D D I I S S E E Ñ Ñ O O D D E E L L E E V V A A S S

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

DD II SS EE ÑÑ OO
DD EE
LL EE VV AA SS

Diseño de Levas
Índice de Temas
1. Introducción: ______________________________________________________________ 1
2. Terminología de los mecanismos de levas: _______________________________________ 1
3. Nomenclatura de las levas: ___________________________________________________ 6
4. Movimiento de las levas: _____________________________________________________ 6
5. Método simplificado para trazar el movimiento de una leva: ________________________ 9
6. Diagrama de desplazamiento de levas: _________________________________________ 11
7. Diagrama de distribución: ___________________________________________________ 11
8. Ejemplos de diseño de Levas: ________________________________________________ 12

Diseño de Levas 1
1. Introducción:
Los sistemas de leva y seguidor (o contraleva) son utilizados frecuentemente en muchas
clases de máquinas. Por ejemplo las válvulas en el motor de un automóvil son accionadas por levas,
asimismo, las máquinas empleadas en la manufactura de muchos bienes de consumo tienen en su
interior infinidad de levas.
La leva es un elemento de máquina diseñado para generar un movimiento determinado a un
seguidor por medio de contacto directo.
En general se montan en ejes rotativos, aunque también se utilizan estacionariamente con el
seguidor moviéndose alrededor de éstas. Las levas también producen movimiento oscilatorio o
pueden convertir movimientos de un tipo a otro.
La forma de una leva siempre esta sujeta al movimiento del seguidor. En otros términos su
perfil es el producto del movimiento deseado para el seguidor.
En comparación con los eslabonamientos, los mecanismos accionados por levas son más
fáciles de diseñar para desempeñar una función específica de salida, pero a su vez, resultan más
difíciles y costosos de fabricar.
Un mecanismo de leva es una forma de eslabonamiento de cuatro barras "degradado" en el
que el eslabón acoplador, ha sido reemplazado por una semijunta, como se muestra en la Figura 1.
En una posición instantánea cualquiera de leva y seguidor, podemos sustituir con un
eslabonamiento efectivo que, para esa posición instantánea, tendrá el mismo movimiento que el
sistema original. En efecto, este mecanismo es una cadena cuádruple con eslabones de longitud
efectiva variable. Es esta diferencia conceptual lo que hace que una leva-seguidor sea un flexible y
útil "generador de funciones". Asimismo es posible especificar cualquier función de salida que se
desee, y muy probablemente crear una superficie curva en la leva que genere esa función en el
movimiento del seguidor.
Como se mencionó anteriormente, las levas ofrecen muchas ventajas sobre las articulaciones
de cuatro elementos. Una vez comprendidas son más fáciles de diseñar, y la acción producida por
ellas puede predecirse con exactitud. Por ejemplo, mantener estacionariamente un sistema seguidor
durante una parte de su ciclo, es muy difícil cuando se usan articulaciones. Por medio de una leva,
para resolver este problema, basta mantener un sector de su contorno, concéntricamente con su
centro de giro. De la misma manera es muy difícil por medio de articulaciones, producir un
movimiento, velocidad o aceleración predeterminados, mientras que con las levas es relativamente
simple, en especial cuando el diseño es ejecutado con la ayuda de la computadora.
Sin embargo, si lo que se necesita es un movimiento sin detenciones (solo de subida y
bajada), entonces si se debe considerar encontrar la solución por medio de un eslabonamiento de
manivela-balancín, con el fin de obtener las ventajas relativas de las cadenas cinemáticas sobre las
levas: confiabilidad, fácil construcción y menor costo.
No obstante, si la necesidad de tener un sistema compacto sobrepasa estas últimas
consideraciones, entonces nuevamente puede estar justificada la elección de una leva seguidor en
este tipo de movimiento sin detención.
2. Terminología de los mecanismos de levas:
Los sistemas de leva y seguidor pueden ser clasificados de varias maneras:
Por el tipo de movimiento del seguidor: de traslación o de rotación (oscilatorio);
Por el tipo de leva: radial, cilíndrica, tridimensional;
Por el tipo de cierre de junta: de forma o de fuerza;
Por el tipo de seguidor: curvo o plano, rodante o deslizante;
Por el tipo de restricciones al movimiento: de posición extrema cítrica (CEP, de critical
extreme position), o movimiento en trayectoria crítica (CPM, de critical path motion);
Por el tipo de programa de movimiento: subida-bajada-detenimiento (RFD, de rise-fall-
dwell), subida-detenimiento-bajada-detenimiento (RDFD, de rise-dwell-fall-dwell).
A continuación discutiremos con más detalle cada una de estas clasificaciones.

Diseño de Levas 2
Tipos de Movimiento de Seguidor:
En la Figura 1(a) se muestra un sistema con seguidor rotatorio (u oscilatorio), y en la Figura
1(b) se presenta un seguidor traslatorio. Son análogos a los eslabonamientos de cuatro barras de
manivela-balancín y de manivela-corredera, respectivamente. La elección entre estas dos formas de
mecanismo de leva suele ser decidida por el tipo de movimiento de salida deseado. Si se requiere
traslación rectilínea verdadera, entonces el indicado es el de seguidor traslatorio. Si se necesita
salida de rotación pura, entonces el oscilatorio es la elección obvia. Hay ventajas en cada uno de
estos sistemas, aparte de sus características de movimiento, y esto depende del tipo de seguidor
seleccionado. Lo anterior se describirá en una sección subsiguiente.
Tipo de Cierre de Junta:
El cierre de fuerza, como se muestra en la Figura 1, requiere la aplicación de una fuerza
externa a la junta a fin de mantener los dos eslabones, leva y seguidor, físicamente en contacto. Tal
fuerza suele ser proporcionada por un resorte, se define como positiva cuando actúa en dirección de
cerrar la junta y no puede permitirse que sea negativa. Si lo hace, los eslabones perderán el
contacto, pues una junta con cierre de fuerza solo puede empujar, y no ejercer tracción.
El cierre de forma, como se indica en la Figura 2, cierra la junta por efecto de su
configuración y no requiere ninguna fuerza externa. En realidad hay dos superficies de leva en esta
disposición, una a cada lado del seguidor. Cada superficie empuja, en su turno, para impulsar al
seguidor en uno y otro sentido.
FF II GG UU RR AA 11

Diseño de Levas 3
En la Figura 2 (a y b) se muestran levas de ranura o canaleta que guían al seguidor de
extremos rodante de hongo, y que ejercen acción de empuje o tracción sobre él. En la Figura 2 (c)
se muestra otra variedad de mecanismo de leva con cierre de forma, llamada de levas conjugadas.
Cuando se utilizan levas con cierre de forma en trenes de válvulas de motor de automóvil o
motocicleta, se denominan levas Desmodrómicas.
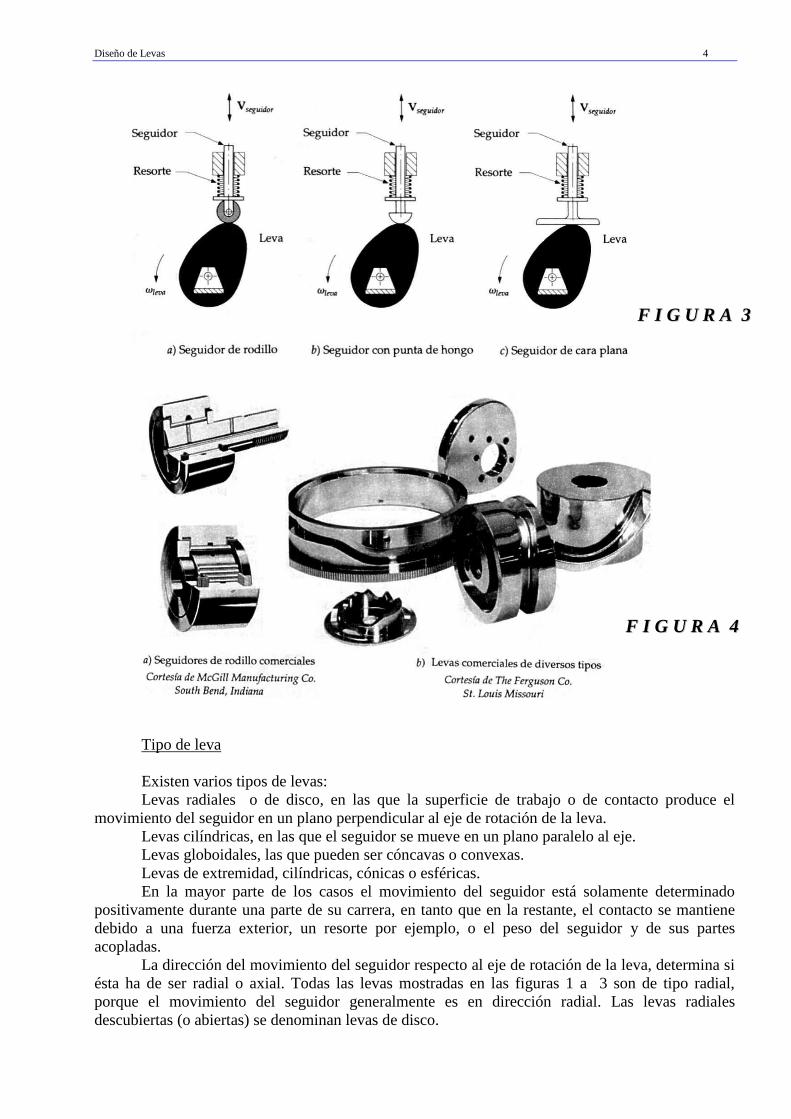
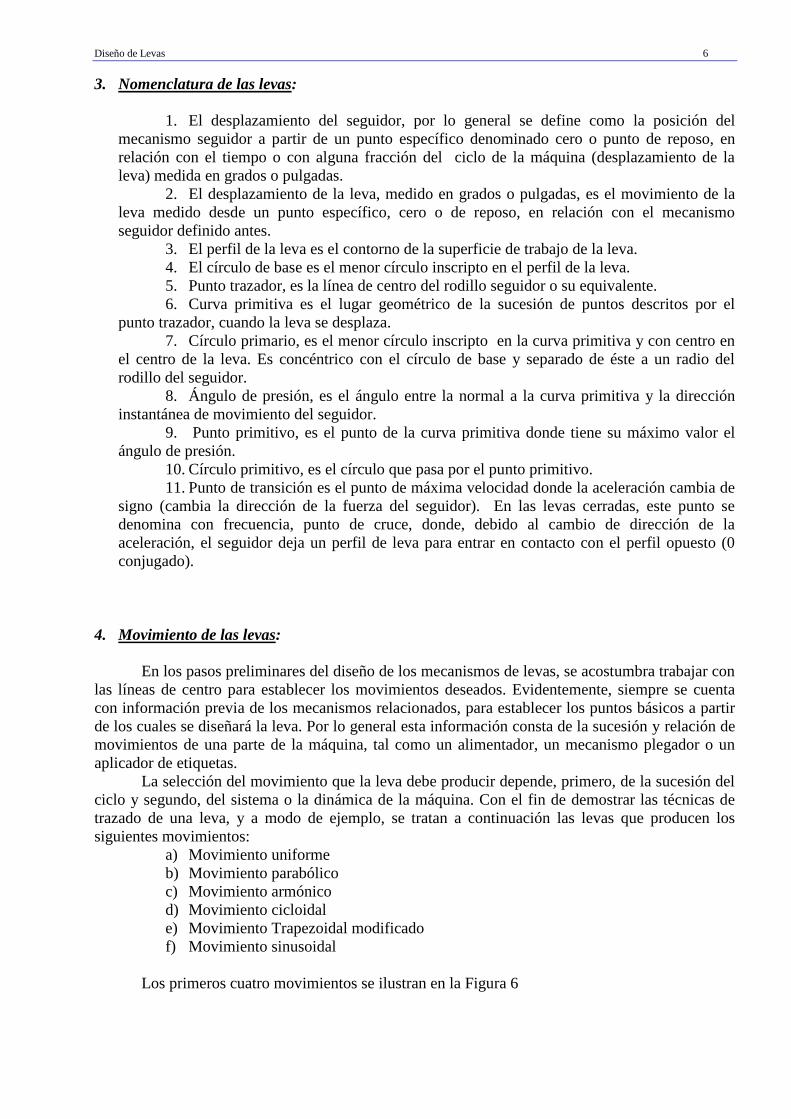
Tipo de Seguidor
En este contexto, este elemento es la parte del eslabón que hace contacto con la leva, y se
llama también contraleva. En la Figura 3 se muestran tres tipos usuales de seguidor: de rodillo, de
hongo (curva) y de cara plana, en levas con cierre de fuerza. El seguidor de rodillo posee la ventaja
de tener menor fricción (por el rodamiento utilizado) que los otros dos tipos, en los que se verifica
un contacto deslizante, pero puede ser más costosa su fabricación. El seguidor de cara plana permite
un conjunto mas compacto que el de rodillo en la mayoría de los diseños de levas; además suele ser
el preferido por este motivo y por el costo, en trenes de válvulas de motores de autos. Los
seguidores de rodillo se usan con frecuencia en maquinaria de producción, donde su facilidad de
reemplazo y gran disponibilidad en las existencias de los fabricantes, constituyen ventajas. Las
levas de ranura o canaleta requieren seguidores de rodillo. Estos elementos son esencialmente
cojinetes de bolas o rodillos con una configuración especial. En la Figura 4 (a) se muestran dos
tipos comunes de seguidores de rodillo comerciales. El seguidor de hongo, así como el de cara
plana, suelen estar diseñados y fabricados para aplicaciones especiales. En caso de aplicaciones de
alto volumen, como los motores de serie, las cantidades por producir son lo suficientemente
grandes, y permiten garantizar la conveniencia de un seguidor de diseño especial.
FF II GG UU RR AA 22
Diseño de Levas 4
Tipo de leva
Existen varios tipos de levas:
Levas radiales o de disco, en las que la superficie de trabajo o de contacto produce el
movimiento del seguidor en un plano perpendicular al eje de rotación de la leva.
Levas cilíndricas, en las que el seguidor se mueve en un plano paralelo al eje.
Levas globoidales, las que pueden ser cóncavas o convexas.
Levas de extremidad, cilíndricas, cónicas o esféricas.
En la mayor parte de los casos el movimiento del seguidor está solamente determinado
positivamente durante una parte de su carrera, en tanto que en la restante, el contacto se mantiene
debido a una fuerza exterior, un resorte por ejemplo, o el peso del seguidor y de sus partes
acopladas.
La dirección del movimiento del seguidor respecto al eje de rotación de la leva, determina si
ésta ha de ser radial o axial. Todas las levas mostradas en las figuras 1 a 3 son de tipo radial,
porque el movimiento del seguidor generalmente es en dirección radial. Las levas radiales
descubiertas (o abiertas) se denominan levas de disco.
FF II GG UU RR AA 33
FF II GG UU RR AA 44

Diseño de Levas 5
Tipos de Restricciones de Movimiento
Existen dos formas generales de restringir el movimiento: la denominada posición extrema
crítica (CEP, de critical extreme position) y la de movimiento de trayectoria crítica (CPM, de
critical path motion). La CEP se refiere al caso en que las especificaciones de diseño definen las
posiciones inicial y final del seguidor (es decir, sus posiciones extremas), pero no especifican
restricción alguna al movimiento de trayectoria entre las posiciones extremas. Este caso es el más
fácil de diseñar de los dos, ya que el proyectista tiene amplia libertad de elegir las funciones de leva
que controlan el movimiento entre extremos. El CPM es un problema más restringido que el CEP,
pues el movimiento de trayectoria, y / o uno o más de sus derivados están definidos sobre todo o
parte del intervalo de movimiento. Esto es análogo a la generación de función en el diseño de
eslabonamientos, excepto que con una leva se obtiene una fusión de salida continua para el
seguidor. Sólo puede ser posible crear una aproximación de la función especificada, y conservar
todavía un comportamiento dinámico adecuado.
Tipo de programa de movimiento
Los programas cinemáticos denominados (RF) subir-bajar, (RFD) subir-bajar-detenimiento
y (RDFD) subir-detenimiento-bajar-detenimiento, se refieren todos al caso CEP de restricción de
movimiento, y definen realmente cuántas detenciones existen en el ciclo de movimiento completo,
ya sea sin detención RF, con una detención RFD o con más de una RDFD. Los detenimientos,
definidos como movimiento nulo de salida durante un lapso especificado de movimiento de entrada,
son una característica importante de los sistemas de leva y seguidor, pues como se comentó en
párrafos anteriores, es muy fácil crear detenimientos exactos en tales mecanismos.
En la Figura 5 se muestra
una leva axial, cuyo seguidor
se mueve paralelamente al
eje de rotación de aquella
FF II GG UU RR AA 55
Diseño de Levas 6
3. Nomenclatura de las levas:
1. El desplazamiento del seguidor, por lo general se define como la posición del
mecanismo seguidor a partir de un punto específico denominado cero o punto de reposo, en
relación con el tiempo o con alguna fracción del ciclo de la máquina (desplazamiento de la
leva) medida en grados o pulgadas.
2. El desplazamiento de la leva, medido en grados o pulgadas, es el movimiento de la
leva medido desde un punto específico, cero o de reposo, en relación con el mecanismo
seguidor definido antes.
3. El perfil de la leva es el contorno de la superficie de trabajo de la leva.
4. El círculo de base es el menor círculo inscripto en el perfil de la leva.
5. Punto trazador, es la línea de centro del rodillo seguidor o su equivalente.
6. Curva primitiva es el lugar geométrico de la sucesión de puntos descritos por el
punto trazador, cuando la leva se desplaza.
7. Círculo primario, es el menor círculo inscripto en la curva primitiva y con centro en
el centro de la leva. Es concéntrico con el círculo de base y separado de éste a un radio del
rodillo del seguidor.
8. Ángulo de presión, es el ángulo entre la normal a la curva primitiva y la dirección
instantánea de movimiento del seguidor.
9. Punto primitivo, es el punto de la curva primitiva donde tiene su máximo valor el
ángulo de presión.
10. Círculo primitivo, es el círculo que pasa por el punto primitivo.
11. Punto de transición es el punto de máxima velocidad donde la aceleración cambia de
signo (cambia la dirección de la fuerza del seguidor). En las levas cerradas, este punto se
denomina con frecuencia, punto de cruce, donde, debido al cambio de dirección de la
aceleración, el seguidor deja un perfil de leva para entrar en contacto con el perfil opuesto (0
conjugado).
4. Movimiento de las levas:
En los pasos preliminares del diseño de los mecanismos de levas, se acostumbra trabajar con
las líneas de centro para establecer los movimientos deseados. Evidentemente, siempre se cuenta
con información previa de los mecanismos relacionados, para establecer los puntos básicos a partir
de los cuales se diseñará la leva. Por lo general esta información consta de la sucesión y relación de
movimientos de una parte de la máquina, tal como un alimentador, un mecanismo plegador o un
aplicador de etiquetas.
La selección del movimiento que la leva debe producir depende, primero, de la sucesión del
ciclo y segundo, del sistema o la dinámica de la máquina. Con el fin de demostrar las técnicas de
trazado de una leva, y a modo de ejemplo, se tratan a continuación las levas que producen los
siguientes movimientos:
a) Movimiento uniforme
b) Movimiento parabólico
c) Movimiento armónico
d) Movimiento cicloidal
e) Movimiento Trapezoidal modificado
f) Movimiento sinusoidal
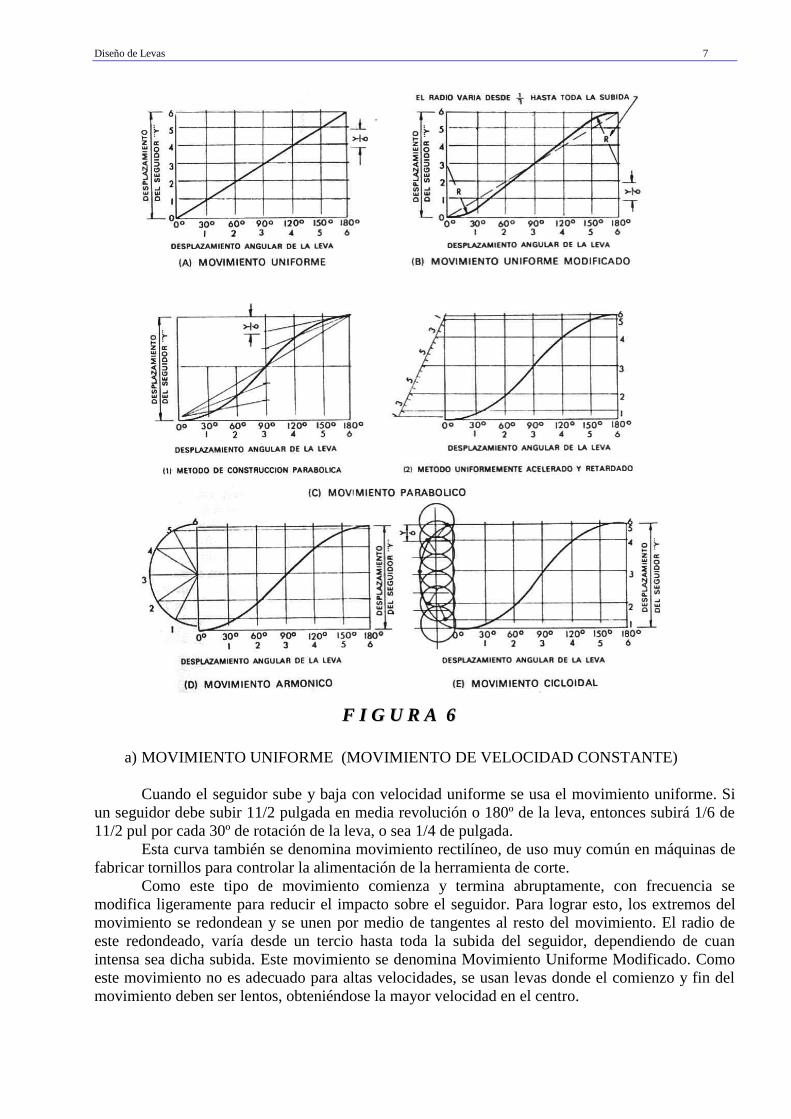
Los primeros cuatro movimientos se ilustran en la Figura 6
Diseño de Levas 7
a) MOVIMIENTO UNIFORME (MOVIMIENTO DE VELOCIDAD CONSTANTE)
Cuando el seguidor sube y baja con velocidad uniforme se usa el movimiento uniforme. Si
un seguidor debe subir 11/2 pulgada en media revolución o 180º de la leva, entonces subirá 1/6 de
11/2 pul por cada 30º de rotación de la leva, o sea 1/4 de pulgada.
Esta curva también se denomina movimiento rectilíneo, de uso muy común en máquinas de
fabricar tornillos para controlar la alimentación de la herramienta de corte.
Como este tipo de movimiento comienza y termina abruptamente, con frecuencia se
modifica ligeramente para reducir el impacto sobre el seguidor. Para lograr esto, los extremos del
movimiento se redondean y se unen por medio de tangentes al resto del movimiento. El radio de
este redondeado, varía desde un tercio hasta toda la subida del seguidor, dependiendo de cuan
intensa sea dicha subida. Este movimiento se denomina Movimiento Uniforme Modificado. Como
este movimiento no es adecuado para altas velocidades, se usan levas donde el comienzo y fin del
movimiento deben ser lentos, obteniéndose la mayor velocidad en el centro.
FF II GG UU RR AA 66

Diseño de Levas 8
b) MOVIMIENTO PARABÓLICO
Por lo común este movimiento se denomina Movimiento Uniformemente Acelerado y
Retardado o Movimiento de Aceleración Constante, y es una curva que se genera distribuyendo
proporcionalmente al cuadrado del tiempo, la distancia viajada por el seguidor.
Siguiendo el método de construcción uniformemente acelerado y retardado, para este
movimiento, las divisiones aumentan y disminuyen con una relación de 1:3:5:5:3:1. Por ejemplo, un
seguidor debe subir 21/4 pul en 180º; trazando puntos cada 30º y usando seis divisiones
proporcionales 1:3:5:5:3:1, los primeros 30º el seguidor sube 1/18 del total de 21/4 pul o sea 1/8
pul, en los próximos 30º el seguidor sube 3/18 del total o sea 3/8 pul, en los terceros 30º el seguidor
sube 5/18 o sea 5/8 pul, la cuarta, quinta y última subidas del seguidor son 5/8, 3/8 y 1/8 pul
respectivamente. Este movimiento producirá un tirón, si se combina con una leva con intervalo sin
movimiento del seguidor.
c) MOVIMIENTO ARMÓNICO
Este movimiento frecuentemente denominado de manivela, se produce por medio de una
excéntrica operando con un seguidor plano cuya superficie sea normal a la dirección del
desplazamiento lineal. La Figura 7 ilustra este tipo de levas. No obstante la mayoría de las veces es
necesario producir un desplazamiento armónico simple de menos de 360º de rotación de la leva
como lo ilustra la Figura 8; las ordenadas para el trazado de la curva primitiva de la leva se pueden
determinar como se indica en la Figura 6. En este caso es imposible el uso de seguidores planos, ya
que generalmente la curva primitiva, armónica, tiene curvas inversas confluentes, en las que un
seguidor plano operaría como puente sin tocar la parte mas baja. Como el seguidor mas práctico es
el de rodillo, el desarrollo del perfil de la leva se ha ilustrado con este seguidor. Este movimiento
también produciría un tirón, si se combina en una leva con intervalo sin movimiento del seguidor.
Para ilustrar el efecto de desplazamiento de una leva en el ángulo de presión, para un tamaño
determinado de leva y seguidor, se muestra la curva de retorno, o caída, con un ángulo mayor.
Nótese que el ángulo máximo de presión, se ha reducido considerablemente.
FF II GG UU RR AA 77
FF II GG UU RR AA 88

Diseño de Levas 9
d) MOVIMIENTO CICLOIDAL
La Figura 6 (e) ilustra el método gráfico para trazar el perfil de una leva cicloidal por medio
de un círculo que rueda como se muestra al lado izquierdo de la figura. Cuando una leva se fabrica
exactamente con esta curva aún con intervalos, produce un movimiento suave y exento de tirones.
Esta curva tiene su mejor aplicación con cargas livianas y altas velocidades.
e) MOVIMIENTO TRAPEZOIDAL MODIFICADO
El movimiento trapezoidal modificado es producto de la combinación del movimiento
cicloidal y el de aceleración constante. La exactitud en la manufactura de estas levas es menos
crítica que las del tipo cicloidal. Una de las ventajas sobre la curva cicloidal es la menor aceleración
del seguidor lo que se traduce en menores fuerzas sobre el sistema seguidor.
El sistema trapezoidal trata en mejor forma las fuerzas de inercia, que el cicloidal; además
esta curva se encuentra exenta de tirones aún en levas con intervalos.
g) MOVIMIENTO SINUSOIDAL MODIFICADO
Este movimiento es una combinación de la curva cicloidal y la armónica. Esta curva absorbe más
errores que la trapezoidal modificada, o la curva cicloidal. El cambio en momento torsional de
positivo a negativo es de 0,20 en el movimiento trapezoidal modificado y 0,40 en el sinusoidal
modificado, lo que quiere decir que puede soportarse mas flexibilidad, o elasticidad en la
transmisión de entrada con el sistema sinusoidal modificado que con el trapezoidal modificado.
La curva sinusoidal es ideal en casos de alta inercia y velocidades razonablemente altas.
5. Método simplificado para trazar el movimiento de una leva:
El método ilustrado en la Figura 9 (B) es rápido y preciso para el trazado de levas. Las divisiones
de las líneas en la Figura 9 (A) se hacen exactamente para los varios movimientos de la leva. Por
ejemplo, el trazado de una leva de movimiento parabólico de 21/4 pul en una rotación de 120º.
MÉTODO
1. Se trazan dos líneas paralelas a 21/4 pul representando la subida de la leva.
2. Se selecciona una distancia horizontal conveniente para representar el desplazamiento de la
leva y se dividen los 120º en diez partes iguales (12º,24º,36º,...etc.).
3. Usando el borde de una hoja de papel se marcan las divisiones del movimiento parabólico
mostradas en la Figura 9 (A).
4. Usando este papel marcado como una escala, se trazan las divisiones entre las líneas a 21/4
pul como se muestra en la Figura 9 (B).
5. Las divisiones se proyectan horizontalmente hasta sus divisiones respectivas de la leva y se
traza la curva.

Diseño de Levas 10
FF II GG UU RR AA 99

Diseño de Levas 11
6. Diagrama de desplazamiento de levas:
En la preparación de dibujos de levas, primero se traza un diagrama de desplazamiento de la leva
para determinar el movimiento del seguidor. La curva representa el camino del seguidor no el perfil
de la leva. La longitud del diagrama puede ser cualquiera conveniente, aunque frecuentemente se
traza igual a la circunferencia del círculo de base de la leva y la altura igual al desplazamiento del
seguidor. Las líneas trazadas en el diagrama de movimiento aparecen como líneas radiales en la
leva y sus tamaños se trasladan del diagrama de movimiento al dibujo de la leva.
La Figura 10 ilustra un diagrama de desplazamiento que tiene tres movimientos diferentes y tres
intervalos. La mayoría de los diagramas presentan los 360º del ángulo de desplazamiento de la leva.
7. Diagrama de distribución:
Un método conveniente de relacionar los movimientos de varios miembros actuados por levas es
por medio de los diagramas de distribución.
FF II GG UU RR AA 1100
FF II GG UU RR AA 1111
La Figura 11, ilustra la relación de los
diagramas de distribución de tres levas. Si
los desplazamientos se dibujan a escala, el
diagrama se puede usar para verificar
interferencias. Si se toma el desplazamiento
igual a cero para denotar el radio del
círculo primario el diagrama de
distribución puede ser empleado por el
fabricante de la leva para obtener la
información total de la leva. La única
información adicional necesaria es el
dibujo detallado del disco antes de cortar la
leva.

Diseño de Levas 12
8. Ejemplos de diseño de Levas:
EJEMPLO 1: Se desea diseñar una leva de doble detenimiento la cual impulse una estación
alimentadora de envases de pasta dentífrica. El seguidor recibe un tubo vacío (durante el
detenimiento bajo), luego desplaza a dicho tubo a una estación de llenado (durante la acción de
subida), sostiene al tubo absolutamente inmóvil en una posición definida mientras el dentífrico es
inyectado por el fondo abierto del envase (durante el detenimiento alto), y a continuación devuelve
al tubo ya lleno a la posición de partida (cero), reteniéndolo en esta otra posición definida, donde
otro mecanismo (durante el detenimiento bajo) toma dicho tubo y lo lleva a la siguiente operación
de cierre y sellado del fondo.
Solución: Este es un caso típico de restricción de movimiento tipo (CEP) de Posición Extrema
Crítica, ya que solo se especifican las posiciones a alcanzar pero nada en absoluto de la forma de
llegar a ellas.
Tomemos entonces como datos del problema los siguientes:
Detenimiento en desplazamiento cero para 90º (detenimiento bajo)
Subida 1 pulgada en 90º
Detenimiento en 1 pulgada para 90º (detenimiento alto)
Bajada 1 pulgada en 90º
ω Leva 2 π rad/s = 1 rev/s
Comencemos el diseño realizando un diagrama de temporización el cual representará gráficamente
los eventos especificados en el ciclo de la máquina.
Como se puede observar, en este diagrama nada se especifica acerca de las funciones a emplear
para pasar de la posición de detenimiento bajo (un extremo) a la posición de detenimiento alto (el
otro extremo). En este caso el diseñador tiene toda la libertad para elegir cualquier función que
efectúe este trabajo. De esta manera, usaremos este ejemplo para investigar varios modos distintos
de cumplir con las especificaciones, comparándolos entre sí.
1/1 Un diseño extremadamente simple nos llevaría a unir los puntos del diagrama de
temporización para crear el de desplazamiento como se muestra en la Figura Ej. 1-1.
Esta solución es aceptable solo cuando se trata de levas de movimiento muy lento. Sin embargo,
cuando las velocidades son considerables es imposible ignorar el efecto que produce sobre las
derivadas de orden superior la función de movimiento uniforme de velocidad constante.
FF II GG UU RR AA EEjj.. 11

Diseño de Levas 13
1/2 El diseño anterior nos lleva a la conclusión que toda leva diseñada para operación a
velocidades superiores a las muy bajas debe cumplir que la función debe ser continua a través de la
primera y la segunda derivada del desplazamiento en todo el intervalo (360º). Esto equivale a decir
que la función definida como “rapidez de aceleración” o “tirón” o “sacudida” (en inglés Jerk) debe
ser finita en todo el intervalo.
Recordemos además que el movimiento no se puede definir mediante una sola expresión
matemática, sino que debe definirse con varias funciones independientes, cada una de las cuales
determina el comportamiento del seguidor sobre un segmento, o porción, de la leva. Deben tener
continuidad de tercer orden (la función mas dos derivadas) en todas las fronteras. Las funciones de
desplazamiento, velocidad y aceleración deben carecer de discontinuidades.
Con el fin de obtener el resultado requerido anteriormente se podrán tomar funciones polinomiales
con al menos un polinomio de tercer grado (cúbico) como función de desplazamiento. Este se
“degradará” a una función de primer grado en la aceleración obteniéndose discontinuidades pero sin
llegar a tender a infinito lo cual da la posibilidad de un manejo aceptable de los valores.
No obstante tomemos para la resolución de este ejemplo otra familia de curvas que tienen la
propiedad de permanecer continuas a través de cualquier número de derivaciones. En la derivación
sucesiva de las funciones armónicas, el seno se convierte en coseno, el que luego resulta un seno
negativo, y éste en un coseno negativo y así sucesivamente siendo sus ecuaciones:
FF II GG UU RR AA EEjj.. 11--11
En la gráfica se pueden observar
claramente los “picos” de
aceleración infinita producidos por
las discontinuidades encontradas en
las fronteras de los distintos
intervalos. Es verdad que una
aceleración infinita no podría
obtenerse nunca, ya que se
requerirían fuerzas infinitas, pero es
claro que las fuerzas dinámicas
serán muy grandes en estas
fronteras, y originarán esfuerzos de
alta intensidad y rápido desgaste.
FF II GG UU RR AA EEjj.. 11--22
Diseño de Levas 14
En la Figura Ej. 1-2 se muestra una función armónica simple aplicada al segmento de subida de
nuestro problema de diseño de leva.
Nótese que la función de velocidad es continua, ya que corresponde a la velocidad cero de los
detenimientos de cada extremo. Sin embargo la función aceleración no es continua. Es una función
cosenoide de medio período y tiene valores diferentes de cero al comienzo y al final. Así que hay
discontinuidades en la aceleración en cada extremo del intervalo creando picos infinitos de rapidez
de aceleración en los extremos de tal intervalo de bajada concluyendo de igual manera que para el
caso 1/1 en que es aceptable solo para bajas velocidades.
Tener en cuenta entonces que si bien las funciones armónicas son derivables al infinito, no tratamos
aquí con funciones individuales. La función de leva sobre todo el intervalo es una función pieza por
pieza constituida de varios segmentos. Las armónicas son aplicables en todos los casos en que
debemos obtener un movimiento de subida en 180º y bajada en 180º sin detenimientos. En este caso
particular la leva se convierte en una de tipo Excéntrico.
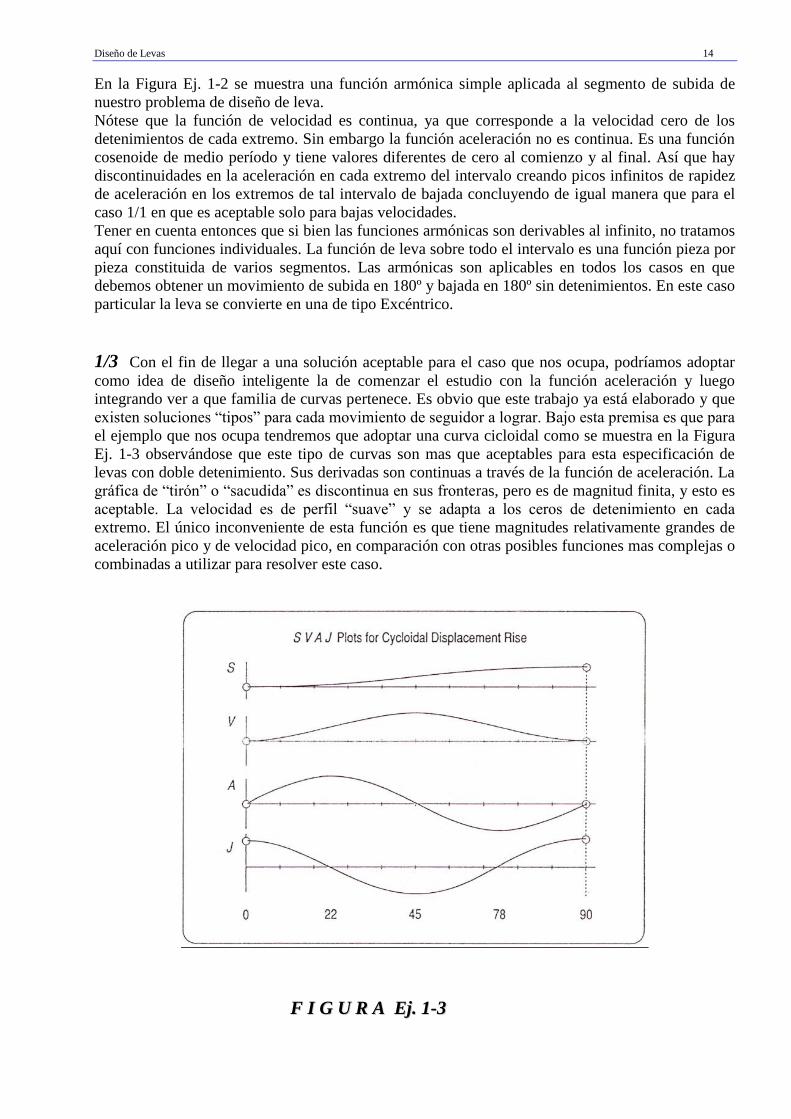
1/3 Con el fin de llegar a una solución aceptable para el caso que nos ocupa, podríamos adoptar
como idea de diseño inteligente la de comenzar el estudio con la función aceleración y luego
integrando ver a que familia de curvas pertenece. Es obvio que este trabajo ya está elaborado y que
existen soluciones “tipos” para cada movimiento de seguidor a lograr. Bajo esta premisa es que para
el ejemplo que nos ocupa tendremos que adoptar una curva cicloidal como se muestra en la Figura
Ej. 1-3 observándose que este tipo de curvas son mas que aceptables para esta especificación de
levas con doble detenimiento. Sus derivadas son continuas a través de la función de aceleración. La
gráfica de “tirón” o “sacudida” es discontinua en sus fronteras, pero es de magnitud finita, y esto es
aceptable. La velocidad es de perfil “suave” y se adapta a los ceros de detenimiento en cada
extremo. El único inconveniente de esta función es que tiene magnitudes relativamente grandes de
aceleración pico y de velocidad pico, en comparación con otras posibles funciones mas complejas o
combinadas a utilizar para resolver este caso.
FF II GG UU RR AA EEjj.. 11--33

Diseño de Levas 15
EJEMPLO 2: Estudiar el movimiento general y expresar las ecuaciones de una leva de martillo
ejemplificada en la Figura Ej. 2-1
Solución: Este tipo de mecanismos transforma un movimiento circular continuo en otro intermitente
de caída. Tanto la rueda o’ como la palanca giratoria ob que soporta el martillo se pueden
considerar como dos ruedas de engrane, en que la conducida (la palanca) tiene radio ob y sus
dientes de flanco recto (ab’ fuesen creados por la ruleta de radio o”b’ = 0b/2, al girar interiormente
a la circunferencia o, los dientes del piñón conductor serán epicicloidales engendrados por la misma
ruleta o” al girar exteriormente sobre la circunferencia de radio o’b’ = r (este perfil asegura un
mínimo roce y una marcha regular).
En la figura podemos observar que la circunferencia de base tiene un radio: o’b’ = r = E – R’
Y la circunferencia de cabeza o exterior: o’a’ = R = E – oa = E - R”
Debemos asegurar que la distancia entre los dientes ha de ser tal que al abandonar la palanca un
diente no tropiece en su caída con el inmediato posterior. Es así que si la caída fuese instantánea,
como la rueda C conduce a ab hasta el punto máximo b, el comienzo del perfil próximo podrá ser el
punto b’ y los dientes correspondientes los bb” y cb’. Pero la caída tiene un tiempo finito durante el
cual la rueda ha girado un cierto ángulo β al que corresponde un arco de circunferencia base tal
como e; este arco debe sumarse a b’b” para obtener la mínima separación teórica. Así es que si la
caída fuese recta:
H = ½ g t’² t’ = (2 h / g) ½
Pero como el martillo cae siguiendo el arco gg’ el tiempo real de caída se deduce de:
gg’ = γ L = ½ g t² t = (2 γ L / g) ½
en el cual, un punto b” de la rueda de velocidad angular ω habrá recorrido el ángulo β que vale en
radianes β = ω t = ω (2 γ L / g) ½ radianes. A este ángulo ha de agregarse el α dado por la
longitud de los dientes resultando como arco total b’d’. Pero este debe dividir exactamente a la
circunferencia de radio r, habrá de adoptarse corrientemente un Z = 2 π r / b’d’ = 360º / (α+ β)
Asimismo se puede calcular el período para el cual el martillo permanecerá estático sobre el yunque
el cual viene determinado por la magnitud del pequeño ángulo α’ de exceso = 360º - Z (α+ β) / Z
con su correspondiente tiempo de parada tp = α’ π / ω 180. Podríamos calcular también el
mínimo tiempo de parada aumentando la velocidad angular hasta un valor ω’ haciendo α’ = 0 y
sustituyendo β por su valor β’, que es menor.
El valor del arco bb’ viene dado por la altura que deseemos conseguir en el extremo b de la palanca
y por las dimensiones del diente.
FF II GG UU RR AA EEjj.. 22--11

Diseño de Levas 16
EJEMPLO 3: Obtener el perfil de una leva excéntrica la cual deberá manejar el movimiento de una
varilla que posiciona un elemento en un cierto momento de su cadena productiva.
La construcción mas simple de este dispositivo es hacer girar una leva de disco con movimiento
circular uniforme y sobre él hacer apoyar un vástago o varilla guiado por un simple rodillo.
El vástago seguirá el movimiento dado por la sucesiva diferencia de estos radios, en forma
rectilínea, siguiendo una ley periódica a predeterminar según las condiciones de movimiento de la
máquina.
3/1 Por ejemplo, si el movimiento necesario es un alternativo uniforme sin paradas o
detenimientos intermedios llegaremos a la solución deseada a través de una leva excéntrica de
corazón la cual es mostrada en la Figura Ej. 3-1 (a)
La ecuación general horaria del vástago para un movimiento uniforme será:
X = f (t) = v t = ρ siendo v la velocidad cte. de su movimiento y x el desplazamiento
longitudinal de los radios extremos ρ para un giro de la leva efectuado en el tiempo t.
La ecuación horaria de la leva girando con una vel. ang. cte. ω, es:
θ = f(t) = t ω y eliminando la variable t en el sistema de ecuaciones se tiene
ρ = v t = v θ / ω y v / ω = cte. = K ==► ρ = K θ
La diferencia de los radios es función directa del ángulo θ girado de la leva. Interpretada
analíticamente esta ecuación nos expresa en coordenadas polares una curva cuyo radio vector crece
proporcionalmente al ángulo descripto, esto es una espiral de Arquímedes que será el perfil que
presente la leva. En coordenadas cartesianas responde a la ecuación de una recta que pasa por el
origen, cuyo coeficiente angular es v, coeficiente angular que equivale cinemáticamente a la
velocidad constante del movimiento uniforme.
Se obtiene así el medio perímetro, que se completa por la otra mitad, simétrico a este. Los dos
vértices del perfil se redondean para facilitar el rodamiento del seguidor, aunque con ello se altere la
ley del movimiento al final de cada semi-período.
FF II GG UU RR AA EEjj.. 33--11
El trazado geométrico del perfil puede verse en
la Figura Ej. 3-1 (b). Dada la longitud de la
carrera h a obtener y la velocidad deseada v,
nos basta calcular el ángulo α cuya tangente es
v para construir el triángulo abc, cuyo cateto ab
es la mitad del desarrollo de la circunferencia
base de la leva, cuyo radio se deduce de:
V = Tg α = h / r π r = h / π v
Sobre esta circunferencia base se tomarán en
sentido radial las ordenadas 1-1', 2-2', 3-3', etc.
En los puntos correspondientes a los arcos
desarrollados, 0-1, 0-2, 0-3, etc.

Diseño de Levas 17
3/2 Si se desea que el movimiento rectilíneo del vástago necesario fuera uniforme, pero con
distintas velocidades en uno y otro sentido (un típico mecanismo de retroceso rápido en los cuales
solo se utiliza la carrera de avance), el triángulo será asimétrico, como asimismo la leva, aunque sus
dos perfiles serían espirales de Arquímedes con distintos coeficientes para sus ecuaciones
respectivas (Figura Ej. 3-2).
3/3 Si lo que se desea es alcanzar un movimiento de salida de la varilla rectilíneo alternativo
uniformemente variado la ley o curva del movimiento viene dada por arcos de parábola enlazados
en sus tangentes extremos, y el trazado gráfico de la curva es en todo análogo al anterior. Basta
partir de las ecuaciones que nos definen el movimiento a obtener para representarlas gráficamente a
la escala adecuada y trasladar las ordenadas correspondientes a cada punto sobre la circunferencia
base de antemano determinada.
Representada la ley en los ejes coordenados tendríamos para la primera rama oa de la curva una
ecuación parabólica del tipo:
Y = 1/2 P ( X + X1²) ecuación de una parábola con el vértice hacia abajo, Tg al eje x y simétrica
con respecto a oY que dista del eje de las y una distancia K igual al semidesarrollo de la
circunferencia base
La rama a7' tiene por ecuación Y = - 1/2 P X² + K, parábola de eje vertical simétrica con
respecto al eje de las y y cuyo vértice intercepta a este eje a una distancia 7-7' igual la cte. K , a
su vez igual a la carrera máxima de la varilla. (Al ser negativo el segundo miembro indica que el
vértice esta en la parte superior). De esta forma se facilita el enlace de las distintas curvas, haciendo
para ello las dos ramas tangentes en un punto a, cuya posición debemos imponer de antemano.
Resumiendo estas dos parábolas son representativas de un movimiento uniformemente acelerado la
primera y de otro uniformemente retardado la segunda, repitiéndose estos movimientos en la varilla
pero en sentido inverso en la segunda mitad del giro de la leva.
Carrera de ascenso
o subida = 0-1-2-5 = 5/6
Carrera de descenso
o retroceso = 5-6 = 1/6
FF II GG UU RR AA EEjj.. 33--22

Diseño de Levas 18
EJEMPLO 4: Obténganse las ecuaciones generales necesarias para describir el diagrama de
desplazamientos de una leva que en función de su utilización debe subir con movimiento
parabólico, desde un estado de reposo hasta otro, de tal manera que la elevación total es L y el
ángulo total de rotación de la leva es β.
Se deberá graficar el diagrama de desplazamiento y los correspondientes a sus tres primeras
derivadas con respecto a la rotación de la leva.
Solución: Como se ha explicado en el punto 4-b para describir este movimiento se necesitan crear
dos parábolas que se encuentren en un punto de inflexión que, en este caso, se toma a la mitad del
desplazamiento.
Para la primera mitad del movimiento se elige la ecuación general de una parábola.
Y = A θ² + B θ + C
Que tiene las derivadas
Y´ = 2 A θ + B Y” = 2 A Y”´ = 0
Para igualar de manera apropiada la posición y la pendiente con las de la detención anterior, en
θ = 0 se tiene que Y(0) = Y´(0) = 0, o sea B = C = 0
Si examinamos el punto de inflexión, en θ = β / 2 se desea que Y = L / 2 entonces
Y = A θ² + B θ + C ===► A = 2L / β²
Así pues para la primera mitad del movimiento parabólico, las ecuaciones son:
Y = 2 L (θ/β) ² Y´ = 4 L θ / β² Y” = 4 L / β² Y”´ = 0
Se puede observar que la pendiente máxima ocurre en el punto de inflexión, en donde θ = β / 2
Y vale Y´max = 2 L / β
Por lo que respecta a la segunda mitad del movimiento, se vuelve a partir de las ecuaciones
generales pero con las siguientes condiciones: θ = β, Y = L , Y´ = 0
En donde L = A β² + B β + C
0 = 2 A β + B Puesto que la pendiente debe igualarse con la de la primera parábola en θ = β / 2
2 L / β = 2 A β / 2 + B
Resolviendo
A = - 2 L / β² B = 4 L / β C = - L

Diseño de Levas 19
Cuando estas constantes se sustituyen en las formas generales, se obtienen las ecuaciones para la
segunda mitad del movimiento parabólico
Y = L [1 – 2 ( 1 - θ / β ) ²]
Y´ = 4 (L / β) ( 1 - θ / β)
FF II GG UU RR AA EEjj.. 55--11

Diseño de Levas 20
EJEMPLO 5: Una leva de placa con seguidor de movimiento alternativo se impulsará con un motor
de velocidad constante a150 rpm. El seguidor debe partir de una detención, acelerar hasta una
velocidad uniforme de 25 pulg/s, mantener esta velocidad a lo largo de 1,25 pul de subida,
desacelerar hasta la parte superior de la elevación, retornar y luego quedar en detención por 0,1 s.
La elevación total será de 3 pulg.
Se deberán determinar las especificaciones completas del diagrama de desplazamiento
Solución: La velocidad del eje de entrada es ω = 150 rpm = 15.708 rad/s
Se puede hallar la pendiente del segmento de velocidad uniforme haciendo:
La velocidad del seguidor será V = Y´ ω ==► Y´ = 1,25 pulg/s / 15.708 rad/s = 1,592 pulg/rad
Y puesto que esta se mantiene constante en el curso de 1,25 pulg de subida, la rotación de leva en
este segmento es β2 = L2 / Y´ = 0,785rad = 45º
Del mismo modo basándose en la igualdad ω = 150 rpm = 15.708 rad/s se puede hallar la
rotación de la leva durante la detención final β5 = 0,1 s / 15.708 rad/s = 1,047 rad = 60º
Con todos estos datos podemos hacer un esquema de los puntos de arranque del diagrama de
desplazamiento, no necesariamente a escala, sino solo para concebir las necesidades de movimiento
Esto da los perfiles generales
ilustrados por los trazos gruesos
de la Figura (a). Las secciones
con líneas delgadas no son
conocidas con exactitud, pero se
dibujan planteando una solución
posible contemplando contornos
suaves. Con base en la
pendiente del diagrama de
desplazamiento se dibuja la
curva de “velocidad” Figura (b),
y a partir de su pendiente se
encuentra la curva de
“aceleración”, Figura (c).
Ahora usando estos gráficos
aproximados, se comparan las
curvas del movimiento deseado
con las diversas curvas estándar
de la Figura 6 (página 7), con el
fin de seleccionar un conjunto
apropiado de ecuaciones para
cada segmento de la leva.
FF II GG UU RR AA EEjj.. 55--11

Diseño de Levas 21
En el segmento AB se puede adoptar una curva semicicloidal la cual cumple una media subida, una
curva de pendiente apropiada y la “aceleración” cero necesaria en ambos extremos del segmento.
Para el segmento CD se puede adoptar también la curva anterior, sin embargo para mantener los
“tirones” acotados es mejor adoptar una curva tipo semiarmónica y de forma similar acorre con el
segmento DE para el cual existen varias posibilidades de solución adoptando en este caso las de
retorno armónico modificado.
El siguiente paso es hallar los valores para los parámetros desconocidos de las ecuaciones del
movimiento: L1, L3, β1, β3 y β4. Para esto debemos igualar los valores en cada frontera diferente
a cero de las curvas de las curvas de las derivadas. Por ejemplo, para igualar las “velocidades” en B,
es preciso igualar el valor de Y´ de la fórmula del movimiento semicicloidal en θ / β = 1 (su
extremo derecho) con el valor de Y´ en el segmento BC,
Y´b = 2 L1 / β1 = L2 / β2 = 1,25 pulg / 0,785 rad = 1,592 pulg / rad
O bien, L1 = 0,796 β1
Análogamente para el punto C se trabaja igualando el segmento BC con la ecuación del movimiento
semiarmónico en θ / β = 0 (su extremo izquierdo)
Y´c = L2 / β2 = π L2 / 2 β3 = 1,592 pulg / rad
O bien, L3 = 1,013 β3
Para igualar las “aceleraciones” en el punto D, se iguala el valor de Y” de la ecuación semiarmónica
en θ / β = 1 (su extremo derecho) con Y” de la ecuación del movimiento armónico modificado en θ / β = 0 (su extremo izquierdo) dando:
Y”d = - π² L3 / 4 β² 3 = - π² L4 / β² 4 y como L3 = 1,013 β3 =====► β3 = 0,0844 β²4
Para lograr una compatibilidad geométrica se deberá garantizar que:
L1 + L3 = L4 - L2 = 1,75 pulg y β1 + β3 + β4 = 2 π – β2 – β5 = 4,451 rad
Ahora estamos en condiciones de resolver el sistema de 5 ecuaciones con las 5 incógnitas que restan
y así proceder a un trazado exacto del diagrama de desplazamiento y si se desea de sus derivadas.
Los valores finales son los siguientes:
L1 = 1,264 pulg L2 = 1,250 pulg L3 = 0,486 pulg L4 = 3 pulg L5 = 0
β1 = 1,589 rad 91,04º β2 = 0,785 rad 45º β3 = 0,479 rad 27,46º
β4 = 2,382 rad 136,50º β5 = 1,047 rad 60º
Related Documents











