CHAPTER 6 SYNCHRONOUS MOTOR

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
CHAPTER 6SYNCHRONOUS MOTOR
SUMMARY OF CHAPTER 6
6.1 Understand the construction and principle operation of a synchronous motor. 6.1.1 Explain the construction of a synchronous motor. 6.1.2 Explain the operation of a synchronous motor without load and with full load. 6.1.3 Determine the power factor using data in 6.1.2. 6.1.4 State methods of starting a synchronous motor.

6.1.5 Elaborate the characteristics of a synchronous motor for three types of excitation. a. Low excitation b. Normal excitation c. Excessive excitation 6.1.6 Show the calculations and phase diagrams of synchronous motors in correcting power factor. 6.1.7 Compare the particular of speed, power factor and excitation between synchronous and induction motors. 6.1.8 State the applications of synchronous motor.
What is Synchronous motor?

• Synchronous motors are synchronous machines used to convert electric power to mechanical power.
• Synchronous motors can be contrasted with induction motors, which must slip in order to produce torque.
• The speed of the synchronous motor is determined by the number of magnetic poles and the line frequency.
• As the name implies, synchronous motors run in synchronism with revolving field.
• The speed of rotation is therefore tied to the frequency of the source.
• Because the frequency is fixed, the motor speed stays constant, irrespective of the load or voltage of the three-phase line.

Construction of Synchronous motor?
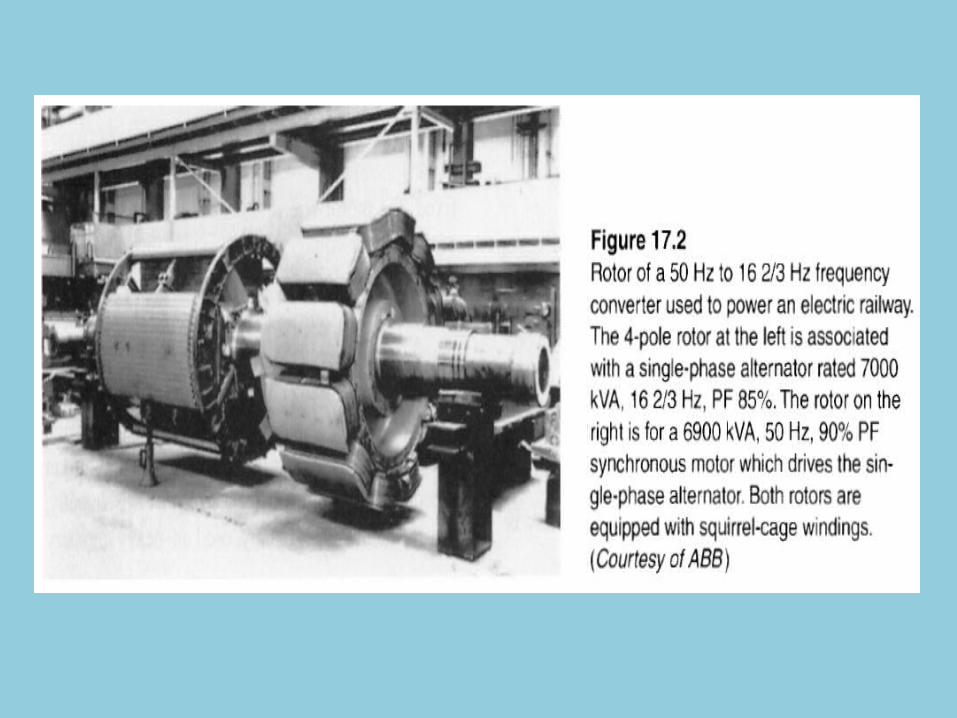
• The construction of the synchronous motors is essentially the same as the construction of the salient- pole alternator.
• In fact, such an alternator may be run as an ac motor. It is similar to the drawing in figure below.
• Synchronous motors have the characteristic of constant speed between no load and full load.


• They are capable of correcting the low power factor of an inductive load when they are operated under certain conditions.
• They are often used to drive dc generators. Synchronous motors are designed in sizes up to thousands of horsepower.
• They may be designed as either single-phase or multiphase machines. The discussion that follows is based on a three-phase design.

How does the Synchronous motor works?

• To understand the basic concept of synchronous motor, Figure below which shows a two-pole synchronous motor.

• The field current IF of the motor produces a steady-state magnetic field BR.
• A three-phase set of voltages is applied to the stator of the machine, which produces a three-phase current flow in the windings.
• A three-phase set of currents in an armature winding produces a uniform rotating magnetic field BS.
• Therefore, there are two magnetic fields present in the machine, and the rotor field will tend to line up with the stator field, just as two bar magnets will tend to line up if placed near to each other.
• Since the stator magnetic field is rotating the rotor magnetic field (and the rotor itself) will constantly try to catch up.

• The larger the angle between the two magnetic fields (up to a certain maximum) the greater the torque on the rotor of the machine.
• The basic principle of synchronous motor operation is that the rotor “chases” the rotating stator magnetic field around in a circle never quite catching up with it.
• The larger the angle between the two magnetic fields (up to a certain maximum) the greater the torque on the rotor of the machine.

• The disadvantages of a synchronous motor is that it cannot be started from a standstill by applying three-phase ac power to the stator.
• A synchronous motor in its purest form has no starting torque. It has torque only when it is running at synchronous speed
How to start the Synchronous motor?

• Since the synchronous motor cannot start by itself, therefore the rotor is usually equipped with a squirrel-cage winding so that it can start up as an induction motor.
• To understand the nature of the starting problem, we will see the Table below.
• This figure shows a 60 Hz synchronous motor at the moment power is applied to its stator windings.
• The rotor of the motor is stationary and therefore the magnetic field BR is stationary.
• The stator magnetic field BS is starting to sweep around the motor at synchronous speed.




What are the approach to start the Synchronous motor?

a) Reduce the speed of the stator magnetic field.
b) Use an external prime mover.
c) Use damper windings or amortisseur windings.
Reduce the speed of the stator magnetic field
• This is to a low enough value that the rotor can accelerate and lock in with it during one half-cycle of the magnetic field’s rotation.
• This can be done by reducing the frequency of the applied electric power.

Use an external prime mover
• This is to accelerate the synchronous motor up to synchronous speed, go through the paralleling procedure, and bring the machine on the line as a generator.
• Then turning off or disconnecting the prime mover will make the synchronous machine a motor.

Use damper windings or amortisseur windings
• Amortisseur windings are special bars laid into notches carved in the face of a synchronous motor’s rotor and then shortened out on each end by a large shorting ring.

How does the characteristics of a synchronous motor under different type of excitation?

Synchronous Motor Exciting types
a) Normal excitation [ Emf = V ]b) Under-excited [ Emf < V ]c) Over-excited [ Emf > V ]

It has a leading power factoru
Application of Synchronous Motor
1) It is used in power houses and sub-stations in parallel to the bus bars to improve power factor. For this purpose it is run without mechanical load on it and over excited.
2) In factories having large number of induction motors or transformers operating at lagging power factor, it is used for improving power factor.

3) It is used to generate electric power at power station, one of the most important application of synchronous machines.
4) it is used to control the voltage at the end of transmission line by varying its excitation.
5) It is also used in rubber mills, textile mills, cement factories, air compressors, centrifugal pumps which requiring constant speed.
6) It is used in motor generator sets requiring constant speed.

Comparison between Synchronous and Induction Motor

Synchronous Motor
Related Documents











