INTRODUCTION Pada makalah kali ini,akan membahas mengenai sistem wearable sensor for human dynamics analysis (Sensor gerakan yang dipakai untuk menganalisa gerakan manusia). Penggunaan sistem wearable sensor ini terutama untuk anggota gerak bawah yaitu kaki. Pembatasan masalah dalam makalah ini antara lain adalah sebagai berikut : 1. Sistem Wearable Sensor 2. Wearable Motion Sensor 3. Perhitungan Momen Sendi 4. Hasil Eksperimen Sensor yang digunakan antara lain adalah gyroscope dan accelerometer.Inti dari makalah ini adalah aplikasi dan pengembangan sensor yang diwujudkan dalam hardware yang digunakan untuk menghitung gaya apa saja yang bekerja pada sistem anggota gerak bagian bawah manusia,perhitungan momen sendi serta bagaimana hasil eksperimen dari penggunaan sistem wearable sensor ini.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
INTRODUCTION
Pada makalah kali ini,akan membahas mengenai sistem wearable sensor for human
dynamics analysis (Sensor gerakan yang dipakai untuk menganalisa gerakan manusia).
Penggunaan sistem wearable sensor ini terutama untuk anggota gerak bawah yaitu kaki.
Pembatasan masalah dalam makalah ini antara lain adalah sebagai berikut :
1. Sistem Wearable Sensor
2. Wearable Motion Sensor
3. Perhitungan Momen Sendi
4. Hasil Eksperimen
Sensor yang digunakan antara lain adalah gyroscope dan accelerometer.Inti dari
makalah ini adalah aplikasi dan pengembangan sensor yang diwujudkan dalam hardware
yang digunakan untuk menghitung gaya apa saja yang bekerja pada sistem anggota gerak
bagian bawah manusia,perhitungan momen sendi serta bagaimana hasil eksperimen dari
penggunaan sistem wearable sensor ini.
Wearable GRF (Ground Reaction Force) Sensor
Desain Mekanis dan Optimalisasi Dimensi
Sistem sensor wearable gaya multi-aksial dengan mekanisme paralel untuk mengukur
gaya reaksi tanah dan momen dalam analisis dinamika manusia. Pertama, mekanisme paralel
untuk merasakan gaya triaksial dan momen gaya diperkenalkan. Seperti ditunjukkan dalam
Gambar 1,sensor terdiri dari bidang bawah x-,y-, dan z-sel beban aksial, dan empat bola.
Ketika gaya dan momen yang dikenakan terhadap bidang bawah, mereka dipindahkan ke
empat bola pendukung. Bola pendukung yang terhubung dengan tiga sel beban melalui
kontak titik.Oleh karena itu, hanya gaya translasi yang dapat dipindahkan ke sel-sel beban
yang sesuai dan diukur dengan menggunakan pengukur regangan yang melekat pada sel
beban.Sel beban x-aksial dapat mengukur FX1 dan FX2. Demikian pula, pengukuran sel
beban y-aksial FY1 dan FY2, sedangkan sel beban z-aksial mengukur FZ1, FZ2, FZ3 dan
FZ4. Berdasarkan nilai-nilai terukur, tiga-sumbu gaya dan momen dapat dihitung dengan
menggunakan persamaan berikut:
Perhitungan gaya dalam arah sumbu x:
F x=Fx 1+F x 2
Perhitungan gaya dalam arah sumbu y :
F y=F y1+F y 2
Perhitungan gaya dalam arah sumbu z :
F z=F z 1+F z 4+F z 2+F z 3
Perhitungan momen gaya masing-masing dalam arah sumbu x,y dan z :
M x= (F z 2+F z 3−F z 1−F z 4 ) L/2
M y=( F z 3+F z 4−F z 1−F z 2 ) L /2
M z=( Fx 2+F y 2−Fx 1−F y 1 ) L /2
Gambar. 1. Gambar skema untuk Sensor baru dengan mekanisme dukungan
paralel.Sel beban transversal terdiri dari dua sel beban x-aksial untuk mengukur FX1 dan
FX2 dan dua sel beban y-aksial untuk mengukur FY1 dan FY2 masing-masing. Sel-sel beban
z di bawah empat bola pendukung di empat penjuru (L = 100mm) dapat mengukur empat
gaya dalam arah z-directional termasuk FZ1, Fz2, FZ3 dan Fz4.
Gambar 2 menunjukkan detail dari sel beban. Dua pengukur regangan melekat pada
sel beban untuk merasakan gaya translasi uniaksial. Dalam rangka untuk mendapatkan
sensitivitas tinggi, pengukur regangan harus didistribusikan pada titik di mana regangan
maksimum terjadi.
Gambar 1
Gambar 2

Wearable Motion Sensor (Sensor Gerakan)
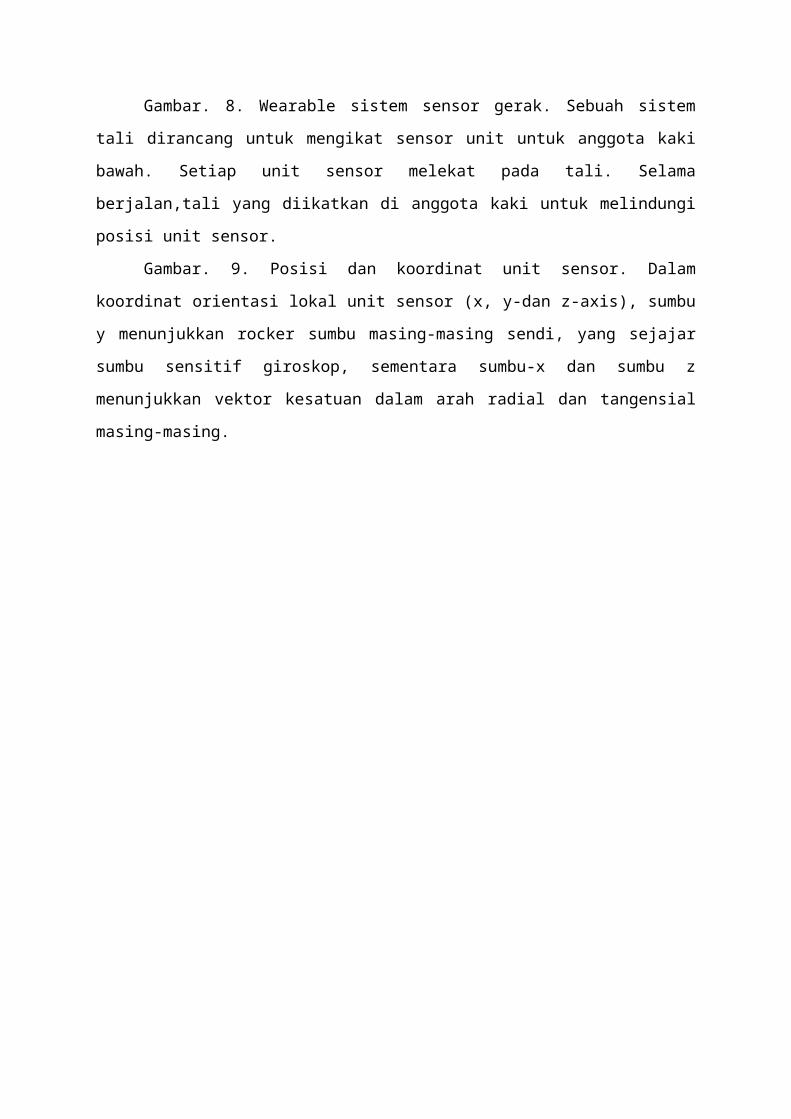
Sistem wearable motion sensor (sensor gerakan) mencakup delapan channel.Data
perekam, giroskop dan unit kombinasi accelerometer, dan giroskop dua unit. Dua unit
giroskop yang melekat pada kaki dan paha masing-masing, dan giroskop dan unit kombinasi
accelerometer adalah tetap pada betis, yang dekat dengan pergelangan kaki. Prinsip
pengoperasian giroskop adalah pengukuran percepatan Coriolis yang dihasilkan ketika sudut
rotasi kecepatan diterapkan pada bimorph piezoelektrik yang berosilasi.Sensor inersia dapat
bekerja di bawah konsumsi energi yang lebih rendah (4,6 mA pada 5V), sehingga sangat
tepat untuk pengukuran rawat jalan. Sinyal dari giroskop dan akselerometer diperkuat dan
disaring menggunakan LPF (lowpass filter) (frekuensi cutoff : 25Hz) untuk menghilangkan
noise elektrik. Frekuensi di luar pass-band yang disaring, karena mereka tidak termasuk
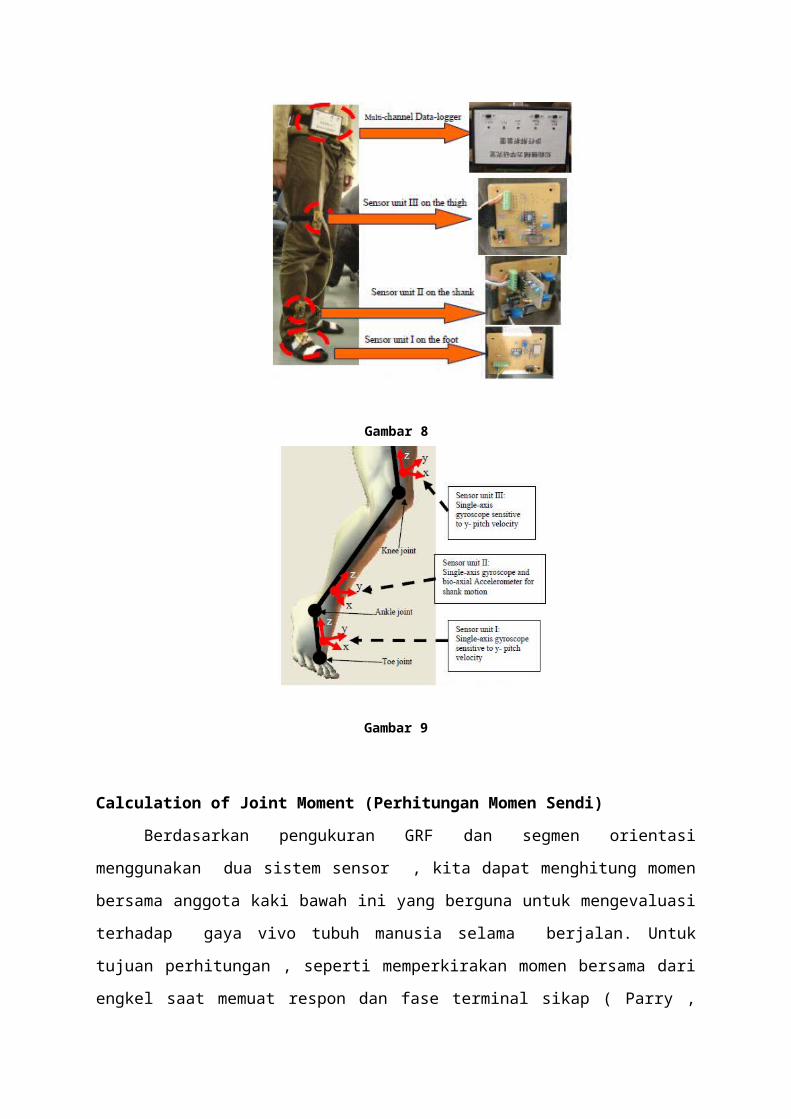
untuk studi kinetika/gerakan manusia. Tiga giroskop yang digunakan untuk mengukur
kecepatan sudut segmen kaki kaki, betis dan paha (ω1, ω2 dan ω3).Sumbu penginderaan
(sumbu y) dari giroskop adalah vertikal ke bidang medial-lateral sehingga kecepatan sudut
pada bidang sagital dapat dideteksi.Bioaxial accelerometer terpasang di sisi betis untuk
mengukur percepatan dua-arah sepanjang arah tangen dari sumbu x (a t) dan arah sagital
sumbu z (ar). dalam hal ini sistem data yang diperoleh dari accelerometer dijadikan satu
dengan data yang dikumpulkan dari giroskop untuk siklus re-kalibrasi, melalui perpindahan
sudut awal bagian yang terpasang di kaki .
Gambar. 8. Wearable sistem sensor gerak. Sebuah sistem tali dirancang untuk
mengikat sensor unit untuk anggota kaki bawah. Setiap unit sensor melekat pada tali. Selama
berjalan,tali yang diikatkan di anggota kaki untuk melindungi posisi unit sensor.
Gambar. 9. Posisi dan koordinat unit sensor. Dalam koordinat orientasi lokal unit
sensor (x, y-dan z-axis), sumbu y menunjukkan rocker sumbu masing-masing sendi, yang
sejajar sumbu sensitif giroskop, sementara sumbu-x dan sumbu z menunjukkan vektor
kesatuan dalam arah radial dan tangensial masing-masing.

Gambar 8
Gambar 9
Calculation of Joint Moment (Perhitungan Momen Sendi)
Berdasarkan pengukuran GRF dan segmen orientasi menggunakan dua sistem sensor
, kita dapat menghitung momen bersama anggota kaki bawah ini yang berguna untuk
mengevaluasi terhadap gaya vivo tubuh manusia selama berjalan. Untuk tujuan
perhitungan , seperti memperkirakan momen bersama dari engkel saat memuat respon dan
fase terminal sikap ( Parry , 1992 ) ,semua vektor termasuk vektor perpindahan bersama,
GRF vektor dan vektor gravitasi harus dinyatakan dalam sistem koordinat yang sama,menjadi
sistem koordinat global. Y - sumbu global sistem koordinat dipilih untuk mewakili arah
anterior - posterior gerakan manusia, dan sumbu z dibuat vertikal , sedangkan sumbu x
dipilih sedemikian rupa sehingga mengakibatkan sistem koordinat global akan menjadi
tangan kanan.Asal usul global sistem koordinat tetap ke sekitar titik anatomi pusat
pergelangan kaki ketika sensor gaya yang dipakai berada di bawah kaki . GRF (Ground
Reaction Force) dan momen saat diukur dengan menggunakan sensor gaya yang dapat
dipakai diekspresikan oleh vektor-vektor pada ( 23 ) , dan koordinat pusat tekanan ( CoP ) g X
CoP dalam bingkai global dihitung dengan menggunakan persamaan berikut :
Persamaan untuk mencari gaya reaksi tanah,momen reaksi tanah dan koordinat pusat tekanan
dalam bingkai global menggunakan persamaan dalam bentuk matriks sebagai berikut :
Experiment Study
Experiment Method
Untuk memvalidasi kinerja sistem sensor kita telah membandingkan hasil kuantitatif
dari sistem sensor dengan pengukuran yang diperoleh dengan analisis gerak optik komersial
sistem Hi-DCAM (teknologi citra NAC. Jepang). Sistem analisis gerak komersial dapat
melacak dan mengukur lintasan tiga dimensi (3-D) penanda retro-reflektif ditempatkan pada
tubuh subjek. Kamera dengan frekuensi sampling 100 Hz digunakan untuk melacak posisi
penanda dengan akurasi sekitar 1 mm. Sebuah plat gaya stasioner EFP-S-2KNSA12 (Kyowa
co. Jepang) juga digunakan sebagai sensor referensi untuk memvalidasi pengukuran sensor
gaya yang dikembangkan. Dalam percobaan, sistem sensor simultan bekerja di pengukuran
gaya manusia dan gerak. Data dari sistem sensor referensi dan sistem sensor referensi yang
kami kembangkan diuji cobakan pada saat yang sama, dan dibandingkan
Akar rata-rata perbedaan square (RMS) digunakan untuk membandingkan kedekatan pada
amplitudo dari dua hasil pengukuran sensor. Persen error (PE) dihitung sebagai rasio antara
kesalahan RMS dengan rata-rata puncak-ke puncak amplitudo referensi pengukuran.Berikut
adalah persamaan akar rata-rata (RMS) antara dua hasil pengukuran sensor.
F disini adalah gaya yang diukur,sedangkan Fr adalah sebagai referensi,sebagai pembanding yang nanti akan dimasukkan ke dalam persen error.
Experiment Results : GRF and Segmental Orientations
Gambar. 13. Triaksial GRF diukur dengan sistem wearable sensor (garis utuh) dan
plat gaya (garis putus-putus). (a) Komponen vertikal: Fz. (b) komponen horizontal: Fy. (c)
Komponen horizontal: Fx. (d) Jumlah GRF. (e) Kesalahan dari GRF antara dua sistem
pengukuran.
Gambar. 14. Pusat tekanan (CoP) yang diukur dengan sistem wearable sensor (garis
utuh) dan plat gaya stasioner (garis putus-putus) dalam sistem koordinat global.
Gambar. 15. Perpindahan sudut segmental diukur dengan sistem wearable motion
sensor (garis utuh) dan sistem kamera Hi-DCAM (garis putus-putus). (a) perpindahan sudut
kaki. (b) perpindahan sudut betis. (c) sudut perpindahan paha
Gambar 13
Gambar 14
Gambar 15
Experiment Results : Joint Moments
Hasil perbandingan momen gabungan dari pergelangan kaki, lutut dan pinggul di
bidang sagittal antara dua sistem pengukuran ditunjukkan pada Gambar. 16. RMS perbedaan
saat sendi pergelangan kaki dihitung dengan menggunakan dua sistem adalah 2 ± 0.34nm,
menjadi 5,4 ± 0,7% dari besarnya momen maksimal sendi pergelangan kaki selama siklus
pergerakan utuh. Perbedaan RMS momen sendi lutut dihitung dengan menggunakan dua
sistem adalah 7.2 ± 1.34Nm, menjadi 6 ± 0,32% dari besarnya momen maksimal sendi lutut.
Perbedaan RMS pinggul saat bersama dihitung dengan menggunakan dua sistem adalah 11,2
± 1.3Nm, menjadi 6,1 ± 0,25% dari besarnya momen maksimal sendi pinggul.
Gambar. 16. Momen sendi yang diestimasi oleh sistem wearable sensor (garis utuh),
dan plat gaya & sistem kamera Hi-DCAM (garis putus-putus), plantarflexor pergelangan
kaki, ekstensor lutut, dan fleksor pinggul positif, dan pergelangan kaki dorsofleksi, fleksor
lutut, dan ekstensor pinggul negatif. (a) momen sendi pergelangan kaki. (b) momen sendi
lutut. (c) momen sendi panggul.
Gambar 16
Kesimpulan
1. Sebuah sistem wearable sensor dikembangkan untuk mengukur gaya reaksi tanah tri-
directional (GRF) dan segmen orientasi.
2. Sistem wearable sensor diusulkan dalam bab ini dapat diterapkan untuk uji coba
berjalan berurutan di sejumlah non-laboratorium lingkungan, karena biaya yang lebih
rendah, ukuran yang kecil dan efek lebih rendah pada gerakan manusia.
3. hasil perbedaan RMS menunjukkan bahwa pengukuran gaya dan gerak yang
dihasilkan serta hasil estimasi momen sendi memiliki konsistensi yang tinggi antara
kedua sistem (wearable sensor & pelat gaya- sistem kamera optik)
Related Documents











