Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam Future Visions 17 - 20 August 2015, Amsterdam, The Netherlands Analogue and digital form-finding of bending rod structures Ioanna SYMEONIDOU* *Institute of Architecture and Media Technische Universität Graz, Inffeldgasse 10/2 8010 Graz, Austria [email protected] Abstract This paper presents a research on real-time shape exploration employing analogue and digital form- finding of bending structures, which concluded with the testing of the proposed design process during an intensive student workshop at Graz University of Technology. The aim was to experiment with analogue and digital tools in parallel, informing design decisions. The experiments involved physical form-finding following the tradition of Frei Otto at the Institute of Lightweight Structures in Stuttgart as well as computational form-finding simulating bending behavior with the use of dynamic relaxation of spring-particle systems (Kangaroo plugin for Rhino). By establishing feedback between digital media and physical prototypes, the creative process was informed by the material characteristics and structural properties; the aim was to utilize a parametric model not merely as a representational tool, but as a tool for real-time shape exploration that embeds the physical behavior and interaction among bending rods. While traditional architecture and engineering aims at the structural optimization of an existing form, a dynamic form-finding system can lead to a real-time discovery of structural form encouraging the morphogenesis of optimized structures. Keywords: form-finding, analogue-digital, parametric design, bending structures, Kangaroo physics simulation, design education 1. Introduction Form-finding is a well-established method in architecture and engineering aiming to define the optimal geometry with respect to the structural behavior for certain boundary conditions. There is a long history of experimentation in this field, supported by scientific research and built examples. Frei Otto was the pioneer to research, study and categorize these structures, together with his team at the Institute for Lightweight Structures in Stuttgart. Their physical experiments and models have been documented in the famous volumes of IL books; although most of the IL series were published in the early 70s, which is much before the wide use of computational design in architecture, they remain an

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Proceedings of the International Association for Shell and Spatial Structures (IASS)
Symposium 2015, Amsterdam
Future Visions
17 - 20 August 2015, Amsterdam, The Netherlands
Analogue and digital form-finding of bending rod
structures
Ioanna SYMEONIDOU*
*Institute of Architecture and Media
Technische Universität Graz, Inffeldgasse 10/2 8010 Graz, Austria
Abstract
This paper presents a research on real-time shape exploration employing analogue and digital form-
finding of bending structures, which concluded with the testing of the proposed design process during
an intensive student workshop at Graz University of Technology. The aim was to experiment with
analogue and digital tools in parallel, informing design decisions. The experiments involved physical
form-finding following the tradition of Frei Otto at the Institute of Lightweight Structures in Stuttgart
as well as computational form-finding simulating bending behavior with the use of dynamic relaxation
of spring-particle systems (Kangaroo plugin for Rhino). By establishing feedback between digital
media and physical prototypes, the creative process was informed by the material characteristics and
structural properties; the aim was to utilize a parametric model not merely as a representational tool,
but as a tool for real-time shape exploration that embeds the physical behavior and interaction among
bending rods. While traditional architecture and engineering aims at the structural optimization of an
existing form, a dynamic form-finding system can lead to a real-time discovery of structural form
encouraging the morphogenesis of optimized structures.
Keywords: form-finding, analogue-digital, parametric design, bending structures, Kangaroo physics
simulation, design education
1. Introduction
Form-finding is a well-established method in architecture and engineering aiming to define the
optimal geometry with respect to the structural behavior for certain boundary conditions. There is a
long history of experimentation in this field, supported by scientific research and built examples. Frei
Otto was the pioneer to research, study and categorize these structures, together with his team at the
Institute for Lightweight Structures in Stuttgart. Their physical experiments and models have been
documented in the famous volumes of IL books; although most of the IL series were published in the
early 70s, which is much before the wide use of computational design in architecture, they remain an

Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
essential reading for computational designers of our times. As Nerdinger explains The form-finding
processes are those which, given a specified set of conditions and following the prevailing laws of
nature, give rise to visible forms and constructions under experimental conditions. As they take place
without human intervention, they are also termed autonomous formation processes” (Nerdinger [1]).
The work presented in this paper summarizes the research and design approach that was adopted
during an experimental design workshop which took place at Graz University of Technology in
November 2014. The workshop explored analogue and digital form-finding of bending rod structures.
The students’ work employed both analogue and digital tools, and aimed to inform the design process
through the knowledge gained at the intersection of the two media. The methodology was based on
lightweight structures research and form-finding of bending structures as it was studied by Frei Otto
and his team at ILEK, and documented in the book IL 31: Bamboo as a building material (Dunkelberg
[2]). Frei Otto refers to such constructions with the generic term “Curved Compression Rods”
referring to arches, grid shells and other structures “whose form is determined by installing curved –
and thus prestressed rods”.
2. Bending as a design tool
Though there is an extensive body of research in membrane structures and a plethora of student work
relating to tensile structures, bending has gained less attention within the academic community. The
aim of the workshop was to utilize bending behavior as a design tool for formal experimentation. A
system of bending rods, just as any other form-found structure tries to minimize its energy to span
between the given borders. Eventually, the material system settles in a stable configuration. Thus a
bending rod configuration is able to ‘compute’ form. De Landa describes it as an ‘analog search
algorithm’. Such design process embeds performance criteria leading to optimized configurations. A
physics engine, like Kangaroo, acts as a design decision support system, it assists architects to
increase their intuitive understanding of the structural behavior of geometrically complex forms. ‘The
environment educates the user as to the effects of forces on the form of structures and provides an
interactive form-finding’ (Kilian and Ochsendorf [3]).
During the first stage of the workshop the students undertook research on existing structures that
employ elastic bending and studied numerous examples of bending structures documented in the
bibliography. These would range from vernacular architecture, huts and bridges (Dunkelberg [2]) to
contemporary constructions like the Multihalle Manheim by Frei Otto (Nerdinger [1]) and the
Research Pavilions at the Institute for Computational Design in Stuttgard (Fleischmann and Menges
[4]) (Fleischmann and Menges[5]) (Krieg et al. [6]). Bending-active construction systems are widely
used for temporary or mobile shelters. Leinhart et al. [7] in their paper about active bending provide a
comprehensive list of constructions from primitive housing to contemporary pavilions.
Though form-finding is an intuitive process and experimentation with analogue media leads to tacit
knowledge and experience with the material, there is a considerable knowledge gap in the
mathematical and computational understanging of the geometry of bending. Architect Marten
Nettelbladt has been experimenting with the geometry of bending and has created an important online
resource of experiments and observations concluding that all ‘elastic deformations’ follow the same
principals and therefore the same geometry (Nettelbladt [8]). Recent developments in Kangaroo
physics engine for interactive simulation, optimisation and form-finding within Grasshopper
(Parametric plugin for McNeel Rhinoceros), developed by Daniel Piker [9] can provide a very good

Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
approximation of bending geometry, and for this reason this tool was selected for the afoermentioned
workshop. This engine works in an iterative way calculating the interaction among predefined forces
like springs, bending resistance, pressure and gravity, and their repercussion on the geometry, until a
stable form is reached. Comparing the results obtained from the simulation to the physical models,
there is a very precise representation when simulating a single bending rod or a small set-up of
interacting rods. The digital experiments become more demanding when several interacting rods are in
play, adding to the complexity of the system. At the same time the physical form-finding experiments
revealed some unpredictable results that emerged from the self-organizational capacity of the system
to regulate and distribute forces to reach equilibrium.
In their paper, Active Bending, A Review on Structures where Bending is used as a Self-Formation
Process, the authors explain the differentiation of bending- active structures based on their design
approaches. They show three possible approaches: the behavior based approach, the geometry based
approach and the research that seeks to integrate the two. (Lienhard et al. [7]). In a behavior based
approach bending is studied intuitively; there is an empirical understanding of the geometry and
structural behavior. This involves several material tests, to test the limitations and the physical
properties. In a geometry based approach, the geometry is defined a priori through analytical methods
aiming to approximate the geometry of bending. There is an analysis of material limitations which are
calculated based on the curvature obtained through bending. In the integral approach there is a
combination of the above, the deformation due to elastic bending is studied through numerical form-
finding, aiming to an increased control of the geometry based on material behavior. The limitations
and the material properties are embedded in the analysis model. Lienhard et al. suggest that a
historical overview of built examples, would group the design approaches according to the analysis
tools available, reaching from empiric to analytical and finally, modern numerical analysis.
Nevertheless, despite the fact that is currently relatively easy to simulate complex bending behavior
through numerical analysis, the value of analogue form-finding experiments is still significant. The
computational tools are not introduced to completely substitute analogue form-finding methods, but to
complement them and enrich the design research. The two media cross-inform each other and aid
architects to take informed design decision. During the workshop it was seen that analogue media
proved more efficient with the gathering of qualitative characteristics and permitting design freedom,
while computational tools proved more efficient in the handling of big amounts of data and generally
quantitative characteristics. Therefore the aim of the workshop was to combine tools and
methodologies rather than referring to them as competing strategies for form exploration.
2.1. The set-up for analogue experiments
The analogue experiments were undertaken with stainless steel rods of 0.8 and 1 mm diameter as they
perform well in elastic bending and only in extreme bending configurations develop plastic
deformations. The physical models and material tests were documented and a first set of observations
provided a starting point for the study of the behavior of the structures. The models obtained from this
experimental stage were too complex to explain in simple mathematical rules, however it was obvious
that there are some internal physical rules that govern the obtained formations. Although the set-up
was relatively simple, the form-found structures in several cases were highly complex.
Having a very restricted variety of materials, that is stainless steel rods of certain length and diameter,
the design decisions mainly related to simple actions, such as, constraining the length of certain rods,

Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
imposing a predefined start tangent, forcing two rods to touch through a movable or fixed link, forcing
two rods to obtain the same tangent, bundling of rods and interlacing. No matter how simple the above
operations may sound, the combination of several of them within the same system can be a really
challenging task.
The aim of this set of form-finding experiments was to come up with a structure that is aesthetically
pleasing and structurally stable, so that it can be further developed into an architectural artefact. The
design brief was relatively free, ranging from small pavilions to shading devices and canopy schemes,
thus permitting flexibility, creativity and formal experimentation. This was an exploratory phase,
where physical models were used instead of sketches to highlight and communicate the design intent.
Though it is straightforward to predict the behavior of the elements individually, their collective
behavior displays a substantial level of unpredictability as the system self-organizes for the given
forces and set-up.
As Achim Menges explains in his paper Behavior-based Computational Design Methodologies “the
design space is defined and constrained by material behavior, fabrication and production. This
understanding of design computation as a calibration between the virtual processes of generating form
and the physical becoming of material systems, should not be conceived as limiting the designer, but
rather as enabling the exploration of unknown points in the search space defined by the material itself”
(Menges [10])
The experimentation with stainless steel rods aimed primarily to highlight a morphological vocabulary
to be used in the workshop and derive performative geometric configurations. For scaling up the
system, to involve more parameters such as detailing, assembly and basic structural behavior, the
obvious choice would be to work with glass fiber rods or carbon fiber rods, in a medium scale set-up.
Full scale experiments with Glass Reinforced Polymer (GRP) rods have been undertaken by several
researchers, and documented in papers and work-in-progress reports (Symeonidou and Gupta [11],
Bessai [12]). Glass Reinforced Fiber is an anisotropic material with high Young modulus. When
casted in form of a rod, the fibers are aligned along the length giving the material high elastic strength
with flexibility to bend. It also attains a high elastic limit thus allowing to conduct experiments in
cases that stainless steel rods would get a permanent deformation (Symeonidou and Gupta [13]).
Figure 1: Loading tests of a single GRP element 9 mm with two fixed connections inducing a vertical
start tangent at both ends.

Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
In most of the experiments, torsional buckling and twist are present, but the circular cross section of
the rods does not indicate the amount of twist present in the structure. The form-finding of twisted
interlaced structures is further studied by EPFL group of Nabaei, Baverel and Weinand [14].
Departing from a rod approach, they further develop their simulation of linear panels of non-
equilateral cross section in order to control and visualize the twists and resolve intersections in case of
panels colliding while interlaced. According to the authors, interlacing adds to the structural resistance
of an object increasing its load bearing capacity. “Bending and twisting forces influence how the
interlaced relaxed geometry would look like. The fundamental interest of reproducing a pattern with
components resistant in bending and torsion (unlike tensile-only ones) is that the assembly will relax
into an actively curved geometry which can span over an architectural ambiance. This implies that the
geometry for an actively curved interlace of components with bending and torsional resistance has to
be form-found” (Nabaei et al. [14]).
Figure 2: Analogue form-finding model of stainless steel rods for a canopy scheme. There is tangency
constraint in the start and end of the bending rods as well as connection of rods in the middle of the
construction, with rods forced to self-organize obtaining a common tangency locally on the
connection point © Institute of Architecture and Media, TU Graz
Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
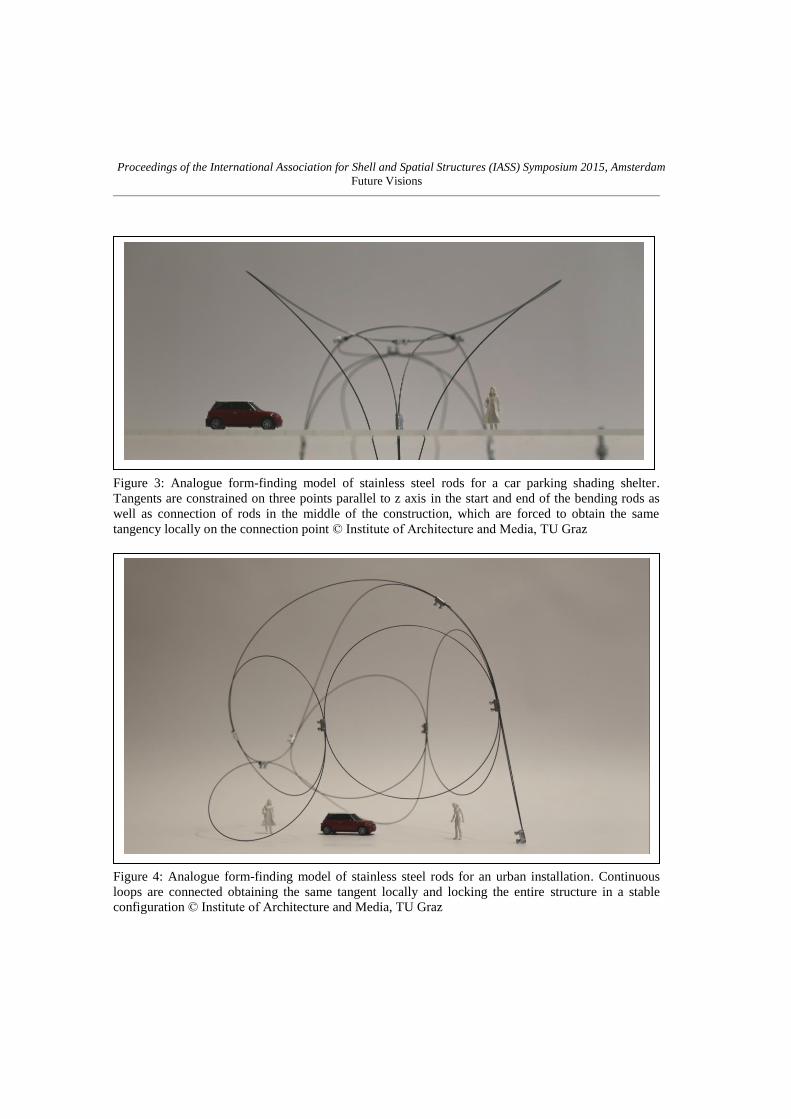
Figure 3: Analogue form-finding model of stainless steel rods for a car parking shading shelter.
Tangents are constrained on three points parallel to z axis in the start and end of the bending rods as
well as connection of rods in the middle of the construction, which are forced to obtain the same
tangency locally on the connection point © Institute of Architecture and Media, TU Graz
Figure 4: Analogue form-finding model of stainless steel rods for an urban installation. Continuous
loops are connected obtaining the same tangent locally and locking the entire structure in a stable
configuration © Institute of Architecture and Media, TU Graz

Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
2.2. The computational simulation of bending
In an attempt to computationally simulate bending behavior, as Achim Menges explains “there are no
simple mathematical equations which can describe the entirety of a surface defined by the equilibrium
of applied force – be it tensile, compressive, or pressurized” (Menges [10]).
Axel Kilian presented a computational methodology for form-finding as part of his research for the
development of CADenary software. Kilian’s methodology was based on spring-particle systems
which lies in the core of most simulations of that sort. As Kilian and Ochsendorf explain in their
paper, “particle-spring systems have been used extensively in cloth simulations and other graphics
problems, particularly for making realistic simulations for the animation of clothing and other
fabrics”(Kilian and Ochsendorf [3]). The idea behind the system is an algorithm that iteratively
computes forces, velocity and lengths of springs that behave according to Hooke’s Law.
Particle-spring systems are based on lumped masses (particles) which are connected by linear elastic
springs. Each spring is assigned a constant axial stiffness, a rest length, and a damping coefficient.
Springs generate a force when displaced from their rest length. External forces can be applied to the
particles, as in the case of gravitational acceleration. Each particle in the system has a position, a
velocity, and a variable mass, as well as a summarized vector for all the forces acting on it. A force in
the particle-spring system can be applied to a particle based on the force vector‘s direction and
magnitude (Symeonidou [15]). The simulation takes place according to the parameters set by the
designer, and the system eventually reaches equilibrium. The above process, known as dynamic
relaxation was introduced in the 1960s by Alistair Day [16] and is “a computation modeling, which
can be used for the form-finding of cable and fabric structures. The dynamic relaxation method is
based on a discretized continuum in which the mass is assumed to be lumped at given nodes. The
system oscillates about the equilibrium position under the influence of loads. The iterative process is
achieved by simulating a pseudo-dynamic process in time” (Lewis [17]).
Having acquired some intuitive understanding of bending behavior through the analogue experiments,
the students of the workshop experimented with computational approaches using Kangaroo plugin for
Rhino and Grasshopper. Kangaroo is a physics engine developed by Daniel Piker, comprising of a
collection of algorithms that computationally simulate some aspects of real-world physical behavior of
materials and objects. As Piker explains “one great advantage of physically based methods is that we
have a natural feel for them, and this intuitive quality lends itself well to the design process” (Piker
[9]). The biggest benefit of form-finding in Kangaroo, is that the designer can embed rapid simulation
in early design stages, without the need to script a dynamic relaxation routine and therefore he can
drive the design towards informed and optimized solutions. In Piker’s words, “through the application
of real-world physics we can make computational tools that really work with us to design in a way
that is both creative and practical”.
During the workshop the students used the newly incorporated hinge components, which means that
apart from the standard spring-particle parameters like rest length, spring force, damping, they would
define a rest angle for the hinges to be computed during dynamic relaxation. For the case of elastically
bending rods, the initial geometry is represented by a curve which is divided into a finite number of
line segments which will be introduced as springs with a fixed length and high spring stiffness (for
avoiding changes in the total length of the rod). The rest angle (the angle between the tangents of two
consecutive line segments) is set to 0, so that the natural tendency of the rod is to spring back to its
initial straight condition. As the overall length of a rod is not negotiated during the simulation, it is
Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
important to set the start and end conditions of the rod. The designer would decide the degrees of
freedom at the two ends of the rod, in the case of pinned connection, the end point of the spring would
be anchored to fixed xyz coordinates, whereas for simulating a fixed connection we would require to
define a start tangent. This would geometrically mean to set the first two control points of a degree 2
curve in the desired direction, or in the case of spring-particle systems with hinges, to set the position
of the first two particles as fixed for the desired tangent direction.
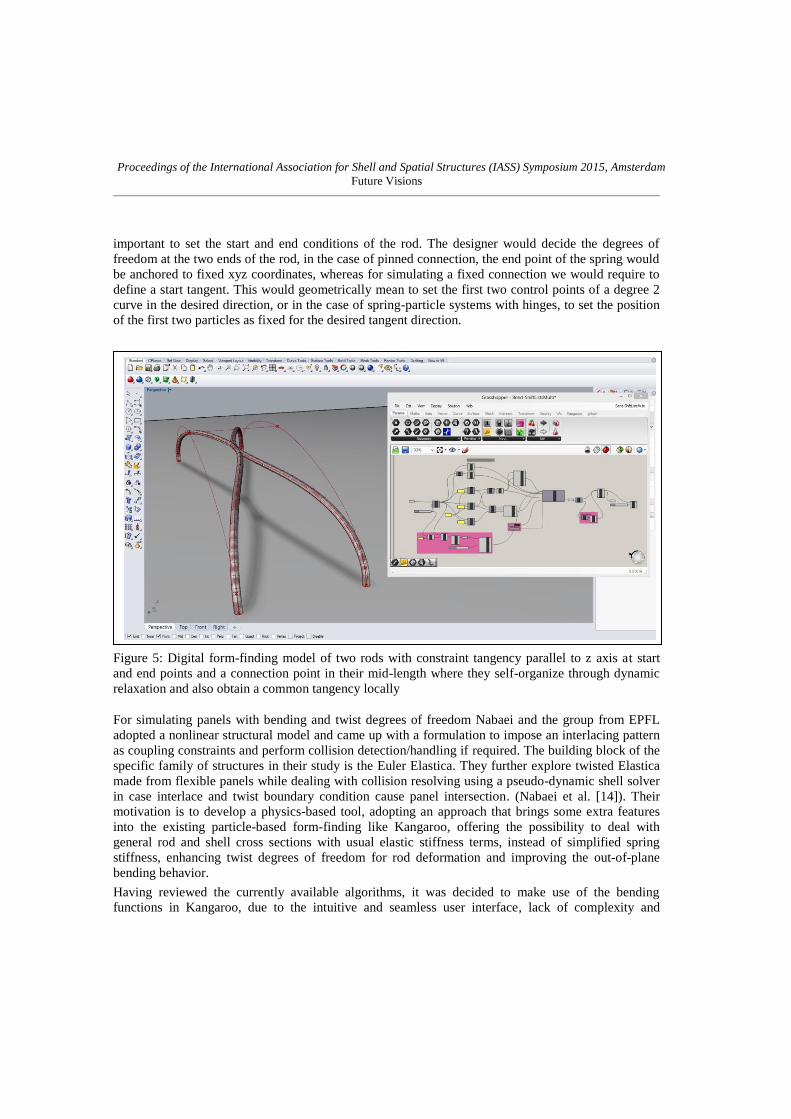
Figure 5: Digital form-finding model of two rods with constraint tangency parallel to z axis at start
and end points and a connection point in their mid-length where they self-organize through dynamic
relaxation and also obtain a common tangency locally
For simulating panels with bending and twist degrees of freedom Nabaei and the group from EPFL
adopted a nonlinear structural model and came up with a formulation to impose an interlacing pattern
as coupling constraints and perform collision detection/handling if required. The building block of the
specific family of structures in their study is the Euler Elastica. They further explore twisted Elastica
made from flexible panels while dealing with collision resolving using a pseudo-dynamic shell solver
in case interlace and twist boundary condition cause panel intersection. (Nabaei et al. [14]). Their
motivation is to develop a physics-based tool, adopting an approach that brings some extra features
into the existing particle-based form-finding like Kangaroo, offering the possibility to deal with
general rod and shell cross sections with usual elastic stiffness terms, instead of simplified spring
stiffness, enhancing twist degrees of freedom for rod deformation and improving the out-of-plane
bending behavior.
Having reviewed the currently available algorithms, it was decided to make use of the bending
functions in Kangaroo, due to the intuitive and seamless user interface, lack of complexity and
Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
abundance of online tutorials for our students to refer to. In the case of stainless steel rods of circular
diameter, the simulation was done for linear elements and thickness was applied to the resulting
geometry after equilibrium was found. Therefore we are not considering a realistic approximation of
real-life material elastic stiffness as the EPFL approach explained above, but an interactive tool for
informing initial design ideas.
Figure 6: Typical Grasshopper definition for digital form-finding with Kangaroo physics engine
2.3. Some observations in the intersection between analogue and digital media
The experimentation with physical models was a medium that embeds information on stiffness and the
amount of force that needs to be applied in order to achieve the desired bending geometry. As the
students were setting up the models literally “with their hands”, they subconsciously obtained the tacit
knowledge about material behavior and the way forces translate into geometry. The sequence of
assembly is also a crucial mater, especially when bundling or interlacing of rods takes place. Some of
the rods are stabilized when a new rod enters the configuration to lock the moveable parts in place.
The computational model on the other hand does not include the notion of assembly. The set-up of
rods is created as a diagram of relationships among rods, it is important to define what is connected to
what and which constraints are present in the system. When dynamic relaxation takes place, the
system oscillates around the equilibrium position until it finds a stable configuration. There are cases
where the obtained configuration looks “wrong” from an intuitive point of view, especially when a
physical experiment of similar constraints gives a different result. In such cases, sometimes it is
enough to impose artificially some movement to the system, in order to re-calculate all forces in play
and finally settle in a new stable position. Although assembly sequence cannot be simulated in the
given computational set-up, it was clearly seen in the computational experiments, that when

Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
simulating bending behavior, errors can occur when the user imposes the movement of the parts too
fast for the algorithm to re-calculate the forces and positions of the underlying spring-particle system.
Self-intersection of bending rods can also occur in the digital model, unless the designer imposes
certain collision constraint. The design of structures that implement elastic bending has always been
studied in an empirical experimental framework, from which it is understood that “in order to achieve
predictive design capability for force-active systems in real world situations, complementary physical
and computation models are necessary” (Bessai [12]).
3. Conclusions
Just as Otto’s soap-film experiments which are scaled material simulations utilized to mimic and test
full-scale system behavior, the piano wire experiments attempt to open up the repertoire for active
bending structures, in a series of scaled models that are indicative of the geometric behavior. This is
not to be seen as an in-depth study, because several structural parameters are omitted for the sake of
simplicity. The above approach is to be seen as a brainstorming tool for architects and does not require
specialized knowledge and advanced technical skills. However, the design process itself embeds
certain level of intelligence and optimization, which would not be achieved without analogue or
digital form-finding. From an educator’s point of view, the idea of actively engaging in a hands-on
exploratory process, both with analogue and digital media is extremely enriching for students for a
variety of reasons relating to perception, cognitive psychology and learning theories. In the majority
of his writings, MIT’s computer scientist, and educator Seymour Papert focuses on propagating the
idea of learning by actively constructing knowledge through the process of making and sharing both
the artefact and the knowledge (Papert [18], [19]). During the last decades there is a growing
acceptance of learning-by-making, it is broadly recognized that knowledge is a consequence of
experience and that the role of technology is significant in the construction of knowledge (Stager
[20]).
With relation to bending behaviour in particular, as Lienhard et al. explain, constant developments of
simulation tools and projects that exhibit active bending in various typological expressions, have by
no means exhausted their field of application. “There is a growing international number of scientists
committing themselves to research and development of design, material and simulation questions
related to bending-active structures” (Lienhard et al. [7]). The aim of this paper was to present an
overview of the techniques and methodologies investigated during “Bend the rules” workshop that
took place in November 2014 at the Institute of Architecture and Media at Graz University of
Technology. It addresses issues of design research through praxis, and design processes that
encourage creative design thinking towards an integral approach in architecture, which integrates
material behavior, functionality, material economy, aesthetics and optimized structural performance.
Acknowledgements
The author would like to acknowledge the contribution of Graz University of Technology students:
Brigitte Melek, Cordula Meiler, Csilla Huss, Daniel Plazza, Eva-Maria Merkl, El Basan Morina, Eleni
Chatzatoglou, Filip Luka Pejic, Luka Janko Janezic, Katrin Schegula, Kristina Schröder, Lukas
Andreas Zitterer, Markus Lammert, Matthias Assinger, Hoda Memaran, Stefan Neumann, Paul
Dominik Höber, Paul Christoph Lindheim, Sabrina Patricia Kullmaier, Sebastian Rapposch, Thomas
Kulmhofer and Mana Varzideh.
Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
Special thanks goes to all colleagues and student assistants at the Institute of Architecture and Media
for their continuous help and support. The results of the workshop are also documented in the
following web link: https://iam.tugraz.at/workshop14w/
References
[1] W. Nerdinger, Frei Otto. Complete Works, 1st ed. 2005. 2nd printing edition. Basel ; Boston:
Birkhäuser Architecture, 2005.
[2] K. Dunkelberg, IL 31, Bambus. IL 31, Bamboo. Bambus als Baustoff. Bauen mit pflanzlichen
Stäben. Stuttgart: Krämer, Stuttgart, 2000.
[3] A. Kilian and J. Ochsendorf, “Particle-spring systems for structural form finding,” J.-Int. Assoc.
Shell Spat. Struct., vol. 148, p. 77, 2005.
[4] M. Fleischmann and A. Menges, “Physics-Based Modeling as an alternative approach to
geometrical constrain-modeling for the design of elastically-deformable material systems,” in
Digital Physicality-Proceedings of the 30th eCAADe Conference, 2012, vol. 1, pp. 565–575.
[5] M. Fleischmann and A. Menges, “ICD/ITKE Research Pavilion: A Case Study of Multi-
disciplinary Collaborative Computational Design,” in Computational Design Modelling, C.
Gengnagel, A. Kilian, N. Palz, and F. Scheurer, Eds. Springer Berlin Heidelberg, 2011, pp. 239–
248.
[6] O. Krieg, K. Dierichs, S. Reichert, T. Schwinn, and A. Menges, “Performative Architectural
Morphology: Robotically manufactured biomimetic finger-joined plate structures,” in
RESPECTING FRAGILE PLACES [29th eCAADe Conference Proceedings / ISBN 978-9-
4912070-1-3], University of Ljubljana, Faculty of Architecture (Slovenia) 21-24 September 2011,
pp.573-580, 2011.
[7] J. Lienhard, H. Alpermann, C. Gengnagel, and J. Knippers, “Active Bending, a Review on
structures where bending is used as a self-formation process,” Int. J. Space Struct., vol. 28, no. 3,
pp. 187–196, 2013.
[8] M. Nettelbladt, The Geometry of Bending. Stockholm, Sweden: Förlag Mårten Nettelbladt, 2013.
[9] D. Piker, “Kangaroo: Form Finding with Computational Physics,” Archit. Des., vol. 83, no. 2, pp.
136–137, Mar. 2013.
[10] A. Menges, “Behavior-based Computational Design Methodologies,” in Proceedings of the 31st
Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA),
Banff, Alberta, 2011.
[11] I. Symeonidou and U. Gupta, Bending Curvature: Design Research and Experimentation:
Analogue and digital experiments. LAP LAMBERT Academic Publishing, 2012.
[12] T. Bessai, “Bendıng-actıve bundled structures: Prelımınary research and taxonomy towards an
ultra-lıght weıght archıtecture of dıfferentıated components,” in Proceedings of the 33rd Annual
Conference of the Association for Computer Aided Design in Architecture (ACADIA),
Cambridge, 2013.
[13] I. Symeonidou and U. Gupta, “Bending Curvature, A design tool for interactive complexity,” in
Proceedings of the 17th International Conference on Computer-Aided Architectural Design
Research in Asia, 2012.
[14] S. Nabaei, O. Baverel, and Y. Weinand, “Form finding of twisted interlaced structures: a hybrid
approach,” in Advances in Architectural Geometry 2014, Springer, 2015, pp. 127–143.

Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam
Future Visions
[15] I. Symeonidou, “Surface Nets: Digital - Material behaviour of a Hybrid Structure,” presented at
the European Association for Architectural Education (EAAE-AEEA) Subnetwork on
Architectural Theory, Chania, Greece, 2010.
[16] A. S. Day, “An introduction to dynamic relaxation,” The Engineer, vol. 219, no. 5688, pp. 218–
221, 1965.
[17] W. J. Lewis, Tension Structures: Form and Behaviour. Thomas Telford, 2003.
[18] S. Papert, The Children’s Machine: Rethinking School In The Age Of The Computer, Reprint
edition. New York: Basic Books, 1994.
[19] S. A. Papert, Mindstorms: Children, Computers, And Powerful Ideas, 2 edition. New York: Basic
Books, 1993.
[20] G. Stager, “Progressive Education and The Maker Movement - Symbiosis Or Mutually Assured
Destruction,” presented at the Fab Learn 2014, Stanford University, 2014.
Related Documents











