1 CENTRO PAULA SOUZA FACULDADE DE TECNOLOGIA FATEC SANTO ANDRÉ Tecnologia em Eletrônica Automotiva ALÁDIO VANDERLEI DE LIMA JUNIOR CARLOS DA SILVA ROBSON DIAS ROCHA SISTEMA DE CONTROLE AUTÔNOMO PARA ESPELHOS RETROVISORES ELÉTRICOS Santo André – São Paulo 2015

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
CENTRO PAULA SOUZA
FACULDADE DE TECNOLOGIA
FATEC SANTO ANDRÉ Tecnologia em Eletrônica Automotiva
ALÁDIO VANDERLEI DE LIMA JUNIOR
CARLOS DA SILVA
ROBSON DIAS ROCHA
SISTEMA DE CONTROLE AUTÔNOMO PARA ESPELHOS RETROVISORES ELÉTRICOS
Santo André – São Paulo 2015

2
CENTRO PAULA SOUZA
FACULDADE DE TECNOLOGIA
FATEC SANTO ANDRÉ Tecnologia em Eletrônica Automotiva
ALÁDIO VANDERLEI DE LIMA JUNIOR
CARLOS DA SILVA
ROBSON DIAS ROCHA
SISTEMA DE CONTROLE AUTÔNOMO PARA ESPELHOS RETROVISORES ELÉTRICOS
Monografia apresentada ao Curso de Tecnologia em Eletrônica Automotiva da FATEC Santo André, como requisito parcial para conclusão do curso em Tecnologia em Eletrônica Automotiva.
Orientador: Prof. MSc. Murilo Zanini de Carvalho Coorientadora: Prof. MSc. Suely Midori Aoki
Santo André – São Paulo 2015

3

4
Dedicamos este trabalho aos nossos familiares,
amigos, docentes e a toda equipe de funcionários
da FATEC Santo André pelo espaço e
oportunidade oferecida durante o
desenvolvimento e conclusão do projeto.

5

6
AGRADECIMENTOS Agradecemos primeiramente a Deus por concretizar nossos objetivos, ao nosso
orientador Prof. MSc. Murilo Zanini de Carvalho e a coorientadora Prof. MSc. Suely Midori
Aoki, pela dedicação e esclarecimento de dúvidas durante a realização desse trabalho, aos
nossos colegas de sala que mantiveram estímulos nos momentos mais árduos desta jornada e
aos professores, colaboradores e funcionários da Fatec Santo André que sempre estiveram
prontos a nos ajudar.
Agradecemos aos nossos familiares pelo apoio e incentivo para que déssemos
continuidade aos estudos, e a todos aqueles que direta e indiretamente contribuíram para a
realização deste trabalho.

7
"Seja você quem for, seja qual for a posição
social que você tenha na vida, a mais alta ou a
mais baixa, tenha sempre como meta muita
força, muita determinação e sempre faça tudo
com muito amor e com muita fé em Deus, que
um dia você chega lá. De alguma maneira você
chega lá.”
Ayrton Senna

8
RESUMO
O objetivo do trabalho é construir um sistema de controle autônomo para espelhos
retrovisores elétricos automotivos, onde utilizaremos um microprocessador baseado em
arquitetura ARM chamado Raspberry Pi 2, que possui periféricos integrados à placa e são
controlados pelo microprocessador residente. Utilizamos uma webcam para realizar a captura
de imagens do interior do veículo, mais precisamente a região do banco do motorista, essa
imagem será através de um software de processamento de imagem (SimpleCV) analizada e
identificada pela implementação de um algoritmo de programação em Python v2.7, as suas
características e possibilitando a geração um sinal de comando através das saídas GPIO
disponíveis do Raspberry Pi 2 para a atuação dos motores elétricos (DC) dos espelhos
retrovisores através de um circuito de ponte H dupla implementado pelo grupo.
Palavras chaves: eletrônica, automóveis, retrovisores, arquitetura ARM, espelhos,
microprocessador.

9
ABSTRACT
The objective of this work is to build a standalone control system for automotive
electric mirrors, where we will use a microprocessor based on ARM architecture called
Raspberry Pi 2, which features integrated Board peripherals and are controlled by the
microprocessor. Use a webcam to perform the capture of images from inside the vehicle, the
driver's seat, that image will be through an image processing software (SimpleCV) analyzed
and identified by implementing a scheduling algorithm in Python v. 2.7, their characteristics
and enabling the generation a command signal through GPIO outputs available from
Raspberry Pi 2 for performance of electric motors (DC) of rearview mirrors through a
circuit H double bridge implemented by the group.
Keywords: electronics, automobiles, mirrors, ARM architecture, mirrors, microprocessor.

10
LISTA DE ILUSTRAÇÕES
Figura 01 Retrovisor 1906 19
Figura 02 Ray Harroun 20
Figura 03 Vehicle Marmon Wasp #32 20
Figura 04 Localização do Retrovisor no Carro de Harroun 21
Figura 05 Retrovisor Kombi 1973 22
Figura 06 Retrovisor Fusca 1980 22
Figura 07 Retrovisor Elétrico Monza 1985 23
Figura 08 Visão proporcionada pelo espelho retrovisor interno 25
Figura 09 Visão proporcionada pelo espelho retrovisor externo 26
Figura 10 Ajuste do Incorreto do Espelho 27
Figura 11 Ajuste do Correto do Espelho 28
Figura 12 Ponto Cego 28
Figura 13 Imagem do Raspberry Pi 2 30
Figura 14 Dimensões do hardware Raspberry Pi 2 31
Figura 15 Guido van Rossum 32
Figura 16 Pinagem do Raspberry Pi 2 33
Figura 17 Pinagem do Hardware Raspberry Pi 2 33
Figura 18 Configuração para Piscar um LED 33
Figura 19 Espelho retrovisor Fox 2009 usado no projeto 36
Figura 20 Analize do Projeto como um Sistema de Malha Aberta 37
Figura 21 Configuração do Posicionamento da câmera vista do condutor 38
Figura 22 Configuração do Posicionamento da câmera vista da lateral 38
Figura 23 Simulação da imagem capturada, antes do processamento 39
Figura 24 Simulação Resultado da imagem capturada, após o processamento 40
Figura 25 Esquema Elétrico Ponte H 41
Figura 26 Esquema Elétrico Ponte H em Funcionamento 42
Figura 27 TIP122 Circuito Interno 43
Figura 28 Fotoacoplador PC 815 Sharp, Imagem com alterações 43
Figura 29 Diagrama Elétrico do Espelho Retrovisor do Veículo Golf 47
Figura 30 Imagem ilustrativa das posições do espelho 48
Figura 31 Ligação para Atuação do Espelho Retrovisor 49
Figura 32 Diagrama Elétrico da Ponte Dupla Implementada Conectada ao Espelho Retrovisor Elétrico 50
Figura 33 Circuito Ponte H Dupla 51
Figura 34 Valores de Consumo de Corrente Transistor TIP122 52
Figura 35 Consumo de Corrente Acionando Motor Elétrico para Direita 52
Figura 36 Consumo de Corrente Acionando Motor Elétrico para Esquerda 53

11
Figura 37 Consumo de Corrente Acionando Motor Elétrico para Baixo 53
Figura 38 Consumo de Corrente Acionando Motor Elétrico para Cima 54

12
LISTA DE TABELAS
Tabela 01 Teste de Polaridade do Circuito do Espelho Retrovisor Esquerdo 48
Tabela 02 Medição de Consumo de Corrente dos Motores Elétricos DC 54

13
LISTA DE ABREVIAÇÕES
ARM (Advanced RISC Machine)
BIOS Sistema Básico de Entrada e Saída (Basic Input / Output System)
DC Corrente Contínua (Direct Current)
GND Filtro Graduado de Densidade Neutra (Graduated Neutral Density Filter)
GPIO Entrada/Saída de Propósito General (General Purpose Input Output)
HDMI Interface Multimídia de Alta Definição (High Definition Multimedia Interface)
EEPROM Memória Programável Apagável Somente de Leitura (ElectricallyErasable
Programmable ReadOnlyMemory)
I/O Entrada/Saída (Input/Outpu)
LED Diodo Emissor de Luz (Light Emitting Diode)
OS Sistema Operacional (Operating System)
PWM Modulador de Largura de Pulso (Pulse Width Module)
USB Porta Universal (Universal Serial Bus)
14
SUMÁRIO
1. INTRODUÇÃO 15 1.1 Objetivos e Motivação 16 1.2 Contribuições 16 1.3 Conteúdo 17 2. FUNDAMENTAÇÃO TEÓRICA 18 2.1 Evolução do Retrovisor 18 2.2 Tecnologias Utilizadas nos Retrovisores 21 2.3 Tipos de Retrovisores 24 2.4 Ponto cego 26 2.5 Raspberry Pi 2 29 2.6 Introdução a Linguagem Python 31 2.7 Hardware GPIO 32 2.8 Visão Computacional 34 3. DESENVOLVIMENTO DO PROJETO 35 3.1 Materiais 36 3.2 Metodologia 37 3.3 Criação do Algoritmo 39 3.4 Sistema de Atuação Ponte H 41 3.5 Sistema de Atuação Tipp 122 42 3.6 Sistema de Atuação Fotoacoplador PC 815 Sharp 43 3.7 Configuração do Raspberry Pi 2 44 3.8 Desenvolvimento do Hardware 46 3.9 Resultados Obtidos 54 3.10 Dificuldades no Desenvolvimento do Projeto 55 4. CONSIDERAÇÕES FINAIS 57 4.1 Propostas Futuras 58 REFERÊNCIAS 59

15
1 INTRODUÇÃO
No ano de 1906, o francês Alfred Faucher, evitou um acidente de trânsito ao
perceber que um veículo faria um trajeto ao mesmo tempo em que ele, isso foi possível
através de um reflexo, após a ocorrência desse evento ele teve a idéia de desenvolver um
objeto que o auxiliaria na visualização da parte traseira do veículo. Esse item se popularizou
e se tornou conhecido como espelho retrovisor. Anos mais tarde, na primeira Indy 500 de
1911, o piloto Ray Harroun, decidiu cortar o peso de seu veículo com a substituição de seu
mecânico por um espelho na lataria. O mecânico tinha como função realizar as manutenções
no veículo, visualizar os demais competidores durante a prova e informar a situação ao piloto.
Com isso, o Ray Harroun se tornou o vencedor da competição, confessando mais tarde que
havia visto uma charrete com espelhos instalados e de lá que tirou a idéia de adaptar o
retrovisor em veículos movidos à gasolina.
Com o aumento global do uso de automóveis a utilização dos espelhos retrovisores
se tornou obrigatória na década de 20, pois os espaços das vias se tornaram cada vez mais
concorridos, isso devido à grande frota de veículos em circulação. Essas condições forçaram o
condutor a estar sempre atento aos eventos decorrentes no ambiente externo.
Com o passar do tempo e o aprimoramento das leis, a implementação deste
equipamento se tornou obrigatória visto que este é um item de segurança. Porém, mesmo com
a obrigatoriedade da implementação dos espelhos retrovisores restam muitos problemas
referentes à falta de visualização do condutor. Um dos principais fatos é o posicionamento
incorreto dos espelhos por parte dos motoristas, diminuindo ainda mais o campo de visão e
aumentando riscos de acidentes.
Nosso projeto tem como finalidade a construção de um sistema para controle
autônomo dos espelhos retrovisores. Utilizando uma webcam para captura de imagens,
softwares de processamento de imagem (SimpleCV), linguagem de programação em Python,
Raspberry Pi 2 que é um microprocessador baseado na arquitetura ARM responsável pelo
processamento e geração de sinal de controle do nosso sistema, hardware Ponte H

16
implementado pelo grupo atendendo as características de construção do espelho retrovisor
elétrico automotivo do veículo Fox 2009.
1.1 Objetivos e motivação
Sabendo que a grande parte dos acidentes de transito se dá por falta de visibilidade
por parte do condutor, o objetivo deste projeto é fazer o uso de ferramentas de programação
disponíveis atualmente, bem como recursos de hardware, de forma a promover a integração
de um sistema automatizado para regulagem dos espelhos retrovisores automotivos e, assim
aprimorar a segurança dos passageiros do veículo, melhorando as condições de visibilidade
do condutor. Em outras palavras, nosso projeto visa a construção de um sistema de controle
autônomo para os espelhos retrovisores elétricos, afim de movimentálos quando constatada a
presença de um condutor dentro do veículo
A principal motivação é aplicarmos os conhecimentos técnicos adquiridos durante o
curso de Tecnologia em Eletrônica Automotiva em benefício da sociedade, visando minimizar
os acidentes de trânsito gerados por uma regulagem incorreta dos espelhos retrovisores, e
posteriormente gerar um conforto ao usuário.
1.2 Contribuições
Aproximadamente 90% das informações necessárias para uma condução segura estão
relacionadas à visão, e que os espelhos retrovisores são equipamentos fundamentais para a
obtenção dessas informações, o controle por ajuste autônomo visa influenciar de maneira
positiva no modo de direção do usuário, proporcionando uma melhor experiência entre o
condutor e o veículo de forma a minimizar os acidentes relacionados a sua falta de
visibilidade, seja a outros veículos ou a pedestres.

17
1.3 Conteúdo
Este trabalho estará assim dividido; o capítulo 2 discorrerá sobre uma revisão
bibliográfica abordando a história e evolução dos espelhos retrovisores ; no capítulo 3
abordaremos as atividades desenvolvidas com o Raspberry Pi 2, softwares, hardware,
implementações realizadas no hardware, quais os resultados obtidos durante os ensaios
realizados e dificuldades enfrentadas durante o desenvolvimento do projeto. Finalmente, no
capítulo 4 discorremos sobre as conclusões obtidas dos resultados e propostas futuras para o
projeto.

18
2 FUNDAMENTAÇÃO TEÓRICA
Ao longo deste capítulo, são abordados as principais referencias relativas ao tema
retrovisores automotivos e tecnologias aplicadas, onde os mais renomados pesquisadores da
área foram consultados e o estado da arte é apresentado após uma breve revisão bibliográfica.
2.1 EVOLUÇÃO DO RETROVISOR
A visibilidade da faixa de trânsito e dos elementos de sinalização que o compõem é de
extrema importância para o condutor e pedestres, pois são itens de segurança que visam evitar
acidentes de trânsito.
Os espelhos retrovisores automotivos permitem uma regulagem manual ou através de
controle eletrônico, o ajuste desse item de maneira correta possibilita uma melhoria na
visibilidade do condutor, porém não elimina os pontos cegos do veiculo. As características
originais do veículo não devem ser alteradas para preservar a segurança dos condutores e
pedestres.
As limitações de visibilidade podem ser geradas por outros fatores além de uma
regulagem incorreta dos espelhos retrovisores como: uma iluminação inadequada das vias,
sistema de iluminação do veiculo com mau funcionamento, condições climáticas e
fisiológicas do condutor.
De acordo com o arquivo municipal da cidade de GifsurYvette na França em 13
Abril de 1972, o francês Alfred Faucher (1888 1974) apresentou a cidade um estranho
objeto cônico de metal pintado em azul com um circulo vermelho. Este é o primeiro "espelho
de atenção automotivo". Faucher, inventor do espelho, é da mesma época onde se iniciou a
história do automóvel e em 1906, aos 18 anos durante uma viagem a Melun localizado na
França, percebeu o reflexo de um carro atrás do seu que se preparava para virar ao mesmo
tempo em que ele. Ao evitar assim o acidente, teve a idéia do “espelho alarme”.
Ele registrou uma patente em 27 de Agosto de 1906, que foi emitida em 05 de
Novembro sob o número 369252. Em seguida, investiu sua invenção em lojas de

19
departamento como Printemps, Galeries Lafayette, e em caminhões militares e carros da
equipe durante a Segunda Guerra Mundial. A (fig. 01) mostra esse retrovisor.
Figura 01 Retrovisor 1906. (http://fr.topictopos.com/retroviseurgifsuryvette)
Já em 1911, na primeira edição da prova de 500 milhas em Indianápolis, o piloto
Ray Harroun (fig. 02), entrou para a história como o vencedor da primeira edição da Indy
500, ele acreditava que seu carro não quebraria durante a prova, e com isso tomou a decisão
de cortar peso de seu veículo competindo sem o mecânico. Naquela época as corridas
comportavam duas pessoas no carro, o piloto e um mecânico. O mecânico além de fazer
reparos no carro durante as provas, tinha a função de olheiro para o piloto, avisando o
condutor dos carros ao redor e dos perigos pelo caminho.
20
Figura 02 - Ray Harroun 12/01/1879 - 19/01/1968. (http://en.wikipedia.org/wiki/Ray_Harroun)
A falta do mecânicoolheiro poderia comprometer a segurança dos participantes no
evento, mas Harroun, no entanto adaptou um espelho no carro #32 (fig. 03) e ganhou a
corrida, admitiu mais tarde que o espelho tremia tanto que ele não podia ver coisa alguma e
que a idéia de adaptar o retrovisor havia surgido após ter visto uma charrete com espelhos
instalados.
Figura 03 Vehicle Marmon Wasp #32. (http://cruisein.com/firstindianapolis500controversy/)

21
Figura 04 Localização do Retrovisor no Carro de Harroun. (http://rickdebruhl.com/?m=201205)
Mas Elmer Berger (1891 1952) foi o primeiro a incorporar o aparelho na lataria
de um carro para utilização em estrada, patenteou em 1921, ano em que o espelho retrovisor
passou a ser obrigatório em todos os carros. Berger acabou ficando com o título de inventor
do espelho retrovisor.
2.2 Tecnologias Utilizadas nos Retrovisores
Segundo (Silva, Marcio de Puccio, 2011) nos veículos produzidos no Brasil até
1980, a preocupação existente para desenvolvimento do espelho retrovisor era somente
atendimento a legislação. Naquela época, o corpo dos espelhos era produzido com material
metálico ou polimérico, que alojava diretamente uma lente de espelho plana e possuía uma
articulação simples, que permite a rotação em torno de um eixo ou uma articulação esférica,
para ser possível a regulagem diretamente utilizando o corpo.
22
Figura 05 Retrovisor Kombi 1973. (http://aircooledforever.blogspot.com.br/2014_11_30_archive.html)
Figura 06 Retrovisor Fusca 1980. (http://produto.mercadolivre.com.br/MLB702985122)
A partir de 1980, houve uma evolução para melhorar o conforto do motorista na
forma de regular o espelho. Para os modelos mais caros e luxuosos, os espelhos passaram a
ter um mecanismo que permite a regulagem da lente de maneira independente em relação ao
corpo do espelho, através de um manípulo que ficava na parte interna da porta. Para ser
possível essa forma de movimentação, foi necessário adicionar um suporte que de um lado
fixase rigidamente ao corpo e do outro permite que a lente se movimente através do
manípulo, que se conecta ao suporte da lente usando cabos. Nessa época, os polímeros
passaram a ser utilizados frequentemente, pois os espelhos tinham formas mais complexas, já

23
objetivando um melhor desempenho aerodinâmico. Também começaram a surgir os primeiros
modelos com retrovisores externos do lado direito.
Figura 07 Retrovisor Elétrico Monza 1985. (http://produto.mercadolivre.com.br/MLB695255545)
A partir de 1985, outros recursos começaram a ser incluídos nos espelhos, como
acionamento elétrico e aquecimento da lente para evitar problemas de visualização. Com o
aumento da quantidade de componentes e funções do espelho retrovisor, foi necessário
estruturálo com uma parte interna metálica para garantir resistência e rigidez ao conjunto. O
lado negativo da inclusão do reforço metálico é o aumento de peso do conjunto espelho
retrovisor.
Entre 2000 e 2011 mais recursos foram incluídos:
tilt down: recurso que abaixa a lente do retrovisor do lado direito quando se engata a marcha
a ré, para facilitar a visualização inferior do lado direito do veículo.
recolhimento elétrico do espelho: este recurso permite o basculamento do corpo do
retrovisor na direção da porta quando se desliga o veículo, para evitar abalroamento em vias
estreitas nas quais o veículo é estacionado.
luzes de direção e iluminação do solo: em vários modelos foram incorporadas estas
funções por motivos funcionais e estéticos.
24
radar: alguns modelos importados já dispõem deste recurso que indica através de luzes se
existe outro veículo próximo, alertando assim que não se deve fazer a manobra de mudança
de faixa.
E maiores preocupações de desempenho também, tais como:
avaliação aeroacústica: simulações emsoftware específico apresentam de forma qualitativa
o desempenho acústico e aerodinâmico. A forma do corpo e base do retrovisor são
modificadas para obter resultados satisfatórios.
avaliação de dispersão de água: simulações em software avaliam o desempenho em chuva
evitando que as gotas de água se acumulem no vidro lateral dificultando a visualização do
motorista.
avaliação de vibração da lente: parâmetros rigorosos de aceitação de vibração para evitar
desconforto visual ao motorista.
2.3 Tipos de Retrovisores
É o responsável por refletir a imagem do vidro traseiro, e proporcionar ao motorista
uma visão traseira do veículo. Instalado no interior do compartimento dos passageiros em
alguns veículos esse espelho é preso ao parabrisa do veículo, em outros é fixado na parte
frontal do teto do veículo. Por ser de tamanho reduzido para também não prejudicar a
visibilidade frontal, há relatos internacionais que informam ocorrências de acidentes
envolvendo pedestres e veículos causados também pela pouca visibilidade proporcionada por
ele (Martins Pereira, Gabriel Espírito Santo, 2007).

25
Figura 08 Visão proporcionada pelo espelho retrovisor interno. (BOSCH, 2005).
A visibilidade traseira é compreendida com a visão que o condutor obtém com o
auxílio do espelho retrovisor interno, dos elementos situados externamente atrás do veículo.
Instalado sobre um elemento da superfície externa do veículo para proporcionar uma
visão lateral (Figura 09). Este componente ajuda o motorista na mudança de direção como,
por exemplo, em uma mudança de faixa ou mesmo em uma manobra.
Os espelhos retrovisores convexos, com curvatura externa ao plano do espelho, têm a
função de aumentar o campo visual do motorista, compensando a diminuição do campo de
visão provocada pela distância entre o retrovisor e os olhos do condutor. Segundo (Martins
Pereira, Gabriel Espírito Santo, 2007) é a forma encontrada pela indústria para não instalar
retrovisores muito grandes, que prejudicam o design e a estabilidade do veículo. Na maioria
dos veículos nacionais, há retrovisores planos do lado esquerdo e convexos do lado direito,
em função da distância maior que existe entre o motorista até o retrovisor e devido a
legislação americana que determina a proibição de diminuição da proporção da imagem do
lado esquerdo.
Além de todos os pontos já mencionados, podemos salientar ainda, que veículos
modernos de algumas montadoras nacionais, possuem regulagem elétrica dos retrovisores
externos e estão equipados com um dispositivo de auto rebatimento do espelho retrovisor
externo direito quando se engata a ré, isto é, num momento de manobra quando o usuário

26
engata no veículo à condição de marchar à ré, um módulo eletrônico recebe este sinal e
verifica a condição do interruptor seletor de regulagem do espelho, caso este esteja na
condição de regulagem do espelho externo direito, o modulo interpreta que o usuário deseja
ativar a função de auto rebatimento do espelho realizando a movimentação do espelho
externo, objetivando a melhor visibilidade da roda traseira do veículo. Nesta condição ainda
há a piora de visibilidade traseira do motorista, pois ele praticamente perde a visibilidade
direita do ambiente e passa a visualizar um detalhe do veículo, podendo não enxergar um
pedestre ou obstáculo um pouco mais recuado.
Figura 09 – Visão proporcionada pelo espelho retrovisor externo. (BOSCH, 2005).
2.4 Pontos Cegos
Na área automotiva, um ponto cego é uma área externa do veículo que o motorista é
incapaz de ver ao dirigir. Este ponto cego pode ser causado pelo próprio design do veículo
como colunas, encosto de cabeça, os próprios passageiros e outros objetos. Apesar de o ponto
cego ser relativamente pequeno perto do tamanho do carro, ele representa fisicamente uma
área de cobertura muito além do que se pode ver (RISOVAS, 2013).
Além das causas citadas por (RISOVAS, 2013) o que também contribui para um
aumento dessa área do ponto cego é um mal ajuste dos espelhos retrovisores ocasionado pelo
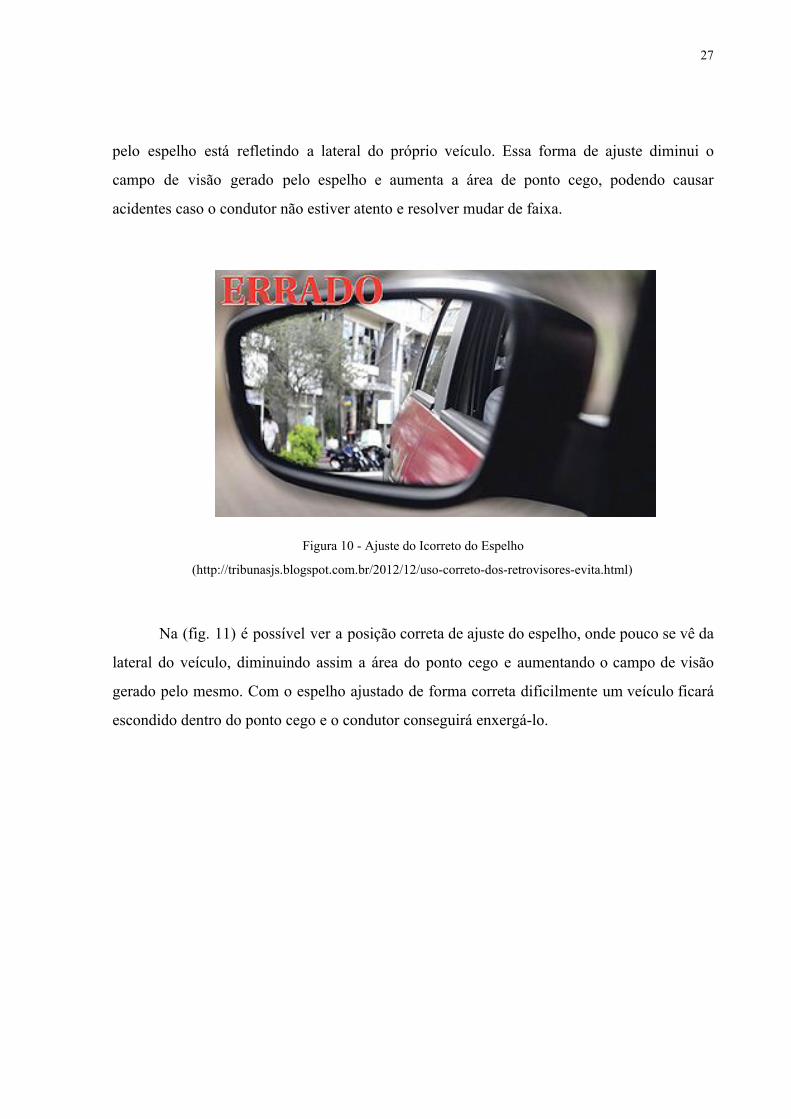
condutor. Na (fig. 10) vemos no canto direito que quase um terço do campo de visão gerado
27
pelo espelho está refletindo a lateral do próprio veículo. Essa forma de ajuste diminui o
campo de visão gerado pelo espelho e aumenta a área de ponto cego, podendo causar
acidentes caso o condutor não estiver atento e resolver mudar de faixa.
Figura 10 Ajuste do Icorreto do Espelho
(http://tribunasjs.blogspot.com.br/2012/12/usocorretodosretrovisoresevita.html)
Na (fig. 11) é possível ver a posição correta de ajuste do espelho, onde pouco se vê da
lateral do veículo, diminuindo assim a área do ponto cego e aumentando o campo de visão
gerado pelo mesmo. Com o espelho ajustado de forma correta dificilmente um veículo ficará
escondido dentro do ponto cego e o condutor conseguirá enxergálo.

28
Figura 11 Ajuste do Correto do Espelho
(http://tribunasjs.blogspot.com.br/2012/12/usocorretodosretrovisoresevita.html)
Outro conhecido ponto cego no veículo é o espaço entre a visão periférica do
motorista e a área refletida pelo espelho retrovisor interno. Este tipo de ponto cego pode
esconder um veículo inteiro, essa é uma boa razão para o motorista olhar atentamente aos
espelhos retrovisores, direito e esquerdo, antes de mudar de faixa (RISOVAS, 2013).
Figura 12 Ponto Cego (http://www.receitasmalucas.com.br/)
Os espelhos retrovisores podem eliminar pontos cegos atrás do veículo, mas também
deixam grandes áreas descobertas dos dois lados do mesmo. O uso de um espelho retrovisor

29
convexo para os pontos cegos pode permitir ao motorista que veja objetos que não seriam
normalmente vistos por um espelho normal, no entanto as imagens são distorcidas e podem
dificultar para o motorista julgar a distância deste objeto em relação ao veículo. Por esta razão
que em alguns países é ilegal o uso de espelho convexo (About.com Guide, 2012).
Um estudo de caso do posicionamento do retrovisor pesquisado no site via seguras da
associação brasileira de prevenção dos acidentes de trânsito indica aos motociclistas que para
fugirem do ponto cego é necessário buscar sempre ver o rosto do motorista refletido no
retrovisor, ou seja, se você o vê, ele o verá.
Portanto o piloto deve fazer de tudo para ser visto no trânsito, pois em muitos casos de
acidentes envolvendo motos as pessoas alegam não as terem visto. Ainda segundo estatistícas
do site cerca de 60 % dos acidentes envolvendo automóvel, o motorista alega não ter visto o
outro veículo.
2.5 Raspberry PI 2
É um microprocessador baseado na arquitetura ARM que pode ser conectado ao
monitor de um televisor com entrada HDMI ou de computador, esse dispositivo destinase a
incentivar crianças a aprender a programar e explorar a computação. O Raspberry Pi 2 não
possui BIOS ouSetup, todas as configurações que estão relacionadas ao processo deboot e ao
hardware são feitas em um arquivo de texto localizado no diretório raiz do cartão, o
"config.txt". Compatível com várias distribuições Linux, incluindo o Debian, Arch Linux e
Fedora, também é capaz de navegar na internet e reproduzir vídeos em alta definição, fazer
planilhas, processamento de texto, e também para jogos.
Possui a seguinte configuração:
A 900MHz CPU quadcore ARM CortexA7
1GB de RAM
4 portas USB
40 pinos GPIO
Porta HDMI completa

30
Porta Ethernet
Combinado 3,5 milímetros áudio e vídeo composto
Interface da câmera (CSI)
Interface de exibição (DSI)
Slot para cartão Micro SD
VideoCore IV 3D núcleo gráfico
Porque ele tem um processador ARMv7, ele pode executar toda a gama de
distribuições ARM GNU / Linux, incluindo Ubuntu Snappy Core, bem como o Microsoft
Windows 10.
Figura 13 Imagem do Raspberry Pi2.
(http://raspberrypibra.com/raspberrypibplusmais_tudosobre790.html)
31
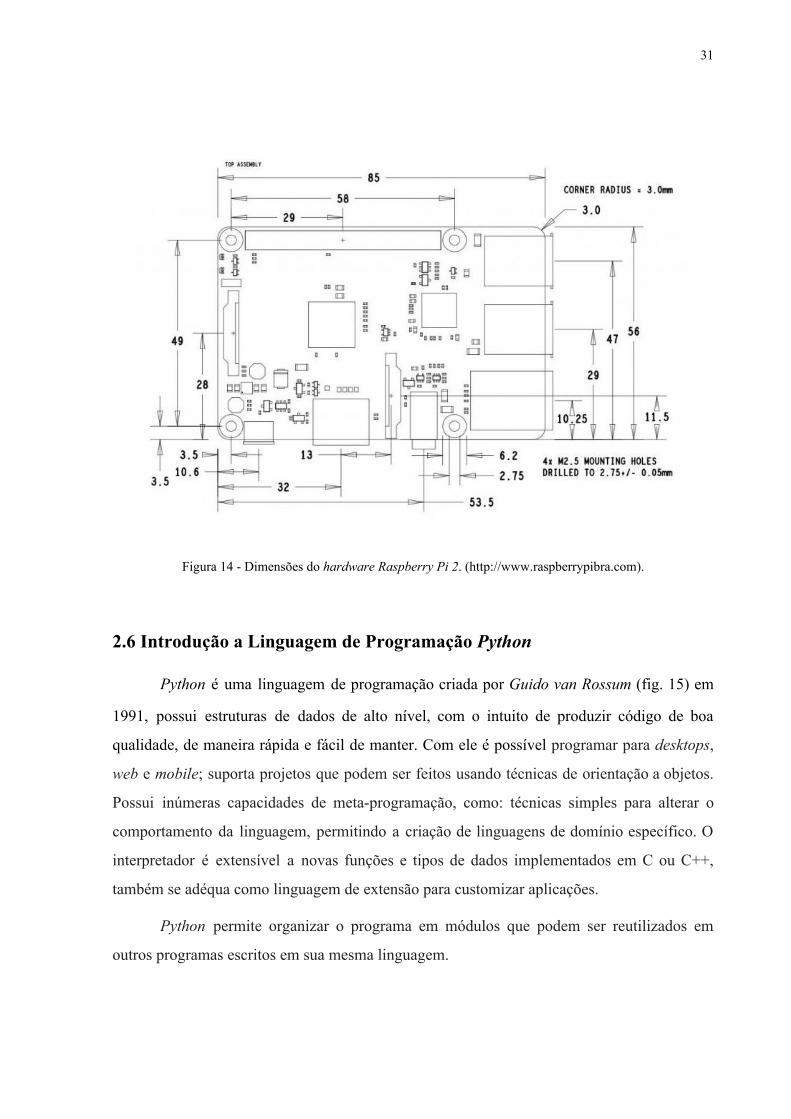
Figura 14 Dimensões do hardware Raspberry Pi 2. (http://www.raspberrypibra.com).
2.6 Introdução a Linguagem de Programação Python
Python é uma linguagem de programação criada por Guido van Rossum (fig. 15) em
1991, possui estruturas de dados de alto nível, com o intuito de produzir código de boa
qualidade, de maneira rápida e fácil de manter. Com ele é possível programar para desktops,
web e mobile; suporta projetos que podem ser feitos usando técnicas de orientação a objetos.
Possui inúmeras capacidades de metaprogramação, como: técnicas simples para alterar o
comportamento da linguagem, permitindo a criação de linguagens de domínio específico. O
interpretador é extensível a novas funções e tipos de dados implementados em C ou C++,
também se adéqua como linguagem de extensão para customizar aplicações.
Python permite organizar o programa em módulos que podem ser reutilizados em
outros programas escritos em sua mesma linguagem.

32
Mesmo não tendo estudado Python anteriormente a este projeto, esta linguagem de
programação foi escolhida pelo grupo por ter algumas semelhanças com a linguagem C, que
faz parte da ementa do nosso curso. Mas o principal motivo foi a integração da linguagem
com o Sistema Operacional Raspbian. Isto nos da maior praticidade e também suporte dos
próprios desenvolvedores do sistema, além de maior quantidade de informações disponíveis
nos fóruns de desenvolvimento.
Figura 15 Guido van Rossum.
Criador da Linguagem de Programação Python (https://www.python.org/~guido/)
2.7 Hardware GPIO
Os GPIO são os pinos (entrada / saída) doRaspberry Pi 2, que constitui uma estrutura
física de 40 pinos que possibilitam ativar e desativar (entradas) ou ligar e desligar (saídas).
Desses 40 pinos apenas 26 são de GPIO, 2 pinos ID EEPROM e os demais são de GND e
saídas de 3,3 e 5 volts como pode ser observado nas (fig. 16 e 17).

33
Figura 16 – Pinagem do RaspberryPi 2.
(https://www.raspberrypi.org/documentation/usage/gpioplusandraspi2/).
Figura 17 – Pinagem do Hardware Raspberry Pi 2.
(https://www.raspberrypi.org/documentation/usage/gpioplusandraspi2/).
As saídas GPIO possibilita o acionamento de pequenos circuitos fazendo o papel de
chave de acionamento. Um exemplo que podemos destacar é o acionamento de um LED,
utilizando uma saída de nível lógico alto (HIGH) teremos uma tensão de alimentação de 3,3
volts no ânodo e GND no cátodo como apresentado na (fig 18).
Figura 18 – Configuração para Piscar um LED
(https://www.raspberrypi.org/documentation/usage/gpioplusandraspi2/).

34
2.8 Visão Computacional
É o conjunto de métodos e técnicas utilizadas nos sistemas computacionais para serem
capazes de interpretar imagens. Essas imagens são conjuntos estruturados de dados digitais
que, uma vez obtidos podem representar em um sinal mono, bi, tri ou tetra dimensional, todas
as suas características.
No campo da Visão Computacional, temos ferramentas que permitem uma simulação
de concepção de imagens. Essas ferramentas são algoritmos que em conjunto permitem a
elaboração do reconhecimento dos objetos da imagem de maneira que o computador entenda
as características do contexto dos dados obtidos. Os algoritmos são divididos em alguns
grupos, como filtro de contraste, detectores de bordas de objetos, segmentadores de imagens
em regiões, classificadores de texturas, entre outros.
Para fazer uso das ferramentas citadas existem frameworks open source para a
construção de aplicações de visão computacional. Isso elimina a necessidade de aprender
sobre profundidade de bits, formatos de arquivo, espaços de cor, gerenciamento de buffer,
valores próprios, entre outros métodos e técnicas da Visão Computacional.
No desenvolvimento do algoritmo deste projeto, fizemos a utilização de um
framework chamado SimpleCV, que inclui uma gama de bibliotecas para processamento e
tratamento de imagens.
35
3 DESENVOLVIMENTO DO PROJETO
Ao longo de nossa trajetória, no desenvolvimento deste trabalho, analisamos e
discutimos quais seriam os problemas plausíveis de serem resolvidos através do nosso
trabalho de conclusão de curso. A partir dessa discussão, podemos observar as dificuldades e
as respectivas ferramentas para sua solução.
Observamos que em nosso sistema são necessárias informações sobre o condutor.
Informações essas que expressem as suas características quando conduzindo o veículo, das
quais as mais importantes são: altura dos olhos do condutor, distância do entre o condutor e o
volante, distância entre o condutor e a lateral do veículo. Com essas informações, é possível
calcular as coordenadas da posição do condutor, para assim definir o ajuste adequado ao seu
perfil através das leis da Física da Reflexão em conjunto com as regras básicas
trigonométricas.
Após pesquisas sobre sensores e outras ferramentas para fazer a aquisição destes
dados, chegamos à conclusão de que um sistema de captura de imagens seria muito útil ao
desenvolvimento de nosso projeto, possibilitando a aquisição dos dados por apenas um
mecanismo. Porém, ao longo dos estudos sobre processamento de dados de imagens,
percebemos que seria necessário um hardware que suportasse a manipulação de grandes
volumes de dados. Então fomos orientados a fazer autilização de um processador em nosso
trabalho.
Por esse motivo fizemos a aquisição da placa de desenvolvimento Raspberry Pi 2
modelo B. Esta placa conta com os recursos necessários para o desenvolvimento do projeto,
além de conter diversos periféricos integrados que permitem maiores expansões para o
sistema. Além de contar com a possibilidade de instalação de uma variedade de sistemas
operacionais, facilitando todo o trabalho, pois elimina a necessidade de uma plataforma
paralela para o desenvolvimento da programação do algoritmo.
Logo após essa etapa, começamos a elaborar o sistema que faz a atuação nos
retrovisores elétricos. Para que isto fosse possível, após a aquisição do espelho retrovisor do
veículo Volkswagen Fox 2009 (Fig.19), estudamos o seu circuito e identificamos a

36
necessidade da utilização de um circuito Ponte H, para receber os parâmetros enviados através
da placa e atuar nos retrovisores, finalizando o sistema de automatização.
Figura 19 Espelho retrovisor Fox 2009 usado no projeto.
3.1 MATERIAIS Foram utilizados para confeccionar esse projeto os seguintes materiais:
Câmera LeaderShip REF 3810;
Especificações:
o 5 Mega Pixels;
o Formato do vídeo: RGB 24 Bits (True Color);
o 30fps em CIF / 10 ~15fps em VGA.
Placa Raspberry pi
Especificações:
o Raspberry pi 2 Model B;
o A 900MHz quadcore ARM CortexA7 CPU;
o 1GB RAM;
o Periféricos: 4 USB ports, 40 GPIO pins e Slot microSD;

37
o Consumo: 1.8A @ 5V (DC).
Para a confecção do circuito Ponte H:
8 TIPs 122;
4 Resistências de 510 ohms;
4 Foto Acopladores (PC 815 Sharp).
Espelho retrovisor (VWFox 2009)
Não temos informações detalhadas da ficha técnica do produto.
Software:
o RASPBIAN Wheesy (Version May 2015 Kernel Version 3.18).
FrameWork Open Source SimpleCV.
Python v2.7.
3.2 Metodologia
Este projeto é construído com características que o definem como um sistema de
malha aberta, onde temos: dados de entrada ao sistema, o processamento desses dados e o
posterior sinal de saída. Ficando assim:
Figura 20 – Analize do Projeto como um Sistema de Malha Aberta.

38
Como podemos ver, os dados de entrada são imagens. Essas, são capturadas do
interior do veículo a fim de encontrar o condutor. Para isto, o posicionamento da câmera deve
ser estratégico, capturando somente a área necessária. Como é ilustrado a seguir:
Figura 21 – Configuração do Posicionamento da câmera vista do condutor.
Figura 22 – Configuração do Posicionamento da câmera vista da lateral.
Desta forma é possível limitar o campo de captura da imagem apenas ao condutor,
evitando possíveis fatores de interferência para o software, como passageiros nos bancos
adjacentes.

39
Após a captura da imagem através da câmera, nosso algoritmo vai procurar as
características importantes presentes na imagem, que são necessárias para o cálculo do ajuste
dos espelhos retrovisores. É importante enfatizar que este é um dos passos mais demorados,
pois é preciso que o programador tenha um certo conhecimento sobre manipulação de
imagens. Porém, não é necessário criar todo um modelamento matemático para este sistema,
visto que as bibliotecas fornecidas pelo framework SimpleCV trazem uma grande gama de
funções que facilitam a programação.
3.3 Criação do Algoritmo
Após a captura da imagem, nosso algoritmo faz o seu tratamento através de um código
desenvolvido com base em alguns modelamentos matemáticos, como a Transformada de
Hough Circles ou Também o Algoritmo Canny, Edge Detection, entre outros. Estes códigos
são embutidos na biblioteca doSimpleCV, e para que seja usado basta chamar a função dentro
do texto de programação do algoritmo, sempre seguindo as regras de suas respectivas sintaxis.
A seguir é dado um exemplo com a clássica foto usada pelos estudiosos da visão
computacional conforme (fig. 23). Onde após a aplicação do algoritmo de busca de face, ou
mais conhecido como face tracking, a área do rosto é destacada como pode ser observado na
(fig. 24).
Figura 23 – Simulação da imagem capturada, antes do processamento. (http://docs.opencv.org/2.4.5/doc/tutorials/introduction/desktop_java/java_dev_intro.html)

40
Figura 24 – Simulação Resultado da imagem capturada, após o processamento.
(http://docs.opencv.org/2.4.5/doc/tutorials/introduction/desktop_java/java_dev_intro.html)
Ao implementarmos nosso código, utilizamos a mesma técnica utilizada no exemplo
acima, porém, o resultado desejado não é o destaque ao redor do rosto, mas sim um sinal que
informe a presença da face do condutor na imagem capturada. Isto deve ser feito para que o
sistema possa ser acionado, executando assim a sua função.
A seguir temos o Pseudo Código, explica mais claramente a lógica desenvolvida, para
o acionamento do sistema, veja:
while 1:#(Loop infinito) img = ImagemCamera()#(Captura da Imagem) Rosto = img.EncontrarFaces('Face')#(Função que detecta face) if Rosto_encontrado:#(Verifica se a Face foi encontrada)
Aciona_GPIO()#(Função para o acionamento dos Pinos GPIO da Placa)
Analizando o código acima, observamos que após o laço de loop infinito fazemos a
captura da imagem. Esta imagem é enviada como parâmetro para a função“EncontraFaces”,
função esta que faz a análise das formas encontradas na foto, procurando a presença de
“objetos” característicos da face humana, como orelhas, nariz, olhos, boca, entre outros. Após
41
encontrar ou não estas características, a função retorna um valor que indica o resultado, sendo
que este valor é guardado na variável “Rosto” para ser posteriormente analizada.
Na análise, testamos a variável e o resultado é o que indica se o controle será ou não
feito. Caso sejam encontradas as características de um rosto na imagem o resultado desta
verificação de condição será positivo, liberando a atuação nos espelhos pelo controle
autônomo. Caso contrário, o programa volta ao laço de repetição, fazendo novamente a
captura e análise das imagens do veículo.
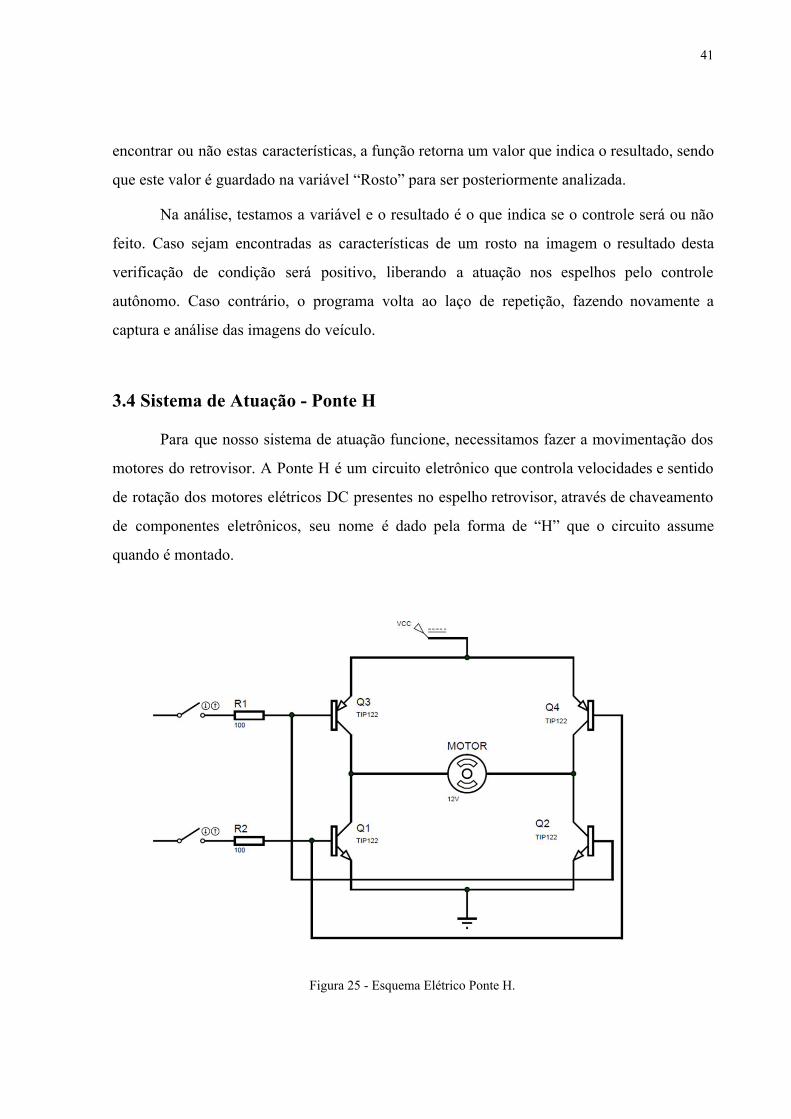
3.4 Sistema de Atuação Ponte H
Para que nosso sistema de atuação funcione, necessitamos fazer a movimentação dos
motores do retrovisor. A Ponte H é um circuito eletrônico que controla velocidades e sentido
de rotação dos motores elétricos DC presentes no espelho retrovisor, através de chaveamento
de componentes eletrônicos, seu nome é dado pela forma de “H” que o circuito assume
quando é montado.
Figura 25 Esquema Elétrico Ponte H.
42
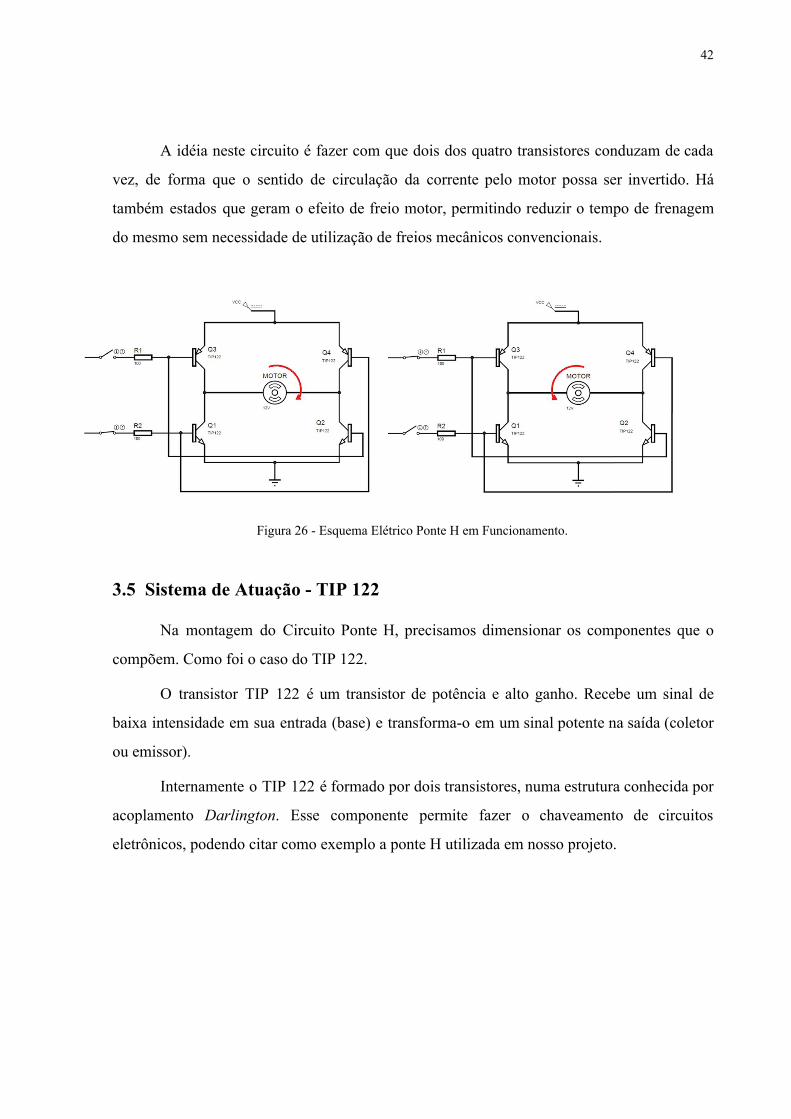
A idéia neste circuito é fazer com que dois dos quatro transistores conduzam de cada
vez, de forma que o sentido de circulação da corrente pelo motor possa ser invertido. Há
também estados que geram o efeito de freio motor, permitindo reduzir o tempo de frenagem
do mesmo sem necessidade de utilização de freios mecânicos convencionais.
Figura 26 Esquema Elétrico Ponte H em Funcionamento.
3.5 Sistema de Atuação TIP 122
Na montagem do Circuito Ponte H, precisamos dimensionar os componentes que o
compõem. Como foi o caso do TIP 122.
O transistor TIP 122 é um transistor de potência e alto ganho. Recebe um sinal de
baixa intensidade em sua entrada (base) e transformao em um sinal potente na saída (coletor
ou emissor).
Internamente o TIP 122 é formado por dois transistores, numa estrutura conhecida por
acoplamento Darlington. Esse componente permite fazer o chaveamento de circuitos
eletrônicos, podendo citar como exemplo a ponte H utilizada em nosso projeto.

43
Figura 27 TIP 122 Circuito Interno. (http://www.alldatasheet.com/).
3.6 Sistema de Atuação Fotoacopador PC 815 Sharp
O fotoacoplador é um componente eletrônico muito utilizado entre circuitos de
impedâncias e potencialidades diferentes. Ele permite realizar o isolamento entre entrada e
saída de dois circuitos e foi utilizado em nosso projeto para a proteção do sistema impedindo
que seja danificada as saídas GPIO do Raspberry Pi 2. Quando inserida uma alimentação na
entrada 1 (ânodo) e um sinal terra na entrada 2 (cátodo) o LED acende emitindo luz a base do
fototransistor que permite a passagem de corrente elétrica da entrada 4 (emissor) para a saída
4 (coletor), quanto maior a intensidade de luz recebida pelo fototransistor mais corrente ele
permitirá passar.
Figura 28 Fotoacoplador PC 815 Sharp. Imagem com alterações (http://www.megacomponentes.com.br/produto/030956/cifotoacopladortlp621grtoshiba).

44
3.7 Configuração do Raspberry Pi 2
A nossa placa de desenvolvimento Raspberry Pi 2, foi adquirida sem qualquer outro
produto adicional oferecido pela desenvolvedora. Desta forma, fizemos toda a configuração e
instalação do Sistema Operacional dosSoftwares e dos componentes utilizados para compor a
placa. É importante citar os equipamentos básicos necessários para o funcionamento do
sistema da placa e as configuracões e modificações feitas.
Cabo HDMI Isto permite que o usuário tenha acesso visual a área de trabalho do
sistema operacional e uma melhor interatividade. Não é exatamente necessário para
todas as aplicações, o sistema pode operar normalmente sem um monitor, por
exemplo, em projetos que não necessitem de interface gráfica. Porém, é fundamental
para as configurações inicias da placa.
Cabo deInternet Necessário para a conexão com a internet onde estão hospedados os
arquivos para download e configuração de diversas funções do HW(Hardware).
Mouse e teclado São necessários para a interação do usuario com o Sistema
Operacional. Outras formas de interaçõ podem ser desenvolvidas pelo usuario, mas
essas são essenciais para as primeiras configurações. Qualquer teclado oumouse com
modelo Standard USB funcionarão incluindo Wireless.
Fonte de Alimentação Este é um dos itens mais importantes, pois sem uma
alimentação adequada o projeto pode ter um mau comportamento. É extremamente
necessário que forneça no mínimo 5V e 700 mA, para que haja o funcionamento
correto.
Sistema Operacional O site oficial do Raspberry Pi 2 oferece uma gama de opções
de diferentes OS’s para a instalação no seu hardware. No nosso caso foi instalado o sistema
recomendado pela própria empresa, o Raspbian. Este é uma variante do O.S Debian. O
sistema (Raspbian) é desenvolvido e ajustado especificamente para a placa de
desenvolvimento Raspberry Pi 2, assim como outros OS’s disponíveis para download no site.
Configuração do MicroSD Tendo em mãos os arquivos do download, precisamos
formatar o cartão de memória. Porém o tipo de formatação sugerido pelo site, requer
uma ferramenta chamada SDformater que faz uma melhor formatação do dispositivo

45
de memória MicroSD.
Após esta etapa, fazemos a transferência dos arquivos do O.S. para a raiz do MicroSD.
Estes arquivos são necessários para a instalação do S.O. para que a placa funcione
adequadamente.
Uma curiosa e importante informação é que os sistemas operacionais de base linux
podem ser instalados em uma mídia portátil e utilizados em diferentes computadores,
sendo que o boot é efetuado a partir dessa mídia chamada muitas vezes de “Mídia
Bootável”. No Raspberry Pi isto também acontece quando o sistema operacional
utilizado é suportado oficialmente. Por isto, possivel ter vários Cartões MicroSD com
as diferentes distribuiçoes oferecidas no site official.
Configuração do Teclado(Padrão ABNT2) O teclado na edição do Debian utilizada
neste projeto não possui um campo especifico para sua configuração. Por isso,
podemos ir diretamente nos arquivos do sistema e editarlos.
No terminal digitamos:
#sudo nano /etc/default/keyboard
E apagamos todo o texto presente e colamos os seguintes parametros:
XKBMODEL="abnt2"
XKBLAYOUT="br"
XKBVARIANT=""
XKBOPTIONS="lv3:alt_switch,compose:rctrl"
Instalação das Bibliotecas do GPIO O acesso aos I/Os é possivel atraves das
bibliotecas. No terminal:
$sudo aptget install python3pip python3w1thermsensor python3spidev
$sudo pip3.2 install gpiozero
Isto instala as bibliotecas no sistema e pode ser acessado pelo terminal e tambem pela
IDE do Python.

46
3.8 Desenvolvimento do Hardware
A webcam do nosso sistema captura imagens do ambiente simulando o interior do
veículo de quando há e quando não há condutor. Depois de detectado as caracteristicas nessas
imagens, ou seja, após um condutor entrar no carro, nosso software que está embutido no
Raspberry PI 2 envia os sinais de comandos através das saídas GPIO para ao CI
fotoacoplador PC815 que é ativado, permitindo que a ponte h entre em operação, fazendo
com que os motores elétricos (DC) do espelho retrovisor sejam ativados projetando a lente do
espelho para cima ou para baixo e para a esquerda ou direita de acordo com o comando
recebido.
No desenvolvimento do projeto o grupo utilizou para testes em bancada o espelho
retrovisor elétrico do veículo Fox 2009, que é constituído de 2 motores elétricos DC e
conector com 3 fios para alimentação. O grupo não tinha disponível o diagrama elétrico do
veículo Fox 2009 e através de pesquisas em fóruns obtivemos o do veiculo Golf, que possui
um conector de 4 fios, sendo que estão distribuídos da seguinte forma: entrada n°2 do
conector de alimentação tem ligação comum aos motores elétricos DC, a entrada n°1 e n°3
são independentes e apresentam inversão de polaridade que é comutada através de um sistema
de controle disponível para o usuário do veículo durante o ajuste dos espelhos retrovisores
elétricos, a entrada de alimentação n°4 é para atuação de uma resistência elétrica do
desembaçador do espelho retrovisor conforme apresentada na (fig. 29).

47
Figura 29 – Diagrama Elétrico do Espelho Retrovisor do Veículo Golf.
(http://www.clubegolfpt.com/forum/viewtopic.php?t=96885).
Com o auxílio de uma fonte de alimentação 12 volts/DC e o diagrama elétrico em
mãos, o grupo iniciou os testes em bancada para reconhecimento da polaridade através da
atuação dos motores elétricos (DC), onde se comprovou que o diagrama elétrico do Golf é
aplicável aos testes. Os resultados obtidos através dos testes de polaridade realizados no
espelho retrovisor elétrico estão descritos na (tab. 01).

48
TESTES DE POLARIDADE
ENTRADA 1 ENTRADA 2 ENTRADA 3 SENTIDO DE MOVIMENTAÇÃO DO ESPELHO
+ off ↑
+ off ↓
off + →
off + ←
Tabela 01 – Teste de Polaridade do Circuito do Espelho Retrovisor Elétrico Esq uerdo. (fonte: Autor)
Figura 30 Imagem Ilustrativa das Posições do Espelho. (fonte autor)

49
Figura 31 Ligação para Atuação do Espelho Retrovisor. (fonte: autor)
Os pontos A e B dos circuitos de atuação da ponte H1/H2 estão conectados ao
terminal 3 das saídas dos fotoacopladores PC 815 confome indicado na (fig. 28). O
Raspberry Pi 2 realiza o acionamento dos fotoacopladores que passam a permitir passagem de
corrente elétrica de seu terminal 3 conectado a fonte de 12 volts/DC ao terminal 4, com isso,
permitindo chaveamento dos transistores TIP122 que assumem o papel de inversão de
polaridade das saídas de atuação da ponte H.
O circuito de hardware implementado pelo grupo é constituído de duas pontes H, com
duas entradas de controle A e B e três saídas para atuação dos motores elétricos DC do
espelho retrovisor (totalizando 4 entradas e 3 saídas).
A estratégia de implementação do hardware se tornou nessária devido as
características construtivas do espelho retrovisor elétrico, que possui uma ligação interna

50
comum entre os dois motores elétricos DC que pode ser visualizado no diagrama elétrico do
veículo Golf apresentado na (fig.29).
Através de pesquisas em sites e fóruns diversos observouse que não tinha disponível
nenhum diagrama ou circuito elétrico para a construção de uma ponte h dupla com 3 saídas de
controle, pois a mesma não é comercial, sendo que foi uma das maiores necessidades do
grupo para o acionamento do espelho retrovisor elétrico. Devido as essas necessidades citadas
o grupo recorreu a uma análise detalhada do diagrama elétrico de uma ponte h dupla
convencional de 4 saídas de controle e observou que poderia adotar a seguinte intervenção:
união das saídas Q4/Q2 da ponte H1 com a saída Q4/Q2 da ponte H2, dando origem a uma
ponte h dupla com 3 saída de atuação, sendo uma delas comum e duas independentes, que
atenderam as condições de funcionamento do projeto dando origem aohardware destacado na
(fig. 32).
Figura 32 Diagrama Elétrico da Ponte Dupla Implementada Conectada ao Espelho Retrovisor Elétrico. (Fonte:
Autor)

51
Figura 33 Circuito Ponte H Dupla. (fonte autor)
Valores de consumo de corrente obtidos através dos testes de bancada.
Medições realizadas com o auxílio de um multimetro digital configurado na escala de corrente
continua (10A).
A primeira etapa para se realizar a medição de corrente consumida pela base do
transistor TIP 122 foi realizar a abertura do circuito elétrico e ligar em série as pontas de
prova do multimetro. O resultado obtido foi um consumo de 0.01A (10mA) no momento do
acionamento, quando o motor elétrico DC atingiu o seu fim de curso ocorreu um aumento no
consumo de corrente na base do transistor para 0.02A (20mA), como apresentado na (fig. 34).

52
Figura 34 Valores de Consumo de Corrente Transistor TIP122. (fonte autor)
A segunda etapa foi realizar a medição de corrente consumida pelos motores elétricos
DC, onde também foi necessária abertura do circuito elétrico e ligar em série as pontas de
prova do multimetro. O resultado obtido foi um consumo de 0.09A (90mA) no momento do
acionamento, quando o motor elétrico DC atingiu o seu fim de curso ocorreu um aumento no
consumo de corrente 0.170A (170mA), como apresentado nas (fig. 35, 36, 37 e 38).
Figura 35 Consumo de Corrente Acionando Motor Elétrico para Direita. (fonte autor)

53
Figura 36 Consumo de Corrente Acionando Motor Elétrico para Esquerda. (fonte autor)
Figura 37 Consumo de Corrente Acionando Motor Elétrico para Baixo. (fonte autor)

54
Figura 38 Consumo de Corrente Acionando Motor Elétrico para Cima. (fonte autor)
Corrente consumida pelos motores elétricos DC no acionamento (A Ampér)
Acionamento para Direita Consumo Inicial 0,09 / Consumo Final 0,170
Acionamento para Esquerda Consumo Inicial 0,09 / Consumo Final 0,140
Acionamento para Baixo Consumo Inicial 0,09 / Consumo Final 0,150
Acionamento para Cima Consumo Inicial 0,09 / Consumo Final 0,160
Tabela 02 – Medição de Consumo de Corrente dos Motores Elétricos DC . (fonte: Autor)
3.9 Resultados Obtidos
Mesmo com dificuldades em linguagem Python e visão computacional, podemos
destacar que conseguimos desenvolver a idéia, foi criado um algoritmo e feito um hardware
de atuação, desenvolvido pelo próprio grupo, pois não existe um com este tipo de
configuração vendido comercialmente. Com as informações disponíveis nesse material é
possível dar prosseguimento as atividades e evoluir no projeto.

55
3.10 Dificuldades no Desenvolvimento do Projeto
Visão Computacional;
Todos os nossos conhecimentos sobre Visão computacional foram obtidos ao longo
deste projeto, e especificamente para este fim e por não ter conhecimento nesta área o grupo
encontrou bastante dificuldade e precisou buscar informações em fóruns e sites sobre visão
computacional, sendo que muitos deles não disponibilizavam quais as versões de softwares
eram compatíveis com o sistema operacional Raspbian Jessie e gerou um grande atraso no
desenvolvimento do trabalho, impossibilitando a conclusão total do projeto.
Funcionamento do Espelho Retrovisor (características internas de construção);
Uma das maiores dificuldades que o grupo enfrentou para entender funcionamento do
espelho retrovisor elétrico era devido não possuir o seu diagrama elétrico, após conseguir um
do veículo da mesma empresa conseguimos prosseguir realizando os testes de polaridade e
verificando qual o seu consumo de corrente elétrica quando acionado os os motores elétricos
DC .
Linguagem de Programação Python;
A linguagem de programação em Python foi um grande desafio para o grupo, pois foi
a primeira experiência que tivemos com a mesma. Os comandos em Python apresentam uma
sintaxe mais limpa, funciona em diversos tipos de plataformas, é open source e possui um
interpretador que ajuda e muito na aprendizagem. O que ajudou e muito o novo aprendizado
dessa linguagem foi o fato de conhecermos a linguagem em C e lógica de programação,
possibilitando uma assimilação mais rápida.
Conhecimento Sobre o Funcionamento e Configuração do Raspberry Pi 2;
A grande parte das informações referentes ao funcionamento e configuração do
Raspberry Pi 2 estão disponíveis no site (https://www.raspberrypi.org/). As dificuldades
encontradas foram na instalação do sistema operacional no MicroSD, pois o cartão de
memória devia ser formatado com uma ferramenta chamada SDformater antes de iniciar a
instalação de qualquer software. Esse procedimento foi transmito pelo nosso orientador MSc
Murilo Zanini que já havia feito uso da ferramenta.

56
Aprendizagem de Comandos Linux;
As dificuldades do grupo em aprender o sistema operacional Linux é devido
conhecermos poucas pessoas que fazem o seu uso no cotidiano e não termos esse tipo de
contato durante o curso. Os computadores disponíveis em nossa instituição de ensino utilizam
o SO Windons e isso gera uma comodidade ao aluno que não vê necessidade em utilizar outro
sistema. Como nosso projeto opera em plataforma Linux o grupo encarou o desafio e fez
consultas em sites e fóruns que abordam a aprendizagem desse sistema, absorvendo os
conhecimentos necessários para utilizar o mesmo em nosso projeto.
Integração de Software de Visão Computacional ao Raspberry Pi 2.
Esta etapa do projeto foi realmente cansativa, pois as configurações e instalações de
quais quer aplicativos nesta plataforma são feitos manualmente, e muitas vezes os
conhecimentos sobre o SO são necessários para que isto ocorra com efetividade. Também
foram encontrados muitos erros em sites,blogs e até mesmo fóruns quando procuramos ajuda.
Grande parte do conteúdo oferecido por eles não era totalmente fiél ao apresentar as soluções,
faltando muitas vezes informações sobre versão do programa, versão do SO, distribuição
usada, e outros ainda ofereciam parcialmente as informações como forma de cativar o
interessado e promover a venda de seus produtos. Isto acabou por nos fazer desprender muito
tempo ao longo do desenvolvimento do projeto. Por isso, é de extremamente importante
procurar os forúns dos sites oficiais para um suporte de qualidade e agilidade ao longo de
qualquer projeto.
Neste trabalho fizemos a tentativa de instalação de três Softwares de Visão
Computacional o SimpleCV, o OpenCV e o ImagePi, porém somente um (ImagePi) foi
instalado com sucesso e mesmo assim não atendia aos requisitos para a execução do projeto,
pois é um Software ainda em desenvolvimento, feito usando como base as bibliotecas do
OpenCV.
O SimpleCV foi escolhido para o projeto por oferecer uma grande quantidade de
funções preparadas previamente pelo desenvolvedor. Isto nao é comum para o OpenCV que
mesmo oferecendo uma enorme quantidade de funções não oferece conteúdo tão simplificado
quanto.

57
4 CONSIDERAÇÕES FINAIS
Em relação à proposta inicial do projeto, o grupo atingiu de forma parcial a contrução
de um sistema de controle autônomo para atução espelhos retrovisores elétricos, onde
desenvolvemos um algoritmo e um hardware que possibilita trabalhar em conjunto com o
Raspberry Pi 2. O processamento de imagem não foi possível devido as dificuldades do grupo
em encontrar documentações em sites, fóruns e blogs indicando quais as versões desoftwares
de processamento de imagem eram compatíveis com o sistema operacional Raspbian,
consumindo muito tempo durante o desenvolvimento do projeto. Porém a realização do
trabalho de conclusão de curso proporcionou ao grupo um grande aprendizado, podendo se
destacar: visão computacional, programação em linguagem Python, análise e implementação
de hardware como o realizado na ponte h dupla, e também configuração e manipulação do
Raspberry Pi 2 as necessidades do projeto.
Esses novos aprendizados também foram possíveis devido à base de conhecimento
técnico, teórico e prático que as disciplinas ministradas na Fatec Santo André proporcionam
ao aluno, o colocando em situações que o mesmo precisa utilizar de diversos recursos como
pesquisas e consultas a materiais cientificos, forçando o mesmo ir em busca de novos
conceitos e soluções para os problemas enfrentados nos diversos segmentos do mercado.
58
4.1 Propostas Futuras
De modo a dar continuidade a este desenvolvimento, sugerimos algumas propostas de
trabalhos futuros:
Instalação do sistema desenvolvido em um veículo;
Capturar uma imagem do condutor e identificar o posicionamento dos olhos,
implementando um algoritmo para o ajuste autônomo dos espelhos retrovisores
conforme o campo de visão;
Criar um banco de dados com todos condutores desse veículo e armazenar as
informações sobre o último posicionamento dos retrovisores;
Implementação do sistema no retrovisor direito e no retrovisor interno.

59
REFERÊNCIAS
BROEDEL, Alex. SANTOS, Herbert Gomes dos “Sistema de auxílio de estacionamento modularizado com protocolo CAN” Monografia apresentada ao Curso de Tecnologia Autotrônica da FATEC Santo André; SP, 2011. Disponível em: <http://www.fatecsantoandre.com.br/sdade.pdf>. Acesso em 20 mar. 2015
BOSCH, Manual de Tecnologia Automotiva 25º ed. Editora Edgard Blücher; 2005. Acesso em 20 mar. 2015.
RISOVAS, Tatiana Regina. “Análise da viabilidade quanto à aplicação de sistemas ao motorista no mercado brasileiro”. Monografia – Pós Graduação em Engenharia Automotiva Centro Universitário do Instituto Mauá de Tecnologia, São Caetano do Sul, SP, 2013. Disponível em: <http://maua.phlnet.com.br/cgibin/wxis.exe?IsisScript=phl82.xis&cipar=phl82.cip&lang=por>. Acesso em 22 mar. 2015.
MARTINS PEREIRA, Gabriel Espírito Santo “Desenvolvimento de uma metodologia para análise comparativa de visibilidade automotiva”; Universidade de São Paulo. Dissertação de mestrado; 2007. Disponível em: <http://www.automotivapoliusp.org.br/tcc/desenvolvimentodeumametodologiaparaanalisecomparativadevisibilidadeautomotiva3/>. Acesso em 22 mar. 2015
GOMES, Felipe de Oliveira and SOUZA, Rodrigo Ferreira de Lima Lino de“Segurança veicular ativa de monitoramento do motorista”. Monografia apresentada ao Curso de Tecnologia Autotrônica da FATEC Santo André; SP, 2013. Disponível em: <http://www.fatecsantoandre.com.br/2013GOMESSOUZA.pdf>. Acesso em 28 mar. 2015
ESPELHO RETROVISOR. Disponível em: <http://fr.topictopos.com/retroviseurgifsuryvette>. Acesso em 25 mar. 2015
SERÁ QUE RAY HARROUN INVENTOU REALMENTE O ESPELHO RETROVISOR? Disponível em: <http://rickdebruhl.com/?p=536>. Acesso em 07 abr. 2015
QUANDO INDIANAPOLIS INVENTOU O ESPELHO RETROVISOR. Disponível em: <http://www.totalrace.com.br/site/retrovisor/2012/05/quandoindianapolisinventouoespelhoretrovisor>. Acesso em 07 abr. 2015
O QUE É UMA PONTE H? Disponível em: <http://lusorobotica.com/index.php?topic=262.0>. Acesso em 13 jul. 2015

60
SILVA, Marcio de Puccio “Evolução de produtos automotivos: o caso do conjunto espelho retrovisor externo” Dissertação de Mestrado Profissional da Faculdade de Engenharia Mecânica da Universidade Estadual de Campinas, como requisito para a obtenção do título de Mestre em Engenharia Automobilística, Campinas, SP, 2011. Disponível em: <http://www.bibliotecadigital.unicamp.br/document/?code=000814982>. Acesso em 12/jul. 2015
DATASHEET TIP 122. Disponível em: <http://www.alldatasheet.com/datasheetpdf/pdf/2770/MOSPEC/TIP122.html>. Acesso em 13 jul. 2015
O QUE É PYTHON? Disponível em: <http://pysciencebrasil.wikidot.com/python:pythonoqepq>. Acesso em 06 ago. 2015
APRENDENDO A PROGRAMAR EM PYTHON. Disponível em: <http://www.devmedia.com.br/aprendendoaprogramarempythonintroducao/17093>. Acesso em 06 ago. 2015
Guido van Rossum Fred L. Drake, Jr., editor “Tutorial Python” 23 de novembro de 2005. Acesso em 10 out. 2015
RASPBERRY PI. Disponível em: <https://www.raspberrypi.org/documentation/usage/gpio/README.md>. Acesso em 20 dez. 2015
CARTÃO SD NOOBS. Disponível em: <https://www.raspberrypi.org/downloads/noobs/>.
Acesso em 22 nov. 2015
ACABE COM O PONTO CEGO DO RETROVISOR. Disponível em: <http://www.receitasmalucas.com.br/2012/06/acabecomopontocegodoretrovisordo.html>. Acesso em 12 ago.2015
ESQUEMA ELÉTRICO VW GOLF. Disponível em: <http://www.clubegolfpt.com/forum/viewtopic.php?t=96885/>. Acesso em 10 nov.2015
CONFIGURAÇÃO MICROSD. Disponível em: <https://www.sdcard.org/downloads/formatter_4/>. Acesso em 06 set.2015

61
FOTOACOPLADORES. Disponível em: <http://www.resumosetrabalhos.com.br/optoacopladores.html>. Acesso em: 10 nov.2015
SIMPLECV. Disponível em: <http://loopyn.com.br/blog/detectandofacescomsimplecv/#sthash.XBcSaVtH.dpuf>. Acesso em: 15 nov.2015
ESTUDO DE CASO DO POSICIONAMENTO DO RETROVISOR. Disponível em: <http://www.viasseguras.com/educacao/educacao_e_formacao_dos_motociclistas/manual_de_direcao_defensiva_para_motociclista/capitulo_5_pilotando_a_moto_com_seguranca/motociclista_veja_e_seja_visto> 23/02/2012>. Acesso em: 20 dez. 2015
FACE DETECTION LENA. Disponível em: <http://docs.opencv.org/2.4.5/doc/tutorials/introduction/desktop_java/java_dev_intro.html>. Acesso em: 10 dez. 2015, 12:15.
RASPBERRYPI. Disponível em: <https://www.raspberrypi.org/documentation/usage/gpioplusandraspi2/>. Acesso em: 03 ago. 2015.
Related Documents