Universit` a degli Studi di Bologna Facolt` a di Scienze Matematiche, Fisiche e Naturali Corso di laurea in Fisica DESCRIZIONE DINAMICA CON MODELLO CRONOTOPICO DELLA MOBILIT ` A DI INDIVIDUI SU UNO SPAZIO URBANO Tesi di Laurea di: Massimiliano CAPRIOTTI Relatore: Prof. Graziano SERVIZI III Sessione Anno Accademico 2002/2003

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Universita degli Studi di Bologna
Facolta di Scienze Matematiche, Fisiche e Naturali
Corso di laurea in Fisica
DESCRIZIONE DINAMICA CON
MODELLO CRONOTOPICO DELLA
MOBILITA DI INDIVIDUI SU
UNO SPAZIO URBANO
Tesi di Laurea di: Massimiliano CAPRIOTTI
Relatore: Prof. Graziano SERVIZI
III Sessione
Anno Accademico 2002/2003


Indice
1 Stato dell’arte 11
1.1 Primi studi sul comportamento dei pedoni . . . . . . . 11
1.2 Modello a forze sociali . . . . . . . . . . . . . . . . . . 13
1.2.1 Le sue origini . . . . . . . . . . . . . . . . . . . 13
1.2.2 La sua formulazione matematica . . . . . . . . . 14
1.2.3 Simulazioni . . . . . . . . . . . . . . . . . . . . 16
1.3 Modello origine-destinazione . . . . . . . . . . . . . . . 17
1.4 Modello di Luding . . . . . . . . . . . . . . . . . . . . 18
1.5 Oltre al pedone: la citta . . . . . . . . . . . . . . . . . 20
1.5.1 La citta come oggetto . . . . . . . . . . . . . . 20
1.5.2 Visibility Graph Analysis: VGA . . . . . . . . . 22
2 Il modello cronotopico 25
2.1 Modello ad agenti . . . . . . . . . . . . . . . . . . . . . 25
2.2 Definizione di cronotopo . . . . . . . . . . . . . . . . . 26
2.3 Le idee principali del modello . . . . . . . . . . . . . . 27
2.4 Un esame piu approfondito:
citta Manhattan-like . . . . . . . . . . . . . . . . . . . 28
2.4.1 Simulazioni di mobilita urbana
e teoria di campo medio . . . . . . . . . . . . . 31
3 Sviluppo del modello e applicazione sul centro storico
di Rimini 41
3.1 La psicologia del pedone
in relazione al moto in citta . . . . . . . . . . . . . . . 42
3.2 Proprieta di un modello ad agenti . . . . . . . . . . . . 43
3

3.3 Sviluppo e ampliamento degli elementi del modello crono-
topico . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3.1 Il comportamento del pedone nello spazio urbano 45
3.3.2 La scelta delle strade . . . . . . . . . . . . . . . 48
3.3.3 Il trasporto pubblico a Rimini . . . . . . . . . . 48
3.3.4 Aspetti dinamici: i campi di attrazione . . . . . 50
3.3.5 I cronotopi e l’individuo . . . . . . . . . . . . . 52
3.4 Parametri generici della simulazione . . . . . . . . . . . 54
3.5 Risultati di varie simulazioni . . . . . . . . . . . . . . . 57
3.5.1 Commenti . . . . . . . . . . . . . . . . . . . . . 58
3.6 Aspetti informatici . . . . . . . . . . . . . . . . . . . . 74
Bibliografia 79
4

Introduzione
L’emergere di un comportamento complesso in un sistema consi-
stente di elementi semplici in interazione si pone come uno dei fenomeni
piu affascinanti del nostro mondo. Se ne possono trovare esempi in
quasi tutti i campi di interesse scientifico moderni, riguardanti, per
citarne alcuni, la formazione di ”strutture coerenti” in sistemi chimico-
fisici, il moto di animali in biologia e il comportamento di gruppi so-
ciali. Si e di solito convinti che l’evoluzione dei sistemi sociali sia
determinata da numerosi fattori, difficili da individuare, di tipo cul-
turale, sociologico, economico, politico, ecologico, ecc. Tuttavia, negli
scorsi anni, lo sviluppo di un campo interdisciplinare quale la scienza
della complessita ha portato all’intuizione che i processi di dinamica
complessa possono anche essere generati da semplici interazioni [1].
Si e notato in particolar modo l’emergere di fenomeni collettivi
da interazioni individuali o microscopiche in differenti campi di ap-
plicazione, quali la biologia, le scienze sociali, l’economia, la fisica, la
chimica.
Affinche sia chiara la relazione tra l’auto-organizzazione e la tran-
sizione dalle dinamiche individuali a quelle collettive, puo venire in aiu-
to la definizione data da Biebricher-Nicolis-Schuster: ”self-organization
e il processo dal quale le sottounita individuali realizzano, tramite in-
terazioni cooperative proprie, stati caratterizzati da nuove proprieta
emergenti che trascendono le proprieta delle loro parti costituenti.”
Questa spiegazione, che mette in rilievo gli aspetti dinamici del pro-
cesso, include, come idea generale, anche processi di formazione di
strutture che avvengono tramite un rilassamento a uno stato di equi-
librio (termodinamico). La questione chiave di come le proprieta del
sistema a livello macroscopico dipendano dalle interazioni microscopiche
e uno dei maggiori problemi se si vogliono fare previsioni su un si-
stema complesso, anche perche esso crea la sua complessita nel corso
dell’evoluzione in funzione dei propri limiti.
5

Per intuire il legame funzionale che c’e tra le interazioni micro-
scopiche e l’immagine macroscopica del sistema complesso, e impor-
tante trovare un livello di descrizione che, da una parte, consideri
aspetti specifici del sistema e che, dall’altra, sia adatto a mostrare
l’origine di nuove qualita, ma la cui intelligibilita non sia compro-
messa da un numero troppo elevato di dettagli microscopici. Un
approccio che soddisfa questi criteri e dato dai modelli, basati su
”particelle-individui”, adatti alle simulazioni al computer.
In generale, cambiando le regole di interazione o l’influenza del-
l’ambiente circostante durante la simulazione, si possono osservare dif-
ferenti tipi di dinamiche collettive e l’emergere di nuove proprieta del
sistema non predicibili dalle equazioni di base.
Nei problemi di carattere fisico, i modelli individual-based sono
utili quando le approssimazioni al continuo sono meno appropriate e
si deve passare ad approcci al discreto. Tali approcci per lo studio di
formazioni di strutture vanno dai modelli di gas su reticolo in idrodi-
namica agli automi cellulari stocastici e ai modelli di active walkers o
active Brownian particles [2]-[3].
Sulla scia di queste considerazioni e del clima di interdisciplina-
rieta che caratterizza la ricerca attuale, si propone in questa tesi di
applicare le conoscenze acquisite nella fisica fino ad ora allo studio e
alla modellizzazione della mobilita dei cittadini nelle citta moderne.
Con questo lavoro di modellizzazione pedonale si vuole affrontare il
problema della dinamica urbana nei centri storici di grandi citta, chiusi
al traffico. Tali aree sono riservate al moto pedonale, ciclistico e ad
una rete di trasporto pubblico che collega le varie parti della citta.
Si vuole fornire uno strumento versatile che, oltre a poter simulare la
dinamica esistente sul tessuto cittadino, possa essere utile a prevedere
gli effetti dei progetti di pianificazione urbanistica. Il modello, infatti,
e sensibile alla geometria e alle interazioni proprie della dinamica ur-
bana. L’indagine urbanistica si propone di rispondere a domande del
tipo: se si introduce nella citta un’area commerciale o un mercato, se
si trasforma una vecchia zona riqualificandola a parco, a biblioteca, a
6

zona universitaria, quali saranno gli effetti sulla mobilita e sull’utiliz-
zo dei mezzi pubblici? Per rispondere a tali quesiti e indispensabile
studiare le forze sociali che inducono il cittadino al moto, il suo com-
portamento nello spazio urbano anche in situazioni critiche di affolla-
menti e gli strumenti per favorirne la mobilita. Queste problematiche
hanno suggerito la concezione di un modello pedonale che sintetizzi
in se gli aspetti della societa moderna e che riproduca i fenomeni di
formazione di strutture, tipici dei sistemi complessi.
Gli affollamenti pedonali sono stati studiati empiricamente per piu
di quattro decadi (Hankin e Wright, 1958; Oeding, 1963; Hoel, 1968;
Older, 1968; Navin e Wheeler, 1969; Carstens e Ring, 1970; O’Fla-
herty e Parkinson, 1972; Weidmann, 1993). A partire dalle indagini
comportamentali (Hill, 1984; Batty, 1997), e stato proposto un eleva-
to numero di modelli di simulazione, come i modelli di accodamento
(Yuhaski e Macgregor Smith, 1989; Roy, 1992; Løvas, 1994; Hamacher
e Tjandra, 2001), modelli a matrici di transizione (Garbrecht, 1973) e
modelli stocastici (Mayne, 1954; Ashford e al., 1976), che sono parzial-
mente legati fra loro. In piu, ci sono modelli che regolano il compor-
tamento dei pedoni nella scelta delle strade (Borgers e Timmermans e
al., 1992; Hoogendoorn e al., 2001). Nessuno di questi concetti prende
adeguatamente in conto gli effetti di self-organization che avvengono
all’interno di agglomerati di pedoni. Altri modelli sono impiantati su
tecniche di simulazione tipo CA (cellular automata) o ABM (agent-
based model) o AIBM (artificial-intelligence-based model). Nonostante
l’apparente caoticita del moto pedonale, tutti hanno cercato, tramite
osservazioni e studi sui pedoni, di definire delle regole comportamen-
tali generali (Helbing, 1997-1998, Helbing, Molnar, e al., 2001, Ganem,
1998, Helbing, Schweitzer, e al., 1997, Weidmann, 1993).
Il nome ”cronotopo”, coniato dai ricercatori del Dipartimento di
Scienze del Territorio del Politecnico di Milano e del Dipartimento di
Fisica dell’Universita di Bologna, denota un’area dello spazio urbano
che determina la richiesta di mobilita, sia spaziale con un’attrazione
nei confronti di determinate classi di cittadini, sia temporale essendo
7

quest’attrazione attivata in base ad una calendarizzazione, cioe una
scansione nel tempo delle attivita cronotopiche [31]. Inoltre un crono-
topo puo essere composto da piu centri di attrazione interni, detti
topoi, che, in questo caso, diventano i principali attrattori del pedone
che ha in programma di visitare quell’agglomerato di attivita. I centri
di maggiore importanza e forza di attrazione sono le sedi universitarie,
gli ospedali, le sedi comunali, le aree commerciali, ecc., nei quali stu-
denti, lavoratori, commercianti, uomini d’affari, casalinghe o semplici
utenti della citta svolgono le loro attivita giornaliere.
Il modello cronotopico per lo studio della mobilita pedonale nei
centri urbani moderni si propone di ricreare le dinamiche provocate
dall’attrazione esistente tra particolari luoghi della citta e le cate-
gorie di individui ad essi propensi contemplando molti degli aspetti
comportamentali dell’individuo quando si sposta nella citta.
Il modello tiene conto della possibilita per i cittadini di utilizzare
mezzi pubblici e biciclette e della loro suddivisione in categorie in base
alle quali vengono attratti dai vari cronotopi.
L’originalita del modello consiste nell’aver individuato la relazione
tra i cronotopi e gli individui secondo la definizione di alcune categorie
sociali, quali l’eta, il sesso, l’attivita d’impiego, i passatempi, ecc... Si
analizza, pertanto, una vasta rosa di cause - non esclusivamente con-
nesse a ragioni di lavoro - del movimento dei cittadini, a differenza di
molti approcci finora utilizzati (modelli origine-destinazione). Un’al-
tra fondamentale caratteristica del modello e l’assenza o la scarsa pre-
senza nel centri storici di mezzi privati che, pertanto, non interagiscono
con le altre mobilita nel territorio urbano. Il modello tiene conto sia
di una componente stocastica la cui presenza e stata evidenziata da
recenti studi urbanistici (mobilita zig-zagante) sia di forze sociali che
attraggono il cittadino verso aree geografiche dove si svolgono parti-
colari attivita. La scelta delle strade ad ogni incrocio e influenzata da
probabilita condizionali che dipendono dalle componenti della forza di
drift, dalla psicologia del pedone, dall’affollamento locale, dall’estetica,
dalla gradevolezza delle strade e dalla memoria del percorso preceden-
8

temente fatto. Il pedone presenta comportamenti di imitazione o di
repulsione ai comportamenti altrui, se non e necessitato a raggiungere
una particolare meta; in quest’ultimo caso mette in secondo piano tali
comportamenti e segue la sua attrazione verso il cronotopo. Per far
questo valuta la convenienza di prendere un autobus o di proseguire
a piedi recandosi alla piu vicina fermata in cui transita una linea di
autobus a seconda della distanza che ha con questa e con il cronotopo.
Parte dei cittadini avra un moto erratico e un’altra un’agenda di lu-
oghi da raggiungere che il singolo pedone gestisce in modo intelligente
in base al loro orario di apertura.
Questo modello e stato implementato in un programma di simu-
lazione interfacciato graficamente con l’utente che permette sia di os-
servare istante per istante l’evoluzione dello stato del sistema sia di stu-
diarne situazioni di non equilibrio e l’emergere di nuove caratteristiche
nella dinamica.
Sono state fatte simulazioni su una citta virtuale dalle semplici
caratteristiche topologiche per poter interpretare i dati ricavati con
metodi matematici e statistici studiando sia comportamenti di campo
medio - quando non ci sono destinazioni particolari attribuite agli
individui - sia situazioni di non equilibrio in cui i campi attrattivi dei
cronotopi dipendono dal tempo.
Successivamente all’indagine e all’analisi teorica che il modello ha
richiesto, si discutono, in questo lavoro di tesi, i risultati ottenuti dalle
simulazioni sul centro storico di Rimini.
La sperimentazione del modello ha richiesto notevoli energie fi-
nalizzate al confronto con una situazione reale. Di grande importanza
e stato avere a disposizione i dati riguardanti il caso specifico perche le
osservazioni sul modello fossero ben formulate alla luce dei risulatati
delle prove. L’area del centro storico di Rimini fornisce, innanzitutto,
i requisiti di applicabilita del modello: scarsissimo traffico veicolare,
numerosi centri di attrazione per il cittadino e un traffico pubblico che
serve la citta creando collegamenti anche con l’esterno. Le dinamiche
insite in tale spazio urbano sono particolarmente interessanti per la
9

presenza della stazione ferroviaria, del fiume Marecchia attraversato
da due ponti, della circonvallazione e di principali assi di viabilita che
lo mettono in comunicazione con la periferia e i paesi limitrofi. Si e
riprodotto fedelmente il transito di autobus di linee urbane ed extrau-
rbane, il flusso di pedoni uscenti dalle aree di parcheggio e la classifi-
cazione sociale degli abitanti e dei forestieri visitatori e lavoratori che
frequentano il centro. Sono state individuate le aree cronotopiche tra
i luoghi di maggiore affluenza tra cui le sedi universitarie, i mercati,
la stazione FS, la piazza principale (piazza Tre Martiri), le strutture
ospedaliere, i centri ricreativi e le sedi postali della citta. La presenza
di parcheggi ha suggerito un ulteriore elemento del modello: i pedoni
provenienti da questi sentono principalmente l’esigenza di raggiun-
gere cronotopi vicini, simulando il fatto che la scelta del parcheggio e
strategica a tale scopo.
I dati relativi alla classificazione sociale dei cittadini che frequen-
tano la citta e all’individuazione delle aree cronotopiche sono stati
ottenuti tramite contatti con l’amministrazione pubblica e con il
presidente dell’associazione architetti di Rimini, dottore Marco Zaoli.
La sperimentazione su Rimini si e sviluppata, in primo luogo, at-
traverso la calibrazione dei parametri del modello e, in secondo, pro-
ducendo simulazioni e osservazioni sui risultati. Le simulazioni han-
no dato risultati di notevole importanza in quanto hanno mostrato
a pieno gli effetti di formazione di strutture che interessano le aree
cronotopiche, in cui si sono manifestati fenomeni di affollamento, la
distribuzione della popolazione nella citta mettendo in risalto le strade
piu percorse a Rimini con ottimo riscontro con l’esperienza dei fatti,
la distribuzione della richiesta dei mezzi pubblici alle fermate.
10

Capitolo 1
Stato dell’arte
Dagli anni sessanta si presento il problema di costruire modelli matem-
atici orientati alla fisica, utili per lo studio di dinamiche di citta
in crescita, di trasformazioni sociali e della mobilita dei cittadini.
Piu precisamente, tali modelli sono stati sviluppati per spiegare la
struttura globale delle citta in maniera razionale e per prevedere le
conseguenze della pianificazione urbana. In questo capitolo saranno
descritti alcuni modelli che hanno posto le basi fenomenologiche e
analitiche per lo studio moderno della dinamica dei pedoni.
1.1 Primi studi sul comportamento dei
pedoni
Nonostante l’apparente caoticita del moto pedonale, tutti hanno cer-
cato, tramite osservazioni e studi sui pedoni, di definire delle regole
generali di comportamento [28]:
1. I pedoni sentono una forte avversione a prendere deviazioni o
a muoversi contro la loro direzione di viaggio desiderata, anche
se la via diretta e affollata. Tuttavia, ci sono osservazioni che
provano che i pedoni normalmente scelgono la strada piu veloce
per la loro prossima destinazione e non la piu corta (Ganem,
1998). In generale, i pedoni prendono in conto deviazioni se, cosı
facendo, aumentano il comfort di camminare oppure riducono lo
11

sforzo per raggiungere la loro destinazione (Helbing, Keltsch, e
Molnar, 1997; Helbing, Schweitzer, e al., 1997).
2. I pedoni preferiscono camminare con una velocita propria con-
geniale, confortevole, sostenuta col minimo dispendio di energia
(Weidmann, 1993), se non condizionati ad andare piu veloce-
mente per raggiungere la destinazione in tempo. Le velocita
desiderate dentro folle di pedoni sono distribuite gaussianamente
(Henderson, 1971). Tuttavia, la velocita media dipende dalla
situazione (Predtetschenski e Milinski, 1971), dal sesso, dall’eta,
dall’ora del giorno, dallo scopo del viaggio, dai dintorni, ecc.
(Weidmann, 1993).
3. I pedoni prendono una certa distanza dagli altri pedoni e dai
bordi (di strade, muri e ostacoli; Trasportation Research Board,
1985; Brilon e al., 1993). La densita dei pedoni cresce (la dis-
tanza interpersonale diminuisce) attorno a particolari aree di
attrazione. Gli individui che conoscono gli altri possono formare
dei gruppi che sono entita che si comportano come i singoli pe-
doni. La grandezza di tali gruppi seguirebbe la distribuzione
di Poisson (Coleman e James, 1961; Coleman, 1964; Goodman,
1964).
4. Le persone tendono ad avere comportamenti di imitazione, a
seguire la massa (Quarantelli, 1957; Keating, 1982). Come con-
seguenza, le alternative sono spesso dimenticate e poco sfruttate.
5. In situazioni di media-alta densita, il moto di folle di persone
mostra qualche analogia con il moto dei gas, fluidi, e flussi gran-
ulari: attriti viscosi al confine tra due folle che si muovono in
direzioni opposte, organizzazione spontanea in linee di direzione
di passeggio uniforme, gradienti di velocita come sono presenti
nei letti dei fiumi, ecc.
12

1.2 Modello a forze sociali
1.2.1 Le sue origini
Nel 1970 Henderson intuı che gli affollamenti pedonali si comportano
come gas o fluidi e pertanto comparo misure di flussi di pedoni con
le equazioni di Navier-Stokes ottenendo successi considerevoli. Tut-
tavia una teoria realistica gas-cinetica o fluidodinamica per i pedoni
doveva contenere delle correzioni dovute alle loro interazioni parti-
colari (proibizioni, manovre di decelerazione) che, come si puo ben
capire, non conservano il momento e l’energia. Si sono, quindi, svilup-
pate ricerche incentrate su microsimulazioni di moti in situazioni di
densita pedonali elevate.
L’approccio fluidodinamico fenomenologico di Henderson e stato
notevolmente migliorato e inquadrato matematicamente da Dirk Hel-
bing nel 1990 sulla base di un modello pedonale gas-cinetico specifico
(Boltzmann-like) [27]. Insieme ad Helbing hanno poi collaborato molti
altri scienziati tra cui Molnar e Vicsek che compaiono in diversi ar-
ticoli sul tema. Seguendo l’intuizione che il comportamento umano
e “caotico” o almeno molto irregolare e non predicibile, possono es-
sere sviluppati modelli stocastici se ci si restringe ad una descrizione
di probabilita comportamentali all’interno di una intera popolazione
di individui (gas-kinetic pedestrian model). Secondo un approccio sui
cambiamenti comportamentali suggerito da Lewin, si e costruito un
modello guidato dalle cosiddette forze sociali o campi sociali. Parti-
colari vantaggi di questo approccio sono la considerazione di effetti di
”volume escluso”, dovuti alla struttura granulare, e l’uso flessibile dello
spazio da parte dei pedoni, che richiede un trattamento quasi-continuo
dello spazio in cui avviene il moto. Tutte queste considerazioni e le re-
gole del comportamento del pedone compaiono nell’equazione del moto
che caratterizza tale modello. In accordo con queste equazioni le vari-
azioni temporali d~wα
dtdella velocita preferita ~wα(t) di un pedone α sono
descritte da una quantita vettoriale ~fα(t) che puo essere interpretata
come forza sociale. Questa evoca gli effetti fisici di accelerazione o
13

decelerazione visti come reazione dovuta alle informazioni che gli indi-
vidui hanno su cio che li circonda. In altre parole, le forze sociali sono
differenti dalle forze in fisica, in quanto il loro effetto primario non e
il trasferimento di momento, ma lo scambio di informazioni tramite
processi, oltre che fisici, mentali e psicologici.
1.2.2 La sua formulazione matematica
Come gia accennato, Helbing ha voluto approfondire un aspetto mi-
croscopico del moto pedonale in un modello in cui compaiono inter-
azioni tra pedoni, interazioni tra pedone e le costruzioni delimitanti
la strada, interazioni occasionali tra pedone e gruppi di pedoni, ecc...
Notando che l’esigenza di un pedone e di solito quella di raggiungere
determinate aree, ha cosı evidenziato cause-effetti che ne determinano
il moto come segue.
(i) Il pedone α, la cui posizione attuale e rappresentata dal vet-
tore ~rα(t) al tempo t , segue una strada rappresentata da un poligono
di vertici ~r 1α, ...., ~r n
α. Se il moto del pedone non e disturbato, costui
camminera nella direzione desiderata ~eα(t) con una velocita desiderata
v0α. Una deviazione della velocita attuale ~vα(t) dalla velocita desiderata
~v 0α(t) := v0
α ~eα(t), dovuta a decelerazioni o a impedimenti nel cammi-
no, genera una tendenza a ristabilire una velocita quanto piu prossima
a quella desiderata in un tempo indicativo τα detto tempo di rilassa-
mento. Questo puo essere descritto da un termine di accelerazione
della forma
~F 0α(~vα, v0
α ~eα) :=1
τα
(v0α ~eα − ~vα). (1.1)
(ii) Il moto di un pedone α e influenzato da altri pedoni. In particolare,
egli tiene una certa distanza da altri pedoni che dipende dalla densita
locale delle persone che gli sono vicine e dalla velocita desiderata v0α.
Un pedone normalmente sente crescere il disagio provocato dalla vic-
inanza eccessiva di una persona estranea e puo reagire anche in modo
aggressivo. Questo risulta dagli effetti repulsivi in altri pedoni β che
14

possono essere rappresentati dalle quantita vettoriali
~f socαβ (~rαβ(t)) := Aα exp[(rαβ − dαβ)/Bα] nαβ
×(
λα + (1 − λα)1+cos(ϕαβ)
2
)
. (1.2)
dove Aα denota la forza dell’interazione e Bα il range dell’inter-
azione repulsiva; dαβ(t) = ||~rα(t) − ~rβ(t)|| e la distanza tra i centri
di massa dei pedoni α e β, rαβ la somma dei loro raggi, e nαβ il
vettore normalizzato che punta da β ad α, ed infine, con la scelta
λα < 1 si tiene conto del carattere anisotropo delle interazioni pe-
donali, come il maggiore impatto che puo avvenire se i due pedoni si
muovono frontalmente rispetto ad un contatto laterale. Il parametro
ϕαβ(t) denota l’angolo tra la direzione del moto e la direzione del-
l’oggetto che esercita la forza repulsiva, dove ϕαβ(t) si ricava dalla
relazione cos ϕαβ(t) = − nαβ(t) · ~eα(t).
Nonostante la semplicita di questo approccio, esso descrive abbas-
tanza realisticamente gli spostamenti dei pedoni per evitarne altri.
(iii) L’interazione fisica ~f phαβ gioca un ruolo solo quando i pedoni
hanno un contatto fisico con gli altri, cioe se rαβ ≥ dαβ. In questo caso
si introducono due forze ispirate dalle interazioni granulari (Ristow
e Herrmann, 1994; Wolf e Grassgerger, 1997); la prima riguarda la
compressione del corpo e la seconda rappresenta un attrito radente
che ostacola il moto tangenziale relativo:
~f phαβ(t) = kΘ(rαβ − dαβ) nαβ + κΘ(rαβ − dαβ)∆vt
βα tαβ, (1.3)
dove la funzione Θ(z) e uguale al suo argomento z, se z ≥ 0,
altrimenti 0. Inoltre tαβ e la direzione tangente e ∆vtβα = (~vβ−~vα) · tαβ
e la differenza delle velocita tangenziali, mentre k e κ sono costanti.
(iv) Il pedone prende una certa distanza dai bordi delle costruzioni,
muri, strade, ostacoli, per evitare di farsi male o correre dei rischi.
Percio un ”bordo” evoca un effetto repulsivo che puo essere aggiunto
a quello menzionato in precedenza, descritto da
~f phαb := {Aα exp[(rα − dαb)/Bα] + kΘ(rα − dαb)} nαb
− κΘ(rα − dαb)(~vα · tαb)tαb. (1.4)
15

dove rα e il raggio del pedone α e b indica l’ostacolo da evitare.
(v) I pedoni sono spesso attratti da altre persone (amici, artisti di
strada, ecc.) o oggetti. Questi effetti attrattivi ~fαi verso i luoghi ~ri sono
stati modellati da potenziali attrattivi e monotonicamente crescenti,
similmente agli effetti repulsivi, ma il corrispondente range d’inter-
azione Bαi e di solito piu grande e il parametro d’intensita Aαi(t) e
tipicamente piu piccolo, negativo e decrescente col tempo come l’in-
teresse che muove il pedone. Inoltre i comportamenti di aggregazione
tipici di famiglie, amici o gruppi di turisti possono essere rappresen-
tati con forze del tipo ~fattαβ (t) = −Cαβnαβ(t). Gli effetti attrattivi
sono per esempio responsabili della formazione di gruppi di pedoni
(paragonabili alle molecole).
Poiche tutti gli effetti menzionati precedentemente influenzano le
decisioni del pedone simultaneamente, si assume che il loro effetto
totale sia dato dalla somma di tutti gli effetti, come nel caso di forze.
Allora possiamo definire il modello a forze sociali come segue:
d~wα
dt:= ~fαβ(t) = ~F 0
α(~vα, v0α ~eα) + ~f soc
αβ (t) + ~f phαβ(t) + ~f ph
αb + ~ξα(t) (1.5)
dove in ~fαβ(t) sono riassunti i contributi socio-psicologici e le inter-
azioni fisiche. Qui e stato introdotto un termine di fluttuazioni che
tiene in conto delle variazioni casuali del comportamento o delle devi-
azioni dalle leggi comportamentali assunte. Helbing, infine, mette in
relazione la velocita attuale ~vα(t) e quella preferita ~wα(t) tenendo in
conto che la velocita pedonale e superiormente limitata da vmaxα detta
velocita massima accettabile cosicche il moto realizzato e dato da
d~rα
dt= ~vα(t) := ~wα(t) g
(
~v maxα
||~wα||
)
(1.6)
con
g
(
~v maxα
||~wα||
)
:=
{
1 se ||~wα|| ≤ ~v maxα
~v maxα /||~wα|| altrimenti.
(1.7)
1.2.3 Simulazioni
Le simulazioni su questo modello, per quanto semplice, hanno osser-
vato e riprodotto verosimilmente fenomeni reali, in particolar modo
16

mostrando fenomeni collettivi di self-organization in situazioni in cui
una strada e percorsa da flussi opposti oppure nel passaggio attraverso
strettorie di due folle di persone poste dall’una e dall’altra parte. Le as-
sunzioni, oltre che sulla espressione analitica dei potenziali, sono state
fatte sulla distribuzione delle velocita desiderate v0 : esse sono dis-
tribuite gaussianamente con media <v0> = 1.34 ms−1 con deviazione
standard√
θ = 0.26 ms−1. Le velocita sono limitate da vmaxα = 1.3 v0
α.
Non voglio dilungarmi troppo sull’esperienza delle simulazioni poiche
mi interessava principalmente mostrare le idee chiave del modello che,
pur essendo tutt’oggi valide ed interessanti, hanno pero trovato posto
in applicazioni di carattere microscopico. Per tale motivo le simu-
lazioni fatte da Helbing non possono rappresentare un precedente per
il modello di cui mi sono occupato che, invece, trova applicazione in
situazioni macroscopiche.
1.3 Modello origine-destinazione
I modelli classici per lo studio della mobilita e del traffico nelle citta
sono stati basati sul concetto di origine-destinazione [32][?]. Tali mod-
elli sono stati applicati all’analisi del traffico veicolare durante le ore
di entrata-uscita dai luoghi di lavoro. I cittadini sono divisi in di-
verse categorie a seconda delle mete da raggiungere, sedi di lavoro e
dei punti di partenza e si muovono tutti con mezzi dalle caratteris-
tiche identiche. Ogni strada e caratterizzata da una ”portata” massi-
ma predefinita che influenza la velocita di percorrenza secondo leggi
prestabilite. Il moto dei cittadini nella rete stradale e simile a quel-
lo di un fluido incomprimibile: in presenza di incroci si introducono
matrici di transizione che distribuiscono la densita sulle varie possi-
bili scelte in analogia a quanto avviene nei processi di Markov. Gli
elementi di tali matrici sono calcolati sulla base di considerazioni di
convenienza di vari percorsi rispetto alle destinazioni e di affluenza
verso quest’ultime. Lo scopo dei modelli origine-destinazione e quello
di caratterizzare le situazioni di equilibrio del sistema durante le ore
17
di massimo traffico per determinare la capacita della rete stradale e
determinarne i punti critici.
La difficolta nell’utilizzo di tali modelli e nell’esistenza di molte
configurazioni di equilibrio verso cui il sistema rilassa in base alle con-
dizioni iniziali. Tuttavia solo poche di queste configurazioni sono fisi-
camente accettabili ed e necessario introdurre dei ”bias” nel sistema
come l’imposizione di flussi predeterminati in alcune strade per evitare
il problema della degenerazione degli equilibri.
Inoltre, in base ai recenti approcci urbanistici al problema della
mobilita, risulta necessario sia studiare configurazioni di non equilib-
rio che introdurre esplicitamente componenti stocastiche ”erratiche”
nel moto del singolo cittadino. Questo ha portato allo sviluppo di
modelli cinetici in cui i cittadini possono avere un compotamento ”in-
telligente” sia interagendo con l’ambiente urbano mediante scambi di
informazione sia potendo utilizzare diversi mezzi di trasporto.
1.4 Modello di Luding
Il modello di Luding si aggiunge alla lunga lista di studi teorici, nu-
merici, sperimentali che si prefiggono lo scopo di comprendere il com-
portamento complesso ed affascinante dei fluidi granulari. Luding, in-
fatti, prende in esame la dinamica di un sistema di particelle sferiche,
dure, vincolate ad un moto su un quadrato periodico su due dimen-
sioni, assumendo che le velocita e le posizioni delle particelle che si ur-
tano siano scorrelate (ipotesi di caos molecolare). Nei mezzi granulari,
le correlazioni tra le particelle che collidono possono essere significativi
e, pertanto, si richiede la validazione dell’assunzione di caos moleco-
lare, provata tramite simulazioni guidate da eventi (ED). Questa as-
sunzione e un ingrediente basilare di tutti gli approcci teorici basati
sulla teoria cinetica o sul formalismo operatoriale pseudo-Liouville.
Per il fatto che il moto avviene su un quadrato di lato L, periodico,
non ci sono da introdurre interazioni di bordo. Dentro tale sistema
18

vengono poste N particelle di diametro 2a e massa m occupando cosı
una frazione del volume totale pari a ν = Nπa2/L2.
Nel metodo guidato da eventi (ED) le particelle seguono traiettorie
rettilinee fino a quando non urtano con un’altra particella, cosa che
avviene in un tempo nullo. Viene introdotta la dissipazione di contatto
nella direzione normale al moto tramite un parametro r (compeso tra
0 e 1). I casi limite r = 1 o r = 0 rappresentano rispettivamente il
caso totalmente elastico e quello totalmente inelastico. Dopo l’urto la
velocita della particella e
~v1,2′ = ~v1,2±
1 + r
2[(~v2−~v1) · n] n , con n = (~r2−~r1)/|~r2−~r1| (1.8)
In tale equazione, n e il vettore unitario che unisce i due centri e
~vi e la velocita della particella che si trova nella posizione ~ri. Poiche le
particelle dissipano energia ad ogni urto e non ci sono fonti di energia,
essa decresce inevitabilmente col tempo.
Nei sistemi elastici, il parametro d’impatto e uniformemente dis-
tribuito o, in altre parole, l’assunzione di caos molecolare e valida
indipendentemente dalla densita; solo quando il coefficiente e abbas-
tanza piccolo (cioe la dissipazione e abbastanza grande) si osservano
notevoli deviazioni nella distribuzione del parametro d’impatto (le
collisioni centrali diventano meno probabili).
In uno stato di raffreddamento omogeneo Luding si aspetta che
l’energia cinetica normalizzata K(t) = E(t)/E(0) decada col tempo
con la forma funzionale seguente
K(t) =
(
1 +1 − r2
4τ
)
−2
, con τ = 4aNV
√
πE(0)
Mg2a(ν)t , (1.9)
con il tempo adimensionato τ = t−1E t riscalato con la frequenza
d’urto di Enskog al tempo t = 0, con il volume di sistema V , la massa
totale M = N m e la funzione di correlazione particella-particella al
contatto g2a(ν) = (1 − 7ν/16)/(1 − ν)2.
19

Il decadimento dell’energia, con l’artificio del tempo riscalato, dipende
solo da r, e tutte le dipendenze da quantita come la grandezza del sis-
tema, l’energia cinetica e la densita sono contemplate nel parametro
τ . Le simulazioni mostrano un perfetto accordo tra il valore teori-
co dell’energia cinetica K(t) per il raffreddamento omogeneo e quello
della simulazione, ma per τ crescenti ci sono deviazioni che tengono il
valore dell’energia superiore a quello aspettato.
Dall’osservazione dello spazio configurazionale delle particelle si no-
tano alcune situazioni di grandi agglomerati e/o particolari strutture
spaziali, cioe disomogeneita della densita dovute alla dissipazione.
In conclusione, si puo affermare che l’assuzione di caos molecolare
e rispettata per densita arbitrarie e dissipazioni abbastanza piccole.
1.5 Oltre al pedone: la citta
Dopo aver visto le relazioni che intercorrono tra pedoni, non e su-
perfluo domandarsi se i pedoni si muovono in una citta indipendente-
mente dalla sua struttura geometrica o dalla disposizione dei centri di
servizio pubblico. Tale questione sta tuttora riscaldando gli animi nel
campo delle scienze sociali e urbanistiche che cercano di individuare
le regole, le motivazioni e le esigenze che accompagnano il moto dei
pedoni all’interno di aree urbane o di citta intere.
1.5.1 La citta come oggetto
La teoria della citta come oggetto e stata formulata da Bill Hillier
[29]. Insieme ai suoi collaboratori, lavora su tale concetto da almeno
un decennio. Nel 1993, in ”Natural movement” ha mostrato che la
struttura del reticolo urbano ha effetti indipendenti e sistematici sul-
l’insieme dei movimenti. Successivamente ha definito il reticolo urbano
come sistema si ineguaglianze configurazionali che genera un sistema
di ineguaglianze attrazionali, stabilendo il concetto, troppo lapidario
per i non addetti, secondo cui la configurazione genera l’attrazione.
Si pone cosı il problema di come rilevare e di come classificare le di-
20

namiche sotterranee che soggiacciono al legame teorizzato da Hillier
tra spazio e funzionalita. Egli innanzitutto osserva la manifestazione
di tale legame, e cioe il movimento, la cui entita puo essere sia provo-
cata dallo spazio, sia dallo stimolo per un cambiamento e/o per una
espansione di questo. Infatti Hillier parla di meccanismo space-to-
function guidato dall’effetto della configurazione spaziale sul movi-
mento e di meccanismo function-to-space che, azionato dalle esigenze
insite nel movimento, ”crea” lo spazio. La presenza di un nuovo ele-
mento funzionale nel tessuto urbano, di un nuovo centro di attrazione,
provoca conseguenze nel comportamento umano: Hillier parla di leggi
spaziali. Tale concetto e fondamentale: esso non si riferisce al com-
portamento umano universale (per esempio alla teoria della ”territo-
rialita umana”), ma ad una legge di causa-effetto per cui se introduco
un oggetto in un sistema spaziale, allora si hanno conseguenze predi-
cibili per la configurazione spaziale dell’ambiente. Tali effetti sono
totalmente indipendenti dalla volonta o dalle intenzioni umane, ma
possono essere usati dagli esseri umani per realizzare effetti sociali.
Le persone sono limitate da queste leggi nel senso che esse formano
un sistema di possibilita e limiti dentro cui evolvere le proprie strate-
gie spaziali. Un esempio piu che rappresentativo (lo stesso Hillier, in
”Space is the Machine”, parla di principio di centralita) viene dato
dal porre un oggetto nel centro di uno spazio; in questo modo creiamo
maggiore ostruzione alla vista e movimento potenziale che se lo mettes-
simo in periferia. Inoltre, sempre restando sull’esempio, Hillier parla
di incremento della distanza universale, intesa come la somma delle
distanze da ogni punto a tutti gli altri. Al principio di centralita segue
un corollario: ”ponendo due oggetti a una distanza pari a quella che
hanno con gli altri oggetti, la distanza universale aumenta rispetto al
caso in cui sono posti vicini tra loro e vicini ad altri oggetti, poiche
nel primo caso creo piu linee corte uguali mentre nell’ultimo creo linee
piu lunghe e linee piu corte”.
Si noti che queste considerazioni riguardano in particolar modo la
geometria della citta, infatti per linea si intende sia linea dello sguardo
21

che strada se ve ne fosse una a congiungere i due oggetti.
Oltre ad enunciare la natura delle leggi spaziali, Hillier cerca di ar-
gomentare una sua teoria secondo cui l’impatto delle leggi spaziali sul-
l’ambiente in evoluzione e guidato da due tipi di forze sociali, grossolana-
mente identificate come socio-culturali e micro-economiche, messe in
uno schema di contrapposizione di effetti. Infatti egli afferma che
il principio di centralita riflette in se stesso la dualita fondamentale
dei processi socio-culturali e micro-economici. Le esigenze micro-
economiche porterebbero ad avere uno spazio di insediamento con
linee piu lunghe, quindi con piu integrazione (minimizzando la dis-
tanza universale), piu co-presenza nello spazio di studio; le esigenze
socio-culturali portano alla creazione di grandi aree con restrizioni al-
l’integrazione e alla naturale co-presenza che e solita seguire per mezzo
del movimento.
Forte di queste intuizioni, Hillier promuove una tecnica di analisi
spaziale, detta analisi a mappe assiali, la quale si propone di dare un
peso alla struttura della citta sulla base di tali principi. Studiando la
mappa assiale di molte aree urbane si intravede l’azione separata dei
due tipi di forze sociali.
Tutto questo da una spiegazione e una forma di principio alla re-
lazione tra reticolo urbano e movimento e pone la ricerca in tale cam-
po nella prospettiva di considerare la citta come l’effetto di complesse
relazioni tra i suoi costituenti.
1.5.2 Visibility Graph Analysis: VGA
Uno degli importanti mezzi di cui si e avvalsa la ricerca e la VGA (Vis-
ibility Graph Analysis), una tecnica per la rappresentazione e l’analisi
della struttura spaziale urbana [30]. Tale tecnica e diventata un mezzo
per modellizzare il moto pedonale in quanto permette di quantificare
l’influenza della morfologia urbana su di esso. Tale ramo d’indagine
si pone la seguente questione: la morfologia delle costruzioni stesse
influenza il moto pedonale? Tale questione appartiene all’area delle
scienze sociali che indagano sulle conseguenze che la struttura spaziale
22

ha sulla societa. Si e notato che il modo in cui le persone ”usano”
un’area urbana dipende non da quello che pianificatori o architetti
si sarebbero aspettati ma da potenziali sociali offerti dalla struttura
spaziale. Si procede isolando le regole indipendenti della struttura
spaziale sul funzionamento della societa. A tale scopo si esamina l’-
effetto principale che l’ambiente induce sulle attivita sociali: il moto
pedonale e le sue caratteristiche sistematiche.
Tale ricerca ha messo in evidenza, oltre al suo naturale scopo di di-
mostrare la correlazione tra il moto pedonale e la visibilita, la relazione
di proporzionalita che esiste tra il numero di pedoni in cammino e la
larghezza dei marciapiedi. Tale proporzionalita tiene conto, anche,
della possibile congestione del moto pedonale causata da affollamenti
sui marciapiedi.
La legge di proporzionalita e espressa matematicamente da una
retta di regressione (i marcialiedi piu affollati sono sopra la linea di
regressione mentre quelli meno affollati sotto):
Y = 4.975 + 1.681 X (1.10)
con Y = ln(moto pedonale medio) e X = ln(larghezza del marci-
apiede in metri) e dove i coefficienti numerici sono stati calcolati per
uno studio specifico di un’area di Londra.
La conclusione cui si e arrivati in questo studio specifico e che molta
parte della varianza associata alle fluttuazioni del moto pedonale puo
essere spiegata dalla variazione della capacita dei marciapiedi ma la
visibilita dentro il tracciato urbano rimane il parametro che fornisce
una correlazione maggiore.
23

24

Capitolo 2
Il modello cronotopico
Inizialmente le citta erano considerate come un sistema statico in una
situazione di equilibrio stazionario. Approcci differenti, basati su mod-
elli meccanici (gravitazionali), termodinamici (entropici) o, special-
mente in USA, sulla teoria dei giochi e sulle equazioni tipo Lotka-
Volterra, sono stati proposti per formulare strategie all’interno della
citta o per pianificare il territorio urbano. Successivamente agli svilup-
pi in campo matematico-fisico sulle dinamiche non lineari e sulla di-
namica complessa ed in campo informatico-tecnologico, sono emersi
modelli sia deterministici che stocastici. E sulla base di questi pro-
gressi che gli studiosi hanno potuto guardare con fiducia ai molteplici
aspetti insiti nelle dinamiche urbane (per esempio, chi le genera e quali
sono gli effetti, anche in situazioni critiche) e alla formulazione di mod-
elli adatti a simulazioni sempre piu realistiche. In questo capitolo si
discutono, dopo aver spiegato alcuni concetti base, le linee caratter-
izzanti il modello cronotopico di traffico pedonale, la validazione nel
caso di campo medio e lo stato di implementazione.
2.1 Modello ad agenti
E un modello in cui l’unita base dell’attivita e l’agente. In genere
ci sono piu agenti che interagiscono tra loro. Un agente e l’unita
funzionale identificabile nel codice di programma autonoma e goal-
directed. Autonomo sta a significare che l’agente e capace di azioni
25

indipendenti effettive e goal-directed che sono dirette verso la realiz-
zazione di compiti ben definiti. Gli agenti possono avere piu capacita
oltre a queste due (per esempio, l’intelligenza e l’adattabilita), ma su
questo mi dilunghero nel prossimo capitolo, visto che, a questo stato
dell’arte, il concetto principalmente sviluppato nel modello e quello di
cronotopo.
2.2 Definizione di cronotopo
Il nome ”cronotopo”, dato dai ricercatori del Dip. di Scienze del Ter-
ritorio del Politecnico di Milano, denota un’area dello spazio urbano
che determinerebbe la richiesta di mobilita, sia spaziale con un’at-
trazione verso determinate classi di cittadini, sia temporale essendo
quest’attrazione attivata in base ad una calendarizzazione dello stes-
so, cioe una scansione nel tempo della sua attivita. E proprio in base
al concetto di cronotopo [31] e alla sua capacita di produrre corre-
lazioni nella mobilita di classi di cittadini che si e pensata una strate-
gia di simulazione differente dal modello origine-destinazione. Infatti,
il cittadino-pedone non raggiunge il cronotopo secondo criteri di cam-
mino minimo pressoche deterministico, ma secondo una dinamica con
componente stocastica rilevante e per tale motivo e soggetto a possibili
percorsi di tipo zig-zagante attorno al cronotopo prima di raggiungerlo
e sostarvi. Inoltre un cronotopo puo essere composto da piu centri di
attrazione interni e differenziati, detti topoi, che, in questo caso, diven-
tano i principali attrattori del pedone che ha in programma di visitare
quell’agglomerato di attivita. Infatti i cronotopi sono aree macro-
scopiche del territorio urbano. In esse ci sono generalmente molte
attivita in svolgimento dove possono avvenire relazioni interpersonali.
I centri di maggiore importanza e forza di attrazione sono le sedi uni-
versitarie, gli ospedali, le sedi comunali, le aree commerciali, ecc., nei
quali studenti, lavoratori, commercianti, uomini d’affari, casalinghe o
semplici utenti della citta svolgono le loro attivita giornaliere.
26

2.3 Le idee principali del modello
Ci sono vari aspetti del modello che completano l’idea base di crono-
topo precedentemente esposta. Tali elementi sono parte integrante
del quadro complessivo che e stato dedotto dall’osservazione della
dinamica che si sviluppa negli spazi urbani.
Innanzitutto, il sistema e costituito da molte unita mobili elemen-
tari: i cittadini. Essi appartengono a categorie sociali in accordo con
la loro propensione a svolgere particolari compiti, a raggiungere deter-
minate mete situate nell’ambiente urbano. Tali categorie sono state
definite grazie al dialogo instaurato con i ricercatori del Dipartimen-
to di Sociologia - Universita degli Studi di Milano Bicocca - e ven-
gono utilizzate nel modello per descrivere la tipologia di individui che
partecipano dell’attrazione di aree urbane loro predisposte.
Le unita elementari hanno tra loro interazioni indirette: tali inter-
azioni si presentano nei cronotopi e si manifestano come incremento
dei tempi d’attesa in essi, quando le risorse spaziali sono sature. E in
questo legame tra elementi dell’ambiente urbano ed agenti mobili che
si puo individuare la causa dell’emergenza di fenomeni di affollamento
locali.
A proposito dell’ambiente, quello che viene riproposto dal sim-
ulatore e una riproduzione della rete stradale che schematicamente
definisce lo spazio disponibile al moto. Oltre alla rete stradale viene
riprodotta una rete di trasporto pubblico a servizio del cittadino, sulla
quale si svolge una dinamica deterministica (quella degli autobus). Il
singolo individuo, invece, quando e sulla rete stradale, ha una dinami-
ca stocastica che si sviluppa con un forte carattere di indeterminazione
e impredicibilita.
Il modello prevede per l’individuo proprieta di memoria e di ap-
prendimento, relativamente al moto sul tessuto urbano, per simulare la
conoscenza che potrebbe avere della citta o le informazioni che puo ri-
cavare da questa. In questo modo e con queste interazioni con lo spazio
urbano, il cittadino puo soddisfare le proprie esigenze di mobilita verso
27

aree cronotopiche.
In un quadro prettamente fisico, tale sistema e simile ad un gas
statistico di particelle elementari differenti che non interagiscono tra
di loro e che sono soggette a piu campi attrattivi.
2.4 Un esame piu approfondito:
citta Manhattan-like
Il sistema dinamico di mobilita urbana ha l’aspetto di un sistema
complesso. La sua evoluzione e probabilmente lontana dallo stato di
equilibrio e l’osservazione di leggi macroscopiche che lo riguardano si
basa principalmente su particolari fenomeni di emergenza. Il model-
lo simula la dinamica collettiva di singoli individui che dovrebbero,
in principio, soddisfare un proprio programma di mobilita stabilito,
consistente nel raggiungimento di piu cronotopi e nel trascorrere del
tempo in ognuno di essi. L’attrazione cronotopica e data da una forza
dipendente dalla sua distanza dal pedone. Non piu di una singola forza
cronotopica puo essere considerata ogni intervallo temporale, cosicche
se un individuo sente l’attrazione di piu cronotopi, egli fa una scelta
per definire un ordine temporale delle sue tendenze. L’organizzazione
dello spazio urbano si concretizza in due reti di mobilita sovrapposte:
la prima corrisponde alla mobilita pedonale ed e definita dalla rete
delle strade e la seconda corrisponde alla mobilita tramite mezzi pub-
blici definita dalle rispettive linee di trasporto. Ogni strada e divisa
in nodi equispaziati: la distanza tra un nodo e il suo vicino e ricoper-
ta in un intervallo temporale, nel primo caso, e in un tempo minore,
nel secondo, visto che al trasporto pubblico e associata una velocita 5
volte superiore a quella del pedone. La rete di nodi e nel linguaggio
dei grafi un grafo connesso e simmetrico poiche ogni nodo ha almeno
un collegamento (”arco”) con un altro nodo e simmetrico poiche gli
archi sono percorsi in entrambi i versi. Inoltre, e gerarchico poiche per
andare da un nodo qualsiasi ad un altro nodo qualsiasi c’e un solo arco,
un solo cammino diretto. Le due reti comunicano tramite nodi spe-
28

ciali, le stazioni, dove il cittadino decide se e conveniente prendere un
treno o meno. La dinamica dei mezzi pubblici e puramente determin-
istica ed e fissata. La dinamica pedonale, realizzata fondamentalmente
con mezzi statistici (di tipo markoviano), cioe probabilita condizionali
dipendenti dal luogo e dalla storia passata, tiene in conto l’attrazione
cronotopica delle classi sociali (termine di drift deterministico), una
memoria finita della storia precedente (1 step memory), la geometria
locale (rete di strade) e la valutazione della convenienza di prendere un
autobus. Si puo considerare come una mobilita programmata poiche
diamo ad ogni categoria un programma giornaliero fisso per svolgere
il quale i cittadini costruiscono una strategia: mobilita intelligente.
Ad ogni incrocio-nodo la scelta tra le differenti possibilita e fatta in
maniera probabilistica. Chiamiamo Eı l’evento di scegliere la ı-esima
strada ad un dato incrocio che connette n strade: la probabilita P (Eı)
e data da
P (Eı) =wı pı
∑n
=1 w p
(2.1)
dove la quantita wı misura l’attrattivita dell’ı-esima strada e pı e la
probabilita calcolata dal cittadino in accordo alla sua richiesta di mo-
bilita e alla sua memoria precedente (effetto di memoria). L’attrattiv-
ita della strada e in funzione delle diverse proprieta strutturali come la
larghezza, la locazione dentro l’area pedonale, la presenza di negozi,
centri ricreativi, monumenti storici o musei, ecc... . La probabilita
pı dipende dalle tendenze individuali alla mobilita, dalla conoscenza
dello stato di mobilita urbana e dall’effetto di memoria e potrebbe
essere interpretata come una probabilita di Bayes-De Finetti. Se un
cittadino proviene dalla -esima strada, la probabilita pı e calcolata
secondo la formula
pı =
{
0 se ı = 1
n−1(1 + fı) se ı 6=
(2.2)
dove fı e la proiezione della forza cronotopica sulla direzione della
29

-esima strada. La definizione (2.2) significa che la dinamica pedonale
e un processo stocastico con una forza determinitica di deriva e una
memoria di un singolo intervallo temporale; effetti di affollamento in-
tervengono nella scelta della strada nel parametro wı dell’equazione
2.1. La forza cronotopica e una funzione della distanza dal centro del-
la regione cronotopica (indipendente dalla particolare geometria dello
spazio urbano) e diretta lungo il segmento che unisce il nodo consid-
erato con il centro del cronotopo. Tuttavia la direzione e cambiata
quando la linea interseca ostacoli fisici dello spazio urbano come un
fiume o una ferrovia. In questo caso si testa se e possibile superare
l’ostacolo (usando un ”ponte”, dove presente) e si percorre la stra-
da che permetta cio e che sia piu vicina alla direzione originale. In
prossimita dell’area cronotopica la forza e molto bassa e il moto e quasi
un random walk. Distinguiamo due tipi di cronotopi in base a differen-
ti leggi di attrazione: i cronotopi forti come ospedali, universita, posti
di lavoro, la cui forza attrattiva e
~f = c1rcec (2.3)
e cronotopi deboli come negozi e centri culturali, la cui forza attrattiva
e
~f =
{
c2rcec se rc ≤ Rc2R2/rcec se rc > R.
(2.4)
Nelle eq. (2.4) e (2.4) rcec e il vettore dalla posizione del cittadi-
no al centro del cronotopo, R e una distanza fissa e cı sono costan-
ti di normalizzazioneche che definiscono il rapporto delle varie forze
cronotopiche.
I cittadini che hanno una tendenza verso un cronotopo possono
decidere se prendere un autobus con una probabilita pt proporzionale
alla distanza rc in accordo con
pt =
{
rc/r0 se rc ≤ r0
1 altrimenti(2.5)
30

dove r0 rappresenta la massima distanza di cammino ricoperta da
un cittadino di una certa classe. Quando il cittadino raggiunge una
stazione si mette in attesa finche non giunge un treno la cui direzione
riduce la distanza rc dal cronotopo. In questo caso il cittadino diven-
ta un utente e rimane sul treno fintanto che questo non raggiunge la
stazione che dista meno dal cronotopo. A questo punto egli decide se
cambiare treno se c’e una linea che gli permette di avvicinarsi ulterior-
mente, altrimenti abbandona la stazione. I treni hanno una capacita di
trasporto finita cosicche il tempo di attesa dipende sia dalla frequenza
dei treni che dal numero degli utenti. E da notare che i cittadini non
hanno un’infomazione globale sulla rete di trasporto per cui non c’e
ottimizzazione nella scelta dei treni.
2.4.1 Simulazioni di mobilita urbana
e teoria di campo medio
Per semplicita abbiamo scelto una geometria triviale per lo spazio
urbano (una citta tipo Manhattan) dove i nodi della rete di mobilita
pedonale sono uniformemente distribuiti nello spazio e corrispondono
agli incroci ortogonali. Lo spazio e omogeneo: con cio si intende che
le strade sono tutte uguali (wı = 1, cfr eq. (2.2)) e ogni nodo ha
n = 4 possibili direzioni ortogonali. Ai confini si trovano condizioni
assorbenti per i cittadini ma il numero totale e costante: ogni volta
che un cittadino e assorbito, un altro viene creato ad un nodo scelto
a caso tra tutti quelli costituenti la rete viaria (escluse le stazioni).
I mezzi pubblici si muovono ad una velocita costante lungo le linee
verticali ed orizzontali e le stazioni sono uniformemente distribuite
nella citta ogni 5 incroci cosicche il rapporto tra la velocita dei treni
e quella dei cittadini e 5. Le stazioni capolinea sono ai bordi della
citta e corrispondono a condizioni di confine riflettenti per la dinamica
dei treni. Questi ultimi sono casualmente distribuiti lungo ogni linea
con una frequenza costante. La scelta di una geometria triviale per
la simulazione, forzata dalla scarsita di dati reali su cui lavorare, ha
31

permesso di testare il modello usando un approccio statistico (teoria
di campo medio). Tale approccio analitico e basato su equazioni di
grandezze medie per descrivere la dinamica delle variabili globali U(t),
W(t) e P(t), che descrivono rispettivamente la frequenza relativa di
utenti, persone in attesa e pedoni. Si e scelta una griglia ortogonale
di Nn = 101 × 101 nodi e Ns = 21 × 21 stazioni uniformemente
distribuite nello spazio. La rete di mezzi pubblici contiene 2Ns linee
e i treni, in numero pari a Nt, sono distribuiti su tali linee. Il numero
delle stazioni capolinea e Nhs = 84. Il rapporto tra la velocita dei
treni e quella dei pedoni e vup = 5. Il numero di cittadini usati nella
simulazione e 100,000.
In primo luogo, si e considerato il caso senza attrazioni crono-
topiche; in questo modo e possibile considerare lo spazio omogeneo.
L’andamento delle variabili globali U(t), W(t) e P(t) soddisfa equazioni
di campo medio
P (t + 1) = P (t) − (Ppu + Ppw)P (t) + PupU(t) + PwpW (t)
U(t + 1) = U(t) − (Pup + Puw)U(t) + PpuP (t) + PwuW (t)
W (t + 1) = W (t) − (Pwu + Pwp)W (t) + PuwU(t) + PpwP (t)
(2.6)
dove i coefficienti del sistema (2.6) sono le probabilita di tran-
sizione tra stati differenti: per esempio Ppu e la probabilita di tran-
sizione dallo stato pedone allo stato utente e analogamente le altre. Le
probabilita di transizione sono calcolate come funzioni della geometria
urbana secondo la tabella 2.1 dove r = Ns/Nn e la densita di stazioni,
fw = (Ns − Nt)/Ns da la densita di stazioni vuote sulla linea, τ e il
tempo medio utilizzato da un utente su un treno (lo si e scelto pari
a 5 intervalli temporali, corrispondenti ad un tragitto di 5 stazioni) e
pc e la probabilita di cambiare la direzione di treno (pc = 1/2 nelle
simulazioni).
32

Ppu = r − Ppw Ppw = r(Nhsf3w + (Ns − Nhs)f
4w)/Ns
Pup = (1 − pc)/τ Puw = pc((Ns − Nhs)f2w + Nhs)/(Nsτ)
Pwp = 0 Pwu = 1 − f 2w
Tabella 2.1: Tabella: probabilita di transizione per le equazioni dicampo medio
Nella definizione di Puw si e tenuto conto che la possibile scelta
di un treno e differente per le stazioni interne (4 direzioni) rispetto
ai capolinea (3 direzioni); Puw dipende dalla memoria individuale che
impedisce la scelta di direzioni opposte e dal fatto che, quando un
cittadino cambia treno al capolinea aspetta almeno un intervallo tem-
porale. Le eq. (2.6) non sono lineari per tutti i tempi se la capacita
dei treni e limitata, poiche Ppu e Pwu sono zero quando viene rag-
giunta la soglia di saturazione del treno scelto. Esiste una legge di
conservazione per le frequenze: P (t) + U(t) + W (t) = 1 e possono
essere scritte due differenti equazioni non-omogenee indipendenti. La
soluzione all’equilibrio (t → ∞) e data da
P∞ = PupPwu
R
U∞ = Pwu(Ppu+Ppw)
R
W∞ = 1 − P∞ − U∞
(2.7)
dove R = Pup(Ppw + Pwu) + (Puw + Pwu)(Ppu + Ppw).
Una generica soluzione dell’equazione (2.6) rilassa esponenzialmente
alla soluzione di equilibrio.
Dai risultati delle simulazioni, descritti in figura 2.1, con differenti
valori di Nt = 5, 7, 10 e capienza infinita dei treni e condizioni iniziali
P (0) = 1, U(0) = W (0) = 0, si nota l’ottimo accordo tra le soluzioni
dell’eq. (2.6) e i valori delle tre frequenze, oltre la dipendenza di W∞
33

0 10 20 30 40 50intervalli temporali
0
0.1
0.2
0.3
0.4
perc
entu
ale
0 10 20 30 40 50intervalli temporali
0
0.1
0.2
0.3
0.4
perc
entu
ale
0 10 20 30 40 50intervalli temporali
0
0.1
0.2
0.3
0.4
perc
entu
ale
U(t)
W(t)
U(t)
W(t)
U(t)
W(t)
Figura 2.1: Confronto tra le soluzioni di campo medio U(t) e W (t) (li-nee continue) e i risultati della simulazione (diamanti) senza attrazionecronotopica per valori differenti di Nt (numero di treni per ogni linea):Nt = 5 a sinistra, Nt = 7 al centro e Nt = 10 a destra.
da Nt. Se consideriamo la mobilita media definita come
m(Nt) = P∞(Nt) + vupU∞(Nt) (2.8)
in funzione del numero dei treni, si vede (cfr. figura 2.2) che m
cresce rapidamente per bassi valori di Nt e raggiunge il valore asin-
totico per Nt ≥ 10 che corrisponde ad una densita di treni ≥ 1/2 su
ogni linea.
La situazione e piu complicata quando si considerano gli effetti
dei cronotopi. Per Nt = 0 la dinamina dei cittadini e un driven
random walk su una griglia uniforme con un intervallo di memoria;
le probabilita di transizione date dall’equazione (2.2) con n = 4 e
fı (ı = 1, ..., 4) coincidono con le proiezioni della forza cronotopica
sugli assi coordinati. Se la distribuzione dei cittadini ρp(x, y, t) cambia
molto poco rispetto alla scala spaziale data dalla distanza di due nodi
vicini e rispetto alla scala temporale corrispondente ad un singolo
intervallo d’integrazione, allora e possibile fare un limite al continuo e
scrivere un’equazione di Fokker-Planck
D−1p
∂
∂tρp =
[
− ∂
∂xfx −
∂
∂yfy +
1
2
(
∂2
∂2x+
∂2
∂2y
)]
ρp (2.9)
dove Dp = ∆x2/∆t e il coefficiente di diffusione.
34

0 2 4 6 8 10 12 14 16 18 20Numero treni Nt
1
1.2
1.4
1.6
1.8
2
2.2
2.4
mob
ilita
’ med
ia
Figura 2.2: Grafico della mobilita media in funzione di Nt (numero ditreni per ogni linea).
L’effetto di memoria introduce un piccolo termine di correlazione
nella dinamica pedonale che puo essere trascurato nell’evoluzione me-
dia descritta dall’eq. (2.9). Inoltre, notando che l’eq. (2.9) e sepa-
rabile, il calcolo di ρp si riduce alla soluzione di un’equazione unidi-
mensionale. Poiche la forza cronotopica ammette un potenziale (cfr.
eqs (2.4) e (2.4)), allora esiste una soluzione stazionaria asintotica-
mente stabile dell’equazione (2.9) alla quale ogni soluzione converge
con un tempo caratteristico proporzionale alla derivata seconda del
potenziale calcolata nel centro del cronotopo. Nella simulazione lo
spazio urbano e un quadrato [−1, 1] × [−1, 1] per cui ∆x = .02 in
quanto ci sono 101 nodi per ogni lato. Il coefficiente di diffusione e
D = 4 × 10−4 (∆t = 1) e la forza cronotopica e definita in accordo
all’equazione (2.4) dove rc ∈ [0,√
2] e c1 = 1/√
2 per soddisfare la
condizione pı ≥ 0 nell’eq. (2.2). La distanza di cammino massimo r0
(cfr. eq. (2.5)) e stata posta uguale a 0.1 u.g. (unita grafiche), che e
la distanza tra due stazioni adiacenti.
Il confronto tra la popolazione nei cronotopi risultata dalle prove
35

0 100 200 300 400intervalli temporali
0
0.1
0.2
0.3
0.4
perc
entu
ale
−1 −0.5 0 0.5 1x
0
2
4
6
ρp
t=30
t=70
t=100
Figura 2.3: Grafico di sinistra: confronto tra la percentuale di popo-lazione nei cronotopi calcolata risolvendo l’eq. (2.9) (linee continue)e la simulazione (diamanti) per lo spazio urbano Manhattan-like con100,000 cittadini e senza treni. Dopo 300 step il cronotopo si spegne.Grafico a destra: proiezione orizzontale della soluzione dell’eq. (2.9)a tempi diversi.
dirette senza treni (Nt = 0) e quella calcolata risolvendo le equazioni
di Fokker-Planck, con pedoni uniformemente distribuiti nello spazio
urbano e con illimitata capienza dei treni, dimostra un accordo molto
buono e prova che il limite al continuo e capace di descrivere l’evoluzione
delle medie delle grandezze. Si osserva, inoltre, che il tempo di rilassa-
mento e ' 100 intervalli temporali e che la distribuzione stazionaria
e gaussiana poiche il potenziale cronotopico e quadratico. Quando si
introducono i treni, si considera anche la dinamica dei cittadini sul-
la rete dei mezzi pubblici. Anche se la distribuzione delle stazioni
ha un carattere piu granulare, si e provato lo stesso ad applicare il
limite al continuo per descrivere la dinamica delle quantita medie.
La distribuzione degli utenti ρu(x, y, t) soddisfa la stessa equazione di
Fokker-Planck con un coefficiente di diffusione
Du = v2upDp (2.10)
dove il fattore v2up tiene in conto la velocita dei treni. Se si accoppiano
le due distribuzioni ρp e ρu che vengono fuori da una versione locale
delle equazioni di campo medio, si ha
36

ρp(t + 1) = ρp(t) − (Ppu + Ppw)ρp(t) + Pupρu(t) + Pwpρw(t)
ρu(t + 1) = ρu(t) − (Pup + Puw)ρu(t) + Ppuρp(t) + Pwuρw(t)
ρw(t + 1) = ρw(t) − (Pwu + Pwp)ρw(t) + Puwρu(t) + Ppwρp(t)
(2.11)
dove ρw(x, y, t) e la distribuzione delle persone in attesa e la proba-
bilita di transizione dipende dalla posizione. Bisogna distinguere due
casi: se i nodi non appartengono al cronotopo, le probabilita di tran-
sizione sono calcolate in accordo alla tabella 2.2, altrimenti si usa la
tabella 2.3. Nella tabella 2.2 e stato scelto τ = 20 per evitare che
un cittadino abbandoni il treno prima di arrivare al cronotopo. Le
differenze tra le definizioni date nelle tabelle 2.1 e 2.2 sono dovute alla
scelta intelligente dei treni fatta dai cittadini per cui, in una stazione
che non si trova sul bordo, solo due direzioni soddisfano la condizione
di ridurre la distanza dal cronotopo. I valori in tabella 2.3 significano
che un cittadino abbandona con certezza un treno quando arriva al
cronotopo e non prende ulteriori treni nell’area cronotopica.
Ci si aspetta che il sistema completo (due equazioni di Fokker-
Planck accoppiate col sistema (2.11)) possano descrivere l’evoluzione
delle variabili medie se la densita dei treni su ogni linea non e troppo
piccola in modo tale da evitare effetti di distribuzione granulare. An-
che in questo caso il confronto e buono (Nt = 10 e 100,000 cittadini
distribuiti uniformemente). Si osserva una crescita iniziale degli utenti
dovuta alle equazioni di campo medio (2.11), mentre la diminuzione
successiva e il rilassamento alla soluzione asintotica dell’equazione di
Fokker-Planck con il coefficiente di diffusione utente (2.10), quando
gli utenti arrivano presso il cronotopo.
37

0 100 200intervalli temporali
0
0.1
0.2
0.3
freq
uenz
a ut
enti
0 100 200intervalli temporali
0
0.1
0.2
0.3
freq
uenz
a ut
enti
0 100 200intervalli temporali
0
0.1
0.2
0.3
freq
uenz
a in
atte
sa
0 100 200intervalli temporali
0
0.1
0.2
0.3
freq
uenz
a in
atte
sa
0 100 200intervalli temporali
0.6
0.7
0.8
0.9
1
freq
uenz
a pe
doni
0 100 200intervalli temporali
0.6
0.7
0.8
0.9
1
freq
uenz
a pe
doni
Figura 2.4: In alto: confronto tra le frequenze P (t), U(t) e W (t)calcolate nell’approssimazione del limite al continuo (curve) e le sim-ulazioni numeriche (diamanti) in uno spazio urbano Manhattan-likecon Nt = 10 treni per ogni linea e 100,000 cittadini. In basso: lostesso di sopra ma con Nt = 1.
Ppu = r − Ppw Ppw = r (Nhsfw + (Ns − Nhs)fw/Ns)
Pup = (1 − pc)/τ Puw = pc((Ns − Nhs)f2w + Nhs)/(Nsτ)
Pwp = 0 Pwu = 1 − f 2w
Tabella 2.2: probabilita di transizione fuori dei cronotopi
Ppu = 0 Ppw = 0
Pup = 1 Puw = 0
Pwp = 0 Pwu = 0
Tabella 2.3: probabilita di transizione nei cronotopi
38

Capitolo 3
Sviluppo del modello e
applicazione sul centro
storico di Rimini
Ogni modello matematico soffre di approssimazioni strutturali e oper-
ative che possono arrivare a falsare le previsioni stesse del modello; e
quindi opportuna una fase di calibrazione del sistema, tale da renderlo
affidabile.
Una volta validato il modello con l’approccio statistico, provando
l’ottimo accordo con lo studio analitico applicato al sistema spazio-
temporale discreto con una topologia elementare e regolare come quel-
la a scacchiera di Manhattan, si e presentato il bisogno di sviluppare
aspetti del modello per renderlo piu attinente alla realta.
Si e proceduto organizzando simulazioni con dati concreti riguardan-
ti un’area urbana la conoscenza delle cui strutture dinamiche ci perme-
ttesse di avere un riscontro delle previsioni e di catturare altri elementi
chiave della dinamica non veicolare che si sviluppa nelle citta moderne.
39

3.1 La psicologia del pedone
in relazione al moto in citta
Da circa trenta anni numerosi ricercatori di svariate discipline si stanno
occupando dello studio delle relazione comportamentali tipiche del
cittadino pedone con l’area urbana nella quale si muove. Oltre ai
punti esaminati nel primo capitolo di questa tesi che trattano aspetti
meccanici e microscopici del moto pedonale, cito altre caratteristiche
del pedone che lo riguardano su un piano piu generale, psicologico e
sociologico.
Si e notato che
• i pedoni sono disposti a pagare con disagi concreti (difficolta nel
camminare, cammino piu lungo) per soddisfare le loro esigenze
psicologiche (cfr. The Social Life of Small Urban Spaces, di W.
H. Whyte, 1980);
• distrazioni e piaceri divertono il pedone e quindi vengono con-
siderati nel momento in cui pianifica di minimizzare la distanza
e gli sforzi, sebbene tenga ben presente fattori fisici come portare
oggetti pesanti (Garling e Garling, 1988);
• non sono influenzati dal sistema fisico e dall’esteriorita del per-
corso, se devono svolgere attivita ”necessarie” come andare a
lavoro, fare spesa, prendere un autobus, ecc.;
• sono fortemente condizionati dalle condizioni esteriori (che de-
vono essere ottimali) se hanno deciso di svolgere attivita ”opzion-
ali”, come una passeggiata, trovarsi in situazioni di ”socialita
vasta” oppure sedere su una panchina, ecc. (Life Between Build-
ings, J. Gehl).
Naturalmente questi parametri comportamentali sono condizionati
dalla conoscenza dell’ambiente, delle strade, della posizione dei centri
da raggiungere, in quanto portano il pedone, se ne e capace, a formu-
lare possibili strategie che ne regolano la mobilita. Pertanto, si hanno
40

comportamenti razionali e consci, ma anche adattivi nel caso in cui il
pedone non sia esperto del luogo, sia un esploratore. Tale comporta-
mento adattivo e uno dei caratteri piu importanti dei sistemi complessi
poiche questo implica l’interazione tra le componenti del sistema con
l’obiettivo di migliorare le scelte e i movimenti. Il comportamento
sociale e, infatti, un comportamento, in linea di principio, adattivo,
cosa che rende possibile lo studio della societa sotto forma di sistema
complesso.
Inoltre l’interesse va a toccare anche i cosiddetti comportamen-
ti d’imitazione (Castelfranchi, 1997) per cio che riguarda interazioni
sociali semplici: la maggior parte dei comportamenti di imitazione ap-
partengono ad una fascia psicologica detta dei comportamenti reattivi
che si manifesta, per esempio, in situazioni di affollamenti.
Di seguito saranno esposti alcuni concetti che caratterizzano le
individual-based simulations, nelle quali vengono modellizzati un cer-
to numero di comportamenti dell’individuo - agente -, in relazione
all’ambiente in cui si muove e agli oggetti con cui interagisce.
3.2 Proprieta di un modello ad agenti
Lo sviluppo di software orientato ad oggetti ha incentivato, in questi
ultimi anni, il massiccio utilizzo di modelli agent-based. Le simulazioni
a multi-agente sono completamente soddisfacenti per dinamiche spazio-
temporali discrete. Di queste, esse permettono l’esplorazione di re-
lazioni tra le azioni individuali, a livello microscopico, e i fenomeni
emergenti a livello macroscopico. Essenzialmente gli agenti sono en-
tita autonome. Secondo la definizione data da Franklin e Graesser
(1997) un agente autonomo e un sistema situato dentro una parte di
un ambiente: l’agente lo percepisce e opera in e su di esso, segue la sua
propria agenda e, con le sue azioni, genera effetti che sentira successi-
vamente. Gli stessi autori della definizione hanno proposto un elenco
di proprieta che caratterizzano un agente. Egli deve essere:
• reattivo: risponde volta per volta ai cambiamenti dell’ambiente;
41

• autonomo: esercita un controllo sulle sue azioni;
• goal-oriented : non agisce semplicemente in risposta all’ambiente,
ma possiede degli scopi;
• apprendente, adattivo: cambia il suo comportamento in base
alla sua precedente esperienza;
• flessibile: le azioni non sono prescritte;
• carattere: ha una ”personalita” e/o stati emotivi.
Sostanzialmente, l’interazione tra gli agenti puo avvenire oltre che
per le loro caratteristiche intrinseche, anche attraverso l’ambiente che
fa da intermediario. In tal modo, esso supera, comunque mantenen-
dola, la banale funzione di quadro entro cui si svolge l’azione, di vincolo
spaziale della dinamica interna.
3.3 Sviluppo e ampliamento degli elemen-
ti del modello cronotopico
Il modello descritto nel capitolo precedente prevedeva come principali
soggetti dinamici i pedoni e i veicoli di trasporto pubblico; era, quindi,
un modello a due velocita. Ora, in aggiunta al moto pedonale sulla rete
viaria, e stato introdotto quello dei ciclisti, che ha molte caratteristiche
simili al precedente ma velocita diversa e soprattutto capacita limitate
di cambiare stato. Il modello prevede che il ciclista non aspetti mai
in una fermata dell’autobus, ne che diventi utente. Infatti, egli non
abbandona mai la bicicletta, nel senso che, verosimilmente, quando
raggiunge un area d’interesse, avra con se la bicicletta o la deporra
molto vicino. Per il resto, il ciclista ha tutte le caratteristiche del
pedone che, conseguentemente agli studi comportamentali discussi in
precedenza, giocano un ruolo ora piu importante nella descrizione della
dinamiche sociali.
42

3.3.1 Il comportamento del pedone nello spazio
urbano
Il pedone appartiene a classi sociali secondo percentuali ben definite,
siano esse riferite ai cittadini che risiedono nell’area urbana sotto stu-
dio che a quelli che provengono dall’esterno. Gli e assegnata casual-
mente una personalita che si manifesta in comportamenti di imitazione
o di reazione opposta rispetto ai comportamenti altrui. Nel caso non
siano mossi dalla necessita di raggiungere un’area in particolare del-
la citta, il loro moto e quello tipico degli esploratori erratici i quali
scelgono la strada da percorrere casualmente, lasciandosi influenzare
dalla qualita della strada e dalla sua occupazione locale. Quest’ulti-
ma pesa positivamente nella scelta se il pedone ha attitudini di im-
itazione. Da tale comportamento, come ho gia accennato, ci si as-
pettano affollamenti locali, senza una vera e propria ragione. Nella
situazione opposta, se ha atteggiamenti solitari, sceglie strade laterali
meno affollate.
La distribuzione del numero di pedoni e a discrezione dell’utente
del simulatore e puo essere a grandi linee determinata ogni passo,
rispettando dati specifici o andamenti plausibili. Si puo quindi redi-
gere un quadro di percentuali, come ho fatto nel caso del centro storico
di Rimini, riguardanti la creazione di pedoni e ciclisti secondo tempo
e luogo. Alcuni vengono creati uniformemente in nodi casuali della
topologia (popolazione residente), altri vengono creati nei nodi di us-
cita periferici (persone entranti a piedi), altri ancora vengono creati in
particolari nodi sorgenti durante un intervallo particolare della gior-
nata e, per finire, ci sono cittadini creati, in stato utente, sui treni,
quando entrano nella citta, secondo percentuali indicative settate a
priori. Caratteristica dei pedoni che escono dai nodi sorgente, e che
il pedone puo avere proprieta affini alle caratteristiche del cronotopo
piu vicino. Questo e verosimile, in quanto, essendo le sorgenti, in
questo caso, aree di parcheggio, i cittadini sono tentati di parcheg-
giare vicino all’area d’interesse, sia essa un supermercato, un centro
commerciale, un mercato, un luogo di lavoro o di studio, ecc... A tale
43

proposito, riporto la seguente tabella (3.1) in cui vengono associati al
nome del parcheggio la fascia oraria di funzionamento e la percentuale
secondo cui si stabilisce il numero di pedoni che escono da tale area,
relativamente a tutte le altre.
NOME PARCHEGGIO FATTORI ORARI
P. Piazza Malatesta 0.10 7:30 20:00P. Piazza Gramsci 0.09 7:30 20:00P. Rocca Malatestiana 0.06 7:30 20:00P. Piazza Ferrari 0.02 7:30 20:00P. Gambalunga 0.02 7:30 20:00P. Tonti 0.01 7:30 20:00P. Giovanni XXIII 0.04 7:30 20:00P. Tiberio 0.12 7:30 20:00P. Fracassi 0.10 7:30 20:00P. Piazzale Cervi 0.04 7:30 20:00P. Bastioni Settentrionali 0.02 7:30 20:00P. Olga Bondi 0.02 7:30 20:00P. Tosi-Ceccarelli 0.03 7:30 20:00P. Roma 0.12 7:00 20:00P. XX Settembre 0.05 7:30 20:00P. Valturio 0.09 7:30 20:00P. Saffi 0.06 7:30 20:00P. Scalo merci 0.08 6:00 21:00P. area ex Sartini 0.03 7:30 20:00P. Castracane 0.01 7:30 20:00
Tabella 3.1: Quadro dei nodi sorgenti.
Tali fattori normalizzati all’unita vanno a moltiplicare un valore
di per se ricavato come una frazione della popolazione non residente
nel centro di Rimini. Il resto di tale frazione entra nell’area urbana
attraverso i mezzi di trasporto pubblico, a piedi o in bicicletta, secondo
percentuali definite (cfr. tabella 3.5).
Il pedone, inoltre, e cosciente della sua destinazione, e della col-
locazione di questa, ma non conosce il piano globale delle strade, per
cui, anche se attratto da una forza di drift verso una determinata area,
non puo costruire strategie complete di cammino minimo e compiere
44

cosı spostamenti troppo razionali che, come si e visto, non sono carat-
teristici del moto degli individui nelle aree urbane moderne. Anche il
tempo che trascorre in un cronotopo e segnato da un parametro per-
sonale casualmente attribuito, cioe l’iperassorbimento, che ne aumenta
la permanenza. Possiede una sorta di DNA che tiene conto dell’eta,
sesso, lavoro, hobbies, ecc... che viene confrontato con quello dei pos-
sibili frequentatori di ciascun cronotopo prima di stilare l’agenda dei
propri impegni giornalieri.
Ora riesce a gestire nel modo migliore gli impegni che ha in gior-
nata: (i) ordina i cronotopi per affinita, se dipende da qualcuno di
loro; (ii) prima che il cronotopo cui propende con maggiore forza sia
attrattivo, viene scritto in una lista in base al tempo che manca, per
cui, una volta passato questo tempo, inizia a sentire l’attrazione del
cronotopo e si muove in anticipo verso di questo, come se fosse acceso.
In questo processo e calcolato anche il tempo di movimento antici-
pato: infatti, al tempo che manca all’accensione viene sottratto un
tempo indicativo con il quale il pedone potrebbe raggiungere la sua
destinazione. Tale tempo viene calcolato secondo una legge lineare
rispetto alla distanza da percorrere (la costante di proporzionalita e
settata a priori per tutti). Una volta visitato il cronotopo, se ha al-
tre mete nell’agenda, la scelta del successivo avviene secondo criteri
di minor perdita di tempo e priorita: naturalmente, se il tempo che
manca prima che senta l’attrazione per il secondo cronotopo e superi-
ore a una certa soglia (40 minuti, nella simulazione), il pedone si sente
libero di muoversi, senza compiti momentanei. Raggiunta la prossima
meta in lista, vi sosta per un tempo tipico del cronotopo sempre che
il cronotopo non si spenga prima. Da aggiungere a tale tempo, c’e
un tempo addizionale tanto maggiore quanto il cronotopo, che non
ha una capienza limitata assegnata, e sensibile all’affollamento locale.
Una volta visitato, il pedone non potra piu fermarsi in quel cronotopo.
Se tutti i cronotopi sono spenti, alla fine della giornata, oppure ha gia
visitato tutti quelli in agenda, puo scomparire istantaneamente dalla
citta se residente (simulando il rientro a casa) o uscirne da uno dei
45

nodi periferici (scelto a caso), a piedi se e vicino, oppure con un treno
se riesce a trovarne qualcuno che si dirige nella direzione di uscita.
3.3.2 La scelta delle strade
Le strade sono caratterizzate da un parametro chiamato attrattivita
legato alla sensazione di piacere che provocano a chi le percorre. Tale
aspetto interviene nel caso di mobilita senza scopi, non mossa da ne-
cessita particolari, tipica delle persone che sottomettono il loro movi-
mento alla propria curiosita esploratrice. La gradevolezza della stra-
da, come altrimenti si puo definire, e calcolata come somma lineare
di altri tre parametri: bellezza, sicurezza, larghezza dei marciapie-
di, pesati a loro volta con tre costanti normalizzate a 1. Quindi,
l’attrattivita = α · ′′bellezza′′ + β · ′′sicurezza′′ + γ · ′′marciapiedi′′
(dove α = β = γ = 1/3).
Frequenti sono i casi in cui il pedone o il ciclista si trova presso un
incrocio; quest’ultimo (inteso come entita nodo) avra un’attrattivita
pari alla maggiore tra quelle delle strade che si intersecano.
3.3.3 Il trasporto pubblico a Rimini
In fase di start-up, le stazioni e gli autobus che si fermano in esse
sono etichettati in base alla funzionalita che essi possono avere nel
raggiungimento di ciascun cronotopo, definendo, cosı, quali linee sono
utili e in che direzione devono essere percorse.
Per quanto riguarda il centro di Rimini, ho studiato i tabulati delle
linee principali che lo attraversano e ho organizzato i dati secondo
la tabella 3.2. In aggiunta vi sono, scritte nel file apposito per il
simulatore, le liste di orari di ogni singolo autobus di ciascuna linea,
in modo da completare la descrizione.
L’utilizzo degli autobus si presenta con caratteri di dinamicita,
flessibilita e con una lieve stocasticita. Tutto questo per rispettare la
naturale esigenza del cittadino di cambiare linea per avvicinarsi mag-
giormente alla propria meta. Questo schema implica che le stazioni
siano a loro volta dei centri attrattori momentanei per il pedone, con
46

IDENTIFICATIVO LINEA A B C D E F G
linea 1 1 3 0 100 0.02 6 nihillinea 2 2 4 4 100 0.02 5 nihillinea 3 1 2 0 100 0.02 7 4linea 6/ 1 1 0 70 0.02 2 nihillinea 7 2 1 1 100 0.02 5 nihillinea 8 2 1 1 100 0.02 3 nihillinea 9 2 1 1 100 0.02 3 nihillinea 15 1 1 0 100 0.02 9 5linea 16 2 1 1 100 0.02 5 nihillinea 18 1 1 0 100 0.02 4 nihillinea 19 1 1 0 100 0.02 4 nihillinea 21 2 1 1 100 0.02 4 nihillinea 90 2 1 1 100 0.02 4 nihil
A = numero di direzioni, B = numero di treni per direzione 1, C = numero di treniper direzione 2 se esiste, D = capienza dei treni di quella linea, E = percentualedegli utenti esterni che entrano in citta da ciascun treno, F = numero fermate diciascuna linea presenti in citta e G = ordinale della fermata capolinea.
Tabella 3.2: Quadro delle linee urbane.
un campo di forza di drift uniforme. Una volta raggiunta la stazione
piu vicina al pedone, al momento della sua valutazione, si studiano gli
orari dei treni che devono passare. Nel caso che il primo treno arrivi
entro un tempo di attesa ragionevole (attesa massima, cfr. paragrafo
3.4), il pedone passa nello stato di attesa. A tal proposito, si noti che,
se ogni autobus ha una capienza massima, l’attesa puo aumentare se e
occupato nel momento in cui arriva alla fermata. Diventato utente, si
accerta che l’autobus su cui viaggia lo possa condurre direttamente al
cronotopo desiderato; in caso contrario decide di scendere e attendere
un altro treno di un’altra linea o recarsi in una stazione vicina. Di
conseguenza, le valutazioni avvengono ad ogni passo e sono fatte con
lo scopo di capire se restare su quel treno sia conveniente. Come nel
caso reale, i treni hanno fermate capolinea, possono avere percorsi cir-
colari all’interno della stessa area, oppure entrare solo per alcuni tratti
in citta. Il pedone utente, in caso di fermata capolinea su un percorso
andata e ritorno, scende dal treno, oppure, nel caso che questo esca
47

dall’area urbana, esce con lui, se non e sceso prima, e scompare dalla
simulazione. Ci sono casi in cui gli autobus non completano la loro
serie completa di fermate, come si puo intuire dagli orari e questo
costringe gli utenti a scendere per evitare perdite di tempo.
Per quanto concerne gli aspetti dinamici dell’utilizzo del mezzo
pubblico e in particolar modo per il calcolo della mobilita, si puo sti-
mare che ogni fermata raggiunta su un autobus da ciascun individuo
contribuisca positivamente di una quantita media che dipende dalle
caratteristiche della citta; questa quantita consiste, in termini di sim-
ulazione, di qualche intervallo temporale, cioe quanto tempo un pe-
done in media impiegherebbe a percorrere la distanza tra una fermata
e l’altra (cfr. tabella 3.5, parametro ”distanza media tra fermate”).
3.3.4 Aspetti dinamici: i campi di attrazione
Parlando del moto del pedone o del ciclista, si e detto che, per adem-
piere al successivo impegno in agenda o per uscire dalla topologia,
l’individuo ha attrazioni, rispettivamente, verso le fermate degli au-
tobus e verso i nodi periferici. La forza con cui la stazione o il nodo
attrae il pedone o il ciclista ha un range da 0 a C dipendenti dalle
componenti della distanza. La componemte orizzontale della forza e
Fx = C · ∆x
∆x + ∆y(3.1)
e quella verticale
Fy = C · ∆y
∆x + ∆y(3.2)
dove ∆x e ∆y sono le distanze orizzontali e verticali tra la posizione
dell’individuo e del centro attrattore e C e una costante propria dei
nodi; essa assume un valore in base al fatto che il nodo sia una stazione
o un nodo di uscita.
La forza con cui il cronotopo ı attrae il pedone o il ciclista dipende
dai tre parametri positivi che definiscono il potenziale relativo: nelle
formule seguendi sono indicati con aı , bı e cı. La linearita della forza
nella distanza z = ∆x + ∆y dipende dal secondo di questi parametri
48

(bı = 2.0) mentre il profilo cambia a seconda che il cronotopo sia forte
o debole (cfr. le definizioni 2.4 e 2.4). A differenza delle precedenti
definizioni si e introdotto un ulteriore parametro, il terzo, che per-
mette di definire il minimo potenziale diverso da zero che, nel caso
di potenziale quadratico, si manifesta in un’attrazione addizionale e
costante, indipendente dalla distanza. Con questo grado di liberta
in piu ho voluto rappresentare le due categorie di cronotopi differen-
ziandone ulteriormente gli elementi. Nel caso di cronotopo forte, la
componemte orizzontale della forza e
F ıx = C · aı bı
∆x
∆x + ∆y(cı + z)bı−1 (3.3)
e quella verticale
F ıy = C · aı bı
∆y
∆x + ∆y(cı + z)bı−1 (3.4)
mentre per i cronotopi deboli:
F ıx = C · aı bı
∆x
∆x + ∆y(cı + z)bı−1 (3.5)
e
F ıy = C · aı bı
∆y
∆x + ∆y(cı + z)bı−1 (3.6)
se l’individuo si trova ad una distanza minore di R, detto raggio debole
ed espresso in u.g. (cfr. tabella 3.5), e
F ıx = C · aı bı
∆x
∆x + ∆y
(cı + R)bı
cı + z(3.7)
e
F ıy = C · aı bı
∆y
∆x + ∆y
(cı + R)bı
cı + z(3.8)
dove C e una costante di normalizzazione uguale per tutti i cronotopi,
aı, bı e cı sono le componenti di campo tipiche di ciascun cronotopo.
Si noti che non c’e sovrapposizione di campi nel modello in ques-
tione; infatti, l’individuo sente solo un tipo di attrazione per volta la
quale agisce favorendo la scelta di strade orientate verso la meta.
49

3.3.5 I cronotopi e l’individuo
Nel centro storico di Rimini l’individuazione dei cronotopi e stata por-
tata avanti con la collaborazione del dottor M. Zaoli - presidente degli
architetti di Rimini - il quale e stato un punto di riferimento per tutte
le osservazioni sulla citta e per il recupero e l’interpretazione dei dati
relativi ad essa. Abbiamo, cosı scelto una decina di cronotopi tra i
luoghi predisposti al pubblico: quelli che riporto nella tabella 3.3 ci
sono sembrati i piu importanti. La forza che essi esercitano su partico-
lari individui dipende, oltre che dal vettore posizione rı che dal centro
del cronotopo segue il pedone ı passo dopo passo, anche da parametri
che ne modificano il potenziale: i ”coefficienti di campo”. Per il caso
specifico di Rimini, ho definito, a primo acchito, tutti i cronotopi forti
ed ho scelto per ognuno un potenziale quadratico, fissando il secondo
coefficiente a 2.0 (cfr. equazioni 3.3 e 3.4 e tabella 3.3, colonna B)
e scegliendo come unico elemento di distinzione l’intensita della loro
attrazione variando il primo coefficiente di campo (cfr. tabella 3.3,
colonna A).
NOME CRONOTOPO A B C D E F
casa di cura 3.0 2.0 5.0 0.2 0xe0020000 30scuola media 4.0 2.0 5.0 0.01 0xd4b41000 240stazione FS 5.0 2.0 5.0 0.23 0xc0182000 20piazza Tre Martiri 3.0 2.0 5.0 0.1 0xf7f8e000 20mercato della Rocca 5.0 2.0 5.0 0.3 0xd460a000 40mercato delle verdure 5.0 2.0 5.0 0.3 0xd460a000 40universita 5.0 2.0 5.0 0.01 0xf6b44000 60piazzetta e viette 5.0 2.0 5.0 0.2 0xd2b88000 40poste Gambalunga 3.0 2.0 5.0 0.5 0xf7e7f000 30poste centrali 3.0 2.0 5.0 0.5 0xf7e7f000 30laboratori Farmacia 5.0 2.0 5.0 0.01 0xf6b44000 30
A = prima componente di campo, B = seconda componente di campo, C = terzacomponente di campo, D = parametro di sensibilita all’affollamento, E = mascheradi compatibilita ed F = sosta minima.
Tabella 3.3: Settaggio dei parametri dei cronotopi.
50

Il parametro di sensibilita all’affollamento entra nel calcolo del tem-
po di permanenza in uno qualsiasi dei nodi interni al cronotopo, come
anche l’ultimo dei parametri (sosta minima); la maschera del crono-
topo e legata alle caratteristiche di eta, sesso, impiego ed interessi cos-
tituenti il corredo privato e peculiare dell’individuo che tipicamente lo
frequenta. Essa non e altro che la somma di valori, cfr. tabella 3.4,
che sono associati a queste caratteristiche.
UOMO DONNA ANZIANO0x80000000 0x40000000 0x20000000
GIOVANE BAMBINO LAVORATORE0x10000000 0x8000000 0x4000000
STUDENTE UNIVERS. PENSIONATO DISOCCUPATO0x2000000 0x1000000 0x800000
CASALINGA RESIDENTE PENDOLARE0x400000 0x200000 0x100000
TURISTA INSEGNANTE OSPEDALIERO0x80000 0x40000 0x20000
AFFARISTA COMMERCIANTE INTELLETTUALE0x10000 0x8000 0x4000
PERDIGIORNO STUDENTE ALTRO altro..0x2000 0x1000 0
Tabella 3.4: Categorie sociali implementate e loro maschere.
Si noti che mentre la maschera del cronotopo riassume in se tanti e
a volte contraddittori aspetti dell’individuo (per esempio, ANZIANO e
GIOVANE, UOMO e DONNA, RESIDENTE e PENDOLARE, ecc.),
quella delle caratteristiche sociali del pedone o del ciclista non ha
elementi di incompatibilita, anche se vengono assegnate in modo ca-
suale (cercando, tuttavia, di rispettare statistiche generali che, nel
caso di Rimini, definiscono le percentuali riguardanti eta ed impiego
della popolazione del centro storico). A questo punto, si calcolano le
affinita tra individuo e cronotopi; piu le maschere si fondono insieme,
sono simili ed in particolare piu quella dell’individuo appartiene in
senso insiemistico a quella del cronotopo, maggiore e l’affinita. Cosı,
51

la persona in questione costruisce un’agenda di luoghi da raggiungere,
secondo priorita ben definite ed attinente alle proprie caratteristiche
e ai propri bisogni.
Nell’agenda non potranno comparire tutti i cronotopi per il fatto
che il cittadino non frequentera mai, in un sol giorno, tutti i luoghi
a lui predisposti. Si pone, cosı, il problema di fare una scelta sul
numero massimo di cronotopi che possono essere nell’agenda virtuale
del cittadino o del visitatore; se la scelta e verosimile, molti individui
riescono ad adempiere ai propri compiti e bisogni prima della chiusura
delle aree d’interesse (se sono luoghi al chiuso) o prima del termine
della giornata.
3.4 Parametri generici della simulazione
Per concludere la discussione sui dati utilizzati per le simulazioni nel
centro storico di Rimini, non resta che commentare alcuni parametri
oltre a quelli gia descritti nel proprio ambito di pertinenza. Per avere
una sintesi di quello che verra detto di seguito, si veda la tabella 3.5.
Il primo parametro che troviamo e l’intervallo di simulazione (IS)
cioe l’intervallo temporale reale entro cui l’individuo (a piedi o in bi-
cicletta) e chiamato a muoversi. Esso determina, percio, la velocita
della simulazione ma non quella della persona. Quest’ultima, infat-
ti, si sposta da nodo a nodo step by step ed e la distanza media tra
questi ultimi (calcolata in metri) che ne determina la velocita in quan-
to l’unita temporale associata ad uno step e sempre di un minuto. Di
conseguenza, l’intervallo di simulazione non e un parametro dinamico
e dipende perdipiu dalla potenza di calcolo del computer. Nelle sim-
ulazioni finora fatte e sempre stato posto ad un secondo (1000 ms)
come auspicio che il computer riesca in questo tempo a svolgere i suoi
calcoli per far muovere tutti.
Il secondo parametro e il cosiddetto fondo stocastico la cui semplice
funzione consiste nell’ aumentare la casualita nella scelta delle strade.
Un parametro di fondamentale importanza nell’utilizzo delle linee
52

GRANDEZZA VALORE NUMERICO
intervallo simulazione (IS) 1000 (in millisecondi)fondo stocastico 0.1attesa massima 20 (IS)quanti passi memorizzati 4 (nodi)numero chronotopoi 11numero topoi 2distanza media tra fermate 6 (nodi)cammino massimo 0.9 (u.g.)raggio debole 2.5 (u.g.)parametro di difficolta spostamento per pedoni 18.0 (IS/u.g.)parametro di difficolta spostamento per ciclisti 6.0 (IS/u.g.)
percentuale dei ciclisti * 17 (perc.)
percentuale entranti dalle sorgenti ** 53 (perc.)percentuale entranti coi treni ** 23 (perc.)percentuale entranti in bici ** 19 (perc.)percentuale entranti a piedi ** 5 (perc.)
percentuale lavoratori residenti *** 39 (perc.)percentuale studenti residenti *** 19 (perc.)percentuale pensionati residenti *** 28 (perc.)percentuale casalinghe residenti *** 9 (perc.)
percentuale turisti ** 30 (perc.)percentuale pensionati dalla periferia ** 10 (perc.)percentuale lavoratori dalla periferia ** 38 (perc.)percentuale studenti dalla periferia ** 14 (perc.)percentuale casalinghe dalla periferia ** 5 (perc.)
coefficiente marciapiede 1/3 (n.p.)coefficiente bellezza 1/3 (n.p.)coefficiente sicurezza 1/3 (n.p.)
proprieta dei pedoni adeguate ai cronotopi vero
distribuzione dei residenti nota falso
(u.g.) sta per unita grafiche, essendo la mappa normalizzata a [−1; 1]× [−1; 1].(*) percentuali rispetto alla popolazione totale in quel momento.(**) percentuali rispetto alla popolazione entrante in quel momento.(***) percentuali rispetto alla popolazione residente.
Tabella 3.5: Parametri generici della simulazione.
53

di trasporto pubblico e l’attesa massima, in quanto interviene nel mo-
mento della valutazione del pedone quando si trova in una fermata
(stazione). Esso rappresenta il limite accettabile di attesa e quindi
e legato alla pazienza dell’individuo e alla velocita della vita quotidi-
ana. Si nota che l’occupazione degli autobus e molto sensibile a questo
parametro soprattutto in momenti della giornata in cui le frequenze
degli autobus sono minori. Se un pedone che non ha particolari at-
trazioni vuole spostarsi in autobus, si portera alla fermata piu vicina
e attendera il primo autobus che passa. Nel caso questo non arrivi
entro un tempo (in IS) pari all’attesa massima, o arrivino solo treni
completamente pieni, il pedone esploratore si stanca di aspettare e
continua il suo moto a piedi: in tal caso l’attesa non e andata a buon
fine.
Sia nel moto pedonale che in quello ciclistico, l’individuo si ricorda
degli ultimi nodi che ha percorso per cui evita di ripercorrerli nella
successive mosse. La sua memoria e limitata a qualche nodo: nel caso
sia uno solo si puo parlare di moto stocastico con probabilita di tran-
sizione condizionate di tipo markoviano (come era nel caso di campo
medio). In una simulazione che tenti di rispettare il comportamen-
to umano, il valore di tale parametro puo esser fissato a 4, cioe un
individuo a piedi non compie mai un giro in un tempo inferiore a 5
”minuti”.
Dal numero dei chronotopoi e dei topoi si evince che esiste, nella
simulazione, un solo cronotopo che e suddiviso in topoi (due); questo
perche gli attrattori della dinamica dentro il centro di Rimini non
hanno estensione molto grande, ne attivita interne molto differenziate.
Un altro parametro che non interviene sulla scelta delle strade ma
sulla strategia globale del pedone e il cammino massimo di cui ho gia
parlato nel capitolo dedicato all’introduzione del modello in questione.
Esso fissa in linee del tutto generali la distanza massima percorribile a
piedi dal pedone per raggiungere un cronotopo dal punto in cui si trova
ed e , inoltre, utile per tracciare lo schema delle stazioni utili a tale fine.
Nella simulazione su Rimini, rappresenta circa la lunghezza del cor-
54

so d’Augusto (l’asse principale della citta) e determina fortemente la
richiesta dell’utilizzo degli autobus: essendo il centro di Rimini molto
piccolo, facilmente percorribile a piedi, il pedone decide di andare in
autobus solo per spostamenti da un capo all’ altro dell’area urbana.
I due parametri che seguono in tabella hanno le dimensioni dell’in-
verso di una ”velocita” in unita di similazione (IS/u.g.) ed esprimono
la difficolta di spostamento, rispettivamente, del pedone e del ciclista
(differiscono di un fattore 3, lo stesso fattore che c’e tra le rispet-
tive velocita). Ho usato il termine ”difficolta” perche tali parametri
sono utilizzati nel calcolo del tempo d’anticipo col quale l’individuo si
dovrebbe muovere prima che il cronotopo si accenda. Piu il percorso e
complesso e i campi dei cronotopi sono deboli, piu il valore assegnato
sara alto: in questo caso vale 18.0 (IS/u.g) per il pedone, il che vuol
dire che quest’ultimo impiega, a priori, 72 minuti per percorrere la
massima distanza osservabile nella cartina (sempre secondo la metrica
”Manhattan”, secondo cui la distanza e uguale a ∆x + ∆y espressi in
unita grafiche).
Le altre grandezze si commentano da sole o gia sono state spiegate
precedentemente.
Si noti in ultimo, comunque, la ”distribuzione dei residenti nota”,
introdotta nel caso si conosca la distribuzione spaziale dei residenti in
citta, cosa che non e stato possibile avere per Rimini. In mancanza
di questi dati, il programma, come detto a riguardo della creazione
dei pedoni, adotta una distribuzione spaziale uniforme per i residenti
(anche se sappiamo che non e cosı per Rimini).
3.5 Risultati di varie simulazioni
Le simulazioni sono state fatte tutte sul centro storico di Rimini (cfr.
fig. 3.9): la rete di nodi, ricavata da questo, presenta delle irrego-
larita, in qualche caso trascurabili in certi agglomerati di strade (gli
incroci sono pressapoco ortogonali) ma a volte meno, se si pensa alle
lunghe vie che separano la citta nei quattro quartieri dentro la circon-
55

vallazione (quartiere Clodia, Cittadella, Patara, Montecavallo) o al
canale Marecchia, attraversato dai due ponti, che separa il quartiere
di San Giuliano dal resto della citta, oppure, infine, alla circonval-
lazione esterna e ai Bastioni e alla ferrovia FS che circondano i quat-
tro quartieri centrali riducendo le vie di uscita nelle quali si canaliz-
zano grossi flussi di persone. A tal proposito, le strade hanno, ora,
un’attrattivita diversa da 1 (wı 6= 1, cfr eq. (2.2)), quindi, oltre alle
irregolarita geometriche dello spazio urbano, vi sono differenze, tra le
strade, di tipo ”estetico-psicologico”.
Per questi motivi, uno studio di campo medio non e possibile pro-
prio perche le approssimazioni di spazio omogeneo e regolare non sus-
sistono piu. Pur non giustificando le osservazioni che seguiranno con lo
stesso approccio statistico (teoria di campo medio) seguito in prece-
denza e non potendo scrivere un’equazione di Fokker-Planck per la
distribuzione della popolazione (cfr. le equazioni 2.6 e 2.9 del capito-
lo precedente), verranno presentati e commentati alcuni grafici creati
sulla scia delle simulazioni fatte per la citta Manhattan-like.
Usero i concetti di tempo e di velocita relativi alle unita tipiche del-
la simulazione per cui il tempo corrisponde alla successione di intervalli
temporali (un time step simula quello che dovrebbe succedere in un
minuto nell’arco della giornata), lo spazio e misurato in unita grafiche
(la mappa e immersa in un quadrato [−1, 1] × [−1, 1] ) e la velocita
corrisponde al numero di nodi visitati in un intervallo temporale.
3.5.1 Commenti
La figura 3.1 descrive l’andamento della varianza in funzione del tempo
in una situazione di diffusione senza attrazione cronotopica e senza
trasporto pubblico. I cittadini, tutti nello stato pedone, quindi con
velocita unitaria, si muovono a partire da un unico nodo centrale, in
qualche modo equidistante da quelli periferici. La loro ”memoria” e
nulla, quindi siamo in situazione di totale stocasticita, cosa che in
un reticolo omogeneo dovrebbe portare ad una dipendenza lineare dal
tempo.
56

0 3 7 10
0
0.09
minuti
varia
nza
Figura 3.1: Dipendenza della varianza dal tempo in una simulazione didiffusione con 200,000 pedoni che partono da uno stesso nodo, al centrodella citta (non c’e attrazione cronotopica ne autobus in circolazione).
In questo caso, invece, si ha una dipendenza della forma
σ = D · tα (3.9)
dove D rappresenta il coefficiente di diffusione. L’esponente reale α
e minore di 1, il che vuol dire che la dipendenza temporale e piu debole
a causa della geometria piu complessa. Il suo valore approssimato,
testimoniato dal grafico, e pari a 0.85.
Lo scopo delle simulazioni rimane ancora, ma in parte, quello di
descrivere la dinamica delle variabili globali U(t), W(t), P(t) e C(t),
che descrivono rispettivamente la frequenza relativa di utenti, persone
in attesa, pedoni e ciclisti. Il numero di cittadini usati nella simu-
lazione non e costante ma si adegua ogni step ad un particolare valore
letto da un file apposito. In tal modo si e posto un vincolo al numero
totale della popolazione presente nell’area di studio e a quella entrante
dall’esterno per controllare le condizioni al contorno del sistema, per
”stimolarlo” con criterio dall’esterno.
Per quanto riguarda i ciclisti e opportuno ricordare che la loro fre-
quenza relativa e costante a meno di fluttuazioni che possono durare
57

pochi intervalli di simulazione per due motivi: il loro numero e ”guida-
to” e la probabilita che si mettano in attesa nelle fermate, e men che
meno diventino utenti, e nulla.
448 515 581 648
0.00
1.00
minuti
perc
entu
ale
Figura 3.2: Frequenze delle popolazioni nel piano urbano con un solocronotopo e senza le linee urbane di autobus: in nero la frazione deipedoni liberi di muoversi, in rosso quella dei ciclisti in moto e in verdequella costituita da entrambi le categorie ferme nel cronotopo.
Nel caso in cui ci sia un solo cronotopo che crea la richesta di mo-
bilita, ci saranno persone che sentono questa attrazione e persone che
errano nella citta senza mete da raggiungere. L’interazione tra crono-
topo ed individuo, spiegata precedentemente, condiziona la mobilita
totale del sistema in quanto chi sente l’attrazione e raggiunge l’area
d’interesse deve poi sostare in essa per un tempo di permanenza tale
da spiegare l’andamento delle curve della figura 3.2: in questa, signi-
ficativa e la curva verde della frazione di popolazione in attesa, la cui
crescita iniziale e dovuta al numero crescente di persone che, in diversi
tempi, raggiungono il cronotopo, ma ancora piu interessante e la fase di
rilassamento esponenziale quando improvvisamente si annulla l’inter-
azione di cui sopra. Si noti che c’e continuita tra i due rami (crescente
e decrescente) in quanto, i pedoni, ormai predisposti ad attendere un
58

determinato tempo, non abbandonano immediatamente il cronotopo,
mentre non si generano nuove richieste di mobilita goal-oriented. Nella
vita reale questo comportamento puo essere paragonato alla situazione
in cui un ufficio che svolge relazioni con il pubblico (poste, banche, seg-
reterie, ecc.), arrivata l’ora di chiusura, termina di servire chi e gia al
suo interno ma non accetta piu persone dall’esterno.
662 729 795 862
0.00
1.00
minuti
perc
entu
ale
Figura 3.3: Frequenze delle popolazioni nel piano urbano con piucronotopi e senza le linee urbane di autobus: in nero la frazione deipedoni liberi di muoversi, in rosso quella dei ciclisti in moto e in verdequella costituita da entrambi le categorie ferme nel cronotopo.
Quello che, invece, accade nella successiva simulazione, descritta
in figura 3.3, e lievemente diverso: al di la del fatto che ora sono
molteplici i luoghi di attrazione, la differenza principale che giustifica
le discontinuita presenti nella curva relativa ai pedoni in moto (nera)
e quella relativa alle persone in sosta (verde) e la modalita con cui
termina l’interazione tra cronotopi e individui. Quantitativamente,
questi eventi provocano dei gaps sensibili e quasi uguali nelle due curve
citate prima, mentre in quella relativa ai ciclisti in moto si notano, ai
minuti 720 e 780 (ore 12:00 e 13:00), solo due lievi incrementi. La
ragione per cui, a tali ore, si sono formati questi due gaps e che lo
59

”spegnimento” di alcuni dei cinque cronotopi, presenti durante i 200
minuti di simulazione, e avvenuto cancellando bruscamente i tempi di
attesa nella posizione in cui si trovavano in molti, i quali si son trovati
immediatamente liberi di muoversi e raggiungere nuove destinazioni.
Viene presentato, in relazione a quest’ultima simulazione, il grafico
della mobilita media in funzione del tempo (cfr. fig. 3.4).
662 702 742 782 822 862
0.00
1.50
minuti
mob
ilita
’ med
ia
Figura 3.4: Mobilita mediata sul numero di individui e sul tempotrascorso dall’inizio della simulazione senza trasporto pubblico.
La mobilita media, in queste simulazioni, non dipende piu dal nu-
mero di autobus presenti ma dallo stato generale delle attrazioni dei
cronotopi, per cui non si fa piu riferimento alla definizione 2.8. La
definizione operativa cui faccio riferimento in queste similazioni e data
da:
< m(t) > =1
Nind(t)
1
t
Nind(t)∑
i=1
∫ t
0
vı(t′)dt′ (3.10)
dove Nind(t) e il numero di individui e vı e la velocita di ciascun
individuo, sia esso ciclista, passeggero o in sosta.
La presenza dei ”treni” (peraltro in numero fisso) fa aumentare,
come banalmente ci si aspettava, il valore di questa grandezza rispetto
60

al caso di assenza e amplifica le variazioni brusche (anche se relativa-
mente piccole) dovute allo spegnimento di alcuni cronotopi (cfr. figure
3.4 e 3.6). Nelle due figure si nota un calo della mobilita nei primi
60 minuti che corrisponde allo stato in cui tutti i cronotopi sono at-
trattivi fino a quando due dei piu forti si spengono: questo fa si che
i pedoni-ciclisti ricomincino a muoversi. La mobilita ha un ulteriore
caduta dopo esser trascorsi altri 60 minuti, momento in cui si spegne
un altro cronotopo, meno attrattivo dei precedenti.
661 728 794 861
0.00
1.00
minuti
perc
entu
ale
Figura 3.5: Frequenze delle popolazioni nel piano urbano con trasportopubblico: in nero quella dei pedoni, in blu quella dei ciclisti, in rossoquella degli utenti ed in verde quella dei pedoni in attesa.
La figura 3.6, di cui abbiamo appena parlato, descrive la mobilita
mediata sul numero di individui presenti, istante per istante, e sugli
intervalli temporali trascorsi dall’inizio della simulazione; essa e in re-
lazione con la figura 3.5 che mette in evidenza gli andamenti, pressoche
regolari, delle quattro variabili globali U(t), W(t), P(t) e C(t) definite
in precedenza. In tale simulazione, il servizio di trasporto pubblico
e attivo e rappresenta grossolanamente quello che ci si puo attendere
dal comportamento reale di queste popolazioni nell’ambito ristretto al
centro storico di Rimini.
61

662 702 742 782 822 862
0.00
1.50
minuti
mob
ilita
’ med
ia
Figura 3.6: Mobilita mediata sul numero di individui e sul tempotrascorso dall’inizio della simulazione con trasporto pubblico.
Un dato su tutti merita un commento. Cio che merita attenzione
in questa simulazione, soprattutto se osserviamo i grafici del capitolo
precedente della frequenza di utenti in simulazioni su citta estese (la
griglia era di 101×101 nodi), e lo scarso utilizzo dei mezzi di trasporto
pubblico: il motivo principale e da ricercare nelle dimensioni esigue
dell’area di Rimini in esame (si pensi che il corso d’Augusto che at-
traversa tutto il centro e lungo 900 metri). Nelle loro valutazioni,
infatti, i pedoni scartano molto spesso la strategia di prendere un
treno per raggiungere un cronotopo a causa dell’alto valore dato al
cammino massimo (cfr. sez. 3.4) che condiziona la scelta di muoversi
a piedi. Infatti, dalle osservazioni fatte sul campo (citta di Rimini)
vi e una conferma al fatto che i frequentatori del centro non pren-
dono l’autobus per muoversi al suo interno ma solo per raggiungere la
periferia o paesi limitrofi. Questo comunque non deve portare alla con-
clusione affrettata che in questo sistema il moto tramite autobus (”la
terza velocita”) sia eliminabile: questi, infatti, svolgono l’importante
funzione di tramite con l’esterno, bilateralmente, e contribuiscono ad
una migliore distribuzione della popolazione in citta. Confortante e il
62

fatto che la percentuale di pedoni in attesa nelle fermate non sia alta:
questo significa che la frequenza e il numero degli autobus e sufficiente.
662 706 750 795 839 883
0
72
143
215
286
358
minuti
n.ro
indi
vidu
i
Figura 3.7: Andamento della popolazione nell’area occupata dal mer-cato della Rocca Malatestiana. In nero e la popolazione di passaggioin quell’area, mentre in rosso quella totale risultante dalla somma dellaprecedente con quella che, interessata alle attivita che vi si svolgono,si ferma.
L’ultimo grafico (cfr. figura 3.7) mostra l’andamento della popo-
lazione nell’area occupata dal mercato della Rocca Malatestiana. Il
cronotopo e attivo, nella prova, da mezzogiorno alle 14:00 p.m. (rispet-
tivamente, sull’asse orizzonale, 720 e 840 I.S.) e attrae un discreto
numero di cittadini. In nero e rappresentata la popolazione di passag-
gio in quell’area, mentre in rosso quella totale risultante dalla somma
della precedente con quella che, interessata alle attivita che vi si svol-
gono, si ferma. La prima, naturalmente, e il risultato della dinamica
complessiva che si sviluppa nel sistema in esame e, di conseguenza,
presenta fluttuazioni difficili da spiegare in quanto effetti della siner-
gia di tutti gli elementi strutturali e dinamici di tale sistema comp-
lesso. La seconda, per definizione sempre maggiore della precedente,
presenta un comportamento del tutto realistico: in particolar modo
63

possiamo capire, osservando il suo profilo tra gli intervalli 705-720, gli
effetti del moto anticipato cui sono dotati pedoni e ciclisti. Alcuni di
loro, infatti, raggiungono il mercato qualche minuto prima della sua
apertura e aspettano, cosicche al tempo di permanenza a cronotopo
attivo si somma quello che spendono, restando in zona, perche arrivati
presto. Questo simula un comportamento umano molto frequente di
questi tempi e cioe quello di raggiungere le aree d’interesse (in partico-
lar modo uffici) prima che queste siano funzionali, con la speranza di
guadagnare tempo e di evitare code. Ma, come si puo ancora osservare
dalla figura 3.7, la concomitanza della presenza di coloro che arrivano
in anticipo e coloro che sono puntuali, cioe che arrivano appena il mer-
cato apre, crea un picco di occupanti molto alto che potrebbe, nel caso
reale, congestionare la viabilita nella suddetta area. Tale congestione
e visibile dalla figura, come anche il suo assestamento a valori medi
di occupazone, rappresentato dallo smorzamento del picco nell’arco
di una cinquantina di minuti. Si noti che in una situazione critica
generata da un elevato numero di interessati e/o da lunghi tempi di
permanenza, tale rilassamento sarebbe stato molto lento e forse in-
sufficiente per evitare una paralisi delle normali relazioni svoltesi in
questo cronotopo.
3.6 Aspetti informatici
Si propone un sistema software (MOBILIS) implementato in codice
C++, in ambiente UNIX, come laboratorio integrato per l’analisi della
mobilita. I vantaggi offerti dal sistema derivano dalla semplicita d’uso
dovuta all’integrazione, in un unico ambiente software, degli strumenti
grafici con quegli analitici.
Tutte le elaborazioni grafiche per l’implementazione della rete viaria
sono state effettuate avendo come base la cartografia di Rimini, in ver-
sione informatizzatafornita dall’architetto M. Zaoli (cfr. figura 3.8).
Tale operazione ha permesso di avere sempre una rappresentazione
strettamente georeferenziata e quindi esente da possibili errori di de-
64
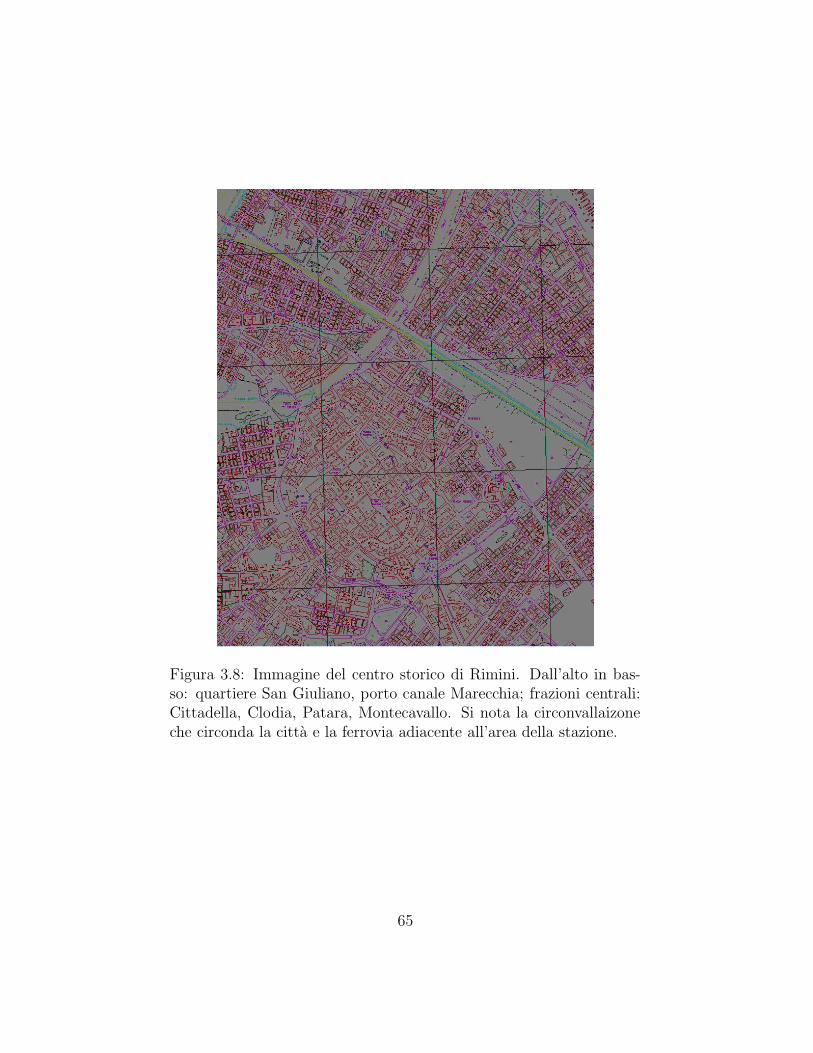
Figura 3.8: Immagine del centro storico di Rimini. Dall’alto in bas-so: quartiere San Giuliano, porto canale Marecchia; frazioni centrali:Cittadella, Clodia, Patara, Montecavallo. Si nota la circonvallaizoneche circonda la citta e la ferrovia adiacente all’area della stazione.
65

Figura 3.9: Immagine del centro storico di Rimini. Colorati sono i nodidalla mappa: la gradazione del colore indica una diversa occupazione;In rosso sono disegnati i cronotopi.
66
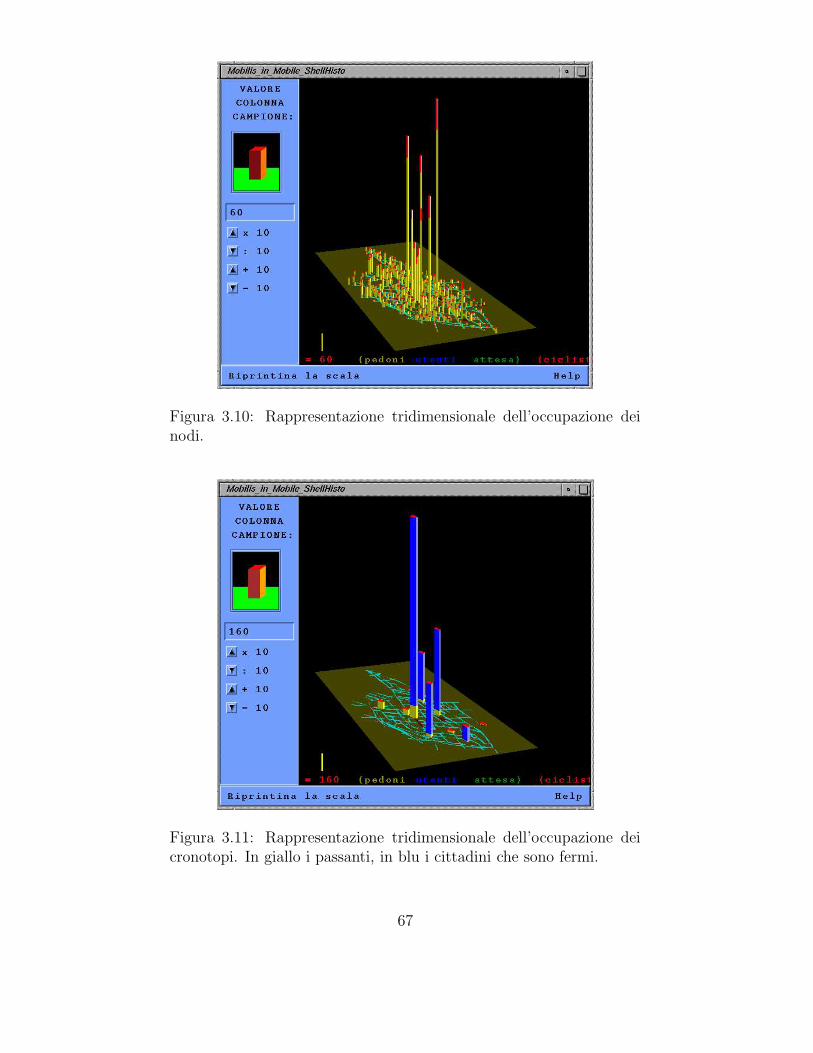
Figura 3.10: Rappresentazione tridimensionale dell’occupazione deinodi.
Figura 3.11: Rappresentazione tridimensionale dell’occupazione deicronotopi. In giallo i passanti, in blu i cittadini che sono fermi.
67

Figura 3.12: Immagine globale di alcune schermate di interazione conl’utente del simulatore. A destra in alto, la finestra per il settaggiodei cronotopi e, a sinistra, quella per la visualizzazione dei valori dellegrandezze piu significative del modello.
68

formazione, scarsa chiarezza e incomprensibilita. Su questa carta in-
formatizzata e stata costruita la rete viaria-pedonale congiungendo gli
incroci stradali con segmenti-”archi” che virtualmente ripropongono
lo scheletro delle strade percorribili dell’area di studio.
Il simulatore si avvale di files preparati ad hoc i quali sono necessari
per:
• riprodurre la topologia urbana, cioe la rete stradale e quella del
trasporto pubblico;
• descrivere i chronotopoi e la loro calendarizzazione, cosiccome
per i topoi ;
• riprodurre il passaggio degli autobus: orari, fermate, linee di
appartenenza;
• seguire un profilo plausibile dei flussi della popolazione tra in-
terno ed esterno dell’area di studio (facoltativo): e possibile,
anche, settarlo interagendo col programma run-time scegliendo i
parametri caratteristici di una delle funzioni analitiche proposte;
L’input o la modifica dei dati si avvale, in parte, anche di relative
finestre: si possono cambiare alcuni parametri run-time, in particolar
modo le caratteristiche di ciascun cronotopo (cfr. figura 3.11) oppure
l’intero scenario della simulazione aggiungendo o togliendo i cronotopi.
Oltre alla quantita di occupanti di ciascun nodo della cartina infor-
matizzata, interpretata tramite relativa legenda e visibile nella finestra
principale (cfr. fig. 3.9), si puo monitorare l’evoluzione delle diverse
popolazioni, l’occupazione dei cronotopi, la situazione alle fermate e
parametri dinamici (per esempio la mobilita) tramite grafici delle fre-
quenze, istogrammi tridimensionali oppure finestre che mostrano i val-
ori numerici delle grandezze piu significative della simulazione istante
per istante (cfr. figure 3.11, 3.12).
Ovviamente i tempi di elaborazione dipendono dalla velocita del
processore in uso e crescono col numero dei pedoni.
69

Conclusioni
In questa ho presentato i metodi di analisi e i modelli piu rilevanti e
che, quindi, possono dare meglio l’idea di quale sia lo stato dell’arte in
questo campo di studio che oltre a interessare diversi campi di ricerca
per la sua attualita, usufruisce in genere delle tecniche informatiche
piu avanzate (una su tutte il GIS: Geographic Information System
che fornisce all’utente, in real-time, un data-base di informazioni geo-
politiche sull’area richiesta, sia essa un quartiere, una citta o una
regione).
L’analisi attuale sviluppata nei lavori dei ricercatori delle scienze
naturali, socio-economiche e urbanistiche e capace di mostrare cambia-
menti nei flussi pedonali solo per variazioni di geometria o collocazione
di intere strade ma non ci sono studi scientifici che contemplino anche
gli aspetti socio-economici tra le cause del moto pedonale. Infatti, fi-
nora, si sono creati simulatori - sia di traffico pedonale che veicolare -
che hanno tenuto conto, in maniera escusiva, o di aspetti di dinamica
microscopica (modelli di idrodinamica) con elementi di caoticita, o di
strutture spaziali dei flussi dovute a spostamenti ”necessari” (modelli
origine-destinazione), o di interazioni tra la psicologia del pedone e
la strada percorsa studiate in spazi ristretti. Il modello cronotopico,
invece, sintetizza molti di questi aspetti concependo la citta come
sistema complesso in cui si sviluppa il movimento che presenta, alle
volte, uno stretto legame con la destinazione da raggiungare oppure
caratteri di impredicibilita tipicamente visibili in aree in cui si svolgono
molte attivita.
Il lavoro fatto consente, effettivamente, di osservare il moto pe-
donale relativo alle diverse configurazioni spaziali, alla gestione del
trasporto pubblico e alla disposizione di attivita in cui si svolgono re-
lazioni di ogni genere. Le potenzialita di descrizione e di previsione del
simulatore sono pronte ad essere verificate con ulteriori confronti con
situazioni reali. Confido che lavorando attentamente sulla calibrazione
70

dei parametri del modello si possano ottenere risultati accurati e credi-
bili tali da poter fare osservazioni ragionevoli sugli spazi urbani, anche
di vasta estensione.
Mi auguro che il contributo dato dalla mia tesi possa fornire uno
strumento dalle caratteristiche originali capace sia di ricreare le di-
namiche interne agli spazi urbani, comprendendone le cause principali,
sia di simulare nuove dinamiche, modificandone l’aspetto. La carat-
teristica principale del mio lavoro e quella di contribuire alle opere di
riqualificazione dei centri urbani che potrebbero essere affrontate con
l’ausilio di uno strumento scientifico che si affiancherebbe all’esperien-
za degli amministratori e alla volonta dei cittadini. Le potenzialita
del modello si manifestano, in particolar modo, in progetti di pianifi-
cazione delle attivita economiche e sociali disposte sul territorio, siano
esse preesistenti o future.
71

Ringraziamenti
Ringrazio enormemente la dottoressa S. Bonfiglioli del Dipartimen-
to di Scienze del Territorio del Politecnico di Milano e il dottor G.
Martinotti del Dipartimento di Sociologia dell’Universita degli Studi di
Milano Bicocca per l’interesse mostrato in questa ricerca, per gli spun-
ti e le critiche che hanno contribuito a rendere il modello pertinente
alle trasformazioni in atto nella societa contemporanea.
Ringrazio con stima il dottor Marco Zaoli, presidente degli ar-
chitetti di Rimini, per la disponibilita e la competenza messa a mia
disposizione durante le visite a Rimini, essendogli debitore di tutti gli
strumenti che mi ha fornito per lo studio della citta.
Voglio, inoltre, ringraziare l’architetto F. Semboloni del Diparti-
mento di Urbanistica e Pianificazione del Territorio dell’Universita di
Firenze per avermi dato utili informazioni sulla attuale situazione di
ricerca nel campo dell’urbanistica con la quale e stato indispensabile
confrontarsi.
Infine sono particolarmente grato ai dottori Giorgio Turchetti, Ar-
mando Bazzani e Bruno Giorgini che, dall’interno del gruppo di ricer-
ca, hanno illuminato il percorso che ho intrapreso e reso stimolante il
lavoro che ho portato avanti.
72

Bibliografia
[1] F. Schweitzer, Self-Organization of Complex Structures: From
Individual to Collective Dynamics, Gordon and Breach, pp. 19-24,
London (1997).
[2] F. Schweitzer, Brownian Agents and Active Particles, Springer,
Berlin, pp.430 (2002).
[3] W. Ebeling e F. Schweitzer,Active Motion in Systems with Energy
Supply in: Integrative Systems Approaches in Natural and Social
Sciences, Springer, Berlin (2001).
[4] N. Ashford, M. O’Leary e P. D. McGinity, Traffic Eng. Control
17, pg. 207 (1976).
[5] M. Batty, Nature, London (1997).
[6] A. Borgers e H. Timmermans, Geograph. Anal. 18, pg. 115
(1986).
[7] A. Borgers e H. Timmermans, Socio-Econ. Plan. Sci. 20, pg. 25
(1986).
[8] R. L. Carstens e S. L. Ring, Traffic Eng. 41, pg. 38 (1970).
[9] J. S. Coleman, Introduction to Mathematical Sociology, (Free,
New York), pg. 361 (1964).
[10] J. S. Coleman e J. James, Sociometry 24, pg. 36 (1961).
[11] J. Ganem, Phys. Teach. 36, pg. 76 (1998).
73

[12] D. Garbrecht, Traffic Q. 27, pg. 89 (1973).
[13] L. A. Goodman, Am. J. Sociol. 70, pg. 170 (1964).
[14] D. Helbing, F. Schweitzer, J. Kelsch e P. Molnar, Physical Review
E 56, pg. 2527 (1997).
[15] L. F. Henderson, Nature (London) 229, pg. 381 (1971)
[16] M. R. Hill, Walking, Crossing Streets, and Choosing Pedestrian
Routes, University of Nebraska, Lincoln (1984).
[17] L. A. Hoel, Traffic Eng. Control 38, pg. 10 (1968).
[18] S. P. Hoogerdoorn, P. H. L. Bovy e W. Daamen, Pedestrian and
Evacuation Dynamics, edito da M. Schreckenberg e S. D. Sharma
(Springer, Berlin), pg. 123 (2001).
[19] J. P. Keating, Fire J. 57, pg. 61 (1982).
[20] A. J. Mayne, Biometrika 41, pg. 375 (1954).
[21] P. D. Navin e R. J. Wheeler, Traffic Eng. Control 39 (1969).
[22] S. J. Older, Traffic Eng. Control 10, pg. 160 (1968).
[23] E. Quarantelli, Sociol. Soc. Res. 41, pg. 187 (1957).
[24] G. H. Ristow e H. J. Herrmann, Physical Review E 50, R5 (1994).
[25] T. Vicsek, Fractal Growth Phenomena, 2nd ed. (World Scientific,
Singapore) (1992).
[26] S. J. Yuhaski, Jr, e J. M. Macgregor Smith, Queueing Syst. 4,
pg. 319 (1989).
[27] D. Helbing e P. Molnar, Social force model for pedestrian
dynamics, Physical Review E (1995).
[28] D. Helbing, Traffic and related self-driven many-particle systems,
Review of Modern Physics (2001).
74

[29] B. Hillier, A Theory of the City as Object, 3rd International Space
Syntax Symposium, Atlanta (2001).
[30] J. Desyllas, E. Duxbury, Measuring and Modelling Pedestrian
Flows in Cities, Planning For Movement, London (2000).
[31] A. Bazzani, B. Giorgini, G. Servizi, G. Turchetti, A Chronotopic
Model of Mobility in Urban Spaces, Bologna 2002.
[32] M. Mareggi, Il tempo e la citta fra natura e storia. Atlante di pro-
getti sui tempi della citta, Urbanistica QUADERNI, INU, Roma
(1997).
[33] L. Brotcorne, D. De Wolf, M. Labbe, A dynamic user equilibri-
um model for traffic assignement in urban areas, prestampa al
http://smg.ulb.ac.be/Preprints.html, (2000).
75
Related Documents











