Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript




ARISTOTLE
List of ISO supported G-Codes and M-functions G-Codes
G-code Function G00 Travers motion and positioning G01 Linear interpolation G02 Circular interpolation CW G03 Circular interpolation CCW G04 Dwell G06.2 Non-uniform B-Spline interpolation -
NURBS G06.05 Spline Interpolation * G7 Plane rotation G7.1 Plane rotation cancel G8 3D tool path conversion to 5-axis
processing G09 Exact stop G10 Tool offset value and work coordinates
shift G12.1 Polar coordinate interpolation mode G13.1 Polar coordinate interpolation cancel
mode G15 Polar coordinates command cancel G16 Polar coordinates command G17 XY plane designation G18 ZX plane designation G19 YZ plane designation G20 Inch input designation G21 Metric input designation G28 Return to Reference Position G29 Return from Reference Position G30 2nd, 3rd and 4th Reference Position
Return G31 Skip function G34 Display a String G37 Input a Number or Numbers G40 Tool radius compensation cancel G41 Tool radius compensation, left G42 Tool radius compensation, right G43 Tool length offset, + G44 Tool length offset, - G49 Tool length offset cancel G50 Scaling off G50.1 Mirror off G51 Scaling on G51.1 Mirror on G54 Shift to work coordinate system 1 G55 Shift to work coordinate system 2 G56 Shift to work coordinate system 3 G57 Shift to work coordinate system 4 G58 Shift to work coordinate system 5 G59 Shift to work coordinate system 6
G60 Single Direction Positioning G61 Exact stop mode G62 Automatic corner override * G64 Exact stop mode cancel * G65 Non-modal call of user macro G66 Modal call of user macro G67 Modal Macro call cancel G68 Coordinate system rotation G69 Coordinate system rotation cancel G73 Drilling Canned cycle G74 Left Hand Rigid Tapping cycle G74.1 Left Hand Tapping cycle G76 Fine Boring cycle G80 Canned cycle cancel G81 Drilling cycle G82 Drilling/Counter Boring cycle G83 Peck drilling cycle G84 Rigid Tapping cycle G84.1 Tapping cycle G85 Boring cycle G86 Boring cycle G87 Back Boring cycle G88 Boring cycle G89 Boring cycle G90 Absolute command designation. G91 Incremental command designation G92 Programming of absolute zero point G93 Inverse Time Feedrate * G98 Return to initial point for canned cycles G99 Return to point R for canned cycles G110 Enable Forbidden Zone Entry Check G111 Disable Forbidden Zone Entry Check G125 Tool motion in MDI backward to the
last move active (5-axis) G140 5-axis tool path rotation (RTCP) cancel G141 5-axis tool path rotation (RTCP) G147 5-axis indexing plane rotation position
correction G149 Start Round and/or Chamfer. G-149 Cancel Round and/or Chamfer. G998 Smoothing On (High Speed Machining) G999 Smoothing Off G5001 Run SHARNOA G-code
* Functions can be implemented by request

M-functions.
The machine builder may specify its own M-codes, from M200 to M999, via the integrated PLC system. The standard CNC M-functions are listed in the table below.
M-code Function M00 Program stop M01 Optional stop M02 End of program M03 Spindle forward rotation M04 Spindle reverse rotation M05 Spindle stop M06 Tool change M07 Coolant On M08 Spray On M09 Coolant and Spray OFF M11 Spindle orientation On M111 Spindle orientation (maintenance) OnM13 Tool search M14 Pocket search M18 Rigid Tapping On (ISO approach) M20 Magazine home position search M22 End of Program and Power OFF M24 Chip Conveyor CW On M25 Conveyor CW and Wash Down On M26 Conveyor CW and Wash Down Off M27 Conveyor CCW and Wash Down On M29 Rigid Tapping On M30 End of Program M33 Spindle CW On and Coolant On M34 Spindle CCW On and Coolant On M35 Rotary Axis A or C Clamp M36 Rotary Axis A or C Unclamp M38 Program, Spindle, Coolant Conv.
Stop M40 Spindle Load Adaptive Control On
M41 Spindle Load Adaptive Control Off. M48 Tool Clamp (maintenance) M49 Tool Unclamp (maintenance) M50 Tool length measurement devise
(Renishaw or equivalent) ON M51 Tool length measurement devise
(Renishaw or equivalent) OFF M53 Spindle measurement probe ON M56 Manual Tool Change M70 Graph View (versus time) On M71 Graph View Off M75 Pot Up (maintenance) M76 Pot Down (maintenance) M81 Arm 0 (maintenance) M82 Arm 60 (maintenance) M83 Arm 180 (maintenance) M98 Subprogram call (ISO approach) M99 Subprogram end. M104 Coolant Through Spindle On M105 Coolant Through Spindle OFF M129 Spindle Orientation (maintenance) M135 Tilting Axis B Clamp M136 Tilting Axis B Unclamp M170 Inch units (SHARNOA approach) M171 Metric units (SHARNOA approach) M195 Rotational axis modulo 0 – 360 degr. M199 Automatic change of servo parameters.
The machine builder, to implement his machine design requirements, may specify other M-codes, not listed above. The machine builder and end –user can address any custom made macro program and/or subroutine to run as additional M-code. This mechanism allows easy running of any program within existing program in memory (widely used by implementation of Measurement Subroutines Library).
IV) Calculation functions. Standard arithmetic calculations : _ + _ - _ * _ / () # [for parameters] Logic operations: < / <= / <> / > / >= / = = / JMP / SKP Trigonometric functions:
SIN / COS / TAN / CTAN / ATAN / ACOS / ASIN Mathematical functions: EXP / SQRT / LOG / ABS / ROUND / FIX / FUP / FRC

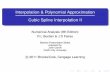
PS 24VDC
PS 5 VDC; +/-12VDC
Op. Panel Enclosure
Screen, Keyboard,
Mouse.
USB Communication Controller Box
XT-9001+XT-9002
XT-9703
Motors, Encoders,Linear Scales Connections
I/O Connection
XT-9720
RS232 Communication
Channel
Drive Spindle
Encoder
Encoder
Encoder
Drive Spindle Drive Spindle
XT-9703
PC Ethernet,
LAN, Internet
Power
Encoder
Power
Motor
Motor
I/O Connection
MPG

SPECIFICATIONS ARISTOTLE
PHYSICAL • Type: Modular System with Main Processor board and
System Interface boards (up to 4). • Dimensions: 17x12.5 cm (6.7x4.9 inches) main board
33x11.5 cm (13x4.5 inches) System Interface board. • Weight: 0.6 Kg (1.3 lb.)
CPU Model: Texas Instruments DSP 320VC33-150 • Type: 32-bit, Floating Point MEMORY • RAM: 256 K x 32-bit words (1 Mb static memory) • RAM Speed: 0 wait state • Dual Ported RAM: 4 Kb • Flash Memory: 8 M x 8-bit (4 Mbt)
PERFORMANCE • Axes: Up to 8 Axes one System Interface board
Up to 16 Axes with two System Interface boards. • Stepper Motors Control Mode: up to 16 Axes. • Position Control Mode: up to 16 Axes. • Velocity Control Mode: up to 16 Axes. • Torque Control Mode: up to 16 Axes. • Commutation Control Mode: up to 8 Axes. • Simultaneously Controlled Synchronized Axes: Max. 8
groups of synchronized axes, max. 16 axes on each group. Flexible axes group coordinate setting. All axes in the same group (same coordinate system) are perfectly synchronized to the servo cycle.
• Servo Cycle Time: 250 µsec (16 axes) • Commutation Cycle Time: 83 µsec (8 axes) • Response Time to Command: 0.25 msec • Block Execution Rate: Up to 4000 blocks/sec • Servo Algorithms:
PID with Feedforward; Adaptive torque Feedforward, Notch filter, S-curve speed control with user configured jerk; Auto-homing procedure; Continuous vector feed with look ahead up to 512 steps; Lead and temperature screw with cross-axis compensation; Electronic Cams, Gearing; Multi-axis interpolation – linear / circular. Dynamic encoder resolution change, Multi-set of motion parameters, Special control algorithms with “dead” zones. Cubic, spline interpolation, 1/T control, and Inverse kinematics computations are optional.
INPUTS/OUTPUTS • Digital I/O: 128 fast standard digital inputs/outputs for
general purpose use 16 programmable ports of 8 I/O (up to 512 I/O with 4 System Interface boards - optional).
• Analog Inputs: 16 fast inputs (up to 64) 12-bit resolution ±10 VDC; impedance 30 kOhm; 16-bit res. - optional.
• Analog Outputs: 8 outputs (up to 32) ±10 Volt DC 12-bit (optional 16-bit) resolution for motor commands. Can be used as general purpose DAC, when not used in motion control loop.
• Feedback: Standard square wave (digital encoder) and electric phase detector (encoder +Hall Effect); encoder over temperature input; sin/cos feedback – optional.
• Second Feedback: Standard square wave. • Encoder frequency: up to 10 MHz with 12-bit counter (20
MHz-optional), using dual feedback with specially developed dynamic algorithms in firmware allowing very high motion speeds with virtually “no-limited” input frequency of encoder readings.
• Programmable real position strobe signal: 1 output (4 - optional) within 0.2 microseconds.
• Programmable real position pulse train: 1 output (4 – optional) related to encoder feedback frequency by factor 1–256. • Auxiliary Pulse count inputs: 4 inputs (up to 16 optional)
with 8-bit by frequency up to 500 KHz • High Speed Position Capture (Latch Input):
1 per axis + 8 additional inputs (up to 32) with anti-bounds protection; allows normally close or open configuration response time within 0.1 microseconds.
POWER REQUIREMENTS (from on-board connector) • 1.0 A @ +5Volt 0.4 A @ +12Volt 0.4 A @ -12Volt
KINEMATICS RANGES and ACCURACY • Velocity and Acceleration Ranges:
No limits (due to floating point DSP) • Position: ±1 Billion counts • Gear Ratio Range: No limits • Filter Constants: No limits • Position Accuracy: ±1 count • Position Capture Accuracy: within ±1 count • Velocity Accuracy: 0.005% • Motor Commands Accuracy: 12-bit or 0.005 Volt;
16-bit or 0.0003 Volt – optional.
COMMUNICATION • USB communication channel. • RS 232 and RS422 (485): Serial communication channels. • Fast serial communication (up to 15 Mbit/s). DEVELOPMENT ENVIRONMENT (PLC). • Development Software: ProcessDesigner™ and
ProcessDebugger™ • Graphic FBD Language: Object Oriented Function Block
Diagram standard (IEC-1131) with multitasking support for PLC development.
• Designer: ProcessDesigner™ as a PLC tool, which implements the process algorithms with inputs and outputs.
• Debugging: ProcessDebugger™ enables debugging of the process while monitoring status of each I/O signal, variables and messages.
PROGRAMMING LANGUAGE • API Functions for Windows 98/ME/NT/2000/XP: DLL
functions and ComServer methods available in C, C++, MS VC++, ANSI C, MS Visual Basic, Delphi allowing customization of operator interfaces.
• Scripting Language: Simple, based on TCL scripting environment supporting variables, math expressions, subroutine call, comparisons, etc. and extended for motion control commands (allows use of simple ASCII code, ISO G-code, SHARNOA G-code and HPGL file formats).
CONFIGURATION TOOLS • Development Software:
ControlConfiguration™ software allows system setup, configuration of the machine limits, tuning and executing of any defined task to test real operation of the machine. MotionAnalyzer™ allows monitoring of real motion parameters as in multi-channel oscilloscope with memory AxisMotion and MotionViewer – simple tests utilities. Ballbar utility allowing easy test of axes interpolation.
• Graphic Interface: Graphic displays show status and response of axes, real parameter values.





Related Documents