Decentralized Control Framework and Stability Analysis for Networked Control Systems Ahmed Elmahdi Ph.D. Candidate School of Electrical & Comp. Eng’g Purdue University, West Lafayette, Indiana 47906 Email: [email protected] Ahmad F. Taha Ph.D. Candidate School of Electrical & Comp. Eng’g Purdue University, West Lafayette, Indiana 47906 Email: [email protected] Dengfeng Sun Jitesh H. Panchal Assistant Professor Assistant Professor School of Aeronautics and Astronautics School of Mechanical Engineering Purdue University, Purdue University, West Lafayette, Indiana 47906 West Lafayette, Indiana 47906 Email: [email protected] Email: [email protected] The combination of decentralized control and networked control where control loops are closed through a network is called Decentralized Networked Control System (DNCS). This paper introduces a general framework that con- verts a generic decentralized control configuration of non- networked systems to the general setup of a Networked Con- trol Systems (NCS). Two design methods from the litera- ture of decentralized control for non-networked systems were chosen as a base for the design of a controller for the net- worked systems, the first being an observer-based decentral- ized control, while the second is the well-known Luenberger combined observer-controller design. The main idea of our design is to formulate the DNCS in the general form and then map the resulting system to the general form of the NCS. First, a method for designing decentralized observer-based controller is discussed. Second, an implementation using a network is analyzed for the two designs. Third, two meth- ods to analyze the stability of the DNCS are also introduced. Fourth, perturbation bounds for stability of the DNCS have been derived. Finally, examples and simulation results are shown and discussed. 1 Introduction Decentralized control is used when there is a large scale system (LSS) whose sub-systems have interconnections with existing constraints on data transfer between them. Unlike centralized control, the decentralized control can be robust and scalable especially to the systems that are distributed over a large geographical area. The main feature of decen- tralized control is that it uses only local information to pro- duce control laws [1]. The recent research efforts in the area of control sys- tems have paved the way to better understand and interact with large-scale decentralized modern control systems [4, 6, 23]. To mention a few, large-scale Networked Control Sys- tems (NCS) can be found in many diverse applications, such as: transportation networks, smart-grids, digital communica- tion systems, and robotics. Since communication networks are an essential component of these systems, the analysis of a networked version of decentralized control systems is be- coming crucial. The objective of this paper is to introduce a general framework that converts a generic decentralized con- trol configuration of non-networked systems to the general setup of an NCS. 1.1 Decentralized Control The decentralized control methodology, in many cases, is intended to replace the complex, expensive, and imprac- tical applications of centralized control. A main field of decentralized control is the large-scale interconnected sys- tems. Transportation systems, communication networks, power systems, economic systems, manufacturing processes and many others, are examples where decentralized control is used. The main idea behind designing decentralized con- trollers is the use of local information to achieve global re- sults. In this paper we are considering the observer-based de- centralized control design for large-scale interconnected sys- tems where the feedback loops are closed through a network. The robust design of the decentralized control strategies has been introduced in [4–6]. In [7], the authors proposed an observer-based control algorithm for linear systems where the design uses low-order linear functional observers. The

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Decentralized Control Framework and StabilityAnalysis for Networked Control Systems
Ahmed ElmahdiPh.D. Candidate
School of Electrical & Comp. Eng’gPurdue University,
West Lafayette, Indiana 47906Email: [email protected]
Ahmad F. TahaPh.D. Candidate
School of Electrical & Comp. Eng’gPurdue University,
West Lafayette, Indiana 47906Email: [email protected]
Dengfeng Sun Jitesh H. PanchalAssistant Professor Assistant Professor
School of Aeronautics and Astronautics School of Mechanical EngineeringPurdue University, Purdue University,
West Lafayette, Indiana 47906 West Lafayette, Indiana 47906Email: [email protected] Email: [email protected]
The combination of decentralized control and networkedcontrol where control loops are closed through a networkis called Decentralized Networked Control System (DNCS).This paper introduces a general framework that con-verts a generic decentralized control configuration of non-networked systems to the general setup of a Networked Con-trol Systems (NCS). Two design methods from the litera-ture of decentralized control for non-networked systems werechosen as a base for the design of a controller for the net-worked systems, the first being an observer-based decentral-ized control, while the second is the well-known Luenbergercombined observer-controller design. The main idea of ourdesign is to formulate the DNCS in the general form and thenmap the resulting system to the general form of the NCS.First, a method for designing decentralized observer-basedcontroller is discussed. Second, an implementation using anetwork is analyzed for the two designs. Third, two meth-ods to analyze the stability of the DNCS are also introduced.Fourth, perturbation bounds for stability of the DNCS havebeen derived. Finally, examples and simulation results areshown and discussed.
1 IntroductionDecentralized control is used when there is a large scale
system (LSS) whose sub-systems have interconnections withexisting constraints on data transfer between them. Unlikecentralized control, the decentralized control can be robustand scalable especially to the systems that are distributedover a large geographical area. The main feature of decen-tralized control is that it uses only local information to pro-duce control laws [1].
The recent research efforts in the area of control sys-tems have paved the way to better understand and interactwith large-scale decentralized modern control systems [4, 6,23]. To mention a few, large-scale Networked Control Sys-tems (NCS) can be found in many diverse applications, suchas: transportation networks, smart-grids, digital communica-tion systems, and robotics. Since communication networksare an essential component of these systems, the analysis ofa networked version of decentralized control systems is be-coming crucial. The objective of this paper is to introduce ageneral framework that converts a generic decentralized con-trol configuration of non-networked systems to the generalsetup of an NCS.
1.1 Decentralized ControlThe decentralized control methodology, in many cases,
is intended to replace the complex, expensive, and imprac-tical applications of centralized control. A main field ofdecentralized control is the large-scale interconnected sys-tems. Transportation systems, communication networks,power systems, economic systems, manufacturing processesand many others, are examples where decentralized controlis used. The main idea behind designing decentralized con-trollers is the use of local information to achieve global re-sults.
In this paper we are considering the observer-based de-centralized control design for large-scale interconnected sys-tems where the feedback loops are closed through a network.The robust design of the decentralized control strategies hasbeen introduced in [4–6]. In [7], the authors proposed anobserver-based control algorithm for linear systems wherethe design uses low-order linear functional observers. The

individual subsystem states are estimated in [8, 9] by usingan observer where the separation principal needs informa-tion exchange between subsystems in order to be utilized.Observer-based control design for non-linear systems is in-troduced in [10–13]. The key feature of the design proposedin [10] is that the separation principle of the linear systemscase holds in their design for the non-linear system.
1.2 Networked Control SystemsThe digital and computation progress spur the develop-
ment of distributed control systems. These modern systemswhich include sensors and actuators that are controlled via acentralized or decentralized controllers, are connected by us-ing a shared communication medium. This type of real-timenetworks are called networked control systems (NCS) [14].
NCS applications can be found in passenger cars, trucksand buses, aircraft and aerospace electronics, factory au-tomation, industrial machine control, medical equipment,mobile sensor networks and many more [17]. Howeverthe NCS can potentially increase system reliability, reduceweight, space, power and wiring requirements, there are con-straints that limit the applications. Generally, these limita-tions arise from multiple-packet transmission, data packetdropouts and finite bandwidth that is, only one node canaccess the shared medium at a time. Conventional controltheories having ideal assumptions, such as synchronizationof the control or non-delayed sensing and actuation, have tobe reevaluated to take the network effects in account beforethey are applied to NCS. Basically, the primary objective ofNCS analysis and design is to efficiently use the finite buscapacity while maintaining good closed-loop control systemperformance [16].
1.3 Decentralized Networked Control SystemsIt is noteworthy to mention that NCSs and decentral-
ized control applications do often overlap, which adds to thesignificance of studying and analyzing Decentralized Net-worked Control Systems (DNCS). Generally, decentralizedcontrol is used when there is a large scale system (LSS)whose sub-systems have interconnections with existing con-straints on data transfer between them. The problem of de-centralized control can be viewed as designing local con-trollers for subsystems comprising a given system. Unlikecentralized control, the decentralized control can be robustand scalable. The main feature of decentralized control isthat it uses only local information to produce control laws.
It is very common to see systems which include sensors,actuators and controllers are connected through a sharedcommunication medium. Some advantages of connectingthe system components via network compared to traditionalpoint-to-point control systems are modularity, flexibility ofthe system design, and simplicity of implementation such asreduced system wiring and configuration tools. Consideringthe benefits of decentralized control and the fact that moderncontrol systems are increasingly becoming networked con-trol systems, the area of DNCS has recently emerged.
Figure 1 shows the overall structure of a DNCS model.
In this system example, we have three dynamical systemsmodeling the plant behavior:
xxxi = fff i(xxxi,uuui,wwwi, t)
yyyi = hhhi(xxxi,uuui,wwwi, t), ∀i = 1,2,3,
and N controller dynamical systems:
zzzi = gggi(zzzi,rrri,vvvi, t),
pppi = qqqi(zzzi,rrri,vvvi, t), ∀i = 1, . . . ,N,
where xxxi and zzzi are the states of the plant and controller,uuui,rrri are the plant and controllers’ inputs, wwwi and vvvi arethe possible disturbances, noises, or attacks against the sys-tem. Sensors (s( j)
i ) and actuators (α( j)i ) form networks that
are inherently connected to the plant. Through sensors, theplants’ outputs are sent to the controllers via the network,and the controllers’ commands are sent back to the actuators,through the network as well.
1.4 Research Gaps, Paper Preliminaries, Contributionsand Organization
As mentioned in the abstract and introduction, the ob-jective of this paper is to introduce a general frameowrkthat converts a generic decentralized control configurationof non-networked systems to the general setup of an NCS.To our knowledge, there is no similar framework in the re-cent DNCS literature to the one we are proposing. In thispaper, we are addressing this research gap with the formu-lation of the framework. In order to introduce the proposedframework, a decentralized control design scheme of non-networked systems is chosen. We consider the observer-based control design in [7]. The authors considered the casewhen there is no communication network between the sys-tem’s components. In this paper, we analyze the case wherethe control loops of the conventional decentralized controlledsystem are closed through a network. We adopt a design ofthe observed-based controller for the DNCS and then ana-lyze the stability of the networked closed loop system. Twoapproaches to model the network effect are chosen to ana-lyze the stability of the DNCS. Furthermore, the proposedframework addresses the linearized or the linear representa-tion of the plant. If the plant dynamics are non-linear butlinearizable, the framework proposed would be valid. If theplant can’t be linearized, other methods should developed fornonlinear decentralized NCSs.
The contributions in the paper are as follows:
1. Development of a general framework that convertsa generic decentralized control configuration of non-networked systems to the general setup of NCS
2. Applying the general framework for two different de-signs of decentralized control
3. Analysis of the closed-loop system stability of theDNCS through two approaches for the two designs
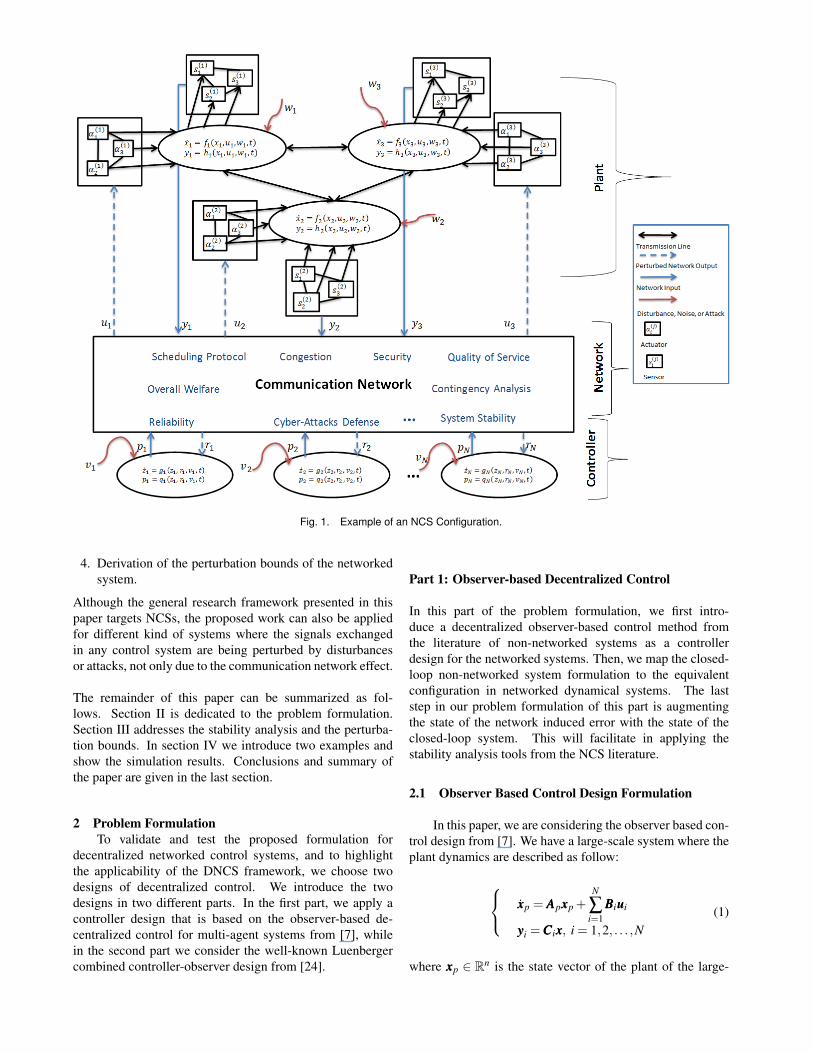
Fig. 1. Example of an NCS Configuration.
4. Derivation of the perturbation bounds of the networkedsystem.
Although the general research framework presented in thispaper targets NCSs, the proposed work can also be appliedfor different kind of systems where the signals exchangedin any control system are being perturbed by disturbancesor attacks, not only due to the communication network effect.
The remainder of this paper can be summarized as fol-lows. Section II is dedicated to the problem formulation.Section III addresses the stability analysis and the perturba-tion bounds. In section IV we introduce two examples andshow the simulation results. Conclusions and summary ofthe paper are given in the last section.
2 Problem FormulationTo validate and test the proposed formulation for
decentralized networked control systems, and to highlightthe applicability of the DNCS framework, we choose twodesigns of decentralized control. We introduce the twodesigns in two different parts. In the first part, we apply acontroller design that is based on the observer-based de-centralized control for multi-agent systems from [7], whilein the second part we consider the well-known Luenbergercombined controller-observer design from [24].
Part 1: Observer-based Decentralized Control
In this part of the problem formulation, we first intro-duce a decentralized observer-based control method fromthe literature of non-networked systems as a controllerdesign for the networked systems. Then, we map the closed-loop non-networked system formulation to the equivalentconfiguration in networked dynamical systems. The laststep in our problem formulation of this part is augmentingthe state of the network induced error with the state of theclosed-loop system. This will facilitate in applying thestability analysis tools from the NCS literature.
2.1 Observer Based Control Design Formulation
In this paper, we are considering the observer based con-trol design from [7]. We have a large-scale system where theplant dynamics are described as follow:
xxxp = AAApxxxp +N
∑i=1
BBBiuuui
yyyi =CCCixxx, i = 1,2, . . . ,N(1)
where xxxp ∈ Rn is the state vector of the plant of the large-

scale system, uuui ∈Rmi is the input vector of the ith subsystemand yyyi ∈ Rpi is the output vector of the ith subsystem. AAAp ∈Rn×n,BBBi ∈ Rn×mi ,CCCi ∈ Rpi×n are all real constant matricesand N is the number of subsystems. Let
{uuu =
[uuu>1 . . . uuu>N
]> , yyy =[yyy>1 . . . yyy>N
]>BBBp =
[BBB1 . . . BBBN
], CCCp =
[CCC>1 . . . CCC>N
]>.
Then the plant can be written in the following compact form:
xxxp = AAApxxxp +BBBpuuup
yyy = CCCpxxxp.
We assume the following as in [7]:
Assumption 1. The triplet (AAAp,BBBp,CCCp) is controllableand observable.
Assumption 2. The triplets (AAAp,BBBi,CCCi) are stable if thereexist decentralized fixed modes that are associated with thetriplets.
Assumption 3. There exists a complete decentralizedstructure of the information of each subsystem (i.e., only thelocal output and control law of each subsystem are avail-able).
Assumption 4. Global state feedback control exists suchthat uuu =−FFFxxx, where FFF ∈ Rm×n.
The global state feedback control gain FFF can be obtained byusing any standard state feedback control method. Partition-ing the global controller uuu, we get,
uuu1uuu2...
uuuN
=−
FFF1FFF2...
FFFN
xxx.
In [7], the authors proposed the following decentralized con-troller:
uuui =−FFF ixxx≈−(KKKiLLLi +WWW iCCCi)xxx≈−KKKizzzi−WWW iyyyi,
where zzzi ∈ Roi is an estimate of the weighted plant state (zzzitracks LLLixxx) that has the following dynamics:
zzzi = EEE izzzi +LLLiBBBiuuui +GGGiyyyi, (2)
where
EEE i ∈ Roi×oi ,LLLi ∈ Roi×n,KKKi ∈ Rmi×oi ,WWW i ∈ Rmi×pi
and GGGi ∈ Roi×pi
are real matrices that represent the controller design parame-ters [7], and
FFF i ≈ KKKiLLLi +WWW iCCCi. (3)
The observation error vector is defined as:
eeeoi = zzzi−LLLixxx, i = 1,2, . . . ,N.
Therefore, the observation error dynamics are:
eeeoi = zzzi−LLLixxx.
After some simple manipulations, we obtain the followingequation:
eeeoi= EEE ieeeoi +(GGGiCCCi−LLLiAAA+EEE iLLLi)xxx−LLLiBBBriuuur. (4)
BBBri is a partition of BBB, BBB =[BBBi BBBri
], where BBBri ∈ Rn×(m−mi)
is the input matrix for uuur(t) which contains (N − 1) inputvectors of the remaining (N−1) subsystems. With this par-ticular partition of the input matrix B, the dynamics of theplant states are:
xxx = AAAxxx+BBBiuuui +BBBriuuur, i = 1,2, . . . ,N.
Choosing EEE i to be asymptotically stable, (2) can be viewedas a decentralized linear observer if LLLi and GGGi fulfill the fol-lowing set of constraints:
LLLiBBBri = O (5)KKKiLLLi +WWW iCCCi = FFF i (6)
GGGiCCCi−LLLiAAA+EEE iLLLi = O , (7)
To compute the four unknowns (KKKi,LLLi,WWW i,GGGi), we are usinga simpler approach other than the one proposed in [7]. Ourapproach is as follows. From (5), we can find Li:
LLLi =(
Null(BBB>ri))>
.
where(
Null(BBB>ri))
is a basis for the null space of BBB>ri. Note
that LLLi is not unique. To find KKKi,WWW i,GGGi we use the Kroneckerproduct properties. From (6), we get:
(LLL>i ⊗ IIImi)vec(KKKi)+(CCC>i ⊗ IIImi)vec(WWW i) = vec(FFF i),

then,
[LLL>i ⊗ IIImi CCC>i ⊗ IIImi
][vec(KKKi)vec(WWW i)
]= vec(FFF i). (8)
Since we chose EEE i and computed LLLi, (7) has only one un-known which is GGGi. Let LLLiAAA−EEE iLLLi =VVV i. Now we have
GGGiCCCi =VVV i.
Using the Kronecker product properties again we get:
(CCC>i ⊗ IIIoi
)vec(GGGi) = vec(VVV i). (9)
Combining (8) and (9), we get:
[LLL>i ⊗ IIImi CCC>i ⊗ IIImi O
O O CCC>i ⊗ IIIoi
]︸ ︷︷ ︸
ΨΨΨ
vec(KKKi)vec(WWW i)vec(GGGi)
(10)
=
[vec(FFF i)vec(VVV i)
].
Solving (10), we get:
vec(KKKi)vec(WWW i)vec(GGGi)
= ΨΨΨ†[
vec(FFF i)vec(VVV i)
],
where ΨΨΨ† is the pseudo-inverse for ΨΨΨ.
After solving for the system design unknowns, we nowhave all the design parameters. Figure 2 shows the large-scale closed-loop system where the observer-based controldesign is applied in the feedback loops of each subsystem.
2.2 Mapping the DNCS to the NCS SetupThe general setup of a DNCS is shown in Figure 3. The
state-space representation for the plant is:
{xxxp = AAApxxxp +BBBpuuuyyy =CCCpxxxp +DDDpuuu, (11)
where AAAp and DDDp are system parameters defined for the over-all plant dynamics (as in Section 2.1) and
{BBBp =
[BBB1. . .BBBN
], CCCp =
[CCC>1 . . . CCC>N
]>yyy =
[yyy>1 . . . yyy>N
]> , uuu =[uuu>1 . . . uuu>N
]>,
Fig. 2. Observer-Based Control Design Scheme.
where
BBBp ∈ Rn×N·mi , CCCp ∈ RN·pi×n, DDDp ∈ RN·pi×N·mi .
The controller state-space representation is given by:
{xxxc = AAAcxxxc +BBBcyyyuuu =CCCcxxxc +DDDcyyy, (12)
where AAAc and DDDc are system parameters defined for the con-troller dynamics (to be defined later) and
{BBBc =
[BBB1. . .BBBN
], CCCc =
[CCC>1 . . . CCC>N
]>uuu =
[uuu>1 . . . uuu>N
]> , yyy =[yyy>1 . . . yyy>N
]>,
where
BBBc ∈ RN·oi×N·pi , CCCc ∈ RN·mi×N·oi ,DDDc ∈ RN·mi×N·pi .
In this paper, and without loss of generality, we assume thatoi = o, mi = m and pi = p (i.e., the subsystems have thesame observer size and similar system structure in terms ofthe dimension of the inputs and outputs).
To analyze the stability of the overall system under theproposed observer-based decentralized control design, weconvert the DNCS setup to the general setup of the NCS,as shown in Figure 4. The delayed versions of uuu and yyy aredefined as: uuu = uuu− eeenu and yyy = yyy− eeeny, where eeenu and eeenyare the delay error due to the presence of the network.
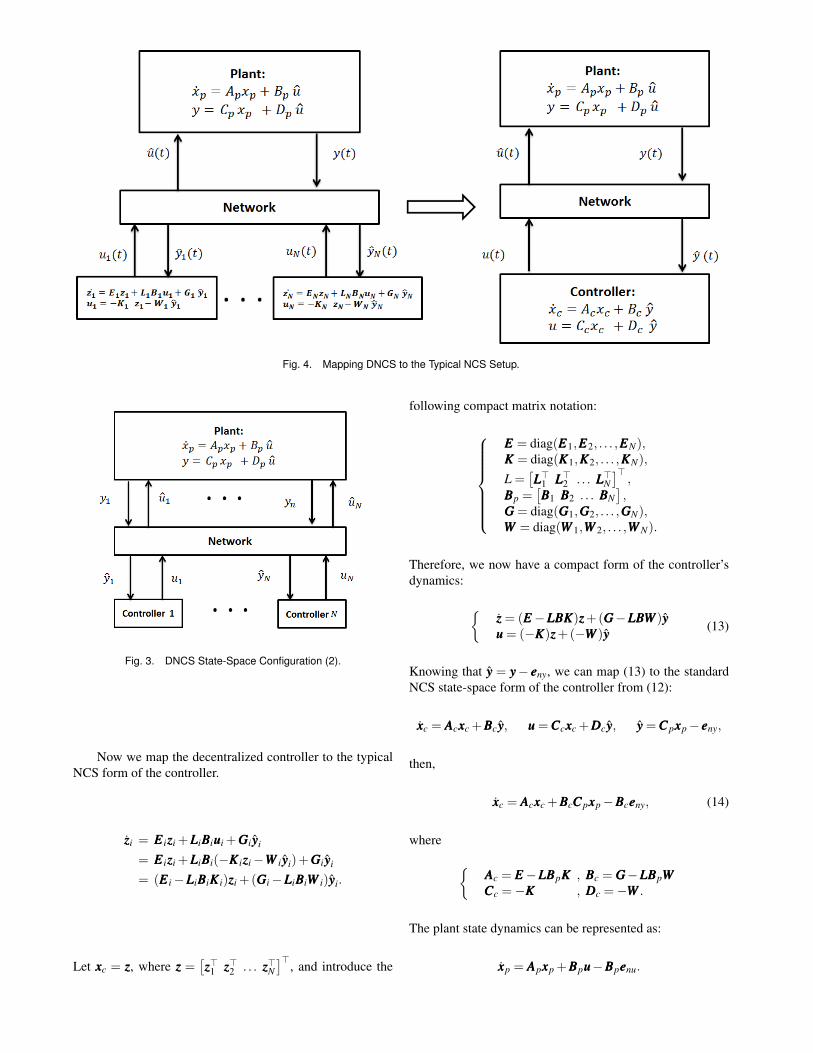
Fig. 4. Mapping DNCS to the Typical NCS Setup.
Fig. 3. DNCS State-Space Configuration (2).
Now we map the decentralized controller to the typicalNCS form of the controller.
zzzi = EEE izzzi +LLLiBBBiuuui +GGGiyyyi
= EEE izzzi +LLLiBBBi(−KKKizzzi−WWW iyyyi)+GGGiyyyi
= (EEE i−LLLiBBBiKKKi)zzzi +(GGGi−LLLiBBBiWWW i)yyyi.
Let xxxc = zzz, where zzz =[zzz>1 zzz>2 . . . zzz>N
]>, and introduce the
following compact matrix notation:
EEE = diag(EEE1,EEE2, . . . ,EEEN),KKK = diag(KKK1,KKK2, . . . ,KKKN),
L =[LLL>1 LLL>2 . . . LLL>N
]>,
BBBp =[BBB1 BBB2 . . . BBBN
],
GGG = diag(GGG1,GGG2, . . . ,GGGN),WWW = diag(WWW 1,WWW 2, . . . ,WWW N).
Therefore, we now have a compact form of the controller’sdynamics:
{zzz = (EEE−LLLBBBKKK)zzz+(GGG−LLLBBBWWW )yyyuuu = (−KKK)zzz+(−WWW )yyy (13)
Knowing that yyy = yyy− eeeny, we can map (13) to the standardNCS state-space form of the controller from (12):
xxxc = AAAcxxxc +BBBcyyy, uuu =CCCcxxxc +DDDcyyy, yyy =CCCpxxxp− eeeny,
then,
xxxc = AAAcxxxc +BBBcCCCpxxxp−BBBceeeny, (14)
where {AAAc = EEE−LLLBBBpKKK , BBBc = GGG−LLLBBBpWWWCCCc =−KKK , DDDc =−WWW .
The plant state dynamics can be represented as:
xxxp = AAApxxxp +BBBpuuu−BBBpeeenu.
The controller’s output uuu can be written as:
uuu = −KKKzzz−WWWyyy
= −KKKxxxc−WWW (yyy− eeeny)
= −KKKxxxc−WWWCCCpxxxp +WWWeeeny.
Recall that uuu = uuu− eeenu and by substituting uuu in the plantstate-space dynamics equation, we get:
xxxp = (AAAp−BBBpWWWCCCp)xxxp−BBBpKKKxxxc +BBBpWWWeeeny−BBBpeeenu. (15)
2.3 Network Effect Augmentation with the System’sStates.
In this section we first find the dynamics of the network-induced error. After finding an expression for the networked-induced error, we then augment the error dynamics withthe general state of the closed-loop system. The network-
induced error is defined as: eeen =[eee>ny eee>nu
]>. Note that in
our system DDDp = O, thus yyy =CCCpxxxp. Recall that yyy = yyy− eeeny.In addition,
uuu =CCCcxxxc +DDDcyyy. (16)
The networked-induced error can be written as:
eeen =
[eeeny
eeenu
]=
[yyy− yyyuuu− uuu
]=
[CCCpxxxp− yyy
CCCcxxxc +DDDcyyy− uuu
].
Note that yyy and uuu are both piece-wise constant functions,thus: ˙yyy = 0, and ˙uuu = 0 as assumed in previous work in theNCS literature [25]. This assumption is valid since the trans-mitted signals are sent through a digital communication net-work. Then,
eeen==
[CCCpxxxpCCCcxxxc
]=
[CCCpAAApxxxp +CCCpBBBpuuu−CCCpBBBpeeenu
CCCcAAAcxxxc +CCCcBBBcCCCpxxxp−CCCcBBBceeeny
].
Substituting (16) into the error dynamics we have (17).Let xxx be the overall state of the closed loop system:
xxx =[xxx>p xxx>c
]>. Let www be the general state vector that in-
cludes the network-induced error vector: www =[xxx> eee>n
]>.From (14)-(17), we can formulate the general state dynamicsof the system as in (18).
Equation (18) combines the nominal closed-loop systemand the perturbation that represents the network effect.
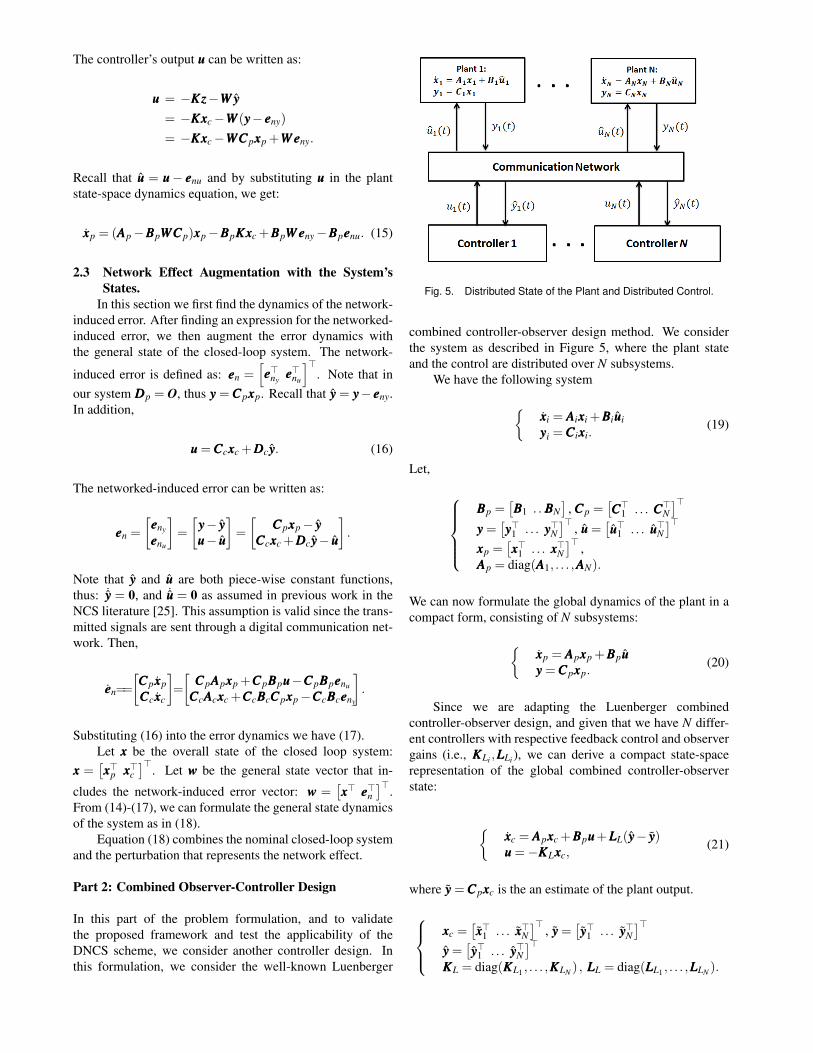
Part 2: Combined Observer-Controller Design
In this part of the problem formulation, and to validatethe proposed framework and test the applicability of theDNCS scheme, we consider another controller design. Inthis formulation, we consider the well-known Luenberger
Fig. 5. Distributed State of the Plant and Distributed Control.
combined controller-observer design method. We considerthe system as described in Figure 5, where the plant stateand the control are distributed over N subsystems.
We have the following system
{xxxi = AAAixxxi +BBBiuuuiyyyi =CCCixxxi.
(19)
Let,
BBBp =
[BBB1 . . .BBBN
], CCCp =
[CCC>1 . . . CCC>N
]>yyy =
[yyy>1 . . . yyy>N
]> , uuu =[uuu>1 . . . uuu>N
]>xxxp =
[xxx>1 . . . xxx>N
]> ,AAAp = diag(AAA1, . . . ,AAAN).
We can now formulate the global dynamics of the plant in acompact form, consisting of N subsystems:
{xxxp = AAApxxxp +BBBpuuuyyy =CCCpxxxp.
(20)
Since we are adapting the Luenberger combinedcontroller-observer design, and given that we have N differ-ent controllers with respective feedback control and observergains (i.e., KKKLi ,LLLLi ), we can derive a compact state-spacerepresentation of the global combined controller-observerstate:
{xxxc = AAApxxxc +BBBpuuu+LLLL(yyy− yyy)uuu =−KKKLxxxc,
(21)
where yyy =CCCpxxxc is the an estimate of the plant output.
xxxc =
[xxx>1 . . . xxx>N
]> , yyy =[yyy>1 . . . yyy>N
]>yyy =
[yyy>1 . . . yyy>N
]>KKKL = diag(KKKL1 , . . . ,KKKLN ) , LLLL = diag(LLLL1 , . . . ,LLLLN ).

eeen =
[(CCCpAAAp +CCCpBBBpDDDcCCCp)xxxp +CCCpBBBpCCCcxxxc−CCCpBBBpDDDceeeny −CCCpBBBpeeenu
CCCcBBBcCCCpxxxp +CCCcAAAcxxxc−CCCcBBBceeeny
]. (17)
xxxpxxxceeenyeeenu
=
AAAp +BBBpDDDcCCCp BBBpCCCc −BBBpDDDc −BBBp
BBBcCCCp AAAc −BBBc O(CCCpAAAp +CCCpBBBpDDDcCCCp) CCCpBBBpCCCc −CCCpBBBpDDDc −CCCpBBBp
CCCcBBBcCCCp CCCcAAAc −CCCcBBBc O
︸ ︷︷ ︸
AAA
xxxpxxxceeenyeeenu
. (18)
Writing the estimated output in a compact form, and withsimple manipulations to the combined controller-observersystem dynamics equation, we can write a standard compactform for the controller of the networked closed-loop system:
{xxxc = AAAcxxxc +BBBcyyyuuu =CCCcxxxc,
(22)
where
AAAc = AAAp−BBBpKKKL−LLLLCCCp, BBBc = LLLL,CCCc =−KKKL. (23)
Recall that yyy = yyy− eeeny = CCCpxxxp − eeeny and uuu = uuu− eeenu =−KKKLxxxc− eeenu . Hence, substituting the terms in (22) and theprevious two equations, in (20) and (21), we get:
xxxp = AAApxxxp +BBBpCCCcxxxc−BBBpeeenu , (24)
and
xxxc = BBBcCCCpxxxp +AAAcxxxc−BBBceeeny . (25)
Recall that the networked-induced error dynamics is definedas:
eeen =
[eeeny
eeenu
]=
[yyy− yyyuuu− uuu
]=
[CCCpxxxp− yyyCCCcxxxc− uuu
].
Since yyy and uuu are both piece-wise constant functions,thus: ˙yyy = 0, and ˙uuu = 0. Then,
eeen==
[CCCpxxxpCCCcxxxc
]=
[CCCpAAApxxxp +CCCpBBBpCCCcxxxc−CCCpBBBpeeenu
CCCcBBBcCCCpxxxp +CCCcAAAcxxxc−CCCcBBBceeeny
]. (26)
Following the same methodology for the observer-baseddecentralized control in Part 1, we can augment the gen-eral state dynamics of the Luenberger combined controller-observer design, in addition to the networked-induced errorstate:
xxxpxxxceeeny
eeenu
=
AAAp BBBpCCCc O −BBBpBBBcCCCp AAAc −BBBc OCCCpAAAp CCCpBBBpCCCc O −CCCpBBBp
CCCcBBBcCCCp CCCcAAAc −CCCcBBBc O
︸ ︷︷ ︸
AAA
xxxpxxxceeeny
eeenu
. (27)
Equation (27) combines the nominal closed-loop system andthe perturbation that represents the network effect for the Lu-enberger combined controller-observer design.
3 Stability AnalysisIn this section, we analyze the stability of the DNCS. To
analyze the stability of the system, we consider two differentapproaches. In the two approaches, we separate the nomi-nal system and the perturbation using two different methods.This is followed by deriving perturbation bounds for bothmethods.
3.1 First Approach: Extracting Perturbation Elementsin AAA
Let xxx be the overall state of the closed loop system:xxx= [xxx>p xxx>c ]
>. Let www be the general state vector that augmentsthe state of closed-loop system and the network-induced er-ror vector. Hence, www = [xxx> eee>n ]
>. Based on the general statedynamics in (18) and (27), the nominal closed-loop systemcan be found when the network effect is null. Therefore, wecan separate the nominal system and the perturbation in (18)and (27) and derive the following perturbation-separated rep-resentations.
The observer-based decentralized control can be writtenas in the following perturbation-separated formulation (28),whereas the combined Luenberger observer-controller de-sign can be formulated as in (29), where SSS represents thedynamics of the nominal closed-loop system and ∆SSS repre-sents the perturbation in the system dynamics. For stabilityanalysis purposes, we introduce the matrix ∆CCC which is usedto guarantee that (SSS+∆CCC) is Hurwitz. We can now write the

www =
xxxpxxxceeeny
eeenu
=
AAAp +BBBpDDDcCCCp BBBpCCCc O O
BBBcCCCp AAAc O OO O O OO O O O
︸ ︷︷ ︸
SSS
+∆CCC
xxxpxxxceeeny
eeenu
+
O O −BBBpDDDc −BBBpO O −BBBc O
(CCCpAAAp +CCCpBBBpDDDcCCCp) CCCpBBBpCCCc −CCCpBBBpDDDc −CCCpBBBpCCCcBBBcCCCp CCCcAAAc −CCCcBBBc O
︸ ︷︷ ︸
∆SSS
−∆CCC
xxxpxxxceeeny
eeenu
. (28)
www =
xxxpxxxceeeny
eeenu
=
AAAp BBBpCCCc O O
BBBcCCCp AAAc O OO O O OO O O O
︸ ︷︷ ︸
SSS
+∆CCC
xxxpxxxceeeny
eeenu
+
O O O −BBBpO O −BBBc O
CCCpAAAp CCCpBBBpCCCc O −CCCpBBBpCCCcBBBcCCCp CCCcAAAc −CCCcBBBc O
︸ ︷︷ ︸
∆SSS
−∆CCC
xxxpxxxceeeny
eeenu
. (29)
general system dynamics as:
www = (SSS+∆CCC)www+(∆SSS−∆CCC)www = SSScwww+∆SSScwww. (30)
Theorem 1. For the DNCS in (11) and (12) and for anyQQQ=QQQ> �O, if the solution to the Lyapunov matrix equation
SSS>c PPP+PPPSSS>c =−2QQQ,
is PPP = PPP> � O, and if the norm of the perturbation ma-trix (∆SSSc) is upper bounded by:
‖∆SSSc‖ ≤λmin (QQQ)
λmax (PPP),
where ‖ · ‖ is the matrix induced norm, then the DNCS isglobally asymptotically stable.
Proof. Since SSSc is stable, then for any symmetric positivedefinite QQQ, the solution to the Lyapunov matrix equation:
SSS>c PPP+PPPSSS>c =−2QQQ
is symmetric positive definite. Using the following candidateLyapunov function, V = 1
2 www>PPPwww. Then,
V = www>PPPwww = www>PPPSSScwww+www>PPP∆SSScwww.
Notice that
www>PPPSSScwww =12
www>SSS>c PPPwww+12
www>PPPSSScwww
=12
www>(
SSS>c PPP+PPPSSSc
)www =−www>QQQwww
In addition, for any matrix induced norm ‖ · ‖ we have:
www>PPP∆SSScwww ≤ ‖PPP∆SSSc‖‖www‖2 = ‖PPP‖‖∆SSSc‖‖www‖2
= λmax(PPP)‖∆SSSc‖‖www‖2.
In addition, for any symmetric matrix QQQ, Raleigh’s inequalityholds:
−λmax(QQQ)‖www‖22 ≤−www>QQQwww≤−λmin(QQQ)‖www‖2
2.

Hence,
V ≤ −λmin(QQQ)‖www‖22 +λmax (PPP)‖∆SSSc‖‖www‖2
= −(λmin (QQQ)−λmax (PPP)‖∆SSSc‖)‖www‖2.
For a valid Lyapunov candidate function, we should haveV < 0, thus:
‖∆SSSc‖≤λmin (QQQ)
λmax (PPP).
3.2 Second Approach: Partitioning AAAIn this approach we partition the augmented states
in (18) as follows:
www(t) = AAAwww(t) =[
AAA11 AAA12AAA21 AAA22
]www(t).
The state dynamics of the networked closed-loop systemcan be represented as: xxx(t) = AAA11xxx(t)+AAA12eeen(t), where
AAA11 =
[AAAp +BBBpDDDcCCCp BBBpCCCc
BBBcCCCp AAAc
],
and
AAA12 =
[−BBBpDDDc −BBBp−BBBc O
].
Consider the time interval between transmissions: t ∈[ti, ti+1] where i = 0,1,2, . . ., we get:
yyy(t) = yyy(ti) =CCCpxxxp(ti)
and
uuu(t) = uuu(ti) =CCCcxxxc(ti)+DDDcy(ti) =CCCcxxxc(ti)+DDDcCCCpxxxp(ti).
Let ggg(t,xxx) = AAA12eeen(t), then the system dynamics equationcan be written as:
xxx(t) = AAA11xxx(t)+ggg(t,xxx), (31)
where ggg(t,xxx) is the perturbation caused by the network. Leteeex(t) = xxx(t)− xxx(ti), then we can write the perturbation termas:
ggg(t,xxx) = AAA12eeen(t) = AAA12
[CCCp O
DDDcCCCp CCCc
]︸ ︷︷ ︸
DDD
[xxx(t)− xxx(ti)
]= DDD
[xxx(t)− xxx(ti)
]= DDDeeex(t),
where
AAA11 ∈ R(n+N·o)×(n+N·o), AAA12 ∈ R(n+N·o)×(N·p+N·m),
DDD ∈ R(n+N·o)×(n+N·o).
Since the non-networked system is stable, then there exists amatrix PPP = PPP> � O such that the solution to the Lyapunovmatrix equation:
AAA>11PPP+PPPAAA11 =−QQQ
is symmetric positive definite (PPP = PPP> � O). Let λ1 =λmin(PPP) and λ2 = λmax(PPP). In [22], Zhang et al. mentionedthat an NCS is stable if the maximum allowable transfer in-terval (MATI) τm is upper bounded by:
τm <λmin(QQQ)
16λ2
√λ2λ1‖AAA‖2
(1+√
λ2λ1
)h(h+1)
2
,
where h is the number of sensor nodes connected to theNCS [22]. Based on this τm upper bound and treating ggg(t,xxx)as a vanishing perturbation as in [20], we can introduce abound to the perturbation that guarantees the stability ofDNCS.
Theorem 2. For the perturbed general state of the systemin (30), if the origin is a globally exponentially stable pointof the non-networked system, and if τm satisfies:
1−||DDD|| ||AAA11 +DDD||−1(e||AAA11+DDD||τm −1)> 0,
and the perturbation is upper bounded by
||eeex(t)|| ≤ γ||xxx(t)||,
where
γ =||AAA11|| ||AAA11 +DDD||−1(e||AAA11+DDD||τm −1)e||AAA11+DDD||τm
1−||DDD|| ||AAA11 +DDD||−1(e||AAA11+DDD||τm −1),
then the origin is a globally exponentially stable equilibriumpoint of the DNCS.
Proof. The proof of the above theorem is very similar to theproof of Walsh et al. in [18].

Fig. 6. The Network Effect Modeled as Pure Time Delay.
4 Simulation ResultsThis section is dedicated to discuss our results from sim-
ulating the behavior of the proposed design of the DNCS. Wefirst discuss two methods that we used to find a bound for themaximum allowable transfer interval τm. The first methodconsiders the network effect as a perturbation as in Theo-rems 1 and 2. We used the MATI bound for the computationof the sufficiency condition of stability to the DNCS. Thisbound is used for stability analysis in general NCS systems.From the simulation results, we note that it is very conserva-tive bound for a sufficiency condition of stability.
In the second method we used a less conservative boundfrom the literature. In [19], they derive the MATI bound bytreating the network effect as a pure time delay. Figure 6shows a high level description for a network modeled as atime delay.
With this modeling, the plant and controller dynamicscan be rewritten as:
xxxc(t) = AAAcxxxc(t)+BBBcCCCpxxxp(t− τsc)
xxxp(t) = AAApxxxp(t)+BBBpDDDcCCCpxxxp(t− τsc− τca)
+BBBpCCCcxxxc(t− τca).
The main idea behind finding a bound on the maximum al-lowable transfer interval (MATI) or τm is to model the de-layed state as a Taylor series expansion:
xxx(t− τ) =∞
∑k=0
(−1)k τk
k!xxx(k)(t).
In [19], they applied the following approximation:
xxx(t− τ)≈ xxx(t)− τxxx(t),
which leads to a significantly less conservative bound on τmas follows:
τm <1
‖BBBp[WWWCCCp ,KKK]‖. (32)
4.1 Numerical ExampleIn this section we introduce three numerical examples to
analyze the behavior of the proposed design of the observer-based controller and the Luenberger combined observer-controller for the DNCS. We also discuss the perturbationbounds that we derived in Theorems 1 and 2.
4.1.1 Example 1 – Observer-Based Decentralized Con-trol of Mobile Robot
The following system appears in [21]:
AAA =
0 0 0 00 0 0 00 0 0 02 2 0 0
,BBB1 =
0 10 01 0.20 0.5
,
BBB2 =
0 00 1−1 −20 0.5
,CCC1 =
1 0 0 00 0 1 00 0 0 1
,
CCC2 =
0 1 0 00 0 1 00 0 0 1
.It is an unstable system with two controllers. In the con-
troller design, only the local information are available. Com-puting the design parameters, we get the following decentral-ized control laws:
uuu1 =−[
0.022 −2.5870.896 −2.326
]zzz1−
[0.032 0.822 1.8011.280 0.303 2.557
]yyy1,
uuu2 =−[−0.271 0.3070.106 −1.467
]zzz2−
[−0.543 −0.822 −0.2771.072 −0.744 1.641
]yyy2.
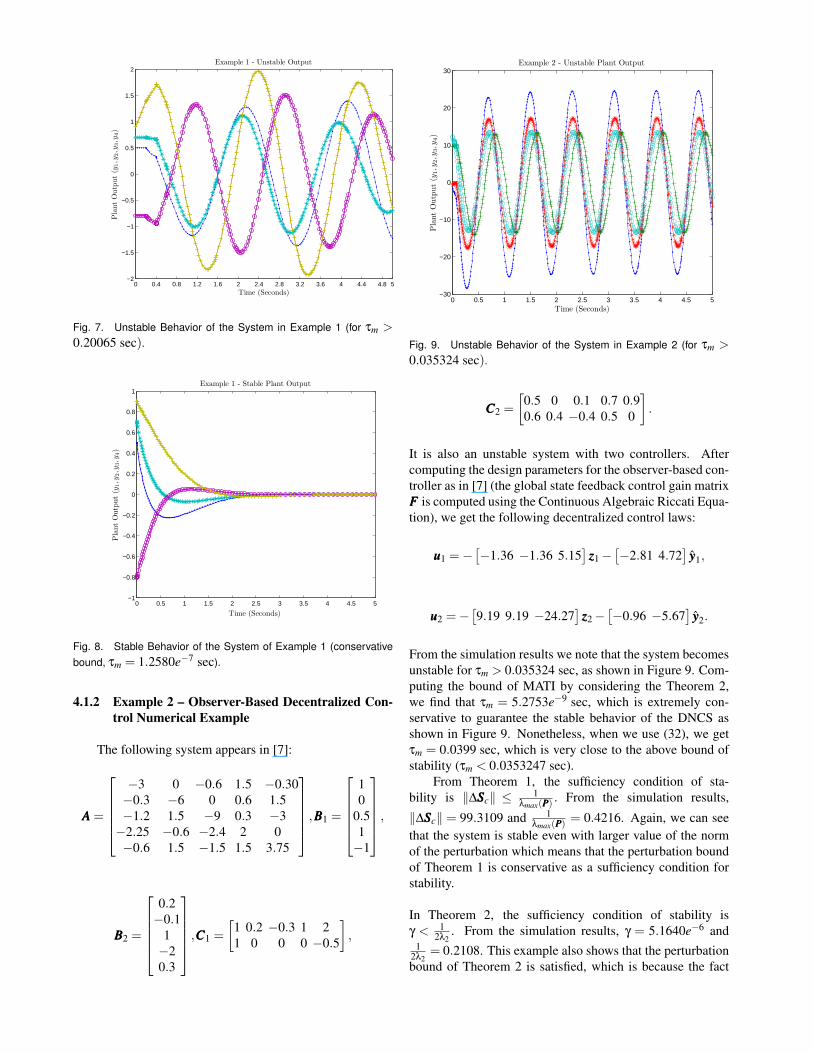
From the simulation results we note that the system be-comes unstable for τm > 0.20065 sec, as shown in Figure 7.The matrix norm used in the simulations is the Euclideannorm. When we compute the bound of MATI using Theo-rem 2, we get τm = 1.2580e−7 sec ,which is very conserva-tive to guarantee the stable behavior of the DNCS as shownin Figure 8. On the other hand, when we use (32), we getτm = 0.1922 sec, which is very close to the above bound ofstability (τm < 0.20065 sec).
In Theorem 1, the sufficiency condition of stabilityis ‖∆SSSc‖ ≤ 1
λmax(PPP). From the simulation results, ‖∆SSSc‖ =
20.2418 and 1λmax(PPP)
= 0.4341. We can see that the systemis stable even with larger value of the norm of the pertur-bation which means that the perturbation bound of Theo-rem 1 is conservative as a sufficiency condition for stabil-ity. In Theorem 2, the sufficiency condition of stability isγ < 1
2λ2. From the simulation results, γ = 1.1064e−5 and
12λ2
= 0.2171. Unlike the bound of Theorem 1, the perturba-tion bound of Theorem 2 is satisfied since the MATI boundin Theorem 2 that we used is very conservative as we men-tioned before (τm = 1.2580e−7 sec).
0 0.4 0.8 1.2 1.6 2 2.4 2.8 3.2 3.6 4 4.4 4.8 5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time (Seconds)
PlantOutput(y
1,y
2,y
3,y
4)
Example 1 - Unstable Output
Fig. 7. Unstable Behavior of the System in Example 1 (for τm >0.20065 sec).
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time (Seconds)
PlantOutput(y
1,y
2,y
3,y
4)
Example 1 - Stable Plant Output
Fig. 8. Stable Behavior of the System of Example 1 (conservativebound, τm = 1.2580e−7 sec).
4.1.2 Example 2 – Observer-Based Decentralized Con-trol Numerical Example
The following system appears in [7]:
AAA =
−3 0 −0.6 1.5 −0.30−0.3 −6 0 0.6 1.5−1.2 1.5 −9 0.3 −3−2.25 −0.6 −2.4 2 0−0.6 1.5 −1.5 1.5 3.75
,BBB1 =
10
0.51−1
,
BBB2 =
0.2−0.1
1−20.3
,CCC1 =
[1 0.2 −0.3 1 21 0 0 0 −0.5
],
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−30
−20
−10
0
10
20
30
Time (Seconds)
PlantOutput(y
1,y
2,y
3,y
4)
Example 2 - Unstable Plant Output
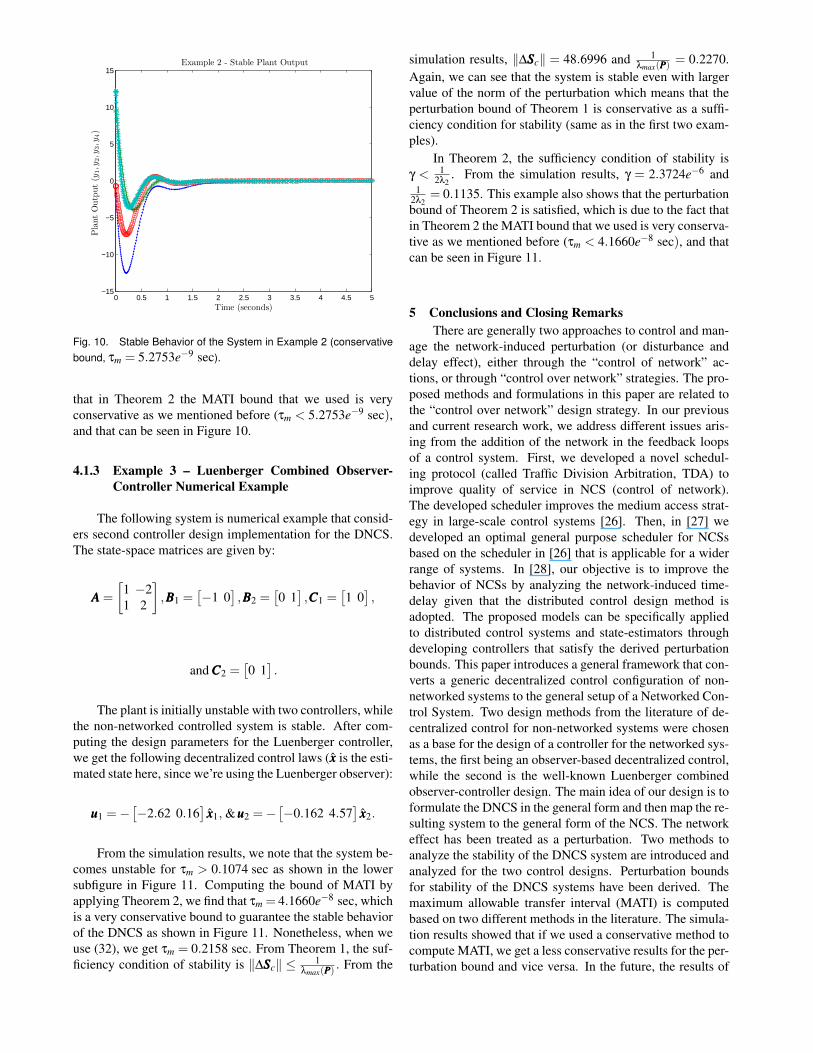
Fig. 9. Unstable Behavior of the System in Example 2 (for τm >0.035324 sec).
CCC2 =
[0.5 0 0.1 0.7 0.90.6 0.4 −0.4 0.5 0
].
It is also an unstable system with two controllers. Aftercomputing the design parameters for the observer-based con-troller as in [7] (the global state feedback control gain matrixFFF is computed using the Continuous Algebraic Riccati Equa-tion), we get the following decentralized control laws:
uuu1 =−[−1.36 −1.36 5.15
]zzz1−
[−2.81 4.72
]yyy1,
uuu2 =−[9.19 9.19 −24.27
]zzz2−
[−0.96 −5.67
]yyy2.
From the simulation results we note that the system becomesunstable for τm > 0.035324 sec, as shown in Figure 9. Com-puting the bound of MATI by considering the Theorem 2,we find that τm = 5.2753e−9 sec, which is extremely con-servative to guarantee the stable behavior of the DNCS asshown in Figure 9. Nonetheless, when we use (32), we getτm = 0.0399 sec, which is very close to the above bound ofstability (τm < 0.0353247 sec).
From Theorem 1, the sufficiency condition of sta-bility is ‖∆SSSc‖ ≤ 1
λmax(PPP). From the simulation results,
‖∆SSSc‖ = 99.3109 and 1λmax(PPP)
= 0.4216. Again, we can seethat the system is stable even with larger value of the normof the perturbation which means that the perturbation boundof Theorem 1 is conservative as a sufficiency condition forstability.
In Theorem 2, the sufficiency condition of stability isγ < 1
2λ2. From the simulation results, γ = 5.1640e−6 and
12λ2
= 0.2108. This example also shows that the perturbationbound of Theorem 2 is satisfied, which is because the fact
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−15
−10
−5
0
5
10
15
Time (seconds)
PlantOutput(y
1,y
2,y
3,y
4)
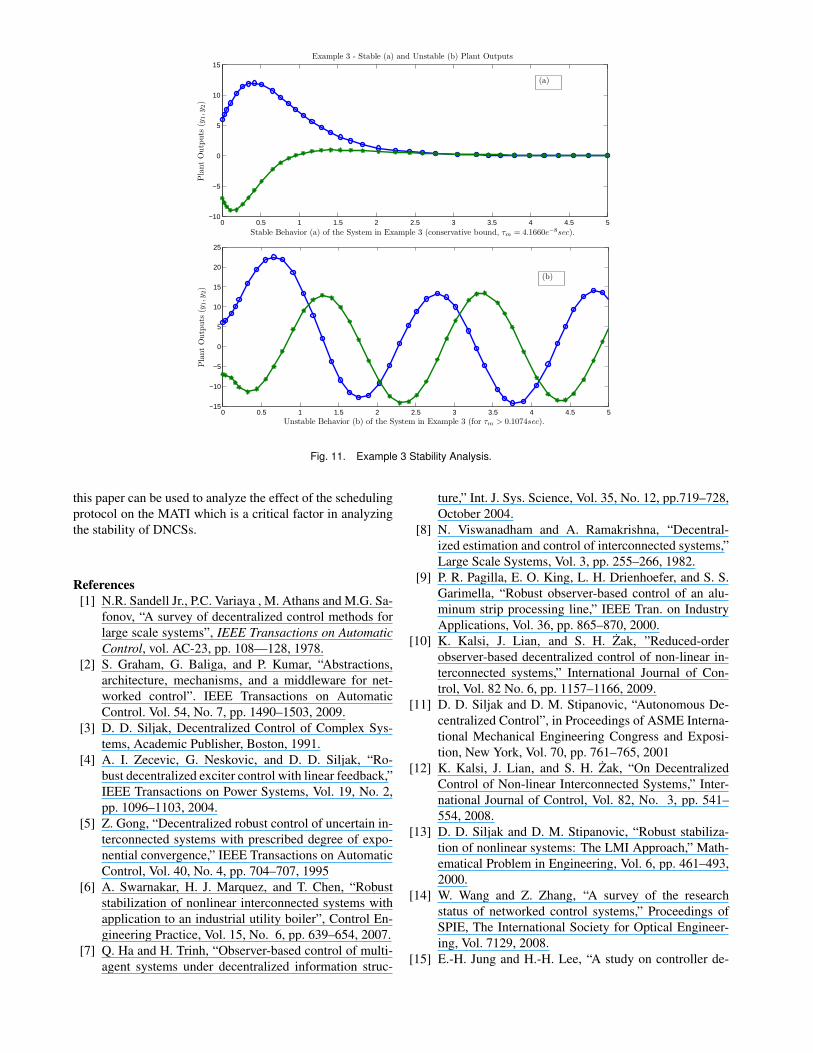
Example 2 - Stable Plant Output
Fig. 10. Stable Behavior of the System in Example 2 (conservativebound, τm = 5.2753e−9 sec).
that in Theorem 2 the MATI bound that we used is veryconservative as we mentioned before (τm < 5.2753e−9 sec),and that can be seen in Figure 10.
4.1.3 Example 3 – Luenberger Combined Observer-Controller Numerical Example
The following system is numerical example that consid-ers second controller design implementation for the DNCS.The state-space matrices are given by:
AAA =
[1 −21 2
],BBB1 =
[−1 0
],BBB2 =
[0 1],CCC1 =
[1 0],
and CCC2 =[0 1].
The plant is initially unstable with two controllers, whilethe non-networked controlled system is stable. After com-puting the design parameters for the Luenberger controller,we get the following decentralized control laws (xxx is the esti-mated state here, since we’re using the Luenberger observer):
uuu1 =−[−2.62 0.16
]xxx1, &uuu2 =−
[−0.162 4.57
]xxx2.
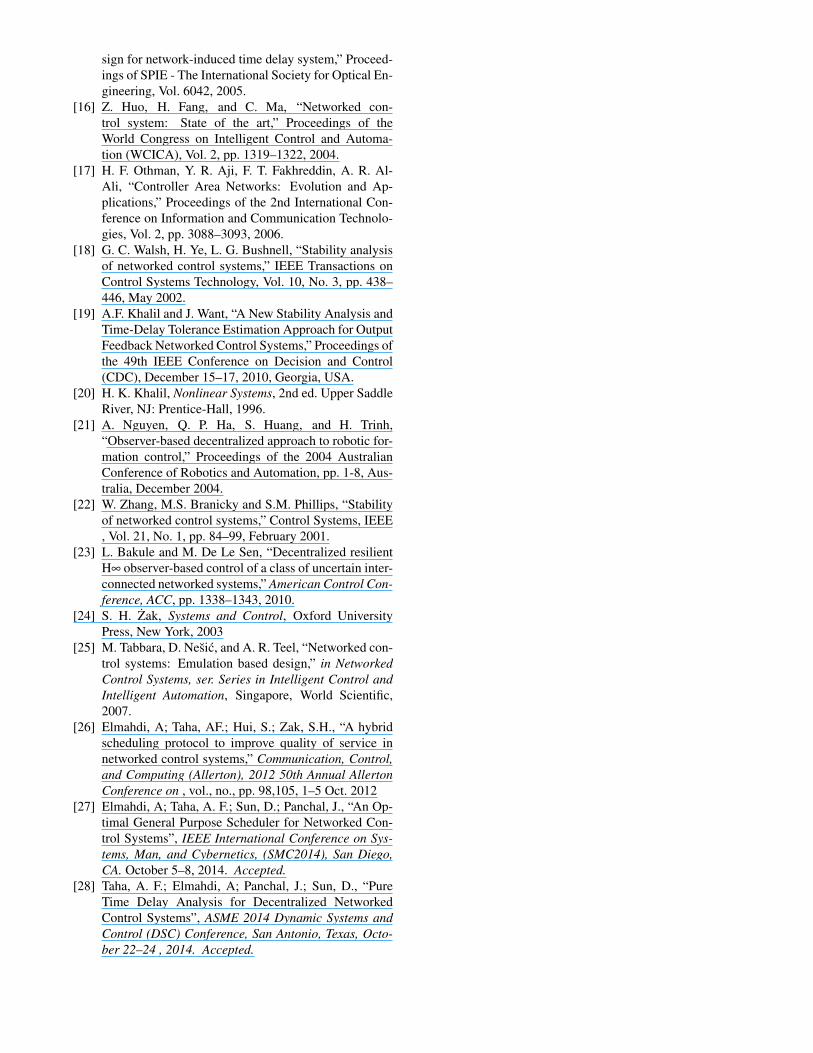
From the simulation results, we note that the system be-comes unstable for τm > 0.1074 sec as shown in the lowersubfigure in Figure 11. Computing the bound of MATI byapplying Theorem 2, we find that τm = 4.1660e−8 sec, whichis a very conservative bound to guarantee the stable behaviorof the DNCS as shown in Figure 11. Nonetheless, when weuse (32), we get τm = 0.2158 sec. From Theorem 1, the suf-ficiency condition of stability is ‖∆SSSc‖ ≤ 1
λmax(PPP). From the
simulation results, ‖∆SSSc‖ = 48.6996 and 1λmax(PPP)
= 0.2270.Again, we can see that the system is stable even with largervalue of the norm of the perturbation which means that theperturbation bound of Theorem 1 is conservative as a suffi-ciency condition for stability (same as in the first two exam-ples).
In Theorem 2, the sufficiency condition of stability isγ < 1
2λ2. From the simulation results, γ = 2.3724e−6 and
12λ2
= 0.1135. This example also shows that the perturbationbound of Theorem 2 is satisfied, which is due to the fact thatin Theorem 2 the MATI bound that we used is very conserva-tive as we mentioned before (τm < 4.1660e−8 sec), and thatcan be seen in Figure 11.
5 Conclusions and Closing RemarksThere are generally two approaches to control and man-
age the network-induced perturbation (or disturbance anddelay effect), either through the “control of network” ac-tions, or through “control over network” strategies. The pro-posed methods and formulations in this paper are related tothe “control over network” design strategy. In our previousand current research work, we address different issues aris-ing from the addition of the network in the feedback loopsof a control system. First, we developed a novel schedul-ing protocol (called Traffic Division Arbitration, TDA) toimprove quality of service in NCS (control of network).The developed scheduler improves the medium access strat-egy in large-scale control systems [26]. Then, in [27] wedeveloped an optimal general purpose scheduler for NCSsbased on the scheduler in [26] that is applicable for a widerrange of systems. In [28], our objective is to improve thebehavior of NCSs by analyzing the network-induced time-delay given that the distributed control design method isadopted. The proposed models can be specifically appliedto distributed control systems and state-estimators throughdeveloping controllers that satisfy the derived perturbationbounds. This paper introduces a general framework that con-verts a generic decentralized control configuration of non-networked systems to the general setup of a Networked Con-trol System. Two design methods from the literature of de-centralized control for non-networked systems were chosenas a base for the design of a controller for the networked sys-tems, the first being an observer-based decentralized control,while the second is the well-known Luenberger combinedobserver-controller design. The main idea of our design is toformulate the DNCS in the general form and then map the re-sulting system to the general form of the NCS. The networkeffect has been treated as a perturbation. Two methods toanalyze the stability of the DNCS system are introduced andanalyzed for the two control designs. Perturbation boundsfor stability of the DNCS systems have been derived. Themaximum allowable transfer interval (MATI) is computedbased on two different methods in the literature. The simula-tion results showed that if we used a conservative method tocompute MATI, we get a less conservative results for the per-turbation bound and vice versa. In the future, the results of
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−10
−5
0
5
10
15
Stable Behavior (a) of the System in Example 3 (conservative bound, τm = 4.1660e−8sec).
PlantOutputs
(y1,y
2)
Example 3 - Stable (a) and Unstable (b) Plant Outputs
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−15
−10
−5
0
5
10
15
20
25
Unstable Behavior (b) of the System in Example 3 (for τm > 0.1074sec).
PlantOutputs
(y1,y
2)
(a)
(b)
Fig. 11. Example 3 Stability Analysis.
this paper can be used to analyze the effect of the schedulingprotocol on the MATI which is a critical factor in analyzingthe stability of DNCSs.
References[1] N.R. Sandell Jr., P.C. Variaya , M. Athans and M.G. Sa-
fonov, “A survey of decentralized control methods forlarge scale systems”, IEEE Transactions on AutomaticControl, vol. AC-23, pp. 108—128, 1978.
[2] S. Graham, G. Baliga, and P. Kumar, “Abstractions,architecture, mechanisms, and a middleware for net-worked control”. IEEE Transactions on AutomaticControl. Vol. 54, No. 7, pp. 1490–1503, 2009.
[3] D. D. Siljak, Decentralized Control of Complex Sys-tems, Academic Publisher, Boston, 1991.
[4] A. I. Zecevic, G. Neskovic, and D. D. Siljak, “Ro-bust decentralized exciter control with linear feedback,”IEEE Transactions on Power Systems, Vol. 19, No. 2,pp. 1096–1103, 2004.
[5] Z. Gong, “Decentralized robust control of uncertain in-terconnected systems with prescribed degree of expo-nential convergence,” IEEE Transactions on AutomaticControl, Vol. 40, No. 4, pp. 704–707, 1995
[6] A. Swarnakar, H. J. Marquez, and T. Chen, “Robuststabilization of nonlinear interconnected systems withapplication to an industrial utility boiler”, Control En-gineering Practice, Vol. 15, No. 6, pp. 639–654, 2007.
[7] Q. Ha and H. Trinh, “Observer-based control of multi-agent systems under decentralized information struc-
ture,” Int. J. Sys. Science, Vol. 35, No. 12, pp.719–728,October 2004.
[8] N. Viswanadham and A. Ramakrishna, “Decentral-ized estimation and control of interconnected systems,”Large Scale Systems, Vol. 3, pp. 255–266, 1982.
[9] P. R. Pagilla, E. O. King, L. H. Drienhoefer, and S. S.Garimella, “Robust observer-based control of an alu-minum strip processing line,” IEEE Tran. on IndustryApplications, Vol. 36, pp. 865–870, 2000.
[10] K. Kalsi, J. Lian, and S. H. Zak, ”Reduced-orderobserver-based decentralized control of non-linear in-terconnected systems,” International Journal of Con-trol, Vol. 82 No. 6, pp. 1157–1166, 2009.
[11] D. D. Siljak and D. M. Stipanovic, “Autonomous De-centralized Control”, in Proceedings of ASME Interna-tional Mechanical Engineering Congress and Exposi-tion, New York, Vol. 70, pp. 761–765, 2001
[12] K. Kalsi, J. Lian, and S. H. Zak, “On DecentralizedControl of Non-linear Interconnected Systems,” Inter-national Journal of Control, Vol. 82, No. 3, pp. 541–554, 2008.
[13] D. D. Siljak and D. M. Stipanovic, “Robust stabiliza-tion of nonlinear systems: The LMI Approach,” Math-ematical Problem in Engineering, Vol. 6, pp. 461–493,2000.
[14] W. Wang and Z. Zhang, “A survey of the researchstatus of networked control systems,” Proceedings ofSPIE, The International Society for Optical Engineer-ing, Vol. 7129, 2008.
[15] E.-H. Jung and H.-H. Lee, “A study on controller de-
sign for network-induced time delay system,” Proceed-ings of SPIE - The International Society for Optical En-gineering, Vol. 6042, 2005.
[16] Z. Huo, H. Fang, and C. Ma, “Networked con-trol system: State of the art,” Proceedings of theWorld Congress on Intelligent Control and Automa-tion (WCICA), Vol. 2, pp. 1319–1322, 2004.
[17] H. F. Othman, Y. R. Aji, F. T. Fakhreddin, A. R. Al-Ali, “Controller Area Networks: Evolution and Ap-plications,” Proceedings of the 2nd International Con-ference on Information and Communication Technolo-gies, Vol. 2, pp. 3088–3093, 2006.
[18] G. C. Walsh, H. Ye, L. G. Bushnell, “Stability analysisof networked control systems,” IEEE Transactions onControl Systems Technology, Vol. 10, No. 3, pp. 438–446, May 2002.
[19] A.F. Khalil and J. Want, “A New Stability Analysis andTime-Delay Tolerance Estimation Approach for OutputFeedback Networked Control Systems,” Proceedings ofthe 49th IEEE Conference on Decision and Control(CDC), December 15–17, 2010, Georgia, USA.
[20] H. K. Khalil, Nonlinear Systems, 2nd ed. Upper SaddleRiver, NJ: Prentice-Hall, 1996.
[21] A. Nguyen, Q. P. Ha, S. Huang, and H. Trinh,“Observer-based decentralized approach to robotic for-mation control,” Proceedings of the 2004 AustralianConference of Robotics and Automation, pp. 1-8, Aus-tralia, December 2004.
[22] W. Zhang, M.S. Branicky and S.M. Phillips, “Stabilityof networked control systems,” Control Systems, IEEE, Vol. 21, No. 1, pp. 84–99, February 2001.
[23] L. Bakule and M. De Le Sen, “Decentralized resilientH∞ observer-based control of a class of uncertain inter-connected networked systems,” American Control Con-ference, ACC, pp. 1338–1343, 2010.
[24] S. H. Zak, Systems and Control, Oxford UniversityPress, New York, 2003
[25] M. Tabbara, D. Nesic, and A. R. Teel, “Networked con-trol systems: Emulation based design,” in NetworkedControl Systems, ser. Series in Intelligent Control andIntelligent Automation, Singapore, World Scientific,2007.
[26] Elmahdi, A; Taha, AF.; Hui, S.; Zak, S.H., “A hybridscheduling protocol to improve quality of service innetworked control systems,” Communication, Control,and Computing (Allerton), 2012 50th Annual AllertonConference on , vol., no., pp. 98,105, 1–5 Oct. 2012
[27] Elmahdi, A; Taha, A. F.; Sun, D.; Panchal, J., “An Op-timal General Purpose Scheduler for Networked Con-trol Systems”, IEEE International Conference on Sys-tems, Man, and Cybernetics, (SMC2014), San Diego,CA. October 5–8, 2014. Accepted.
[28] Taha, A. F.; Elmahdi, A; Panchal, J.; Sun, D., “PureTime Delay Analysis for Decentralized NetworkedControl Systems”, ASME 2014 Dynamic Systems andControl (DSC) Conference, San Antonio, Texas, Octo-ber 22–24 , 2014. Accepted.
Related Documents





![Submodularity in Input Node Selection for Networked Systems · control networked systems [5]. Moreover, new sub-disciplines of control theory have emerged including networked control](https://static.cupdf.com/doc/110x72/5fbfedb80f1b723af376becf/submodularity-in-input-node-selection-for-networked-systems-control-networked-systems.jpg)




