construcción de nuevas
líneas de transporte- no pueden mantener el ritmo del aumento en la capacidad de las
centrales eléctricas ni tampoco el incremento que supone la demanda de energía.
Conseguir las servidumbres de paso adecuados es especialmente difícil en los países
industrializados y obtener los permisos necesarios requiere mayor dilación en el tiempo.
Además, la construcción de líneas de transporte de energía implica inmovilizar capitales
que podrían invertirse en otros proyectos.
Debido a esta situación, los operadores están buscando la forma de utilizar de
una manera más eficiente las líneas de transporte de energía ya existentes. Hay dos
campos que requieren una especial atención: en primer lugar, existe una necesidad de
mejorar la estabilidad de las líneas de gran longitud, tanto en régimen transitorio como
en régimen permanente. Esto se debe a que algunas líneas de transporte de energía no
pueden recibir una carga próxima a su capacidad nominal y mucho menos a su límite
térmico nominal debido a que sus límites de estabilidad son relativamente bajos. Las
medidas que se han tomado para mejorar la estabilidad -durante y después de una
avería de la línea- pueden mejorar la fiabilidad del sistema tanto como añadir una o más
líneas complementarias.
En segundo lugar, es necesario mejorar el flujo de carga en redes estrechamente
interconectadas ya que el flujo «natural» de carga -resultante de las condiciones de
carga y de las impedancias dadas de línea- no es necesariamente el flujo para el que son
mínimas las pérdidas de transporte.

II Motivación y objetivos
17
Otro aspecto importante es la flexibilidad: la liberalización del mercado de la
energía requiere utilizar sistemas de transmisión flexibles para asegurar el cumplimiento
de los contratos de suministro de electricidad. Los sistemas flexibles de transmisión de
corriente alterna, los llamados FACTS, tienen toda la capacidad que necesitan los
operadores de redes de energía eléctrica para afrontar los retos que trae consigo un
mercado energético en rápido cambio.
El estudio y desarrollo de equipos para mejorar la estabilidad transitoria en redes
de transporte y distribución van de la mano con el desarrollo de la electrónica de
potencia ya que este último ayudó a desarrollar el equipamiento que otorga mayor
flexibilidad al control de los sistemas eléctricos. El gran potencial de beneficios, así como
la flexibilidad que brindan los FACTS, son ampliamente reconocidos por la ingeniería de
sistemas de potencia [21].
En la actualidad, uno de los FACTS más utilizados para fenómenos de estabilidad
transitoria es el STATCOM [10] aunque también hay estudios que utilizan otros tipos de
FACTS como son SVC (Static Var Compensator), UPFC (Unified Power Flow Controller),
SSSC (Static Synchronous Series Compensator), HVDC (Hight Voltage DC), etcétera.
Entre todos los dispositivos FACTS, el UPFC es uno de los más versátiles ya que
puede controlar de manera simultánea la impedancia de la red, la tensión y el ángulo en
el bus y el flujo de potencia a través de la línea de transmisión con el fin de lograr el
rendimiento óptimo de sistema de potencia [46].
Teniendo en consideración todo lo mencionado anteriormente se plantean los
siguientes objetivos:
Conocer a grandes rasgos el origen y desarrollo de los FACTS.
Describir el SVC, STATCOM y UPFC.
Simular y comparar (como objetivos primordiales del TFM) la respuesta
transitoria de dos áreas interconectadas a través de una línea de gran longitud
al ser sometida a una gran perturbación (cortocircuito trifásico) y haciendo uso
o no de los FACTS (STATCOM o SVC o UPFC) mediante el programa Digsilent -
Power Factory.

III ESTABILIDAD TRANSITORIA
18
3. ESTABILIDAD TRANSITORIA
3.1. CONCEPTO
La estabilidad transitoria es la capacidad del sistema eléctrico para mantener el
sincronismo cuando es sometido a una gran perturbación [1], por ejemplo, una falta en
la red de transporte, una pérdida de generación o una pérdida de una cantidad
importante de carga.
El sistema eléctrico responde a una perturbación de estas características
mediante grandes variaciones de los ángulos de los generadores síncronos y grandes
oscilaciones de los flujos de potencia, de las tensiones y de otras variables del sistema.
Si la separación angular entre generadores síncronos permanece acotada, entonces, el
sistema mantiene el sincronismo. En el caso contrario, pierde el sincronismo, lo cual
suele hacerse evidente transcurridos dos o tres segundos desde la perturbación.
En la ilustración 1 se tiene tres ejemplos:
a: El ángulo del rotor pierde el sincronismo.
b: El ángulo del rotor oscila cada vez con más amplitud y pierde el sincronismo.
c: El ángulo del rotor oscila cada vez con menor amplitud y mantiene el sincronismo.
Ilustración 1: Ángulo del rotor tras una perturbación

III ESTABILIDAD TRANSITORIA
19
3.2. ANÁLISIS DE LA ESTABILIDAD TRANSITORIA
Para analizar la estabilidad transitoria, usualmente, se calcula la evolución del
ángulo del rotor de cada máquina mediante una integración paso a paso de las
ecuaciones diferenciales no lineales del sistema [2]. Se diagnostica que el sistema es
estable si los ángulos de todas las máquinas convergen en un momento dado. La
evolución del sistema eléctrico de potencia en el tiempo queda enteramente definida
por la condición inicial, los parámetros eléctricos de la red, los parámetros eléctricos y
mecánicos de las máquinas así como la condición relativa de éstos (ángulos y
velocidades) en el instante en que se elimina la perturbación. Esto ha llevado
a la búsqueda de modelos matemáticos para diagnosticar la estabilidad del sistema.
3.3. SIMULACIONES EN EL DOMINIO DEL TIEMPO PARA ESTUDIAR
LA ESTABILIDAD TRANSITORIA
El estudio de la estabilidad transitoria del sistema debe hacerse en función de las
diferencias de ángulos de cada máquina respecto a una elegida como referencia. Lo que
en realidad interesa es el movimiento estable del conjunto de máquinas antes de que
comiencen a actuar los reguladores de velocidad que, finalmente, ubican al sistema en
su nivel de operación permanente a frecuencia nominal. Este movimiento estable
se logra si las diferencias de los ángulos se mantienen constantes o casi constantes, aun
cuando las velocidades sean diferentes a la velocidad sincrónica y las aceleraciones sean
distintas de cero [2].
En la práctica, el método más útil para analizar la estabilidad transitoria de los
sistemas eléctricos consiste en representar las ecuaciones diferenciales que rigen el
comportamiento dinámico de los distintos elementos e integrarlas numéricamente con
la ayuda de una herramienta informática.
3.3.1. Modelo dinámico del sistema eléctrico
En los programas de simulación de sistemas eléctricos para estudios de
estabilidad transitoria el esfuerzo de computación suele ser elevado. Para saber si los
generadores síncronos de un sistema permanecen en sincronismo después de una
perturbación se simulan, normalmente, entre 10 y 30 segundos. Teniendo en cuenta
que el tamaño de las redes de transporte simuladas asciende frecuentemente a varios
miles de nudos es natural que los modelos utilizados traten de preservar tan solo
aquellos fenómenos relevantes para la estabilidad del sistema y que desprecien aquellos
fenómenos cuyo efecto sobre la estabilidad es muy pequeño. En particular, despreciar

III ESTABILIDAD TRANSITORIA
20
fenómenos muy rápidos ayuda a reducir el esfuerzo de computación puesto que permite
emplear pasos de integración mayores.
Con el fin de reducir los tiempos de simulación así como la ocupación de memoria
-dado que su influencia sobre la estabilidad del sistema es muy pequeña- los programas
informáticos de simulación dinámica para estudios de estabilidad desprecian los
transitorios electromagnéticos en las reactancias y capacidades de la red [3]. Esto quiere
decir que los transitorios en estos elementos ocurren infinitamente rápidos o, dicho de
otro modo, que las corrientes en las bobinas y las tensiones en los condensadores
alcanzan inmediatamente su régimen permanente.
En resumen, las siguientes afirmaciones respecto a los programas para estudios
de estabilidad transitoria son equivalentes aunque a primera vista parezcan distintas:
Desprecian los transitorios electromagnéticos en la Red.
Solo representan la componente fundamental de 50 Hz de las variables
eléctricas.
Representan la Red mediante fasores.
Ilustración 2: Clasificación de estabilidad de un SEP [4]

IV EQUIVALENTE DINÁMICO
21
4. EQUIVALENTE DINÁMICO
4.1. INTRODUCCIÓN
El principal problema en los estudios de estabilidad es lidiar con una gran
cantidad de datos para sistemas altamente interconectados y muy extensos [5] por lo
que obtener una reducción del tamaño del sistema externo aporta grandes ventajas al
realizar dichos estudios. La reducción de esta parte del sistema, además de presentar
una diminución en la cantidad de datos, debe mostrar el impacto del comportamiento
entre las áreas externa e interna que se dan con el sistema completo. Una vez que se ha
obtenido un sistema reducido del área externa debe ser posible simular fallos o cambios
de configuración de la red así como pérdidas de generación o de carga en el área de
estudio obteniendo resultados que se asemejen lo más posible a los que se obtendrían
realizando estos cambios en el sistema original.
Un equivalente dinámico es un modelo simplificado de orden reducido del
sistema externo. En él se maneja un número menor tanto de ecuaciones algebraicas
como de diferenciales para representar el área externa y por lo tanto comprende uno o
más generadores equivalentes y una red equivalente.
El equivalente dinámico tiene la estructura de un sistema de potencia real por lo
que puede ser representado físicamente. También pueden ser de ayuda en todos
aquellos fenómenos donde interviene de forma importante la dinámica de los
generadores síncronos conectados a una Red como los son problemas de estabilidad,
sincronismo, control carga-frecuencia, entre otros. Otro de los puntos importantes de
un equivalente dinámico es que éste es válido para un punto de operación específico,
por lo que se pueden obtener diferentes equivalentes para distintos puntos de
operación.
4.2. TIPOS DE EQUIVALENTES
Uno de los pasos más importantes en la formación de equivalentes dinámicos es la
división del sistema en dos: el área de estudio y el área externa. La obtención del
equivalente dinámico se centra en el área externa, la cual es la parte del sistema a
reducir. Los métodos mediante los cuales se pueden producir un equivalente del área
externa pueden dividirse ampliamente en dos grupos dependiendo de si se requiere o
no del conocimiento tanto de la configuración como de los parámetros del área externa.
Los métodos que no requieren ningún conocimiento del área externa son usados
para realizar evaluación de seguridad; ellos se encargan de tomar mediciones de
cantidades eléctricas de elementos que se encuentran en el área de estudio y en los
nodos frontera de éste con el área externa.

IV EQUIVALENTE DINÁMICO
22
Los métodos que requieren conocimiento del área externa son los llamados
métodos de modelos reducidos y se utilizan, principalmente, para análisis sin conexión
(off line) del sistema.
4.3. MÉTODOS PARA DESARROLLAR EQUIVALENTES
4.3.1. Simplificaciones empíricas
La construcción de equivalentes dinámicos se ha basado en aproximaciones
empíricas, las cuales involucran la modificación de equivalentes estáticos para, así,
poder aproximar los efectos dinámicos de los generadores.
El método consiste en realizar un estudio de flujos y obtener las potencias que
fluyen entre nodos por las líneas del sistema, localizar las líneas que interconectan las
áreas de estudio y el área externa para luego sustituirlas por cargas con un valor de
potencia activa y reactiva igual a la obtenida en el estudio de flujos [5].
Ilustración 3: Sistema de prueba con 9 nodos y 3 generadores
Ilustración 4: Sistema de prueba con corte de flujo

IV EQUIVALENTE DINÁMICO
23
4.3.2. Máquina nudo infinito
Otra de las formas en que se puede construir un equivalente dinámico es
mediante el uso de un sistema máquina nudo infinito (ilustración 5) ya que los
generadores sincrónicos se usan en muy raras ocasiones para alimentar cargas
individuales y, comúnmente, se conectan a un sistema de potencia. El nudo infinito es
la idealización de un sistema de potencia tan grande que su voltaje y su frecuencia no
sufren cambios. Además, puede consumir o suministrar la cantidad de potencia activa y
reactiva que la máquina requiera. El nudo infinito puede verse como una gran máquina
equivalente de dimensiones elevadas a la que ningún fallo produce efecto considerable
en ella.
Así, Zeq es una impedancia equivalente del sistema de potencia donde se
incluyen varias líneas de transporte, transformadores y cargas. Por su parte, G es una o
más máquinas síncronas conectadas al nudo infinito y Vt y Vbinf son respectivamente
los voltajes terminales de la máquina síncrona y la magnitud del nudo infinito.
Ilustración 5: Sistema máquina nudo infinito
4.3.3. Métodos modales
La aplicación de los métodos modales tiene como base el principio general de
dividir el sistema en dos áreas: una de estudio y una externa. Una vez realizado esto, el
sistema externo se modela mediante ecuaciones algebraicas que describen el
comportamiento de la red y un conjunto de ecuaciones diferenciales que modelan los
efectos electromecánicos y dinámicos de los generadores, así como sus controles, los
cuales están interconectados a la Red.
La construcción del equivalente involucra tres pasos principales: la construcción
de un conjunto general de ecuaciones algebraicas y diferenciales del sistema externo, la
separación de los modos naturales mediante transformaciones de este conjunto general

IV EQUIVALENTE DINÁMICO
24
de ecuaciones en su forma canónica y, por último, la reducción del orden de las
ecuaciones en su forma canónica.
El atractivo de los métodos modales es que tienen una base matemática rigurosa
y muestran los modos de oscilación presentes en el sistema. Además, los métodos
modales tiene la posibilidad de controlar el tamaño del equivalente de una forma
sistemática. Una desventaja de las técnicas modales es que para la simulación del
sistema completo se debe hacer una interfaz para el modelo no lineal del sistema de
estudio con el equivalente obtenido para el área externa. Asimismo, el equivalente es
de naturaleza abstracta y tiene limitaciones debido a la linealidad del modelo.
4.3.4. Basado en coherencia
Los métodos basados en coherencia utilizan reducciones físicas y topológicas que
aprovechan la redundancia de las ecuaciones del sistema para reducirlo, y
particularmente, se valen de la existencia de grupos de generadores coherentes para
sustituirlos por un solo generador equivalente.
La coherencia es un término utilizado para describir el comportamiento que
pueden tener nodos y máquinas interconectadas. Los generadores tienden a oscilar en
fase mientras que los nodos tienden a mantener una magnitud de voltaje constante,
aunque ambos casos deben darse para el estado estable y transitorio.
4.3.4.1. Coherencia entre generadores
La coherencia está basada en el comportamiento angular de la máquina por lo
que es importante el entendimiento de la misma. El ángulo de carga es una de la
variables tomadas para determinar la estabilidad angular transitoria de un sistema y está
ligada al rotor de la máquina ya que gira a la misma velocidad que éste, definido como
la diferencia angular formada entre el campo del rotor y el campo del estator medido
con respecto a una referencia que gira a la velocidad síncrona.
En general, el concepto de coherencia es aplicado solamente a los nodos de
generación en un sistema y se dice que dos máquinas son coherentes si la diferencia
angular entre ellas permanece constante o igual a una tolerancia.
En la ilustración 6 pueden observarse las curvas de oscilación de tres
generadores. Los generadores 𝑖, 𝑗 son electromecánicamente coherentes debido a que
la diferencia angular entre ellos es casi constante. El generador 𝑘 no es coherente
respecto a los otros dos generadores debido a que la variación en sus ángulos de rotor
es diferente a las otras.

IV EQUIVALENTE DINÁMICO
25
Ilustración 6: Curvas de oscilación de tres generadores
4.3.5. Modal – Coherente
Investigaciones recientes han demostrado que muchas de las características más
importantes de los equivalentes dinámicos obtenidos mediante métodos
convencionales -tanto modal como coherente- pueden combinarse en un simple
equivalente cuando una medición RMS de coherencia y una perturbación aleatoria en
el sistema son usados para determinar grupos coherentes. Un equivalente modal-
coherente puede ser construido preservando no solo los grupos coherentes sino
también los modos de éstos.
En general, el método modifica la forma en la que los grupos coherentes son
encontrados ya que en lugar de aplicar una pequeña perturbación en el sistema éste es
sometido a una serie de perturbaciones probabilísticas modales para realizar
mediciones RMS de coherencia. Aunque no es necesario modificar el algoritmo que se
usa para realizar la agrupación de generadores coherentes, en algunos trabajos se ha
utilizado un nuevo algoritmo, el cual se sirve de dichas mediciones para indicar el
incremento del error cuando se reduce el modelo. Así, se controla el proceso de
obtención del equivalente hasta obtener uno con un grado de exactitud razonable.

V FACTS
26
5. FACTS
5.1. ANTECEDENTES
Los equipamientos que se encuentran bajo el concepto de sistemas de
transmisión AC flexible (FACTS) comenzaron a ser implementados a finales de la década
de los sesenta por diversos grupos y bajo el nombre de FACTS (Flexible Alternating
Current Transmission System) empezaron a existir, a partir de 1988, cuando Hingorani
publicó “High Power Electronics and flexible AC Transmission System” (IEEE) [6]. En esta
época, Hingorani vicepresidente del EPRI (Energy Power Research Institute) dirigía un
grupo de trabajo que investigaba sobre el empleo de la electrónica de potencia en los
sistemas de potencia.
5.2. DEFINICIÓN
Según el IEEE (Institute of Electrical and Electronics Engineers), la definición de
los sistemas FACTS es la siguiente: “Sistemas de transmisión de corriente alterna que
incorporan controladores estáticos y otros basados en electrónica de potencia para
mejorar el control e incrementar la capacidad de transferir potencia” [7].
El término de la industria eléctrica, FACTS, cubre un número de tecnologías que
optimizan la seguridad, la capacidad y la flexibilidad de los sistemas de transmisión de
energía. Las soluciones FACTS permiten incrementar la capacidad de las Redes de
transporte existentes mientras mantienen o mejoran los márgenes de operación
necesarios para la estabilidad de la red. Al utilizar los sistemas de transmisión flexible
(FACTS) es posible hacer llegar más energía a los consumidores con un mínimo impacto
en el ambiente y a menor costo de inversión si lo comparamos con la alternativa de
construir nuevas líneas de transporte o plantas generadoras que llevan más tiempo e
inversión. La tecnología de los FACTS provee soluciones a los problemas de estabilidad
y permite a los sistemas de transmisión operar más eficientemente.
El concepto de FACTS agrupa a un conjunto de nuevos equipos de electrónica de
potencia que permiten mayor flexibilidad al control de los sistemas eléctricos. En este
caso, entiéndase flexibilidad como la capacidad de alteración rápida y continua de los
parámetros que controlan la dinámica de funcionamiento de los sistemas eléctricos.
5.3. TIPOS DE DISPOSITIVOS FACTS
Los dispositivos FACTS se dividen en dos grandes grupos: los compensadores
conectados en paralelo y los compensadores conectados en serie. A través de su
historia, los dispositivos FACTS se han clasificado por generaciones [8].

V FACTS
27
5.3.1. La primera generación
Son dispositivos FACTS que emplean tiristores y elementos semiconductores.
Ejemplos de dispositivos conectados en paralelo con la Red del sistema de
potencia pertenecientes a la primera generación son: el TCR (Thyristor Controlled
Reactor), el TSC (Thyristor Switched Condensador) y el SVC (Static Var Compensator). El
diagrama de estos dispositivo es el que se muestra a continuación.
Ilustración 7: FACTS primera generación paralelo
Ejemplos de dispositivos conectados en serie con la Red y pertenecientes a la
primera generación son: el TSSC (Thyristor Switched Series Condensador) y el TCSC
(Thyristor Controlled Series Condensador) cuyos esquemas se muestran en la ilustración
8.
Ilustración 8: FACTS primera generación serie

V FACTS
28
5.3.2. La segunda generación
Está compuesta por dispositivos que utilizan elementos semiconductores tales
como el transistor bipolar de puerta aislada (IGBT - Insulated Gate Bipolar Transistor) y
transistores GTO (GTO - Gate Turn Off Thyristor), los cuales se describen en [49].
Dispositivos FACTS que utilizan estos elementos de conmutación como ejemplos
de compensadores paralelos son el STATCOM (Static Synchronous Shunt Compensator),
cuyo esquema está mostrado en la ilustración 9, y compensadores conectados en serie
como el SSSC (Static Synchronous Series Compensator) cuyo esquema es el que aparece
en la ilustración 10.
Ilustración 9: FACTS de segunda generación paralelo STATCOM
Ilustración 10: FACTS de segunda generación serie - SSSC
5.3.3. La tercera generación
Está compuesta por la integración de dos dispositivos serie y paralelo en una
misma línea de transmisión. Un resultado de esto es el UPFC (Unified Power Flow
Controller), el cual, es un dispositivo combinado de un SSSC y un STATCOM conforme es
mostrado en la ilustración 11.
Ilustración 11: FACTS tercera generación UPFC

V FACTS
29
5.3.4. La cuarta generación
Está conformada por la integración de dispositivos serie y paralelo pero en
diferentes líneas de transporte que dan lugar al nombre Controlador de flujo de potencia
interlínea (IPFC - Interline Power Flow Controller), tal y como se muestra en la ilustración
12.
Ilustración 12: FACTS cuarta generación IPFC
Ilustración 13: TABLA: Dispositivos FACTS y convencionales [11]

V FACTS
30
5.4. CARACTERÍSTICAS DE LOS FACTS
Los FACTS controlan el flujo de potencia en una línea de transmisión. Esto
permite utilizar las líneas cerca de sus límites térmicos y/o forzar los flujos de potencia
por rutas determinadas. Estos dispositivos también pueden ser utilizados para controlar
problemas dinámicos del sistema y para compartir potencia entre las Redes de regiones
alejadas teniendo como fin utilizar las cargas debido a la diferencia de clima y horario, a
la disponibilidad de diversas reservas de generación en zonas geográficas distintas, a los
cambios en los precios del combustible así como en su regulación, etcétera.
Es por todo que a día de hoy el número de estas instalaciones está en aumento
en el sistema interconectado debido a que entregan nodos de tensión
aproximadamente constante en estado estacionario que aumentan, asimismo, la
estabilidad transitoria del sistema.
Los sistemas de control de los FACTS están basados en la posibilidad de manejar
los parámetros interrelacionados que restringen los sistemas (impedancias serie y
paralelo, ángulo de fase, oscilaciones a frecuencias subsíncronas) permitiendo, además,
operar las líneas de transporte cerca de sus límites térmicos, lo que anteriormente era
imposible sin violar las restricciones de seguridad del sistema. Los FACTS son sistemas
de transmisión de corriente alterna que incorporan controladores estáticos basados en
electrónica de potencia para mejorar la controlabilidad e incrementar la capacidad de
transferencia de potencia.
5.5. CLASIFICACIÓN DE LOS FACTS SEGÚN EL DISPOSITIVO
SEMICONDUCTOR
A continuación, se puede ver una clasificación de los equipamientos FACTS en función del tipo de dispositivo semiconductor que generalmente se utiliza:
Ilustración 14: Clasificación de FACTS según dispositivo semiconductor
SEMICONDUCTOR FACTS
Cambiadores de Tap
Regualción del Ángulo de Fase
Compesador Estatico de Reactiva (SVC)
Compesador Serie Controlado por Tiristores (TCSC)
Compensador Estático Sincrono (STATCOM)
Compesador Estático Síncrono en Serie (SSSC)
Controlador de Fujo de Potencia Unificado (UPFC)
Compensador Estático Sincrono (STATCOM)
Alta Tensión en Corriente Continua (HVDC)
Tiristor
GTO
IGBT

V FACTS
31
5.6. FACTS EN REDES INTERCONECTADAS
Los beneficios de la interconexión en los sistemas eléctricos son indiscutibles. La
interconexión permite a las partes compartir los beneficios de los grandes sistemas
eléctricos como son la optimización de la generación de la energía, la utilización de las
diferencias en los perfiles de carga y la puesta en común de la capacidad de reserva. Ello
supone no solo ventajas técnicas y económicas, sino también ventajas
medioambientales. Por ejemplo, el exceso de recursos hídricos en una región se puede
utilizar en otra región para sustituir a la generación de electricidad en centrales térmicas
y así evitar los perjuicios para el medioambiente.
Sin embargo, para que las interconexiones cumplan su cometido, las líneas de
transporte disponibles deben ser lo suficientemente potentes como para transmitir las
cantidades de energía deseadas. Si no es así, desde un punto de vista estrictamente
técnico, siempre se podrá recurrir a la construcción de líneas adicionales paralelas a las
ya existentes o mejorar los sistemas aumentando su voltaje. No obstante, esta solución
es cara, lleva mucho tiempo y requiere complicados trámites para conseguir los
permisos necesarios. Por otra parte, en muchos casos, las consideraciones
medioambientales, la opinión popular y otros impedimentos hacen imposible, en la
práctica, la construcción de nuevas líneas o la construcción de sistemas de voltaje ultra-
altos. Ahí es donde, precisamente, entran en juego las soluciones FACTS.
5.7. OBJETIVOS DE LOS FACTS
Los objetivos de los FACTS son, por una parte, aumentar la capacidad de
transmitir potencia en los sistemas eléctricos de potencia y, por otro lado, aumentar el
margen de estabilidad controlando el flujo de potencia activa y reactiva.
Los principales beneficios de usar dispositivos FACTS son [9]:
Mejor control sobre el flujo de potencia guiándola a través de determinados
caminos (menos cargados).
Posibilidad de operación con niveles de carga seguros (sin sobrecarga) y cercanos
a los límites térmicos de las líneas de transporte.
Mayor capacidad de transferencia de potencia en áreas controladas con la
consiguiente reducción del margen de reserva en generación.
Aumento de la seguridad del sistema y su consiguiente crecida del límite de
estabilidad transitoria restringiendo las corrientes de cortocircuito y las de
sobrecarga.
Atenuación de las oscilaciones de potencia del sistema, las cuales son dañinas
para los sistemas y para los equipamientos conectados a la Red.

V FACTS
32
Actuación rápida ante cambio en las condiciones de la red proporcionando un
control del flujo de la potencia real y efectiva.
Mayor seguridad en las conexiones entre líneas de distintas compañías y
diferentes áreas.

VI SVC
33
6. SVC
6.1. FUNCIONAMIENTO
El principio de funcionamiento del SVC (Static Var Compensator) es el de aportar
una inyección de potencia reactiva a la red eléctrica mediante el control de reactancias
y/o capacidades.
El SVC reacciona rápidamente proporcionando la energía reactiva requerida para
controlar las variaciones dinámicas de tensión en diferentes condiciones del sistema. Su
funcionamiento se basa principalmente en el control entregado por los componentes
activos; es posible controlar la amplitud del componente fundamental de la corriente
cuya naturaleza es inductiva. Al tener control sobre esta corriente se tiene control sobre
la corriente del SVC, con lo cual se obliga al compensador a absorber una corriente del
tipo inductiva o capacitiva dependiendo de la compensación requerida. El ángulo de
disparo en los tiristores se determina por medio de la medición de la tensión en donde
se encuentra conectado el SVC a la línea de transmisión, es decir, el punto de
compensación de reactivas. Este punto es el máximo de la tensión de cada semiciclo
que, comparado con la tensión de referencia, genera órdenes de disparo para los
tiristores produciendo un control de tensión para cada semiciclo.
6.2. CONFIGURACIÓN BÁSICA
El SVC posee un comportamiento característico basado en su composición de
elementos reactivos como reactancias y bancos de condensadores, los cuales están
controlados por elementos activos como tiristores. Así, el SVC está compuesto por un
TCR y un banco de condensadores en paralelo en donde el TCR está constituido por un
inductor de reactancia fija y un convertidor CA-CA (conformado por tiristores en
antiparalelo). Dependiendo del valor adquirido por el ángulo de disparo de este par de
tiristores, el SVC se puede ver como una reactancia equivalente variable, ya sea
inductiva o capacitiva, que dependerá de la compensación requerida por el sistema en
ese instante.

VI SVC
34
Ilustración 15: Configuración del SVC
6.3. ELEMENTOS
Los elementos más característicos de un SVC son los condensadores conmutados
por tiristores (TSC - Thyristor Switched Condensador) y las bobinas conmutadas por
tiristores (TSR - Thyristor Switched Reactor) o las bobinas controladas por tiristores (TCR
- Thyristor Controlled Reactor) ya que estos dispositivos son los que incluyen la
electrónica de potencia. En la ilustración 16 se muestra un esquema simplificado para
un SVC con los elementos anteriormente citados [11].
Ilustración 16: Esquema simplificado para un SVC
El SVC posee un comportamiento característico fundado en su composición de
elementos reactivos como reactancias y en bancos de condensadores, los cuales están
controlados por elementos activos como tiristores. De este modo, el SVC está
compuesto por un TCR y un banco de condensadores en paralelo en donde el TCR está
constituido por un inductor de reactancia fija y un convertidor AC-AC (conformado por
tiristores en antiparalelo). Dependiendo del valor adquirido por el ángulo de disparo de

VI SVC
35
este par de tiristores, el SVC se puede ver como una reactancia equivalente variable -ya
sea inductiva o capacitiva- que dependerá de la compensación requerida por el sistema
en ese instante.
6.3.1. Condensadores conmutados por tiristores (TSC)
El esquema del condensador conmutado por tiristor (TSC) representa la
configuración más sencilla de la utilización de dispositivos electrónicos de potencia en
el control de reactiva. Este elemento está formado por un interruptor de estado sólido
en serie con un condensador o batería de condensadores (ver ilustración 17).
Ilustración 17: Esquema de TSC
6.3.2. Bobinas controladas por tiristores (TCR)
Otro elemento característico en los SVC es la bobina controlada por tiristores o
(TCR). La principal misión de este elemento es la de conseguir una regulación continua
y rápida de la potencia reactiva consumida por una bobina. El esquema de un TCR (ver
ilustración 18) está formado por una bobina (R+L) y un convertidor CA/CA compuesto
por dos tiristores en antiparalelo. En este caso, a la electrónica de potencia se le aplica
un control de fase de forma que se regula el valor eficaz de la corriente que circula a
través de la reactancia.
Ilustración 18: Esquema de TCR

VI SVC
36
6.3.3. Bobinas conmutadas por tiristores (TSR)
Un TSR tiene el equipo muy similar a un TCR. La principal diferencia radica en que
es usado solo en ángulos fijos para la conducción completa o nula. Por tanto, la corriente
reactiva será proporcional al voltaje aplicado ya que la reactancia es variada en una
forma gradual.
6.4. APLICACIONES DEL SVC
Los SVC se instalan para desempeñar las siguientes funciones:
Estabilización de la tensión dinámica: aumento de la capacidad de transferencia
de energía y reducción de la variación de tensión.
Mejora de la estabilidad sincrónica: aumento de la estabilidad en régimen
transitorio y mejor amortiguación del sistema de transmisión de energía
eléctrica.
Reducir las oscilaciones de potencia activa por medio de la modulación de la
amplitud de la tensión.

VII STATCOM
37
7. STATCOM
7.1. FUNCIONAMIENTO
El principio de funcionamiento de un STATCOM (compensador estático síncrono)
se basa en un inversor de voltaje que genera un voltaje de AC controlable desde atrás
de la reactancia de dispersión del transformador logrando, de este modo, que la
diferencia de tensión a través de la reactancia produzca intercambio de potencia activa
y reactiva con la Red de transmisión [11].
Ilustración 19: Esquema del STATCOM
Si la amplitud Ec del fasor de tensión de salida se aumenta por encima de la amplitud U del fasor de tensión del sistema, entonces el fasor de corriente adelanta al fasor de tensión y la corriente fluye desde el convertidor hacia el sistema de alterna, y el convertidor entrega potencia reactiva (capacitiva) al sistema.[46]
Ilustración 20: Diagrama fasorial de operación capacitiva del STATCOM
Si la amplitud Ec del fasor de tensión de salida se disminuye por debajo de la amplitud U del fasor de tensión del sistema, entonces la corriente reactiva fluye desde el sistema de alterna hacia el convertidor, y el convertidor absorbe potencia reactiva (inductiva) al sistema.[46]
Ilustración 21: Diagrama fasorial de operación inductiva del STATCOM

VII STATCOM
38
7.2. COMPONENTES DE UN STATCOM
El STATCOM es una fuente de tensión controlada en amplitud y fase e
implementada a través de inversores. Estos inversores poseen en su lado de corriente
continua condensadores para simular una fuente de tensión DC. El condensador en el
lado de corriente continua sirve también como sistema almacenador de energía. Los
transformadores son utilizados para compatibilizar los niveles de impedancia del
compensador así como del sistema de potencia AC. En la mayoría de los casos, los
transformadores son utilizados para minimizar el contenido de armónicos de tensión del
inversor.
Asimismo, el STATCOM está compuesto por cuatro partes básicas: inversores,
transformadores, condensadores en el lado de corriente continua y un sistema de
control. Aunque existen variaciones de las topologías utilizadas, para el esquema
discutido anteriormente, el STATCOM continúa con el mismo funcionamiento, sin
alteraciones.
Las partes integrantes del STATCOM se discuten a continuación identificando sus
funciones y variaciones dentro de las topologías investigadas.
7.2.1. Inversores
Los inversores son un conjunto de tiristores con capacidad de corte y conducción
controlados y su función en el STATCOM supone la generación de la tensión alterna a
partir de la tensión de corriente continua en el lado de corriente continua del
condensador.
7.2.1.1. Dispositivos semiconductores controlables
Los dispositivos semiconductores empleados en este tipo de convertidores
electrónicos de potencia -o inversores- tienen un control total puesto que basan su
construcción en dispositivos controlables tales como el transistor bipolar con compuerta
aislada (IGBT) y el Tiristor con compuerta de apagado (GTO). A continuación se muestra
el símbolo para el GTO y para IGBT respectivamente.
Ilustración 22: Símbolo general GTO (a) e IGBT (b)

VII STATCOM
39
En la actualidad, con mayores capacidades de tensión de bloqueo (6,5 kV) y
corriente de corte (6 kA), están siendo fabricados los HiGT (High-Conductivity IGBT) e
IEGT (Injection enhanced IGBT). A pesar de que la capacidad de bloqueo y corte de los
IGBT son un poco menores que los IEGT y HiGT pueden soportar frecuencias de
conmutación más altas y es por ello por lo que se han convertido en los más utilizados.
7.2.1.2. Topologías:
7.2.1.2.1. Inversor trifásico de seis pulsos
Tiene la ventaja de utilizar menos válvulas que los otros ejemplos que se
muestran a continuación. Idealmente, se utilizan dos válvulas por cada fase hasta un
total de seis. Los armónicos presentes en la tensión fase-fase del inversor de seis pulsos
están en el orden de 6n ± 1 donde n= 0,1,2..., eliminando los armónicos múltiplos de
tres existentes en la tensión fase neutro.
Ilustración 23: Inversor trifásico de 6 pulsos
7.2.1.2.2. Inversor trifásico con tres inversores puente H monofásicos
Los inversores monofásicos se pueden conectar formando una estructura
trifásica. Comparándolo con el inversor de seis pulsos, la estructura compuesta por
inversores monofásicos utiliza mucho más válvulas (12 válvulas), es decir, el doble de lo
que necesita el inversor de seis pulsos, el cual supone una limitante importante cuando
se desean implementar inversores de más pulsos como ocurre con la implementación
del STATCOM.

VII STATCOM
40
Ilustración 24: Inversor trifásico con tres inversores puente H
7.2.1.2.3. Inversor trifásico de tres niveles NPC
Los inversores trifásicos de tres niveles han sido estudiados y recomendados
como los más recientes en el desarrollo del STATCOM. La topología del neutral point
clamped solo utiliza 12 válvulas, siendo cuatro por cada fase además de seis diodos. El
resultado obtenido de la tensión fase-fase es parecido al obtenido por la topología
trifásica compuesta por inversores monofásicos.
Ilustración 25: Inversor de tres niveles NPC

VII STATCOM
41
7.2.1.3. Frecuencia de conmutación
Los accionamientos dados en bajas frecuencias son aquellos que utilizan
frecuencias próximas a la frecuencia de la red y se caracterizan por las formas de onda
cuadradas y por las técnicas PAM (Pulse Amplitud Modulation [Rashid, 2004]). Cuando
se utiliza bajo número de pulsos, el contenido armónico en órdenes bajos puede ser
alto. Una ventaja de esta técnica está ligada a menores pérdidas de energía en los
elementos de conmutación.
Los accionamientos a altas frecuencias, caracterizadas por las técnicas PWM,
utilizan frecuencias de conmutación mucho mayores que la de la red del orden de
algunos kHz. Los armónicos producidos por estas técnicas tienen órdenes más altas que
pueden ser filtradas más fácilmente. También, se ha verificado que estas técnicas
permiten respuestas dinámicas más rápidas. No obstante, con el aumento de los
equipamientos, las pérdidas de los dispositivos de conmutación aumentan
inviabilizando, en muchos casos, este tipo de modulación.
7.2.2. Condensador del Lado DC
La principal función del lado de corriente continua del STATCOM es servir de
fuente de tensión DC posibilitando la actuación del inversor. Además, un condensador
del lado de corriente continua sirve como acumulador temporal de energía permitiendo
su intercambio entre el sistema eléctrico y el STATCOM.
7.2.2.1. Topologías
El arreglo de condensadores más empleado en el STATCOM se muestra en la
ilustración 24 donde solo un condensador se conecta al lado de corriente continua de
los inversores. Existen otros ejemplos como el mostrado en la ilustración 25 donde para
cada conversor hay un condensador independiente. En dicha ilustración se aprecia una
sola fase perteneciente a una configuración trifásica.

VII STATCOM
42
Ilustración 26: Topología de un condensador del lado DC
Ilustración 27: Topología con condensador individual para cada inversor
7.2.3. Transformador
En el STATCOM son utilizados dos grupos de transformadores para sus dos
funciones principales: el transformador de acoplamiento -cuya función es la conexión
del STATCOM con el sistema eléctrico de potencia a fin de atender las limitaciones de
tensión de los dispositivos de conmutación de los inversores- y los transformadores de
estructura magnética de reducción de armónicos los cuales, a través de formas
especiales de conexión, eliminan algunos de los armónicos generados por los inversores
reduciendo su contenido de inyección a la Red. Existe la posibilidad de hacer
transformadores que posean ambas funciones aunque este tipo de arreglo no es común.
Por su parte, el transformador de acoplamiento posee relaciones simples de
conexión entre primario y secundario con conexiones de tipo estrella-estrella o estrella-
delta. Cuando los transformadores se utilizan para reducir el contenido de armónicos
existen dos tipos de arreglos básicos: las topologías zig-zag y estrella-delta.

VII STATCOM
43
7.2.3.1. Transformadores zig-zag
El arreglo de transformadores llamados zig-zag está compuesto por
transformadores especiales montados de tal forma que puedan generar desfasajes en
las tensiones. En la ilustración 26 se muestra un ejemplo de utilización de estos
transformadores en un STATCOM de 24 pulsos.
Ilustración 28: STATCOM de 24 pulsos utilizando transformadores zig-zag
7.2.3.2. Transformadores estrella-triángulo
Unas de la ventajas existentes en la utilización de este tipo de transformadores
es que serán iguales de dos en dos para el STATCOM de 24 pulsos y de cuatro en cuatro
para el STATCOM de 48 pulsos (mientras que para el esquema zig-zag se necesitan
respectivamente 4 y 8 transformadores diferentes) además de que no existen complejas
relaciones de los arrollamientos de sus devanados.

VII STATCOM
44
Ilustración 29: Diagrama de STATCOM cuasi-24 pulsos (conexión estrella -triángulo)
7.3. APLICACIONES
Estabilización de tensión en sistemas débiles.
Reduce pérdidas de transmisión.
Mejora la capacidad de transmisión y permite que la Red existente rinda con la
más alta eficiencia.

VIII UPFC
45
8. UPFC
8.1. ANTECEDENTES
Los equipos basados en fuentes de voltaje como el STATCOM y el SSSC tienen la
capacidad inherente de intercambiar potencia activa y reactiva con el sistema. Estos
equipos generan o absorben automáticamente la potencia reactiva requerida y, por
tanto, pueden realizar compensación de reactivos sin necesidad de condensadores o
reactancias en corriente alterna.
Como respuesta a la necesidad de controlar simultánea e independientemente
los flujos de potencia activa y reactiva surge la idea de utilizar un dispositivo que
combine las distintas capacidades de compensación que será el Controlador unificado
de flujo de potencia (Unified Power Flow Controller, UPFC).
8.2. CONFIGURACIÓN
El UPFC se compone de dos puentes convertidores controlados, uno conectado
a través de un transformador en serie con la línea de transmisión mediante un SSSC
(Static Synchronous Series Compensator) y el otro conectado al sistema en paralelo
mediante un STATCOM (Static Sinchronous Compensator). Ambos convertidores se
interconectan en el lado DC, en general, a través de un banco de condensadores.
Dependiendo de la tecnología y de la potencia, los puentes pueden ser de IGBT o GTO .
La configuración clásica se muestra a continuación [13].
Ilustración 30: Configuración del UPFC

VIII UPFC
46
Ilustración 31: Diagrama fasorial de operación del UPFC a) Regulación de voltaje, b) Compensación de impedancia de la línea, c) Cambiador de fase, d) Control simultáneo de tensión, impedancia y ángulo
a) Regulación de voltage. Se logra con inyección en fase y en contra‐fase de un
voltaje variable continuamente. En la figura 31.a se observa como el voltaje
resultante siempre está en fase con el voltaje original ya que el ángulo del
voltaje inyectado VB=ΔV es siempre cero en este caso. Funcionalmente, esto
es similar al efecto obtenido con un cambia tomas que tuviese pasos
infinitamente pequeños [47].
b) Compensación de la impedancia de la línea. Se logra haciendo compensación
reactiva serie mediante la adición del voltaje VB=Vq en cuadratura con la
corriente de la línea como se indica en la figura 31.b. Funcionalmente, esto
es similar a la compensación serie capacitiva e inductiva lograda mediante el
dispositivo SSSC [47].
c) Regulación de ángulo de fase. Se logra mediante la inyección del voltaje
VB=Vθ con una relación angular con respecto a VS que logra el desfase
deseado θ (en adelanto o en atraso), sin ningún cambio en magnitud como
se indica en el diagrama fasorial de la figura 31.c. Así, el UPFC funcionaría
como un regulador de ángulo de fase perfecto [47].
d) Control de flujo de potencia multifuncional. El UPFC permite un manejo
simultáneo sobre la regulación del voltaje terminal, la compensación serie
capacitiva en la línea, y el cambio del ángulo de fase. En este caso se
combinan las tres capacidades de control anteriores y el voltaje inyectado
será VB= ΔV+ Vq+ Vθ. En la figura 31.d. se indica el diagrama fasorial donde
se muestra la combinación de los tres efectos [47].

VIII UPFC
47
8.3. FUNCIONAMIENTO
El funcionamiento es posible al tener dos conversores AC/DC bidireccionales
basados en fuente de voltaje -ambos conectados entre sí mediante un condensador en
corriente continua- conectados al sistema a través de sendos transformadores de
acoplamiento, uno en paralelo con la línea de transmisión y el otro en serie con ella. El
condensador en el acoplamiento provee soporte de voltaje DC para la operación de los
conversores y funciona como elemento de almacenamiento de energía. La potencia
activa fluye entre los terminales AC serie y paralelo del UPFC a través del enlace común
en DC. La potencia reactiva es generada o absorbida localmente por los conversores del
UPFC. Cada conversor genera o absorbe reactivos independientemente, es decir, la
potencia reactiva no fluye a través del condensador DC.
La principal función del UPFC es realizada por el conversor serie inyectando un
voltaje en la frecuencia fundamental -de magnitud y ángulo controlables- a través del
transformador de acoplamiento en serie con la línea de transmisión. La potencia activa
intercambiada con la línea es suministrada por el mismo sistema a través del conversor
shunt y el link DC.
El lado AC del conversor paralelo está conectado en derivación con la línea de
transmisión a través de un transformador donde una corriente de magnitud y un ángulo
controlables son inyectados o absorbidos desde el sistema. La función básica de este
conversor es suministrar o absorber la potencia activa demandada por el lado DC del
conversor serie. Puede también generar o absorber reactivos proporcionando, así,
compensación en paralelo, independientemente del conversor serie que otorga un
control local de voltaje.
8.4. APLICACIONES
Control de flujo.
Mejora de la estabilidad transitoria.
Mejora del amortiguamiento de las oscilaciones de potencia.
Control de la potencia que se obtiene de un sistema de HVDC sin necesidad de
operación asíncrona.
Prevención de un colapso de tensión mediante el control rápido de tensión.
Modulación de la impedancia de la línea.
Control independiente de flujos de potencia activa y reactiva.

VIII UPFC
48
8.5. SSSC
8.5.1. Concepto
El SSSC (Static Synchronous Series Compensator - Compensador estático
síncrono en serie) es un tipo de FACTS conformado por un inversor de estado sólido que
inyecta un voltaje controlable en cuadratura con la corriente de línea emulando un
efecto de reactancia inductiva o capacitiva con el fin de influenciar el flujo de potencia
en la línea de transmisión permitiendo, de esta manera, ampliar los límites de
estabilidad del sistema y a la vez mejorar algunos de los parámetros de operación [11].
Ilustración 32: Esquema del SSSC
Ilustración 33: Diagrama fasorial de operación del SSSC a) Modo capacitiva, b) Modo inductivo
Generalmente la reactancia de la línea es constante pero este puede ser
controlado a través de una inyección de voltaje, por ejemplo en la ilustración anterior.
a) Cuando Vq es capacitiva la reactancia efectiva de la línea disminuye, entonces el
flujo potencia activa y reactiva aumentan.
b) Cuando Vq es inductiva la reactancia efectiva de la línea aumenta, entonces el flujo
de potencia activa y reactiva disminuyen.

VIII UPFC
49
8.5.2. Principio de operación
El SSSC puede generar o absorber potencia reactiva del sistema y cuenta con un
dispositivo de almacenamiento de energía. Cuando el SSSC solo intercambia potencia
reactiva el desfase entre el voltaje inyectado y la corriente de la línea es -90o. Su efecto
es capacitivo y se produce un incremento en la caída de voltaje y en la línea de
transmisión, lo cual resulta un incremento de corriente y del flujo de potencia. No
obstante, si el voltaje inyectado se encuentra desfasado +90° con respecto a la corriente
de línea se reduce la caída de voltaje en la línea de transmisión y el efecto es inductivo.
La compensación realizada por este dispositivo FACTS puede modelarse mediante una
fuente de voltaje independiente de la corriente y conectada en serie con la línea de
transmisión.
8.5.3. Aplicaciones
Control dinámico del flujo de energía.
Mejora la estabilidad de la tensión y del ángulo [25].
Reduce la impedancia de la línea.

IX FACTS PARA LA MEJORA DE LA ESTABILIDAD TRANSITORIA
50
9. FACTS PARA LA MEJORA DE LA ESTABILIDAD TRANSITORIA
Se sabe que un sistema de potencia es una Red compleja compuesta por
numerosos generadores, líneas de transporte, cargas y transformadores, pero se puede
dar el caso en el que un incremento en la demanda de potencia produzcan que algunas
líneas de transporte están más cargadas de lo que estaban cuando fueron construidas.
Con el aumento de carga en las líneas de gran longitud, el problema de estabilidad
transitoria -después de una gran falta- puede llegar a ser un factor limitante para la
transmisión [33].
La estabilidad transitoria se basa en la capacidad de un sistema para mantener
sincronismo después de ser sometido a una gran perturbación, por ejemplo, un
cortocircuito trifásico [34]. La respuesta del sistema resultante implica grandes
oscilaciones del ángulo del generador del rotor y está influenciada por su carácter no
lineal. La estabilidad depende, sobre todo, de las condiciones iniciales de operación y de
la magnitud de la perturbación.
El desarrollo de la electrónica de potencia introduce el uso de los sistemas
flexibles de transmisión AC (FACTS) en sistemas de potencia. Los FACTS son capaces de
controlar el estado de la red de manera rápida y esa característica puede ser
aprovechada para mejorar la estabilidad transitoria de complejos sistemas de potencia
[35]. Introduciendo fuentes de potencia reactiva y/o activa en ubicaciones apropiadas
se obtendrían las soluciones más efectivas para mejorar la estabilidad del sistema.
El desarrollo reciente y el uso de FACTS en sistemas de transmisión de potencia
dan lugar a un número elevado de aplicaciones no solo mejorando la estabilidad
transitoria en el existente Sistema de Potencia sino también dándole flexibilidad.
Son cinco los dispositivos FACTS utilizados por las grandes compañías para este
propósito:
Static Var Compensator (SVC)
Static Synchronous Compensator (STATCOM)
Thyristor-Controlled Series Condensador (TCSC)
Static Synchronous Series Compensator (SSSC)
Unified Power Flow Controller (UPFC)
Cada una de ellas presenta sus propias características y limitaciones:
El Compensador estático de potencia reactiva (SVC) pertenece a la primera
generación de los dispositivos FACTS que puede controlar la tensión en el bus
requerido. De este modo, mejora el perfil de tensión del sistema. La principal
tarea de un SVC es mantener la tensión en un bus concreto mediante la

IX FACTS PARA LA MEJORA DE LA ESTABILIDAD TRANSITORIA
51
compensación de potencia reactiva. Los SVC han sido usados por su alto
desempeño en el estado estacionario y en el control de la tensión transitoria
siendo comparados con la compensación clásica en paralelo. Los SVC también
son empleados para amortiguar oscilaciones de potencia, para mejorar la
estabilidad transitoria y para reducir pérdidas del sistema mediante el control
optimizado de potencia reactiva [36]-[37].
El Compensador estático síncrono (STATCOM) pertenece a la segunda
generación de los dispositivos FACTS y es usado para las mismas tareas que el
SVC mencionadas en el párrafo anterior. Las principales diferencias con el SVC
son que la intensidad de salida es independiente a la tensión del sistema y que
el tiempo de respuesta es inferior a un ciclo.
El Condensador serie controlado por tiristores (TCSC) es un miembro de los
dispositivos FACTS que cada vez se aplica con mayor ímpetu a líneas de
transporte de gran longitud en los sistemas de potencia modernos. Éste puede
tener varios roles en la operación y en el control del sistema de potencia como
programar el flujo de potencia, disminuir los componentes asimétricos, reducir
pérdidas en la Red, dar soporte de tensión, limitar la corriente de cortocircuito,
mitigar la resonancia subsincrona (SSR), amortiguar la oscilación de potencia y
mejorar la estabilidad transitoria [38]-[39].
El Compensador estático síncrono serie (SSSC) pertenece a la segunda
generación de los dispositivos FACTS y son usados para balancear la carga en
Redes de distribución interconectadas así como para corregir el factor de
potencia y el control del flujo de potencia [42].
El Controlador unificado de flujo de potencia (UPFC) es el más versátil ya que
puede ser usado para mejorar la estabilidad (dinámica y transitoria) en estado
estacionario [40]. El UPFC puede controlar, independientemente, más
parámetros puesto que es la combinación del compensador estático síncrono
(STATCOM) y el compensador estático síncrono en serie (SSSC). Este dispositivo
ofrece una alternativa que permite mitigar las oscilaciones de potencia del
sistema. En muchas publicaciones se reporta que el UPFC es capaz de mejorar la
estabilidad de un sistema multimáquina [41].
9.1. VENTAJAS DEL SVC, STATCOM y UPFC
La evolución del SVC es el STATCOM que se basa en el principio de que un
inversor de voltaje genera un voltaje de AC controlable atrás de la reactancia de
dispersión del transformador. De este modo, la diferencia de voltaje a través de la

IX FACTS PARA LA MEJORA DE LA ESTABILIDAD TRANSITORIA
52
reactancia produce intercambio de potencia activa y reactiva entre el STATCOM y la Red
de transmisión [14].
Uno de los dispositivos FACTS con mayor flexibilidad es el UPFC que le permiten
controlar en tiempo real los principales parámetros de un sistema de potencia (tensión,
ángulo de fase e impedancia) [15]-[26].
9.1.1. Ventajas del STATCOM frente al SVC
Reducción en el tamaño de los equipos.
Intensidad independiente de la tensión.
No requiere filtro de armónicos.
Tiempos de respuesta inferiores a un ciclo.
Mejor funcionamiento.
Reducción de costos para potencias futuras.
Reducción de campos magnéticos y de ruido.
a) b)
c)
Ilustración 34: a) Curva tensión intensidad para el SVC, b) Curva tensión intensidad para el STATCOM c) STATCOM ocupa menos espacio que el SVC [16]

IX FACTS PARA LA MEJORA DE LA ESTABILIDAD TRANSITORIA
53
9.1.2. Ventajas del UPFC frente al STATCOM
Controla el flujo de potencia en la línea.
Estabiliza la tensión y el ángulo de fase en la línea.
Control independiente de potencia activa y reactiva.
Ilustración 35: Ventajas del UPFC vs STATCOM
9.1.3. Esquema de la comparativa
FACTS\Aplicaciones Control de flujo de potencia
Estabilidad angular
Estabilidad dinámica
Control de reactiva
Estabilidad de tensión
SVC
STATCOM
UPFC
Ilustración 36: Aplicaciones del SVC, STATCOM y UPFC
Se tiene en cuenta que en muchas publicaciones no se menciona la mejora de la
estabilidad angular (estabilidad transitoria) como una aplicación y/o característica de los
FACTS ya que si nos centramos individualmente solo en la definición de cada uno el único
que llega a modificar o a mantener el ángulo es el UPFC siendo, generalmente, aplicado
en buses en medio de líneas y no para el ángulo de los rotores. Sin embargo, se recuerda
que la estabilidad transitoria está relacionada con los ángulos de las máquinas síncronas
del sistema. Por tanto, haciendo un estudio del sistema, se incluyen máquinas síncronas,
bus, transformadores, FACTS, etcétera, pudiendo estudiar en él las ventajas de incluir
FACTS con el fin de mejorar la estabilidad transitoria.

IX FACTS PARA LA MEJORA DE LA ESTABILIDAD TRANSITORIA
54
9.2. COMPARACIÓN DE COSTOS
Una comparación de costos de distintos dispositivos FACTS es la que se muestra
en la ilustración 33. Estos costos han sido estimados de varios reportes de la EPRI
(Instituto de Investigación de Energía Eléctrica) y de un vendedor relacionado con la
instalación de este tipo de tecnologías [44]. Por tanto, el costo del UPFC (controlador
unificado de flujo de potencia) es equivalente a dos STATCOMs, uno en serie y otro en
paralelo. El costo de los dispositivos condensadores convencionales en serie y en
paralelo y los PAR (transformadores reguladores de ángulo) también han sido incluidos,
aunque los HVDC no son parte de este trabajo.
El coste total del proyecto de FACTS depende principalmente de dos
componentes: los costes directos e indirectos. Los primeros abarcan los destinados a
materiales de construcción y a mano de obra relacionada con la instalación. Los costos
indirectos, por su parte, comprenden los relacionados con la concesión de licencias y
permisos, gastos legales, finanzas, administración de proyectos, seguros, impuestos,
intereses, etcétera, de forma sucesiva.
Como ejemplo, el costo está representado por el SVC (compensador estático de
potencia reactiva) en Chester, el cual comprende -125/+425 Mvar [43]. Este SVC está
instalado en una línea de transmisión AC de 345 kV para fortalecer el sistema unido a
otro proyecto: Nueva Inglaterra fase II HVDC. Para este proyecto, el costo del SVC
constituyó para el vendedor el 86% en costes directos y el 14% en costes indirectos [43].
La selección final de un dispositivo FACTS específico está basada en análisis económicos
y técnicos [44].
Ilustración 37: Costo para dispositivos FACTS [44]
Dispositivo Costo (€/kvar)
Capacitor Paralelo 9
Capacitor Serie Convencional 20
Convencional PAR 20
SVC 40
TCSC 40
STATCOM 50
UPFC 100
HVDC back_to_back 108

X AVR y PSS
55
10. AVR y PSS
10.1. INTRODUCCIÓN
Al momento de realizar los estudios de interconexión es preciso tener en cuenta
las oscilaciones electromecánicas, entendidas como inherentes a los sistemas de
potencia debido a la interacción de los generadores dentro de los mismos. Éstos tienden
a aumentar cuando se interconectan a grandes sistemas de potencia, los cuales tratan
de intercambiar enormes bloques de potencia a través de enlaces que pueden ser
débiles ocasionando la aparición de modos oscilatorios de baja frecuencia generando
inestabilidad en el sistema de potencia.
Para que el sistema funcione adecuadamente, todos los generadores deben de
estar interconectados entre sí de forma que se asegure el suministro eléctrico. La
conexión solo es posible cuando todos los generadores se mantienen girando a la misma
velocidad, es decir, en sincronismo; garantizando así el valor constante de la frecuencia
de la tensión de salida. Para controlar estos sistemas se disponen de reguladores
automáticos que mantienen constantes los valores de tensión y frecuencia generadas
por el alternador.
En la realización de estas interconexiones se han observado inestabilidades en el
comportamiento dinámico del sistema, apareciendo oscilaciones mantenidas de muy
baja frecuencia en un rango que va desde 0,2 a 3 Hz. Estas oscilaciones limitan la
capacidad de transmisión de potencia entre los generadores y las cargas y, por dicha
causa, se han diseñado los Estabilizadores de Sistemas de Potencia (Power System
Stabilizer-PSS) como elementos adicionales que permiten amortiguar las oscilaciones y
estabilizar los sistemas eléctricos de potencia.
Los problemas de estabilidad dentro de un sistema de potencia se ven reflejados
en el rotor de la máquina sincrónica, por tanto, en el presente trabajo también se resalta
la importancia de la máquina y sus controles dentro de un estudio de estabilidad. Las
oscilaciones electromecánicas generadas por pequeñas perturbaciones pueden
amortiguarse mediante un buen ajuste de los sistemas de control de la máquina, tales
como el AVR (Automatic Voltage Regulator- Regulador Automático de Tensión) y el PSS
el cual actúa a través del AVR.
El AVR es un dispositivo electrónico que actúa sobre la tensión aplicada al campo
del generador y su objetivo consiste en mantener la tensión en bornes del mismo en un
nivel determinado contribuyendo a la estabilidad transitoria. Por su parte, el PSS es un
equipo desarrollado para minimizar las oscilaciones electromecánicas en los sistemas de
potencia que se encuentra dentro del lazo de control del sistema de excitación de la

X AVR y PSS
56
máquina y provee un amortiguamiento a la oscilación electromecánica presentada en el
sistema de potencia actuando sobre el AVR con una señal de tensión.
10.2. AVR
El regulador de tensión constituye el elemento que controla la salida de la
excitatriz de manera tal que se tengan los cambios de potencia reactiva y tensión
generada en la magnitud que la carga demande.
El regulador automático de la tensión tiene por finalidad mantener la tensión de
salida del generador dentro de unos pequeños límites de variación respecto de un valor
de referencia (o nominal prefijado) aunque la carga conectada al generador varíe según
las necesidades de consumo en cada momento. Dicho de otra manera, el control de
tensión del generador permite mantener constante una consigna de tensión en los
distintos nudos del sistema eléctrico.
El desempeño de un regulador de tensión eficaz va de la mano con su velocidad
de respuesta después de una variación de la carga, evitando así un cambio drástico
en la tensión de salida. Además debe poder llevar con exactitud la tensión nuevamente
a su valor nominal y ser sensible a los pequeños cambios de la carga.
Los reguladores automáticos de tensión aportan a la estabilidad transitoria del sistema,
mediante el control efectivo de voltaje o potencia reactiva, pero así mismo, de estar mal
regulados pueden causar problemas de estabilidad de pequeña señal. [48]
Existen diversos tipos de reguladores en el mercado, los cuales se clasifican
de acuerdo al principio o tecnología de regulación que utilizan. Los más importantes son:
Los reguladores electromecánicos: Su principio de funcionamiento consiste en
un auto transformador de columna, sobre la cual se dispone un cursor accionado
por un servomotor, que en su recorrido suma o resta espiras. Este
movimiento de auto ajuste es controlado por un comando electrónico, que
se activa cada vez que la tensión de salida se desvía de su valor de referencia,
ajustándose automáticamente y con ello mantiene permanentemente la
tensión de salida estable, la respuesta es lenta a las variaciones rápidas de
tensión.
Los reguladores electrónicos: Basan su regulación en un control electrónico,
pueden llevar microprocesador para regular o simplemente un circuito de
control que detecta las variaciones del voltaje y hace la corrección a través
de relés para regular la tensión. Su tiempo de respuesta y velocidad de
regulación son rápidos además de ser económicos en comparación a los
otros tipos.

X AVR y PSS
57
Ilustración 38: Esquema del AVR
10.2.1. Principio de funcionamiento
El control automático de la tensión (AVR) tiene por objetivo mantener la tensión
en bornes del generador mediante el control de la fuerza electromotriz interna del
generador. Para ello, se actúa sobre la corriente de excitación del generador. La
respuesta de estos elementos de control es bastante rápida. El regulador automático de
tensión (AVR) mide la magnitud de la tensión en bornes del generador, valor que es
rectificado y filtrado hasta obtener una señal de corriente continua proporcional al valor
eficaz original. Esta señal de tensión continua se compara con un valor de referencia
siendo la diferencia entre ambas el error de tensión que, después de su amplificación,
se utiliza como tensión de alimentación de la excitatriz principal del generador y que
finalmente se convierte en la tensión de excitación del generador.
10.2.2. Elementos del AVR
• Excitatriz: provee corriente continua al devanado de campo de la máquina
sincrónica constituyendo la etapa de potencia del sistema de excitación.
• Regulador: procesa y amplifica las señales de control a un nivel y a una forma
apropiada. Incluye la regulación y las funciones de estabilización del sistema de
excitación: retroalimentación y compensación de adelanto-retraso.
• Transductor de tensión en bornes y compensador de carga: monitorea, rectifica
y filtra la tensión en bornes para comparar el valor con la referencia de tensión.
• Estabilizador de sistemas de potencia (PSS): provee una señal adicional de
entrada al regulador para amortiguar las oscilaciones del sistema de potencia.
Algunas señales comúnmente utilizadas son: la desviación de la velocidad del
rotor, la potencia de eléctrica y la desviación de frecuencia.

X AVR y PSS
58
Ilustración 39: Elementos del AVR
10.3. PSS
El objetivo de la aplicación de los PSS (estabilizadores de los sistemas de
potencia) es mejorar el amortiguamiento de oscilaciones electromecánicas para
determinadas frecuencias en uno o más puntos de operación del sistema.
10.3.1. Surgimiento del PSS
Aunque los AVR mejoran la estabilidad transitoria del sistema eléctrico a través
de un aumento del par sincronizante los efectos de estos dispositivos sobre el par de
amortiguamiento no son tan significativos. En régimen permanente, el par de entrada
mecánico y el par de salida electromagnético se encuentran equilibrados, y la velocidad
permanece constante. En esta situación, una perturbación del equilibrio puede provocar
una variación de velocidad en los rotores de las máquinas. La estabilidad de ángulo
depende de la existencia de un par sincronizante (en fase con la variación del ángulo del
rotor y cuyo defecto provoca una inestabilidad no oscilatoria) y un par amortiguador (en
fase con la variación de velocidad, causando su falta una inestabilidad oscilatoria). Bajo
ciertas condiciones de operación, el AVR agrava la situación aumentando aún más el
amortiguamiento negativo en el sistema.
Para mejorar el amortiguamiento de las oscilaciones de baja frecuencia se
introducen en el sistema de potencia los PSS.
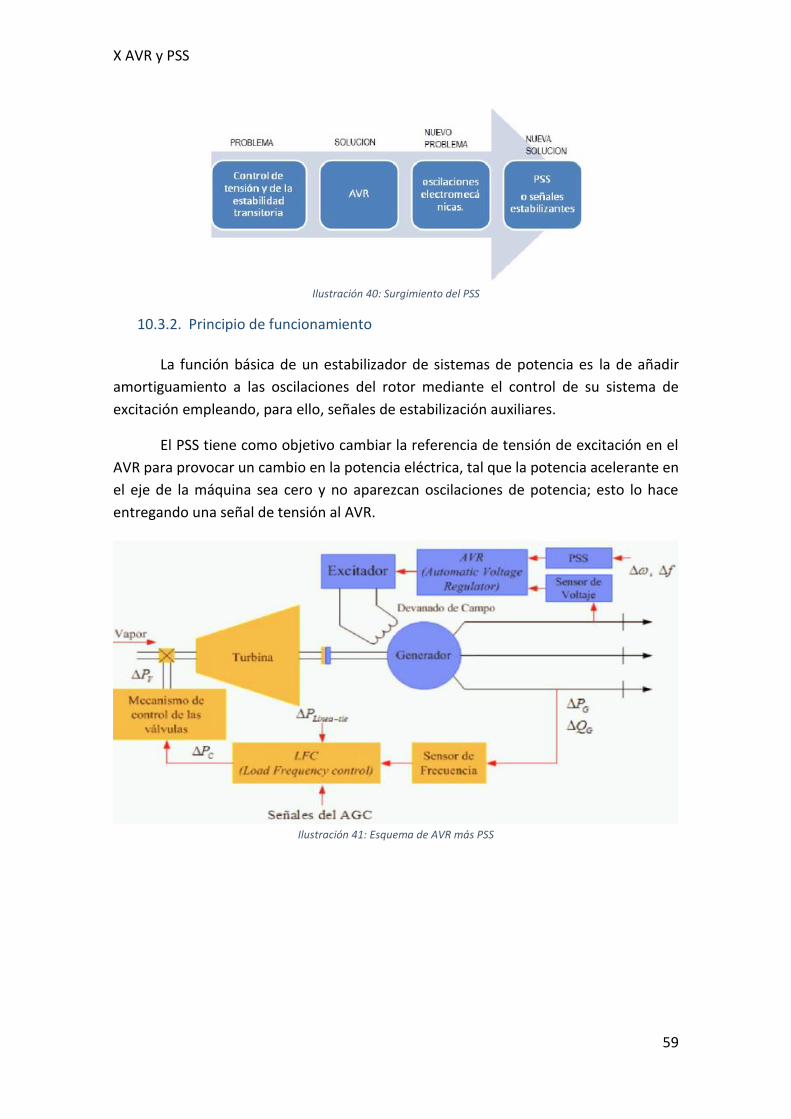
X AVR y PSS
59
Ilustración 40: Surgimiento del PSS
10.3.2. Principio de funcionamiento
La función básica de un estabilizador de sistemas de potencia es la de añadir
amortiguamiento a las oscilaciones del rotor mediante el control de su sistema de
excitación empleando, para ello, señales de estabilización auxiliares.
El PSS tiene como objetivo cambiar la referencia de tensión de excitación en el
AVR para provocar un cambio en la potencia eléctrica, tal que la potencia acelerante en
el eje de la máquina sea cero y no aparezcan oscilaciones de potencia; esto lo hace
entregando una señal de tensión al AVR.
Ilustración 41: Esquema de AVR más PSS
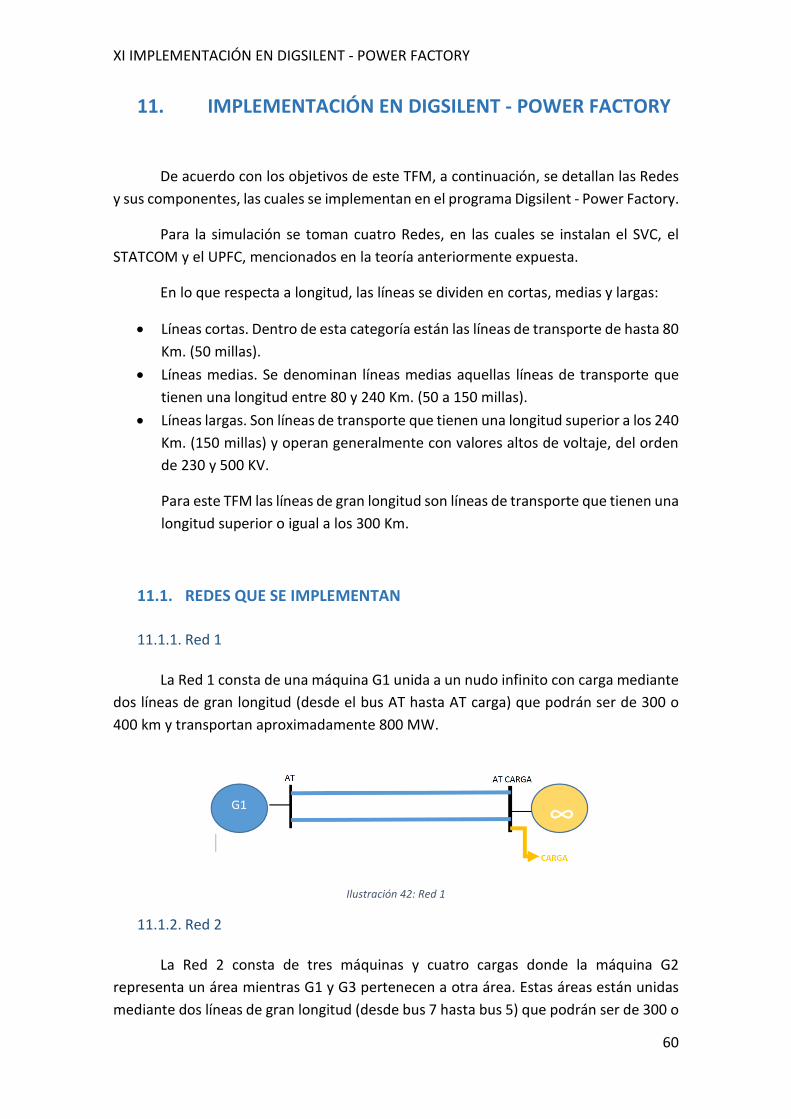
XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
60
11. IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
De acuerdo con los objetivos de este TFM, a continuación, se detallan las Redes
y sus componentes, las cuales se implementan en el programa Digsilent - Power Factory.
Para la simulación se toman cuatro Redes, en las cuales se instalan el SVC, el
STATCOM y el UPFC, mencionados en la teoría anteriormente expuesta.
En lo que respecta a longitud, las líneas se dividen en cortas, medias y largas:
Líneas cortas. Dentro de esta categoría están las líneas de transporte de hasta 80
Km. (50 millas).
Líneas medias. Se denominan líneas medias aquellas líneas de transporte que
tienen una longitud entre 80 y 240 Km. (50 a 150 millas).
Líneas largas. Son líneas de transporte que tienen una longitud superior a los 240
Km. (150 millas) y operan generalmente con valores altos de voltaje, del orden
de 230 y 500 KV.
Para este TFM las líneas de gran longitud son líneas de transporte que tienen una
longitud superior o igual a los 300 Km.
11.1. REDES QUE SE IMPLEMENTAN
11.1.1. Red 1
La Red 1 consta de una máquina G1 unida a un nudo infinito con carga mediante
dos líneas de gran longitud (desde el bus AT hasta AT carga) que podrán ser de 300 o
400 km y transportan aproximadamente 800 MW.
Ilustración 42: Red 1
11.1.2. Red 2
La Red 2 consta de tres máquinas y cuatro cargas donde la máquina G2
representa un área mientras G1 y G3 pertenecen a otra área. Estas áreas están unidas
mediante dos líneas de gran longitud (desde bus 7 hasta bus 5) que podrán ser de 300 o

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
61
400 km más una línea de 200 km (desde el bus 7 hasta el bus 8). El intercambio
aproximado de potencia entre áreas es de 340 MW.
Ilustración 43: Red 2
11.1.3. Red 3
La Red 3 está compuesta por tres máquinas y cuatro cargas donde la máquina
G2 representa un área mientras G1 y G3 pertenecen a otra área. Estas áreas están unidas
mediante dos líneas de gran longitud (desde el bus 7 hasta el bus 5) que podrán ser de
300 o 400 km. El intercambio aproximado de potencia entre áreas es de 360 MW.
Ilustración 44: Red 3
11.1.4. Red 4
La Red 4 consta de tres máquinas (estas máquinas tienen el doble de potencia) y
dos cargas donde la máquina G2 -que representa un área- está unida a G1 y G3 que

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
62
representan otra área mediante dos líneas de gran longitud de 1000 km (desde el bus 1
hasta el bus 3). El intercambio aproximado de potencia entre áreas es de 2200 MW.
Ilustración 45: Red 4
11.2. COMPONENTES DE LAS REDES
11.2.1. Generador
Los generadores tienen estas características. Potencia nominal: 950 MVA Tensión nominal: 24 kV Conexión: YN Reactancia síncrona: xd = 1,81 p.u. xq = 1,76 p.u. Reactancias transitorias y subtransitorias: xd´ = 0,3 p.u. xd´´ = 0,23 p.u. xq´ = 0,65 p.u. xq´´ = 0,25 p.u. Constantes de tiempo transitorias y subtransitorias: Td´= 1,47 s Td´´= 0,023 Tq´= 0,37 s Tq´´= 0,027
11.2.2. Transformador
El transformador de cada generador posee las siguientes características.
Potencia aparente: 1000MVA Frecuencia: 50Hz Tensiones alta/baja: 500/24 kV

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
63
Tensión de cortocircuito del transformador: 15%
11.2.3. Líneas
Tensión nominal: 500 kV Resistencias: R = 0,05 Ω/km Ro= 0,2 Ω/km Reactancias: X = 0,25 Ω/km Xo= 1 Ω/km Susceptancias: B = 4,14 𝜇S/km Bo = 0 𝜇S/km
11.2.4. Red externa (Nudo infinito en red 1)
Tipo de bus: nudo infinito Slack Tensión: 1 p.u.
11.2.5. Cargas
Cargas en la red 1:
Carga: P= 1000 MW y Q= 512,3 Mvar
Cargas en la red 2 y red 3:
A: P= 1000 MW y Q= 350 Mvar B: P= 450 MW y Q= 50 Mvar C: P= 200 MW y Q= 26 Mvar D: P= 500 MW y Q= 100 Mvar
Cargas en la red 4:
E: P= 3500 MW y Q= 1793,1 Mvar F: P= 1000 MW y Q= 512,3 Mvar
11.3. UBICACIÓN DE LOS FACTS EN LAS REDES
Cuando los dispositivos FACTS se ubican en medio de las líneas de gran longitud,
juegan un papel importante controlando el flujo de potencia reactiva en la red eléctrica,
por ende repercute en las fluctuaciones de voltaje y la estabilidad transitoria. Se verifica
que colocándolos ligeramente al centro este contribuye al mejor desempeño y mejora
de la estabilidad transitoria. [35]

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
64
Para la Red 1 se ubica el SVC, el STATCOM o el UPFC en el bus AT () en medio de
las líneas.
Ilustración 46: Ubicación de los FACTS en la Red 1
Para la Red 2 y la Red 3 se ubica el SVC, el STATCOM o el UPFC en el Bus 7() en
medio de las líneas.
Ilustración 47: Ubicación de los FACTS en la Red 2 y en la Red 3
Para la Red 4 se ubica el SVC, el STATCOM o el UPFC en el bus 2 en medio de las
líneas.
Ilustración 48: Ubicación de los FACTS en la Red 4

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
65
11.4. SVC
11.4.1. Componentes y características del SVC
11.4.1.1. Transformador del SVC
Ilustración 49: Datos del transformador en el SVC
11.4.1.2. Static Var System
Ilustración 50: Datos del Static Var System en el SVC
11.5. STATCOM
11.5.1. Componentes y características del STATCOM
11.5.1.1. Transformador del STATCOM

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
66
Ilustración 51: Datos del transformador en el STATCOM
11.5.1.2. Inversor del STATCOM
Ilustración 52: Datos del inversor en el STATCOM

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
67
11.5.1.3. Condensador del STATCOM
Ilustración 53: Datos del condensador en el STATCOM
11.6. UPFC
11.6.1. Componentes y características del UPFC
11.6.1.1. Transformador serie del UPFC
Ilustración 54: Datos de transformador serie en el UPFC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
68
11.6.1.2. Transformador paralelo del UPFC
Ilustración 55: Datos de transformador paralelo en el UPFC
11.6.1.3. Inversor serie del UPFC
Ilustración 56: Datos del inversor serie del UPFC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
69
11.6.1.4. Inversor paralelo del UPFC
Ilustración 57: Datos del inversor paralelo del UPFC
11.6.1.5. Condensador del UPFC
Ilustración 58: Datos del condensador para el UPFC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
70
11.7. MODELOS Y CONTROLADORES
11.7.1. Definiciones
Composite Model (Modelo compuesto)
Un Composite Model es una estructura que se usa para administrar los modelos
asociados a una máquina o a un sistema de control. En éste se seleccionan todos los
modelos y elementos que se deseen relacionar [22].
Composite Frame (Marco compuesto)
Un Composite Frame, o simplemente Frame, es una plantilla o estructura de
conexionado en la que se definen las interfaces o vías de comunicación de las distintas
señales entre los slots que van a definirse dentro de un Composite Model.
Common Model (Modelo general)
Un Common Model es un objeto que proporciona una interfaz de comunicación
entre el usuario y el modelo de control. Esta interfaz es realizada mediante la
configuración de un conjunto de parámetros, los cuales sirven para ajustar el modelo.
Composite Block Diagram (Diagrama de bloques)
Un diagrama de bloques es una representación gráfica de una función
matemática que produce una o más señales de salida como función de una o más
señales de entrada. Un diagrama de bloques también puede tener límites (valores
mínimos y máximos) como señales de entrada.
Se tiene en cuenta que la base teórica para el modelado que se usa en este trabajo es
obtenida de las librerías internas del programa DigSILENT, por tanto, pueden ser
consideradas modelos estándar de los FACTS que se usan en este trabajo.
11.7.2. Generador
Para el generador se elige el modelo compuesto estándar SYM Frame_no droop,
ya que este dispone slots para incorporar el AVR y el PSS. Este modelo se encuentra en
la librería interna del programa.

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
71
Ilustración 59: Composite Frame - Conexionado para el Generador

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
72
Ilustración 60: Composite Model – Interfaz para el generador y sus controles
11.7.2.1. AVR
Para el AVR se elige el EXCITER–EXAC4 IEEE Modified Type AC4A Excitation System
model, ya que Kundur lo señala como uno de los 12 modelos en diagrama de bloques para
representar el sistema de excitación. Este modelo y diagrama de bloques se encuentran en
la librería interna del programa.
Ilustración 61: Diagrama de bloques del AVR

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
73
Ilustración 62: Common Model del AVR
11.7.2.2. PSS
Para el PSS se elige el pss_STAB2A: Power system stabilizing unit (ASEA), ya que es uno
de los modelos de la IEEE para representar un sistemas de estabilización. Este modelo y su
diagrama de bloques se encuentran en la librería interna del programa.
Ilustración 63: Diagrama de bloques del PPS

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
74
Ilustración 64: Common Model del PSS
11.7.3. SVC
Para el SVC se elige el modelo compuesto Composite Type SVS como base para luego
modificarlo y obtener Composite Type SVS(mod), ya que este último dispone de una señal de
entrada al slot del controlador-SVS. Este modelo se encuentra en la librería interna del
programa.
Ilustración 65: Composite Frame para el SVC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
75
Ilustración 66: Composite Model para el SVC y para sus controladores
11.7.3.1. SVS
Para el controlador SVS (Static var system) se elige el svc_CSVGN4: Static Shunt
Compensator, ya que éste es uno de los dos modelos de la IEEE y además solo este modelo
era compatible con el modelo compuesto del SVC. Este modelo y diagrama de bloques se
encuentran en la librería interna del programa.
Ilustración 67: Diagrama de bloques - Controlador del SVS

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
76
Ilustración 68: Common Model - Controlador del SVS
11.7.4. STATCOM
Para el STATCOM se elige el siguiente modelo compuesto, ya que este modelo es usado en uno de los ejemplos en el propio programa. Este modelo y diagrama de bloques se encuentran en la librería interna del programa.
Ilustración 69: Composite Frame para el STATCOM

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
77
Ilustración 70: Composite Model del STATCOM y sus Controladores
11.7.4.1. Controlador de corriente
Ilustración 71: Common Model - Controlador de corriente del STATCOM
Ilustración 72: Diagrama de bloques - Controlador de corriente del STATCOM

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
78
11.7.4.2. Controlador de tensión DC
Ilustración 73: Diagrama de bloques - Controlador de tensión DC del STATCOM
Ilustración 74: Common Model - Controlador de tensión DC del STATCOM
11.7.5. UPFC
Para el UPFC se eligen los siguientes modelos compuestos, tanto para la parte serie como el parte paralelo, ya que estos modelos son usados en uno de los ejemplos en el propio programa. Estos modelos y diagramas de bloques se encuentran en la librería interna del programa.

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
79
11.7.5.1. Serie
Ilustración 75: Composite Frame - SSSC del UPFC
Ilustración 76: Composite Model - SSSC y sus controladores en UPFC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
80
11.7.5.1.1. Controlador de corriente
Ilustración 77: Diagrama de bloques - Controlador de corriente para el SSSC del UPFC
Ilustración 78: Common Model - Controlador de corriente para el SSSC del UPFC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
81
11.7.5.1.2. Controlador PQ
Ilustración 79: Diagrama de bloques - Controlador PQ para SSSC del UPFC
Ilustración 80: Common Model - Controlador PQ para SSSC del UPFC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
82
11.7.6. Paralelo
Ilustración 81: Composite Frame - STATCOM del UPFC
Ilustración 82: Composite Model - STATCOM y sus controladores en UPFC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
83
11.7.6.1. Controlador de corriente
Ilustración 83: Diagrama de bloques - Controlador de corriente para el STATCOM del UPFC
Ilustración 84: Common Model - Controlador de corriente para el STATCOM del UPFC

XI IMPLEMENTACIÓN EN DIGSILENT - POWER FACTORY
84
11.7.6.2. Controlador de tensión DC
Ilustración 85: Diagrama de bloques - Controlador de tensión DC para el STATCOM del UPFC
Ilustración 86: Common Model - Controlador de tensión DC para el STATCOM del UPFC

XII SIMULACIÓN
85
12. SIMULACIÓN
Con el fin de comprobar la mejora de la estabilidad transitoria en líneas de gran
longitud mediante FACTS, y según la teoría explicada anteriormente, se implementan los
dispositivos, los modelos y los controladores en el programa Digsilent- Power Factory [22] -
[23].
La pérdida de sincronismos en un grupo de generadores suele darse cuando un exceso
de potencia mecánica de entrada, supera a la potencia eléctrica de salida, acelerando el rotor,
de tal modo que se almacena energía cinética en el mismo, y el ángulo se incrementa.
12.1. PRIMER CASO
Se comparan los resultados tras implementar los 3 FACTS en la Red 1 si la línea entre
los buses AT y AT CARGA se pasa de 300 km a 400 km de longitud y si es sometida a un
cortocircuito entre los buses AT() y AT CARGA.
Ilustración 87: Cortocircuito en una línea entre los buses AT() y AT CARGA para la Red 1
12.2. SEGUNDO CASO
Se comparan los resultados resultantes tras implementar los 3 FACTS en la Red 2 si la
línea entre los buses 7 y 5 se pasa de 300 km a 400 km de longitud y es sometida a un
cortocircuito entre los buses 7() y 5.
Ilustración 88: Cortocircuito en una línea entre los buses 7 () y 5 para la Red 2

XII SIMULACIÓN
86
12.3. TERCER CASO
Se comparan los resultados tras implementar los 3 FACTS en la Red 3 si la línea entre
los buses 7 y 5 se pasa de 300 km a 400 km de longitud y es sometida a un cortocircuito entre
los buses 7() y 5.
Ilustración 89: Cortocircuito en una línea entre los buses 7 () y 5 para la Red 3
12.4. CUARTO CASO
Se comparan los resultados obtenidos tras implementar los 3 FACTS en la Red 4 si la
línea es sometida a un cortocircuito entre los buses 2 y 3.
Ilustración 90: Cortocircuito en una línea entre los buses 2 y 3 para la Red 4
12.5. QUINTO CASO: SIMULACIÓN DE INTERÉS
En la red 4 las líneas de gran longitud transportan aproximadamente 2000 MW; si
pretendemos transportar, por ejemplo, 3000 MW es necesario realizar las modificaciones
pertinentes a la red para que el flujo de potencia converja y se obtiene la Red 5. Será entonces

XII SIMULACIÓN
87
cuando se simule una gran perturbación, lo mismo que sucedía en el cuarto caso. La ilustración
137 corresponde a la red 5.
En este quinto caso la simulación representa una interconexión internacional, dos
países interconectados mediante una línea de 1000 km que transporta 3000 MW.
En los cinco casos anteriores, las pruebas se someten a una gran perturbación
mediante un cortocircuito trifásico que inicia en t= 0 y termina con un despeje
de falta en t= 300 ms.
12.6. RESULTADOS: PRIMER CASO
12.6.1. Red 1 sin FACTS
Condiciones iniciales: 𝛿𝐺1= 59, a simple vista este ángulo parece ser muy elevado, pero
hay que tener en cuenta que el ángulo del rotor es medido respecto al de una máquina de
referencia que en este caso concreto no lo tenemos y el start time de las condiciones iniciales
se fija a -0,1 s.
Tras la perturbación, se muestran en las ilustraciones 91 y 92 el ángulo y la velocidad
del rotor respectivamente del generador en la Red 1 sin FACTS.
Ilustración 91: Primer caso. Ángulo del rotor – Red 1 sin FACTS Ilustración 92: Primer caso. Velocidad del rotor - Red 1 sin FACTS
Se aprecia cómo el generador pierde el sincronismo y se acelera.
12.6.2. Red 1 con SVC, STATCOM y UPFC
12.6.2.1. Sincronismo

XII SIMULACIÓN
88
Tras la perturbación, se muestra en las ilustraciones 93 y 94 el ángulo del rotor del
generador con el FACTS instalado en la Red 1.
Ilustración 93: Primer caso. Ángulo del rotor – Red 1 con SVC,
STATCOM y UPFC (Línea de 300 km)
Ilustración 94: Primer caso. Ángulo del rotor – Red 1 con
SVC, STATCOM y UPFC (Línea de 400 km)
Al comparar los resultados, se observa que la diferencia más notoria es para el SVC ya
que para la línea de 300 km el ángulo del rotor es más amortiguado, pero aun así, los
tres FACTS contribuyen a la mejora en la estabilidad transitoria y se corrobora la
superioridad del UPFC y del STATCOM sobre el SVC.
12.6.2.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 95 y 96 la velocidad del rotor del
generador respecto al FACTS instalado en la Red 1.
Ilustración 95: Primer caso. Velocidad del rotor - Red 1 con
SVC, STATCOM y UPFC (línea de 300 km)
Ilustración 96: Primer caso. Velocidad del rotor - Red 1 con SVC, STATCOM y UPFC (línea de 400 km)
Al comparar los resultados, se observa que la principal diferencia es para el SVC ya que
para la línea de 300 km la velocidad del rotor retorna más rápido a una velocidad
constante pero, aun así, los tres FACTS contribuyen a la mejora en la estabilidad y se
comprueba la superioridad del UPFC y del STATCOM sobre el SVC.

XII SIMULACIÓN
89
12.7. RESULTADOS: SEGUNDO CASO
12.7.1. Red 2 sin FACTS
Tras la perturbación, se muestra en las ilustraciones 97 y 98 el ángulo y la velocidad
respectivamente de los tres generadores en la Red 2 sin FACTS.
Ilustración 97: Segundo caso. Ángulo del rotor de G1, G2 y
G3 en la Red 2 sin FACTS
Ilustración 98: Segundo caso. Velocidad del rotor de G1
G2 y G3 en la Red 2 sin FACTS
Se puede ver que los tres generadores pierden el sincronismo y que el generador G1
se acelera.
12.7.2. Red 2 con el SVC
12.7.2.1. Sincronismo
Tras la perturbación, se muestra en las ilustraciones 99 y 100 el ángulo del rotor de los
tres generadores cuando se instala el SVC en la Red 2.
Ilustración 99: Segundo caso. Ángulo del rotor de G1, G2 y
G3 en la Red 2 con el SVC (línea de 300 km)
Ilustración 100: Segundo caso. Ángulo del rotor de G1, G2 y
G3 en la Red 2 con el SVC (línea de 400 km)
Al comparar los resultados, se observa que la principal diferencia es para el generador
G3 ya que en la Red con línea de 300 km el ángulo del rotor oscila más en fase con los

XII SIMULACIÓN
90
otros rotores. Aún así, se comprueba que el SVC contribuye a la mejora en la
estabilidad transitoria.
12.7.2.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 101 y 102 la velocidad del rotor
de los tres generadores cuando se instala el SVC en la Red 2.
Ilustración 101: Segundo caso. Velocidad del rotor de G1,
G2 y G3 en la Red 2 con el SVC (línea de 300 km)
Ilustración 102: Segundo caso. Velocidad del rotor de G1, G2
y G3 en la Red 2 para el SVC (línea de 400 km)
Al comparar los resultados, no se observa mucha diferencia entre ambos ya que la
velocidad del rotor retorna a una velocidad constante comprobándose que el SVC
ayuda a estabilizar la velocidad del rotor.
12.7.3. Red 2 con el STATCOM
12.7.3.1. Sincronismo
Tras la perturbación, se muestra en las ilustraciones 103 y 104 el ángulo del rotor de
los tres generadores cuando se instala el STATCOM en la Red 2.
Ilustración 103: Segundo caso. Ángulo del rotor de G1, G2 y
G3 en la Red 2 con el STATCOM (línea de 300 km)
Ilustración 104: Segundo caso. Ángulo del rotor de G1, G2 y
G3 en la Red 2 con el STATCOM (línea de 400 km)

XII SIMULACIÓN
91
Al comparar los resultados, se observa que prácticamente no hay diferencia ya que en la
Red con línea de 300 km o 400 km los ángulos de los rotores se comportan de manera
similar. Así, se comprueba que el STATCOM contribuye a la mejora en la estabilidad
transitoria.
12.7.3.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 105 y 106 la velocidad del rotor
de los tres generadores cuando se instala el STATCOM en la Red 2.
Ilustración 105: Segundo caso. Velocidad del rotor de G1,
G2 y G3 en la Red 2 con el STATCOM (línea de 300 km)
Ilustración 106: Segundo caso. Velocidad del rotor de G1, G2
y G3 en la Red 2 con el STATCOM (línea de 400 km)
Al comparar los resultados, se observa que prácticamente no hay diferencia ya que en la Red con línea de 300 km o 400 km los ángulos de los rotores se comportan de manera similar y se comprueba que el STATCOM contribuye a la mejora en la estabilidad.
12.7.4. Red 2 con el UPFC
12.7.4.1. Sincronismo
Tras la perturbación, se muestra en las ilustraciones 107 y 108 el ángulo del rotor de
los tres generadores cuando se instala el UPFC en la Red 2.

XII SIMULACIÓN
92
Ilustración 107: Segundo caso. Ángulo del rotor de G1, G2
y G3 en la Red 2 con el UPFC (línea de 300 km)
Ilustración 108: Segundo caso. Ángulo del rotor de G1, G2 y
G3 en la Red 2 con el UPFC (línea de 400 km)
Al comparar los resultados, se observa que la principal diferencia es para el G3 ya que
en la Red con línea de 400 km el ángulo del rotor oscila con mayor amplitud pero, aún
así, el UPFC –como puede observarse- contribuye a la mejora en la estabilidad
transitoria.
12.7.4.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 109 y 110 la velocidad del rotor
de los tres generadores cuando se instala el UPFC en la Red 2.
Ilustración 109: Segundo caso. Velocidad del rotor de G1, G2 y G3 en la Red 2 con el UPFC (línea de 300 km)
Ilustración 110: Segundo caso. Velocidad del rotor de G1,
G2 y G3 en la Red 2 con el UPFC (línea de 400 km)
Al comparar los resultados, se puede ver que en la línea de 300 km hay mayor
oscilación para alcanzar una velocidad constante, pero aún así, los tres FACTS
contribuyen a la mejora en la estabilidad.

XII SIMULACIÓN
93
12.7.5. Red 2 (generador G3) con SVC vs STATCOM vs UPFC
Se comparan las mejoras que aportan los distintos FACTS en el generador G3, ya que
éste es el que presentó mayor oscilación en las simulaciones anteriores.
12.7.5.1. Sincronismo
Tras la perturbación, se muestra en las ilustraciones 111 y 112 el ángulo de rotor del
generador G3 cuando se instalan los FACTS en la Red 2.
Ilustración 111: Segundo caso. Ángulo del rotor de G3
en la Red 2 con SVC, STATCOM y UPFC (línea de 300 km)
Ilustración 112: Segundo caso. Ángulo del rotor de G3 en la
Red 2 con SVC, STATCOM y UPFC (línea de 400 km)
Al comparar los resultados, se observa que la principal diferencia es para el UPFC ya
que en la Red 2 con línea de 400 km el ángulo del rotor oscila con mayor amplitud. De
cualquier modo, los tres FACTS contribuyen a la mejora en la estabilidad transitoria
comprobándose la superioridad del UPFC y del STATCOM sobre el SVC.
12.7.5.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 113 y 114 el ángulo del rotor del
generador G3 cuando se instalan los FACTS en la Red 2.

XII SIMULACIÓN
94
Ilustración 113: 2do Caso, velocidad del rotor de G3 en la Red
2 con SVC, STATCOM y UPFC (línea de 300 km)
Ilustración 114: 2do Caso, ángulo del rotor de G3 en la Red 2
con SVC, STATCOM y UPFC (línea de 400 km)
Al comparar los resultados, se puede ver que la diferencia más notoria es para el UPFC
ya que en la línea de 300 km se alcanza una velocidad constante en menor tiempo,
pero aun así, los tres FACTS contribuyen a la mejora de la estabilidad.
12.8. RESULTADOS: TERCER CASO
12.8.1. Red 3 sin FACTS
Tras la perturbación, se muestra en las ilustraciones 115 y 116 el ángulo y la velocidad
respectivamente de los tres generadores en la Red 3 sin FACTS.
Ilustración 115: Tercer caso. Ángulo del rotor de G1, G2 y G3
en la Red 3 sin FACTS
Ilustración 116: Tercer caso. Velocidad del rotor de G1, G2
y G3 en la Red 3 sin FACTS
Se observa cómo los tres generadores pierden el sincronismo y el generador G1 se
acelera.
12.8.2. Red 3 con el SVC
12.8.2.1. Sincronismo

XII SIMULACIÓN
95
Tras la perturbación, se muestra en las ilustraciones 117 y 118 el ángulo del rotor de
los tres generadores cuando se instala el SVC en la Red 3.
Ilustración 117: Tercer caso. Ángulo del rotor de G1, G2 y
G3 en la Red 3 con el SVC (línea de 300 km)
Ilustración 118: Tercer caso. Ángulo del rotor de G1, G2 y G3
en la Red 3 con el SVC (línea de 400 km)
Al comparar los resultados, se observa que la principal diferencia es para el generador
G3 ya que en la Red con línea de 300 km el ángulo del rotor oscila con mayor amplitud.
Sin embargo, y a pesar de ello, se comprueba que el SVC contribuye a la mejora en la
estabilidad transitoria.
12.8.2.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 119 y 120 la velocidad del rotor
de los tres generadores cuando se instala el SVC en la Red 3.
Ilustración 119: Tercer caso. Velocidad del rotor de G1, G2 y
G3 en la Red 3 con el SVC (línea de 300 km)
Ilustración 120: Tercer caso. Velocidad del rotor de
G1, G2 y G3 en la Red 3 con el SVC (línea de 400 km)
Comparando los resultados, podemos observar que prácticamente no hay diferencia
entre ambos ya que en la red con línea de 300 km o 400 km los ángulos de los rotores
se comportan de manera muy similar. Por ello, comprobamos cómo el SVC contribuye a
la mejora en la estabilidad.

XII SIMULACIÓN
96
12.8.3. Red 3 con STATCOM
12.8.3.1. Sincronismo
Tras la perturbación, se muestra en las ilustraciones 121 y 122 el ángulo del rotor de
los tres generadores cuando se instala el STATCOM en la Red 3.
Ilustración 121: Tercer caso. Ángulo del rotor de G1, G2 y
G3 en la Red 3 con el STATCOM (línea de 300 km)
Ilustración 122: Tercer caso. Ángulo del rotor de G1, G2 y G3
en la Red 3 con el STATCOM (línea de 400 km)
Al comparar los resultados, se observa que la principal diferencia se da en el generador
G2 ya que en la Red con línea de 400 km el ángulo del rotor oscila con mayor amplitud.
Así, con todo, se comprueba que el STATCOM contribuye a la mejora en la estabilidad
transitoria.
12.8.3.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 123 y 124 la velocidad del rotor
de los tres generadores cuando se instala el STATCOM en la Red 3.
Ilustración 123: Tercer caso. Velocidad del rotor de G1, G2 y
G3 en la Red 3 con el STATCOM (línea de 300 km)
Ilustración 124: Tercer caso. Velocidad del rotor de G1, G2 y
G3 en la Red 3 con el STATCOM (línea de 400 km)
Al comparar los resultados, se observa que prácticamente no hay diferencia entre ellos
ya que en la Red con línea de 300 km o 400 km los ángulos de los rotores se comportan

XII SIMULACIÓN
97
de manera similar. Con ello, se corrobora que el STATCOM contribuye a la mejora en la
estabilidad.
12.8.4. Red 3 con UPFC
12.8.4.1. Sincronismo
Tras la perturbación, se muestra en las ilustraciones 125 y 126 el ángulo del rotor de
los tres generadores al instalar el UPFC en la Red 3.
Ilustración 125: Tercer caso. Ángulo del rotor de G1, G2 y G3
en la Red 3 con el UPFC (línea de 300 km)
)
Ilustración 126: Tercer caso. Ángulo del rotor de G1, G2 y
G3 en la Red 3 con el UPFC (línea de 400 km)
Al comparar los resultados, se observa que la principal diferencia es para el generador G2
ya que en la Red con línea de 300 km el ángulo del rotor oscila con mayor amplitud. A
pesar de ello, se comprueba que el UPFC contribuye a la mejora en la estabilidad
transitoria.
12.8.4.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 127 y 128 la velocidad del rotor
de los tres generadores instalando el UPFC en la Red 3.
Ilustración 127: Tercer caso. Velocidad del rotor de G1, G2 y
G3 en la Red 3 con el UPFC (línea de 300 km)
Ilustración 128: Tercer caso. Velocidad del rotor de G1, G2
y G3 en la Red 3 con el UPFC (línea de 400 km)

XII SIMULACIÓN
98
Al comparar los resultados, observamos que prácticamente no hay diferencia entre
ambos ya que en la Red con línea de 300 km o 400 km los ángulos de los rotores se
comportan de manera similar comprobándose que el UPFC contribuye a la mejora en
la estabilidad.
12.8.5. Red 3 (generador G2) con SVC, STATCOM y UPFC
Se comparan las mejoras que aportan los distintos FACTS en el generador G2, ya que
éste es el que presentó mayor oscilación en las simulaciones anteriores.
12.8.5.1. Sincronismo
Tras la perturbación, se muestra en las ilustraciones 129 y 130 el ángulo de rotor del
generador G2 cuando se instalan los FACTS en la Red 3.
Ilustración 129: Tercer caso. Ángulo del rotor de G2 en la Red 3 con SVC, STATCOM y UPFC (línea de 300 km)
Ilustración 130: Tercer caso. Ángulo del rotor de G2 en la
Red 3 con SVC, STATCOM y UPFC (línea de 400 km)
Al comparar los resultados, se observa que las principales diferencias son para el SVC
y para el STATCOM ya que en la Red con línea de 400 km el ángulo del rotor oscila con
mayor amplitud. De cualquier modo, se comprueba cómo los tres FACTS contribuyen
a la mejora en la estabilidad transitoria.
12.8.5.2. Velocidad del rotor
Tras la perturbación, se muestra en las ilustraciones 131 y 132 el ángulo del rotor del
generador G3 cuando se instalan los FACTS en la Red 3.

XII SIMULACIÓN
99
Ilustración 131: Tercer caso. Ángulo del rotor de G2 en la Red 3 con SVC, STATCOM y UPFC (línea de 300 km)
Ilustración 132: Tercer caso. Ángulo del rotor de G2 en la Red 3 con SVC, STATCOM y UPFC (línea de 400
km)
)
Al comparar los resultados, se observa que prácticamente no hay diferencia
entrambos ya que en la red con línea de 300 km o 400 km los ángulos de los rotores se
comportan de manera similar comprobando, de este modo, que el UPFC contribuye a
la mejora en la estabilidad.
12.9. RESULTADOS: CUARTO CASO
12.9.1. Red 4 sin FACTS
Tras la perturbación, se muestra en la ilustración 133 el ángulo y la velocidad del rotor
de los 3 generadores en la Red 4 sin FACTS.
Ilustración 133: Cuarto caso. Ángulo de rotor y velocidad de G1, G2 y G3 en la Red 4 sin FACTS (línea de 1000 km)
Se observa que los tres generadores pierden el sincronismo y G1 y G3 se aceleran.
12.9.2. Red 4 con el SVC
Tras la perturbación, se muestra en la ilustración 134 el ángulo del rotor y la velocidad
de los tres generadores al instalar el SVC en la Red 4.

XII SIMULACIÓN
100
Ilustración 134: Cuarto caso. Ángulo de rotor y velocidad de G1, G2 y G3 en la Red 4 con SVC (línea de 1000 km)
Al analizar los resultados, se aprecia cómo los ángulos de los rotores de G1 y G3 son
amortiguados después de la perturbación y que por su parte la velocidad tiende a ser
constante. El SVC, además, contribuye a la mejora en la estabilidad transitoria.
12.9.3. Red 4 con el STATCOM
Tras la perturbación, se muestra en la ilustración 135 el ángulo del rotor y la velocidad
de los tres generadores cuando se instala el STATCOM en la Red 4.
Ilustración 135: Cuarto caso. Ángulo de rotor y velocidad de G1, G2 y G3 en la Red 4 con STATCOM (línea de 1000 km)
Al analizar los resultados, se observa que los ángulos de los rotores de G1 y G3 son
amortiguados después de la perturbación y que la velocidad tiende a ser constante.
Por otro lado, puede comprobarse cómo el STATCOM contribuye a la mejora en la
estabilidad transitoria.
12.9.4. Red 4 con el UPFC
Tras la perturbación, se muestra en la ilustración 136 el ángulo del rotor y la velocidad
de los tres generadores cuando se instala el UPFC en la Red 4.

XII SIMULACIÓN
101
Ilustración 136: Cuarto caso. Ángulo de rotor y velocidad de G1, G2 y G3 en la Red 4 con UPFC (línea de 1000 km)
Al analizar los resultados, se observa cómo los ángulos de los rotores de G1 y G3 son
amortiguados después de la perturbación y cómo la velocidad tiende a ser constante.
Finalmente, comprobamos que el UPFC contribuye a la mejora en la estabilidad
transitoria.
Es importante mencionar que en la mayoría de las simulaciones anteriores los ángulos de los
rotores no retornan al mismo valor inicial, esto sucede porque las potencias que suministran
los generadores después de la falta son ligeramente distintas que las potencias suministradas
antes de la falta, por otro lado los ángulos de los rotores parecen ser muy grandes, se recuerda
que esos ángulos están medidos respecto a una máquina de referencia, entonces si se mide el
ángulo del rotor de una máquina respecto a su nudo local se puede afirmar que esos ángulos
de los rotores no son tan elevados, y también se observa que las oscilaciones del ángulo del
rotor son mayores con el SVC que con el STATCOM o UPFC, esto sucede porque estos dos
últimos llevan inversores de fuente de tensión que son capaces de actuar en cuestión de un
ciclo y tienen la ventaja de suministrar más potencia reactiva cuando la tensión del sistema es
baja.

XII SIMULACIÓN
102
12.10. RESULTADOS: QUINTO CASO, SIMULACIÓN DE INTERÉS
Ilustración 137: Red 5 (posición de los FACTS y de la gran perturbación)
12.10.1. Red 5 sin FACTS
Tras la perturbación, se muestra en la ilustración 138 el ángulo del rotor y la velocidad
de los tres generadores en la Red 5 sin FACTS.
Ilustración 138: Sincronismo y velocidad del rotor de G1, G2 y G3 tras el cortocircuito en línea de 1000 km de longitud en la Red 5 sin FACTS e intercambio de potencia entre áreas de 3000 MW
12.10.2. Red 5 con FACTS
Tras la perturbación, se muestra en las ilustraciones 139, 140 y 141 el ángulo del rotor
así como la velocidad de los tres generadores cuando se instala el SVC, el STATCOM y
el UPFC en la Red 5.

XII SIMULACIÓN
103
Ilustración 139: Sincronismo y velocidad del rotor de G1, G2 y G3 tras el cortocircuito en línea de 1000 km de longitud en la Red 5 con SVC e intercambio de potencia entre áreas de 3000 MW
Ilustración 140: Sincronismo y velocidad del rotor de G1, G2 y G3 tras el cortocircuito en línea de 1000 km de longitud en la Red 5 con STATCOM e intercambio de potencia entre áreas de 3000 MW
Ilustración 141: Sincronismo y velocidad del rotor de G1, G2 y G3 tras el cortocircuito en línea de 1000 km de longitud en la Red 5 con UPFC e intercambio de potencia entre áreas de 3000 MW
Al analizar los resultados de las simulaciones, comprobamos satisfactoriamente que el
SVC, el STATCOM y el UPFC mejoran la estabilidad transitoria de la red 5.

XII SIMULACIÓN
104
12.10.3. Interconexiones internacionales de España
Las interconexiones internacionales son el conjunto de infraestructuras eléctricas que
permiten el intercambio de energía entre países vecinos generando una serie de ventajas en
los países conectados [32].
Beneficios de las interconexiones:
Contribuyen a la seguridad del suministro facilitando funciones de apoyo entre
sistemas vecinos. Las interconexiones son el respaldo instantáneo más significativo a
la seguridad de suministro.
Aportan mayor estabilidad y garantía de la frecuencia en los sistemas interconectados.
Proporcionan un mejor aprovechamiento de las energías renovables.
Facilitan los intercambios comerciales de energía aumentando la competencia al
aprovechar las diferencias de precios de la energía en los sistemas eléctricos
interconectados.
Ilustración 142: Intercambio comercial previsto para 2016 [32]
Por tanto, los resultados de la simulación del quinto caso (Red 5) pueden ser utilizados
para simular las interconexiones de España -o de cualquier país con sus países vecinos-
pudiendo establecer líneas de gran longitud o no para dicha interconexión y teniendo en
cuenta que la estabilidad transitoria fue mejorada mediante los FACTS.

XIV BIBLIOGRAFÍA
105
13. CONCLUSIÓN
El presente trabajo fin de máster propone la posibilidad de incorporar los
dispositivos FATCS en líneas de gran longitud encauzados a mejorar la estabilidad
transitoria. Una de las cuestiones que planteamos en esta conclusión es el costo
económico que supondría dicha realización.
Para abordar el problema, sería necesario, en primer lugar, encontrar un medio
o, en su defecto, un dispositivo que sea capaz de compensar cada uno de los
desequilibrios que pudieran surgir. Con métodos tradicionales como el de la utilización
de la conexión y/o desconexión de elementos pasivos a la red es posible evitar la
pérdida de sincronismo en las máquinas. Sin embargo, esto impide una actuación veloz
y eficaz del problema ya que la estabilidad transitoria es uno de los más importantes. Si
se llegase a perder el sincronismo de las máquinas podría desencadenar un gran
problema en el sistema de potencia y entonces los métodos usuales y/o mecánicos no
parecerían una solución demasiado plausible.
Por tanto, la solución propuesta es el empleo y uso de los sistemas de
transmisión AC flexible (FATCS). El SVC, el STATCOM y el UPFC comparados mediante
las simulaciones realizadas con el programa DigSILENT Power Factory demuestran la
robustez de cada uno de ellos.
Este estudio de estabilidad permite conocer el comportamiento de un sistema
eléctrico de potencia al ser sometido a grandes perturbaciones (cortocircuitos)
erigiéndose como saberes de gran importancia, tanto desde el punto de vista de la
planificación -para una posible expansión del sistema- como desde el de operación ya
que sus resultados permitirán tomar las decisiones más adecuadas en cada uno de los
ámbitos.
Un conocimiento adecuado sobre el comportamiento del sistema en condiciones
dinámicas permite manejar adecuadamente los riesgos vinculados a las perturbaciones
y a las contingencias minimizando los efectos para el sistema y evitando, de esta manera,
las pérdidas económicas que el desconocimiento o la inacción podrían acarrear.
Por ello, los estudios de estabilidad, y en especial los de estabilidad transitoria,
alcanzan especial relevancia en el caso de sistemas eléctricos de ámbito nacional e
internacional que se interconectan entre sí. Por ejemplo, la interconexión de España-
Portugal, España-Francia, Francia-Italia, etc., es uno de ellos ya que en dichos casos será
posible llegar a identificar los perturbacións que, en el supuesto de presentarse,
provocarían condiciones de inestabilidad permitiendo, así, adoptar las medidas
preventivas tanto desde el punto de vista de protección y de operación, como desde los
aspectos estructurales del sistema.

XIV BIBLIOGRAFÍA
106
El estudio realizado en este trabajo fin de máster para titulación en “Máster en
sistemas de energía eléctrica” ha permitido corroborar que la complejidad de los
estudios de estabilidad transitoria en líneas de gran longitud no solamente radica en la
formulación matemática del problema, sino también en la implementación de los
modelos y controladores más adecuados que posibiliten encarnar apropiadamente a
cada uno de los elementos del sistema con el fin de que los resultados sean los
esperados en su representación con el comportamiento del sistema.
Tal y como se observa en las simulaciones, queda demostrado positivamente el
resultado de incorporar los distintos FACTS en los sistemas eléctricos de potencia
sometidos a grandes perturbaciones que corroborarían dicha teoría (FACTS mejoran la
estabilidad transitoria). Por ello, podemos afirmar que el resultado obtenido mediante
el uso del UPFC es claramente superior con respecto al del STATCOM y que a su vez el
STATCOM es superior al SVC ya que con el UPFC logramos alcanzar la estabilidad
transitoria con mayor rapidez en la mayor parte de las simulaciones. También se logró
llevar el estudio del quinto caso a casos reales como las interconexiones internacionales
y mediante dichas simulaciones se obtuvo resultados satisfactorios.
De otra parte, en lo referido al tema económico (tal y como se puede consultar
en la comparación de costos del capítulo 9 y teniendo en cuenta los FACTS utilizados en
las simulaciones de este trabajo) el uso del UPFC es el más caro seguido del STATCOM y
por último el del SVC. De acuerdo a los resultados que se obtienen en las simulaciones,
observamos que todos los FACTS realizan un trabajo eficaz logrando alcanzar la
estabilidad transitoria. Entonces, en estos casos, la disyuntiva es gastar más y alcanzar
la estabilidad transitoria con mayor rapidez mediante el UPFC o gastar menos y alcanzar
la estabilidad transitoria en mayor tiempo mediante el SVC. Sin embargo, también
habría una opción intermedia que es la representada por el STATCOM. Con todo esto,
es evidente que la elección final se hará mediante el análisis técnico y económico que
acarrea este estudio. También es necesario mencionar que a nivel de costes una
incidencia en las líneas de la red que se estudia en este trabajo puede llegar a suponer
una pérdida de suministro muy importante con el elevado coste económico y social que
supone.
Finalmente, el programa DIgSILENT PowerFactory (versión 15.1.2) ha sido una
importante y eficaz herramienta para este trabajo ya que mediante su interfaz es posible
realizar flujos de cargas, simulaciones de transitorios electromagnéticos, instrumentos
virtuales para visualizar resultados, lenguaje de programación de DigSILENT (DPL),
etcétera. A pesar de ser un programa robusto y con multitud de funciones, no es de
obviar los muchos errores que presenta y que, como he observado, suelen manifestarse
mientras más modelos (DPL) incluyamos en una misma simulación y sucedió muchas
veces que la simulación y/o el flujo de carga no convergía, teniendo en cuenta que no
cambié ningún parámetro para que ocurriera el fallo.
XIV BIBLIOGRAFÍA
107
14. BIBLIOGRAFÍA
[1] MONAGAS, EVA. “Transient stability analysis of a generation and transmission of
electricity”. Revista Ingeniería UC. Vol. 17. Número 3. Diciembre 2010. Páginas 57-67.
[2] HERNÁNDEZ, FRANCISCO. Conceptos sobre estabilidad de sistemas eléctricos de
potencia.
https://www.academia.edu/7584548/CONCEPTOS_SOBRE_ESTABILIDAD_DE_SISTEMA
S_ELECTRICOS_DE_POTENCIA
[3] PABLO LEDESMA. “Modelo dinámico del sistema eléctrico”. Operación y control de
sistemas dinámicos. Madrid, 2008.
[4] ADIELA ARENAS. Estabilidad en los Sistemas Eléctricos de Potencia con Generación
Renovable. OLADE. Quito, 2013.
[5] MARCO CAUDILLO. Equivalentes Dinámicos para estudios de Estabilidad Transitoria
de Sistemas Eléctricos de Potencia aplicando Coherencia. IPN. México D.F., 2012.
[6] N. G. HINGORANI. “High Power Electronics and flexible AC Transmission System”.
IEEE Power Engineering Review. Julio 1988.
[7] “Proposed terms and definitions for flexible AC transmission system (FACTS)”. IEEE
Transactions on Power Delivery. Vol 12. Número 4. Octubre 1997.
[8] EDGAR SIERRA. Compensador Estático Síncrono (STATCOM). UIS. Bucaramanga,
2006.
[9] SIEMENS. Discover the World of FACTS Technology. Siemens AG. Erlangen, 2011.
[10] ADEPOJU, G. A., KOMOLAFE, O.A. “Analysis and Modelling of Static Synchronous
Compensator (STATCOM)”. International Journal of Advanced Science and Technology.
Vol. 36. Noviembre 2011.
[11] XIAO-PING ZHANG. Flexible AC Transmission Systems: Modelling and Control.
Springer-Verlag. Berlin, 2012.
[12] SHAHNIA FARHAD. Static Compensators (STATCOMs) in Power Systems. Springer.
Singapur, 2015.
[13] YAO SHU-JUN, SONG XIAO-YA. “Research on dynamic characteristics of Unified
Power Flow Controller (UPFC)”. Electric Utility Deregulation and Restructuring and
Power Technologies (DRPT) IEEE. Páginas 490-493. Julio 2011.

XIV BIBLIOGRAFÍA
108
[14] LIE XU. “Comparison of Using SVC and STATCOM for Wind Farm Integration”. Power
System Technology IEEE. Febrero 2007.
[15] M EHRDAD AHMADI KAMARPOSHT. “Comparison of SVC, STATCOM, TCSC, and
UPFC Controllers for Static Voltage Stability Evaluated by Continuation Power Flow
Method”. Electric Power Conference. Enero 2009.
[16] ANTONIO GOMEZ EXPÓSITO. “Dispositivos FACTS para transporte”, Universidad de
Sevilla. Octubre 2014.
[17] ESTEBAN D. AGÜERO, JAIME C. CEPEDA, DELIA G. COLOMÉ. “FACTS models for
stability studies in DIgSILENT Power Factory”. Transmission & Distribution Conference
and Exposition IEEE. Noviembre 2014.
[18] S.H.H HOSSEINI. “Transient Stability Enhancement of AC Transmission System
Using STATCOM”. Communications, Control and Power Engineering IEEE. Febrero 2003.
[19] GHAZANFAR SHAHGHOLIAN, MEHDI MAHDAVIAN. “Improvement of Dynamic
Behavior and System Stability by Using STATCOM”. Industrial Electronics IEEE. Páginas
1057-1062. Agosto 2011.
[20] P. KUNDUR. Power System Stability and Control. McGraw-Hill Education; 1st edition.
New Yok, 1994.
[21] MOHAMED BOUDIAF, MOHAMED MOUDJAHED. Improvement of Transient Stability
of Power System by IPFC, SSSC and STATCOM. JEE. Argelia, 2010.
[22] DIgSILENT PowerFactory, Version 14.1. DIgSILENT GmbH. Germany, 2011.
[23] GONZALEZ LONGATT, JOSÉ LUIS RUEDA. PowerFactory applications for power
system analysis. Springer. Suiza 2014.
[24] GONZALES LONGATT. Entrenamiento Básico (DIgSILENT-Power Factory).
Septiembre 2004.
[25] ALFONSO ALZATE, CARLOS ANDRES TORRES, ANDRES ESCOBAR MEJIA. “Efectos de
un Compensador Serie Síncrono Estático (SSSC) en un Sistema de Potencia”. Scientia Et
Technica. Vol. 13. Número 37. Diciembre, 2007. Páginas 19-24.
[26] VAISHALI KURALKAR, SULABHA KULKARNI. “Power System Control Through
STATCOM and UPFC (FACTS)”. IJETAE. Vol. 2. Número 12, Diciembre 2012.
[27] ROLF GRÜNBAUM. “FACTS para mejorar la eficacia y la calidad de los sistemas de
transmisión de corriente alterna”. ingeniería y tecnología eléctricas (aplicaciones
eléctricas). Vol. 83. Numero 9. Paginas 525-530. Diciembre 2008.

XIV BIBLIOGRAFÍA
109
[28] RED ELÉCTRICA ESPAÑA. El Sistema Eléctrico Español Avance 2015. EPES Industrias
Gráficas, S.L. Madrid, 2016.
[29] G. BECK. Use of FACTS for Sytem Perfomance Improvement. SIEMENS. India 2006.
[30] RAJIV K. VARMA. Elements of FACTS Controllers. University of Western Ontario.
Canada
[31] SIEMENS. Discover the World of FACTS Technology. Siemens AG. Erlangen, 2011.
[32] RED ELÉCTRICA DE ESPAÑA. Interconexiones Eléctricas Internacionales,
http://www.ree.es/es/actividades/operacion-del-sistema-electrico/interconexiones-
internacionales.
[33] R. MIHALIC. “Improvement of Transient Stability using Unified Power Flow
Controller”. IEEE Transactions on Power Delivery. Vol. 11 Número 1. Páginas 485-492.
Enero 1996.
[34] R. PADIYAR. Power System Dynamic Stability and Control. BS Publications. India,
2008.
[35] SIDHARTHA PANDA. “Improving Power System Transient Stability with an off–
centre location of shunt facts devices”. Electrical Engineering. Vol. 57. Número 6.
Páginas 365-368. Eslovaquia, 2006.
[36] N. MITHULANANTHAN. “Comparison of PSS, SVC and STATCOM Controllers for
Damping Power System Oscillations”. IEEE Transactions on Power Systems. Vol.18.
Número 2. Páginas 786-792. Mayo 2003.
[37] E.Z. ZHOU. “Application of Static Var Compensators to Increase Power System
damping”. IEEE Transactions on Power Systems. Vol. 8. Número 2. Páginas 655-661.
Mayo 1993.
[38] P. MATTAVELLI. “Phasor Dynamics of Thyristor-Controlled Series Condensador
Systems”. IEEE Transactions on Power Systems. Vol. 12. Número 3. Páginas 1259-1267.
Agosto de 1997.
[39] A.D. DEL ROSSO. “A Study of TCSC Controller Design for Power System Stability
Improvement. IEEE Transactions on Power Systems. Vol. 18. Número 4. Páginas 1487-
1496. Noviembre 2003.
[40] M. NOROOZIAN. Use of UPFC for Optimal Power Flow Control. IEEE Transactions on
Power Delivery. Vol. 12. Número 4. Páginas 1929-1634. Octubre 1997.

XIV BIBLIOGRAFÍA
110
[41] P. KUMKRATUG. Versatile Model of a Unified Power Flow Controller in Simple
System. IEE Proceedings - Generation, Transmission and Distribution. Vol. 150. Número
2. Páginas 155-161. Marzo 2003.
[42] STATIC SYNCHRONOUS SERIES COMPENSATOR (SSSC), Mayo 2012.
http://www.powerqualityworld.com/2012/05/sssc-static-synchronous-series.html
[43] J. Van Coevering, J. P. Stovall, R. L. Hauth, P. J. Tatro, B. D. Railing, and B. K.
Johnson, “The Next Generation of HVDC — Needed R&D, Equipment Costs, and Cost
Comparisons” Proceedings of EPRI Conference on Future of Power Delivery,
Washington, DC, April 1996
[44] R. MOHAN MATHUR. Thyristor-based FACTS Controllers for Electrical Transmission
Systems. JOHN WILEY & SONS, INC. PUBLICATION. USA, 2002. Página 453.
[45] P. M. ANDERSON, AND A. A. FOUAD. Power System Control and Stability. JOHN
WILEY & SONS, INC. PUBLICATION. USA, 2003.
[46] J.L. AGÜERO. Diseño de un STATCOM para la mitigación del flicker producido por
hornos de arco eléctrico. CIGRE. Foz do Uguazú, 2007.
[47] L. GYUGYI. The unified power flow controllers: a new approach to power
transmission control. IEEE Trabsactions on Power Delivery. Vol. 12 Número 2. Páginas
1085-1097. Abril 1995.48
[48] CESAR AGUILAR, MARIAM CABRERA, MIRIAM LUCERO, Sistemas de excitación, 2012
[49] NED MOHAN. Electrónica de potencia. MC GRAW HILL. Mexico, 2009.
Related Documents











