ERROR BOUNDS FOR POLYNOMIAL AND SPLINE INTERPOLATION By GARY WILBUR HOWELL A DISSERTATION PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY UNIVERSITY OF FLORIDA 1986

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
ERROR BOUNDS FOR POLYNOMIAL AND SPLINE INTERPOLATION
By
GARY WILBUR HOWELL
A DISSERTATION PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN
PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY
UNIVERSITY OF FLORIDA
1986
Copyright 1986
by
Gary Wilbur Howell

To my wife, Nadia
ACKNOWLEDGEMENTS
I wish to express my sincerest appreciation to Dr.
Arun Varma for his research counseling and assistance
throughout my graduate school years. I wish also to thank
Ors. David Drake, Nicolae Dinculeanu, and Soo Bong Chae,
for their teaching and for encouraging me to pursue the
doctorate in mathematics, as well as Ors. Vasile Popov and
A. I. Khuri for their kindness in serving on my committee.
Finally of course, my parents and wife deserve rather more
thanks than can be easily expressed.
iv
TABLE OF CONTENTS
ACKNOWLEDGEMENTS •
ABSTRACT
CHAPTER
ONE
TWO
THREE
FOUR
INTRODUCTION
Lagrange and Hermite-Fejer Interpolation
Optimal Error Bounds for Two Point Hermite Interpolation
Birkhoff Interpolation Polynomial Approximation. Spline Approximation Parabolic Spline Interpolation • Optimal Error Bounds for Cubic
Spline Interpolation
BEST ERROR BOUNDS FOR DERIVATIVES OF TWO POINT LIDSTONE POLYNOMIALS
Introduction and Statement of Main Theorem
Preliminaries Proof of Theorem 3.1
A QUARTIC SPLINE
Introduction and Statement Theorems
Proof of Theorem 3.1
A QUARTIC SPLINE
Introduction and Statement Theorems
Proof of Lemma 4.1 . Proof of Theorem 4.1 Proof of Theorem 4.2
V
of
of
iv
vii
1
2
4 8
13 16 25
27
30
30 33 37
43
43 54
60
60 66 69 78

FIVE
SIX
IMPROVED ERROR BOUNDS FOR THE PARABOLIC SPLINE .
Introduction and Statement of Theorems
Proof of Theorem 5.1 Proof of Theorem 5.2 Proof of Theorem 5.3
CONCLUDING REMARKS
REFERENCES
BIOGRAPHICAL SKETCH
vi
81
85 85 88 98
107
110
113
Abstract of Dissertation Presented to the Graduate School of the University of Florida in Partial Fulfillment of the
Requirements for the Degree of Doctor of Philosophy
ERROR BOUNDS FOR POLYNOMIAL AND SPLINE INTERPOLATION
By
Gary Wilbur Howell
August 1986
Chairman: Dr. Arun K. Varma Major Department: Department of Mathematics
The present dissertation is motivated by a desire to
have a more precise knowledge of asymptotic approximation
error than that given by best order of approximation. It
owes its inspiration to a paper by G. Birkhoff and A. Priver
concerning error bounds for derivatives of Hermite
interpolation and a paper of C. A. Hall and w. W. Meyer
concerning error bounds for cubic splines.
In Chapter One we consider well known results
concerning interpolation, polynomial approximation and
error analysis of spline approximation. The results given
here are meant to provide a context for the theorems given
in later chapters. In Chapters Two and Three we consider
the problem of best error bounds for derivatives in two
point Birkhoff interpolation problems.
vii

Chapter Four presents the problems of existence,
uniqueness, explicit representation, and the problem of
convergence for fourth degree splines. Moreover we also
consider the problem of optimal pointwise error bounds for
functions f e c(S) [0,1). In Chapter Five our main object
is to sharpen the error bounds obtained earlier by Marsden
concerning quadratic spline interpolation. By doing so we
obtain in some special cases error bounds that are in fact
optimal.
viii
CHAPTER ONE INTRODUCTION
The purpose of this chapter is to provide a context
for the results derived in succeeding chapters. In order
to show some of the important achievements in
approximation by polynomials, we discuss briefly the
Lagrange and Hermite-Fejer interpolations, which match a
given function at any finite number of distinct points.
After exploring the question of computational stability of
a given interpolation, we discuss in some detail the
problem of best order of approximation by polynomials as
initiated by S. N. Bernstein [1912], D. Jackson [1930],
and A. Zygmund [1968].
In contrast to high order approximation by a single
polynomial, we next consider in great detail the problem
of approximating a given function f(x) defined on [a,b]
by the interpolatory piecewise polynomials known as
splines. Special attention is given to the problem of
approximating by piecewise cubic and piecewise parabolic
splines. The study of these splines motivates us to also
study two point Hermite and Birkhoff interpolations.
1
2
Lagrange and Hermite-Fejer Interpolation
Let X denote an infinite triangular matrix with all
entries in [-1, 1]
(1.1.1) X:
We denote by Ln[f,x;X] the Lagrange polynomial of
interpolation of degree~ n which coincides with f(x) in
the nodes xkn ( k = 0, 1, . • , n). Then
(1.1.2)
where
(1.1.3)
Ln [ f, x; X] =
=
n
n L f(xknl 1kn(x)
k=O
wn(x)
wn(x) = IT (x - xkn) • k=O
It is known from the results of G. Faber and S. N.
Bernstein that no matrix Xis effective for the whole
class C of functions continuous in [-1, 1). Bernstein
showed that for every X, there exists a function f 0 (x) and
a point x 0 in C[-1,1] such that
(1.1.4)
L. Fejer [1916) showed that if instead of Lagrange
interpolation, we consider the Hermite-Fejer interpolation
polynomials, the situation changes. The Hermite-Fejer
polynomials Hn+l[f,x,X] are of degree < 2n + 1 and are
uniquely determined by
3
(1.1.5)
where okn are arbitrary real numbers, k = 0, 1, .• n.
The explicit form of Hn+l[f,x;X] is given by
(1.1.6)
where
(1.1. 7)
and
(1.1.8)
Hn + l [ f , x ; X] =
= ( 1 - w n' ' ( xkn) ( x - xkn) } wn' (xkn)
- • v kn ( x) 1 kn 2 ( x)
n kn ( x) = ( x - xkn) 2 lkn (x) •
2 lkn (x)
kn(x)
Fej& brought out the importance of Hermite interpo
lation by introducing the concept of "strongly normal"
point systems. To each set of n + 1 distinct points x 0 ,
x 1 , .• , xn, Fejer associates a set of n + 1 points x 0 ,
x 1 , ,Xn which are the zeros of the linear functions
, Xn are said to be the
conjugate point system of x 0 , x 1 , , xn. A system of
points x 0 , x 1 , •• , xn is called strongly normal if the
conjugate point system lies inside [-1, 1]. For example,
the zeros of the Tchebycheff polynomial Tn(x) = cosne,
case= x form a strongly normal point system. Fejer
proved (using these ideas) that Hermite-Fej& interpola
tion polynomials based on strongly normal point systems
(and under certain conditions on okn) converge uniformly
to f(x) on [-1, 1].
4
Optimal Error Bounds for Two Point Hermite Interpolation
In order to motivate the present day work on error
bounds, we first consider the classic error bound of
Cauchy. Let us consider once more the interpolation
formula of Lagrange. Let f(x) e C[a,b] and consider the
Lagrange interpolation polynomial
Ln [ f ,x] =
Next we set
n I f(xkn) 1kn(x)
k=O
(1.2.1) e ( X) = f ( X) - Ln [ f 'X] •
In the case f(x) is itself a polynomial of degree
~ n, then it is easy to see from the uniqueness of the
Lagrange interpolation polynomial that e(x) = O. Thus it
is of interest to study what can be said about e(x) if
f(x) is a given smooth function other than a polynomial of
degree ~ n. The following theorem gives the most widely
known error bound.
Theorem 1.1 (Cauchy). Let f(x) e C[a,b] and suppose
that f(n) (x) exists at each point of [a,b]. Let Ln[f,x]
be the element of the class of polynomials of degree
< n - 1 that satisfies the equation
(1.2.2)
Then for any x in [a,b], the error
e ( X) = f ( X) - Ln [ f 'X]
has the value
( 1. 2 • 3 ) e ( x) = wn ( x) f ( n + 1 ) ( t_; ) / ( n + 1 ) ! ,
where t_; is a point of [a,b] that depends on x and
wn (x) =
5
n L (x-xin) •
i=O
An immediate consequence of (1.2.3) is the inequality
(1.2.4) I e ( x) I .S. I wn ( x) I I I f ( n + 1 ) I I / ( n + 1) !
where 11 11 denotes the supremurn norm on [a,b]. If we set
f(x) = wn(x), we see that (1.2.4) becomes an equality.
Thus the right hand side cannot be made smaller. We
therefore say that (1.2.4) is an optimal bound.
The Equations (1.2.3) and (1.2.4) have been
extensively studied. For instance, the study of
minimizing 11 wn 11 led to Tchebychev' s system of
orthogonal polynomials. For a good discussion of some of
the elementary analysis associated with this error bound,
see Powell [1981].
In contrast to the precise and beautiful pointwise
Cauchy bound, very little has been known about precise
polynomial derivative errors. Denoting e(x) as the Cauchy
remainder for Lagrange polynomial interpolation, we
consider the role played by the term f(n+l) (~i- If f e Pn
(the class of polynomials of degree~ n), the remainder
vanishes identically. For a fixed x, we may consider the
remainder
en ( X) = f ( X) - Ln [ f, X]
as a process which annihilates all elements of Pn. We
may now formulate the following theorem of Peano [1913].
6
Theorem 1.2 (Peano). Let L be a continuous linear
functional such that L(p) = 0 for
all f e
(1.2.4)
where
and
c(n+l) [a,b],
b L(f) = f
a
K(t) = (
(x - t)~
f(n+l) (t) K (t) dt
LX [ (X - t)~] } I
= (X - t)n
= 0
all
n!
P e Pn.
for x > t
for x < t
Then for
The notation Lx[(x-t)~] means that the functional L
is applied to (x - t)~ considered as a function of x.
For a detailed study of the Peano theorem we refer to P.
J. Davis [1975] and to A. Sard [1963]. We next turn to an
application of the Peano theorem to derive pointwise
optimal derivative error bounds.
Let u(x) e c( 4 ) [O, h] be given; let v 3 (x) be the
unique Hermite interpolation polynomial of degree< 3
satisfying
(1.2.5) v 3 (0) =u(O) ,
v 1
3 (0)=u'(O),
v 3 (h) ,
v' 3 (h) =u' (h) .
Ciarlet, Schultz and Varga [1967] obtained a
pointwise error bound for e(x)= v 3 (x) - u(x) and its
derivatives in terms of
U = maxO<x<hlu (4 ) (x) I
7
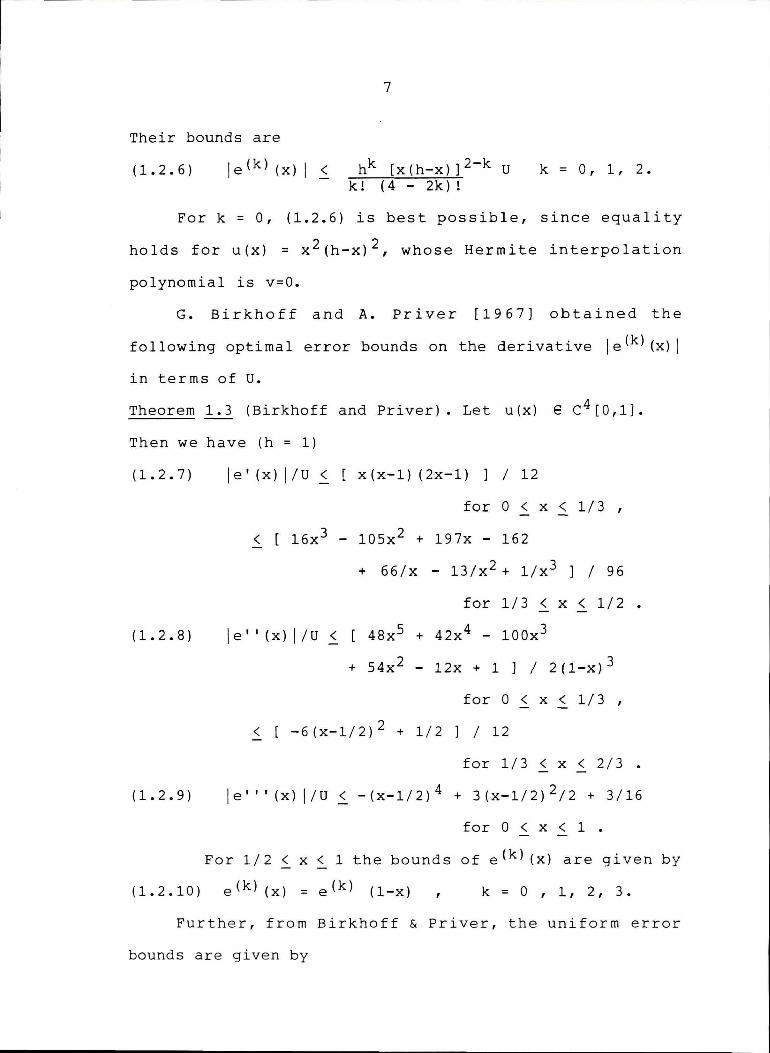
Their bounds are
(1.2.6) le(k) (x) I < hk [x(h-x)] 2-k U k ! ( 4 - 2k) !
k = 0, 1, 2.
Fork = 0, (1.2.6) is best possible, since equality
holds for u(x) = x 2 (h-x) 2 , whose Hermite interpolation
polynomial is v=O.
G. Birkhoff and A. Priver [1967] obtained the
following optimal error bounds on the derivative le(k) (x) I
in terms of U.
Theorem 1. 3 ( Birkhoff and Pri ver) . Let u (x) e c4 [ 0, 1].
Then we have (h = 1)
(1.2. 7)
(1.2.8)
(1.2.9)
le' (x) I/U .s_ x(x-1) (2x-1) ] / 12
for O < x < 1/3 ,
< [ 16x3 - 10Sx2 + 197x - 162
le' 1 (x) I/U <
+ 66/x - 13/x2 + l/x3 ] / 96
for 1/3 .s_ x < 1/2 .
48x 5 + 42x 4 - 100x3
+ 54x 2 - 12x + 1] / 2(1-x) 3
for O < x < 1/3 ,
< [ -6 ( x-1 / 2 l 2 + 1 / 2 J / 12
for 1/3 < x < 2/3 . - -
I e 1 ' ' ( x) I / U < - ( x-1 / 2) 4 + 3 ( x-1 / 2) 2 / 2 + 3 / 16
for O < x < 1 •
For 1/2 ~ x < 1 the bounds of e(k) (x) are given by
( 1. 2. 10) e ( k) ( x) = e ( k) ( 1-x) k = 0 , 1, 2, 3.
Further, from Birkhoff & Priver, the uniform error
bounds are given by

le (r) (x) < ar
(1.2.11)
8
u r = 1' 2'
ao = 1
4 2 4!
al = (/3)/216
a 2 = 1/12
a 3 = 1/2 •
3 '
The proof of the above theorem is based on the Peano
kernel theorem. It gives a general and highly useful
method for expressing the errors of approximations in
terms of derivatives of the underlying functions of the
approximation. For a computer routine which gives
polynomial error bounds by numerical quadrature of the
Peano kernel, see Howell and Diaa [1986]. Stroud [1974]
gives a readable account of some other applications.
Birkhoff Interpolation
We have just observed that in problems of Hermite
interpolation, function values and consecutive derivatives
are prescribed for given points. In 1906, G. D. Birkhoff
considered those interpolation problems in which the
consecutive derivative requirement can be dropped. This
more general kind of interpolation is now referred to as
the Birkhoff (or the lacunary) interpolation problem(s).
The Birkhoff interpolation problem differs from the
more familiar Lagrange and Hermite interpolation in both
its problems and its methods. For example, Lagrange and
Hermite interpolation problems are always uniquel y
9
solvable for every choice of nodes, but a given Birkhoff
interpolation may not give a unique solution.
More formally, given n + 1 integer pairs (i,k)
corresponding ton+ 1 real numbers ci,k' and m distinct
real numbers xi, i = 1, 2, , , m < n + 1, a given problem
of polynomial interpolation
equations
is to satisy the n + 1
(1.3.1) p (k) (X·) = Y· k n l l,
with a polynomial Pn of degree at most n. (We are using
the convention that Pn (O) (x) = Pn (x) .)
If for each i, the orders k of the derivatives in
(1.3.1) form an unbroken sequence k = O, 1, •• ,ki' then
the interpolation polynomial always exists, is unique, and
can be given by an explicit formula. If some of the
sequences are broken, we have Birkhoff interpolation. As
remarked by Professor Lorentz [1983], the two cases are as
different as, let us say, the theory of linear and
nonlinear differential equations.
Pairs (i,k) which appear in (1.3.1) are most easily
described by means of the interpolation or incidence
matrix E. If pn(k) (xi) is specified in (1.3.1), we put a
"l" in the i+lst column and kth row of E. If P (k)(X·) is n l
not specified in (1.3.1), then a "O" appears in the i+lst
column and kth row. Each of them rows of E has a non
zero entry. An incidence matrix E and a pointset X, which
lists the points x i, sp e cif y a Birkhoff interpolation
problem of the type of (1.3.1). For a given E and X, the

10
unique existence of an interpolation polynomial of degree
n + 1 is equivalent to the invertibility of the system of
equations given by (1.3.1), or equivalently to the inver
tibi li ty of a matrix V which we will refer to as a
generalized Vandermonde matrix V. For Lagrange
interpolation of the points xi, i = 1, 2, •• , n + 1,
the Vandermonde Vis given as
1 1 1
(1.3.2) V =
X n 1
Inversion of the Vandermonde gives the coefficients of the
fundamental functions lkn(x) of Lagrange interpolation.
As Lagrange interpolations are always unique, it follows
that Vandermonde matrices are invertible.
For a given system (1.3.1), it is not hard to
construct an analagous matrix to (1.3.2), which we will
refer to as the generalized Vandermonde. Just as
inverting the Vandermonde matrix gives the fundamental
functions of Lagrange interpolation, inverting the genera
lized Vandermonde gives a convenient form for representing
a Birkhoff interpolation. The Vandermonde and its
counterpart for Birkhoff interpolation are examples of
Gram matrices, of which a good account is to be found in
Davis [1975].
Though invertible, the Vandermonde matrices are known
to be extremely ill-conditioned for real-valued
11
interpolation. Many of the generalized Vandermonde
matrices associated with Birkhoff interpolation processes
are much better conditioned, illustrating an advantage of
Birkhoff interpolation over the more traditional Lagrange
interpolation. To make this point more explicit, we
define "condition" of a matrix.
For a given norm 11 11, and invertible matrix M, we
define the condition cond(M) of the matrix M by
(1.3.3) cond (M) = I IM I I I I M-111 .
If we rescale the Birkhoff interpolation problem
specified by E and X to the unit interval, we can define
the condition of an interpolation as the condition of the
associated generalized Vandermonde. In the L 2 norm for
eleven equally spaced points, the condition number of
Lagrangian interpolation is on the order of a million. On
the other hand, Lagrangian interpolation on eleven equally
spaced complex roots of unity has L2 condition number one,
as does the eleven term MacLaurin expansion.
Computationally speaking, the inverse of the
condition number of a matrix Mis the norm distance of M
from a singular matrix (See Golub and Van Loan [1983]).
For example, the Vandermonde for Lagrange interpolation of
eleven points on the unit interval is thus seen to be a
norm distance of only one-millionth from being singular.
Not only is the ill-conditionedness of the Vandermonde
troublesome in determining the coefficients of the
fundamental functions, but it also causes problems of
12
round-off error in evaluating a polynomial by use of the
fundamental functions. For these reasons, it is very much
preferable to use a well-conditioned interpolation.
The MacLaurin expansion, having diagonal generalized
Vandermonde, is as well-conditioned as is possible.
Another particularly well-conditioned interpolation is the
Lidstone interpolation.
A Lidstone polynomial is a truncation of a Lidstone
series. In turn, a Lidstone series is a generalization of
a Taylor series which approximates a given function in the
neighborhood of two points instead of one. Such series
have been studied by G. J. Lidstone [1930], by Widder
[1942], by Whittaker [1934] and by others.
precisely, the series has the form
More
(1.3.3) f(x) = f(l)J\o(x) + f(0) J\ o(l-x) + f'' (l)J\1(X) +
f' ' ( 0) A 1 ( 1-x) + •
where J\n(x) is a polynomial of degree 2n + 1 defined by
the relations
J\ n(x) = x
(1.3.4) J\ n'' (x) = J\ n-1 (x)
J\n(0) = J\n(l) = 0, n = 1, 2, •..
Thus it is clear that the sum of an even number of
terms of the series (1.3.3) is a polynomial which coin-
cides with f(x) at x = 0 and at x = 1. Moreover, each
even derivative of the polynomial coincides with the
corresponding derivative of f(x} at those points.

13
Polynomial Approximation
Weierstrass first enunciated the theorem that an
arbitrary continuous function can be approximately
represented by a polynomial with any degree of accuracy.
We may express this theorem in the following form.
If f(x) is a given function, continuous for
a< x < b, and if E is a given positive quantity, it
is always possible to define a polynomial P(x) such that
(1.4.1) lf(x) - P(x) I < E
for all a< x < b.
It is readily seen that the number of terms required
to yield a specified degree of approximation, or under the
converse aspect, the degree of approximation attainable
with a specified number of terms, is related to the
properties of continuity of f(x). Naturally this has led
to many interesting developments in the theory of degree
of approximation of continuous functions by polynomials to
which we turn to describe.
A first important step in building this theory was
made by D. Jackson [1930]. Let f e C[-1,1]. Suppose that
we define the best approximation off by polynomials of
degree n by
(1.4.2)
where Pn ranges over all algebraic polynomials of degree n
and I lfl I = max lf(x) I, a~ x < b. Jackson considered the
problem of estimating En (f). To describe his results we
need the following definition.
14
Definition 1.1 If f e C [a,b], then the modulus of
continuity of f is a function (f,h) such that
(1.4.3) (f,h) = suplx-y!~h; x,y e [a,b] If (x) - f(y) I .
Now Jackson's theorems may be easily stated.
Theorem 1.4 (Jackson). Let f be continuous on [-1,1].
There is a positive constant A such that
(1.4.4) En ( f) ~ A w ( f , 1 / n) , n = 1 , 2 ,
where A is independent off.
An important corollary of Theorem 1.3 deserves to be
m en t i one d • Le t Li pa [ _ 1 , 1 ] ( M ) ( or s i m p 1 y L i p a ) be the
class of functions fin C[-1,1] such that
! f ( x) - f ( y) I < M I x-y I a
for all x and yin [-1,1]. It is easy to see that
f e Lipa [-l,l] (M) if and only if
w(f,h) < a M h for all h > 0 •
We then have the fol lowing consequence of Jackson's
theorem.
Corollary 1.5 Let O < a < 1.
some constant M, then
If f e Lipa [-l,l] (M), for
(1.4.5) for n = 1, 2, .•• na
for some positive constant A.
A. F. Tirnan [1951] noticed the following
strengthening of Jackson's theorem.
Theorem 1.6 (Tirnan). There is a positive constant C such
that if f e C[-1,1] and n is a natural number, then there
15
is a polynomial Pn of degree n such that
(1.4.6) lf( x ) - Pn(x) I .s_ A[ w(f, / 1 - x 2 ) + w (f,1/n 2 ) ]
n
for all x in the interval [-1,1].
In this result, in contrast to the theorem of
Jackson, the position of the point x in the interval
[-1,1] is taken into consideration and it is apparent that
for the polynomial Pn(x) thus constructed, as lxl -> 1,
the deviation lf(x) - Pn(x) I 2 is of magnitude w (f,1/n ).
Following the important theorem of Timan, V. K.
Dzjadyk [1956] proved the converse of Jackson's theorem.
Theorem 1.7 (V. K. Dzjadyk). Let f e C[-1,1]. Suppose
that O < a < 1. Then there is a constant B such that to
each n there corresponds a polynomial Pn of degree n such
that
(1.4. 7) lf(x) - Pn(x) I .s_ B- ( ( l l x 2 ) a +
n
a 1 ) } ~2
if and only if w (f,h) .s_ Cha for some constant C.
From Jackson's theorem we noticed that if f e Lipa ,
then
En(f) .s_ AM, n = 1, 2 ••• na
where A is an absolute constant. To achieve a more rapid
decrease to O of En(f), it is necessary to assume more
smoothness for f, for example, that f has several
continuous derivatives. Let cr[-1,1] , r = O, 1 .•.
denote the subset of C[-1,1] consisting of those functions

16
which possess r continuous derivatives on [-1,1]. For
this class of functions, Dunham Jackson proved also the
following direct theorem.
Theorem 1.8 (D. Jackson). If f e c(r) [-1,1], then
( 1. 4. 8) En ( f) ~ Ar ( 1 / n) r w ( f ( r) , 1 / n) , n = l, 2, • • •
For many important contributions we refer to the work
of G. G. Lorentz [1983].
Spline Approximation
One uses polynomials for approximation because they
can be evaluated, differentiated and integrated easily and
in finitely many steps using just the basic arithmetic
operations of addition, subtraction and multiplication.
But there are limitations of polynomial approximations.
For example, the polynomial interpolant is very sensitive
to the choice of interpolation points. If the function to
be approximated is badly behaved anywhere in the interval
of approximation, then the approximation is poor every
where.
This global dependence on local properties can be
avoided when using piecewise polynomial approximation.
Concerning piecewise polynomial approximation, Professor
I. J. Schoenberg remarked that "polynomials are wonderful
even after they are cut into pieces, but the cutting must
be done with care. One way of doing the cutting leads to
the so-called spline functions" (Schoenberg [1946],
p. 46).
17
Splines were introduced by Prof. Schoenberg in 1946
as a tool for the approximation of functions. They tend
to be smoother than polynomials and to provide better
approximation of low order der i va ti ves. Though we wi 11
later use the word s p 1 ine in a somewhat broader con text,
we first give the more traditional definition.
Let
(1.5.1)
be a sequence of strictly increasing real numbers called
the knots of the spline function. We may say sm(x) is a
spline function of degree m having the knots
x 1 , x 2 , .. , xk
if it satisfies
a) s (x) e cm-l (-oo ,oo) ; m
b) In each interval (xi, xi+l), including (-00 ,x 1 )
and (xk,00), the restriction of sm (x) to (xi, xi+l) is a
polynomial of degree at most m. Thus, a step function
s 0 (x) may be regarded as a spline function of degree 0,
while a spline function of degree 1 is a polygon (broken
line function) with possible corners at some or all of
the possible corners at some or all of the points (1.5.1).
Similarly, s 2 (x) has a graph composed of a sequence of
parabolas which join at the knots continuously together
with their slopes. Both for a smoother approximation and
for a more efficient approximation, one has to go to
piecewise pol y nomial approximation with higher order
pieces. The most popular choice continues to be a

18
piecewise cubic approximating function. Various kinds of
cubic splines are in use in numerical analysis. The ones
most commonly used are complete cubic splines, periodic
cubic splines and natural cubic splines.
A spline function of degree m with k knots is repre
sented by a different polynomial in each of the k+l
intervals into which the k knots divide the real line. As
each polynomial involves m + 1 parameters, the spline
function involves a total of (m+l) (k+l) parameters.
However, the continuity conditions stated ear 1 ier impose
certain constraints on those parameters. At each knot,
the two adjoining polynomial arcs must have equal
ordinates and equal derivatives of order 1, 2, ••• ,
m - 1. Thus, rn constraints are imposed. It is easy to
see that every spline function s(x) of degree rn with the
knots x 1 , x 2 , •• , xk has a unique representation in the
form
(1.5.1) k
s(x) = Pm(x) + L CJ· (x - XJ·)! j=l
where Prn(x) denotes a polynomial of degree m and
(1.5.2)
Also
(1.5.3)
x m = xrn +
= 0
X ) 0
X < 0
C · = (1/(rn) !) [ s(rn) (x •+) - s(rn) (x--) } • J J J
The class of "natural" spline functions was intro
duced by Prof. Schoenberg [1946]. A spline function s(x)
19
of odd degree 2p-l with knots x 1 , x 2 , .. , xk is called
a natural spline function if the two polynomials by which
it is represented in the two end intervals (- ,x 1 ) and
(xk,+ ) are of degree p-1 or less. It is easy to express
the natural spline functions by
(1.5.4)
where
s(x)
k
k = Pp-1 (xl + I
j=l C- (X-X·) 2P-l
J J +
I cj xjr = O, r = p, p+l, •• , 2p-l. j=l
The following theorem states an important interpola
tion property of natural spline functions.
Theorem 1.9 Let (xi, yi), i= 1, 2, •• , k, be given
data points, where the X · 1
S 1 form a strictly increasing
sequence, and let p be a positive integer not exceeding n.
Then there is a unique natural spline function s(x) of
degree 2p - 1 with the knots xi such that
(1.5.5) s(xi) = Yi , i = 1, 2, ... , k.
Natural spline functions possess certain impressive
optimal properties and can be shown to be the "best"
approximating functions in a certain sense. This is the
content of the next theorem.
Theorem 1.10 Let P(x) be the unique natural spline
function that interpolates the data points (xi,Yi),
i = 1, 2, .• , k, in accordance with Theorem 1. 7. Let
f(x) be any function of the class c(P) that satisfies the
conditions
20
(1.5.6) f(X·) =y., l l
i = 1, 2, •• , k.
Let (a,b) be a finite interval containing all the knots
xi. Then
(1.5. 7) b
f [ f ( p ) ( X ) ] 2 dx > b
f [ s ( p ) ( x ) ] 2 dx a a
with equality only if f(x) = s(x).
The effectiveness of the spline approximation can be
explained to a considerable extent by its striking conver-
gence properties. Interesting contributions were made by
J. N. Ahlberg and E. N. Nilson [1964], C. DeBoor and G.
Birkhoff [1964], A. Sharma and A. Meir [1967], M. J.
Marsden [1972], T. R. Lucas [1974], E. w. Cheney and F.
Schurer [1968], C. A. Hall [1968], C. A. Hall and w. w.
Meyer [1976], and A. K. E. Atkinson [1968]. As a good
reference on splines which offers a good comparison of the
approximating properties of polynomials and splines, we
recommend A Practical Guide to Splines by C. DeBoor
[1978].
First we discusss error analysis for the class of
functions f(x) e c( 2) with period one. Let
(1.5.8) = 1
be a division of [0,1] of mesh gauge
(1.5.9)
where
I 21
A periodic cubic spline function Yn (x) is . a function
composed of a cubic polynomial in each of the intervals of
(xiJt=o with the requirement that
Yn(x) e c( 2 ) (0,1]
and
i = o, 1, 2.
It was observed by Walsh, Ahlberg and Nilson [1962] that
there exists a unique periodic spline function Yn(x) which
interpolates f(x) at the points xn,l· It was shown that
Yn(x) and y'n(x) converge uniformly to f(x) and f'(x)
respectively as hn -> 0. Later Ahlberg and Nilson [1966]
studied the more delicate question of the convergence of
y"n(x) to f"(x). Writing
(1.5.10) ;\ . = n,1 hn, i + 1 / ( hn, i + hn, i + 1) '
i = 1, 2,
and
An= maxo~i~k l '- n,i - l/ 2 I ' where form= kn, " n,m+l is taken as
(hn,l + hn,m)/hn,l '
they show that
y'' (x) -> f''(x) n
uniformly provided that
hn -> 0 and An-> 0.
After this result, I. J. Schoenberg [1964a] raised the
question that it would be very interesting to find out to
what extent the condition An-> 0 is really necessary in
the above mentioned theorem. The above theorem together

22
with toe open problem of Schoenberg lead to important
contributions by Birkhoff and DeBoor [1964], and Meir and
Sharma [1969] which we turn to describe.
In 1964, Garrett Birkhoff and Carl DeBoor made the
following contribution. Let f(x) e C'[0,1] and let
(1.5.11) [X }k o = xo < x1 < i i=O'
be a partition. The function f(x) is now interpolated by
a cubic spline function s(x) (called a complete cubic
interpolation spline function) which means that s(x) is a
cubic polynomial when restricted to each interval
(xi,xi+l), and s (x) e c( 2 ) [0,1].
uniquely defined by the conditions
Moreover s (x) is
(1.5.13) f(xi) = s(xi)
f'(0) = s'(0),
f' (1) = s' (1)
i = 0, 1, •• , k
This first important result concerning the error analysis
yielded the following theorem.
Theorem 1.11 Let f(x) e c( 4) [0,1].
e(r) = f(r)_ s(r)
Denote
There are constants cr(m), r = 0, 1, 2, 3, depending
only on m > 0, such that
(1.5.13)
provided that
h . = l
m I
r = 0, 1, 2, 3,
23
h = max hi ,
and 11 I I denotes the supremum norm.
The authors go a step further and prove a convergence
theorem related to f e c( 3) [0,1].
Theorem 1.12 Let f"' (x) be absolutely continuous on
[0,1]. Let (xiJ1= 0 ,n (where k depends on n) be a sequence
of partitions of [0,1] such that hn = maxihi,n ->Oas
n -> Let mh,n <mas n -> Let en(x) be the error
incurred when f(x) is interpolated by a spline function on
Then
le'''nl -> 0
uniformly on (0,1] as n -> 00
The next important development came with some
interesting results by Prof. A. Sharma and A. Meir (1967]
concerning degree of approximation of spline interpola
tion. This paper does away with some annoying assumptions
under which uniform convergence of the interpolating cubic
spline and its derivatives was proven earlier (see above
for these restrictions).
Theorem 1.13 Let f(x) be continuous and periodic with
period unity. Let
(1.5.15)
where
qn = max• • l.' J
Let sn(x) be the cubic spline of period unity with
joints (or knots) xn,i' i = O, 1, .. , n in [0,1], such
24
that sn(x) interpolates f(x) at the joints. Let
I lg! I = maxxlg(x) I forge C[0,1] ,
and
w ( g , h) = max ( I g ( u ) - g ( v ) I
The authors prove
!u-v ! < h }, h > 0 •
i)
( 1. 5 .16) I If - sn I I _s_ ( 1 + qn 2 ) w ( f, hn) ;
ii) if f e c(l), then
(1.5.17)
iii)
(1.5.18)
iv)
(1.5.19)
where
or
with
I If (r>
if f e
I It ( r >
if f e
I If (rl
P = max . n l
satisfying
- s(r)nl I
C ( 2) , then
- s(r)nll
C ( 3) , then
- s(r)nl I
< 76 hn 1-r w (f' ,hn)
r
< 5 hn 2-r w (f",hn) - ,
r =
< C hn 3-r (f"' h ) - w , n
r = 0,
for j = i-1, i+l
,
= 0 , 1
0 , 1, 2
,
1, 2, 3
From these results one can draw the obvious conclu
sions regarding uniform convergence of the interpolating
25
splines and derivatives. The arguments are surprisingly
simple. The uniform convergence Of S II n to f'', which
follows from iii), had been proved earlier by Ahlberg and
Nilson (see above) under the additional assumptions that
the mesh become eventually uniform, i.e.,
(1.5.20)
Parabolic Spline Interpolation
Many interesting results were obtained by M. Marsden
(1974] concerning the approximation of functions by even
degree splines. Of particular interest are the simple
parabolic splines. If break points are the same as the
interpolated points, then the resulting spline is ill
behaved, as can be seen by simple examples (DeBoor
[1978]). On the other hand, if we take the interpolated
points midway between break points, the parabolic splines
are very well-behaved. In fact in the first theorem given
below, a good approximation to a continuous function is
assured with no conditions on the partition other than the
length of the largest subinterval being small.
We first give some necessary notation. Let
(1.6.1)
be a fixed partition of [0,1]. Set
(1.6.2) h- = X• - xi-1 ' h = max -h , l l l. l
z . = (X· + xi-1)/2 ' l l.
ho = hn , a- = hi+l/(hi + hi+l) ' l
C· + a - = 1 ' f o r i = 1, 2 , . . n.
l l

26
Let
ye C[0,1] , y(0) = y(l) ,
I I YI I = sup ( I Y (x) I : 0 < x < 1 }
such that y is extended periodically with period 1.
A function s(x) is defined to be a periodic quadratic
spline interpolant associated with y and (xi}r=O if
(1.6.3) a) s(x) is a quadratic expression on each
b) s(x) e C' [0,1] ,
c) s(O) = s(l) , s' (0) = s' (1)
d) s(zi) = y(zi) , i = 1, 2, . , n.
The following theorems were obtained by Marsden.
Theorem 1.14 (Marsden). Let (xiJ1=o be a partition of
[0,1], y(x) be a continuous 1- periodic function and s(x)
be the periodic quadratic spline interpolant associated
with y and (xi}~=O·
Then
(1.6.4)
(where
llsill < 2 IIYII, lleill < 2w(y,h/2),
I lei I ~ 3 w(y,h/2) •
11s11 < 2 IIYII,
S· = s(x-) and e- = y(x-) - s(x-) ). l l l l l
The constant 2 which appears in the first of the above
equations can not, in general, be decreased.
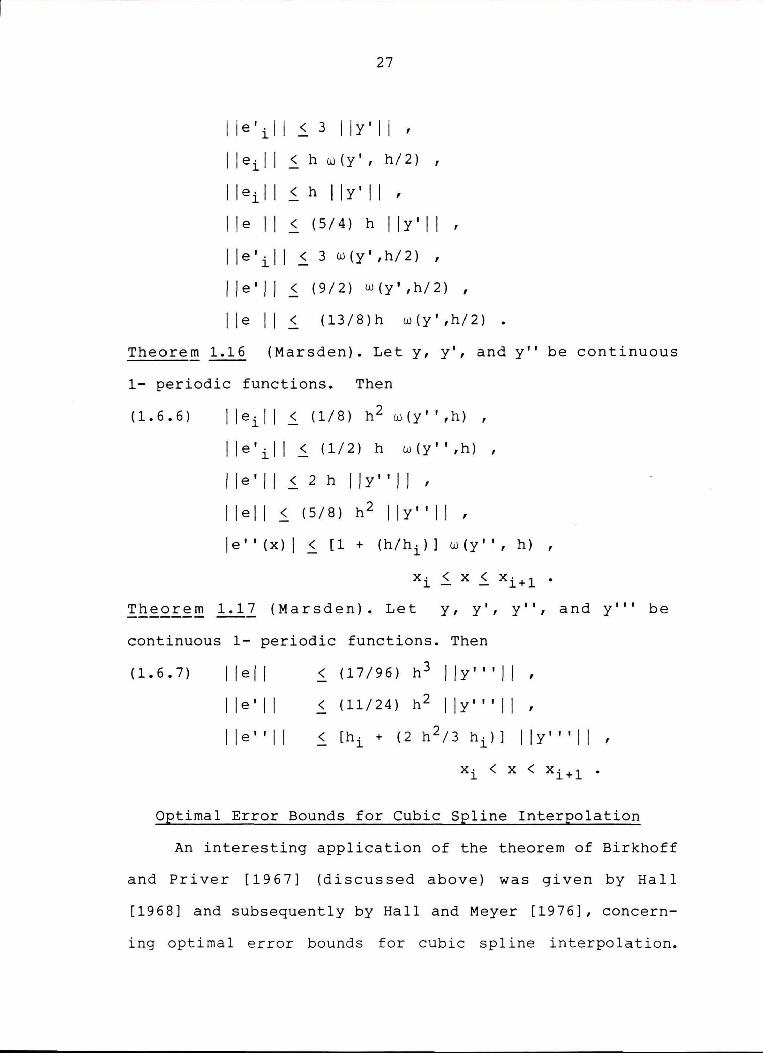
Theorem 1.15 (Marsden). Let y and y' be continuous 1-
periodic functions. Then
(1.6.5) ll s'ill ~ 2IIY'II,
27
lle'ill .s. 3 IIY'II,
lleill < h w{y', h/2),
lleill < h IIY'II,
lie II< {5/4) h IIY'II,
I le'il I _s_ 3 w{y' ,h/2) ,
lle'II < {9/2) w{y',h/2),
I le 11 < {13/8)h w {y' ,h/2) •
Theorem 1.16 {Marsden). Let y, y', and y'' be continuous
1- periodic functions. Then
(1.6.6) I ieil I .S. (1/8) h 2 w {y' ',h) ,
I le'il I .S. {1/2) h w {y' ',h) ,
lle'II .S. 2 h IIY" l l,
!lei I .S. (5/8) h 2 I IY" II , le'' {x) I _s_ [1 + (h/hi)] w (y'', h) ,
xi .S. x .S. xi+l.
Theorem 1.17 (Marsden). Let y, y', y", and y"' be
continuous 1- periodic functions. Then
(1.6.7) I le I I < (17/96) h3 IIY"'ll ,
I I e' II < (11/24) h2 IIY"'II ,
lle"II < [h • + l
(2 h 2 /3 hi)] IIY'"II ,
Xi< X < Xi+l •
Optimal Error Bounds for Cubic Spline Interpolation
An interesting application of the theorem of Birkhoff
and Priver [1967] (discussed above) was given by Hall
[1968] and subsequently by Hall and Meyer [1976], concern
ing optimal error bounds for cubic spline interpolation.
28
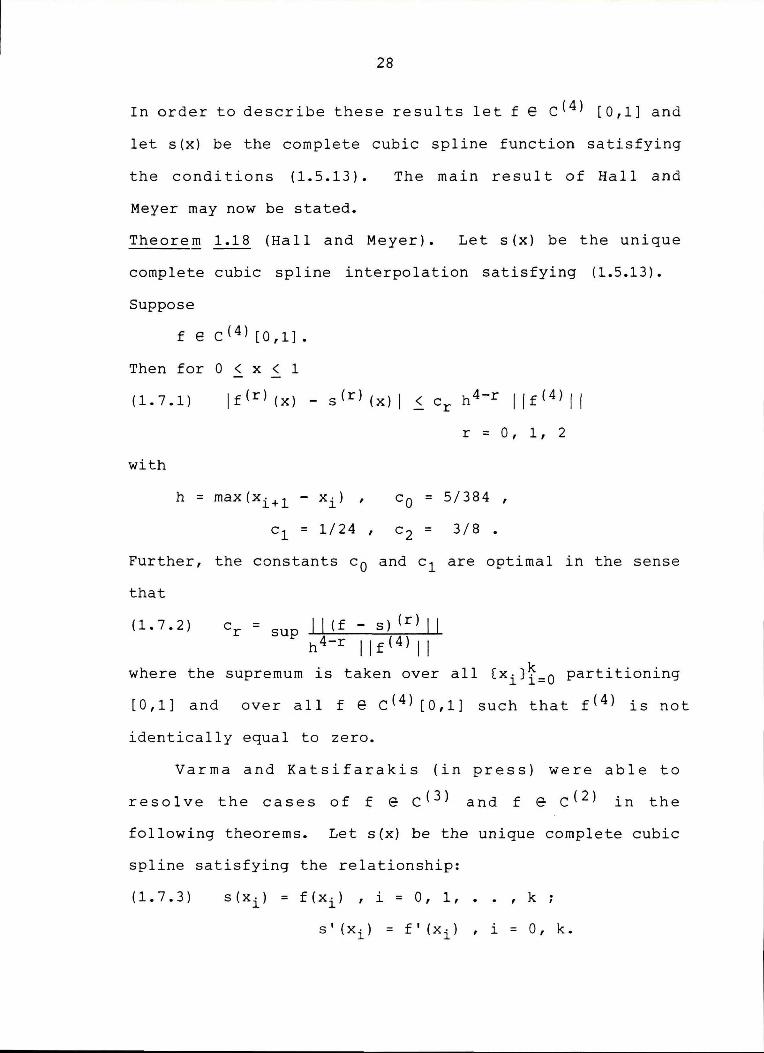
In order to describe these results let f e c( 4 ) [0,1] and
let s(x) be the complete cubic spline function satisfying
the conditions (1.5.13).
Meyer may now be stated.
The main result of Hall and
Theorem 1.18 (Hall and Meyer). Let s(x) be the unique
complete cubic spline interpolation satisfying (1.5.13).
Suppose
f e c( 4 l [0,11.
Then for O < x < 1
(1.7.1) Jf(r) (x) - s(r) (x) I < cr h 4-r I jf( 4 ) 11
r = 0, 1, 2
with
CO= 5/384 ,
c 1 = 1/24 , c 2 = 3/8 .
Further, the constants c 0 and c 1 are optimal in the sense
that
(1. 7 .2) cr = sup I I ( f - s l ( r) I I h 4-r JJf( 4 lJJ
where the supremum is taken over all (xi}1=o partitioning
[0,1] and over all f e c( 4 ) [0,1] such that f( 4 ) is not
identically equal to zero.
Varma and Katsifarakis (in press) were able to
resolve the cases of f e c( 3 ) and f e c( 2 ) in the
following theorems. Let s(x) be the unique complete cubic
spline satisfying the relationship:
(1.7.3)
s'(x•) = f'( x• ) l l
i = 0, k.
29
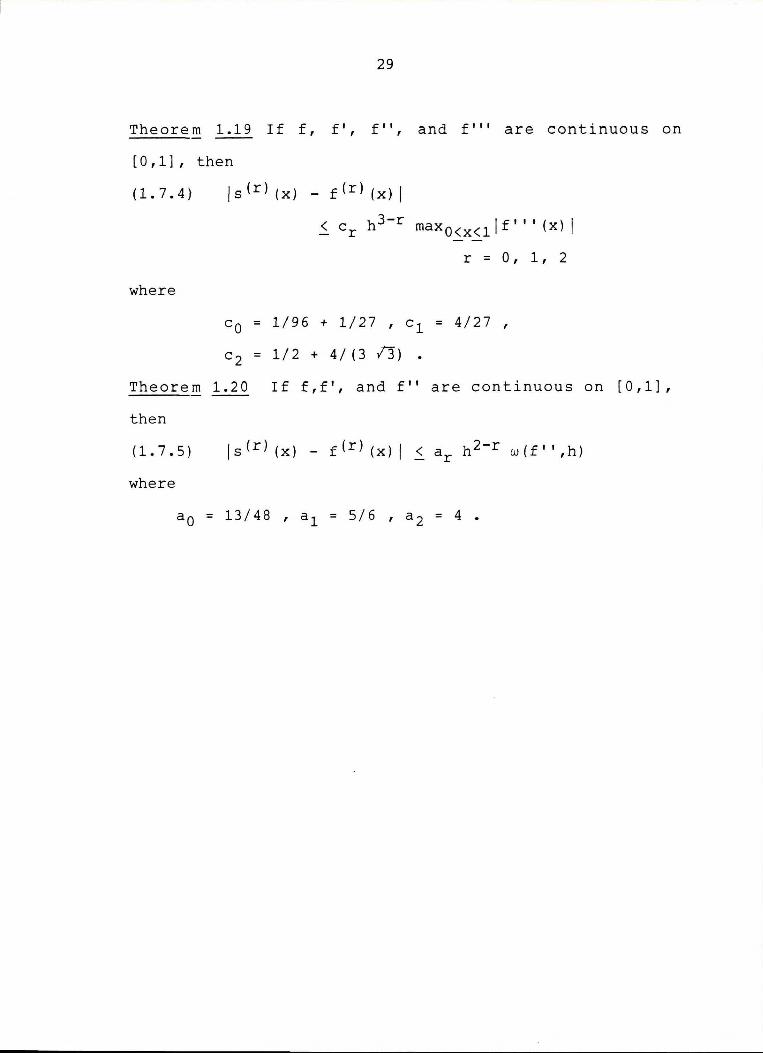
Theorem 1.19 If £, £', £", and £"' are continuous on
[ O, 1 l , then
(1.7.4) /s(r) (x) - f(r) (x) I
where
< cr h 3-r maxO<x<llf''' (x) I r = O, 1, 2
c 0 = 1/96 + 1/27 , c 1 = 4/27,
C2 = 1/2 + 4/(3 /3).
Theorem 1.20 If f,f', and f" are continuous on (0,1],
then
(1.7.5) [s(r} (x) - f(r} (x} I < ar h 2-r w(f' ',h)
where
a 0 = 13/48 , a 1 = 5/6 , a 2 = 4 •
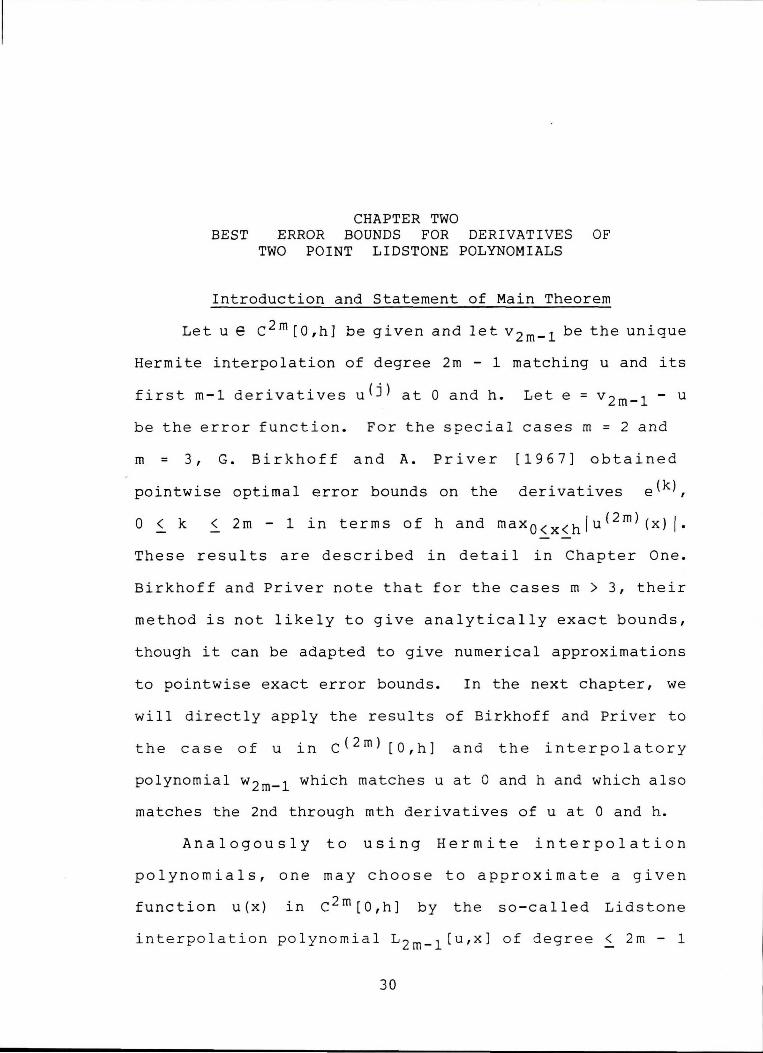
CHAPTER TWO BEST ERROR BOUNDS FOR DERIVATIVES OF
TWO POINT LIDSTONE POLYNOMIALS
Introduction and Statement of Main Theorem
Let u e c 2 m [0,h] be given and let v 2 m-l be the unique
Hermite interpolation of degree 2m - 1 matching u and its
first m-1 derivatives u(j) at 0 and h. Let e = v 2 m-l - u
be the error function. For the special cases m = 2 and
m = 3, G. Birkhoff and A. Priver [1967] obtained
pointwise optimal error bounds on the derivatives e(k),
0 < k < 2m - 1 in terms of h and maxO<x<h I u (2 m) (x) j.
These results are described in detail in Chapter One.
Birkhoff and Priver note that for the cases m > 3, their
method is not likely to give analytically exact bounds,
though it can be adapted to give numerical approximations
to pointwise exact error bounds. In the next chapter, we
will directly apply the results of Birkhoff and Priver to
the case of u in c( 2 m) [0,h] and the interpolatory
polynomial w2rn-l which matches u at 0 and hand which also
matches the 2nd through mth derivatives of u at 0 and h.
Analogously to using Hermite interpolation
polynomials, one may choose to approximate a given
function u(x) in c 2 m[0,h] by the so-called Lidstone
interpolation polynomial L 2 m_ 1 [u,x] of degree< 2m - 1
30

31
matching u and its first m - 1 derivatives u( 2 j) at 0 and
h. Thus L 2m_ 1 [u,x] satisfies the following conditions
(where we assume h = 1):
(2.1.1) L ( 2 P)[u 0] =u( 2 P)(O), 2m-1 '
L ( 2P) [u 1] = u ( 2P) (1) 2m-l '
p = o, 1, , m - 1.
The explicit formula for L2m_ 1 [u,x] is
(2.1.2)
where
(2.1.3)
and
(2.1.4)
m-1 I u (2i) (1)
i=0 L2m-l[u,x] = . ( X)
l
m-1 + L u(2i) (0) i(l-x)
i=0
2· ..L.=, B2i+l(l+x) (2i+l) ! 2
, for i > 1
Here Bn(x) denotes the Bernoulli polynomial
(2.1.5)
and where the constant B· is given by J
(2.1.6) B. = J
That (2.1.2) in fact satisfies (2.1.1) follows from
the facts
1d 2 Pl (0l = 0 p = 0, l
1, . . , i ;
(2.1.7) id 2P) (1) = 0 p = 0, 1 , . . , i - 1 ; l
APi) (1) = 1 l
The main object of this chapter is to obtain
pointwise optimal error bounds for
32
e(j) (x) =f (j) (x) - L 2 m-ij) [f,x]
in terms of U = maxO<x<llu( 2 m) (x) 1- Here L 2 m-ij) [f,x]
denotes the jth derivat~ve of the Lidstone polynomial
defined by (2.2.2). An important role in Theorem 2.1 (see
below) is played by the Euler polynomial o2 m(x) of degree
2m given by the formula
(2.1.8)
where
(2.1.9)
and
02m (x) =
o0 (xl = 1
1 G 1 ( x, t) Q 2 m- 2 ( t) d t , m = 1 , 2 , • .
0
(2.1.10) G1 (x,t) = t (x - 1) 0 ( t ( X ( 1
= X (t - 1) , 0 ( X ( t ( 1 .
We may now state the main theorem as follows.
Theorem 2.1. Let u(x) e c 2 m [0,1] and let L 2 m-l [u,xJ =
L 2 m_ 1 (x) be the unique polynomial of degree~ 2m - 1
satisfying the conditions (2.1.1). Then, for O < x < 1,
with
u = max O < x < 1 I u ( 2 m) ( x) I ,
(2.1.11) lu( 2 j) (x) - L 2 m_{ 2 j) (x) I < U 0 2 m-2j (x) ,
and for j = 1, 2, •. , m
j = 0,1, •• , m - 1
< u o2m_ 2 j (1/2) ,
j = O, 1, •• , m -1
(2.1.12) I u ( 2 j -1) ( x) - L 2 m-12 j -1) ( x) I
33
< u ( (l-2x) Q2m+2-2j' (x)
+ 2Q2m+2-2j(x)}
< u I02m+2-2j'(O)I
where for a given integer k , Q 2 k(x) is the well known
Euler polynomial defined by (2.1.7). Moreover, (2.1.11)
and (2.1.12) are both best possible in the sense that
there exists a function u(x) e c2m[0,1] such that (2.1.11)
and (2.1.12) become equality for every x e [0,1].
From (2.2.11) and (2.1.12) follow immediately the
also exact bounds
(2.1.13) I lu( 2 j) - L2m-i 2 j) 11 < 02m-2j( 1 / 2 ) I lu( 2m) 11 ,
j = 0, 1, .• , m - 1
and
(2.1.14) I I u ( 2 j- l) - L 2 m- i 2 j- l) I I
< I02m+2-2j' (0) I I lu ( 2m) 11 ,
j = 1, 2, . . ' m - 1
where I I 11 denotes the supremum norm on [ 0, 1] •
Preliminaries
It is well known that the Bernoulli polynomials
defined by (2.1.5) satisfy
(2.2.1)
and
(2.2.2) Bn (1-x) = (-1) n Bn (x) •
In particular it follows that
(2.2.3) B 2n+l (1/2) = 0 •
34
From ( 2. 2 .1) , ( 2. 2. 3) and ( 2 .1. 3) - ( 2 .1. 6) , we obtain
(2.2.4) J\i" (x) = J\i-1 (x) ' J\i (0) = O ' J\i (1) = 0 '
i > 1 .
The proof of Theorem 2.1 depends on repeated use of
the kernel G1 (x,t) defined by (2.1.10). Let us consider
1 (2.2.5) g(x) = f G1 (x,t) r(t)dt
0 X 1
= J (x-l)t r(t)dt + J (t-l)x r(t)dt . 0 X
On differentiating, we have
X g I (X) = J t r(t)dt + (x-l)x r(x)
0 1
J (t-1) r(t)dt - x(x-1) r(x) X
X 1 = f t r(t)dt + J (t-1) r(t)dt .
0 X
Differentiating once more with respect to x we obtain
(2.2.6) g' ' ( x) = x r ( x) - ( x-1) r ( x) = r ( x) .
Also
(2.2. 7) g(O) = g(l) = 0 .
Let r ( t) = J\m_ 1 (t) in (2.2.5). From the above
discussion it follows that
satisfies
(2.2.8)
1 g(x) = f G1 (x,t) J\m_ 1 (t)dt
0
g' ' ( x) = A m-l ( x) , g ( O) = g ( 1) = O
From (2.2.4) we also know that for i > 1
J\ i'' (x) = Ai-1 (x) , J\, (0) = 0, l
35
Therefore
1 (2.2.9) g ( x) = Am ( x) = f G1 (x,t) Am_ 1 (t)dt ..
0
From (2.1.9) it follows that
(2.1.10) G1 (x,t) < 0 •
Also A0 (t) = t > 0 , 0 < t < 1 •
obtain from (2.2.9) that
(2.2.11)
Therefore we
On using (2.2.9), (2.2.10), and (2.2.11), we can assert
that
(2.2.12) A2(X) ~ 0 , 0 < x < 1 .
Inductively, it follows that 11.rn(x) ~ 0 for O < x < 1
provided rn is an even positive integer and 11.m(x) i O ,
0 < x < 1 if mis an odd positive integer. This property
of 11.m(x) will be needed many times in the proof of the
theorem.
The following iteratively defined kernels comprise
the essential machinery of the proof. Define
(2.2.13) G2 (x,t) =
and inductively
(2.2.14) Gn(x.t) =
1 f G1(x,y) G1 (y,t)dt 0
1 f G1 (x,y) Gn_ 1 (y,t)dy n = 2, 3, •. 0
From (2.2.10) and (2.2.13) it follows that
(2.2.15) G2 (x,t) ~ 0, G3 (x,t) < 0
0 < X < 1, 0 < t < 1 .

36
In general
(2.2.16) (-l)nGn(x,t) > 0
0 ( X ( 1, 0 ( t ( 1 .
Finally, let us define
(2.2.17) h(x) = 1
f Gn(x,t) q(t)dt. 0
We note again that h(x) uniquely satisfies
h (2n) (x) = q (x)
h (2k) (0) = h (2k) (1) (2.2.18)
= 0 ' k = O, 1, . • I n-1 .
We also need some of the known properties of Euler
polynomials introduced in (2.1.7) and (2.1.8). We can
easily verify that
(2.1.19) 02~• (x) = Q2n-2(x)
o2n(O) = o2n(l) = O.
Furthermore,
02J2p) (0) = Q (2p) (1) 2n = 0 I p
(2.2.20) Q (2n) (l) 2n = Q (2n) (O)
2n = (-l)n
Q (2j) (x) 2n = (-1) j O2n-2j (x)
Using (2.2.13) we note that
1 f G1 (x,t) dt , 0
1 f G1 (x,t) Q 2 (t) dt 0
1 1
= 0 ' 1, . .
= f G1 (x,t) [ 0
f G1(t,y) dy] dt 0
, n-1,

37
and in general,
(2.2.21) Q2m(x) = (-l)m
Explicitly some of the first Euler polynomials are
given by
= x(l-x) 2 !
o4 (x) = x 2 ( 1-x) 2 +x ( 1-x) , 4 !
= x 3 (1-x) 3 +3x 2 (1-x) 2 +3x(l-x) 6 !
Proof of Theorem 2.1
Let P 2 rn-l denote the class of polynomials of degree
< 2m-1. Following the notation used by Birkhoff and
Priver [1967] we shall denote
(2.3.1) Gm ( i ' j ) ( X, t) = c) i + j Gm ( x, t)
Since L 2 m_ 1 [u,x] = u(x) for u(x) e P 2 m-l it follows
from the Peano theorem that for u e c2m[0,1]
(2.3.2) e(x) =: u(x) - L2m_ 1 [u,x]
1 = f Gm(x,t) u ( 2m) (t) dt
0
where Gm (x,t) is the Peano kernel defined by (2.1.10) and
(2.2.14). Differentiating (2.3.2) we have
(2.3.3) = u( 2 j) (x)- L ( 2 j) [u x] 2 m-1 '
1 . = f Gm( 2 J,O)(x,t) u( 2 m)(t) dt.
0
Let us substitute u (x) = Q 2 m (x) (as defined by
(2.1.7)) in (2.3.3) and use various properties as given by
38
(2.2.20) and (2.2.21). We then obtain
(2.3.4) Q2~2j) (x) - L2m-i2j) [Q2m'x]
1 . = J GJ2J ,0) (x,t)02J2rn) (t)dt
0
We know from (2.2.20)
(2.3.5)
Moreover,
(2.3.6) Q2J 2Pl (0) = Q2J 2Pl (1) = 0, p = 0, 1, •• , m-1 •
It follows that
(2.3.7)
identically. Thus (2.3.4) can be rewritten as
(2.3.8) 1 .
f GJ 2 J 'O) ( x, t) d t . 0
Next we note from (2.2.14) that
G( 2 ,0) = G (x t) m m-1 ' •
Hence
GJ 4 ' O ) ( X , t)
and in general,
= G ( 2 ,0) (X t) = m-1 '
(2.3.9) GJ2 j ,O) (x,t) = Gm-j (x,t) •
From (2.2.16) and (2.3.9) we have
Gm_ 2 (x, t)
(2.3.10) ( -1) m-j GJ 2 j 'O) ( x, t) = (-1) m- j Gm-j ( x, t) > 0
in the unit square O ~ x ~ 1 , 0 < t < 1.
Combining (2.3.3), (2.3.9), (2.3.10), (2.2.19), and
(2.3.8), it follows that
je( 2 j) {x) I ~ U 1 .
J JGJ2J,O) (x,t) I dt 0
This proves (2.1.10).
39
1 . = U f GJ 2 J,O) (x,t) dt I
0
= U Q2m-2j (x) '
j = 0, 1 , •. , m - 1 .
We next turn to prove (2.1.11). Due to (2.3.9), it
is enough to prove (2.1.11) for j = 1. From (2.2.14), it
follows that
( 2 • 3 • 11) GJ l ' O) ( x, t) =
Therefore
X
f y Gm-l (y,t) dy 0
1 + f (y - 1) Gm-l (y,t) d y •
X
(2.3.12) 1
J IGJl,O) (x,t) I dt 0
<
Rec a 11 ing ( 2. 2. 21)
1 X
f f Y IGm-l (y,t) I dy dt 0 0
1 1 + f f (1-y) JGm_ 1 (y,t) I dy dt.
0 X
1 f Gm- l ( y, t) d t , 0
m = 2, 3,
and the fact that in the unit square O < x < 1, 0 < t < 1,
(-l)m-1 Gm-l(y,t) > 0 '
we can assert that
(2.3.13) 0 2m_ 2 (y) =
40
1 f I Gm- l ( y, t) I d t • 0
On changing the order of integration in (2.3.12) and
making use of (2.3.13), we obtain
(2.3.14) 1
f I GJ l ' O ) ( x , t) I d t < 0
X
f Y 02rn-2(Y) dy 0
1 + f (l-y) 02m-2(Y) dy
X
Using (2.2.20) we note that
( 2 • 3 • 15) X 2 m- 2 ( x) =
X
f y 02~• (y)dy 0
1 f (1- y)Q 2~• (y)dy X
On integrating by parts, we have
X X
(2.3.16) X 2m-2 (x) = - Y 02rn' ( Yl I + 0
f 02m' (y) dy 0
1 1 02rn'(yl (l-yll + f -Q2m' (y) dy
X X
= -x 02rn' (x) + (1-x) 02m' (x) + 2Q 2m(x)
= ( 1 - 2x) Q2m' (x) + 2Q 2m(x)
Also
(2.3.17) X 2m-2' (x) = (1-2x) Q I I (X) 2m .
Since Q2 m- 2 vanishes only at x = 0 and X = 1, it follows
that the critical point at x2 m_ 2 (x) inside [0,1] is only
at x = 1 / 2. Also we note that x 2 m_ 2 (1) = X2m-2 (0) •
41
Further
(2.3.18) x2m_ 2 (1) - X2m_ 2 (1/2)
1 = f (2x-1) o2m_ 2 (y) dy > 0
1/2
Thus we conclude that x2m_ 2 (x) has an absolute maximum at
x = O and x = 1. Therefore, from (2.3.2), (2.3.14), and
(2.3.11), it follows that
(2.3.19) I e' (x) I < U 1
J IGJl,O) (x,t) I dt 0
< U X 2m-2 (x)
< U (1-2x) Q2m' (x) + 2Q 2m(x)
< U X 2m-2 ( 1) .
On using (2.3.15) it follows that
I e ' ( x) I ~ U X 2 m- 2 ( 1 ) = - U Q 2 m ' ( 1 ) = U Q 2 m ' ( 0 ) '
which proves (2.1.12).
That (2.1.11) and (2.1.12) are best possible follows
from the Peano theorem, or more simply, by choosing u(x) =
0 2 m (x), the Euler polynomial defined by (2.1. 7). In view
of (2.2.20), we have U =: maxo<x<llu( 2m)(x)I = 1. Further
use of (2.2.20) and the definition of L2m_ 1 [u,x] show that
L2m_ 1 [Q 2m,x] is identically zero. Our choice of u(x) then
gives pointwise equality in (2.1.11). Similarly it can be
shown that (2.1.12) is also pointwise best possible. This
proves the theorem.
It is perhaps worth remarking that any exact
evaluation of the integral of the absolute value of a
Peano kernel results in an exact error bound (see Sard

42
[1963] or Stroud [1974]). Generally error bounds
resulting from integration of a Peano kernel under the
assumption that u{x) e ck[a,b] also hold for u having
piecewise continuous kth derivative on [a,b], and even for
u having (k-l)st derivative absolutely continuous on
[a,b]. In the case given here we can thus expand the
class of functions for which the error bounds of Theorem
2.1 hold and hence are best possible.
As Theorem 2.1 is stated for function u{x) 2m times
continuously differentiable, it al so holds when the 2mth
derivative is merely piecewise continuous on [0,1].
Moreover the theorem holds even for the case that u(x) has
its {2m-1) st derivative absolutely continuous. In this
last case U, instead of being the max of the 2mth deriva
tive on [0,1], beaomes the "L infinity" norm of the gener
alized 2mth derivative. In the following chapters the
classes of functions k times continuously differentiable,
the class of functions having piecewise continuous kth
derivative and the class having k-lst derivative absolute
ly continuous may be treated as being interchangeable.

CHAPTER THREE MORE POLYNOMIAL ERROR BOUNDS
Introduction and Statement of Theorems
Let u e c( 2 m+ 2 ) [0,h] be given. It follows from a
result of Schoenberg [1966] that there exists a unique
polynomial w2m+l [u,x] of degree < 2m+l satisfying
(3.1.1) w2m+l[u,0] = u(0) ,
W2m+l (p) [u,0] = u (p) (0)
w2m+l (p) [u,h] = u(p) [u,h]
w2m+l[u,h] = u(h)
p = 2, 3, • , m + 1 .
Theorems 3.1 and 3.2 will give bounds on U ( j) ( X)
w(j) 2 m+l(x) for the cases m = 2 and m = 3 of polynomials
w 2 rn+l satisfying (3.1.1).
The polynomial w 2 m+l[u,x] can be expressed in
relation to the Hermite polynomial v 2 m-l [u" ,x]. To
illustrate the relation between w2 rn+l and v 2 m-l' let h = 1
and let v 2 m_ 1 [g,x] be the Hermite polynomial of degree at
most 2m - 1 matching g =: u" and its first m - 1
derivatives at 0 and 1. We can represent v 2 rn_ 1 [g,x] as
(3.1.2) v2m-1 [g,x] = A0 (x)g(0) + B0 (x)g(l)
+ Al (x)g' (0) + Bl (x)g' (1)
+ A2(x)g" (0) + B 2 (x)g" (1)
+ Am-1 ( x) g ( m-1) ( 0) + Bm-1 ( x) g ( m-1) ( 1)
43
44
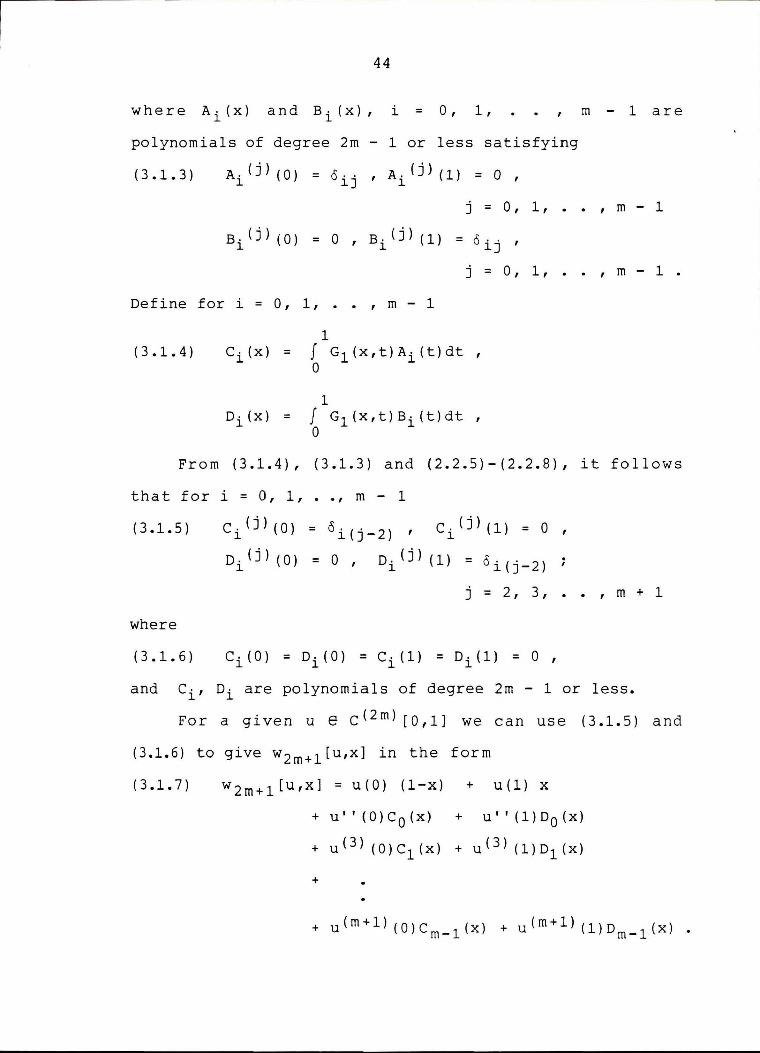
where Ai (x) and Bi (x), i = 0, 1 , . . , m - 1 are
polynomials of degree 2m - 1 or less satisfying
(3.1.3) A-(j)(O) = O··, A.(j)(l) = 0, l l] l
j = 0, 1, •• , m - 1
Bi (j) (0) = 0 , Bi (j) (1) = 0 ij ,
j = 0, 1, •. , m - 1.
Define for i = O, 1, •• , m - 1
(3.1.4) C · (x) = l
D · (x) = l
1 f G1 (x,t)Ai(t)dt, 0
1 f G1(X,t)Bi(t)dt, 0
From (3.1.4), (3.1.3) and (2.2.5)-(2.2.8), it follows
that for i = 0, 1, . . , m - 1
(3.1.5) c.(j)(O) = l
( . ) oi(j-2) , Ci J (1) = 0 ,
D · ( j) ( 0) l = 0 , Di (j) (1) = oi(j-2)
j = 2, 3, .. , m + 1
where
(3.1.6)
and Ci, Di are polynomials of degree 2m - 1 or less.
For a given u e c( 2 m) [0,1] we can use (3.1.5) and
(3.1.6) to give w2 m+l [u,x] in the form
(3.1.7) w 2 m+l[u,x] = u(O) (1-x) + u(l) x
+ u" (0)C 0 (x) + u" (l)0 0 (x)
+ u( 3 ) (O)C1(X) + u( 3 ) (l)D1(X)
+

45
Form= 2 and m = 3, we give (3.1.7) explicitly. For
m = 2, if u e C ( 6 ) [0,1], -then the unique quintic w5 [u,x]
matching u and its second and third derivatives at O and 1
is given by
(3.1.8) w5
(u,x] = (1-x) u(O) + x u(l)
+ u"(O)
+ u''(l)
[-7x/20 + x 2 /2 - x 4 /4 + x 5 /10]
[-3x/20 + x 4 /4 - x 5 /10]
+ u' '' (0) [-x/20 + x 3 /6 - x 4 /6 + x 5 /20]
+ u''' (1) [x/30 - x 4 ;12 + x 5 /20]
For u e c( 8 ) [0,1], the unique polynomial w7 [u,x] of
degree~ 7, matching u and its second, third and fourth
derivatives at O and 1 is given by
(3.1.9) w7
[u,x] = (1-x) u(O) + x u(l)
+ u"(O)
+ U I I ( 1)
[-Sx/14 + x 2 /2 - x 5;2 + x 6 /2 - x 7 /7]
[-x/7 + x 5 ;2 - x 6 /2 + x 7 /7]
+ u( 3 )(0) [-13x/210 + x 3 /6 - 3x5 /10
+ 4x 6 /15 -x 7 /14]
+ u( 3 ) (1) [4x/105 - x 5 /s + 7x 6 /30 - x 7 /14]
+ u( 4 ) (0) [-x/210 + x 4 /24 - 3x 5 /40
+ x 6 ;20 - x 7 /84]
+ u( 4 ) (1) [-x/280 + x 5 /40 - x 6 /30 + x 7 /84] •
The following theorem concerns the quintic
interpolant w5 .
Theorem 3.1 Let u e c6 [0,1] and let w5 [u,x] satisfy
(3.1.10) w5
(p) [u,O] = u (p) (0) ,
w5
(P) [u,1] = u(p) (1) , p = O, 2, 3 •
46
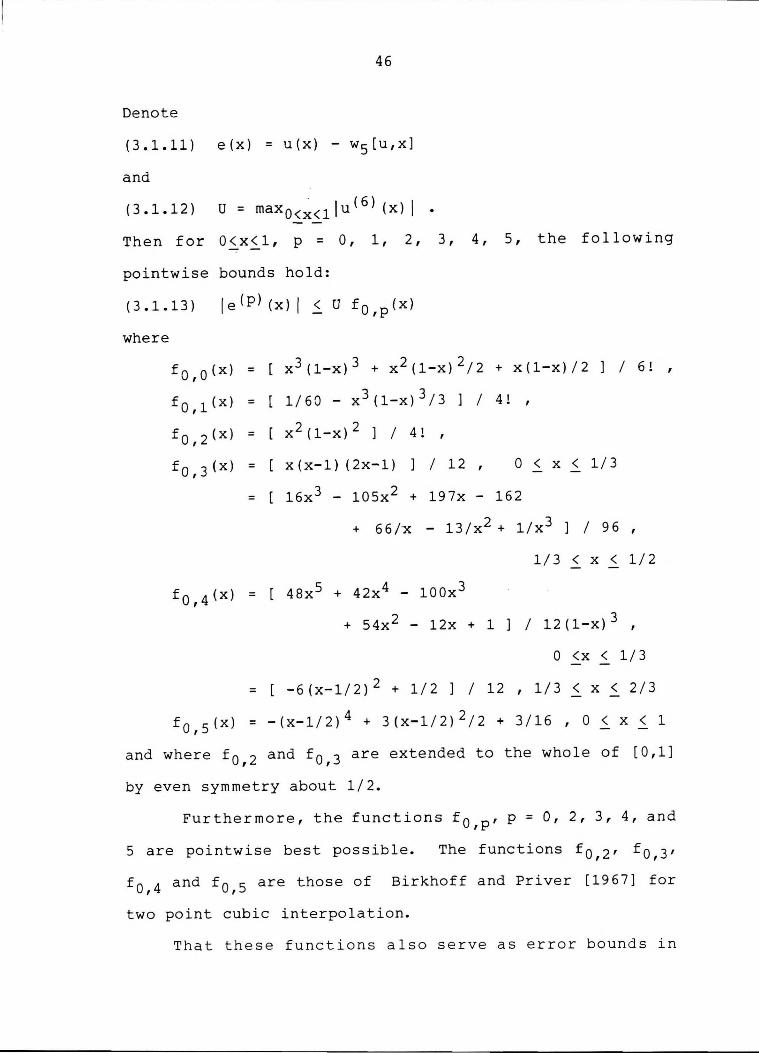
Denote
(3.1.11) e(x) = u(x) - w5 [u,x]
and
(3.1.12) . ( 6)
U = maxO<x<l I u (x) I • Then for o.s_x.s_l, p = O, 1, 2, 3, 4, 5, the following
pointwise bounds hold:
(3.1.13)
where
fo,o<xl = x 3 (1-x) 3 + x 2 (1-x) 2 /2 + x(l-x)/2 ] I 6 !
fQ,l(X) = 1/60 - x 3 (1-x) 3 /3 ] I 4 ! '
fo,2(X) = x 2 (1-x) 2 ] I 4 ! ' fo,3(X) = x(x-1) (2x-1) I 12 0 < X < 1/3
= 16x3 - 105x2 + 197x - 162
+ 66/x - 13/x2 + 1/x3 ] I 96 ' 1/3 ( X < 1/2
fo,4(X) = [ 48x5 + 42x4 - 100x3
+ 54x 2 - 12x + 1] / 12(1-x) 3 ,
= [ -6 ( x-1 / 2) 2 + 1 / 2 ] / 12
0 .s_x .s_ 1/3
1/3 .s_ X .s_ 2/3
'
f 0 , 5 (x) = -(x-1/2) 4 + 3(x-1/2) 2 /2 + 3/16 , o < x < 1
and where £0 , 2 and £0 , 3 are extended to the whole of [0,1]
by even symmetry about 1/2.
Furthermore, the functions fo,p' p = 0, 2, 3, 4, and
5 are pointwise best possible. The functions f 0 , 2 , f 0 , 3 ,
f 0 , 4 and fo,s are those of Birkhoff and Priver [1967] for
two point cubic interpolation.
That these functions also serve as error bounds in

47
the present case is a consequence of the fact that
w 511 [u,x] · is the unique cubic matching u" and u"' at 0
and 1. In other words w 511 [u,x] is the Hermite cubic
interpolation v 3 [g,x] where g = u". The error bounds
given by Birkhoff and Priver in terms of maxO<x<llg( 4 ) (x) I
are now expressed in terms of U = maxo<x< 1 1 u ( 6 ) (x) I (as
g( 4 ) is in fact u ( 6 )).
Denoting
(3.1.14) C = p p = 0, 1, .• , 5
we have
CO = 11 1 cl = 1 1 , c2 = 1
~ -
24 6 ! 2 6 ! 4 !
C3 = 1/3 , C4 = 1 , C5 = 1 . 9 4! ff 2
From (3.1.14) and (3.1.13) it follows that for every
u e c( 6 ) [O,lJ
(3.1.15) maxO<x<lle(P) (x) I < cp U
Remark 3.1 Note that
p = o, 1, .. , 5 .
p = 0, 1, .• , 5 •
If we set u(x) = t 0 , 0 (x) then we have
e (X) = f 0 , 0 (xl - w 7 [f 0 , 0 ,xJ
= fo,o(X) and U = maxo~x~1lfo,0( 6 ) I = 1
By Remark 3.1 we see that for u(x) = f 0 , 0 (x) equality is
attained in (3.1.15) for p = 0, 1, 2, 3, 4, 5. The
constants cp are thus the smallest possible.
The next . theorem gives error bounds for w7 , analogous
to the error bounds for w5 given in Theorem 3.1.
48
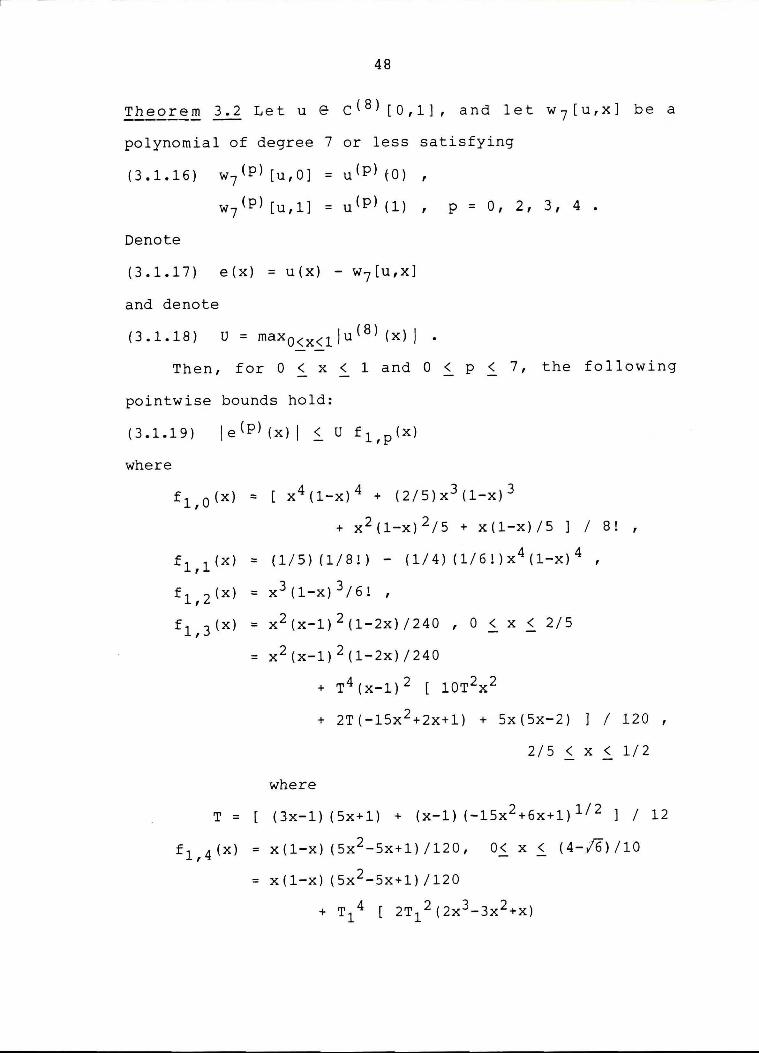
!h~£!~~ 3.2 Let u e c(B) [0,1], and let w 7 [u,x] be a
polynomial of degree 7 or less satisfying
(3.1.16) w7
<P) [u,O] = u(p) tO) ,
w7
(P) [u,1] = u(p) (1) , p = O, 2, 3, 4 •
Denote
(3.1.17) e(x) = u(x) - w7 [u,x]
and denote
( 3 . 1. 18 ) U = max O < x < 1 I u ( 8 ) ( x) I • Then, for O ~ x ~ 1 and O < p < 7, the following
pointwise bounds hold:
(3.1.19) Je(P) (x) I ~ U f 1 ,p(x)
where
f 1 , 0 (x) = [ x 4 (1-x) 4 + (2/5)x3 (1-x) 3
+ x 2 (1-x) 2 /5 + x(l-x)/5] / 8! ,
t1
,1
(x) = (1/5) (1/8!) - (1/4) (1/6 ! )x4 (1-x) 4 ,
t 1 , 2 (x) = x 3 (1-x) 3 /6!
t 1 , 3 (x) = x 2 (x-1) 2 (1-2x)/240 , 0 < x < 2/5
= x 2 (x-1) 2 (1-2x)/240
where
+ T 4 (x-1) 2 [ 10T2x 2
+ 2T(-1Sx 2+2x+l) + 5x(5x-2) ] I 120 ,
2/5 ( X ( 1/2
T = (3x-1) (Sx+l) + (x-1) (-15x2 +6x+l) l/ 2 ] / 12
f 1 , 4 ( X ) = X ( 1-X ) ( 5 X 2 - 5 X + 1 ) / 12 0 , 0 ( X ( ( 4-/6) / 1 0
= x(l-x) (Sx2-sx+l) /120
+ T14 [ 2T 1
2 (2x 3-3x 2+x)

49
where
+ 12T1 (-5x3 +sx2-3x)/5
+ (10x 3-isx 2 +9x-l) ] / 12 ,
for (4-/6)/10 < x < (3-/3)/6
T1
= 15x 2 - 9x - (x-1) (3x(4-5x)) l/ 2] /6x(2x-1) ,
t 1 , 4 (x) = x(x-1) (Sx 2-sx+l)/120
+ w4x [ 1ow2 (2x 2-3x+l)
+ 4W(1Sx2-2lx+6)
+ 5(10x 2-12x+3)
+ 5(10x 2-12x+3) ]/60,
for (3-/3) /6 < x < (6-/6) /10
and where
W = [ 3(1-x) (Sx-2) + x(3(1-x) (Sx-1) ) 1 / 2 ] , 6 (x-1) (2x-l)
t 1 , 4 (x) = x(x-1) (Sx2-sx+l)/120
(6-/6) /10 i X < 1/2
t 1 , 5 (x) = (2x-1)(10x 2-1ox+l)/l20
where
+ w14 [ 2ow1
2 (6x 2-6x+l)
+ 24W1 (15x2-14x+2)
+ 30(10x2-8x+l) ] / 120 ,
0 ( X < (4-/6)/10
w1
= [ - 15x2 + 14x - 2 - x(3x(4-5x)) 1 / 2
12x2 - 12x + 2
= (2x-1) (10x 2-1ox+l) /120 ,
(4-/6)/10 < X < (6-/6)/10
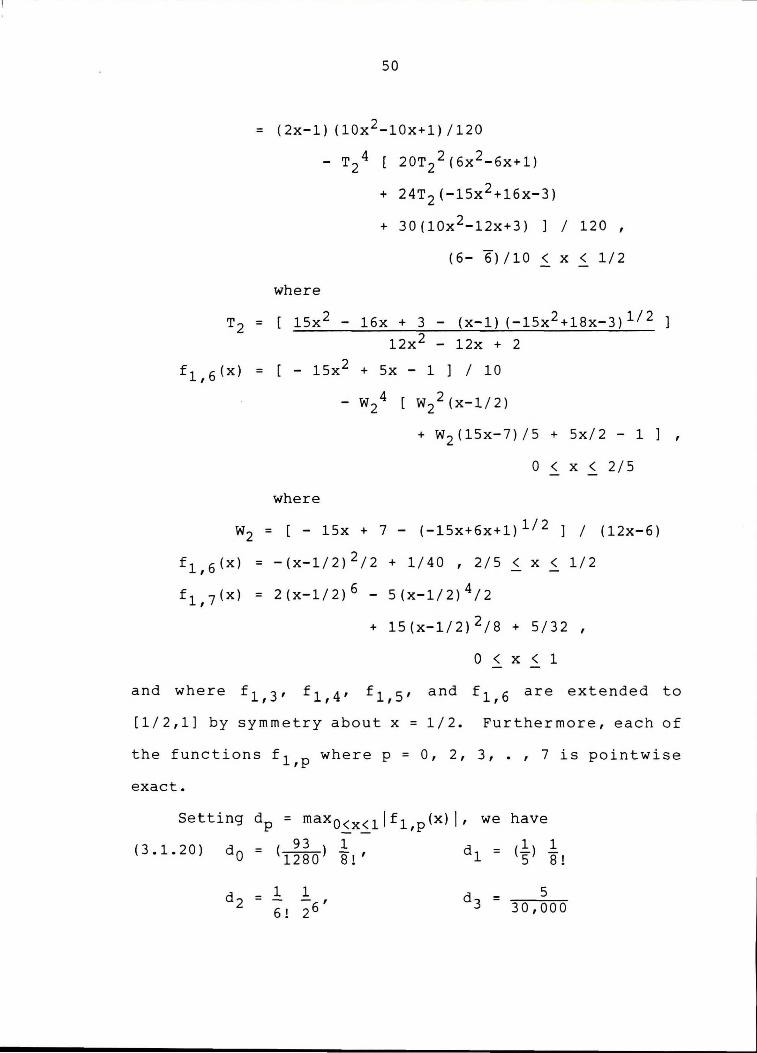
50
= (2x-1) (10x2-1ox+l) /120
where
- T24 20T 2
2 (6x 2-6x+l)
+ 24T 2 (-15x 2+16x-3)
+ 30(10x2-12x+3) ] / 120,
(6- 6)/10 < X ( 1/2
15x2 - 16x + 3 - (x-1) (-15x2 +18x-3) 1 / 2
12x2 - 12x + 2
f 1 , 6 (x) = [ - 15x2 + 5x - 1 ] / 10
where
- w 4 2 w2
2 (x-1/2)
+ w2 (15x-7) /5 + 5x/2 - 1 ] ,
0 ( X ( 2/5
w2 = [ - 15x + 7 - (-15x+6x+l) l/ 2 ] / (12x-6)
f 116 (x) = -(x-1/2) 2 /2 + 1/40 , 2/5 < x < 1/2
f 1 , 7 (x) = 2(x-1/2) 6 - 5(x-1/2) 4;2
+ lS(x-1/2) 2 /8 + 5/32 ,
0 ( X ( 1
and where f 1 , 3 , f 1 , 4 , f 1 , 5 , and f 1 , 6 are extended to
[1/2,1) by symmetry about x = 1/2. Furthermore, each of
the functions fl,p where p = 0, 2, 3, . , 7 is pointwise
exact.
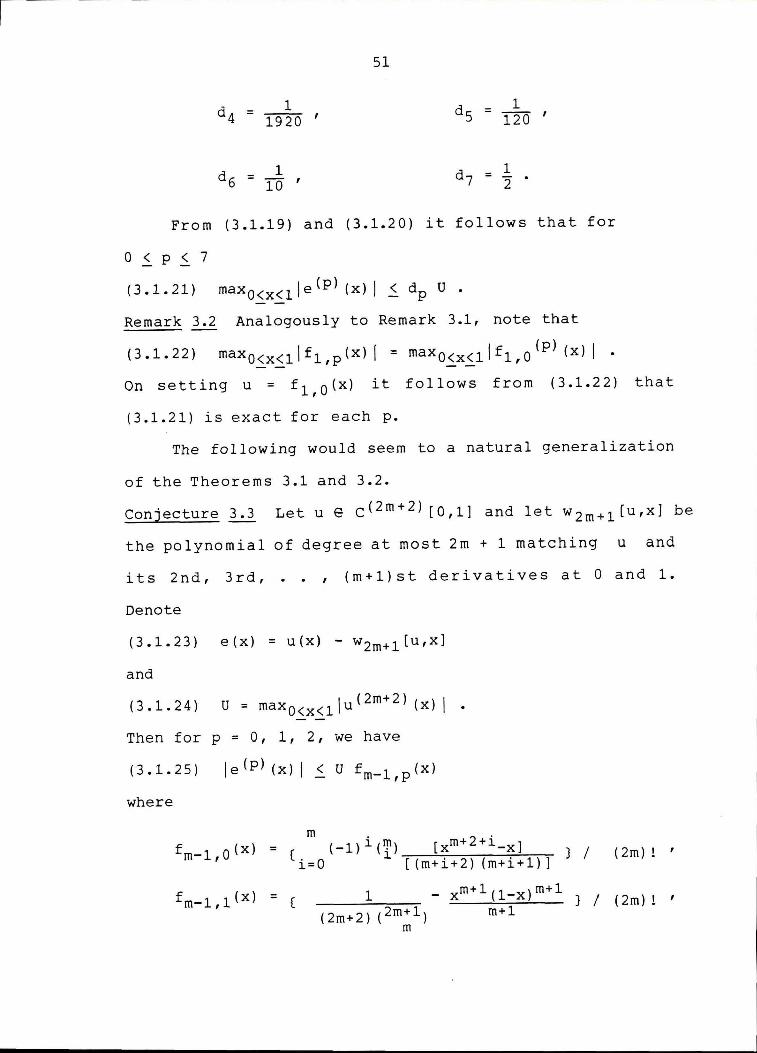
Setting dp = max 0~x~1 Jf 1 ,p(x) I, we have
( 3 1 20 ) d = ( 93 ) 1 d (1) 1 • . 0 1280 8!' 1 = 5 8!
5 30,000
51
d - 1 7 - 2
From (3.1.19) and (3.1.20) it follows that for
0 < p .s_ 7
(3.1.21) maxo.s_x.s_lle(p) (x) I .s_ dp U •
Remark 3.2 Analogously to Remark 3.1, note that
(3.1.22) maxo.s_x.s_lif 1 ,P(x) I = maxo.s_x.s_ilf 1 , 0 (P) (x) I • On setting u = f 110 (x) it follows from (3.1.22) that
(3.1.21) is exact for each p.
The following would seem to a natural generalization
of the Theorems 3.1 and 3.2.
Conjecture 3.3 Let u e c( 2 m+ 2 ) [0,1] and let w2 m+l[u,x] be
the polynomial of degree at most 2m + 1 matching u and
its 2nd, 3rd,
Denote
• • I (m+l)st derivatives at O and 1.
(3.1.23) e(x) = u(x) - w2m+l[u,x]
and
(3.1.24) U - max I u ( 2 m + 2 ) ( x) I - 0<x<l •
Then for p = 0, 1, 2, we have
(3.1.25)
where
m fm-1,o(x) = (-l)i(f!l) [xm+2+i_x] } / ( l. -=----=:..:..:....---,-__;:,:....,...._..,... ( 2 m) ! '
i=0 [ (m+i+2) (m+i+l)]
fm-1,1 (X) = ( 1 - xm+l(l-x)m+l } / (2m) ! , ( 2m+ 2 ) (2m+l) m+l
m
52
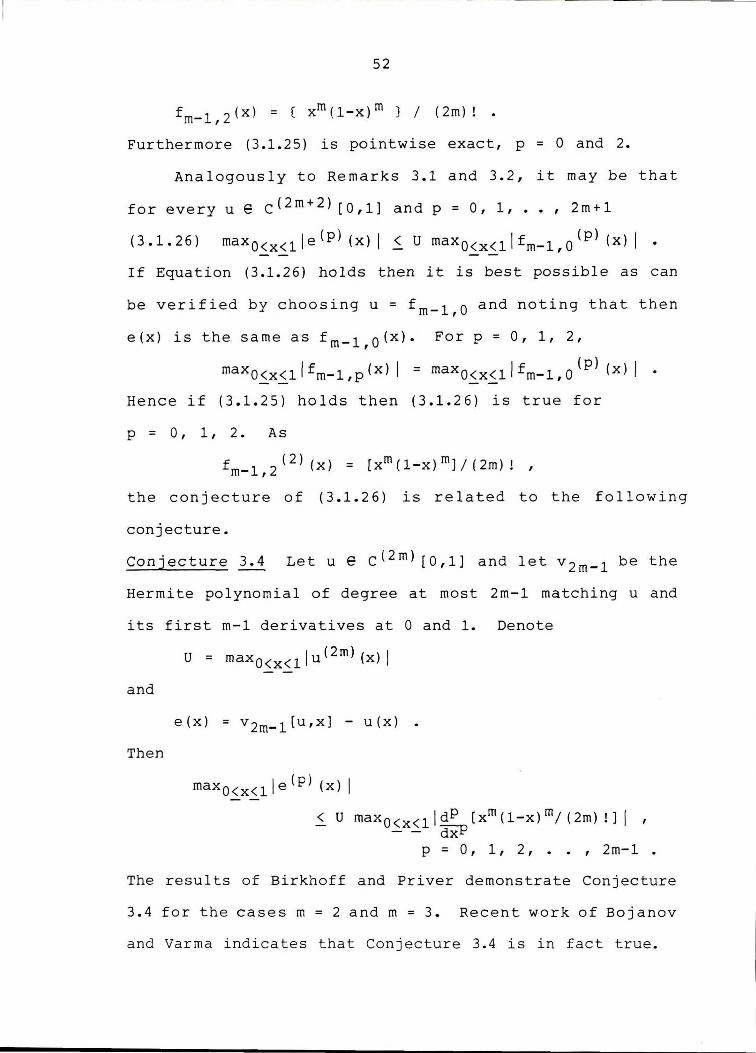
frn-l, 2 (x) = ( xrn(l-x)rn } / (2m) ! .
Furthermore (3.1.25) is pointwise exact, p = 0 and 2.
Analogously to Remarks 3.1 and 3.2, it may be that
for every u e c( 2 m+ 2 ) [0,1] and p = 0, 1, . . ' 2m+l
(3.1.26) maxO<x<lle(P) (x) I .s_ U maxo.s_x.s_llfm-l,O(p) (x) I • If Equation (3.1.26) holds then it is best possible as can
be verified by choosing u = frn-l,O and noting that then
e(x) is the same as fm-l,O(x). For p = O, 1, 2,
maxo.s_x.s_1lfm-l,p(x) I = rnaxo.s_x.s_1lfm-l,O (p) (x) I Hence if (3.1.25) holds then (3.1.26) is true for
p = 0, 1, 2. As
f ( 2 l(x) = [xm(l-x)m]/(2m)!, m-1,2
the conjecture of (3.1.26) is related to the following
conjecture.
Conjecture 3.4 Let u e c( 2 m) [0,1] and let v 2 m-l be the
Hermite polynomial of degree at most 2m-l matching u and
its first m-1 derivatives at O and 1. Denote
U = maxO<x<llu(2m)(x)J
and
e(x) = v 2m_ 1 [u,x] - u(x)
Then
maxO<x<l I e (p) (x) I
< u maxo<x<lldp [xm(l-x)m/(2m)!]I, - - dxP
p = O, 1, 2, •. , 2m-1 .
The results of Birkhoff and Priver demonstrate Conjecture
3.4 for the cases m = 2 and m = 3. Recent work of Bojanov
and Varma indicates that Conjecture 3.4 is in fact true.

53
The next theorem will concern an interpolatory
polynomial which enjoys a similar property to that of
the above conjectures. Let u e c( 4 ) [0,1]. Define
k 3 [u ,x] by
(3.1.27) k 3 [u,x] = u(O) (1-x) {1-2x) 2 + u{l/2) 4x(l-x)
+ u(l) x(l-2x) 2 + u' (1/2) 2x(l-x) (2x-1) •
Then k 3 [u,x] is the unique polynomial of degree 3 or less
satisfying
(3.1.28) k 3 [u,x] = u(O) , k 3 [u,1] = u(l) ,
k 3 [u,1/2] = u(l/2) k 3 ' [u,1/2] = u' (1/2)
Theorem 3.3. Let u € c( 4 ) (0,1]. Denote
e(x) = k 3 [u,x] - u(x) ,
U = maxO<x<lju(4)(x)I.
Then for p = 0, 1, 2, 3, we have
(3.1.29)
where
ie(p) (x) I < a U - p
ao = 1 / ( 2 8 4 ! ) ,
a 2 = (5/2) (1/4!)
a 1 = 1 / (2 2 4!) ,
a 3 = 1/2
That the ap are the best possible can be verified by
choosing
u(x) = [ x(l-x) (1-2x) 2 ] I (2 2 4!) •
Due to the similarity between the proof of Theorem
3.3 and several other proofs in the following chapters, it
would be redundant to prove it here.

54
Proof of Theorem 3.1
Let u e c( 6 ) [0,1]. Then
(3.2.1) w5 [u,x] = (1-x) u (0) + X u(l)
+ u"(0) [-7x/20 + x 2 /2 - x 4 /4 +
+ u"(l) [-3x/20 + x 4 /4 - x 5 ;10J
+ u"'(O) [-x/20 + x 3 /6 - x 4 /6 +
+ u"'(l) [x/30 - x 4 /12 + x 5 /20]
is the only polynomial of degree~ 5 satisfying
(3.2.2)
Define
(3.2.3)
Then
(3.2.4)
and
(3.2.5)
w5
(Pl[u,O] = u(P)(O)
w5
(P) [u,1] = u(P) (1)
e(x) = u(x) - w 5 [u,x] •
p = o, 2, 3 •
e(p) (0) = 0, e<P) (1) = 0, p = 0, 2, 3,
e ( 6 ) (x) = Q(x) =: u ( 6 ) (x) •
x 5 /10]
x 5 120J
In other words, e(x) is the unique solution of the
differential equation (3.2.5) with boundary conditions
(3.2.4). We can rephrase (3.2.4) and (3.2.5) as
(3.2.6)
and
(3.2.7)
d 2e = y(x) ,
dx 2
e(0) = 0, e(l) = 0 ,
~ = Q(x) '
dx 4
y(0) = y(l) = y'(0) = y'(l) = 0.
From (3.2.6) and (3.2.2)-(3.2.6), it follows that
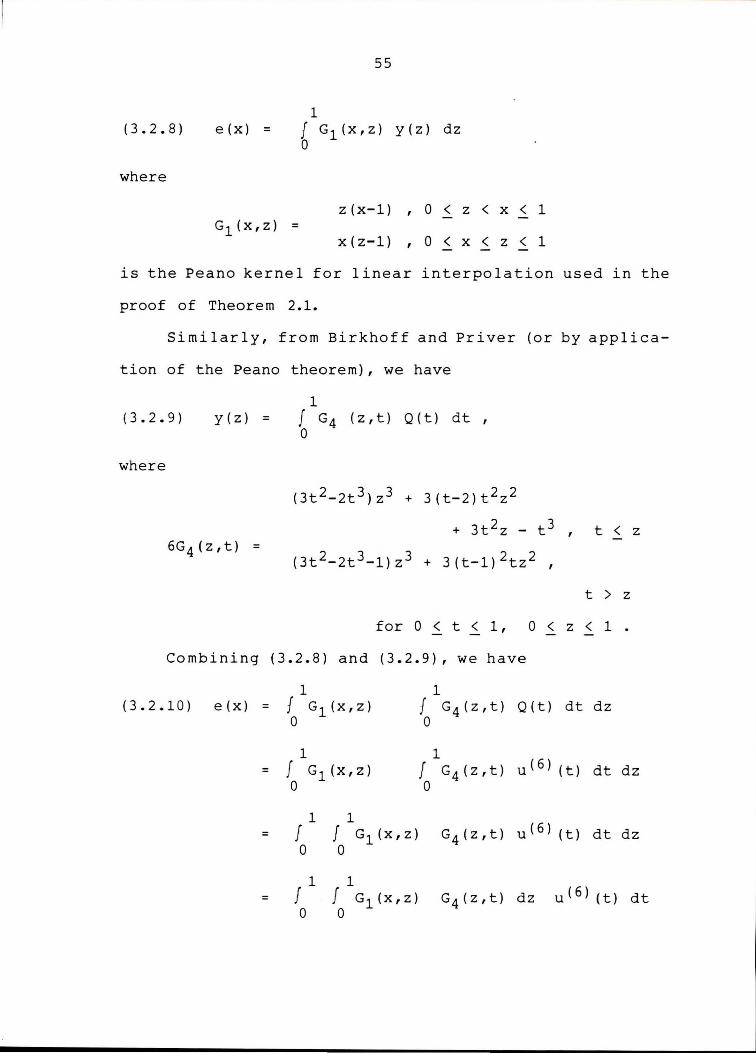
(3.2.8) e (X) =
where
55
1 f G1 (x,z) y(z) dz 0
G1 (x,z) = Z ( x-1) , 0 ( Z ( X ( 1
X ( z-1) , 0 ( X ( Z ( 1
is the Peano kernel for linear interpolation used in the
proof of Theorem 2.1.
Similarly, from Birkhoff and Priver (or by applica
tion of the Peano theorem), we have
(3.2.9) y ( z) =
where
6G 4 ( z, t) =
1 f G4 (z,t) Q(t) dt , 0
(3t 2-2t 3 )z 3 + 3(t-2)t2 z 2
+ 3t2 z - t 3 , t < z
(3t 2-2t3-l)z 3 + 3(t-1) 2tz 2 ,
t > z
for O ~ t ~ 1, 0 < z < 1 .
Combining (3.2.8) and (3.2.9), we have
1 1 (3.2.10) e (x) = f G1 (x,z) f G4 (z,t) Q(t) dt dz
0 0
1 1 = f G1 (x,z) f G4 (z,t) u( 6 ) (t) dt dz
0 0
1 1 = f J G1 (x,z) G4 (z,t) u ( 6 ) (t) dt dz
0 0
1 1 = J f G1 (x,z) G4 (z,t) dz u( 6 ) (t) dt
0 0
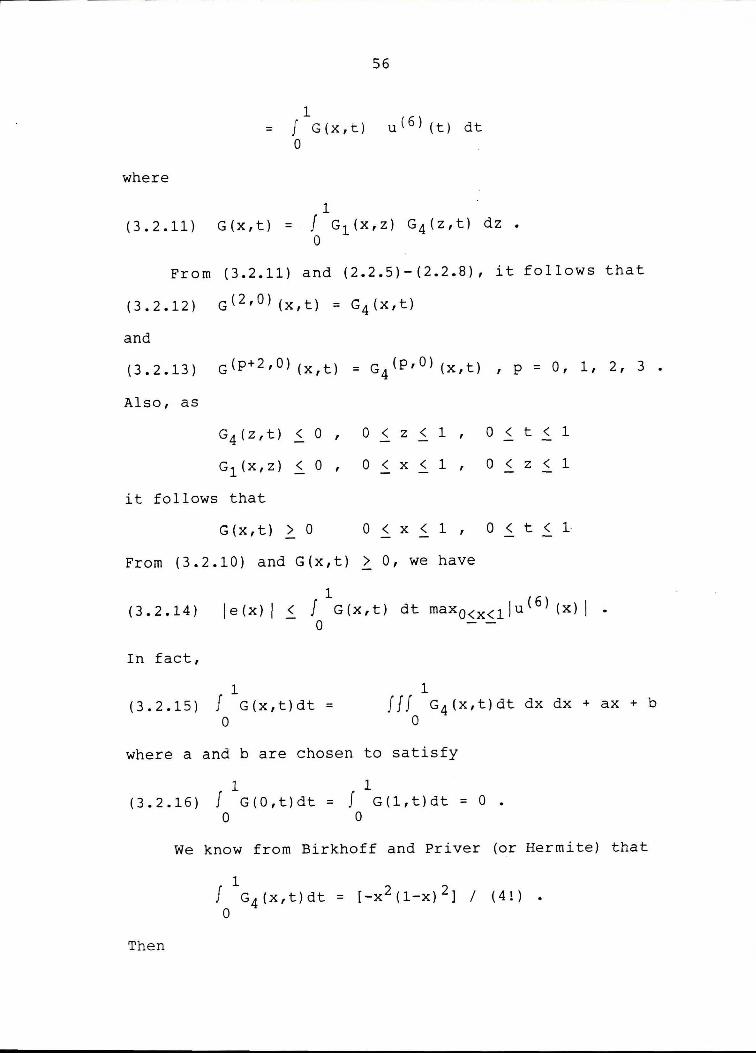
56
1 = f G(x,t) u ( 6 ) (t) dt
0
where
1 (3.2.11) G(x,t) = f G1(X,Z) G4(z,t) dz.
0
From (3.2.11) and (2.2.5)-(2.2.8), it follows that
(3.2.12) G( 2 ,0) (x,t) = G4 (x,t)
and
(3.2.13) G(p+ 2 ,0) (x,t) = G4
(p,O) (x,t) , p = 0, 1, 2, 3.
Also, as
G4 (z,t)
G1 (x,z)
it follows that
< 0
< 0
,
,
0 < z < 1 , 0 < t < 1
0 ( X ( 1 , 0 ( Z ( 1
G(x,t) > 0 0 < X < 1 , 0 < t < L
From (3.2.10) and G(x,t) ~ 0, we have
(3.2.14) le(x) I~ f 1G(x,t) dt maxo<x<llu( 6 ) (x) I .
0
In fact,
1 (3.2.15) f G(x,t)dt =
0
1 f Jf G4 (x,t)dt dx dx +ax+ b
0
where a and bare chosen to satisfy
1 1 (3.2.16) f G(O,t)dt = f G(l,t)dt = 0 •
0 0
We know from Birkhoff and Priver (or Hermite) that
1 f G4 (x,t)dt = [-x2 (1-x) 2 ] / (4!).
0
Then
57
1 f G 4 ( x, t) d t dx d:X = 1 0 ~
( - sx4 + 3x 5 - x 6 ) , 2
and to satisfy (3.2.16), we have a and b of (3.2.15) as
a= 1/2 , 6!
Rearranging, we have
1 (3.2.17) f G(x,t)dt =
0
b = 0 •
- sx 4 ;2 + 3x5 - x 6 + x/2 ] /6!
= [ x 3 (1-x) 3 + (1/2)x2 (1-x) 2 + (1/2)x(l-x) ] / 6!
= fo,o(x) •
Combining (3.2.14) and (3.2.17), we have the result of the
theorem for p = 0.
From 3.2.10, we have
1 (3.2.18) le(P) (x) I ~J IG(p) (x,t) I dt maxO<x<llf( 6 ) (x) I •
0
From 3.2.11, we have
X 1 (3.2.19) G(l,O) (x,t) = f y G4 (y,t)dy + f (y-l)G4 (y,t)dy.
0 X
Therefore as G4 (y,t) ~ 0 0 ~ y ~ 1, 0 < t < 1
X
(3.2.20) !G(l,O) (x,t) I ~ f YIG 4 (y,t) !dy 0
1 + f ( 1-y) I G 4 ( y, t) I dy •
X
As before, we have
1 f IG4 (y,t) !dt = y 2 (1-y) 2 / 4! • 0
58
Thus
1 1 X
(3.2.21) J jG(l,O) (x,t) [dt < f f y jG4 (y,t) I . dy dt 0 0 0
1 1 + f f (1-y) IG4 (y,t) j dy dt
0 X
X 1 = f Y f IG4(y,t) I dt dy
0 0
1 1 + f (1-y)
X f IG4(y,t) I dt dy 0
X y3(1-y)2 = f [ ] I 4!dy
0
1 ( 1-y) 3y2 + f [ ] / 4 ! dy
X
= 1/60 - (x 3 (1-x) 3 )/3 ] I
= fo,l(X)
which achieves its maximum value of 1/1440 for x = 0 or
x = 1. We note also that
1/ 1440 = 1/ ( 2 6 ! ) = c1
= maxo~x~1lfo,o(l) (x) I = maxo~x~1lfo,1(x) I ·
Combining (3.18) and (3.13), we have
(3.2.22) je(P) (x) I ~
1
4 !
J jG 4 (p- 2 ,0) (x-t) jdt max 0<x<llu( 6 ) (x) I , 0
for p = 2, 3, 4, 5.
As this inequality is precisely that used by Birkhoff
and Priver to derive the functions f 0 , 2 , f 0 , 3 , f 0 , 4 and
59
f 0 , 5 , the theorem follows for p = 2, 3, 4, 5. The proof
of Theorem 3.2 is very similar and hence omitted.
CHAPTER FOUR A QUARTIC SPLINE
Introduction and Statement of Theorems
Among the many beautiful properties of the complete
cubic spline is the fact that for a given partition and
function values, the cubic spline is obtained by solving a
tridiagonally dominant system of equations.
Unfortunately, when one uses higher order complete splines
the bandwidth grows. In fact, for a 2m times continuous
spline of order 2m+l, the bandwidth of the system of
equations is 2m+l. Furthermore the diagonal becomes less
dominant ask increases.
It is na tura 1 then, to increase the order of the
spline but preserve bandwidth. Ideally we would hope to
increase the diagonal dominance and order of convergence.
In this chapter we introduce a quartic c( 2 ) spline which
gives O(h 5 ) rate approximation to a c(S) function. The
quartics are obtained by the solution of a tridiagonally
dominant system. As desired, it is more diagonally
dominant than the system associated with the complete
cubic spline.
The main result of this chapter will be to give an
exact error bound for the quartic spline discussed here.
We first give the definition.
60

61
Let f be a real-valued function defined on [a,b].
k Choose a partition (xi}i=O such that
a= x 0 < x 1 < ••• < xk = b •
Let zi = (xi-l + xi)/2, be the midpoint of [xi-l' xi] for
i = 1, 2, • , k and for these i set h · 1 = x · - x · 1 • ].- l. ].-
Definition 4.1 Given the function f and the partition
k (xi)i=O' we define a quartic spline s(x) such that
(4.1.1) s(x) e c2 [a,bl r, P 4 [xi-l' xi] , i = 1, 2, • , k;
x . ] denotes the functions which are l.
quartics when restricted to [xi-l' xi])
(4.1.2)
and
s(xi) = f(xi) for i = 0, 1, .• , k
s(zi) = f(zi) for i = 1, 2, •. , k
( 4 .1. 3) s ' (a) = f' (a) and s ' ( b) = f ' ( b) •
Lemma 4.1 Let f be a real-valued funtion defined on
[a, bl k and let (xi)i=O be a partition of [a,b]. A
quartic splines satisfies Equations (4.1.1) and (4.1.2)
if and only if s satisfies the tridiagonal system of
equations for i = 1, 2, •. , k - 1
(4.1.4)
-hi s' (xi_ 1 ) + 4(hi + hi_ 1 ) s' (xi) - hi-l s' (xi+ll
= -11 [(hi-1/hi) - (hi/hi_1 )] f(xi)
+ 16 [(hi-1/hi) f(zi+ll - (hi/hi-l) f(zi)]
- 5 [(hi-1/hi) f(xi+ll - (hi/hi-l) f(xi-l)]
where hi= xi+l - xi.
We will give the proof later.

62
Assuming from (4.1.2) that f(xi), i = 0, 1, •• , k
and f(zi), i = 1, 2, •• , k are known, then (4.1.4) is a
system of k - 1 equations in the unknown variables
s'(xi), i = 1, 2, .• , k. If we impose the conditions of
(4.1.3) that s' (x 0 ) = f' (a) and s' (xk) = f' (b) are given,
we have k-1 unknowns and the k - 1 diagonally dominant
equations (4.1.4). Lemma 4.1 thus assures us that s'(xi)
can be uniquely determined for given conditions (4.1.1)
(4.1.3). As will be shown in the proof of the lemma, there
is, on any given subinterval [xi, xi+ll, a unique quartic
si(x) satisfying the five conditions
(4.1.5) S·(X·) = f(Xl.· ) l. l. si(zi+l) = f(zi+ll
s I • ( X. ) ::: s I ( Xl.· ) l. l.
s'i(xi+ll == s'(xi+l) .
Equations (4.1.4) are derived by imposing the conditions
that
For i == 1, 2, • • , k, si(x) is thus the restriction of
the spline s to [xi' xi+l].
Summarizing, unique solution of (4.1.4) implies that
s(x) is uniquely defined on each partition subinterval
[xi, xi+ll, i = 0, 1, •. , k-1, which is to say, on all
of [a, b]. We have shown
Corollary 4.1 The quartic spline of Definition 4.1 is, for
a given partition (xi}1=o and function f, unique.
We now make the comparisons with the complete cubic
spline more explicit. The system of equations

63
corresponding to (4.1.4) for the complete cubic spline has
left-hand side
his' (xi-1) + 2 (hi + hi-1) s' (xi) + hi-1 s' (xi+ll .
In comparison (4.1.4) is twice as diagonally dominant.
To interpolate the 2k + 1 function values f(xi) and
f (zi) using our c( 2 ) quartic required solving the
tridiagonal system of k - 1 equations (4.1.4). As the
cubic spline must match derivative and second derivative
values at each interior function value, interpolation of
the same 2k + 1 function values by the c( 2 l cubic spline
would entail solution of a system of 2k - 1 equations. In
other words, the matrix equation to be solved for the
quartic is only half as large as that required for the
cubic.
We can now state the main theorem of this chapter.
Given a partition (xi}t=o of [a, b], denote
h = maxO<i<k-lhi = maxO<i<k-l(xi+l-xi) •
For each x in [a,b], there exists i such that
0 < i < k - 1 and xi < X s_xi+l" We set t = (X - - Xi)/hi.
Theorem 4.1 Let f e c(S) [a,b] and let k (xi}i=O be a
partition of [a,b]. Let s (x) be the twice continuously
differentiable spline corresponding to f and
wheres satisfies (4.1.1)-(4.1.3). Then
(4.1.6) jf(x) - s(x) I ~ jc(t) I h 5 maxa<x<blf (S) (x) I / 5!
where
c(t) = [3t 2 (1-2t) (1-t) 2 + t(l-2t) (1-t)] / 6 •
Define
64
= ( / 1 - _J:. ) ( l / 5 + 2/30 ) / 6 . 4 m
It follows that
(4.1. 7)
Furthermore, neither lc(t) I nor c0
can be improved, as we
can show by letting f = x 5 /5! and letting k become
arbitrarily large for an equally spaced partition. An
approximate decimal expression for c0
is .0244482 and
c0
/5! is approximately .000203818 •
We will also show
(4.1.8) lf'(xi) - s'(xi)l
< h 4 maxa<x<blf (5 ) (x) I / 6!
and that this estimate is exact.
Related to Theorem 4.1 is the following conjecture.
Conjecture 4.1 Let f e c( 5 ) [a,b] and let (xi}1=o be a
partition of [a,b]. Let s(x) be the twice continuously
differentiable spline corresponding to f and
wheres satisfies (4.1.1)-(4.1.3). Then
(4.1.9) If' (x) - s' (x) I ~ h 4maxa<x<blf( 5 ) (x) I / 6! .
If Conjecture 4.1 holds, then the constant 1/6! can not be
improved. This conjecture has been verified numerically.
Remark 4.1 Given f e c 5 [a,b] and a partition (xiJf=o of
[a,b], let s be the quartic C ( 2 ) spline satisfying
(4.1.1)-(4.1.3). Then the supremum norm I lf(i) - s(i) 11
is of order hS-i maxa<x<b If (5 ) (x) I, i = o, 1, 2.
65
Theorem 4.1 demonstrates that the quartic c( 2) spline
gives the best possible order of approximation to
functions from the smooth class c( 5 l. We next discuss
interpolation to the much less smooth class of functions
which are merely continuous on [a,b]. As f' (a) and f' (b)
are not necessarily defined, we consider the quartic c< 2)
spline satisfying (4.1.1) and (4.1.2) with boundary
conditions
(4.1.10) s' (a) = s' (b) = 0 •
Denote w(f,h) =: sup!x-y!ih!f(x) - f(y) I. Theorem 4.2 Let f e C[a,b]. If (xiJf=o is the partition
of equally spaced knots, then for xi< x < zi+l = (xi+
, k - 1, we
have
(4.1.11) If (x) - s (x) I i c (t) w (f ,h) 0 < t < 1/2
and for zi+l ix i xi+l' or 1/2 ~ti 1
(4.1.12) lf(x) - s(x)! < c(l-t) w(f,h)
where c(t) = (1 + (13/3)t - 3t 2 - (58/3)t 3 + 16t 4 }
Note that maxO<t<l/ 2c(t) is approximately equal to
1.6572.
The bound of the preceding theorem is only valid for
equally spaced knots. For arbitrary partitions we can not
give a bound of this same form. However, if
we have the following theorem.

66
Theorem 4.1.3 Let f(x) e C[a,b], and lets be the c( 2 l
quartic spline satisfying (4.1.1), (4.1.2), and (4.1.9).
Then for xi~ x ~ zi+l' and i = 0, 1, 2,
(i.e., for 0 ~ t ~ 1/2 with t = (x - xi)/hi)
(4.1.13) Jf(x) - s(x) I < c 1 (t) w(f,h) ,
and for zi+l ~ x ~ xi+l' i.e. 1/2 ~ t ~ 1,
(4.1.14) Jf(x) - s(x) I _s. c 1 (1-t) w(f,h)
where
c 1 (t) = [1 + 10t2 - 28t3 + 16t4 ]
. . ' k - 1,
+ (8/3) [m 2 + m] [t(l-2t) (1-t)] •
Theorems 4.2 and 4.3 indicate that for suitable
partitions the quartic c 2 spline can provide acceptable
approximations to functions which are merely continuous on
[a,b].
Proof of Lemma 4.1
We first give an expression for the unique quartic
matching function and derivative values at endpoints and
function values at the midpoint. Specifically, let f be a
real-valued function defined on [0,1], and differentiable
at 0 and 1. Let
(4.2.1)
P1 (x) = 1 - llx2 + 18x3 - 8x 4 = (l-2x) (l-x) 2 (1+4x) ,
P2 (x) = 16x2 - 32x3 + 16x4 = 16x2 (1-x) 2 ,
P3 (x) = -sx2 + 14x3 - 8x 4 = -(1-2x)x2 [1+4(1-x)]
P4 (x) = x- 4x 2 + sx 3 - 2x 4 = x(l-2x)(l-x) 2
P5 (x) = x 2 - 3x3 + 2x 4 = x 2 (1-2x) (1-x) .
Then
(4.2.2)
67
L[f,x] = P1 (x)f(0) + P2 (x)f(l/2) + P3 (x)f(l)
+ P4 (x)f' (0) + P5 (x)f' (1)
is the unique quartic satisfying
(4.2.3) L[f,0] = f(0) , L[f,1/2] = f(l/2) ,
L[f,1] = f(l) , L' [f,0] = f' (0) , L' [f,1] = f' (1)
Lis a linear functional and a projection. If f is a
polynomial of degree four or less, then L[f,x] = f(x). In
the future calculations we will need the following facts
about the quartics p . , l
(4.2.4) P111 (0) = -22 P1
11 (l) = -10
P2 "(0) = 32 P211 (l) = 32
P311 (0) = -10 P3
11 (l) = -22
P 411 (0) = -8 P 4
11 (l) = -2
Ps"(0) = 2 Ps''(l0) = 8
Let z i + 1 = (X· l + xi+ll /2. On the interval [xi, xi+ll,
the unique quartic Li[f,x] interpolating f(xi), f'(xi),
f(zi+ll, f(xi+ll, and f'(xi+ll can be expressed in terms
of Pi. In fact, let t = (x - xi)/hi where hi= xi+l - xi.
Then
(4.2.5) Li[f,x] = f(xi) P1 (t) + f(zi+l) P2 (t)
+ f(xi+l) P3 (t) + hi f'(xi) P4 (t)
+ hi f I (Xi+l) P5 (t) .
Lets be the quartic spline of Definition 4.1 corres
ponding to f and the given partition. Then the restric
tion si(x) of s to [xi,xi+l] is a quartic. Hence
Li[s,x]
have
(4.2.6)
68
Using the facts that s(xi)
si(x) = f(xi) P 1 (t) + f(zi+l) P2 (t)
= f(X·), l
+ f(xi+l) P 3 (t) + hi s'(xi) P4 (t)
+ hi s' (xi+ll P 5 (t) , t = (x-xi) /hi •
In order thats be twice continuously differentiable,
we must satisfy
(4.2.7)
where si is the restriction of s to [xi, xi+l] and si-l is
the restriction of s to [xi_ 1 ,xi].
(4.2.6) twice we have
Differentiating
(4.2.8) s'' (xi+) = h~2 ( f(xi)P1'' (0) + f(zi+l)P2'' (0)
l
+ f(xi+ll P 311 (0) +his' (xi) P 4
11 (0)
+hi s'(xi+ll P5 "(0)}.
Similarly, from rewriting (4.2.6) for the interval
[x- 1 , x-], we have 1- 1
(4.2.9) s" (x - -) = 1
+ f(xi) P 311 (1)
+ hi-1 s' (xi-1) P4" (1)
+hi-l s'(xi) Ps"(l)}.
Setting s" (xi+) = s" (xi-) by equating (4.2.8) and
(4.2.9)
have
and using P-"(0) 1
and P - "(1) 1
from (4.2.4), we
(4.2.10)
69
(-22 f(xi) + 32 f(zi+l) - 10 f(xi+l)
- 8 hi s'(xi) + 2 hi s'(xi+ll
= (-10 f(x. 1 ) + 32 f(z.) - 22 f(x-) 1- l l
} / h,2 l
- 2 hi-1 s' (xi-1) + 8 hi-1 s' (xi) } / hi-12 •
Factoring two, multiplying by hihi-l' and putting the
known function values on the right hand side, we have
(4.2.11) -his' (xi-l) + 4(hi+hi-l) s' (xi) - hi_ 1s' (xi+l)
= -11 [(hi-1/hi) - (hi/hi_1 )] f(xi)
+ 16 [ (hi-1/hi) f (zi+ll - (hi/hi-l) f (zi)]
- 5 [(hi-1/hi) f(xi+ll - (hi/hi-l) f(xi_ 1 )]
which is the desired system of equations (4.1.4). Having
established Lemma 4.1, we next turn to a proof of Theorem
4 .1.
Proof of Theorem 4.1
Our method of proof is to establish a pointwise
bound. As in the proof of Lemma 4.1, let Li[f,x] be the
unique quartic agreeing with f(xi), f(xi+ll, f(zi+l),
f'(xi), and f'(xi+ll, and lets be the twice continuous
quartic spline corresponding to f and Equations (4.1.1) to
(4.1.3) on the partition (xi}~=O· Then for xi~ x ~ xi+l'
we have
(4.3.1) if(x) - s(x) I < if(x) - Li[f,x] I
+ !Li[f,x] - s(x) I . Assume that f e c(S) [a,b]. By a proof attributed to
Cauchy, we know that
70
(4.3.2) jf(x) - Li[f,x] I .s_ (hi 5 /S!) Jt 2 (1/2-t) (1-tJ 2 j u
where t = (x-xi)/hi and U is the maximum of jf( 5 ) (x) I on
[xi,xi+l]. Equation (4.1.9) gives a pointwise bound for
jf(x) - Li[f,x] j.
Let i be arbitrary and xi~ x ~ xi+l" We next turn
our attention to deriving a similar bound for
Subtracting (4.2.6)
from (4.2.5) gives
(4.3.3) Li[f,x] - si(x) = hi [f'(xi) - s'(xi)] P 4 (t)
+ hi [f' (xi+ll - s' (xi+ll] P 5 (t)
Denoting
(4.3.4)
then we have from (4.2.5),
(4.3.5)
hi max(je'(xi)j, je'(xi+l)j} (jP 4 (t)j+JP 5 (t)j}.
As P 4 (t) = t(l-2t)(l-t) 2 and P 5 (t) = t 2 (1-2t)(l-t)
are both positive for 0 < t < 1/2 and both negative for
0 < t < 1. Then for xi ~ x ~ xi+l' we have
(4.3.6) jLi[f,x]-s(x) I .s_
hi max ( I e ' (xi) I , I e ' (xi+ 1 ) I } I t ( 1- 2 t) ( 1-t) I •
Redefine L so that its restriction to [xi, xi+ll is Li for
each i, i = 0, 1, •• ,k-1. Choose i so that je'(xi) I is
maximal. We then have for all a< x < b,
71
(4.3.7) IL[f,x] - s{x) I ~ h le' (xi) I Jt(l/2-t) (1-t) I
where h = max 0~j~k-lhj is the maximal subinterval length
and where on each subinterval [xj, xj+l], 0 ~ j ~ k - 1,
we define t = (x - xj) /hj.
The next task is to bound I e' (xi) I - From both sides
of (4.1.4) we subtract
-hi f' (xi-l) + 4(hi + hi_ 1 )f' (xi) - hi-lf' (xi+ll ,
thereby defining a functional B0 (f)
(4.3.8)
= hi f' (xi-1) - 4(hi+hi-l)f' (xi) + hi-1f' (xi+l)
-11 [(hi-1/hi) - (hi/hi-1)] f(xi)
+ 16 [(hi-1/hi) f(zi+ll - (hi/hi-l) f(zi)]
- 5 [(hi-1/hi) f(xi+ll - (hi/hi-l) f(xi_ 1 )]
=: B0 (f) •
The linear functional B0 (f) is identically equal to
zero when f is a polynomial of degree four or less, as can
be directly verified. (The arithmetic of verification is
simplest if one takes xi-l = -hi-l' xi = O, xi+l = hi and
2 3 4 checks the monomials 1, x, x , x , and x ).
We have chosen i so that le'(xi) I attains its maximum
value. As
4(h• + h- 1 )e'(x•) l 1- l
= -B 0 (fl + hie' (xi_ 1 ) + hi-le' (xi+ll,
it follows that
l4(hi + hi-1) I < IBo(f) I + !hie' (xi-1) I
+ lhi-1e' (xi) I
< IB 0 (f) I + I (hi+ hi_ 1 )e' (xi) I •

72
Hence
and
(4.3.9)
As Bo(f) is a linear functional which is zero for
polynomials of degree four or less, we can apply the Peano
theorem to get
(4.3.10) B0 (f) =
From (4.3.10) follows
xi+l (4.3.11) !B0 (f) I~ f !B0 [(x-y)+ 4 l I dy ui/ 4! •
xi-1
where Ui is the maximum of lf(S) I on [xi-l xi+l].
For xi-l ~ y ~ xi+l' B0 [(x-y)+ 4 l takes the form
( 4. 3 • 12) Bo [ ( x-y) + 4 ] =
- 16 (hi +hi-1) (xi-y) + 3 + 4hi-1 (Xi+l -y) 3
- 11 [ (hi-1/hi) - (hi/hi-l)] (xi - y) + 4
+ 16 [(hi-1/hi) (zi+l-y)+ 4 - (hi/hi-l) (zi-Y)+ 4
- 5 (hi-1/hi) (xi+l - y)4 •
In order to evaluate the integral of (4.3.11) we need
to know the sign behavior of B 0 [(x-y)+ 4 ]. We rewrite
(4.3.12) in a form which shows its symmetry about xi.
(4.3.13) Bo [ (x-y) + 4 J =
(hi/hi-1) [-S(xi-y) + hi-1) [(xi - y) - hi-1]3'
73
(hi/hi-1) (xi-y) 2 [11 (xi-y) 2_ 16hi-l (xi-y)
+ 6hi-l 2] ,
for zi .s_ y .s_ xi
(hi-1/h,) (x--y) 2 [ll(xi•-y) 2 + 16h,(x.-y) l l l l
+ 6hi 2] ,
for xi< y .S. zi+l
(hi-1/hi) [-5(xi-y) - hi] [(xi-y) + hi] 3 ,
for zi+l .S. y .S. xi+l.
As the expression (4.3.13) has factors which are at
most quadratic it is fairly easy to to determine to
determine the sign of B 0 [(x-z)+ 4 ]. In fact, B0 [(x-z)+ 4 1
is nonnegative for i-l .s_ y .S. xi+l" Evaluation of (4.3.11)
is then straightforward. The term by term integration of
(4.3.13) gives
(4.3.14) Xi+l f 1Bo[(x-y)+ 4 11 dy = hihi-l[hi-1
3 + hi
3]/10.
xi-1
From Equation (4.3.11) we conclude that
(4.3.15) IBo(f)I < U, h-h• 1 [h· 13 + h- 3 ] / [2(5!)] •
l l l- 1- l
From (4.3.9) it is then evident that
(4.3.16) le'(xj)I .S.
Ui hihi-l[hi-13 + hi3] /[(6!) (hi+hi-1)]
for j = 1, 2, , k-1. As
and as
ui .s. u ,
it follows that
74
(4.3.17) max le' (xj) I .s_ max(hi 4 , hi_ 14 J U/ (6!) •
This is the desired bound on I e' (xi) I
Applying it in (4.3.7) we have
(4.3.18) IL[f,x] - s(x) I < h 5 it(l-2t) (1-t) I U/ (6!) •
From (4.3.2) follows
(4.3.19) lf(x) - L[f,x] I .s_ h 5 lt 2 (t-1/2) (1-t) 2 I U/ 5!
where L restricted to [xi, xi+l] is defined as Li[f,x] and
where h is the maximum of hi.
We can now combine the bounds on lf(x) - L[f,x] I and
IL[f,x] - s(x) I- From (4.3.19) and (4.3.18), we have
(4.3.20) lf(x) - s(x) I .s_ h 5 lc(t) I u / 5!
where
and
Jc(t) I = j3t2 (1-2t) ((1-t) 21 + jt(l-2t) (1-t) I / 6
= l3t 2 (1-2t) (1-t) 2 + t(l-2t) (1-t) I / 6
c(t) = [3t(l-t) + 1] [t(l-2t)(l-t)] / 6 •
Then
(4.3.21) c 0 = maxO<t<lic(t) I · To verify (4.3.21), note that
(4.3.22) 6c'(t) = -30t2 (t-1) 2 + 1
= -30 [(t - 1/2) + 1/2] 2 [(t - 1/2) - 1/2] 2 + 1
= -30 [(t - 1/2) 2 - 1/4] 2 + 1 ·
For 0 .s_ t .s_ 1, the roots of c' (t) are
(4.3.23) t = 1/2 .:t ✓ 1/4 - 1//30.
Evaluating c(t) at the roots of c' (t), we get
(4.3.24) CQ = ( /1/4 - 1//To) (1/5 + 2//3o) •
75
We have shown the so-called "direct" part of the
proof, that Equation (4.1.7) holds for c0
• It remains to
be shown that the theorem holds for no smaller c0
•
In fact, given c < c0
, we can produce a function f
. . ( }k and a partition xi i=0 of [-1, 1] such that
(4.3.25) max_l<x< 1 1 f (x) - s (x) I >
c h 5 max_l<x<llf(S)(x)j/5!.
Often, when polynomial interpolation of degree n is
considered, the worst error is attained by a polynomial of
degree n + 1. Ass is a quartic spline, it is natural to
try f(x) = x 5 /S! as a possible worst function. A particu
larly pleasant feature of the trial worst function f is
that it has fifth derivative identically equal to one.
For xi< x < xi+l' we have by the Cauchy formula
(4.3.26) x 5 /S! - Li[x 5 /S!,x]
= hi 5 [t 2 (t-1/2)(t-1) 2 J / 5!.
Furthermore, for equally spaced knots xi-l' xi' xi+l' we
can calculate
(4.3.27) 5 _ 5 B0 (x /5!) - hi/ 5! .
If e' (xi_ 1 ) = e' (xi) = e' (xi+ll, we have from (4.3.8)
(4.3.28) e'(xi) = -Bo(x5 ) I 6 = -hi 4 / 6!.
Equation (4.3.3) then becomes for f(x) = x 5 /S!
(4.3.29) Li[f,x] - s(x) ""-hi hi 4 (P 4 (t) + P5 (t)}/6!
= hi 5 [t(2t-1) (1-t) ]/6!
Combining Equations (4.3.26) and (4.3.29), we have,
(4.3.30)
76
f(x) - s(x) = h , 5 [t(t-1/2) (l-t)/3 l
+ t 2 (t-1/2) ( (1-t) 2 } / 5!
As (4.3.30) gives, after taking its absolute value,
precisely our pointwise bound I c (t) I of (4.3.20), we will
have attained c0
, provided only that hi= h, and as men
tioned above,
(4.3.31) e' (xi) = e' (xi+l) = e' (xi_ 1 ) = -h 4 /6!
In order that hi= h, we take the knots to be equally
spaced. Attaining (4.3.31) is not so easy. In fact it is
attained only in the limit. The difficulty is the boundary
conditions e' (x 0 ) = e' (xk) = O. We can show, however,
that as one moves many subintervals away from the
boundaries, e' (xi) goes to -h4 /6!.
Explicitly, let (xi}t=o be the partition dividing
(-1,1] into k equal subintervals; in this case, h =hi=
2/k. For i = 1, 2, ••• , k - 1, and f = x 5 /S!, we have
Bo(f) defined on [xi-l' xi+l] and
(4.3.32) Bo(f)/h = h 4 /S! = e' (xi-l) - Se' (xi) + e' (xi+l)
We wish to apply (4.3.32) inductively to move away
from the end conditions e' (-1) = e' (1) = O. In order to
do so we must establish that e' (xi) ~ 0 for O < i < k. We
reason by contradiction.
Let 1 < i < k - 1. Suppose e' (xi) > O. Then
e'(xi-1) + e'(xi+l) >
e'(xi_ 1 ) - 8 e'(xi) + e'(xi+ll
> h 4 /5!

77
Hence
max ( I e ' (xi_ 1 ) I , I e ' ( xi+ 1 ) I } > h 4 / [ 2 ( 5 ! ) 1 ,
contradicting the fact (4.3.17) that
h 4 / 6 ! > max ( I e ' ( xi_ 1 ) I , I e ' ( xi+ 1 ) I } • We have shown by assuming the contrary that
e' (xi) < 0 for i = 1, 2, •• , k - 1 •
Condition (4.1.3) is that e' (x 0 ) and e' (xk) are zero. Thus
(4.3.33) e'(xi) < 0 for i = 0, 1, •• , k.
and
Applying (4.3.32) again we have for i = 1, 2, •• , k - 1
Se' (xi) = -h4 /5! + e' (xi_ 1 ) + e' (xi+l) •
Ase' (xi_1 ), e' (xi+ll < 0, this implies that
Se' (xi) ~ -h4 /5!
(4.3.34) e' (xi)~ -h4 /[8(5!)] •
Similarly, for i = 2, 3, •• , k - 2, we have
Se' (xi) = -h4 /5! + e' (xi_ 1 ) + e' (xi+ll ,
and hence by (4.3.34),
e' (xi) < -h4 /5! - h 4 / [8 (5!)] - h 4 / [8 (5!)]
= -(1 + 1/4) h 4 /[8(5!)] •
Inductively, for i = j to i = k - j, we will have
e'(xi) < -(1 + 1/4 + 1/4 2 + • + l/4j-l}h4 /[8(5!)].
2 The harmonic series (1 + 1/ 4 + 1/ 4 + • . • is
equal to 1/(l - 1/4) or 4/3. Thus, in the limit as i, k,
and j go to infinity, we have
(4.3.35) e' (xi) ~ -(1/8) (4/3)h 4 /5! = -h 4 /6! •
We already know from (4.3.17) that ie'(xi) J ~ h 4 /6!. Thus
fork> 2j + 1, and k - j > i > j as j goes to infinity,

78
we have
{4.3.36) e' {xi) goes to -h4 /6! •
In the sense of (4.3.36), (4.3.31) is satisfied.
Then, goes x 5 /5! - s {x) goes
uniformly to the expression of (4.3.30) and (4.3.20) with
h = h ·• l It follows that the expression of (4.3.20)
cannot be improved further. In fact we have shown that
!c(t) I offers a pointwise exact bound, and its maximum c0
is the exact norm bound.
Proof of Theorem 4.2
We know from {4.3.1) that for xi < x .S. xi+l'
(4.4.1) s{x) - f{x) = P1 {t) f(xi) + P2 (t) f(zi+ll
+ P 3 (t) f{xi+l) + hi P 4 (t) s'{xi)
+ hi P 5 {t) s' {xi+l) - f(x) •
It is easily verified that P 1 (t) + P 2 (t) + P 3 {t) = 1.
Thus
(4.4.2) s(x) - f(x) = P1 (t) [f(xi) - f(x)]
+ P 2 (t) [f(Zi+l) - f{x)]
+ P 3 (t) [f{xi+l) - f(x)]
+his' {xi) P 4 (t)
+ hi s' {Xi+l) P 5 {t) •
Each of the first three terms on the right hand side
can be bounded in absolute value by (f,h). We also must
bound the last two terms. For equally spaced knots h = hi
= h • 1• i-, equation {4.1.4) reduces to
(4.4.3)
79
-h s'(xi_1 ) + 8h s'(xi) - h s'(xi+ll
= 16 [f(zi+l - f(zi)]
- 5 [f (xi+ll - f (xi_ 1 )] •
Assume s'(xi) is maximal in absolute value. Then
and hence
(4.4.4)
l6h s' (xi) I < 16 !f(zi+l) - f(zi)] I
+ 5 !f(xi+l) - f(xi) I
+ 5 !f(xi) - f (xi_ 1 ) I
< 26W(f,h),
lh s' (xi) I ~ (13/3) w (f,h) .
Combining (4.4.2) and (4.4.4), we have
(4.4.5) !s(x)-f(x) I~ [!P1 (t) I + IP 2 (t) I + IP 3 (t) I
+ (13/3)IP4(t)I + (13/3)IP4(t)!}W(f,h)
For O < t < 1/2,
(4.4.6) IP1 (t) I + IP2 (t) I + IP3 (t) I
+ (13/3)jP4(t)! + (13/3)IP4(tll
= P1 (t) + P2 (t) - P3 (t) +
(13/3)P4 (t) + (13/3)P 5 (t)
= 1 + (13/3)t - 3t2 - (58/3)t 3 + 16 t 4 .
We have shown the theorem for O < t < 1/ 2. The
argument for 1/2 ~ t ~ 1 is symmetric.
Proof of Theorem 4.3 We are considering now the case in
which knots are no longer assumed to be equal. We assume
that the ratio of the longest subinterval to the shortest
is less than m. Equation (4.4.2) still applies. Again we
choose i so that Is' (xi) I is maximal. From (4.1.4) we now
have

(4.4. 7)
Then
80
-his' (xi-1) + 4(hi+hi-1) s' (xi) - hi-ls' (xi+l)
= -11 [(hi-1/hi) - (hi/hi_1 )] f(xi)
+ 16 [ (hi-1/h ·) 1 f(zi+l) - (hi/hi-1) f (zi)]
- 5 [ (hi-1/h · ) f (xi+l) - (hi/hi-1) f(xi-1)] 1
= ll[hi/hi_1 ] [f(xi) - f(zi)]
+ 5[hi/hi-1] [-f(z•) + f(xi-1)] 1
+ ll[hi-1/hi] [f(zi+l) - f(X·)] l
+ 5 [hi-1/h ·] [f(zi+l) - f (Xi+l)] l
3 (hi + hi_ 1 ) Is' (xi) I < 16 hi/hi-l w (f, hi_ 1 /2)
+ 16 hi-1/hi w(f,hi/2)
and
ls'(xi)I < (16/3) [hi/hi-l + hi-1/hi] w (f,h)
h · + h· l 1 1-
where h = maxO<i<k-lhi.
Then for any given j, 0 .s_ j .s_ k-1 , and
m = max(hi}/(mini}, i = 0, 1, ••• , k - 1, we have
(4.4.8) rnax(lhj s'(xj)I, jhj s'(xj+illJ
< (16/3) h (m + 1/m) w (f,h) 2min[hi}
< (8/3) (m 2 + m) w (f,h) •
Substituting (4.4.8) into (4.4.2) yields the result
of the theorem.

CHAPTER FIVE IMPROVED ERROR BOUNDS FOR THE PARABOLIC SPLINE
Introduction and Statement of Theorems
The quartic splines of Chapter Four share and improve
many of the properties of the complete cubic spline. To
insure a good approximation to a given continuous
function, we must make the largest subinterval of a
partition small. Unfortunately, we must also pose some
additional restrictions on the partition. For instance,
in Theorem 4.3, the norm of the error depends not only on
the length h of the largest subinterval but also on the
ratio m of the largest to smallest length subinterval.
Similar additional restrictions must be made for the cubic
spline.
In this chapter, we will discuss a spline operator
for which the norm of the approximation error goes to zero
with the length of the largest subinterval, for any par
tition and any continuous periodic function. This spline
is the piecewise parabolic spline introduced by Marsden
and discussed in Chapter One. Its properties are
summarized in Equations (1.6.1) to (1.6.7).
As Marsden points out, many of the bounds he gives
can be sharpened. The main result of this chapter will be
to accomplish this sharpening. While many of the bounds
81
82
given here may still not be exact, at least one of them
is, and in fact is even pointwise exact. In other cases we
can reduce the known bounds by a factor of more than two.
The results given here thus enable one to compare the
error of the Marsden spline to the error of other spline
interpolation processes. Specifically, future work on the
cubic spline interpolant should shed light on the validity
of Marsden's conjecture that the parabolic spline offers
better approximation than the cubic spline when functions
of the classes c(l), c( 2 ), and c( 3 ) are considered.
We first recapitulate the properties of the parabolic
spline. Let
f e C[a,b] f(a) = f(b)
I If I I = sup ( If (x) I a<x<b}
such that f is extended periodically with period b - a.
A function s(x) is defined to be a periodic quadratic
spline interpolant associated with f and a partition
( }k i· f xi i=O
(5.1.1)
a) s (x) is a quadratic expression on each (xi-l' xi)
b) s(x) ec'[a,b];
c) s (a) = s(b) s'(a) = s'(b);
i = 1, 2 •• , k
where zi+l = (xi+l+xi)/2.
The following theorem is due to Marsden [1974] and
was given in Chapter One as Theorem 1.13.

83
Theorem Let (xiJ1=o be a partition of [a, b], f(x) be a
continuous function of period b - a, and s (x) be the
periodic quadratic spline interpolant associated with f
and (xiJf=o· Then
(5.1.2) !!sill< 2 lltll,
I lei! I < 2 W(f ,h/2) ;
lie II< 3 w(f,h/2).
11s1I < 2 11£11;
(where S· = S(X·) and e- = y(x•) - S(X·) ). l l l l l
The constant 2 which appears in the first of the above
equations can not, in general, be decreased.
For continuous functions to be "well-approximated" by
the spline s, Equations (5.1.2) show that the only
requirement for the partition is that the length h of the
largest subinterval be small enough that the modulus of
continuity off be small.
Concerning s, we can prove the following results.
These are analogous to the results of Marsden given above
as Theorems 1.14 to 1.16 and improve upon the bounds he
derived.
Theorem 5.1 Let f and f' be continuous functions of period
b - a. Then
(5.1.3) lle(x)II .s_c 0 , 1 h 11£'11,
where a 0 = 2/3 - nJ/6 and c 0 , 1 = 1 + a 0 - 8a 02 + 4a 0
3 or
c 0 , 1 is approximately 1.0323. The analogous constant from
Marsden was 5 / 4.
84
Theorem 5.2 Let f, f', and f" be continuous functions of
period b - a. Then
(5.1.4)
(5.1.5)
(5.1.6)
I Jell~ (1/6) h 2 llf"JI,
llei'II ~ (9/16) h llt"ll,
lle'II ~ (17/16) h 11£"11 • (Marsden's constant for (5.1.4) was 5/8, while in (5.1.6)
the value was 2).
If we make the additional assumption that the
partition consists of equally spaced intervals, then we
can improve (5.1.6) to
(5.1. 7) ile'II < .7431 h 11£"11 • Theorem 5.3 Let f, f', f", and f"' be continuous
functions of period b - a. Then
(5.1.9) Jleill ~ (1/24) h 3 llf'''II,
(5.1.10) llei'II ~ (1/6) h 2 llf"'ll,
(5.1.11) I/ell~ (1/24) h 3 Jlf'''II,
(5.1.12) Jle'II ~ (7/24) h 2 llf'''II,
(5.1.13)
I Je"I I< [hi/2 + (h3 /3hi 2 )] I If"'! I , xi_ 1 <x<xi.
Marsden's analogous constants for (5.1.9) to (5.1.11)
are 1/8, 1/3, 17/96, and 11/24 respectively.
Furthermore, (5.1.9) and (5.1.11) are best possible.
In fact we also have the exact pointwise bound
(5.1.14) Je(x) I ~ JE 3 (t) I h 3 I Jf' '' 11, xi~ x < xi+l ,
where t = (x - xi)/(xi+l - xi) and
Q3(t) = 1/24 - t 2 /4 + t 3 /6
is the "Euler spline" of degree 3.
85
The technique used here is the same as that used in
the last chapter. For a given partition subinterval
(5.1.15) if(i)(x) - s(il(x)I < if(il(x) - L{il(x)I
+ IL(i) (x) - s(i) (x) I
-where Lis a polynomial interpolation of f. We then
proceed by obtaining pointwise estimates of the quantities
on the right hand side of (5.1.15).
Proof of Theorem 5.1
Given that f and f' are continuously differentiable
of period b - a, we will establish the following pointwise
bound for the parabolic continuously differentiable spline
s interpolating function values at subinterval midpoints
Then for xi< x < zi+l' we have
(5.2.1) If (x) - s (x) I _s. h [1 + t - 8t2 + 4t3 ] lit' 11 For zi+l < x < xi+l replace t in (5.2.1) by 1 - t.
Equation (5.1.3) follows from (5.2.1).
In order to establish (5.2.1) we write for
f(x) - s(x) = f(x) - L(x) + L(x) - s(x)
where L(x) is the parabola matching f(xi), f(zi+l), and
f(xi+ll. Then
(5.2.2) /f(x) - s(x) l < /f(x) - L(x) l + /L(x) - s(x) I •
86
We can represent L(x) as
(5.2.3)
where t = (x - x , )/h• and l l
Ao ( t) = 2 ( 1 / 2 - t) ( 1 - t) ,
A1 (t) = 4t (1 - t) ,
A2 (t) = 2t (t - 1/2)
As L reproduces parabolas exactly and as the restriction
of s(x) to [xi, xi+ll is a parabola, for xi~ x ~ xi+l we
have
(5.2.5) IL(x) - s(x) I ~ Jf(xi) - s(xi) I IA 0 (t) I
+ Jf (xi+l) - s(xi+ll I JA 2 (t) I
< [ JA0 (t) I + JA2 (t) I } I Jeil I
< I 1 - 2t I I I ei 11
where I lei! I = maxl<i<kJf(xi) - s(xi) I
We have shown that
{5.2.6) Jf(x) -s(x)I <
Jf(x) -L(x)J + Jl- 2tl lleill •
It remains to bound Jf(x) - L(x)I and lleill in terms of
I If I I I •
Marsden showed that
(5.2.7)
where his the maximum length of a subinterval.
In order to bound If (x) - L {x) I we resort to the
Peano theorem. Defining g{t) =: f{xi+hit) = f(x), we have
87
1 (5.2.8) f(x) - L(x) = f K1 (t,z)g' (z)dz
0 where
and
K1 (t,z) = (t-z)2 - A0 (t) (O-zJ2
(t-z)Z =
- A 1 (t) [1/2 - z]~
- A 2 ( t) [ 1 - z] 2
1 fort> z
O fort< z .
In order to verify (5.2.8), one need only expand the right
hand side and integrate by parts. For O < t < 1 / 2,
K1 (t,z) may be written in the more convenient form
From
(5.2.9)
K1 (t,z) = -A1 (t) - A2 (t) + 1 for 0 < z < t - -
= -A 1 (t) - A 2 (t) for t < z < 1/2 -
= -A 2 (t) for 1/2 < z < 1 - -Equation (5.2.8) it follows that
1 !f(x) - L(x)! < J !K 1 (t,z)!dz maxO<t<llg'(t)I
0
1 < hi J !K1 (t,z) !dz maxx <x<x If' (x) I
O i- - i+l
1 < hif IK1(t,z)ldz llf'I!.
0
Evaluating the integral in (5.2.9), we have
1 (5.2.10) f I K1 (t,z) !dz = t [1 - A 1 (t) - A 2 (t)]
0 + (1/2 - t) [A1 (t) + A 2 (t)]
+ (1 - 1/2) [-A2 (t)]
= 3t - Bt 2 + 4t 3 .

88
Combining Equations (5.2.7)-(5.2.10) we have for
0 < t .s_ 1/2,
(5.2.11) lf(x) - s(x)I < (h (1 - 2t) +
hi (3t - 8t 2 + 4t 3 ) J
< h [1 + t - 8t2 + 4t 3 ]
I If' 11
I If I 11
which is precisely the desired result. The maximum of the
right hand side of (5.2.11) occurs for a 0 = 2/3 - 13/6.
Evaluating gives the value c 0 , 1 •
Proof of Theorem 5.2
Let f be twice continuously differentiable of period
b - a and let a partition
a = XO < z 1 < X 1 < • • Xi < z i + 1 < Xi+ 1 <. • < xn = b
be given (where zi+l =(xi+ xi+l)/2, every i). Lets be
continuously differentiable and a parabola on each
interval [xi, xi+ll such that
s ( z i + 1 ) = f ( z i + 1 ) , s (a) = s ( b) , and s' (a) = s' ( b) •
Letting t = (x - xi)/hi, we show that
(5.3.1) lf(x) - s(x) I .S. c 0 , 2 (t) I If'' I I c 0 , 2 (t) = h 2 ((1 - 2t)/6 + [ t/(3 - 2t) - t 2 JJ
and for Zi+l .s. X .s. Xi+l
c 0 , 2 (t) = c 0 , 2 (1-t) •
Furthermore the maximum of c 0 , 2 (t) is 1/6 and occurs
fort= O and 1.
As in the proof of Theorem 5.1 we fix i and let L (x)
be the parabola satisfying
89
L(X·)=f(X · ) , l l
Then, proceeding in the same way as before,
(5.3.2) if(x) - s(x) I < if(x) - L(x) I + I lei\ I 11 - 2t\ •
We must bound If (x) - L (x) I and 11 ei I I• We first
bound 11 ei 11- From Marsden [1974], we have
(5.3.3) h, Si· -1 + 3(h • + h • 1l S· + h• l S · l l l 1- l 1- l+
Denoting fi = f(xi)
Equation (5.3.3)
and e. = f. - s. , l l l
we obtain from
(5.3.4) hi ei-1 + 3 (hi + hi-1) ei + hi-1 ei+l
= hi fi-l - 4 hi f(zi) + 3(hi + hi-l) fi
- 4 hi-1 f{zi+l) + hi-1 fi+l
-. B{f) •
As Bis identically zero for any linear function f,
we have by the Peano Theorem:
(5.3.5)
where
and
B ( f) = fxi+lK(y) f'' {y) dy / l!
xi-1
K (y) = Bx [ (x-y) +1
+ h• (x. 1 - Y)+ l i-
X - y for X > (x - y) + =
0 for X <
y
y .
90
In order to illustrate the symmetry of the kernel
K(y) about xi, we expand in terms of y - xi to obtain
K(y) = hi-1 [hi - (y-xi)]
for hi/2 < y-xi < hi
= hi-1 [3(y-xi) - hi]
for O < y-xi < hi/2
= hi [-3(y-xi) - hi-1]
for -hi_ 1 ;2 < y-xi < 0
where h. = x. 1 - x • and h • 1 = x · - x • 1 . l l+ l l- l l- As is easily
seen, the sign of K(y) changes at y = x i+ hi/3 and
xi - hi-1/3.
From (5.3.5), it follows that
(5.3.6) lhl• ei•-1 + 3(hl• + hi•-1) e- + h- 1 e- 11 l l- l+
< Xi+l J JK(y) I dy I If II 11
xi-1
< (hi+ hi-1) hi hi-1 J if'' I l/ 3 •
Let i be such that Jeil = I Jeil J. Then
(5.3.7) lleill ~ (1/6) h 2 llf"II,
which is the desired bound on I Jeil J.
We next bound jf(x) - L(x) J where Lis the parabola
matching f at xi, zi+l' and xi+l" L can be uniquely
expressed as
(5.3.8)
where
L(x) = f(xi) Ao(t) + f(zi+l) Al (t)
+ f( x i+l) A2 (t)
91
Ao ( t) = 2 ( 1 / 2 - t) ( 1 - t) ,
Al (t) = 4t (1 - t) ,
A2 (t) = 2t (t - 1/2)
Then, defining g(t) =: f(xi+hit) = f(x) we have
1 (5.3.9) f (x) - L(x) = J K2 (t,z) g'' (z)dz , t = (x-xi) /hi
0
where
K2 (t,z) = (t - z)+ - A0 (t) [O-z]+
- A1 (t) [1/2 - z]+ - A2 (t) [1 - z]+ •
Equation (5.3.9) can be verified by integrating by parts
to obtain (5.2.8). For O ~ t ~ 1/2, K2 takes the form
(5.3.10) K2 (t,z) = z (2t - 1) (1 - t) for t > z, t ~ 1/2,
- t [ 1 + z ( 2t - 3) ] fort< z < 1/2
- t (2t - 1) (1 - z) for z > 1/2, t < 1/2
From (5.3.9), it follows that for O < t < 1/2
1 (5.3.11) if(x) - L(x) Iii lg'' (t) 11 < J !K 2 (t,z) !dz -
0
X
= - J z(2t -1) (1 - t) dz 0
l/(3-2t) - J -t[l + z(2t - 3)] dz
X
1/2 + J -t[l + z(2t - 3)] dz
1/ (3-2t)
1 J 2t(t - 1/2) (1 - z)dz 1/2
= -t2 + [t/(3-2t)] .
92
Therefore , if O ~ t ~ 1/ 2, we have
(5.3.12) if(x) - L(x) Ii hi 2 [-t 2 + [t/(3-2t)]}j jf" (x) I I
We can now assemble the parts to get the pointwise bound
(5.3.1). Using the bound for if(x) - L(x)I of (5.3.11)
and the bound of (5.3.7) for I jeil I in the formula
lf(x) - s(x) I < if(x) - L(x) I + I leil I 11 - 2tl ,
we then have for O <ti 1/2,
(5.3.13) lf(x) - s(x)I i ( hi 2 [-t 2 + t/(3-2t)]
+ (1 - 2t) h 2 /6} llf"II
which, as hi i h, immediately implies (5.3.1). The result
for 1/2 < t ~ 1 follows by symmetry. It remains only to
be shown that the maximum of
O < c0
, 2 (t) = h 2 ((1 - 2t)/6 + [ t/(3 - 2t) - t 2 J}
is h 2 /6 and occurs fort= 0. To see this, expand c 0 , 2 (t)
at Oas
Co,2(t} = Co,2(Q) + t Co,2' (Q) + (t2/2) Co,2' I (y)
where O < t < 1/2 and O ~ y it. It is not hard to
verify that the last two terms of the above expression are
negative, and hence the maximum occurs at t = 0. This
completes the proof of Equation (5.1.4).
We next show Equation 5.1.5. From Marsden, we have
the tridiagonal system matching spline derivatives,
(5.3.14) h- l Si·-1' + 3(h - + h- 1l S·' + h- S · 1' l- l l- l l l+
or equivalently,

(5.3.15)
where
and the
93
h. 1 e • 1 ' + 3 (h. + h • 1 ) e • ' + h • e • 11
l- l- l l- l l l+
=: B1 (f).
B1 [ (x-y) +1 = h-l
= 8 (y-xi) - 3h-l
= 8(y-xi) + 3h - l i-
= -h. 1-l
last equality of (5.3.15)
2 i+l
X· l <
Z· l <
xi-1
can be
f. I l
.s_ y .s_ Xi+l
y < 2 i+l
y < X· l
<y < - z. l
verified by
integrating by parts and using the fact that B 1 is
identically zero if f is a linear function. From (5.3.15)
follows
(5.3.16) lh • le - 1 • + 3(h• + h, 1 ) e-' + h• e - 1 '1 l- 1- l i- l l l+
Xi+l < f I B 1 [ ( x-y) + 1 I dy I I f ' ' I I
xi-1
< (9/8) 2 2 (h · + h · l ) l l- 11£"11,
and hence
(5.3.17) llei'II .S. (9/16) h i!f"II,
which is precisely (5.1.5).
We next establish a pointwise bound on le'(t) I• We
show that for xi .S. x .S. xi+l' and t = (x - xi)/hi,
(5.3.18) lf'(x) - s'(x)I .S. ((9/16)h
+ 2 hi t(l - t)} llf"II.

94
If we maximize the right hand side of (5.3.18) by taking
hi = h and t = 1/2, then (5.1.6) is an immediate
consequence of (5.3.18).
To establish (5.3.18), we let J(x) be the unique
parabola satisfying
(5.3.19) = f I ( X. ) , ].
Then
and
J'(x• 1)= ].+
J' (x) - s' (x) = ( 1 - t)
(5.3.20) If' (x) - s' (x) I
e, I + ].
< lf'(x) - J'(x)I + IJ'(x) - s'(x)I
< lf'(x) -J'(x)I + llei'II (11-tl + lti}
< lf'(x) - J'(x)I + llei'II
As we already have an estimate for 11 ei' 11, we need
only estimate If' (x) - J' (x) I•
integration by parts that
1
It is easy to see by
(5.3.21) f' (x) - J' (x) = J K(t,z)g'' (z)dz / hi 0
where g(t) =: f(xi+hit) = f(x) and where
K ( t, z) = 1 - t for t > z
- t fort< z
From (5.3.21) follows
1 (5.3.22) lf'(x) - s'(x)I ~ f IK(z,t)idz llg''II / hi
0
and evaluation of (5.3.22) gives

95
(5.3.23) If' (x) - J' (x) I ~ hi 2t (1 - t) I If'' 11 .
Applying (5.3.23) and (5.3.17) in (5.3.20) gives
(5.3.24) If' (x) - s' (x) I ~
(hi 2t (1 - t) + (9/16) h } llf" 11 '
which is the desired pointwise bound.
In order to improve the bound for the case of evenly
spaced knots we return to the use of the parabola L
satisfying
L(xi) = f(xi), L(zi+l) = f(zi+ll ,
L(xi+ll = f(xi+l) •
Then for arbitrary i and xi< x < xi+l' we have
(5.3.25) If' (x) - s' (x) I
< lf'(x) - L'(x)I + IL'(x) - s'(x)I
< lf'(x) - L'(x)I
+ (1/hi) I ei Ao' (t) + ei+l A2' (t) I
< lf'(x) - L'(x)I
+ ( I ieil I/hi) ( !Ao' (t) I + IA2' (t) I}
where t = (x-xi)/hi. Differentiating equations (5.3.8)
gives
(5.3.26) I Ao' ( t) I = /3 - 4t/ I
I A2 I (t) I = 11 - 4t/
Recalling from Equation (5.3.7) that
I I ei 11 < (1/6) h2 !If"!/ I -we have
(5.3.27) /f'(x) - s'(x)/ ~ lf'(x) - L'(x)I
+ (h 2 /6hi) (/A 01 (t)/+/A2'(t)/} llf"i!
where

96
JA0 '(t)i + JA 2 '(tli = 4 - st, 0 < t < 1 / 4 - -= 2 1/4 < t < 3/4
= 8t - 4 , 3/4 < t < 1
To obtain a pointwise bound we need only bound
jf' (x) - L' (x) j. Differentiating (5.3.9), we obtain
(5.3.28) jf' (x) - L' (x) I .s_
h • l
1 J jK
2(l,O)(t,z)jdz jjf''(x)jj
0
where for O < t < 1/2
K2
(l,O) (t,z) = z(3 4t) t > z
- 1 + z(3 - 4t) t < z < 1/2
(1 - 4t) (1 - z) , 1/2 < z < 1 •
The only sign changes occur for z = 1/(3 4t) and
0 < t < 1/4 and along the lines t = 1/4 , z < 1/2, and
z = t. Evaluating the the integral of (5.3.28) for
0 .s_ t .s_ 1/4 then gives
(5.3.29) t 1
J I K2
(l,O) (t,z) jdt =
0 J z(3 - 4t)dz 0
1/ ( 3-4t) - J [-l+z(3-4t)]dz
t
1/2 + f [-l+z(3-4t)]dz
l/(3-4t)
1 +J (1-4t)(l-z)dz
1/2
= t 2 (3 - 4t) - 2t + 1/(3 - 4t) •
For the interval 1/4 < t < 1/2, the only sign change
is the 1 ine z = t. We obtain
{5.3.30)
97
1 X
f JK 2 {l,O) (t,z) ictt ==
0 J z(3 - 4t)dz 0
1/2 f [-1 + z(3-4t)]dz X
1 f {l - 4t) (1 - z)dz 1/2
= t 2 (3 - 4t) •
The expression of (5.3.30) is monotone increasing for
1/4 < t < 1/2. We have shown that
{5.3.31) if'(x) - L'(x)J/llf"II
<
hi (t 2 (3 - 4t) - 2t + 1/(3-4t)} ,
0 < t < 1/4
h · t 2 (3 - 4t) , l
1/4 < t < 1/2 .
Combining (5.3.27) and (5.3.31) we have
(5.3.32) if'(x) - s'(x)J!llf"II <
hi[t 2 (3-4t) - 2t + 1/(3-4t)]
+ (h 2 /3hi) (2-4t) ,
0 < t < 1/4
1/4 < t < 1/2 •
As usual these results can be extended by symmetry to
the interval 1/2 ~ t < 1. The bound given in (5.3.32) is
monotone decreasing from Oto 1/4 and increasing from 1/4
to 1/2. For an equally spaced partition, and t near 1/2,
(5.3.32) is quite a bit smaller than (5.3.23). For
instance for t = 1/ 2, we have 1/ 3 + 1/ 4 versus 1 7 / 16 from
(5.3.23). If we rewrite (5.3.23) as

98
(5.3.33) lf'(x) - s'(x)I < c 2 , 1 (t) llf''II
where
c2 , 1 (t) = hi 2t (1 - t) + (9/16) h
and write (5.3.32) as
(5.3.34) If' (x) - s' (x) I ~ c 2 , 1 (t) I If'' 11
where c 2 , 1 (t) is the right hand side of (5.3.32), then we
have also the pointwise bound
(5.3.34) lf'(x) - s'(x)I ~
min(c 2 , 1 (t), c 2 , 1 (t)) llf"II.
For h = h-, the maximum of the right hand side of (5.3.34) l
is approximately .7431 h I Jf" 11 and occurs for t
approximately equal to .10038.
This completes the proof of Theorem 5.2.
Proof of Theorem 5.3
We first show that if f, f', f", and f'" are
continuous and of period b - a, then
(5.4.1) llf - s!I < (1/24) h 3 llf"'II wheres is the parabolic and periodic (once differen
tiable) spline interpolating subinterval midpoints.
Furthermore, "1/24" cannot be improved.
We proceed by demonstrating (5.1.14). For a given
partition and subinterval [xi, xi+ll, we write
(5.4.2) Jf(x) - s(x) I < Jf(x) - L(x) I + JL(x) - s(x) I where L(x) is the unique parabola satisfying
(5.4.3) L(xi) = f(xi) , L(zi+ll = f(zi+ll ,
L(xi+ll = f(xi+l)
99
L(x) may be uniquely
expressed as
(5.4.4)
where t
L(x) = f(xi) A0 (t) + f(zi+l) A1 (t)
+ f(xi+l) A 2 (t)
= (X - X · ) /h · , l l
A0 (t) =
A1 (t) =
A2 (t) =
and
2(1/2
4t(l -2t(l/2
- t) (1 - t) ,
t) ,
- t)
Proceeding by using the Cauchy formula one obtains
(5.4.5} if(x) - L(x) I ~
(1/6) lt(l/2 - t)(l - t)i IJf'''li •
In order to bound
(5.4.6) IL(x) - s (x) I = [f(xi) - s(xi)] A0 (t)
+ [f (Xi+l) - s (Xi+ll] A2 (t)
< lleill [ JAo(t)J + IA2(t)I J
= I ieil I 11 - 2tl ,
we must bound J JeiJ I = maxj=l, 2 •• ,k(lejlJ where
ej = f(xj) - s(xj). To bound I Jeil I, we resort in turn to
the tridiagonal system of (5.3.4),
(5.4. 7) h• ei-1 + 3(h · + hi-1) e- + h • 1 ei+l l l l 1-
= h-f• l - 4h. f (z.) + 3(h • + h • 1 ) f · l 1- l l l 1- l
- 4hi_ 1f(zi+ll + hi-lfi+l
- . B1 (f)
B1 (f), so defined, is a linear functional identically
zero for polynomials of degree two or less. We thus have
(5.4.8)
where
B1(f) = JXi+lK(y)f"' (y)dy / 2!
xi-1
Then
100
K (y) = Bl [ (x-y) + 2 ]
= hi-1 [xi+l - y]~ - 4hi-1 [ zi+l - y]~
+ 3(h• + h, 1 ) [x• - yJ+ 2 J. i- l
- 4hi [zi - y]i + hi-1 [xi-1 - y]~
2 = hi-1 [hi - (y-xi)] , hi/2 ~ y-xi ~ hi
2 2 hi-1 [hi - (y-xi)] - 4hi-1 [hi/ 2 - (y-xi)]
0 ~ y-xi < hi/2
-hi[hi-1 + (y-xi)2] + 4hi[hi-1/2 + (y-xi)]2 ,
-hi-l/2 ~ y-xi ~ 0
(5.4.9) lh•e • 1 + (h• + h • 1 )e • + h, 1 e - 1 1 l l- l J.- l J.- l+
Xi+l < f I K ( Y) I dy I If' ' ' I I / 2 !
xi-1
= (1/12) (hi-lhi 3 + hihi-13
) llf"'II
If we take i so that lei! is maximal, then we have
(5.4.10) 2(hi + hi_ 1 ) I lei! I <
= (1/12) (hi-lhi 3 + hihi-1 3 ) llf"'II
and hence
(5.4.11) I lei! I
< (1/24) (hi-lhi 3 + hihi-1 3 )/(hi+hi-l) I If"' 11
< (1/24) h 3 llf"'II ·
Combining (5.4.6) and (5.4.11), we have
(5.4.12) lf(x) - s(x) I ~ lf(x) - L(x) I + I lei! I 11 -2tl
< [jt(l/2-t)(l-t)j/6 + {1/24)jl-2tj}h3 11f"'II
= IQ3(t)I h 3 llf"'II
where Q3(t) is the Euler spline of degree three. Equation
101
(5.4.12) is precisely (5.1.14).
(5.1.9) and (5.1.11).
From it follow also
To see that (5.1.14) cannot be improved, consider the
"Euler spline" Qn(x) constructed by integrating a constant
n times so that the nth integration is odd for n odd and
even for n even. On the unit interval, the first few
Euler splines are
(5.4.13)
Ql(X) = X - 1/2 ,
Q2 (x) = x 2 /2 - x/2
Q3(X) = x 3 /6 - x 2 /4 + 1/24 . These can be compared to the even Euler polynomials given
in Chapter Two.
If we extend the Euler splines to the real line by
setting
( 5. 4 . 14) Qn ( x) = ( -1) j Qn ( t + j )
0 < t < 1 and j integer, then Qn(x) is n - 1 times
continuously differentiable and piecewise n times
continuously differentiable. Qn is of period 2 and has
nth derivative of plus or minus one. Q is thus a member n
of the class of functions with nth derivative piecewise
differentiable. The third derivative of o3 can be repre
sented as the pointwise limit of the the third derivative
of a sequence [fi} of three times continuously differen
tiable functions which converge uniformly to o3. Further
more each of the fi have third derivative bounded in
absolute value by one.
102
Restricting Q3 (x) to any interval [0, 2k], consider
the once continuously differentiable splines parabolic in
each interval [i, i+l], and satisfying
(5.4.15) S(Zi+l) = O3(Zi+l) = 0 ,
s(0) = s(2k) , s' (0) = s' (2k)
The spline s thus defined is identically zero. It is not
hard to see that the maximum error occurs at the integer
knots and is 1/24. In fact we have shown that Q3 (x) is
actually a pointwise exact bound.
We next demonstrate Equation (5.1.10),
(5.1.10) llei'II i (1/6) h 2 llf"'II ,
uses the same functional B1 that we used in proving
(5.1.5). As in that case we have
f. I l
which is identically zero for all polynomials of degree
two or less. Hence
(5.4.17) IB1(f)I <
where
+ 6(h· + h, 1 )(y-x-) l 1- l +
+ 2h , 1 (y-x. 1 ) 1- 1- +
---- - ------ ---- --- - - - - - - - - - -
103
= 2h - 2 - 2h · (y-x-) l l l
hi/2 ~ y-xi < hi
2 6hi(y-xi) - 8(y-xi) ,
0 ~ y-xi ~ hi/2
-6hi-l(y-xi) - 8(y-xi)2 ,
-hi_ 1 /2 ~ y-xi < 0
2 2hi-1 + 2hi-1 (y-xi) ,
-hi-1 ~ y-xi ~-hi-1 12 •
Conveniently, the above kernel is positive. Evaluation of
the integral in (5.4.17) is thus straightforward, leading
to
(5.4.18) lhi-1 ei-11
+ 3 (hi + hi-1) ei' + hi ei+l1
I
< (1/3) (hi 3 + hi-1 3 ) I If' 11
) I-Assuming that i is such that lei'I attains its maximum we
then have
3 3 (5.1.10) 11ei 1 11 < (hi + hi-1 ) I If I I I 11
6 (hi+ hi-1)
~ (1/6) h2 I If' II II .
In order to extend the bound (5.1.10) to the entire
interval, choose any subinterval [xi, xi+l] of the given
partition and consider the line J' interpolating fi' and
fi+l'· J' may be represented as
(5.4.19) J' (X) = (1 - t) fi' + t fi+l' .
By the triangle inequality, we have
(5.4.20) If 1 (x) - s 1 (x) I ~ If 1 (x) - J 1 (x) I
+ IJ'(x) - s'(x)I.
As f' is twice continuously differentiable, we have the
well-known inequality
104
(5.4.21) lf'(x) - J'(x)! .s_ hi 2 t(l - t) llf'''II / 2!.
As both J' ands' are lines on [xi, xi+l], we have
(5.4.22) IJ' (x) - s' (x) I .s_ [fi' - si'] (1 - t) +
[fi+l 1 - si+1'] t
< I I ei' I I ( I 1 - t I + It I }
< I I ei' 11
< (1/6) h 2 llf"'II •
Adding (5.4.21) and (5.4.22) gives the desired formula
(5.4.23) lf'(x) - s'(x)I < [1/6 + t(l-t)/2] h 2 llf'"II
< (7/24) h 2 !lf'"II •
Several further refinements of this argument are possible.
This particular bound may be worthy of further study in
the future.
We next wish to bound f''(x) - s''(x). Choosing the
arbitrary partition subinterval [xi, xi+l], we consider
the parabola L matching fat xi, zi+l' and xi+l" By the
triangle inequality we have
(5.4.24) If" (x) - s" (x) I
< lf"(x)-L"(x) I + jL"(x) -s"(x) I
< lf"(x) - L"(x)I
+ (l/hi2) lei Ao'' (t) + ei+l A2'' (t) I
< lf''(x) - L''(x)I
+ (l/hi2) lleill (IAo"(t)l+IA2"(t)IJ
< If'' (x) - L'' (x) I
+ (l/hi 2 ) (h 3 /24) I If" I 11 [4 + 4]
< /f"(x) - L"(x)/ + (h 3 /3hi 2 ) /lf"'/1
The bound on f'' (x) - L'' (x) is obtained by the Peano

105
theorem technique. We have for 0 < t < 1 and -
f e C'" [xi,xi+lJ' that
(5.4.25) If' ' (x) - LI I (X) I <
1 h•
l IK( 2 ,0) (t,z) jdz llt"'ll/21
0
where
K(t,z) = (t - z)~ - A 0 (t) (0 - zJ2 +
- A 1 ( t) (1/2 - z]~ - A 2 (t) [1 - zJi
= (t - z) 2 - (1/2 - z) i 4t(l - t) +
- (1 - z) 2 2t(t - 1/2)
and for 0 < t < 1/2,
K( 2 ,0) (t,z)/2! = 2z 2 t > z
-1 + 2z 2 t < z' z < 1/2
- 2(1 - z)2 t < z' z > 1/2 . The first of these two terms is positive and the last two
are negative. Evaluation of the integral of (5.4.25) is
straightforward, giving for O < t < 1/2,
(5.4.26) 1£" (x) - L" (x) I ~
hi ((4t 3 /3) -t+ 1/2] llf"'II.
Using (5.4.26) in (5.4.24) gives for O ~ t ~ 1/2,
(5.4.27) 1£'' (x) - s'' (x) I ~ (hi[ (4t 3 /3) - t + 1/2]
+ h3/3hi2] I If' I I 11
~ (hi/2 + h3/3hi2} I 1£' I I 11 '
which holds also for 1/2 < t < 1.
Using the linear interpolation of fi' and fi+l' and
the usual triangular inequality, we may obtain the
alternate estimate
106
(5.4.28) . jf'' {x) - s'' {x) I < (hi[l/2 + t(l - t) l
+h2/3hi} llf'''II
which when h is larger than hi sometimes offers a lower
estimate of the error. As the proof is very similar to
those already given, we omit the details.

CHAPTER SIX CONCLUDING REMARKS
In the above chapters, we have given bounds for the
error of approximation of several polynomial and spline
interpolations. Rather than restate the theorems proved
in previous chapters, we will try to indicate what further
work is possible and desirable.
The work done here has provided some of the
motivation for the work of Bojanov and Varma (in
preparation) extending Cauchy's formula for the error of
polynomial interpolation to an expression for derivative
error. They proved the following theorem.
Theorem 6.1 (Bojanov and Varma) Let f e c(n+l) [a,b] and
let L [f ,x] be the polynomial of degree n interpolating f
at n + 1 points. Then for i < n + 1, we have
(6 .1.1) lf(i) (x) - L(i) [f,x] I _s.
11 n+l (i) 11 I If (n+l) 11/ (n+l) !
where n
n+l(X) = (X - xi) • i=O
Furthermore, (6.1.1) continues to hold for the case of
Hermite interpolation (when n (x) is appropriately
redefined). In particular, let f e c( 2 m) [0,1) and let
v 2 m-l by the two-point Hermite interpolation satisfying
107
108
V 2m- l { 0) = f { 0) ,
V2m-l {i) (0) = f{i) (0)
for i = 1, 2, • • , m - 1. Then
(6.1.2) lf{i) {x) - v2m-1 {i) {x) I
V 2m-l ( 1) = f { 1) ,
V2m-l {i) (1) = f {i) (1) ,
~ I ldi xm{l-x)ml I I lf{ 2m) I l/{2m) ! •
dxi
Equation (6.1.2) generalizes the results of Birkhoff and
Priver [1967]. A further generalization of (6.1.1) could
hold for well-posed two-point Birkhoff interpolation and
thus give the norm bounds of Chapters Two and Three.
An alternate approach, suggested in conversation with
Garrett Birkhoff, is to compute pointwise bounds for the
derivatives of polynomial interpolation by the automated
approximate evaluation of Peano kernels. A computer
routine that accomplishes the necessary evaluations is
given by Howell and Diaa {available on request). Similar
routines could automate some other sorts of error bounds.
Some of the possibilities are detailed in Howell and Diaa.
We next discuss further possibilities for the study
of spline error bounds. Hopefully, knowledge of the errors
of such error bounds should aid in comparing various
spline operators. For instance, for the class of
functions three times continuously differentiable, the
periodic parabolic splines were shown in Theorem 5.3 to
have bounds very close to the cubic splines of the type
discussed by Varma and Katsifarakis {Theorem 1.17). On
the other hand, many of the parabolic spline bounds can be
109
bettered by a c( 2 ) quartic spline which will be discussed
in 1 a ter work.
Many other spline error bounds may be amenable to the
same techniques employed here. Among these are the
derivative bounds for the c( 2 ) quartic spline of Chapter
Four, bounds for the lacunary quintics discussed by Meir
and Sharma [1973], and bounds for the local scheme
proposed by Prasad and Varma [1979].
Even the extensively studied cubic splines require
further study along these lines. The techniques used here
might yield good results when the interpolated functions
are once or twice continuously differentiable. Even the
second derivative bound given by Hall and Meyer [1976] for
c( 2 ) cubic splines interpolating c( 4 ) functions
differentiable is not exact. Finally of course it would
be of interest to develop a method (even if merely
numeric) of deriving optimal bounds for spline
interpolation in each case that the problem makes sense.
Another type of error problem which is accessible by
techniques similar to the ones given here is the error of
the quadrature associated with any given piecewise
polynomial interpolation.
REFERENCES
Ahlberg, J. H., and Nilson, E. N. "The approximation of linear functionals." J. SIAM Numer. Anal. 3:173-182 ---(1966).
Ahlberg, J. H., Nilson E. N., and Walsh J. L. The Theory of Splines and their Applications. Academic Press, New York (1967).
Atkinson, A. K. E. "On the order of convergence of natural cubic spline interpolation problems." SIAM ~ Num. Anal. 2:89-101 (1968).
Bernstein, S. approximation deg re donne. II
(1912).
N. "Sur l'ordere de la meillure des fonctions continues par des polyn6mes de M em • Ac ad . de Be 1 g i q u e 2 m e Serie 4 : 1-1 0 4
Birkhoff, G. D. "General mean value and remainder theorems with applications to mechanical differentiation and integration." Trans. Amer. Math. Soc. 7:107-136 (1906).
Birkhoff, G., and DeBoor, c. "Error bounds for spline interpolation." ~ Math. Mech. 13 :827-836 (1964).
Birkhoff, G., and Priver, A. "Hermite interpolation errors for derivatives." J. Math. Phys. ~:440-447 (1967).
Cheney, E. w., and Schurer, F. "A note on the operators arising in spline approximation." J. Approx. Theory !:94-102 (1968).
Ciarlet, P. G., Schultz, M. H., and Varga, R. S. "Numerical methods of high-order accuracy." Num. Math. 2_:394-430 (1967).
Davis, P. J. Interpolation and Approximation. Dover, New York (1975).
De Boor, C. A Practical Guide to Splines. SpringerVerlag, New' -York (1978).
110
111
Dzjadyk, V. K. "Constructive characterization of functions satisfying the Lip a condition O < a < 1 on a finite segment of the real axis." Izv. Akad. Nahk. Sov. ~at. 2: 623-652 (1956).
Fejer, L. "Uber interpolation." ~ttinger Nachrichten 66-91, Akademie der Wissenschaften, G~ttingen, (1916).
Golub, G. H., and Van Loan, C. F. Matrix Computations. Johns Hopkins University Press, Baltimore, Md. (1983).
Hall, C. A. "On error bounds for spline interpolation." ~Approx.Theory l:_:209-218 (1968).
Hall, C. A., and Meyer, W. w. "Optimal error bounds for cubic spline interpolation." J. Approx. Theory .l.§_:105-122 (1976).
Howell, G., and Diaa, N. "An APL Routine for Calculating Birkhoff Error Bounds." available on request (1986).
Jackson, D. The Theory of Approximation. Amer. Math. Assoc., New York (1930).
Karlin, S. Total Positivity, 2 Vols. Stanford University Press, Stanford, Calif. (1968).
Lidstone G. J. "Notes on the extension of Aitken's theorem (for polynomial interpolation) to the Everett types." Proc. Math. Soc. Edinburgh ~:16-19 (1930).
Lorentz, G. G. Birkhoff Interpolation. Addison-Wesley, Reading, Mass. (1983).
Lucas, T. R. "Error bounds for interpolating cubic splines under various end conditions." SIAM J. Numer. Anal. ---11:569-584 (1974).
Marsden, M. J. "On uniform spline approximation." ~ Approx. Theory _§_:249-253 (1972).
Marsden, M. J. "Quadratic spline interpolation." Bull. Amer. Math. Soc. 80:903-906 (1974).
Meir, A., and Sharma, A. "On uniform approximation by cubic splines."~ Approx. Theory ~:270-274 (1969).
Peano, G. "Resto nelle formule di quadratura espresso con un integrale definite." Rend. Accad. Lincei 22:562-569 (1913).
Powell, M. J. D. Approximation Theory and Methods. Cambridge University Press, New York (1981).

112
Sard, A. Linear Approximation. Amer. Math Soc., Providence, R.I. (1963).
Schoenberg, I. J. "Contributions to the problem of approximation of equidistant data by analytic functions. Part A: On the problem of smoothing or graduation. A first class of analytic approximation formulas." Quart. Appl. Math. _!:112-141 (1946).
Schoenberg, I. J. "On interpolation by spline functions and its minimal properties." Internat. Series Num. Math. {Birkh~ser) 1:109-129 {1964a).
Schoenberg, I. J. "Spline interpolation and best quadrature formulae." Bull. Amer. Math. Soc. 2..Q_:143-148 (1964b).
Schoenberg, I. J. "On Hermite-Birkhoff interpolation." ~ !:!ath. Anal. Appl. 16:538-543 (1966).
Sharma, A., and Meir, A. "Degree of approximation of spline interpolation." ~ Math. Mech. 15:759-767 (1967).
Stroud, A. H. Numerical Quadrature and Solution of Ordinary Differential Equations. Springer-Verlag-,-New York (1974).
Timan, A. F. "Approximation of functions satisfying Lip conditions." Dok. Akad. Nahk. Sci. SSSR. 77:969-972 (1951).
Varma, A. K., and Katsifarakis, K. L. "Optimal error bounds for cubic spline interpolation." in Approximation Theory and Applications, Proc. Int. Conf. 75th Birthday G. G. Lorentz, St. John's, Newfoundland Res. !:!ath. 133 (in press).
Walsh, J. L., Ahlberg, J. H., and Nilson E. N. approximation properties of the spline fit." J. Mech. 11:225-234 (1962).
"Best Math.
Whittaker, J. M. "On Lidstone's series and two-point expansions of analytic functions." Proc. London Math. Soc. 431-469 (1934).
Widder, D. V. "Completely convex functions and Lidstone s e r i e s . " Tran s • ~~ e r • !:! a th . Soc . ~ : 3 8 7 - 3 9 8 ( 1 9 4 2 ) .
Zygmund, A. Trigonometric Series, Vol. 1. Cambridge University Press, Cambridge, England (1968).
BIOGRAPHICAL SKETCH
The author was born on November 9, 1951, in Winfield,
Kansas. He graduated from high school in Emporia, Kansas,
in 1969 and received his B. A. in mathematics from New
College in Sarasota, Florida, in 1973. After graduation,
he worked as a construction estimator in the Washington,
D.C., area. He entered graduate school in 1978 and
received an M.S. in mathematics in 1981, an M.S. in
engineering sciences in 1984, and a Ph.D. in mathematics
in 1986.
113

I certify that I have read this study and that in my opinion it conforms to acceptable standards of scholarly presentation and is fully adequate, in scope and quality, as a dissertation for the degree of Doctor of Philosophy
~ u '----. \~L.__~~ \/Q,V "--<-
Arun K. Varma, Chairman Professor of Mathematics
I certify that I have read this study and that in my opinion it conforms to acceptable standards of scholarly presentation and is fully adequate, in scope and quality, as a dissertation for the degree of~ ~ctor of Philosophy
r.f\___ , '-::_/ . c.·, l-I,. i Cc-L-U a L u_ '-Nicol a e Dinculeanu Professor of Mathematics
I certify that I have read this study and that in my opinion it conforms to acceptable standards of scholarly presentation and is fully adequate, in scope and quality, as a dissertation for the degree of Doctor of Philosophy
~ve1 a. ~c-ui.Jg David Drake Professor of Mathematics
I certify that I have read this study and that in my opinion it conforms to acceptable standards of scholarly presentation and is fully adequate, in scope and quality, as a dissertation for the degree of Doctor of Philosophy
V. M. 9-r"C Vasile Popov Professor of Mathematics
I certify that I have read this study and that in my opinion it conforms to acceptable standards of scholarly presentation and is fully adequate, in scope and quality,
as a dissertation for the degree }J, Do~l~~losophy
A.'i: Khifu--Associate Professor
of Statistics
This dissertation was submitted to the Graduate Faculty of the Department of Mathematics in the College of Liberal Arts and Sciences and to the Graduate School and was accepted as partial fulfillment of the requirements for the degree of Doctor of Philosophy.
August 1986 Dean, Graduate School

UNIVERSITY OF FLORIDA
11111111111 1111 11 1111111111 11111111111111111111 1111111111111111 1 3 1262 08553 4286
Related Documents











