Conflict Areas for Macroscopic Models in Dynamic Traffic Assignment Daniele Tiddi, Bojan Kostic, Guido Gentile DICEA, Sapienza University of Rome Abstract Intersections are the most critical elements of road networks, especially in urban contexts. In the representation of junctions for macroscopic DTA models, the usual assumption is that every conflict among intersecting traffic streams of different manoeuvres is fully solved by traffic signals. This simplifies the simulation of intersections, given that only merging and diversions are to be reproduced, and most DTA models are capable of addressing these basic topologies. However, quite often in practice we have intersecting manoeuvres that comply with some precedence and/or gap-acceptance rule, even in signalized junctions. These phenomena are very well tackled by micro-simulation models, while limited research has been produced to successfully and efficiently represent nodes with conflict areas in macroscopic models for Dynamic Traffic Assignment. This article addresses the above issue, providing a new formulation for conflicting traffic streams in the context of the General Link Transmission Model. To this end, the merging model with priorities is extended by associating a capacity to each manoeuvre, while the scarce resource to be split becomes the time of the conflict area. A specific parameter to reproduce different driver behaviour from polite to aggressive is also introduced. The model has been implemented in the software for Dynamic Traffic Assignment called TRE. Numerical results are presented to show how the model works for different combinations of flows, capacities and priorities. Keywords: junctions with conflicting manoeuvres, Link Transmission Model, Dynamic Network Loading, turn priorities, polite vs. aggressive driver behavior. 1 Introduction Dynamic Traffic Assignment (DTA) has recently received a considerable attention as an effective tool for real-time traffic management [Gen11]. Reliable DTA models are necessary for realistic estimation of current traffic states and prediction of traffic conditions in the near future. The node model plays a crucial role in macroscopic DTA, since most delays actually occur at intersections, especially in urban networks. A conflict area model is meant to simulate in 493

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Conflict Areas for Macroscopic Models in
Dynamic Traffic Assignment
Daniele Tiddi, Bojan Kostic, Guido Gentile
DICEA, Sapienza University of Rome
Abstract
Intersections are the most critical elements of road networks, especially in urban contexts. In
the representation of junctions for macroscopic DTA models, the usual assumption is that
every conflict among intersecting traffic streams of different manoeuvres is fully solved by
traffic signals. This simplifies the simulation of intersections, given that only merging and
diversions are to be reproduced, and most DTA models are capable of addressing these basic
topologies. However, quite often in practice we have intersecting manoeuvres that comply
with some precedence and/or gap-acceptance rule, even in signalized junctions. These
phenomena are very well tackled by micro-simulation models, while limited research has
been produced to successfully and efficiently represent nodes with conflict areas in
macroscopic models for Dynamic Traffic Assignment. This article addresses the above issue,
providing a new formulation for conflicting traffic streams in the context of the General Link
Transmission Model. To this end, the merging model with priorities is extended by
associating a capacity to each manoeuvre, while the scarce resource to be split becomes the
time of the conflict area. A specific parameter to reproduce different driver behaviour from
polite to aggressive is also introduced. The model has been implemented in the software for
Dynamic Traffic Assignment called TRE. Numerical results are presented to show how the
model works for different combinations of flows, capacities and priorities.
Keywords: junctions with conflicting manoeuvres, Link Transmission Model, Dynamic
Network Loading, turn priorities, polite vs. aggressive driver behavior.
1 Introduction
Dynamic Traffic Assignment (DTA) has recently received a considerable attention as an
effective tool for real-time traffic management [Gen11]. Reliable DTA models are necessary
for realistic estimation of current traffic states and prediction of traffic conditions in the near
future.
The node model plays a crucial role in macroscopic DTA, since most delays actually occur
at intersections, especially in urban networks. A conflict area model is meant to simulate in
493
this framework a junction point where multiple flow streams intersect each other without
signal regulation, with enough realism to correctly reproduce travel times and turn flows. A
typical junction has three different types of conflicts: merging, diversion and crossing. In this
paper we concentrate on crossing conflicts.
In most traffic assignment models, intersections are topological elements with no space
dimension, i.e. no time or cost is spent by the users to cross them; at most, a turn delay is
considered. Due to the common assumption of arc cost separability, the reciprocal influence
among crossing flows is neglected, even if they cross the same junction at the same time.
Some models consider a total capacity for intersection nodes, with the unrealistic
assumption that the total volume crossing the node contributes to its impedance and the
impedance is the same for all flows. In real traffic, vehicles interact only at specific conflict
points, usually between two maneuvers, that are delayed increasingly to the opposite flow
volume.
In the Highway Capacity Manual (HCM), which is often used by traffic engineers to
evaluate the level of service of an intersection, a left turn adjustment factor is introduced
depending on the level of protection and on the effective opposing flow. In microscopic
models, a gap-acceptance approach is typically implemented, as is the case of Vissim
[PTV10]. This is based on the critical gap value, which represents the minimum average
headway between vehicles of the opposite stream that will be accepted by drivers to cross
the conflict point.
Macroscopic models avoid to reproduce interactions among individual vehicles by
adopting a representation of traffic as a mono-dimensional partly compressible fluid, to gain
simulation robustness and computation runtimes. A recent approach to improve the
simulations of conflict points in DTA is based on representing junctions as mini-networks
[Cor12] and [Tid12]. This spatial intersection model introduces dummy nodes and links to
simulate conflict areas with internal constraints. Our model further develops this approach.
The proposed conflict area model, preliminary validated against a microsimulator
(Vissim), has proved to be successful in reproducing with suitable accuracy several different
situations, including: non-controlled junctions, junctions with different kinds of precedence
or yield-of way, such as: two-way stop junctions, two-way yield junctions, and four-way stop
junctions. It can also be used with roundabouts and junctions equipped with traffic lights.
Given this flexibility, it was also implemented in the node model of the General Link
Transmission Model (GLTM), which is the propagation engine of the software TRE - Traffic
Realtime Equilibrium, by SISTeMA.
The paper is organised as follows. The second chapter provides the mathematical
formulation of the model. It also shows how conflict areas can be coded in Visum – the travel
demand modelling software by PTV Group. The third chapter demonstrates the validation of
the model through numerous examples and different scenarios. Last chapter provides
concluding remarks.
MT-ITS 2013
494

2 Model Description
The model aims at representing the effects of different factors influencing each turning
movement, and that thus affect the efficiency of the junction. It should be mentioned that
there are no restrictions in the number of conflict areas in a junction, or in the number of
conflict areas encountered (in a specific order) by one turn.
Mathematical Formulation 2.1
The notation used to formulate the model is presented in the Table 1 below.
Table 1: Notation and description of used terms
Notation Description
N the set of nodes
,i j NÎ generic nodes
A N NÎ ´ the set of arcs
,a b AÎ generic arcs
[ ]a a N++ = Î a AÎ
[ ]a a N-- = Î
a AÎ
( , )G N A= graph, representing the road network
Y A AÎ ´ the set of turns, representing the permitted manoeuvres
[ ]iY Y i Y= Í i NÎ
y YÎ generic turn
[ ]i i A++ = Í the forward star of node
i NÎ
, { }:i a A a i+ -= Î =
[ ]i i A-- = Í the backward star of node
i NÎ
, { }:i a A a i- += Î =
[ ]y y A++ = Î
y YÎ
[ ]y y A-- = Î
y YÎ
C the set of conflict areas
iC the set of conflict areas of
i NÎ
c CÎ generic conflict area
cY
c CÎ
rem
cY
c CÎ
yk the capacity of turn
y YÎ
yr the capacity reduction factor of turn
y YÎ
send
yq
y YÎ
recvyq
y YÎ
remyq
y YÎ
yq the actual flow
y YÎ
yp the priority factor of turn
y YÎ
[0,1]ca Î the driving behaviour parameter of conflict area
c CÎ
Conflict Areas for Macroscopic Models in Dynamic Traffic Assignment
495

Notation Description
cr the capacity reduction factor of conflict area c CÎ
rem
cq
c CÎ
Note that most of these variables are temporal profiles, i.e. functions of times. However,
the conflict area model is a particular specification of the node model in the Link
Transmission Model, which is as usual solved for each instant (or time interval). For this
reason there is no need to make explicit reference to the current instant.
The proposed model is an iterative process where the remaining demand is possibly
assigned to the remaining supply. All variables with rem as a superscript refer to the current
status of the iterative process.
The model introduces a reduction factor for the capacity of each turn; these can be
asymmetrical, due to different prudential approach to the junction, decrease in speed, safety
considerations, and type of control. The model takes also into account the general loss of
efficiency in the usage of the junction due to the presence of the conflict area; this is provided
through a reduction factor that is applied to the time share of the conflict area itself (that is
the resource to split among manoeuvres).
Then, turn priority factors are included, in a way that each turn gets proportional share of
remaining time of the conflict area (also depending on turn capacities).
Finally, vehicle behaviour is modelled through a coefficient that represents the
“politeness” vs the “aggressiveness” of the drivers regarding the possibility of occupying the
conflict area, even when there is no available space for them downstream due to queue
spillback (represented in our case by a limited receiving flow). This results in blocking the
conflict area with a wasting of its available time.
The mathematical formulation of the model is presented below.
:rem
c cq r=
: (1 ) min{ , }rem send send recv
t c t c t tq q q qa a= × + - ×
:rem
c cT T=
do until rem
cT =Æ or 0rem
cq =
for each rem
ct TÎ
min ,
remc
rem rem t t tt t t t c
u u u
u T
qp k r
l k r qp k r
Î
ì üï ï× ×
= × × ×í ý× ×ï ï
î þå
:t t tq q l= +
:rem rem
t t tq q l= -
MT-ITS 2013
496

:rem rem tc c
t t
lq q
k r= -
×
if 0rem
tq = then : { }rem rem
c cT T t= -
next t
loop
: (1 ) min , ;1recv
tt c c t c t
t
qq t T q q
qa a
ì ü= - × " Î × + ×í ý
î þ
The above procedure can be synthetized in the following Conflict Area Model:
( ), , ; , ; , , , ,CAM send recv
t t u u c c c u u u c cq q q q u T u T t T= " Î " Î " Îa r k r p .
Modelling Conflict Areas in Visum 2.2
To reproduce conflict areas in TRE, they first have to be coded in a data structure. In Visum
this is ensured by creating five user-defined attributes for lane turns:
· CONFLICTAREA. Each conflict area is denoted with a string (in the examples we used
capital letters: A, B…). A conflict area is composed of exclusively two manoeuvres.
Flows of lane turns intersecting in a conflict area are both tagged with that string. In
case a lane turn flow crosses several conflict areas, they are reported in order of
crossing and are comma separated (i.e. A, B).
· PRIORITY. The non-negative priority factor is a parameter of proportionality,
together with turn capacities, to the time share of a conflict area that is reserved to
each conflicting flow.
· REDUCTIONFACTOR. Capacity reduction factor due to prudential approach to the
junction. It acts as a multiplier of the remaining time share of conflict area. It takes
values in the range of [0, 1], meaning that 1 represents no reduction in the remaining
time share, and 0 means that there is no time available.
· CONFLICTAREAREDUCTION. The general loss of efficiency in the usage of the
junction due to the presence of the conflict area.
· DRIVERBEHAVIOUR. Represents the human factor that affects the efficiency of a
junction in case when the sending flow of a turn is constrained by its forward star,
which cause disturbances and can affect the conflicting flow. This is the parameter of a
conflict area, not the turn itself. Therefore, every turn of a conflict area should have
the same value of the parameter. It takes values in the range of [0, 1], where 0
represents “polite” behaviour (no effect of the constrained flow on its conflicting flow)
and 1 is used for “impolite” behaviour (conflicting flow is influenced by minimum
capacity ratio).
Conflict Areas for Macroscopic Models in Dynamic Traffic Assignment
497
Once lane turns are created, they have to be filled in with values for all conflict areas. It is
done in Junction editor/Geometry/Lane turns. If no value is entered in some of the fields, it is
assumed to be 1. If turn belongs to several conflict areas and only one value is entered in the
field, it is assumed value for all the conflict areas. Different values for different conflict areas
are comma separated.
3 Model Analysis
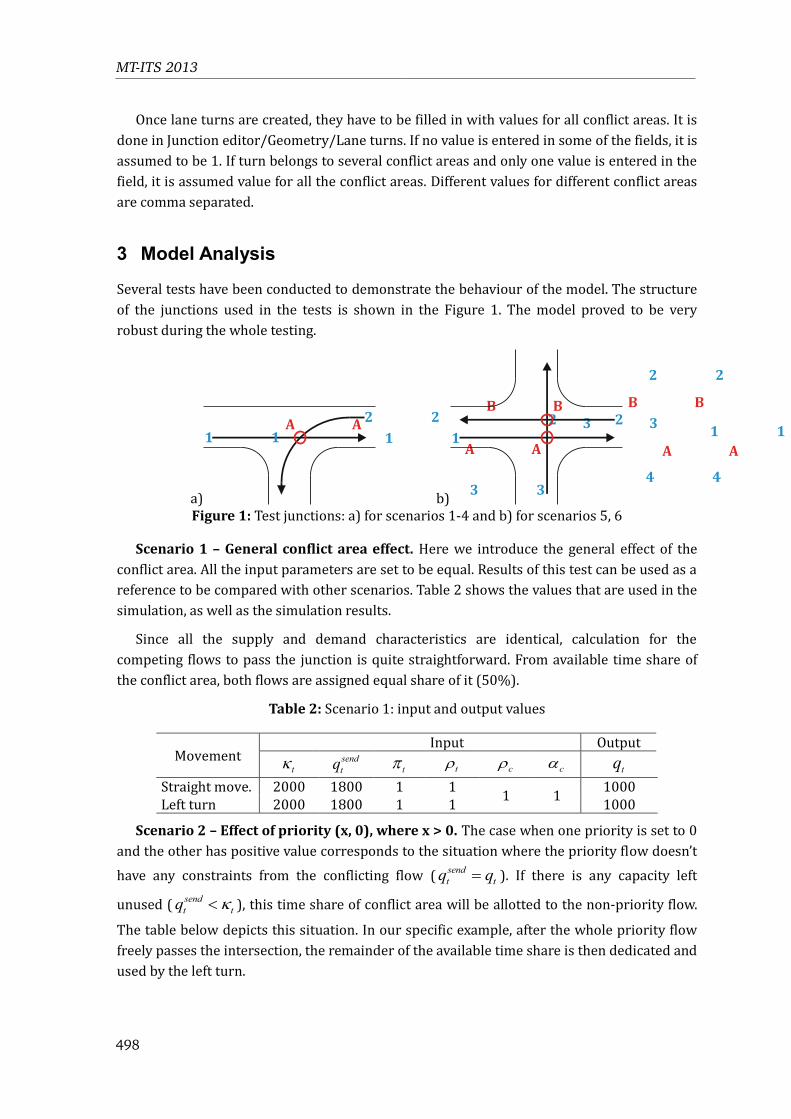
Several tests have been conducted to demonstrate the behaviour of the model. The structure
of the junctions used in the tests is shown in the Figure 1. The model proved to be very
robust during the whole testing.
a) b)
Figure 1: Test junctions: a) for scenarios 1-4 and b) for scenarios 5, 6
Scenario 1 – General conflict area effect. Here we introduce the general effect of the
conflict area. All the input parameters are set to be equal. Results of this test can be used as a
reference to be compared with other scenarios. Table 2 shows the values that are used in the
simulation, as well as the simulation results.
Since all the supply and demand characteristics are identical, calculation for the
competing flows to pass the junction is quite straightforward. From available time share of
the conflict area, both flows are assigned equal share of it (50%).
Table 2: Scenario 1: input and output values
Movement Input Output
tk send
tq tp tr cr ca
tq
Straight move. 2000 1800 1 1 1 1
1000
Left turn 2000 1800 1 1 1000
Scenario 2 – Effect of priority (x, 0), where x > 0. The case when one priority is set to 0
and the other has positive value corresponds to the situation where the priority flow doesn’t
have any constraints from the conflicting flow (send
t tq q= ). If there is any capacity left
unused (send
t tq k< ), this time share of conflict area will be allotted to the non-priority flow.
The table below depicts this situation. In our specific example, after the whole priority flow
freely passes the intersection, the remainder of the available time share is then dedicated and
used by the left turn.
A
B
1
2
3
A1
2
A
13
B
2
4
A
B
1
2
3
A1
2
A
13
B
2
4
MT-ITS 2013
498
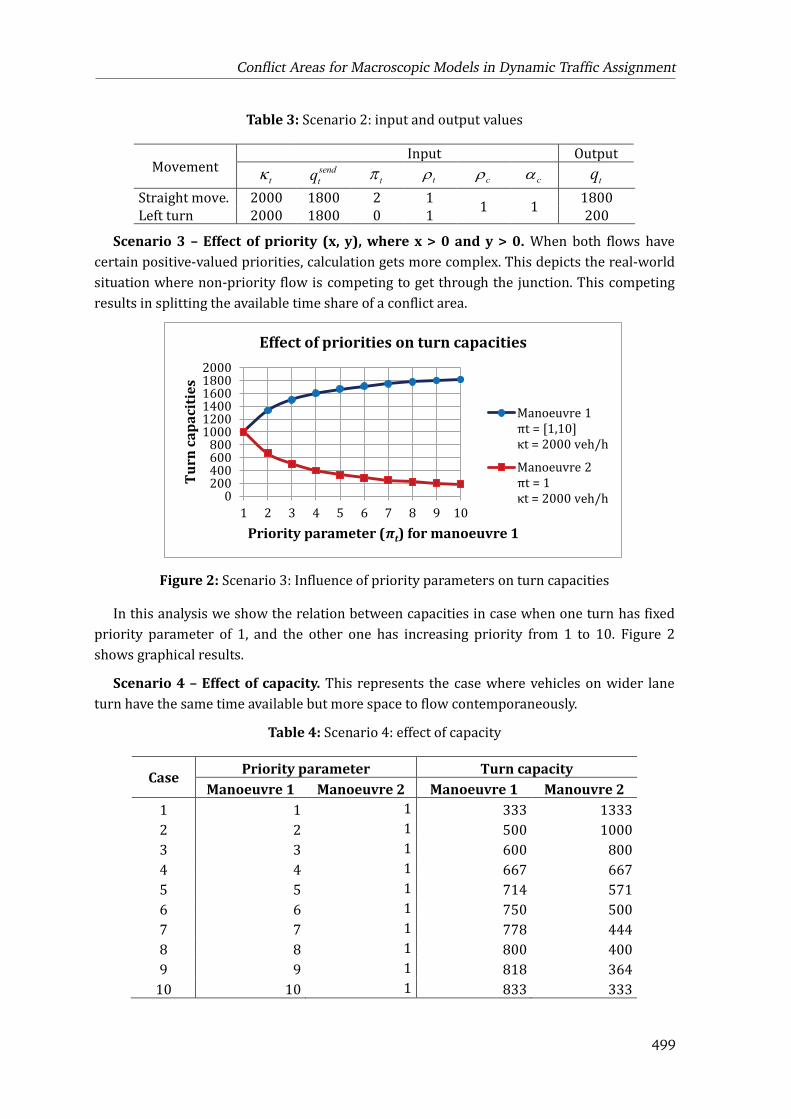
Table 3: Scenario 2: input and output values
Movement Input Output
tk send
tq tp tr cr ca
tq
Straight move. 2000 1800 2 1 1 1
1800
Left turn 2000 1800 0 1 200
Scenario 3 – Effect of priority (x, y), where x > 0 and y > 0. When both flows have
certain positive-valued priorities, calculation gets more complex. This depicts the real-world
situation where non-priority flow is competing to get through the junction. This competing
results in splitting the available time share of a conflict area.
Figure 2: Scenario 3: Influence of priority parameters on turn capacities
In this analysis we show the relation between capacities in case when one turn has fixed
priority parameter of 1, and the other one has increasing priority from 1 to 10. Figure 2
shows graphical results.
Scenario 4 – Effect of capacity. This represents the case where vehicles on wider lane
turn have the same time available but more space to flow contemporaneously.
Table 4: Scenario 4: effect of capacity
Case Priority parameter Turn capacity
Manoeuvre 1 Manoeuvre 2 Manoeuvre 1 Manouvre 2
1 1 1 333 1333
2 2 1 500 1000
3 3 1 600 800
4 4 1 667 667
5 5 1 714 571
6 6 1 750 500
7 7 1 778 444
8 8 1 800 400
9 9 1 818 364
10 10 1 833 333
0200400600800
100012001400160018002000
1 2 3 4 5 6 7 8 9 10
Tu
rn c
ap
ac
itie
s
Priority parameter (πt) for manoeuvre 1
Effect of priorities on turn capacities
Manoeuvre 1
πt = [1,10]
κt = 2000 veh/h
Manoeuvre 2
πt = 1
κt = 2000 veh/h
Conflict Areas for Macroscopic Models in Dynamic Traffic Assignment
499
Here the turn with higher capacity (2000 veh/h) has constant priority parameter of 1. The
conflicting turn has capacity of 1000 veh/h, and raise priority (Table 5).
Scenario 5 – Two conflict areas on one lane turn – the first one constraining. In this
case we test the junction with two conflict areas on one lane turn. The first one is more
constraining than the second one, in order to show how the non-used time share from one
turn is used by the other one.
Conflict area A consists of straight turns 1 and 3, while conflict area B consists of straight
turns 2 and 3 (Figure 1b). Straight turn 3 has lower priority factor in both conflict areas. For
conflict area A, straight movements 1 and 3 get 1333 veh/h and 667 veh/h respectively. In
this case, straight turn 2 gets 900 veh/h, while straight turn 3 gets 800 veh/h. After
calculating the share of unused time (133/2000), this result is multiplied with capacity of the
straight movement 2 and added to the initially calculated capacity, which ultimately gives the
value of 1000 veh/h.
Table 5: Scenario 5: input and output values
Movement Input Output
tk send
tq tp tr cr ca
tq
Straight m. 1 2000 1800 1 1
1 1
1333
Straight m. 2 1500 1800 1 1 1000
Straight m. 3 2000 1800 0.5 1 667
Scenario 6 – Two conflict areas on one lane turn – the second one constraining. In
this case, in contrast to the previous scenario, we put that the second conflict area is the
constraining one, to show the spillback from one conflict area to another. Geometry and
notation are the same as in the previous scenario.
Table 6: Scenario 6: input and output values
Movement Input Output
tk send
tq tp tr cr ca
tq
Straight m. 1 1500 1800 1 1
1 1
750
Straight m. 2 2000 1800 1 1 1333
Straight m. 3 2000 1800 0.5 1 667
Straight movement 3 has lower priority in both conflict areas. Under these circumstances,
conflict area B reduces the capacity of straight movement 3, calculated for conflict area A.
Going back to conflict area A, due to the minimum ratio (because of aggressive driving
behaviour defined by ca ), capacity of straight movement A is reduced accordingly.
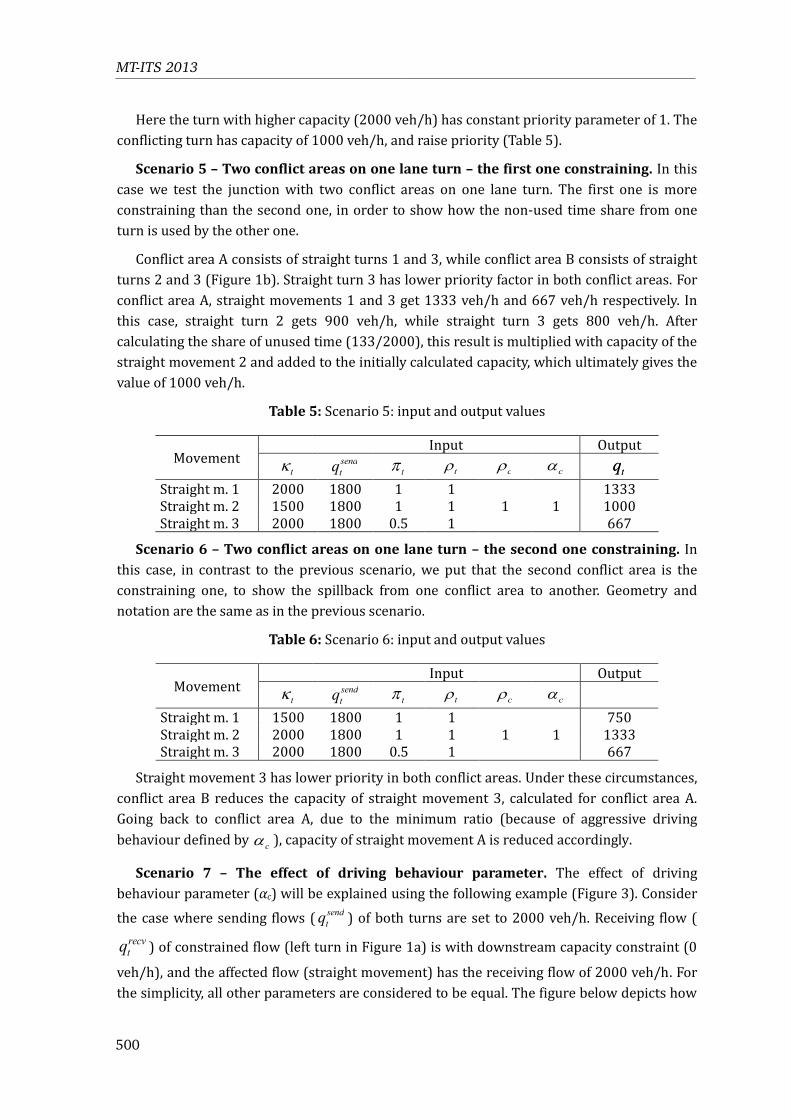
Scenario 7 – The effect of driving behaviour parameter. The effect of driving
behaviour parameter (αc) will be explained using the following example (Figure 3). Consider
the case where sending flows (send
tq ) of both turns are set to 2000 veh/h. Receiving flow (
recvtq ) of constrained flow (left turn in Figure 1a) is with downstream capacity constraint (0
veh/h), and the affected flow (straight movement) has the receiving flow of 2000 veh/h. For
the simplicity, all other parameters are considered to be equal. The figure below depicts how
MT-ITS 2013
500

the flow values, initial remaining flowsremtq and actual turn flows tq , change for different
values of αc. The red line shows that the value of affected flow changes in the non-linear
fashion. Further development of the model should go in the direction of ensuring linear
dependence between driver behaviour parameter and actual flow of the affected turn (black
line).
Figure 3: The effect of driving behaviour parameter (αc)
4 Conclusion
We presented the new Conflict Area Model for modelling and simulation of conflict areas at
junctions. Detailed mathematical model is shown. We introduced several factors that affect
the performance of the junctions and turns. They are capacity reduction factor, due to the
prudential approach to the junction; reduction factor for conflict area due to the general loss
of effectiveness; priority factor, to address the precedence at the junction; and driving
behaviour characteristic, which represents the “politeness” of drivers with respect to
blocking the conflicting flow. Various scenarios are tested and numerical results confirmed
the model to be very robust. Further developments should include corrected effect of the
driving behaviour parameter.
References
[Cor12] R. CORTHOUT: “Intersection modelling and marginal simulation in macroscopic
dynamic network loading”. PhD thesis. Leuven, Belgium: University of Leuven,
2012.
[Gen08] G. GENTILE: “The General Link Transmission Model for dynamic network loading
and a comparison with the DUE algorithm”. In: 2nd International Symposium on
Dynamic Traffic Assignment – DTA 2008. Leuven, Belgium, 2008.
[Gen11] G. GENTILE and L. MESCHINI: “Using dynamic assignment models for real-time traffic
forecast on large urban”. In: 2nd International Conference on Models and Technolo-
0
200
400
600
800
1000
1200
1400
1600
1800
2000
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Flo
w
Driving behaviour parameter (αc)
The effect of driving behaviour parameter (αc)
qtrem for constrained flow
qt for constrained flow
qtrem for affected flow
qt for affected flow
qt desired for affected flow
Conflict Areas for Macroscopic Models in Dynamic Traffic Assignment
501
gies for Intelligent Transportation Systems. Leuven, Belgium, Jun. 22–24, 2011.
[PTV10] PTV AG: VISSIM 5.30 User Manual. Karlsruhe, Germany: PTV AG, 2010.
[PTV12] PTV AG: VISUM 12.5 User Manual. Karlsruhe, Germany: PTV AG, 2012.
[Tid12] D. TIDDI: “Models for dynamic network loading and algorithms for traffic signal
synchronization in congested networks”. PhD thesis. Rome, Italy: Sapienza
University of Rome, 2012.
Corresponding author: Bojan Kostic, Sapienza University of Rome, Department of Civil,
Constructional and Environmental Engineering (DICEA), Via Eudossiana 18, 00184 Rome, Italy,
phone: +39 06 445 85737, e-mail: [email protected]
MT-ITS 2013
502
Related Documents











