DINAMIKA TEKNIK O 2 A 2 3 4 P T 2 B • Holowenko; Dynamic of machinery; John Wiley; New York POKOK BAHASAN : Pengenalan umum, Hukum Newton dan prinsip D’Alembert, Analisis gaya statis pada partikel dan mekanika mesin, Analisis gaya gesekan dan inersia, Perhitungan roda daya, Perhitungan bobot balans, Giroskop TUJUAN : Menguasai dan mampu menyelesaikan permasalahan gaya-gaya pada gerak partikel dan mekanika mesin DAFTAR PUSTAKA : • Martin, George; Kinematic and dynamic of machine; Mc. Graw Hills; New York • Timoshenko & DH. Young; Engineering mechanics; Mc. Graw Hills; New York

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

DINAMIKA TEKNIK
O2
A
2 3
4
P
T2 B
• Holowenko; Dynamic of machinery; John Wiley; New York
POKOK BAHASAN : Pengenalan umum, Hukum Newton dan prinsip
D’Alembert, Analisis gaya statis pada partikel dan mekanika mesin,
Analisis gaya gesekan dan inersia, Perhitungan roda daya,
Perhitungan bobot balans, Giroskop
TUJUAN : Menguasai dan mampu menyelesaikan permasalahan
gaya-gaya pada gerak partikel dan mekanika mesin
DAFTAR PUSTAKA :
• Martin, George; Kinematic and dynamic of machine; Mc. Graw
Hills; New York
• Timoshenko & DH. Young; Engineering mechanics; Mc. Graw
Hills; New York
Dinamika adalah cabang ilmu mekanika yang mempelajari gaya-
gaya dalam mesin.
Gaya-gaya dalam mesin dapat timbul dari :
• Gravitasi
• Proses perakitan
• Beban
• Transfer tenaga
• Gesekan
• Kelembaman
• Pegas
• Impak
• Temperatur
1. PENDAHULUAN
Gaya berhubungan dengan percepatan, sehingga dinamika
memerlukan pengetahuan tentang gerak benda.

TEORI-TEORI DASAR Karena mempelajari gaya maka banyak dipakai Hukum
Newton tentang gerak
Teori penunjang :
• Aljabar vektor
• Mekanisme perpindahan gaya
• Kalkulus
• Aljabar matriks
• Menggambar teknik/mesin
Sistem satuan :
• Satuan dasar :
• Satuan turunan :
Massa (M), Panjang (L), Waktu (T)
Gaya (MLT2), Percepatan (L/T2)
2. GAYA STATIKA DAN STATIKA GRAFIS
Analisa gaya :
• Gaya diproyeksikan dalam sistem koordinat (2D atau 3D)
• Mengacu pada sistem keseimbangan :
- Jumlah gaya-gaya yang bekerja harus nol
- Jumlah momen di suatu titik harus nol
Fx,y,z = 0
M = 0
• Gaya dianggap sebagai vektor :
- Memiliki harga/kuantitas
- Memiliki titik tangkap pada garis kerjanya
- Memiliki arah
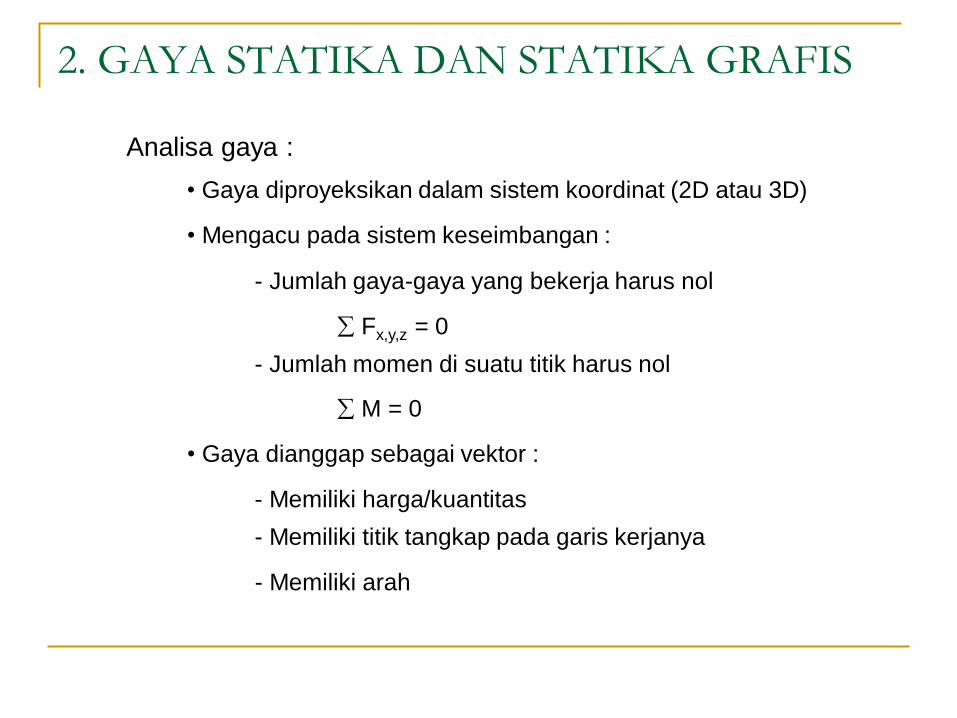
KOPEL • Kopel adalah dua gaya yang sama besar, paralel dan
berlawanan arah
F
F
h
O
x
• Gaya resultannya nol
• Momen kedua gaya tersebut adalah konstan, tanpa
memperdulikan titik acuan kerja momen

• Penyelesaian grafis untuk resultannya adalah nol jika
poligon gayanya berupa kurva tertutup
TIGA GAYA TAK SEJAJAR DALAM
KESEIMBANGAN
F1
F3
F2 F
1F
3
F2
OF
• Jika gaya-gaya membentuk kopel maka resultannya
nol, tetapi poligonnya tidak tertutup
• Jika gaya-gaya berpotongan di satu titik, maka momen
terhadap titik tersebut sama dengan nol

EMPAT GAYA TAK SEJAJAR DALAM
KESEIMBANGAN
• Berdasarkan keseimbangan momen titik m :
3 VARIABEL TAK DIKETAHUI
F1
F2
F3
F4
a
b
m
a
b
“F2”
“F1”
a
b
F
F
2
1
Hanya harga F2 yang
ditentukan di atas
b
aFF 12
• F1 diketahui besar dan arahnya, yang lain hanya arahnya saja
yang diketahui
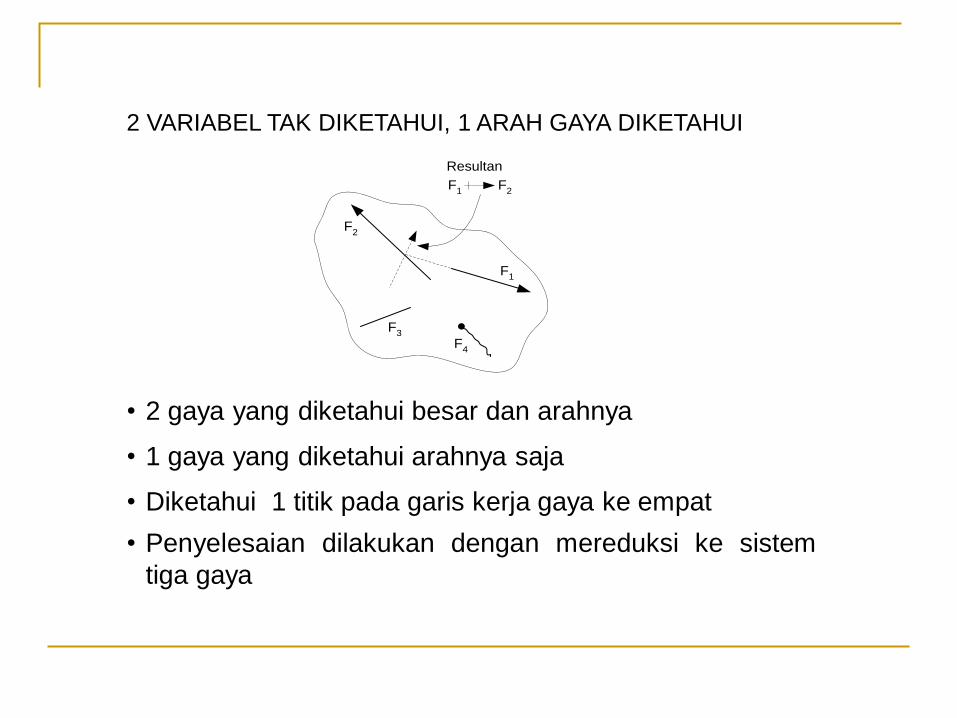
2 VARIABEL TAK DIKETAHUI, 1 ARAH GAYA DIKETAHUI
F1
F2
Resultan
F4
F2
F1
F3
• 2 gaya yang diketahui besar dan arahnya
• 1 gaya yang diketahui arahnya saja
• Diketahui 1 titik pada garis kerja gaya ke empat
• Penyelesaian dilakukan dengan mereduksi ke sistem
tiga gaya

GAYA-GAYA PARALEL
a
b
P
F1
F2
a
b
F1
F2
P
F1
F2
P
OF
• P diketahui, F1 dan F2 tidak diketahui
• Penerapan persamaan momen titik O : a
b
F
P
2

RESULTAN DUA GAYA
P1
(a)
P2
b
P1
(b)
P2
b
x
P1 + P
2
x
P1 + P
2
P2
o
oP
1 + P
2
d
(c)
P1
P2
R1
R2
S’ S”
P1
P2
S’P1
Resultan
S”P2
Resultan
(d)
• Penerapan persamaan momen titik O : 21
2
PP
P
b
x
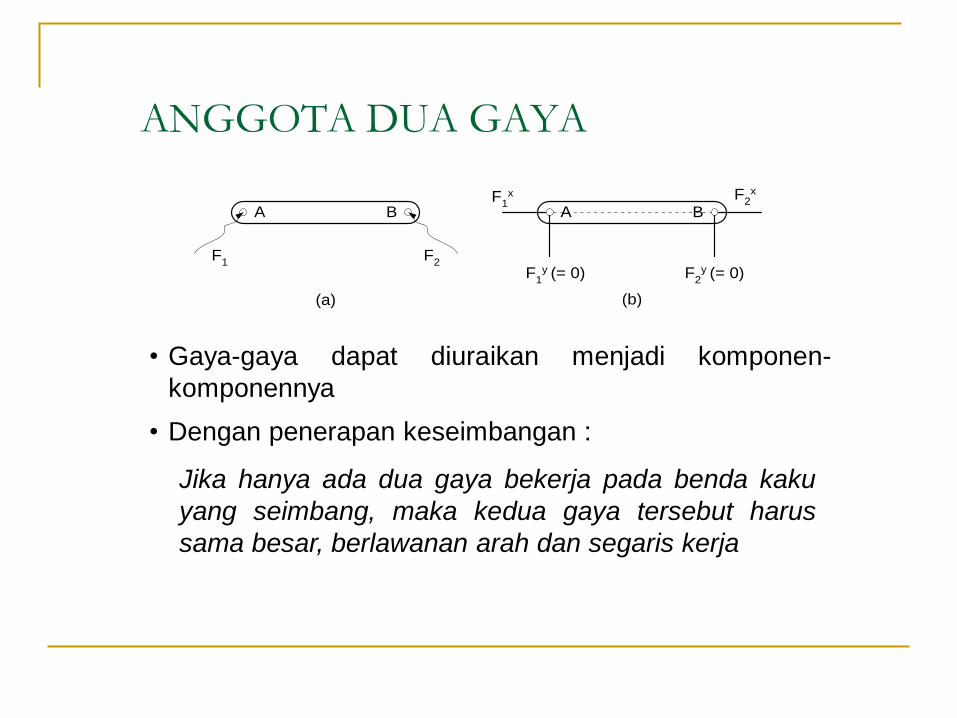
ANGGOTA DUA GAYA
F1
F2
A B
(a) (b)
A BF
1x F
2x
F1y (= 0) F
2y (= 0)
• Gaya-gaya dapat diuraikan menjadi komponen-
komponennya
• Dengan penerapan keseimbangan :
Jika hanya ada dua gaya bekerja pada benda kaku
yang seimbang, maka kedua gaya tersebut harus
sama besar, berlawanan arah dan segaris kerja
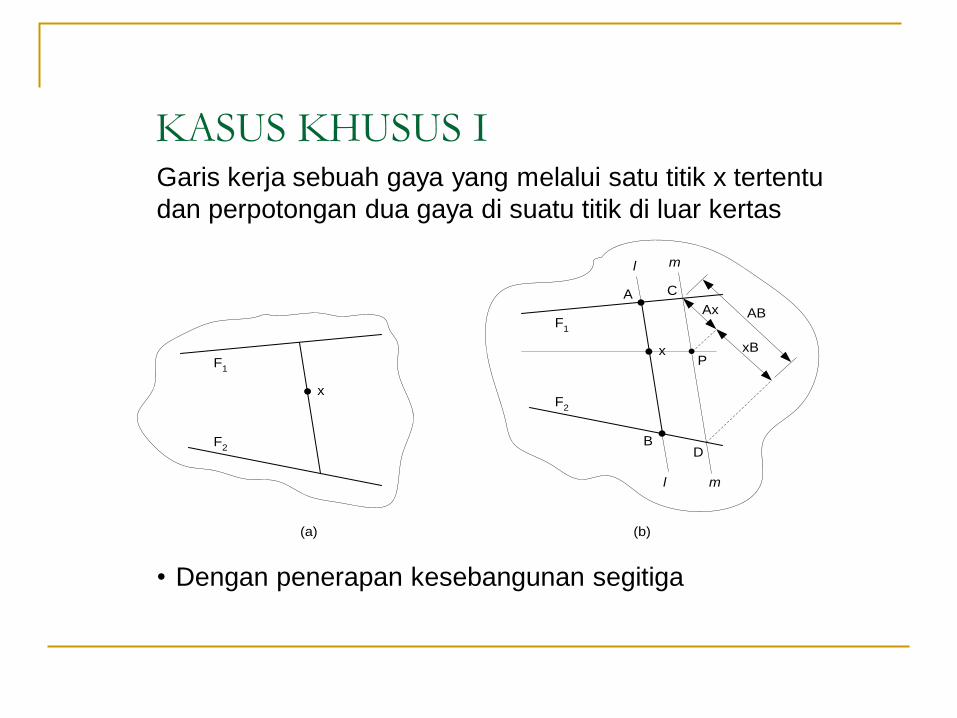
KASUS KHUSUS I Garis kerja sebuah gaya yang melalui satu titik x tertentu
dan perpotongan dua gaya di suatu titik di luar kertas
F1
(a)
F2
x
F1
F2
x
BD
A C
P
Ax
xB
AB
m
ml
l
(b)
• Dengan penerapan kesebangunan segitiga

KASUS KHUSUS II
Dua buah gaya yang diketahui, F1 dan F2, yang hampir sejajar
P2
P1
S”
S’a
R = P1
P2
P2
S”
P1
S’ "' ss
(a)
(b)
P2
P1
R
Penyelesaian dengan poligon gaya

3. GAYA-GAYA STATIS DALAM MESIN
RODA GIGI LURUS SEDERHANA
A
B
Sudut tekan
A (penggerak)
Lingkaran
jarak bagi
Lingkaran dasar
roda gigi A
B (yang digerakkan)
Lingkaran
jarak bagi
Lingkaran dasar
roda gigi A
(a)
A
B
A
B
R
R
FT
FR
FT
FR
Kopel yang dikenakan
ke roda gigi A
Kopel yang dikenakan
ke roda gigi B
(b)

PENA
P
P
(a) (b)
P
(c)
Gaya resultan
P
(a). Gesekan dan berat pena diabaikan
(b). Setiap gaya diferensial tegak lurus permukaan dan melalui
pusat pena
(c). Gaya resultan tidak melalui pusat pena jika gesekan disertakan

ANGGOTA LUNCUR/TORAK
P
(a) (b)
N
Reaksi
resultanN
P
Reaksi
resultan
(a). Gesekan diabaikan, gaya reaksi tegak lurus ke permukaan
kontak
(b). Gesekan tidak diabaikan, gaya resultan miring terhadap
garis vertikal :
N
Ntan

MEKANISME ENGKOL PELUNCUR
O2
A
2 3
4
P
T2 B
(a)
F23
F43
3
A
B
F34
B
F14
P
4F32
A
2
O2
T2 = ?
F12 (b)
P OF
F34
F14
(c)
F43
F32
F34
F23
F12
A
O2
2T2
(d)
F12
F32
h
Prosedur :
1. Buat diagram benda
bebas
2. Jika variabel < 3. maka
diterapkan persamaan
keseimbangan
3. Jika variabel > 3. maka
perlu informasi tambahan
dengan mengisolasi
masing-masing gaya
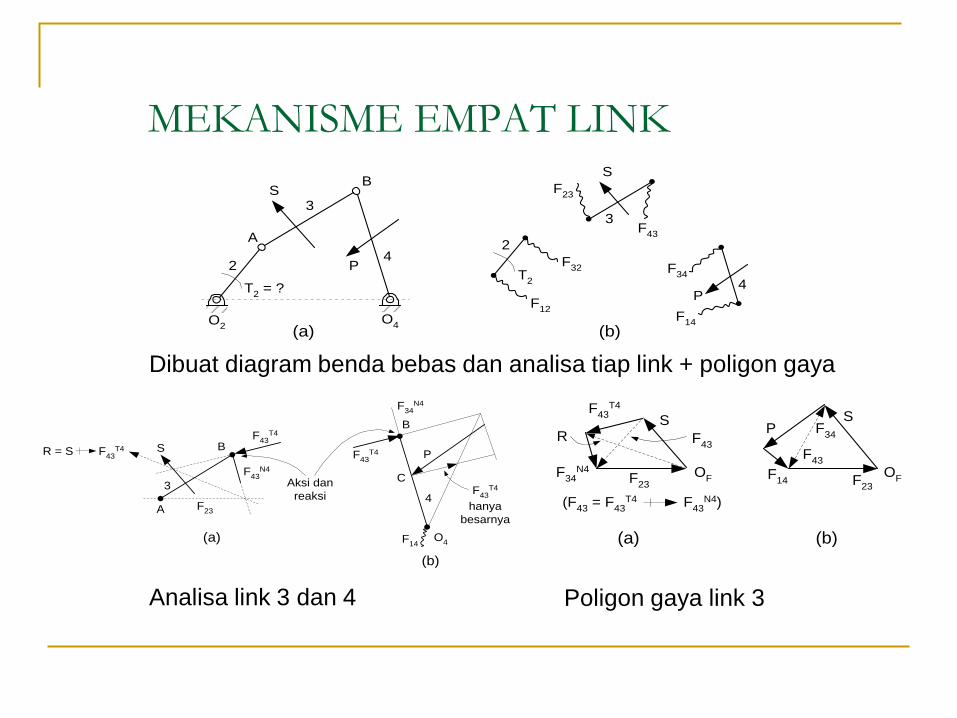
MEKANISME EMPAT LINK
O2
O4
T2 = ?
2
3
4
A
BS
P
(a)
T2
2
F32
F12
3
S
F43
F23
4P
F14
F34
(b)
Dibuat diagram benda bebas dan analisa tiap link + poligon gaya
3
A
S
F23
BF
43T4
F43
N4
(a)
F43
T4
4F
43T4
hanya
besarnya
O4F
14
(b)
C
B
P
F34
N4
Aksi dan
reaksi
R = S F43
T4
Analisa link 3 dan 4
F34
N4
F43
T4
SR
F23
OF
F43
F23
(a) (b)
PS
F43
F34
OFF
14
(F43
= F43
T4 F43
N4)
Poligon gaya link 3
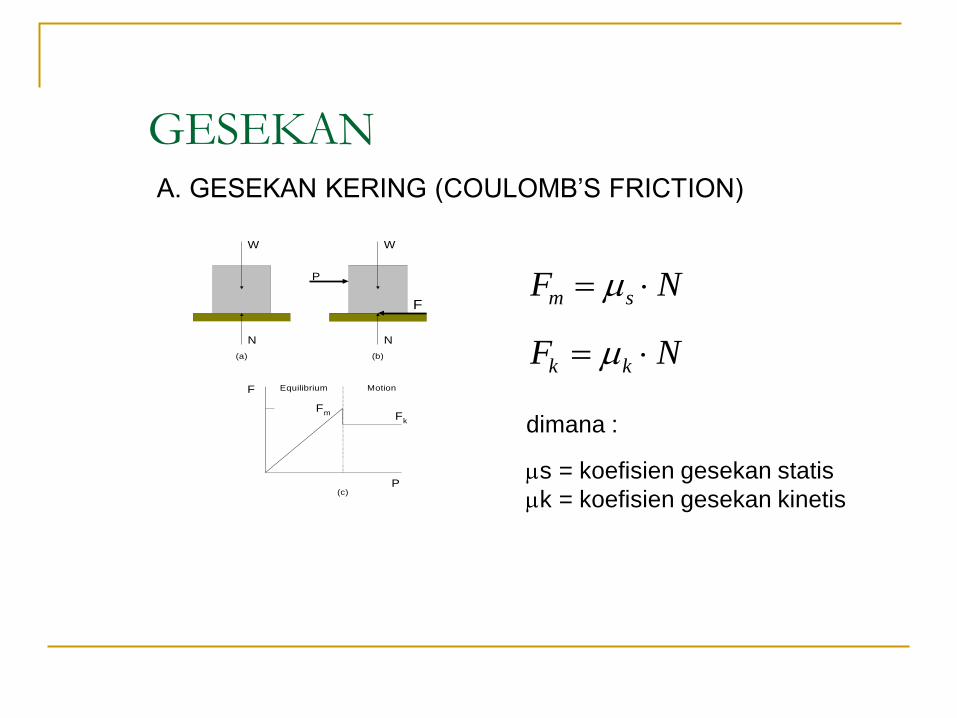
GESEKAN A. GESEKAN KERING (COULOMB’S FRICTION)
W
N
(a)
W
N
(b)
P
F
F
Fm F
k
P
Equilibrium Motion
(c)
NF sm
NF kk
s = koefisien gesekan statis
k = koefisien gesekan kinetis
dimana :
B. GESEKAN FLUIDA
• Penerapan pada mesin adalah masalah pelumasan
• Besar gesekan tergantung pada kecepatan, tekanan,
viskositas dan temperatur
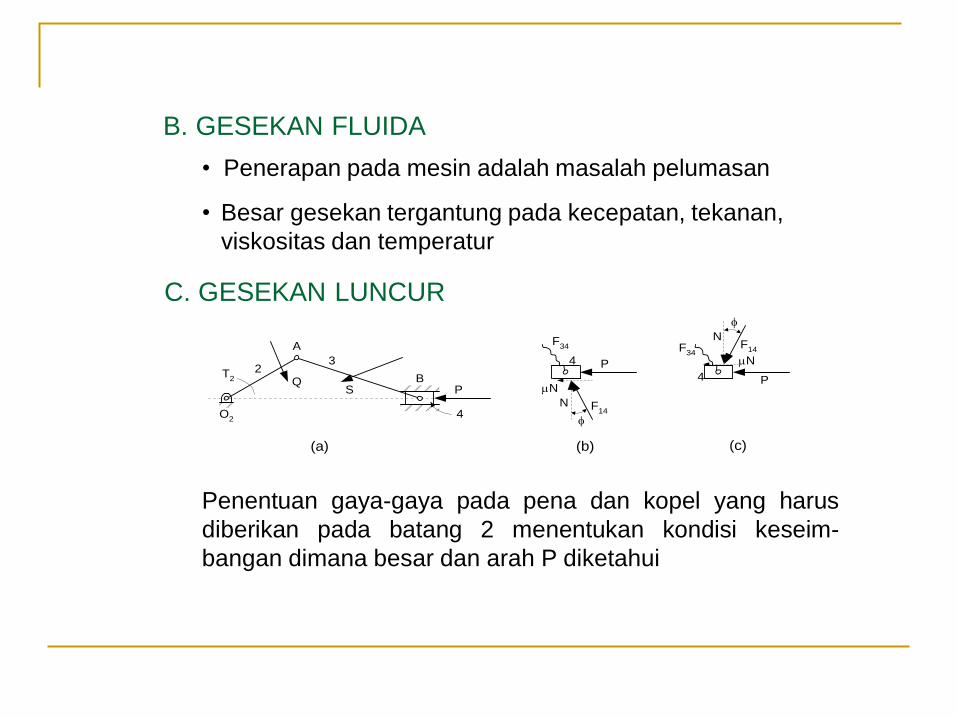
C. GESEKAN LUNCUR
O2
A
23
4
P
T2 B
(a)
P
F34
4
N
NS
Q
(b)
P
F34
4
N
N
(c)
F14
F14
Penentuan gaya-gaya pada pena dan kopel yang harus
diberikan pada batang 2 menentukan kondisi keseim-
bangan dimana besar dan arah P diketahui
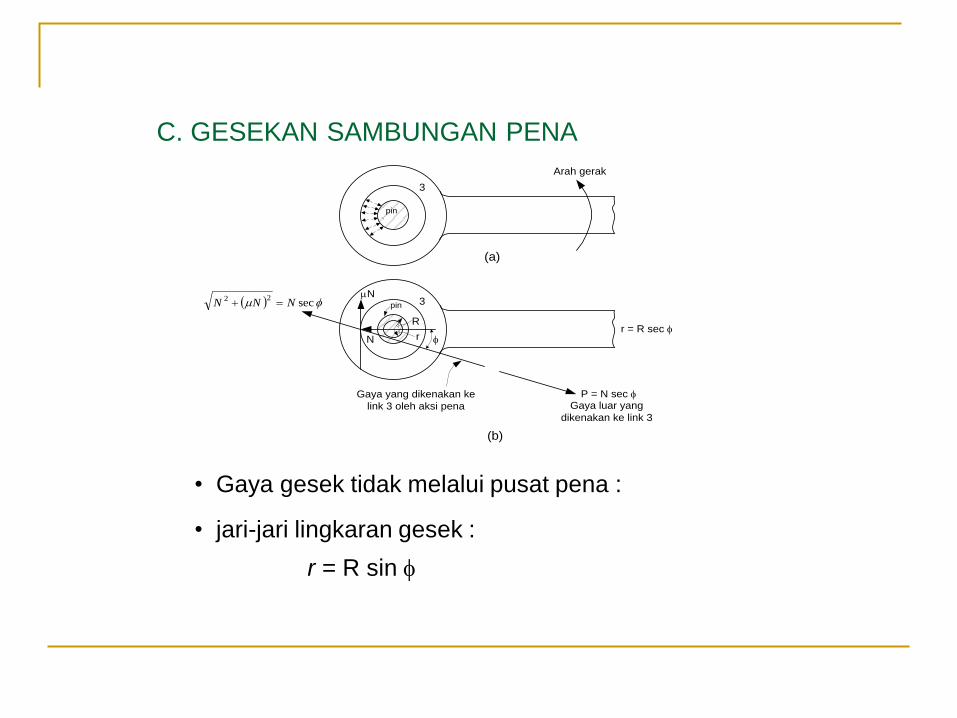
C. GESEKAN SAMBUNGAN PENA
pin
3
Arah gerak
pin 3
(a)
R
rN
N
sec22
NNN
r = R sec
Gaya yang dikenakan ke
link 3 oleh aksi pena Gaya luar yang
dikenakan ke link 3
P = N sec
(b)
• Gaya gesek tidak melalui pusat pena :
• jari-jari lingkaran gesek :
r = R sin

ANALISA GESEKAN PENA PADA
MEKANISME ENGKOL PELUNCUR
4
P
B
3
bertambah
mengecil
AT
2
Lingkaran gesek
Arah gerak link 4
O2
Lingkaran
gesek2
(a)
B
3A
Lingkaran
gesek
Lingkaran
gesek
1
B
3
A
2
B
3A
3
B
3
A
4
B
3
A
F43
34 (c)
B
(d)
3
F23
34A
F43
4
F14
P
B
Link 3P
F34
OF
F14
(e)
A
2
2
F32
F12
(f)
POF
F14
43
32
F
F
34
23
12
F
F
F
(g)

4. GAYA-GAYA INERSIA
(a) (b)
P
x
y
A
r
AA
dM (r2)
(dM) AA
(dM) r
Ag
MAg
m
n
h
h
Lokasi Mag
yang salah
Lokasi gaya resultan
yang benar
A. GAYA DALAM GERAK BIDANG
Dari penurunan rumus pada persamaan 4-1) hingga 4-10)
dapat diinterpretasikan bahwa gaya resultan = M . Ag pada
posisi h yang memberikan momen terhadap titik berat = I
ggg A
k
MA
Mk
MA
Ih
22
Dimana h dirumuskan sebagai :

B. GAYA INERSIA
1. Gaya inersia merupakan gaya kebalikan gaya resultan
yang memenuhi prinsip keseimbangan D’Alembert.
h
G 2
F1
F2
h
G 2
F1
F2
Percepatan
titik berat = Ag
Gaya
resultan = MAg
(a) (b)
Ag
MAg
2. Pada faktanya terdapat percepatan yang menyebabkan
sistem tidak seimbang.
3. Untuk kepentingan analisa, sistem dianggap seimbang
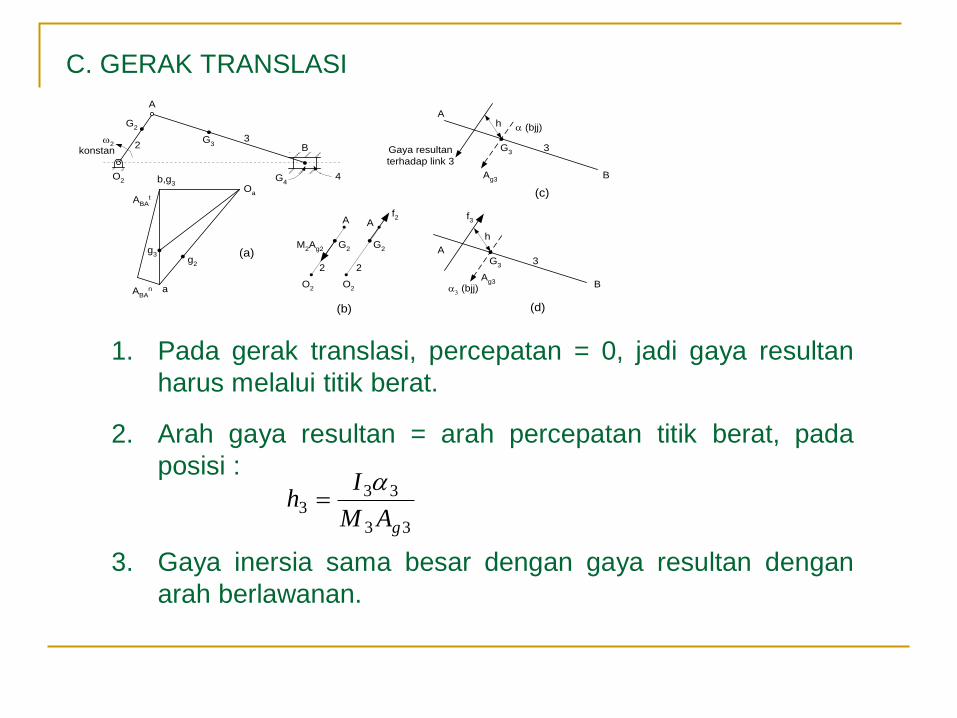
C. GERAK TRANSLASI
1. Pada gerak translasi, percepatan = 0, jadi gaya resultan
harus melalui titik berat.
O2
A
23
4
2
B
(a)
konstan
G2
G3
G4
g3
Oa
g2
b,g3
ABA
t
ABA
nO
2O
2
22
G2
G2
AAf2
M2A
g2
(b)
A
3
B
G3
Ag3
(bjj)h
A3
B
G3
Ag3
(bjj)
h
f3
Gaya resultan
terhadap link 3
(c)
(d)
a
2. Arah gaya resultan = arah percepatan titik berat, pada
posisi :
33
333
gAM
Ih
3. Gaya inersia sama besar dengan gaya resultan dengan
arah berlawanan.

D. PENENTUAN MOMEN INERSIA MASSA
1. Matematis, dengan memakai hubungan dasar I = dM r2.
Cara ini dilakukan jika komponen masih dalam taraf desain 2. Eksperimen, pengecekan komponen yang telah didesain
(a)
G
(b)
O
r
W
G
2
W sin W sin
Contoh : kasus gambar di atas
Penerapan keseimbangan momen di titik O : g
WrTWrI
22
2

SISTEM EKUIVALEN KINETIK
• Massa yang sama
• Posisi titik berat sama
• Momen inersia yang sama
h1
h2
m1
m2
G
Massa = m
(a)
G
m2
Pena engkol
Pena torak m1
G
Massa terpusat = m2
Massa ekuivalen di pena
torak = massa torak + m1
h1
h2
32
(b)
M
4
O2
2
4
h2
Batang tanpa bobot
(c)
• Satu sistem digantikan oleh sistem lain yang ekuivalen
secara kinetik
5. ANALISA LENGKAP SISTEM DINAMIK MEKANISME ENGKOL PELUNCUR
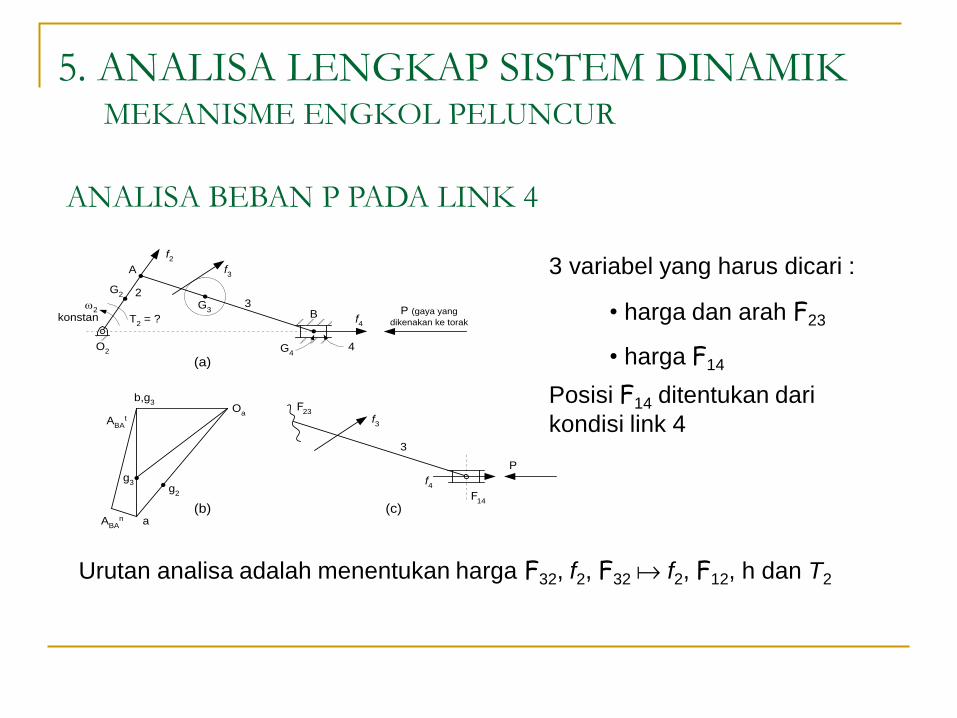
ANALISA BEBAN P PADA LINK 4
O2
A
23
4
2
Bkonstan
G2
G3
G4
T2 = ?
f2
f3
f4
P (gaya yang
dikenakan ke torak
(a)
g3
Oa
g2
b,g3
ABA
t
ABA
n a(b)
3
f3
f4
P
F23
F14
(c)
3 variabel yang harus dicari :
• harga dan arah F23
• harga F14
Posisi F14 ditentukan dari
kondisi link 4
Urutan analisa adalah menentukan harga F32, f2, F32 f2, F12, h dan T2

ANALISA KECEPATAN SUDUT LINK 2
O2
A
23
4
2
Bkonstan
G2
G3
f2
f3
f4 P = ?
(a)
3
f3
f4
P
A
f23 B
f14
O2
A
2
f2
f32
f12
f3
f23
f4
f14
P
Of
(b)
O2
A
2
f2
f32
f12
(c)
Metode analisa sama dengan pembahasan gaya statik
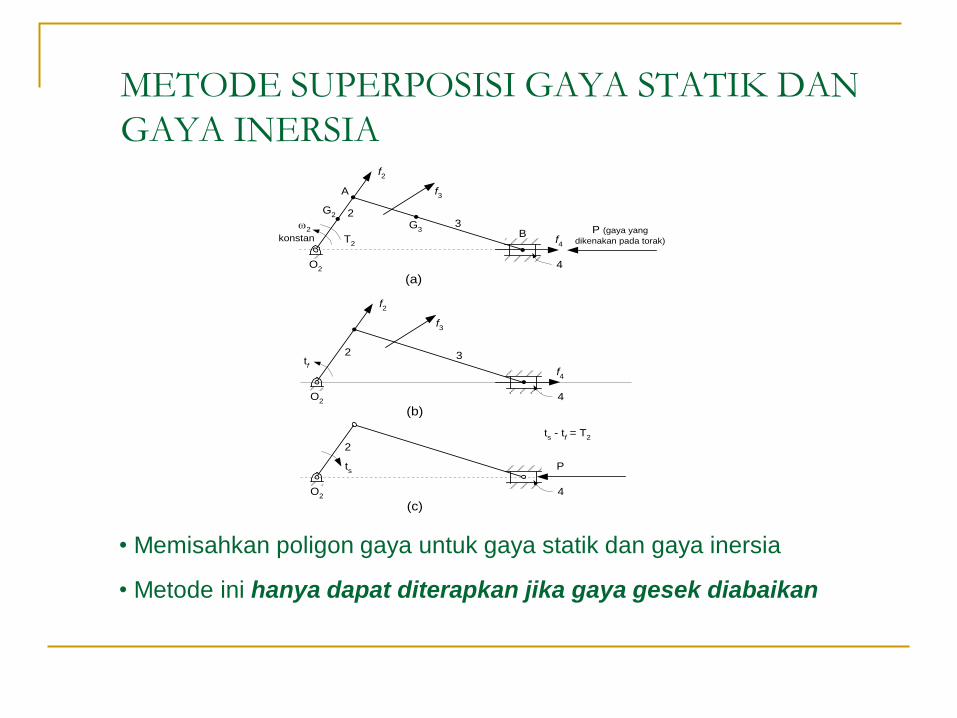
METODE SUPERPOSISI GAYA STATIK DAN
GAYA INERSIA
O2
A
23
4
2
Bkonstan
G2
G3
f3
f4
P (gaya yang
dikenakan pada torak)
(a)
T2
f2
O2
2 3
4
f3
f4
(b)
tf
f2
O2
2
4
P
(c)
ts
ts - t
f = T
2
• Metode ini hanya dapat diterapkan jika gaya gesek diabaikan
• Memisahkan poligon gaya untuk gaya statik dan gaya inersia

GAYA GETAR
• Penjumlahan vektor dari gaya-gaya yang terdapat pada rangka
mesin dengan besar, arah atau keduanya berubah-ubah
• Gaya-gaya pada rangka mesin disebabkan oleh beban statik
dan gaya inersia
• Efek gabungan dapat dilakukan namun seringkali efek inersia
dipisahkan dari efek statik karena pada beberapa kasus, efek
inersia dapat diseimbangkan sebagian atau sepenuhnya
6. ANALISA RODA GILA
• Energi pada mesin dapat diberikan dengan :
- Motor dengan daya besar sesuai kebutuhan tetapi mahal
- Motor kecil dengan dilengkapi roda gila
• Roda gila berfungsi sebagai reservoar energi
• Elemen mesin yang menerapkan energi kinetik dari momen
inersia
• Jika kecepatan mesin berkurang maka roda gila akan
melepaskan energinya
• Contoh terapan :
- Ilustrasi mesin pres pelubang pelat
- Motor bakar
KOEFISIEN FLUKTUASI KECEPATAN
• Yaitu variasi kecepatan yang diijinkan
21
V
VV 21
- Rasio kecepatan sudut :
- Rasio kecepatan :
• Koefisien maksimum yang diijinkan bervariasi :
- 0,2 untuk pompa dan mesin pemecah
- Sampai dengan 0,003 untuk generator bolak-balik
- Dilihat di buku teks atau handbook

BERAT RODA GILA
• Roda gila dianggap pelat bundar rata dan dianalisa
berdasarkan energi kinetiknya
• Berat berdasarkan rasio koefisien fluktuasi kecepatan :
2V
EgW
• Berat berdasarkan rasio kecepatan minimum dan maksimum :
22
21
2
VV
EgW
• Berat rim roda gila sesungguhnya 10% karena efek lengan,
hub dan bagian berputar lainnya
• Kecepatan rata-rata tergantung bahan dan gaya sentrifugal
atau dilihat di buku teks dan handbook
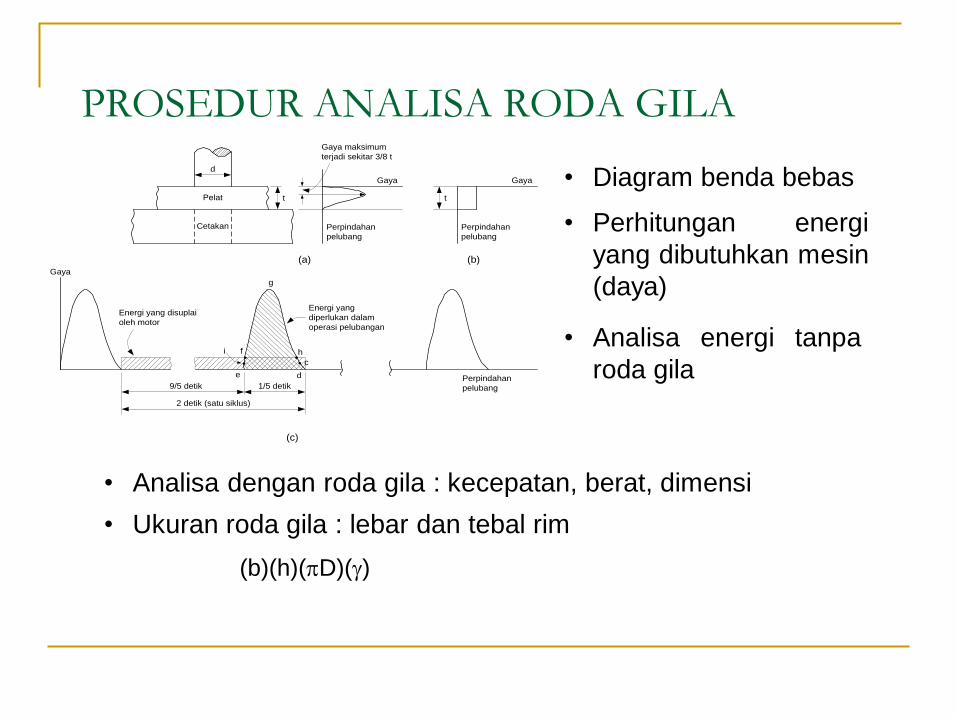
PROSEDUR ANALISA RODA GILA
• Diagram benda bebas
• Perhitungan energi
yang dibutuhkan mesin
(daya)
• Analisa energi tanpa
roda gila
• Analisa dengan roda gila : kecepatan, berat, dimensi
• Ukuran roda gila : lebar dan tebal rim
d
tPelat
Cetakan
(a)
Gaya
Perpindahan
pelubang
Gaya maksimum
terjadi sekitar 3/8 t
t
Gaya
Perpindahan
pelubang
(b)
Gaya
Energi yang disuplai
oleh motor
g
de
h
c
fi
9/5 detik 1/5 detik
2 detik (satu siklus)
Energi yang
diperlukan dalam
operasi pelubangan
(c)
Perpindahan
pelubang
(b)(h)(D)()

7. PENYEIMBANGAN MASSA-
MASSA BERPUTAR Gaya-gaya
dan inersia
Getaran
mesin Peredaman
MASSA PUTAR TUNGGAL
A B
W1
(a)
A B
W1
(b)
W2
W1
R1
O2
W1
R1
O2
W2
R2
Keseimbangan di titik O2 :
W1R1 = W2R2
DUA BEBAN PUTAR
A B
W1
W2
W1
R1
O2
W2
R2
Keseimbangan statik
tetapi belum seimbang
secara dinamik

SISTEM BEBAN JAMAK
W1
W2
W3
a1
Bidang A Bidang B
R3
R2
R1
W1
W2
W3
1
2
3
Bidang ABidang B
(a)b
a1
b(b)
21
1 Rg
W
21
1 Rg
W 21
1 Rg
W
Suatu
kopel
C poros
C poros
b
aR
g
W 121
1
b
aR
g
W 121
1 2
11 R
g
WBidang A Bidang B
(c)
Gaya inersia digantikan dengan gaya-gaya pada dua bidang acuan
R3
R2
R1
W1
W2
W3
1
2
3
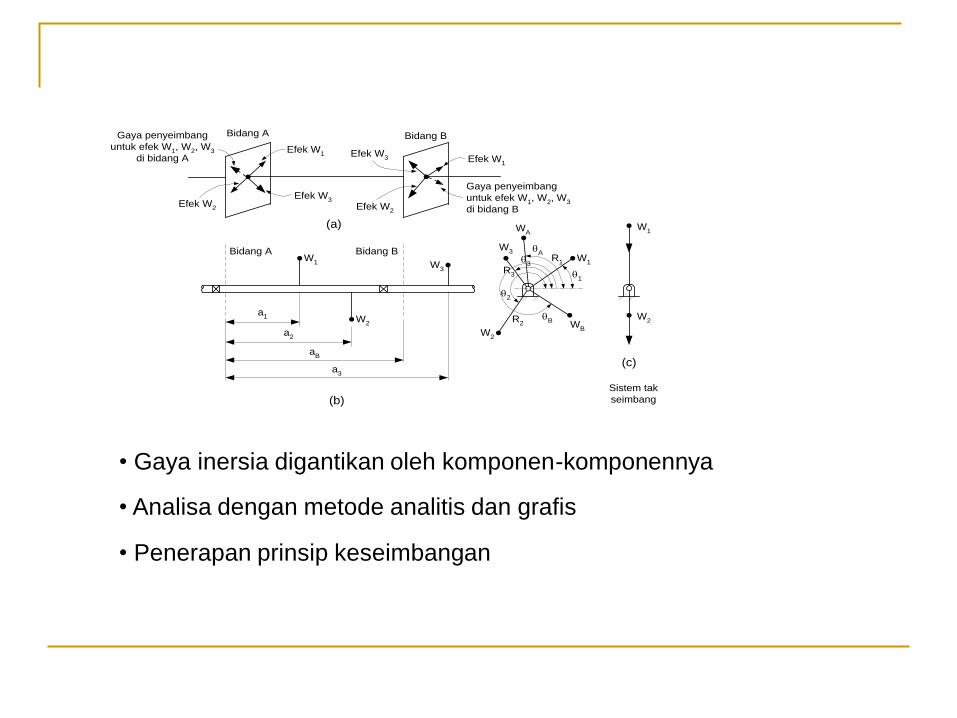
Bidang A Bidang B
(a)
Efek W1
Efek W3
Efek W2
Gaya penyeimbang
untuk efek W1, W
2, W
3
di bidang A
Efek W2
Efek W1
Efek W3
Gaya penyeimbang
untuk efek W1, W
2, W
3
di bidang B
W1
W2
W3
Bidang A Bidang B
a2
a1
aB
a3
B
WB
WA
A
(b)
W1
W2
(c)
Sistem tak
seimbang
• Gaya inersia digantikan oleh komponen-komponennya
• Analisa dengan metode analitis dan grafis
• Penerapan prinsip keseimbangan

METODE ANALITIS
• Keseimbangan gaya horisontal
• Keseimbangan gaya vertikal
• Keseimbangan momen gaya horisontal terhadap bidang A
• Keseimbangan momen gaya vertikal terhadap bidang A
WR cos = 0
WR sin = 0
WR a cos = 0
WR a sin
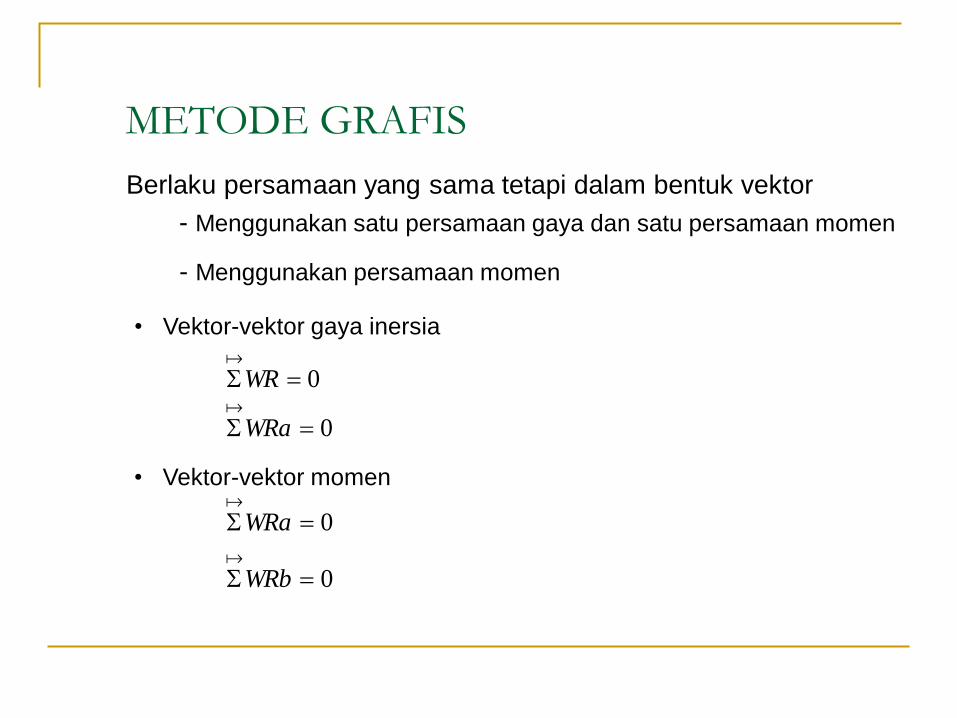
METODE GRAFIS
Berlaku persamaan yang sama tetapi dalam bentuk vektor
• Vektor-vektor gaya inersia
0WR
0WRa
• Vektor-vektor momen
0WRa
0WRb
- Menggunakan satu persamaan gaya dan satu persamaan momen
- Menggunakan persamaan momen
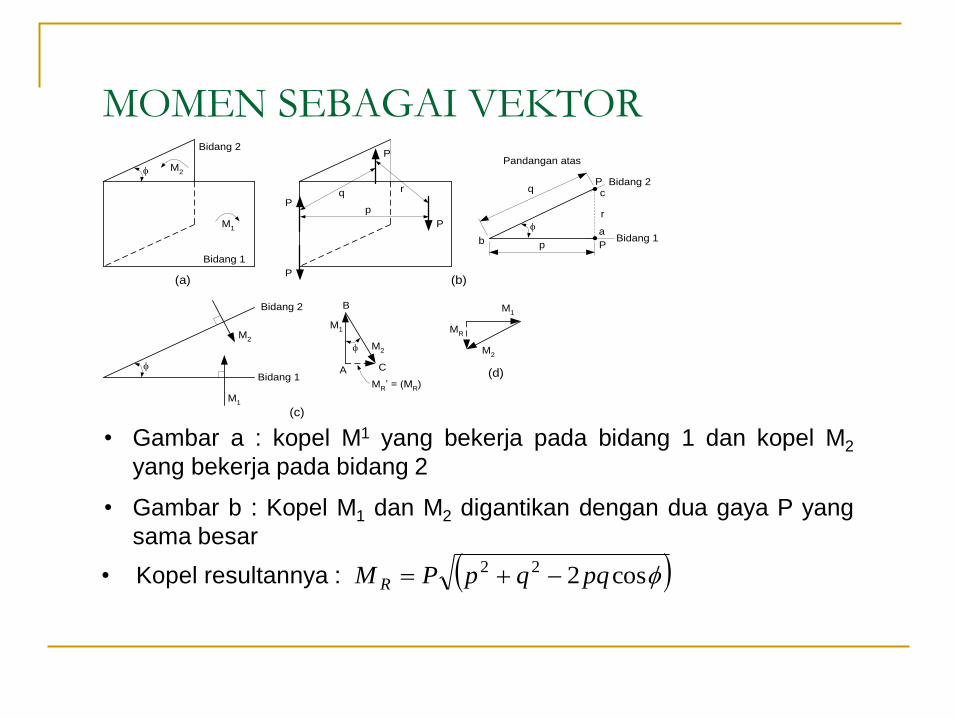
MOMEN SEBAGAI VEKTOR
Bidang 1
Bidang 2
M1
M2
(a)
P
P
P
P
p
q r
(b)
p
q
b Bidang 1
Bidang 2
r
cP
P
a
Pandangan atas
Bidang 1
Bidang 2
(c)
M1
M2
M1
M2
A
B
C
MR’ = (M
R)
M1
M2
MR
(d)
• Gambar a : kopel M1 yang bekerja pada bidang 1 dan kopel M2
yang bekerja pada bidang 2
• Gambar b : Kopel M1 dan M2 digantikan dengan dua gaya P yang
sama besar
• Kopel resultannya : cos222 pqqpPM R
8. GIROSKOP
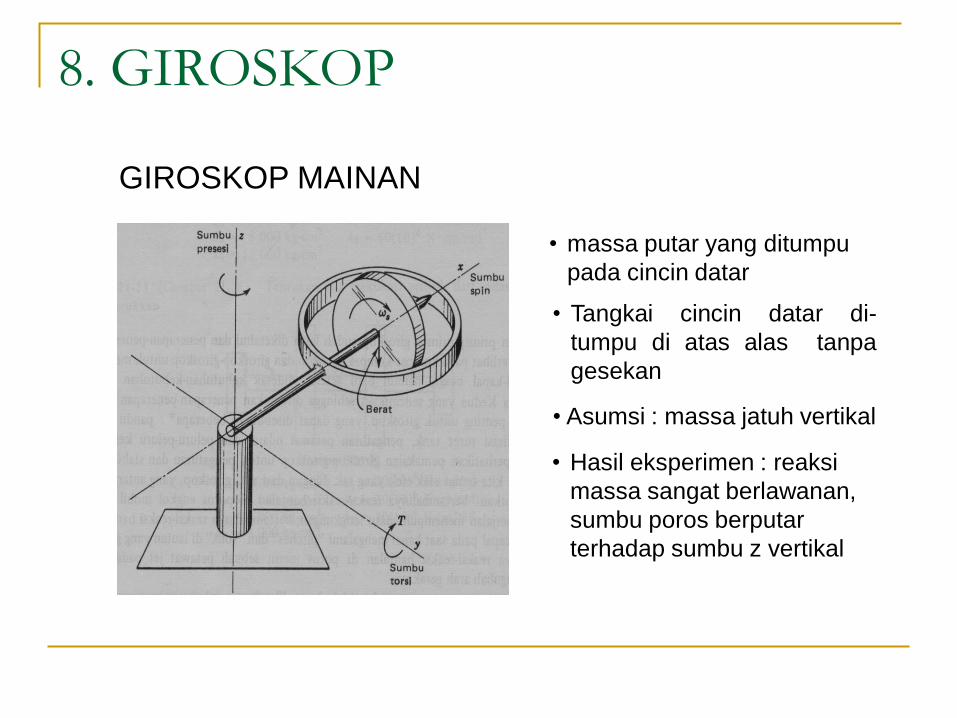
GIROSKOP MAINAN
• massa putar yang ditumpu
pada cincin datar
• Tangkai cincin datar di-
tumpu di atas alas tanpa
gesekan
• Asumsi : massa jatuh vertikal
• Hasil eksperimen : reaksi
massa sangat berlawanan,
sumbu poros berputar
terhadap sumbu z vertikal

PERSAMAAN-PERSAMAAN GIROSKOP DARI
HUKUM NEWTON
• Gerak simultan
terhadap sumbu z
dan sumbu y dapat
dipandang sebagai
dua gerak terpisah :
- Perpindahan
sumbu z akibat
putaran terhadap
sumbu y
- Perpindahan O-x’
ke O-x”

Komponen kecepatan titik P :
• Kecepatan akibat putaran terhadap sumbu y :
V1 = r cos p
• Kecepatan akibat putaran terhadap sumbu z :
V2 = rs
Komponen kecepatan titik P” :
• Kecepatan putaran terhadap sumbu y
V1’ = r cos ( + ) p
• Kecepatan akibat putaran terhadap sumbu yang tegak
lurus ke massa (sumbu z’) :
V2’ = rs

PERUBAHAN KECEPATAN DARI V1 ke V1’ • Perubahan kecepatan menyebabkan percepatan
+zO’, O”
Sumbu y
r cos
V1 = r cos
p
+x
r cos +
V1
' = r cos +p
(a)
V1
V1
'
V1
x = -V1' sin V
1z = V
1 - V
1' cos
(b)
• Percepatan yang terjadi adalah jumlah percepatan dalam arah z
dan x akibat perubahan V1 dalam besar dan arah
sin1 spz
rA
cos2
1 px
rA

PERUBAHAN KECEPATAN DARI V2 ke V2’
• Percepatan yang terjadi disebabkan perubahan arah kecepatan
dalam sumbu x, y dan z
-y
+y
+x
-y
+y
+x’r
P
V2 = r
s
V2
y = + rs cos
V2
x = - rs sin
(a) (b)
-x -x’
V2'y = r
s cos +)
V2' = r
s
+
V2'
x’ = - rs sin ( + )
+x
+z
O,y
V2'z = [r
s sin ( + )] sin
V2'x = -[r
s sin ( + )] cos
V2'x’ = r
s sin ( + )
(c)
A2x = - r(s)2 cos
A2y = - r(s)2 sin
A2x = rs p cos
Komponen percepatan :
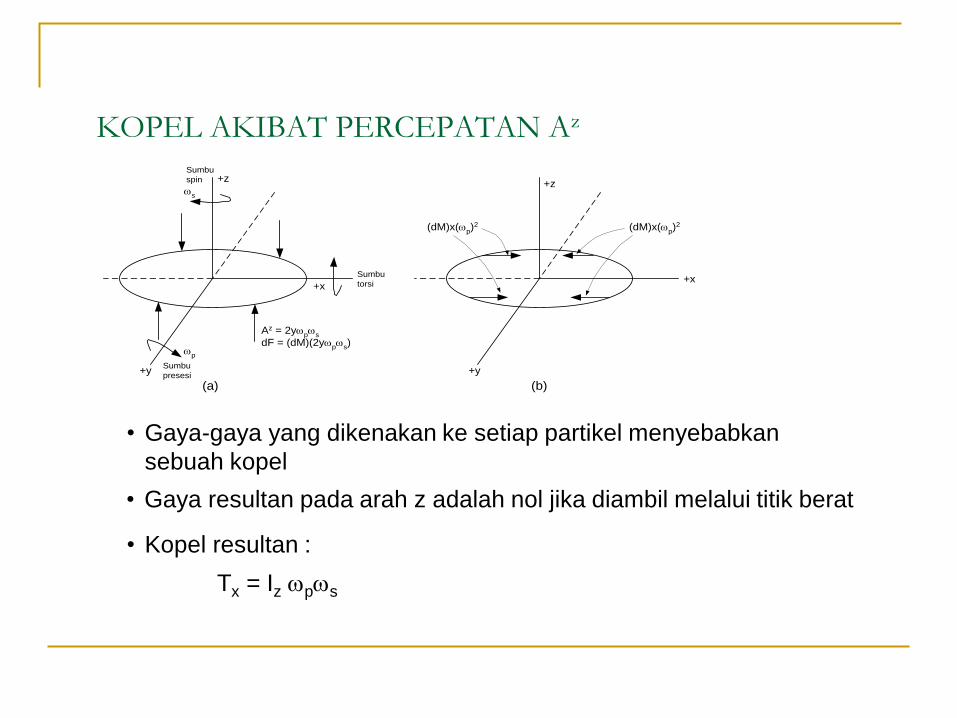
KOPEL AKIBAT PERCEPATAN Az
+x
+y
+z
s
p
Az = 2yp
s
dF = (dM)(2yp
s)
(a) (b)
+x
+y
+z
Sumbu
torsi
Sumbu
presesi
Sumbu
spin
(dM)x(p)2(dM)x(
p)2
• Gaya-gaya yang dikenakan ke setiap partikel menyebabkan
sebuah kopel
• Gaya resultan pada arah z adalah nol jika diambil melalui titik berat
• Kopel resultan :
Tx = Iz ps
GAYA AKIBAT PERCEPATAN An
Jika rangka berputar terhadap suatu sumbu yang melalui titik
berat, maka gaya resultan akibat percepatan normal An = r(s)2
dari setiap partikel adalah nol
GAYA AKIBAT PERCEPATAN A1x
• Akibat putaran terhadap sumbu y
• Gaya resultan sama dengan nol jika sumbu y melalui titik berat rangka
• Momen terhadap sumbu z adalah :
M = (dM)[-x(p)2](y) = -(p)
2 xy (dM)
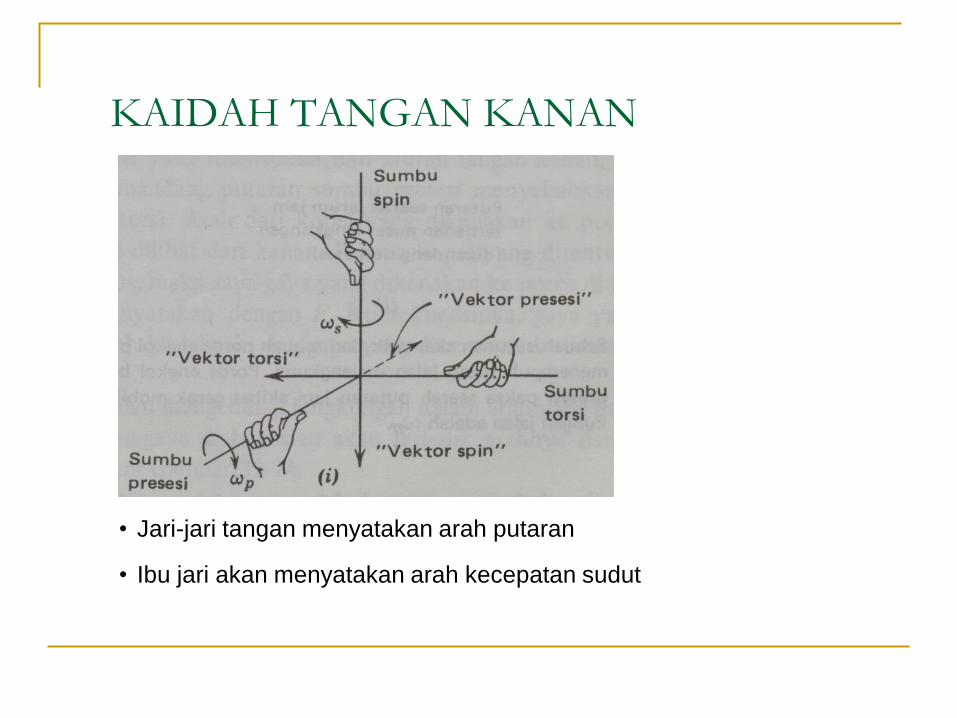
KAIDAH TANGAN KANAN
• Jari-jari tangan menyatakan arah putaran
• Ibu jari akan menyatakan arah kecepatan sudut

CONTOH APLIKASI AKSI GIROSKOP
• Efek pada bantalan-bantalan poros engkol sebuah mobil dalam
menempuh perjalanan mengelilingi suatu lengkungan
• Idealisasi susunan poros engkol, roda gila dan batang hubung osilasi
dilakukan dengan menganggap sistem sebagai sebuah piringan putar
y
x
z
Bantalan belakang
F (dikenakan ke poros engkol)
Vektor torsi
s (spin)
Vektor spin Arah torsi
Pusat
lengkungan
jalan
Bantalan depan
Kecepatan mobil
F (dikenakan ke poros engkol)
p (presesi)
Akibat gerak mobil
mengelilingi lengungkan
dalam arah putaran jarum jam
Related Documents