Cooperative lane changing and forced merging model Moshe Ben-Akiva, Charisma Choudhury, Tomer Toledo, Gunwoo Lee, Anita Rao ITS Program January 21, 2007

Cooperative lane changing and forced merging model Moshe Ben-Akiva, Charisma Choudhury, Tomer Toledo, Gunwoo Lee, Anita Rao ITS Program January 21, 2007.
Jan 03, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Cooperative lane changing and forced merging model
Moshe Ben-Akiva,
Charisma Choudhury, Tomer Toledo,
Gunwoo Lee, Anita Rao
ITS ProgramJanuary 21, 2007

2
Outline
• Introduction
• Lane changing– Model structure– Estimation results – Validation results
• Acceleration research plan

3
Introduction

4
Background• Objective
– Develop and test a model for freeway merges that explicitly incorporates cooperative behavior and forced merging
• Tasks– Specify merging model– Estimate the model with I-80 trajectory data – Implementation– Aggregate calibration and validation
• Extension– Integrate acceleration decisions

5
Merging Behavior• Vehicle merging
– Lane changing throughgap acceptance
– Models fail in dense traffic
• Additional merging mechanisms– Lag vehicle may provide courtesy– Vehicle may force a lane change
• Merging mechanism affects– Gap acceptance– Acceleration decisions
Lag
Subject
6
Lane Changing

7
Combined Lane Changing Model
normal courtesy
change no
change change
forced
change
Merging Mechanism
Gap Acceptance
nochange
nochange Same
AdjacentGap
Same AdjacentGap
MLC to target lane
New AdjacentGap
New AdjacentGap

8
Combined Lane Changing Model: Detailed Structure
Target Lane
InitiateCourtesy Merging
Courtesy/Forced Gap Acceptance
MLC to target lane
adjacent gaps acceptable
adjacent gaps not acceptable
initiate courtesymerge
change no
change change
initiate forced merge
nochange
nochange
change
InitiateForcedMerging
Normal Gap Acceptance
anticipated gapGap Anticipation
Same AdjacentGap
NewAdjacentGap
Same Adjacent
Gap
NewAdjacentGap
do not initiate courtesy merge
do not initiate forced merge

9
Available Gap
• Adjacent gap changes if either lead or lag vehicle changes
Subjectvehicle
Leadvehicle
Lagvehicle
Adjacent gap
Lead gapLag gap
Traffic direction

10
Choice of Merging Mechanism
• Normal gaps evaluated first
• Normal gaps not acceptable– Driver anticipates future gap
• Reflects the courtesy or discourtesy of the through vehicle
• Latent time horizon
– Anticipated gap acceptable • Courtesy merging
• Driver initiates lane change
n

11
Choice of Merging Mechanism (2)• Anticipated gap not acceptable
– Driver considers initiating forced merging• Unacceptable gaps may delay the courtesy/forced
lane change– Driver remains in initiated courtesy/forced
merging state

12
Execution of the Merge
• Driver evaluates lead and lag gaps
• Changes lanes if both gaps are acceptable
• Acceptable gap– available gap >= critical gap
• Smaller critical gaps for courtesy and forced lane changes
13
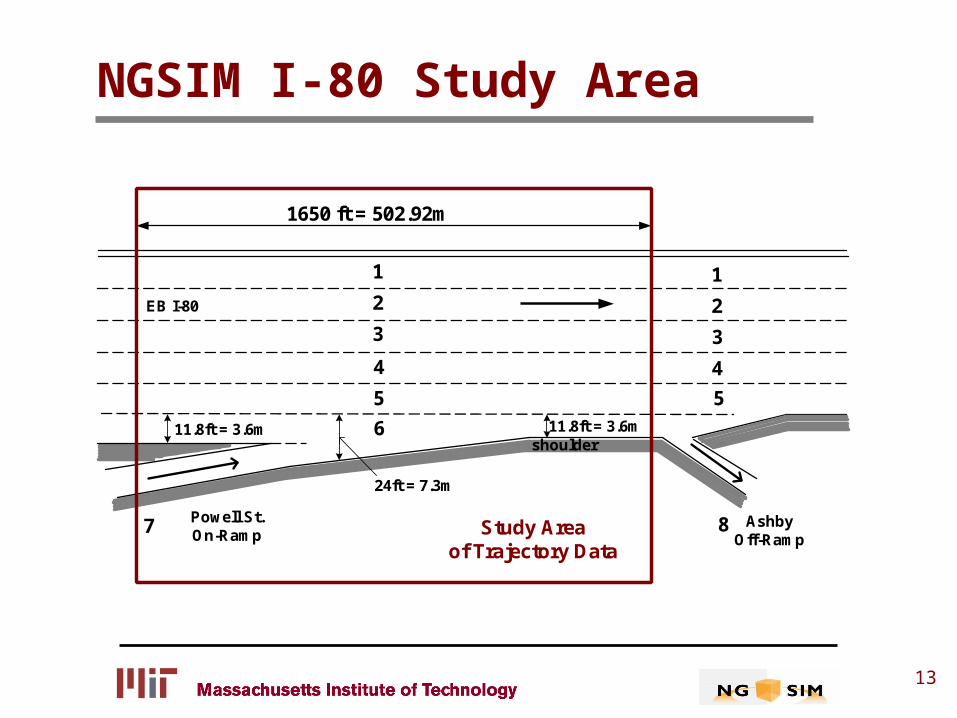
NGSIM I-80 Study Area
1
6
5
4
3
2
87
1650 ft = 502.92m
3
4
5
Powell St.On-Ramp
AshbyOff-Ramp
EB I-80
1
2
Study Areaof Trajectory Data
11.8ft = 3.6m
24ft = 7.3m
11.8ft = 3.6mshoulder
14
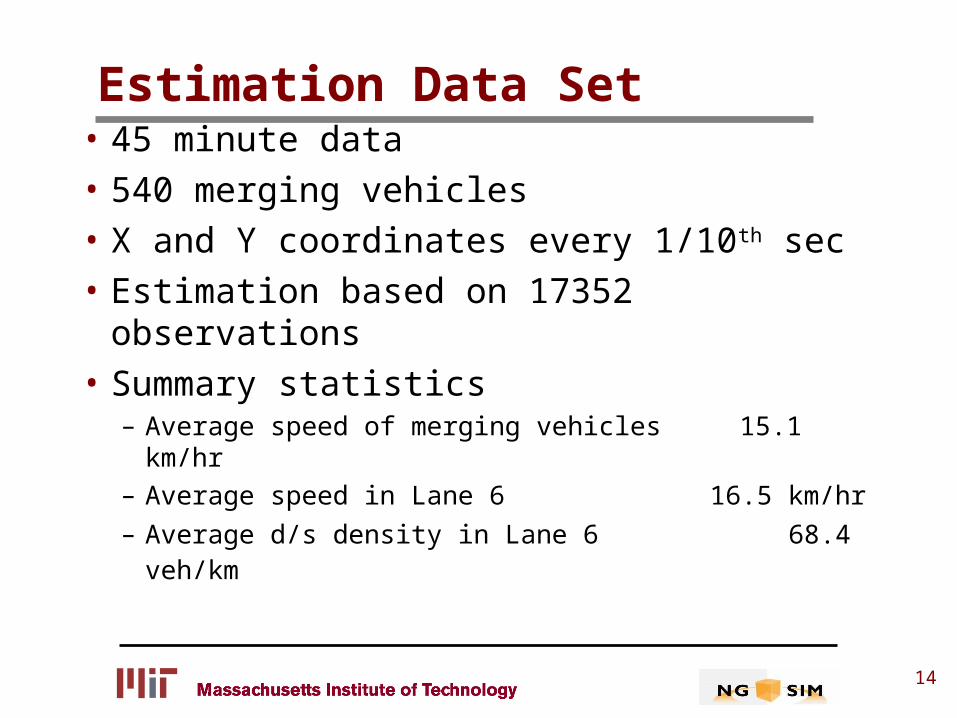
Estimation Data Set• 45 minute data
• 540 merging vehicles
• X and Y coordinates every 1/10th sec
• Estimation based on 17352 observations
• Summary statistics– Average speed of merging vehicles 15.1 km/hr
– Average speed in Lane 6 16.5 km/hr
– Average d/s density in Lane 6 68.4 veh/km

15
Estimation Results• Variables affecting critical gap
– Average speed of the mainline– Speeds of the lead and lag vehicle– Acceleration of the lag vehicle– Remaining distance to MLC point
• Functional form and variables influencing the critical gaps assumed to be the same
• Intercepts differ for normal, courtesy and gap acceptance

16
Estimation Results
0
1
2
3
4
5
6
7
8
-5 -4 -3 -2 -1 0 1 2 3 4 5
Relative lag speed(m/sec)
Mea
n L
ag C
riti
cal G
ap (
m)
Normal
Forced
Courtesy
• Median critical lag gap variation with relative lag speed - Effect of type of merge
Med
ian
cri
tica
l lag
gap
(m
)

17
Estimation Results (2)• Median critical lag gap variation with remaining distance - Effect of driver heterogeneity

18
Model Comparison• Tested against a single
level gap acceptance model– No explicit courtesy or
forced merge component
2(0.95,25)60.08 37.65LR
Model Likelihood Parameters
Normal only -1639.69 17
Full model -1609.65 42
Reject normal only model at 95% confidence
19
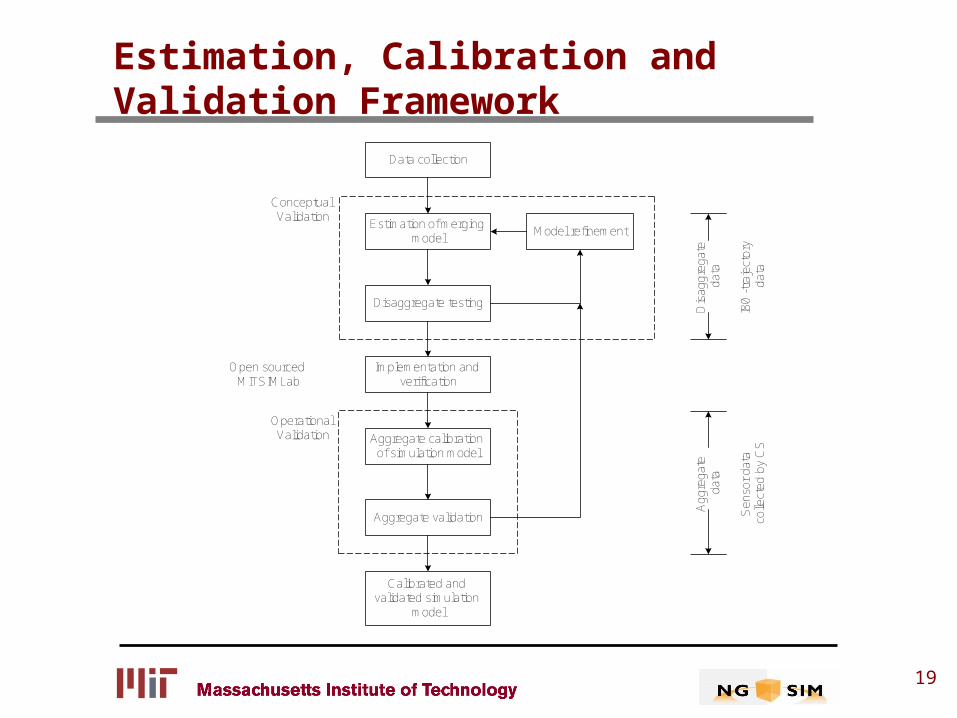
Estimation, Calibration and Validation Framework
Estimation of merging model
Data collection
Aggregate calibration of simulation model
Disaggregate testing
Model refinement
Dis
aggr
egat
e da
taA
ggre
gate
da
ta
Aggregate validation
Calibrated and validated simulation
model
Open sourced MITSIMLab
I-
80
traj
ecto
ry
data
Sen
sor
data
co
llect
ed b
y C
S
Implementation and verification
Operational Validation
Conceptual Validation

20
Calibration and Validation Data
1
6
5
4
3
2
2100 ft (640 m)
3
4
5
Ventura On-Ramp
1
2
Study Areaof Trajectory Data
Lankershim Off-ramp
698 ft (213 m)
• US 101 trajectory data – Distinct auxiliary lane – Higher average speed
Lane 6: 47.1km/hr Lane 5: 35.2 km/hr
• ‘Synthetic’ sensor data created from trajectory data to
replicate aggregate counts and speeds• Transferability test to identify most sensitive parameters• Compared against default MITSIMLab models

21
Validation Results
Previous Model
Combined Model
PercentImprovement
RMSE (vehicles/5 mins) 20.91 13.22 58.18%
RMSPE 10.81% 7.52% 43.83%
Comparison of Lane-Specific Counts
Comparison of Lane-Specific Speeds
Previous Model
Combined Model
PercentImprovement
RMSE (mph) 12.81 8.82 45.17%
RMSPE 29.73% 22.26% 33.58%

22
Validation Results (2)
0
10
20
30
40
50
60
0 50 100 150 200 More
Remaining Distance (m)
% o
f M
erg
es Observed
Combined
Previous
Comparison of Location of Merges

23
Acceleration Research Plan
24
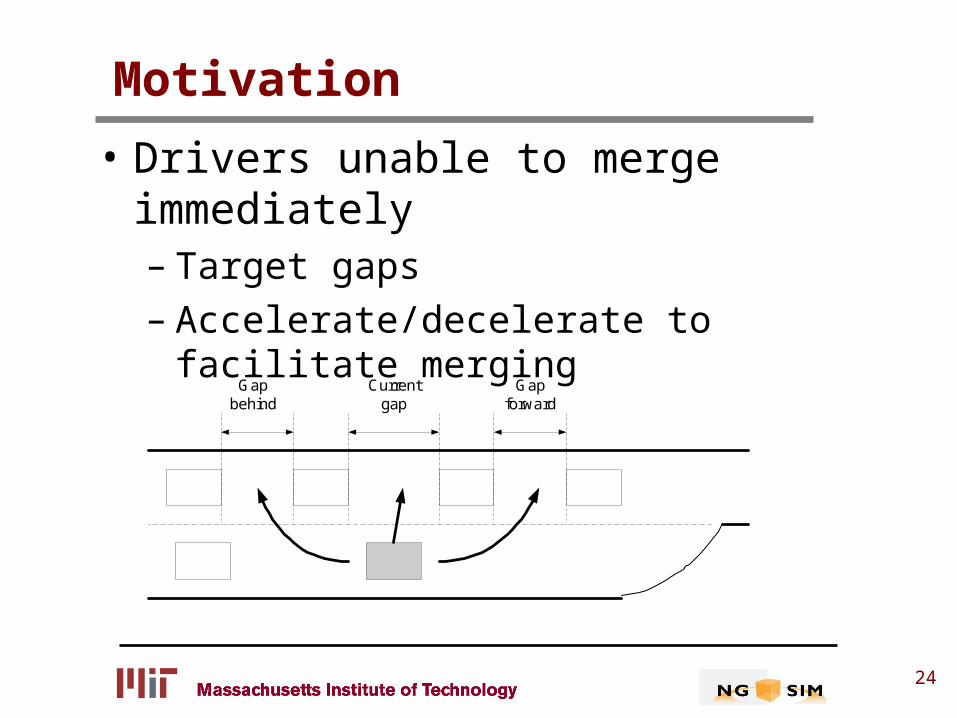
Motivation
• Drivers unable to merge immediately– Target gaps– Accelerate/decelerate to facilitate merging
Gapbehind
Gapforward
Currentgap

25
Extended Model
• Incorporate– Target gap selection – Acceleration to facilitate merging
• Challenge– Only acceleration observed
• Unobserved target gap choice
• Unobserved acceleration stimuli
– Modeled as latent variables

26
Extended Model Framework
Target Lane
AnticipatedGap Acceptance
Lane Action
MLC to target lane
existing gaps acceptable
existing gaps not acceptable
anticipated gap acceptable
anticipated gap not acceptable
change
initiate change through courtesy
nochange
change
initiate forced merging
nochange
nochange
change
do not initiate forced merging
Courtesy/Forced Merging
Gap Acceptance
anticipated gapGap Anticipation
gap 1 gap 2 gap k
acc. acc.
...
acc.
Target Gap
Acceleration acc. acc. acc.acc. acc.
Same Adjacent
Gap
Same Adjacent
Gap
New Adjacent Gap New Adjacent Gap

27
Target Gap Selection
• Conditional on the decision of not initiating a courtesy/forced merge
• Utility of gap j for individual n at time t
Tj P j jnt nt n nt
P
j
U =β X +α υ +ε
j adjacent,backward,forward
β =coefficient of explanatory variables for gap j
α =coefficient of individual specific error term for gap j
A
E D BC

28
Target Gap Selection (2)
• Candidate explanatory variables– Size of gap– Trend of gap– Distance traversed to be adjacent to the gap

29
Background
• Our previous research in modeling acceleration– Subramanian (1996)
• Integrated car-following and free-flow model
– Ahmed (1999)• Non-linear stimulus and different reaction time for
sensitivity and stimulus
– Toledo (2003)• Acceleration models for stay in lane, lane change and
target gap

30
Proposed Acceleration Model
• The driver responds to different stimuli depending on merging mechanism and target gap choice
• Current leader may constrain desired acceleration
n n n nresponse t sensitivity t stimulus t

31
Proposed Acceleration Model (2)
1. Lane changing acceleration– Existing gaps are acceptable, car-following the
new leader
2. Target gap acceleration– Improve position w.r.t. to lead and lag vehicles of
target gap
3. Initiated courtesy/forced merging– Improve position in current lane w.r.t. lag vehicle
in target lane

32
• Car-following acceleration or deceleration based on relative speed of leader in target lane
1. Lane Changing Acceleration
0
Rn t n
lc ,i ,acc leadnt
lc ,int
lc ,i ,decnt
a if Va
a otherwise
A
*
R R
leadnt
R Rn n
where,
V is the relative speed of the leader at time t
is the reaction time, ~ N( , )
33
1. Lane-changing Acceleration (2)
• Variables affecting acceleration/deceleration functions– speed of subject vehicle
– spacing with lead vehicle

34
2. Target Gap Acceleration Models
• General Structurea. Constrained regime
b. Unconstrained regimes
- based on time headway
Rn
c *nt nn t
nucnt
a if h ha t
a otherwise
R R
* *
n
R Rn n
* *n n h h
where,
h is the headway with the leader in the current lane
is the reaction time, ~ N( , )
h is the headway threshold, h ~ N( , )

35
2a. Constrained Regime
• Car-following acceleration or deceleration based on relative speed of current front vehicle
• Variables– speed of subject vehicle, spacing with front vehicle,
roadway conditions (e.g. density) etc.
• Same functional form for forward, backward and adjacent gaps
A *

36
2b. Unconstrained Regime
a. Forward gap acceleration - function of desired and
current positions, relative
speed with leader etc.
b. Backward gap acceleration - function of desired
and current positions,
subject speed etc.
A
*
Forward gap
Distance to desired position
A
Backward gapDistance to desired
position

37
2b. Unconstrained Regime (2)
c. Adjacent gap acceleration - function of desired and current positions,
relative speed of lag etc.
A
*
Adjacent gap
Target lane lagspace headway

38
3. Initiated Courtesy/Forced Merging
• Similar to adjacent gap acceleration• Functional form and parameters may differ• Variables
– desired and current positions, relative speed of lag etc.
A
*
Adjacent gap
Target lane lagspace headway

39
• Maximum likelihood technique– Joint estimation of all model parameters
• Data– NGSIM I-80 trajectory data
– May be enriched by US 101 trajectory data
Estimation
1
6
5
4
3
2
87
1650 ft = 502.92m
3
4
5
Powell St.On-Ramp
AshbyOff-Ramp
EB I-80
1
2
Study Areaof Trajectory Data
11.8ft = 3.6m
24ft = 7.3m
11.8ft = 3.6mshoulder
1
6
5
4
3
2
2100 ft (640 m)
3
4
5
Ventura On-Ramp
1
2
Study Areaof Trajectory Data
Lankershim Off-ramp
698 ft (213 m)

40
• Implemented in MITSIMLab– Compared against default MITSIMLab models
• Data– US 101 ‘synthetic’ sensor flows and speeds
Calibration/Validation
1
6
5
4
3
2
2100 ft (640 m)
3
4
5
Ventura On-Ramp
1
2
Study Areaof Trajectory Data
Lankershim Off-ramp
698 ft (213 m)

41
Alternative Structure 1
Target Lane
AnticipatedGap Acceptance
Lane Action
MLC to target lane
existing gaps acceptable
existing gaps not acceptable
anticipated lag gap acceptable
anticipated lag gap not acceptable
change
initiate change through courtesy
nochange
change
initiate forced merging
change
Courtesy Merging
Gap Acceptance
forward gap
acc.acc.
Target Gap
Acceleration acc. acc. acc.acc.
backward gap
acc.
nochange

42
Alternative Structure 2
Target Lane
AnticipatedGap Acceptance
LaneAction
MLC to target lane
existing gaps acceptable
existing gaps not acceptable
anticipated lag gap acceptable
anticipated lag gap not acceptable
change
initiate change through courtesy
nochange
change
initiate forced merging
nochange
change
CourtesyMerging
Gap Acceptance
forward gap
acc.acc.Acceleration acc.
acc. acc.acc.
backward gap
acc.
adjacent gap
nochange
acc.
do initiate forced
mergingForcedMerging
TargetGap
Related Documents











