Carnegie Mellon | 13 December 2007 1 Testing and Characterization 13-14 December 2007 Carnegie Mellon

Carnegie Mellon | 13 December 20071 Testing and Characterization 13-14 December 2007 Carnegie Mellon.
Dec 16, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Carnegie Mellon | 13 December 2007 1
Testing and Characterization
13-14 December 2007Carnegie Mellon

Scarab Testing & CharacterizationCarnegie Mellon13-14 December 2007
Scott Moreland

Carnegie Mellon | 13 December 2007 3
Characterization
• Mobility– CG xyz, Static tip-over angles– Drawbar Pull– Side slope lean (level) vs. baseline– Straight incline ascent, lowering CG– Obstacles: trenching, boulders, etc..
• Drilling– Gravity off-load Can enough thrust be produced? Resist torques?– Drill thrust/torque extremes simulation– Slopes

Carnegie Mellon | 13 December 2007 4
Vehicle Center of Gravity• X-Y CG
Total Weight: 280 kg• Drill system
mass/CG stand-in• ASRG used to center
vehicle CG
• Z CG Pose Dependent
*nominal
*low
*high

Carnegie Mellon | 13 December 2007 5
Static Tip-Over Angles
*low
*nominal
*high
(values from tilt-table testing)

Carnegie Mellon | 13 December 2007 6
Side Slope
• Side Slopes– Significant increase in traction while
body leveling on side slopes– 25° cross slope results
• 52% decrease in downhill slip
• Important sources of beneficial effects (side hill lean)– Edging of wheels– Equalize wheel pressure distribution
• Actively centering CG over track-base center
• Traction and control

Carnegie Mellon | 13 December 2007 7
Side Slope
• Side Slopes– Significant increase in traction while
body leveling on side slopes– 25° cross slope results
• 52% decrease in downhill slip
• Important sources of beneficial effects (side hill lean)– Edging of wheels– Equalize wheel pressure distribution
• Actively centering CG over track-base center
• Traction and control
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.
Carnegie Mellon | 13 December 2007 8
Straight Hill Ascent
• Straight Ascent (pose vs. angle of refusal)– 25° incline tests:
• refuse at high pose, ascends at nominal/low pose
– Lowering CG through pose change promotes equal normal force distribution in wheels increases angle of refusal
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.

Carnegie Mellon | 13 December 2007 9
Drawbar Pull
•Tested at full vehicle weight, 280 kg
•XY-CG centered
•Rubber skid loader tires
•60 cm diameter
•17 cm tread width
•Coarse Sand:
•160 kg pull
•0.57 vehicle weight
•High Traction Cement
•240 kg pull
•0.85 vehicle weight

Carnegie Mellon | 13 December 2007 10
• Trenching– 50 cm Trench capability– Wheel Diameter, 60 cm
• Boulders
• Periodic obstacles
Obstacles
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.

Carnegie Mellon | 13 December 2007 11
Drilling• Nominal Drilling Test
– Support 1 m drilling into OB-1 lunar regolith simulant with NORCAT system
• Gravity Off-loading– Drill reaction forces simulated while under lunar g
• Drill reaction forces– 350 N max. thrust– 30 Nm torque
• 250 kg Earth 42 kg Lunar (gravity off-loaded)• 42 kg weight – 350 N thrust 6.0 kg Mass Reserve
– Capabilities• Expanded wheel base resists high drill torques
– Failures• Combined loading: Lunar gravity while drilling on
slopes > 15°, leads to downhill slippage• Down hill force rapidly increasing with slope angle
Carnegie Mellon | 13 December 2007 12
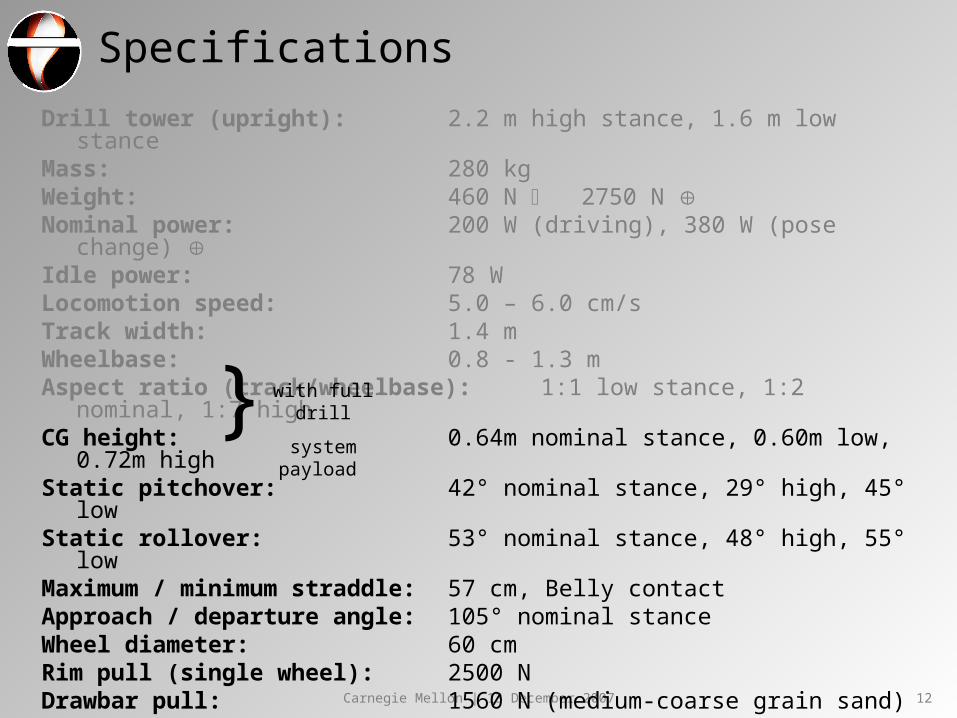
Specifications
Drill tower (upright): 2.2 m high stance, 1.6 m low stanceMass: 280 kg Weight: 460 N 2750 N Nominal power: 200 W (driving), 380 W (pose change) Idle power: 78 WLocomotion speed: 5.0 – 6.0 cm/sTrack width: 1.4 mWheelbase: 0.8 - 1.3 m Aspect ratio (track/wheelbase): 1:1 low stance, 1:2 nominal, 1:7 highCG height: 0.64m nominal stance, 0.60m low, 0.72m
highStatic pitchover: 42° nominal stance, 29° high, 45° low Static rollover: 53° nominal stance, 48° high, 55° lowMaximum / minimum straddle: 57 cm, Belly contactApproach / departure angle: 105° nominal stanceWheel diameter: 60 cmRim pull (single wheel): 2500 NDrawbar pull: 1560 N (medium-coarse grain sand)
} with full drill
system payload
Related Documents