This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution and sharing with colleagues. Other uses, including reproduction and distribution, or selling or licensing copies, or posting to personal, institutional or third party websites are prohibited. In most cases authors are permitted to post their version of the article (e.g. in Word or Tex form) to their personal website or institutional repository. Authors requiring further information regarding Elsevier’s archiving and manuscript policies are encouraged to visit: http://www.elsevier.com/authorsrights

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
This article appeared in a journal published by Elsevier. The attachedcopy is furnished to the author for internal non-commercial researchand education use, including for instruction at the authors institution
and sharing with colleagues.
Other uses, including reproduction and distribution, or selling orlicensing copies, or posting to personal, institutional or third party
websites are prohibited.
In most cases authors are permitted to post their version of thearticle (e.g. in Word or Tex form) to their personal website orinstitutional repository. Authors requiring further information
regarding Elsevier’s archiving and manuscript policies areencouraged to visit:
http://www.elsevier.com/authorsrights

Author's personal copy
Enhancing precision performance of trajectory trackingcontroller for robot manipulators using RBFNN and adaptivebound
Naveen Kumar a, Vikas Panwar b,⇑, Jin-Hwan Borm c, Jangbom Chai c
a Department of Mathematics, National Institute of Technology (NIT), Kurukshetra 136119, Haryana, Indiab Department of Applied Mathematics, Gautam Buddha University, Greater Noida 201308, Indiac Department of Mechanical Engineering, Ajou University, Suwon 443749, Republic of Korea
a r t i c l e i n f o
Keywords:Model based controllerRBF neural networkAdaptive boundReconstruction errorAsymptotically stable
a b s t r a c t
In this paper the design issues of trajectory tracking controller for robot manipulators areconsidered. The performance of classical model based controllers is reduced due to thepresence of inherently existing uncertainties in the dynamic model of the robot manipula-tor. An intermediate approach between model based controllers and neural network basedcontrollers is adopted to enhance the precision of trajectory tracking. The performance ofthe model based controller is enhanced by adding an RBF neural network and an adaptivebound part. The controller is able to learn the existing structured and unstructured uncer-tainties in the system in online manner. The RBF network learns the unknown part of therobot dynamics with no requirement of the offline training. The adaptive bound part isused to estimate the unknown bounds on unstructured uncertainties and neural networkreconstruction error. The overall system is proved to be asymptotically stable. Finally, thenumerical simulation results are produced with various controllers and the effectiveness ofthe proposed controller is shown in a comparative study for the case of a Microbot typerobot Manipulator.
� 2013 Elsevier Inc. All rights reserved.
1. Introduction
In the past three decades, the design of trajectory controllers for robot manipulators has evolved as an active area ofextensive research activities. Since the dynamics of robot manipulators are highly nonlinear in nature and involve uncertainelements such as friction, unknown payload mass and external disturbances, the researchers have investigated various con-trol schemes to achieve the precise tracking control of robot manipulators. Classically, many control schemes incorporatedPID type controllers due to their simple structure, ease of use and low cost [1,2]. Designs of enhanced version of nonlinearPID controller are also reported in the literature [3,4]. However, since the dynamics of robot manipulators are highly non-linear, the performance of linear controllers is very limited. To overcome the shortcomings of the linear controllers, modelbased nonlinear controllers like computed torque (CT) controller are also proposed [5]. Though for trajectory control of arobot manipulator, the model based control design requires an accurate dynamic model and precise parameters of themanipulator. In real world applications, every dynamic model is subject to various uncertainties of both kinds, structuredand unstructured. These uncertainties result in positioning and/or trajectory tracking errors and even cause instability ofthe system. The control of uncertain systems is usually accomplished using either an adaptive control scheme or a robust
0096-3003/$ - see front matter � 2013 Elsevier Inc. All rights reserved.http://dx.doi.org/10.1016/j.amc.2013.12.082
⇑ Corresponding author.E-mail addresses: [email protected] (N. Kumar), [email protected] (V. Panwar).
Applied Mathematics and Computation 231 (2014) 320–328
Contents lists available at ScienceDirect
Applied Mathematics and Computation
journal homepage: www.elsevier .com/ locate /amc
Author's personal copy
control approach. In the robust approach, the controller has a fixed structure that yields an acceptable performance for plantsunder study [6–11]. The dynamics of the robot manipulator can be linearly parameterized. Exploiting this property manyadaptive learning control methods are proposed in literature [12,13]. However these methods require the knowledge of com-plicated regression matrices and face difficulties in case of unmodeled disturbances.
Recently, neural network technology has gained in popularity among control community due to their often cited paralleldistributed structure and learning capabilities. The neural network are extensively used to compensate for the full nonlineardynamics of robot manipulators with no knowledge of the dynamics of the system [14–16]. The ability of neural networks tocompensate for nonlinearities is due to the universal approximation property [17,18] that states that any sufficiently smoothfunction can be approximated by a suitable network for all inputs in a compact set and the resulting function reconstructionerror is bounded. The neural network weight estimates are generated using weight update law that incorporates the systemtracking error to modify the weights. The use of a prediction error containing the information for function reconstructionerror is also proposed for the purpose of weight update to achieve improved performance [19]. However, there has been lim-ited attempts to bridge the model based controllers and model learning controllers [20]. A hybrid approach is proposed fortrajectory tracking control of robot manipulators based on a model based controller and its fusion with RBF neural networkbased controller [21]. In the present study, we have modified the robust term of the controller [21] to avoid the singularitiesand we are able to enhance the precision performance of the trajectory tracking controller with the present approach.
The novelty of the paper is the development of an asymptotically stable controller combining model based techniquesand neural network based learning approach for uncertainties. Generally, all neural network based controllers assume noprior knowledge about the system dynamics which is not the actual case. We are always equipped with at least partial infor-mation about the system dynamics. In the present paper we have utilized the available information about robot dynamics topropose a new controller. The resulting system is asymptotically stable compared to uniform ultimate boundedness formany NN based controllers. The numerical simulation results are produced with various controllers and the effectivenessof the proposed controller is shown in a comparative study for the case of a Microbot type robot Manipulator.
The paper is organized as follows. Section 2 presents the dynamic model of robot manipulator and its properties. The de-tails of control system design are given in Section 3. Section 4, presents the stability analysis of the system. In Section 5, thesimulation results are presented. Finally, conclusions are drawn in Section 6.
2. Dynamic model of robot manipulator
Based on Euler–Lagrangian formulation, the motion equation of an n-link rigid, nonredundant robot manipulator can beexpressed in joint space as
MðqÞ€qþ Vmðq; _qÞ _qþ GðqÞ þ Fð _qÞ þ sd ¼ s ð1Þ
where MðqÞ 2 Rn�n represents the inertia matrix, Vmðq; _qÞ 2 Rn�n represents the centripetal-coriolis matrix, GðqÞ 2 Rn repre-sents the gravity vector, Fð _qÞ 2 Rn represents the friction, sd 2 Rn represents a general nonlinear unmodeled disturbance,s 2 Rn represents the torque input control vector and qðtÞ; _qðtÞ; €qðtÞ 2 Rn represent link position, velocity and accelerationrespectively. The following fundamental properties of dynamic model (1) and assumptions will be exploited in the subse-quent controller development.
Property 1. The inertia matrix MðqÞ is symmetric positive definite matrix and bounded above and below i.e. there exist positiveconstants aM and bM such that aM 6 MðqÞ 6 bM.
Property 2. The matrix _MðqÞ � 2Vmðq; _qÞ is skew-symmetric i.e. for any y 2 Rn we have yTð _MðqÞ � 2Vmðq; _qÞÞy ¼ 0.
Assumption 1. kFð _qÞk ¼ aþ bk _qk for some unknown positive constants a and b.
Assumption 2. ksdk 6 c for some unknown positive constants c.
3. Controller design
In this section, the aim is to design a control torque input s to enhance the precision performance of tracking even in thepresence of structured and unstructured uncertainties in the system.
3.1. Error system development
Let qdðtÞ 2 Rn denote the desired trajectory in the joint space. Define the tracking error as follows
eðtÞ ¼ qdðtÞ � qðtÞ ð2Þ
N. Kumar et al. / Applied Mathematics and Computation 231 (2014) 320–328 321

Author's personal copy
The filtered tracking error is defined as
sðtÞ ¼ _eðtÞ þ ^eðtÞ ð3Þ
where ^ ¼ ^T 2 Rn�n and is a positive definite matrix. Differentiating (3) and using (1), the robot manipulator dynamics maybe written in terms of the filtered tracking error as
M _sðtÞ ¼ �Vms� sþ hðxÞ þ Fð _qÞ þ sd ð4Þ
where hðxÞ ¼ MðqÞð€qd þ ^ _eÞ þ Vmðq; _qÞð _qd þ ^eÞ þ GðqÞ. The function hðxÞ can be written as combination of two parts repre-senting known dynamics hðxÞ and unknown dynamics ~hðxÞ respectively i.e.
hðxÞ ¼ hðxÞ þ ~hðxÞ ð5Þ
where hðxÞ ¼ MðqÞð€qd þ ^ _eÞ þ Vmðq; _qÞð _qd þ ^eÞ þ GðqÞ and ~hðxÞ ¼ ~MðqÞð€qd þ ^ _eÞ þ ~Vmðq; _qÞð _qd þ ^eÞ þ ~GðqÞ. The vector x is gi-ven by xðtÞ ¼ ½eT _eT qT
d_qT
d€qT
d �T
3.2. RBF Neural network
In this proposed work, a radial basis function (RBF) neural network is used to compensate for the unknown dynamics part.RBF neural network with fixed centers and widths provide a good choice for approximation of unknown dynamics part [18].Thus we may have the following approximation
~hðxÞ ¼WTfðxÞ þ �ðxÞ ð6Þ
where W 2 RN�n represents the matrix of neural network weights, fð�Þ : R5n ! RN is a vector of smooth basis functions(known), �ð�Þ : R5n ! Rn represents the neural network reconstruction error and N denotes the number of nodes of the net-work. The neural network reconstruction error can me made arbitrarily small if N is sufficiently large, i.e. k�ðxÞk < �N forsome �N > 0. The vector field fðxÞ is Gaussian type functions [22] defined element wise as:
fiðxÞ ¼ exp �kx� cik2
r2i
!1;2; . . . ;N ð7Þ
The centers ci 2 R5n and width ri 2 R are predetermined and local search techniques [23] can be appropriately used to chooseci and ri. Substituting for ~hðxÞ in (4), the robot dynamics can be rewritten as:
M _sðtÞ ¼ �Vms� sþ hðxÞ þWTfðxÞ þ Fð _qÞ þ sd þ �ðxÞ ð8Þ
3.3. Adaptive bound
Using assumptions (1) and (2) in Section 2 and considering the above mentioned bound �N on neural network reconstruc-tion error, we have
kFð _qÞ þ sd þ �ðxÞk 6 aþ bk _qk þ c þ �N ð9Þ
Define b ¼ aþ bk _qk þ c þ �N as adaptive bound and it is proposed that it may be written in the following form
b ¼ Q Tðk _qkÞ/ ð10Þ
where Q 2 Rk is a known vector function of joint velocities _q and / 2 Rk is a parameter vector, for some fixed positive numberk. considering the expressions in (8)–(10) simultaneously, the following control torque input is proposed to achieve the de-sired motion trajectory
s ¼ hþ Ksþ WTfðxÞ þ b2s
bksk þ dð11Þ
where _d ¼ �cd; dð0Þ ¼ design constant > 0; c > 0. b ¼ QT /, W and / are estimated values of neural network weights andparameter vector respectively provided by tuning algorithms. K ¼ KT 2 Rn�n is a positive gain matrix.
Substituting (11) in (8), the closed loop dynamics is becomes:
M _sðtÞ ¼ �ðK þ VmÞsþ ~WTfðxÞ þ Fð _qÞ þ sd þ �ðxÞ �b2s
bksk þ dð12Þ
where ~W ¼W � W .
322 N. Kumar et al. / Applied Mathematics and Computation 231 (2014) 320–328

Author's personal copy
4. Stability analysis
Let the robot dynamics be represented by (1) and the control inputs to the system be designed as in (11) then with theadaptation laws given in (13) and (14) for neural network weights and adaptive bound respectively, the overall resultingsystem is asymptotically stable and the filtered tracking error sðtÞ and henceforth the tracking error eðtÞ goes to zero ast !1
_W ¼ CwfðxÞsT ð13Þ
_/ ¼ C/Qksk ð14Þ
where Cw ¼ CTw 2 RN�N and C/ ¼ CT
/ 2 Rk�k are positive definite matrices.
Proof. To prove the stability of the system, consider the following Lyapunov function candidate
L ¼ 12
sT Msþ 12
trð ~WTC�1w
~WÞ þ 12
trð~/TC�1/
~/Þ þ dc
ð15Þ
where ~W ¼W � W and ~/ ¼ /� /.The time derivative of the Lyapunov function gives
_L ¼ 12
sT _Msþ sT M _sþ trð ~WTC�1w
_~WÞ þ trð~/TC�1/
_~/Þ þ_dc
ð16Þ
Substituting (12) in (16) and using the fact that _~W ¼ � _W , _~/ ¼ � _/ and _d ¼ �cd, the following expression is obtained
_L ¼ 12
sT _Ms� sTðK þ VmÞsþ sT ~WTfðxÞ þ sTðFð _qÞ þ sd þ �ðxÞÞ �b2sT s
bksk þ d� trð ~WTC�1
w_WÞ � trð~/TC�1
/_/Þ � d ð17Þ
_L ¼ 12
sTð _M � 2VmÞs� sT Ksþ sT ~WTfðxÞ þ sTðFð _qÞ þ sd þ �ðxÞÞ �b2ksk2
bksk þ d� trð ~WTC�1
w_WÞ � trð~/TC�1
/_/Þ � d ð18Þ
If the tuning algorithms in (13) and (14) are chosen and the Property 2 in Section 2 is exploited, Eq. (18) can be rewritten as
_L ¼ �sT Ksþ sT ~WTfðxÞ þ sTðFð _qÞ þ sd þ �ðxÞÞ �b2ksk2
bksk þ d� trð ~WTfðxÞsTÞ � trð~/T QkskÞ � d ð19Þ
_L ¼ �sT Ksþ sTðFð _qÞ þ sd þ �ðxÞÞ �ðQ T /Þ2ksk2
ðQT /Þksk þ d� ~/T Qksk � d ð20Þ
Finally, using (9) and definition of adaptive bound b, one can find that
sTðFð _qÞ þ sd þ �ðxÞÞ 6 kskkðFð _qÞ þ sd þ �ðxÞÞk 6 bksk ¼ Q T/ksk ¼ Q Tð/þ ~/Þksk
Using the above inequality, (20) can be rewritten as
_L 6 �sT Ksþ ðQT /Þksk � ðQT /Þ2ksk2
ðQ T /Þksk þ d� d 6 �sT Ksþ dðQT /Þksk
ðQ T /Þksk þ d� d
_L 6 �kminksk26 0 ð21Þ
where kmin denote the minimum singular value of matrix K.Since, _LðsðtÞ; ~W; ~VÞ 6 0) LðsðtÞ; ~W; ~VÞ 6 Lðsð0Þ; ~W; ~VÞ one can find that sðtÞ; ~W; ~V are bounded. Define a function
DðtÞ ¼ kminksk26 � _L. Integrating the function DðtÞ with respect to time the following inequality can be deducedZ t
0DðtÞdt 6 Lð0Þ � LðtÞ ¼ Lðsð0Þ; ~W; ~VÞ � LðsðtÞ; ~W; ~VÞ ð22Þ
Now Lðsð0Þ; ~W; ~VÞ being a bounded function and LðsðtÞ; ~W; ~VÞ being decreasing and bounded function, one can obtain the fol-lowing result
limt!1
Z t
0DðtÞdt <1 ð23Þ
N. Kumar et al. / Applied Mathematics and Computation 231 (2014) 320–328 323

Author's personal copy
Also, sðtÞ is bounded and therefore _sðtÞ and hence _DðtÞ is bounded. This establishes the uniform continuity of DðtÞ. Using Bar-balat’s Lemma [24], it can be shown that limt!1DðtÞ ¼ 0) sðtÞ ! 0 as t !1. This proves that the overall resulting system isasymptotically stable. Moreover, the tracking error eðtÞ goes to zero according to sðtÞ ! 0 with t !1.
5. Simulation results
In this Section, the simulation results are presented for a 3 degree of freedom Microbot robot manipulator. The details ofthe dynamic model of the manipulator can be found in [25]. Let q1ðtÞ; q2ðtÞ; q3ðtÞ denote the angles of the three joints;m1;m2;m3 and l1; l2; l3 denote the masses and lengths of the links 1, 2, 3 respectively. Cubic polynomial trajectories have beenplanned as desired trajectories for periodic motion between the following set of values for joint angles and joint velocities.The angle q1ðtÞ varies between 0 and 3p
4 ; the angle q2ðtÞ varies between 0 and p4 and the angle q3ðtÞ varies between � p
2 and p4.
The joint velocities are taken as zero values at the periodic end points of the planned trajectories. The periodic time intervalis assumed to be 10 s e.g. for t 2 ½0;10� the following desired trajectory is considered
q1dðtÞ ¼ 9p400 t2 � 3p
2000 t3; q1dð0Þ ¼ 0; q1dð10Þ ¼ 3p4
_q1dð0Þ ¼ 0; _q1dð10Þ ¼ 0
q2dðtÞ ¼ 3p400 t2 � p
2000 t3; q2dð0Þ ¼ 0; q2dð10Þ ¼ p4
_q2dð0Þ ¼ 0; _q2dð10Þ ¼ 0
q3dðtÞ ¼ � p2 þ 9p
400 t2 � 3p2000 t3; q3dð0Þ ¼ � p
2 ; q3dð10Þ ¼ p4
_q3dð0Þ ¼ 0; _q3dð10Þ ¼ 0
The remaining part of planned trajectories for t 2 ð10;45� can be found similarly. It is assumed that the manipulator picks upan unknown payload at time instants t ¼ 10 s and t ¼ 30 s. It releases the payload at instants t ¼ 20 s and t ¼ 40 s. For sim-ulation purpose the payload mass is taken as 1 unit. The whole system is actually simulated for 45 s.
The friction and unknown disturbance terms are taken asFðqÞ ¼ 5 _qþ sgnð _qÞ; sd ¼ ½4cosð2tÞ; sinðtÞ þ cosð2tÞ; 2sinðtÞ�T .The following parameter values are considered for the modelm1 ¼ 10 kg; m2 ¼ 5 kg; m3 ¼ 4 kg; l1 ¼ 5 m; l2 ¼ 4 m; l3 ¼ 2:5 m; g ¼ 9:8m=sec2
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 1
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 2
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 3
Fig. 1. Tracking error with CT controller.
324 N. Kumar et al. / Applied Mathematics and Computation 231 (2014) 320–328
Author's personal copy
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 1
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 2
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 3
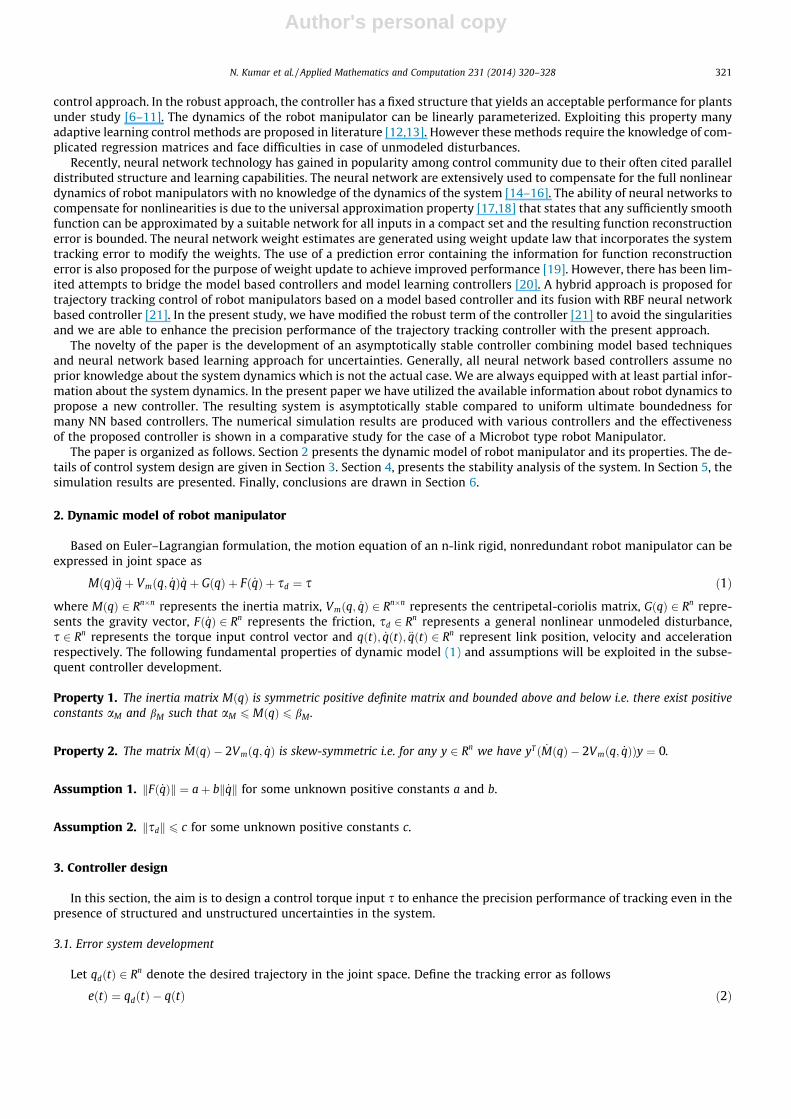
Fig. 2. Tracking error with FFNN controller.
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 1
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 2
0 5 10 15 20 25 30 35 40 45−0.2
−0.1
0
0.1
0.2
time (sec)
trac
king
err
or (
radi
an)
Joint angle 3
Fig. 3. Tracking error with proposed RBFNN controller.
N. Kumar et al. / Applied Mathematics and Computation 231 (2014) 320–328 325
Author's personal copy
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 1
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 2
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 3
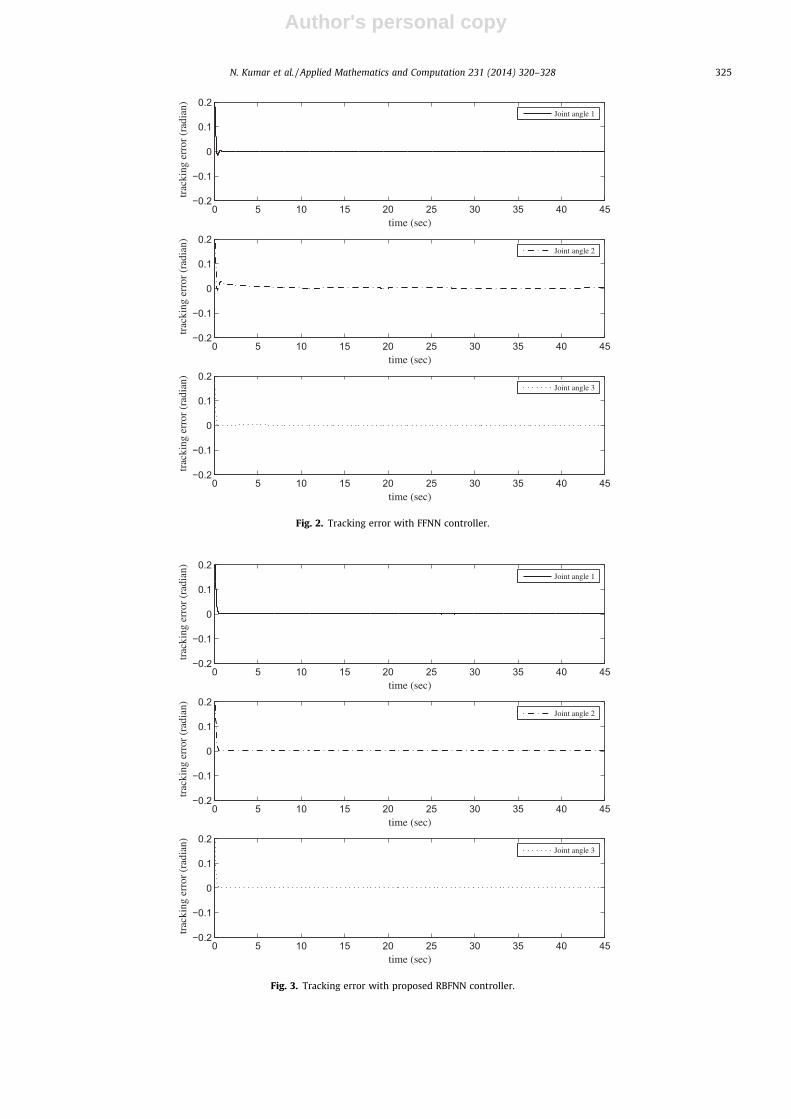
Fig. 4. Joint velocities with CT controller.
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 1
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 2
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 3
Fig. 5. Joint velocities with FFNN controller.
326 N. Kumar et al. / Applied Mathematics and Computation 231 (2014) 320–328
Author's personal copy
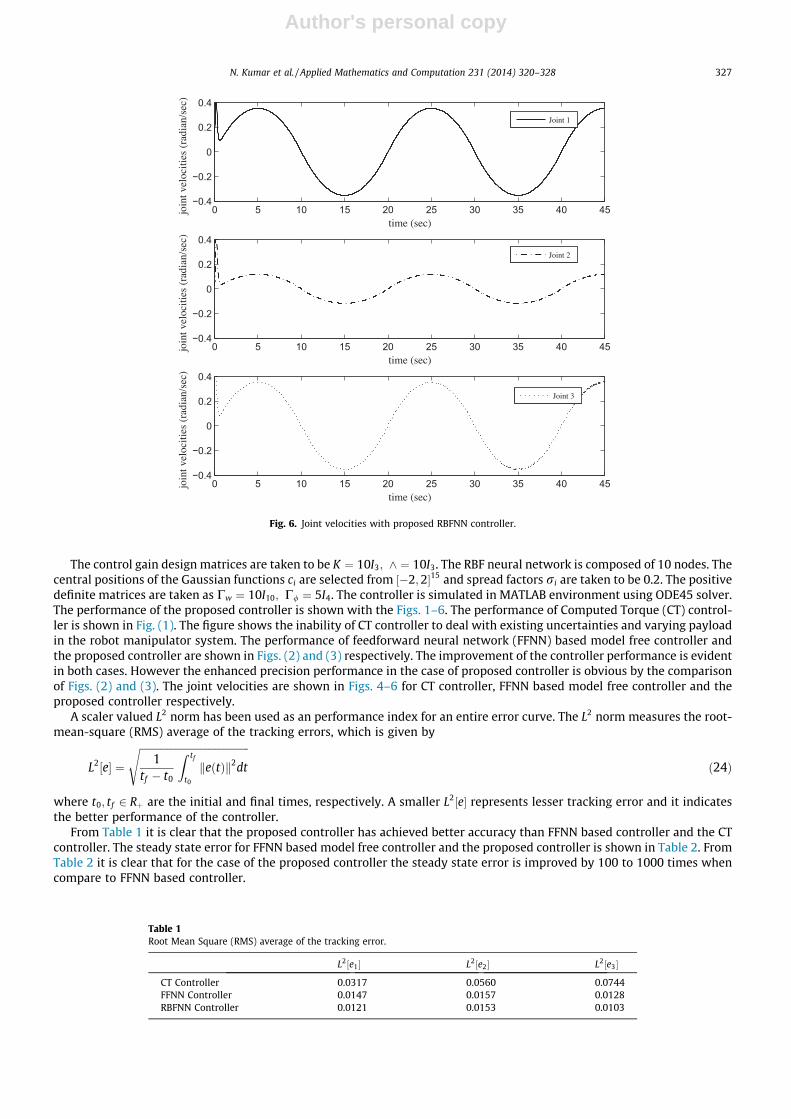
The control gain design matrices are taken to be K ¼ 10I3; ^ ¼ 10I3. The RBF neural network is composed of 10 nodes. Thecentral positions of the Gaussian functions ci are selected from ½�2;2�15 and spread factors ri are taken to be 0.2. The positivedefinite matrices are taken as Cw ¼ 10I10; C/ ¼ 5I4. The controller is simulated in MATLAB environment using ODE45 solver.The performance of the proposed controller is shown with the Figs. 1–6. The performance of Computed Torque (CT) control-ler is shown in Fig. (1). The figure shows the inability of CT controller to deal with existing uncertainties and varying payloadin the robot manipulator system. The performance of feedforward neural network (FFNN) based model free controller andthe proposed controller are shown in Figs. (2) and (3) respectively. The improvement of the controller performance is evidentin both cases. However the enhanced precision performance in the case of proposed controller is obvious by the comparisonof Figs. (2) and (3). The joint velocities are shown in Figs. 4–6 for CT controller, FFNN based model free controller and theproposed controller respectively.
A scaler valued L2 norm has been used as an performance index for an entire error curve. The L2 norm measures the root-mean-square (RMS) average of the tracking errors, which is given by
L2½e� ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
tf � t0
Z tf
t0
keðtÞk2dt
sð24Þ
where t0; tf 2 Rþ are the initial and final times, respectively. A smaller L2½e� represents lesser tracking error and it indicatesthe better performance of the controller.
From Table 1 it is clear that the proposed controller has achieved better accuracy than FFNN based controller and the CTcontroller. The steady state error for FFNN based model free controller and the proposed controller is shown in Table 2. FromTable 2 it is clear that for the case of the proposed controller the steady state error is improved by 100 to 1000 times whencompare to FFNN based controller.
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 1
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 2
0 5 10 15 20 25 30 35 40 45−0.4
−0.2
0
0.2
0.4
time (sec)
join
t vel
ociti
es (
radi
an/s
ec)
Joint 3
Fig. 6. Joint velocities with proposed RBFNN controller.
Table 1Root Mean Square (RMS) average of the tracking error.
L2½e1� L2½e2� L2½e3�
CT Controller 0.0317 0.0560 0.0744FFNN Controller 0.0147 0.0157 0.0128RBFNN Controller 0.0121 0.0153 0.0103
N. Kumar et al. / Applied Mathematics and Computation 231 (2014) 320–328 327

Author's personal copy
6. Conclusion
In this paper, a hybrid approach, consisting of a model based controller and its fusion with RBF neural network based con-troller, is proposed to enhance precision performance of trajectory tracking control of robot manipulators. The controller isable to learn the existing structured and unstructured uncertainties in the system in online manner. The RBF network learnsthe unknown part of the robot dynamics with no requirement of the offline training. The adaptive bound part is used to esti-mate the unknown bounds on unstructured uncertainties and neural network reconstruction error. The overall system isproved to be asymptotically stable using Lyapunov function generated by weighting matrices. Finally, the numerical simu-lation results are produced with various controllers and the effectiveness of the proposed controller is shown in a compar-ative study for the case of a Microbot type robot Manipulator. Through simulation study it is concluded that the proposedcontroller is able to enhance precision performance as compared to model free neural network based controller.
References
[1] K.J. Astrom, T. Hugglund, Automatic tuning of simple regulators with specifications on phase and amplitude margins, Automatica 20 (5) (1984) 645–651.
[2] G.L. Luo, G.N. Saridis, L-Q design of PID controllers for robot arms, IEEE J. Rob. Autom. RA-I (3) (1985) 152–159.[3] Y.X. Su, D. Sun, B.Y. Duan, Design of an enhanced nonlinear PID controller, Mechatronics 15 (2005) 1005–1024.[4] Y. Karayiannidis, Z. Doulgeri, Model-free robot joint position regulation and tracking with prescribed performance guarantees, Rob. Auton. Syst. 60 (2)
(2012) 214–226.[5] F.L. Lewis, D.M. Dawson, C.T. Abdallah, Robot Manipulator and Control – Theory and Practice, Marcel Dekker, 2004.[6] J.J.E. Stoline, The robust control of robot manipulators, Int. J. Rob. Res. 4 (4) (1985) 49–64.[7] M.W. Spong, M. Vidyasagar, Robust linear compensator design for nonlinear robotic control, IEEE Trans. Rob. Autom. 3 (4) (1987) 345–351.[8] H.S. Choi, Robust control of robot manipulators with torque saturation using fuzzy logic, Robotica 19 (6) (2001) 631–639.[9] R. Burkan, I. Uzmay, Upper bounding estimation for robustness to the parameter uncertainty in trajectory control of robot arm, Rob. Auton. Syst. 45 (2)
(2003) 99–110.[10] F. Garelli, L. Gracia, A. Sala, P. Albertos, Sliding mode speed auto-regulation technique for robotic tracking, Rob. Auton. Syst. 59 (7–8) (2011) 519–529.[11] D. Mahayana, S. Anwari, Robust adaptive control for robotic manipulator based on chattering free variable structure system, in: Proceedings of the
International Conference on Electrical Engineering and Informatics, IEEE, US, 2009, pp. 247–252.[12] K. Kaneko, R. Horowitz, Repetitive and adaptive control of robot manipulators using velocity estimation, IEEE Trans. Rob. Autom. 13 (2) (1997) 204–
217.[13] C.C. Cheah, C. Liu, J.J.E. Stoline, Adaptive jacobian tracking control for robots with uncertainties in kinematic, dynamic and actuator models, IEEE Trans.
Autom. Control 51 (6) (2006) 1024–1029.[14] F. Lewis, S. Jagannathan, A. Yesildirek, Neural Network Control of Robot Manipulators and Nonlinear Systems, Taylor and Francis, 1999.[15] X. Ren, F.L. Lewis, S.S. Ge, J. Zhang, Neural network feedforward control for mechanical systems with external disturbances, in: 46th IEEE Conference on
Decision and Control, IEEE, US, 2007, pp. 4687–4692.[16] G. Debbache, A. Bennia, N. Golea, Neural networks-based adaptive state feedback control of robot manipulators, Int. J. Comput. Commun. Control II (4)
(2007) 328–339.[17] K. Hornic, M. Stinchcombe, H. Whitw, Multilayer feedforward networks are universal approximators, Neural Networks 2 (1989) 359–369.[18] J. Park, J.W. Sandberg, Universal approximation using radial basis function networks, Neural Comput. 3 (1991) 246–257.[19] P.M. Patre, S. Bhasin, Z.W. Wilcox, W.E. Dixon, Composite adaptation for neural-network based controllers, IEEE Trans. Autom. Control 55 (4) (2010)
944–950.[20] Z.H. Jiang, T. Ishita, A neural network controller for trajectory control of industrial robot manipulators, J. Comput. 3 (8) (2008) 1–8.[21] V. Panwar, Asymptotic trajectory tracking for a robot manipulator using rbf neural network and adaptive bound on disturbances, in: Proceedings of the
International Conference on Mechanical and Electrical Technology, IEEE, US, 2010, pp. 156–160.[22] G. Feng, C.K. Chak, Robot tracking in task space using neural networks, in: Proceedings of the IEEE Conference on Neural Networks, IEEE, US, 1994, pp.
2854–2858.[23] T. Holcomb, M. Morari, Local training of radial basis function neural networks: toward solving the hidden unit problem, in: Proceedings of the
American Control Conference, IEEE, US, 1991, pp. 2331–2336.[24] J.J.E. Slotine, W. Li, Applied Nonlinear Control, Prentice-Hall, 1991.[25] W. Wolovich, Robotics: Basic Analysis and Design, Holt, Rinehart and Winston, 1987.
Table 2Steady state error.
e1 e2 e3
FFNN Controller Oð10�5Þ Oð10�3Þ Oð10�4ÞRBFNN Controller Oð10�7Þ Oð10�6Þ Oð10�6Þ
328 N. Kumar et al. / Applied Mathematics and Computation 231 (2014) 320–328
Related Documents










