t326 IEEE TRANSACTIONS ON ACOUSTICS, SPtlhCH. AND SIcNAL PROCLSSINC. VOL. .16. NO. ll. AtrtjtjST l9il8 Restoration Abslrscl-An adaptive smoothing filter is proposed for reducing noise in digilal signals of any dimensionality. The adaptive procedure is based on the selection of an appropriate inner or outer trimmed mean filter according to local measurements of the tail behavior (impulsivity) of the noise process. The set of trimmed means used provides robustness against a wide range of noise possibilities ranging from very shallow tailed to very heavy tailed. A Monte Carlo analysis using a family of generalized exponential distributions supports the choice of the trimmed mean s€lectedfor measured values of an impulsivity statistic. The assumption underlying the definition of the filter is that the signal to be filtered is locally smoothly varying, and that the noise process is uncorrelated and derives from an unknown unimodal symmetric dis- tribution. For image processing applications, a second statistic is used to mark the location of abrupt intensity changes, or edges; in the vi- cinity of an edge, the trend-preserving median filter is used. Since the impulsivity and edge statistics used in defining the adaptive filtcr are both functions of order statistics, the extra computation required for their calculation is minimal. Examples are provided of the filter as ap- plied to images corrupted by a variety of noises. I. InrnooucrroN n RDER statistic(OS) filters are a classof nonlinear tvf digital filters notedfor their robust smoothing prop- erties [1]. Discrete filteringstrategies based on order sta- tistics have remained a topic of increasing interest since the development of the median filter [2], which is a sim- ple type of OS filter of particular use for applications in speech and image processing. Properties of the median filter that havecontributed to its popularity include its in- variance to monotonic changes in signalintensity and its noise smoothing characteristics, particularly if the noise is impulsive [3]. OtherOS filters provide advantages sim- ilar to those of the median filter while offeringnoneof its less desirable effects, such asstreaking, blotching, or false contouring [4]. The median and otherOS filtersare often effective alternatives to linearfilteringapproaches, partic- ularly for applications where there is uncertainty in the noise and signal models,or when there is substantial overlap between the noise spectra andvital portions of the signal spectra (e.g., high-frequency noise in images con- taining edges) [], [5], [6J. A. Order Statistic Fihers The OS filter canbe easily defined on any finite-dimen- sional discrete signal. For an arbitrary n-dimensional se- Manuscript received April 30, 1987; revised Febnrary 8, 1988. The authors arewith the Department of Electrical andComputer Engi- neering, University ofTexas at Austin. Austin, TX 78712-1084. IEEELog Number 8821856. Adaptive TrimmedMeanFiltersfor Image ALFREDO RESTREPO, STUDENT MEMBER, IEEE,AND ALAN CONRAD BOVIK, MEMtsI]R, IEI]E quence {x;}, where j : ( jt,-/r, ' . . j^)'eZ', define thesequence of length M vectors { r; }, where each vector ri is composed of M elements of {x1} spanned by an n- dimensional window 14,of fixed and finite extent: -rj = lxt: j e W1l. The window Wi can be defined to be of arbitrary sizeor shape. and need not be connected; how- ever, for signalfiltering purposes, I{z; usuallyspans an odd number of connected signal samples (hence, assume M : 2N * I for some integer N > I ), and is symmetric with respective to the coordinate axes. In defining the OS filter, the spatial or temporal distribution of the elements of x; within the window W7is not of interest. Instead, define the vector of ordered samples (or order statistics) x(j) = order [x;l : (-r'rr t,j, xr2l:j, ' '' ,.ttMt:j)'. such that-rqt\tj=x7):j < "' largest sample contained in x;. Given a length-M v-ector of real-valuedcoefficientsa = (a1, a?,... ,ay)I,the output of the r-dimensional OS filter with coefficients a it {yi(o)}, where.r';(a) = arx,jt foreach j eZ'.For signalsmoothing or restoration purposes, it is generally required thata'l = 1, where I = (1, l, .. , l)', so thatthe filter y, ( a ) will pass constant signal regions with- out alteration []. OS filtersof this type may be referred to as smoothing OS flters, which are the only OS filters for which theoretical results and concreteapplications have beendeveloped. The class of smoothing OS filters includes many filters in practical use. These include the edge-preserving me- dianfilter(d,v+r : l. a,: O; i + N + l), the slightly moregeneral kth rank-orderfilters (ar : l, a1 = 0; i * k) [7], theaveraging filter (c, : 1 /M Y i ). whichis the only linear smoothing OS filter, and trimmed mean filters [8]. whicharedefined later.Smoothing OS filterscan be viewed as local estimators of various noise parameters if the signal samples are regarded as randomlyoccurring, Linearly combined order statistics have long beenrecog- nizedby statisticians for their robust and often optimal properties for estimating population parameters, if the ob- servations derive from a commondistributionand occur independently. In this context, such estimators are re- ferredto asL-estimotols, and OS filters are often referred to as L-filters [6], [9]. For example, the sample median andthe sample midrange (at = au : | /2; ai : 0, i = 2, ' ' '. M - I ) are the maximumlikelihood (ML) esti- mators of the meanfor double-exponential and uniform.j variates, respectively, while the sample average is opti mal in several senses for estimating the mean of a Gauss- : 0096-3518/88i0800-1326501.00 0 1988 rEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

t326 IEEE TRANSACTIONS ON ACOUSTICS, SPt lhCH. AND SIcNAL PROCLSSINC. VOL. .16 . NO. l l . A t r t j t jST l9 i l8
Restoration
Abslrscl-An adaptive smoothing filter is proposed for reducing noisein digilal signals of any dimensionality. The adaptive procedure is basedon the selection of an appropriate inner or outer trimmed mean filteraccording to local measurements of the tail behavior (impulsivity) ofthe noise process. The set of trimmed means used provides robustnessagainst a wide range of noise possibilities ranging from very shallowtailed to very heavy tailed. A Monte Carlo analysis using a family ofgeneralized exponential distributions supports the choice of thetrimmed mean s€lected for measured values of an impulsivity statistic.The assumption underlying the definition of the filter is that the signalto be filtered is locally smoothly varying, and that the noise process isuncorrelated and derives from an unknown unimodal symmetric dis-tribution. For image processing applications, a second statistic is usedto mark the location of abrupt intensity changes, or edges; in the vi-cinity of an edge, the trend-preserving median filter is used. Since theimpulsivity and edge statistics used in defining the adaptive filtcr areboth functions of order statistics, the extra computation required fortheir calculation is minimal. Examples are provided of the filter as ap-plied to images corrupted by a variety of noises.
I. InrnooucrroN
n RDER statistic (OS) filters are a class of nonlineartvf digital filters noted for their robust smoothing prop-erties [1]. Discrete filtering strategies based on order sta-tistics have remained a topic of increasing interest sincethe development of the median filter [2], which is a sim-ple type of OS filter of particular use for applications inspeech and image processing. Properties of the medianfilter that have contributed to its popularity include its in-variance to monotonic changes in signal intensity and itsnoise smoothing characteristics, particularly if the noiseis impulsive [3]. OtherOS filters provide advantages sim-ilar to those of the median filter while offering none of itsless desirable effects, such as streaking, blotching, or falsecontouring [4]. The median and other OS filters are ofteneffective alternatives to linear filtering approaches, partic-ularly for applications where there is uncertainty in thenoise and signal models, or when there is substantialoverlap between the noise spectra and vital portions of thesignal spectra (e.g., high-frequency noise in images con-taining edges) [ ] , [5] , [6J.
A. Order Statistic Fihers
The OS filter can be easily defined on any finite-dimen-sional discrete signal. For an arbitrary n-dimensional se-
Manuscript received April 30, 1987; revised Febnrary 8, 1988.The authors are with the Department of Electrical and Computer Engi-
neering, University ofTexas at Austin. Austin, TX 78712-1084.IEEE Log Number 8821856.
Adaptive Trimmed Mean Filters for Image
ALFREDO RESTREPO, STUDENT MEMBER, IEEE, AND ALAN CONRAD BOVIK, MEMtsI ]R, IEI ]E
quence {x ; } , where j : ( j t , - / r , ' . . j ^ ) 'eZ ' , de f inethe sequence of length M vectors { r; }, where each vectorr i is composed of M elements of {x1} spanned by an n-dimensional window 14, of fixed and finite extent: -rj =
lxt: j e W1l. The window Wi can be defined to be ofarbitrary size or shape. and need not be connected; how-ever, for signal filtering purposes, I{z; usually spans anodd number of connected signal samples (hence, assumeM : 2N * I for some integer N > I ), and is symmetricwith respective to the coordinate axes. In defining the OSfilter, the spatial or temporal distribution of the elementsof x; within the window W7 is not of interest. Instead,define the vector of ordered samples (or order statistics)x ( j ) = o r d e r [ x ; l : ( - r ' r r t , j , x r 2 l : j , ' ' ' , . t t M t : j ) ' . s u c ht h a t - r q t \ t j = x 7 ) : j < " '
largest sample contained in x;. Given a length-M v-ectoro f r e a l - v a l u e d c o e f f i c i e n t s a = ( a 1 , a ? , . . . , a y ) I , t h eoutput of the r-dimensional OS filter with coefficients ai t { y i ( o ) } , w h e r e . r ' ; ( a ) = a r x , j t f o r e a c h j e Z ' . F o rsignal smoothing or restoration purposes, it is generallyrequ i red tha ta ' l = 1 , where I = (1 , l , . . , l ) ' , sothat the filter y, ( a ) will pass constant signal regions with-out alteration []. OS filters of this type may be referredto as smoothing OS flters, which are the only OS filtersfor which theoretical results and concrete applicationshave been developed.
The class of smoothing OS filters includes many filtersin practical use. These include the edge-preserving me-dianf i l ter (d,v+r : l . a, : O; i + N + l ) , the sl ight lymore general kth rank-orderfilters (ar : l, a1 = 0; i *k) [7] , the averaging f i l ter (c, : 1 /M Y i ) . which is theonly linear smoothing OS filter, and trimmed mean filters[8]. which are defined later. Smoothing OS filters can beviewed as local estimators of various noise parameters ifthe signal samples are regarded as randomly occurring,Linearly combined order statistics have long been recog-nized by statisticians for their robust and often optimalproperties for estimating population parameters, if the ob-servations derive from a common distribution and occurindependently. In this context, such estimators are re-ferred to as L-estimotols, and OS filters are often referredto as L-filters [6], [9]. For example, the sample medianand the sample midrange (at = au : | /2; ai : 0, i =2, ' ' '. M - I ) are the maximum likelihood (ML) esti-mators of the mean for double-exponential and uniform.jvariates, respectively, while the sample average is optimal in several senses for estimating the mean of a Gauss- :
0096-3518/88i0800-1326501.00 0 1988 rEEE

,er r
, f
RESTREPO AND I ]OVIK: ADAPTIVE TRIMMET, MEAN FI I -TERS
ian distribution. Other l-estimators maintain suboptimalbut highly robust performance over a broad range of noisedistributions; most notably, the trimmed means offer acompromise between the sample median and the sampleaverage. As cst inrators of the nrean, tr immed mean f i l tersperform well for symmetric distributions ranging from theGaussian to more highly " impulsive" distr ibut ions suchas the double exponent ial .
B. Motivation
Only a limited amount of work has been directed to-ward the analysis and design of OS filters for signal pro-cessing applications. Various deterministic analyses haveallowed the characterization of the output space of medianfilters in one dimension [0], and the relationship betweenOS and nonrecursive linear digital fi lters has been par-tially quantified Il]. Statistical design of OS filters hasbeen likewise limited; expressions have been developedfor the optimal (mean-square) OS filter for recovering anarbitrary constant signal immersed in noise [l], and forrestoring known (nonconstant) waveforms [12] and Mar-kov processes [3]. Other efforts have been directed to-ward characterizing the approximate spectral behavior ofOS filters; the most interesting conclusion deriving fromthis work is that OS filters seem to maintain a smoothingcharacteristic regardless of the choice of the filter coeffi-cient set [4], [5]. Beyond these results, however, littleis understood about the applicability of OS filters for ge-neric signal processing applications; generally, heuristi-cism or nondynamical statistical considerations are pres-ently used to guide the choice of the coefficients of thefilter.
The development of a design methodology for OS fil-ters is not only highly desirable, it is necessary if OS fil-ters are to be regarded as an important alternative to con-ventional filtering techniques. However, the highlynonlinear nature of OS filters makes their analysis andsubsequent design very difficult; e.9., there are no tech-niques yet available for decomposing of a signal into "de-sirable" and "undesirable" components (analogous tofrequency selection in linear filtering theory) which canbe separated in some manner by OS filtering. The onlywork in this direction has been the so-called threshold de-composition interpretation of rank-order filters, where the(quantized) input is decomposed into a set of binary sig-nals using a number of thresholds; the class of filterswhich can be described by threshold decomposition in-cludes filters other than rank-order filters, and are collec-tively referred to as stackfilters [6]. VLSI implementa-tions of stack filters have been offered, and a means fordetermining the optimal (least absolute deviation) stackfilter for restoring a known signal in a known (Markov)noise process has been suggested p7l . However, thethreshold decomposition approach has not been shown toseparate a signal into a set of binary signals whose natureis predictable or particularly physically meaningful.
t i 2 7
C. An Adaptive Approach
The most obvious advantageous property of snroothirrgOS filters is the robust performance attained when minorvariations in the predicted statistics of the noise processoccur. However, i f l i t t le is known of the nature of thesignal and/or noise processes, a given OS f i l ter wi l l notnecessarily yield satisfactory performance. Moreover. anOS filter may have varying levels of performance overdifferent portions of a signal. For example, if a digitalimage containing edges is comrpted by an additive whiteGaussian noise, then an averaging f i l ter wi l l g ive goodresults in regions of smoothly varying intensity, but wi l la lso blur edges. Likewise, a nredian f i l ter wi l l enhancethe image near the edges, but will yield highly inefficientperformance (relative (o the averaging filter) over smoothregions. I f the noise is, e.g., uni formly distr ibuted, nei-ther filter could be expected to perform well. Thus, inchoosing an appropriate OS filter for a given noisesmoothing application, the designer is faced with balanc-ing the goals of signal preservation and noise suppressionin a manner which currently remains largely ad hoc.
In this paper, an adaptive OS filter is presented, termedthe adaptive trimmed mean filter, which can be expectedto provide acceptable noise smoothing performance if twoassumptions are satisfied: i) that the signal to be restoredcontains most of its information in the form of smoothlyvarying regions separated by abrupt transitions in inten-sity (edges), and ii) that the (zero-mean additive or unity-mean multiplicative) noise is not strongly correlated andderives from an (unknown) symmetric unimodal nrst-or-der distribution. Since the filter is OS, it may be definedon a signal of any dimensionality, although the signalcharacteristics assumed here are usually associated withoptical images. The adaptive trimmed mean filter is self-modifying according to local measurements of the inputsignal. At each signal coordinate, the filter output is de-fined as an appropriately (inner or outer) trimmed meanof the windowed data set, according to the measured val-ues of two separate "selector" statistics, Q and V. Thefirst statistic p provides a simple means for detecting thepresence or absence of a sustained transition in signal in-tensity, or edge, while the statistic I/ is a measurement ofthe impulsivity, or tail behavior, of the noise distribution.The use of a statistic to adaptively select a robust esti-mator of location was first suggested by Hogg [8], [19],who suggested the adaptive choice of an appropriatetrimmed mean for estimating population parameters in theabsence of information about the population statistics. Tochoose the appropriate trimmed mean, he proposed anovel measure of the tail behavior (impulsivity) which ismore accurate than the usual sample kurtosis. The ap-proach taken in this paper represents an extensiort ofHogg's adaptive estimation procedure for signal filteringpurposes. The coefficients of the filter are chosen viacomparison of the compound values of p and / to a set
ne
Si S
I ,
)h
n) f
aI
vo
r S
dS
r S
v
) r
: -dn
: -
*iv
s;tr:
fr,ffi'fi,.G
,&I$

1328
of predetermined thresholds; if an edge is deemed to passthrough the window, then the edge-preserving median fil-ter is used. If there is no edge found to pass through thewindow, the statistic Iz is used to determine an appropri-ate trimmed mean as the filter output. The selector statis-tics Q and V do not represent a substantial increase incomputation, as they are both functions of the ordereddata values.
The renrainder of the paper is organized as follows. InSection II, the inner and outer trimmed mean filters usedin the adaptive trimmed mean filter are introduced (theirdefinition differs somewhat frorn that given in, e.g., [8]),and reasons for their use are given. In Section III, theadaptive trimmed mean filter is explicitly defined, whilein Section IV, a Monte Carlo simulation is given to sup-port the choice of the threshold values suggested for thestatistics Q and I/. Finally, in Section V, examples areprovided of the filter applied to images comrpted by avariety of synthetic noises. The paper is concluded in Sec-t ion Vl.
I[. TnrvuEo MseN Frr-rsns
The exact values of the filter coefficients used in theadaptive filter proposed here probably are not crucial,provided that the set of filters used is broad enough tomaintain high efficiency over a wide range of noise pos-sibilities. We have chosen to use inner and outer trimmedmean filters for several reasons: they are a parametrizedfamily of filters with simple definitions, their statistical
- properties are understood and well documented in the sta-tistics literature, they have good robustness properties,and they are currently being used in practical signal pro-cessing applications. The Monte Carlo studies used in de-termining the parameters of the particular adaptivetrimmed mean filter proposed here are based on a few spe-cific trimmed mean filters; however, procedures similarto those outlined here could be used to define an adaptivefilter util izing a larger number of trimmed means, or usinganother class of basic filters altogether, e.g., for nonsym-metr ic noises contaminants.
A. DeJinitions
We will discriminate between two different types oftrimrned mean OS filters. The first is the a-inner meanf i l te ry l (a ) : m i (a ) , wh ich has oS f i l te rcoe{ i i c ien ts ( l< i < M )
l , v - t i l < ' , ( l t t a - t ) / 2 )
l ru+t-11: l (u"- t ) /z)
otherwise.
f l
( l )
where [ . r_] is the greatcst in teger conta ined in x ; thus,
IEEF- TRANSACTIONS ON ACOUSTICS, SPEECH. AND SIGNAL PROCESSING, VOL. 36 , NO. 8 , AUGUST I98 I i
the filter output is defined as the average of the centralMq ordered samples. viz., the average taken after the( I - o ) M extreme samples have been "trimmed" away.Hence, i f l (Mu - 1) /2 J = (Md - l ) /2, the OS f i l termla) has the same coefficients as a simple averaging fil-ter of span Mc; otherwise, fractional items are includedat either end. The definition in (l) is somewhat differentthan that usually given for trimmed mean filters; in (l).the parameter q is used to indicate the percentage of thesample used in computing the output, whereas the cY-trimmed mean is defined by indicating the percentage ofthe sample which is trimmed away. It is convenient to usethe definition in (l) for signal smoothing purposes; holv-ever, it is useful to note that an a-inner mean is the sameas a [( | - a)/2]-trimmed mean. The a-inner mean fil-ters are strictly defined only for a e [ /M,l]; for a e[0, | /M ), the default def ini t ion mi(a) = mi( l /Ul isused; thus, the averaging filter, mi(l), and the medianfilter, mi ( | / M ), bound the class of a-inner mean filters.Fornonextremevaluesof o(1 /M < a < 1), the e- innermean filter offers performance somewhere between that ofthe averaging and median filters both as a signal smoother[8], [9] and as an estimator of noise location [23]. It hasbeen pointed out Il] that inner mean filters (applied toone-dimensional signals) cannot be expected to preserveedges any better than nonrecursive linear filters definedwith the same coefficients in the absence of noise, counterto the often-ascribed notion that OS filters are "edge-pre-serving" filters.
The second type of trimmed mean filter considered isthe a-outer mean flter 11@) = mj(a), which has OSfi l tercoeff ic ients (1 . i - M)
/t l|
- : ^ / + I - l M a / 2 1 s l N + l - i l = N
\u" ' "I) ua / z - lMa /21
u r l \' ) M a
t
I lN+r - i l= rv- lMa/21I\ 0; otherwise,\ ( 21
viz., the average of the extreme (largest and smallest) Mcrordered samples. The a-outer mean fi l ters as given in (2)are strictly defined only for a e [0. | - | /M ]; however,by making the simple adjustment e1 : IMaz lMa /z ) l fMu f o r lN + I - i l : w - lMu /2 )whenever cv e ( I - | /M, l l , the f i l ter may be def inedover the in terval a e [0, I I . The c lass of a-outer meanfilters is subsequently bounded by the midrange fi l ter,nr l (0) , and the averaging f i l termi( l ) : mi ( I ) . The a-outer mean fi l ters may be related to the inner mean fi l tersv i a m j ( a ) : [ m 1 ( l ) - ( l - a ) m i ( l - r y ) l f a . l n p a r -t i c u l a r , i t i s u s e f u l t o n o t e t h a t m j ( l f 2 l = 2 m 1 ( l ) *
m1( l /2) , hence, any of the three involved f i l ters can beeasily computed from the other two. The fi l ters rn; ( | /21and m j ( l /21 are the inner and outer midmean f i l ters,
\t
fi
B
t ,
IS I
t t
t l
l'l
. lLI
(1
)'tn

d E
al'rg
r l -dr t tl ,
le
/ -r f
N
r)
la2),,:
IJ
-'dJ N.r '
rStr-
Rt iS ' l 'REP() AND tsOVlK: ADAPTIvF. TRI ! \ ' lMI tD MEAN FILTERS
which have very lavorable robustness properties. Thesefilters wil l be used in the adaptive strategy to be discussedshort ly .
B. Robustness Properties of Trimnted Mean Filters
The stat is t ica l propert ies of t r immed means have beentreated in considerab[e deta i l in the stat is t ics l i terature
120l-1231. Here, a few important propert ies of the smal lset of inner and outer mean fi l ters used in the adaptivetrimmed mean fi l ter are reviewed briefly. In evaluatingthe effectiveness of an L-estimator y ( a ) for estimating themean of a unimodal symmetric distribution F from M in-dependent observations, most authors t201-123) make useof the relqtiv,e fficienc'y
pn@) : var I r (a* ) | r ' ] / var Iy (o ) l r ] , (3 )
where Var Iy(a) | f ] is the var iance of the Z-est imatory (a) applied to observations from F, and a* is the coef-ficient vector of the minimum variance unbiased L-esti-mator (MVUE):
ax : arg min var Iy(o) l r ] ( 4 )
under the unbiasedness constraint at l = 1. Eff ic ientmethods for computing the MVUE are given in [ l ] .
Generally, inner means effect very reasonable effi-ciency as unbiased estimators of the mean for symmetricnoise distributions which are more heavy tailed than theGaussian, but are inefficient if the noise is, for example,uniformly distributed. Outer mean filters yield high effi-ciencies for symmetric distributions that are less heavytailed than the Gaussian; in particular, the midrangemj (0) is optimal if F is uniformly distributed.
The robustness properties of q-inner means have beenstudied with much greater detail than have those of a-outer means, particularly for small sample sizes. The rea-son for this is primarily that statisticians are often con-cerned with estimating population parameters from obser-vations contaminated by elements departing radically fromthe assumed model (usually called outliers). Since obser-vations containing outliers are often accurately modeledby heavy-tailed noise distributions, the inner means havefound many uses in such circumstances. However, thereare instances where the observed data may be truncatedor may obey shorter-tailed distributions, resulting from,e.g., coarse signal quantization or data clipping.
For signal smoothing purposes, we are most interestedin small (M < 20) to moderate sample sizes, dependingon the dimensionality of the signal the OS filter is to bedefined on. Several authors l20l-t231 have contributed afairly thorough analysis of the relative efficiencies of anumber of inner mean filters for many different symmetricnoise types, including the Gaussian, double-exponential,and logistic, for both small sample sizes (M < 20), andasymptotically (M --' co). Of the estimators considered,they found moderately trinrmed means (a = 0.2, corre-sponding to the 0.6-inner mean) to be most robust forsmall sample sizes, based on the high efficiency pr@)
1329
maintained over the class of distr ibut ions considered,whi le sl ight ly greater tr immings (a = 0.275, correspond-ing to the 0.45-inner mean) were required for very largesample sizes.
The adaptive trimmed nrean filter is based on the selec-t ion of an appropriate tr immed mean ( innerorouter) f i l terbased on local est imates of the tai l behavior of the noise(away from edges). For noise that is estimated to be ap-proximately Gaussian, one should obviously use the sim-ple average; similarly, if the noise is extremely heavytailed (more than the double-exponential), the sample me-dian is used. For noise real izat ions whose tai l behaviorlies between the Gaussian and double-exponential , a suit-ably trimmed mean whose behavior falls between that ofthe sample mean and median is required. For simpl ic i ty,the inner midmean mi ( l /2) is used when the noise tai lsare estimated to be heavier than the Gaussian but not ex-tremely impulsive. In [20], it was found that the efficiencyof the inner midmean is about 85 percent for Gaussianobservations and about 95 percent for double-exponentialobservations from sample sizes less than 20, compared toabout 88 and 92 percent for the maximin (among thoseconsidered) estimator, m1(0.6). For very large samplesizes, the asymptotic relative efficiency of the 0.5-innermean falls no lower than 81.47 (under a Gaussian as-sumption), while the 0.6-inner mean falls to 77 percent(under a double-exponential assumption). From theselimited results, one can see that the performances of the0.5- and 0.6-inner means and other similar inner meansare comparable. However, as the sample average per-forms very admirably for Gaussian-like noise possibili-ties. the 0.5-inner mean filter or inner midmean filtermi (l /2) is used in junction with the sample average andmedian in the adaptive trimmed mean filter.
There are fewer results available to guide the choice ofa suitable outer mean filter for estimating the signal whenthe noise element is found to be more shallow tailed thanthe Gaussian. The choice when the noise is extremelyshallow tailed (nearly uniform) can be taken to be themidrange mj (0) by default; for noise possibilities lessshallow tailed than the uniform, but less heavy tailed thanthe Gaussian, few results are available to guide the filterchoice. However, it is interesting to note that the innerand outer midmeans m10/2) and mj( l /2) have thesame relative efficiencies when the noise is Gaussian re-gardless of the sample size [24). This suggests that theouter midmean plays a role similar to the inner midmeanfor shallow-tailed noises, viz., it maintains high efficien-cies over a wide range of such distributions. In view ofthe fact that the outer midmean and inner midmean canbe computed from one another if the sample average isknown (as pointed out above), the outer midmean is usedas a robust estimator for noise distributions whose tailsare moderately shallow.
III. TUB Aoeprrvr Onoen Srerrsrrc Frlrp,n
In the preceding section, motivation was given for theuse of a number of robust estimators defined as inner and
1330
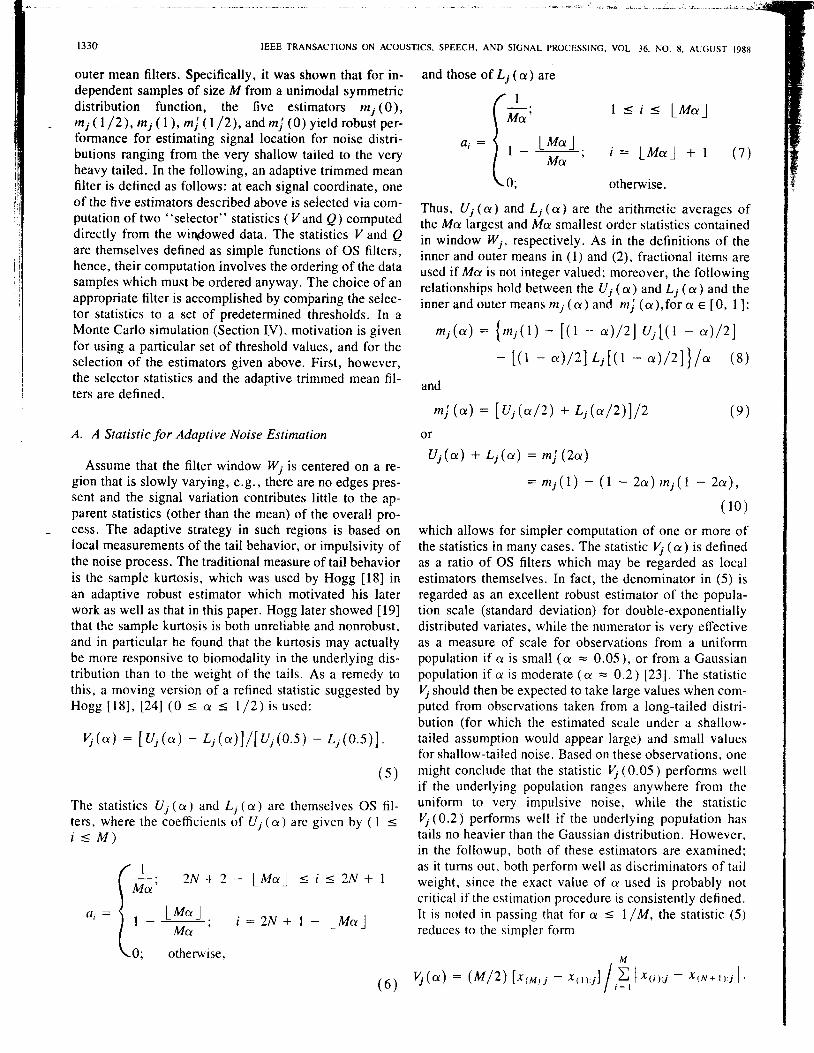
outer mean filters. Specifically, it was shown that for in-dependent samples of size M ftom a unimodal symmetricdistribution function, the five estimators mi (0),m1( l /2 ) , m i ( l ) , m j ( l /2 ) , and mj (0 ) y ie ld robus t per -formance for estimating signal location for noise distri-butions ranging from the very shallow tailed to the veryheavy tailed. In the following, an adaptive trimmed meanfilter is defined as follows: at each signal coordinate, oneof the five estimators described above is selected via com-putation of two "selector" statistics (V and Q) computeddirectly from the win$owed data. The statistics V and Qare themselves defined as simple functions of OS filters,hence, their computation involves the ordering of the datasamples which must be ordered anyway. The choice of anappropriate filter is accomplished by comparing the selec-tor statistics to a set of predetermined thresholds. In aMonte Carlo simulation (Section IV). motivation is givenfor using a particular set of threshold values, and for theselection of the estimators given above. First, however,the selector statistics and the adaptive trimmed mean fil-ters are defined.
A. A Statistic for Adaptive Noise Estimation
Assume that the filter window I7; is centered on a re-gion that is slowly varying, e.g., there are no edges pres-sent and the signal variation contributes little to the ap-parent statistics (other than the mean) of the overall pro-cess. The adaptive strategy in such regions is based onlocal measurements of the tail behavior, or impulsiviry ofthe noise process. The traditional measure of tail behavioris the sample kurtosis, which was used by Hogg [8] inan adaptive robust estimator which motivated his laterwork as well as that in this paper. Hogg later showed [9]that the sample kurtosis is both unreliable and nonrobust,and in particular he found that the kurtosis may actuallybe more responsive to biomodality in the underlying dis-tribution than to the weight of the tails. As a remedy tothis, a moving version of a refined statistic suggested byHogg [8 ] , 1241(O s d < 1 /2 ) i s used:
v i (o ) : [u , ( " ) - r i@) ] l [u j (0 .s ) - r j (0 .5 ) ] .
i s )
The stat is t ics U7(cy) and L1(c) are themselves OS f i l -ters, where the coef f ic ients of U7(a) are g iven by ( l <i < M )
IEEE TRANSACTIONS ON ACOUSTICS, SPEECH. AND SIGNAL PROCESSINC. VOL. 36, NO. 8, AUGUST 1988
and those of. L1@
(*"': l;,-
) are
l < i < lM" )
;= lMa )+ l
otherwise.
Thus, U7(o) and L1@) are the ar i thmetic averages ofthe Ma largest and Ma smallest order statistics containedin window I/;, respectively. As in the definitions of theinner and outer means in (l) and (2), fractional items areused if Mo is not integer valued; moreover, the followingrelationships hold between the U; ( o ) and L1 @) and theinner and outer means m1(a) and mj(a), for e e [0, I ] :
t ,m1@\: tu , r ( t ) - [ ( r - a ) / z ] u ; [ ( t -
" ) /2 ]( 8 )
(e)or
U i @ ) + L 1 @ ) : m j ( 2 a )
= m i ( l ) - ( r - 2 a ) r y ( r - 2 a ) ,
( l 0 )
which allows for simpler computation of one or more ofthe statistics in many cases. The statistic V1@) is definedas a ratio of OS filters which may be regarded as localestimators themselves. In fact, the denominator in (5) isregarded as an excellent robust estimator of the popula-tion scale (standard deviation) for double-exponentiallydistributed variates, while the numerator is very effectiveas a measure of scale for observations from a uniformpopulation if a is small (a = 0.05), or from a Gaussianpopulation if a is moderate (a - 0.2) [23]. The statistic/7 should then be expected to take large values when com-puted from observations taken from a long-tailed distri-bution (for which the estimated scale under a shallow-tailed assumption would appear large) and small valuesfor shallow-tailed noise. Based on these observations. onemight conclude that the statistic Vj(0.05 ) performs wellif the underlying population ranges anywhere from theuniform to very impulsive noise, while the statisticVj(0.2) performs well if the underlying population hastails no heavier than the Gaussian distribution. However,in the followup, both of these estimators are examined;as it tums out, both perform well as discriminators of tailweight, since the exact value of q used is probably notcritical if the estimation procedure is consistently defined.It is noted in passing that for a < I / M, the statistic (5)reduces to the simpler form
lMo lMa
and
* j ( " ) : lu i@/z) + L j (d /2 ) l l2
- l f r - " ) /21 1 i [0 - a) /z ] \ 1 "
( l
)
mo '
| ; ,
2 N + 2 - l M " ) < i < 2 N + l
ry:J; i : 2N + | - lMo)Ma
otherwise,
- x11y:r l f , t , l* , , , , ,
Q i :
( 6 ) v , ( a ) : ( M / 2 ) f x t u t , i

( * i @ i ) i f v , (a ) e I r ' - r , r ' ) ,I\ w h e r e l < i s s ,
V ; : (
l m t ( a ) i t V l @ ) e I r ; - ' , z i ) ,I\ w h e r e s + l < l c s * t + 1 .
RESTREPO AND BOVIK: ADAPTIVE TRIMMED MEAN FILTF,RS
The selector statistic V1 (a) can easily be shown to beboth location and scale independent, so that scaling thenoise or translating the signal does not result in differentvalues of V1@); moreover, /;(o) is uncorrelated withany inner or outer mean taken from the same set of sam-ples (since the noise distribution is assumed to be sym-metr ic [ l8 ] ) ; hence, an est imator based on select ion ofinner and/or outer trimmed means using the statistic Z; (a)
can be expected to be l ikewise unbiased.The use of the selector statistic V1 (a) as an estimate of
tail weight suggests a simple adaptive fi l tering strategy forestimating a smoothly varying signal in symmetric whitenoise. At each signal coordinate j in the n-dimensionalsignal { -r7 }, compute the statistic Z; ( a ) from the orderedsamples x1;; lying within the span of window Wi Gon-taining M = 2N * I signal samples ) centered at.t. Forf in i tesetsof outermeanpercentages0 < e i s d j s " '. oJ . I and inner mean percentages 0 3 a.7 < a2 <
o l d S 0 : T l S r z 3 . . . S T r * , * l = @ , t h e O U t p U t O fthe adaptive trimmed mean filter at coordinate j is takento be
( 1 1 )
An estimator such as the one above could be defined usingany number of inner and outer mean filters; however, inview of the fact that the defining OS filters are themselvesquite robust against noise variations, it is likely that theuse of a large set of filters is unnecessary and probablydesultory. Here, only the five simple estimators suggestedby the analysis in Section II are used, resulting in the fol-lowing adaptive filter:
for thresholdS rr < rz 3 ' ' ' 3 r+ and parameter c.Selection of the thresholds r; is addressed in Section IV;first, however, means for further modifying the filter (12)to deal with edges are described.
B. A Statistic for Adaptive Edge Estimation
The adaptive filter (12) described in the previous sec-tion can be expected to provide robust suppression ofnoise
r signals which are locally smoothly varying. However,many signals of practical importance (e.9., speech sig-nhls, images) carry much of their information in the formof sustained intensity changes, or edges. In the following,
133 I
it is assumed that the signal to be filtered consists ofsmoothly varying regions separated by edges. The innerand outer trimmed mean filters used in the adaptive filters(l l) and (12) are not generally appropriate for filteringnoise from a signal near edges, nor is the statistic V1 (u)generally appropriate for detecting the presence of edgesin noise. Clearly, the ideal OS filter for smoothing noisenear sharp edges is the median filter (or possibly an a-inner mean if a is small; however, the difference in theoutput would likely not be noticeable); in order to assurethe "selection" of the median near edges, the edges mustbe detected prior to computing the filter output.
There is an abundance of choices for the edge detectionscheme. Currently, the most popular edge detection strat-egies are those involving low-pass filtering tbllowed bydifferentiation, but such operators are quite sensitive tonoise, particularly impulse noise [26]. For detecting edgesin noise, several schemes based on order statistics havebeen recently proposed. These include gradient estimatesusing differences ofmedians [26], ranges and quasi-ranges
[27], and a zero-crossing based trimmed mean edge de-tector [9]. To maintain the consistency of the adaptivefilter and in order not to introduce an excess of additionalcomputation, this approach is used. Specifically, a quasi-range based edge detector is defined that performs quitewell for detecting edges in a large variety of noise possi-bilities, and has the additional advantage of being com-putationally efficient (as it requires the use of only twounweighted order statistics which must be computed any-way).
The pth-order quasi-range filter Qi(p) has OS filtercoef f i c ien ts aN+t+p = l , aN+t -p = -1 , and d i = 0o t h e r w i s e , f o r p e { 1 , 2 , ' ' , N } , h e n c e , Q i ( p ) =
xr lv+r+p1,1 - , r (N+t -py : ; . In tu i t i ve ly , Q i (p ) may be ex-pected to take small values when Wi spans a signal regionof small variation. If there is noise present, then p shouldbe taken to be fairly small to avoid the effects of spuriousdata. When lI! spans a region containing an edge, Qi ( n)should be expected to take greater values, provided thatp is sufficiently large that the ordered values x 1tt + | + p1,iand x,p*l -p):.; oro derived from samples on both sides ofthe edge. Moreover, the edge statistic should simply in-dicate the presence or absence of an edge v'ithin windowWi, as opposed to accurately locating the edge; this isparticularly important if the edge is not sharp. Simula-r ions have shown tharp : L(/V + l ) /2 J yields veryfavorable results, as it provides for both a high degree ofnoise suppression ( p is sufficiently small ) and edge sen-sitivity (p is sufficiently large). For a predeterminedthreshold /, the presence or absence of an edge at signalcoordinatey is asserted according to the predicate Qj(p)> t. Estimation of the appropriate threshold value t istypically determined by analyzing the noise power in theimage, although this approach does not always yield sat-isfactory results.
For appropriate inner and outer mean thesholds 11, r2,' ' ' , r 4 and edge threshold t, the adaptive trimmed meanfilter is then
(m j (O ) ; o<v i ( a )< r t
\ ^ ; 1 t 121 , 11 = v i ( o ) < ' :
, , : 1 m1 ( l ) i r = ' v i ( a ) I r t ( 12 )
lm1 ( t / z ) ; r j 3v i ( o )< ro
\ t r (o ) i r t < / ; ( c r ) < o .
t, t
i; dl l
, i i l

ililtiltil
iillill,B, n l
iil
ril' l l
l l
illli
t 5 J :
(
, r= {I
t
^ j ( 0 ) ; v i ( o ) e [ 0 , z 1 ) , Q i b ) = t
m j ( t / Z ) ; V i ( a ) e [ 2 1 , r 2 ) , Q i b ) = t
mi ! ) ; V i (a ) e [ r2 , r t ) , Q ib ) = t
m 1 Q / 2 ) ; v i ( a ) e [ 2 3 , r + ) , e i b ) = t
^ i @ ) ; V i ( e ) e [ r a , ; o ) , Q i ( p ) = t
^ iQ) ; Q ib) > t .
( r3)Fig. I depicts a block diagram illustrating the overall win-dowing, decision, and filtering technique.
C. Discussiort
The adaptive trimmed mean filter described in the pre-ceding section provides for uniformly robust smoothingperformance over a large variety of noise influences insignals containing locally smooth regions separated byedges. The need for an edge-sensitive statistic (such asQi) for choosing the appropriate filter in the absence ofknowledge about the nature of the noise is clear, since theedge-preserving median filter and OS filters with similarcoefficients (i.e., those heavily weighting the central or-dered values) are the only ones which provide simulta-neous noise suppression and edge preservation; away fromedges, however, these filters are very inefficient if thenoise is not "impulsive."
The need for a statistic which adapts to the noise atevery signal coordinate is less clear, since one might ex-pect the noise statistics to remain invariant throughout theextent of the signal. However, it should be noted that theadaptive trimmed mean filter relies on local measure-ments ofthe noise process, ratherthan being defined basedon global or ensemble descriptions of the process. Thereare many practical instances whereby the noise statisticsmay vary locally, even if they have a global description(other than in the obvious case where the noise is shift-variant), as follows.
. Digital signals are quantized to a finite number oflevels having an upper and a lower bound; if the signal iscontaminated by noise values which cause the signal toexceed these bounds, then the signal is typically trun-cated, reducing the range of values the noise may take inregions where the signal takes extreme values. In suchregions, the apparent tail length of the underlying noisedistribution will be decreased.
o There are certain instances where a signal may con-tain two or more noise processes having very different sta-tistics; e.9., a high-frequency noise with Gaussian statis-tics and an impulsive noise resulting from occasional biterrors. In this case, a simple averaging filter will provideoptimal smoothing performance everywhere except wherethe filter window contains an impulse, where a highlytrimmed mean filter may be desirable.
o Generally , local realizations of a noise process de-riving from a specific source cannot be expected to nec-essarify resemble the global statistics of the process. For
IEEE TRANSACTIONS ON ACOUSTICS, SPEECH. AND SICNAL PROCESSING, VOL. 36. NO. 8, AUCUST I98IJ
example, if the noise derives fiom a source with Gaussiancharacteristics, the statistic Vimay be expected to indicateotherwise at many places in the signal. In such an in-stance, an averaging filter will provide performance whichis globally superior to the other filters considered in theadaptive scheme; however, in windowed signal regionsI/; where Iz; indicates that the noise statistics are non-Gaussian, a different filter may actually give a closer es-timate of the underlying signal.
The additional computation in computing the noise andedge statistics Iz; and 0; is quite small, as the windoweddata values must be ordered to calculate the filter outputin any case. However, if the additional expense incurredin calculating the selector statistic Iz; as well as a differentestimate at each signal coordinate is too large for a par-ticular application, or if there is a clear indication that thenoise statistics are invariant over the entire signal, then itmay be useful to consider a sequential approach for esti-mating the actual noise density, as suggested in [9]. Byusing such a procedure, a single trimmed mean filter maybe arrived at for smoothing the signal, unless the edge-adaptive statistic Iz; is used. However, the resulting filtermay give less-than-robust performance for reasons similarto those outlined above.
IV. THnsssoLD AND Frr-reR Sel-rcrroN Vre MoNreCeRlo ANnI-vsts
Consider the family of generalized (two-sided) expo-nential densities
( 1 4 )
having the general fqfm "f (x; 0) : xr exp (x2l"r lo ) ,
w h e r e K t : ( A x ) / ' ) / 2 t ( l / P ) , K 2 : I t ( 3 / P ) /t( l /P\10/2, and where I is the ordinary Gamma func-tion. The densities are chosen to have zero-mean and unityvariance since the statistics that are to be analyzed areboth bias- and scale-invariant. This farnily of densitiesrepresents a broad range of noise behaviors ranging fiomv e r y i m p u l s i v e ( B < l ) , t o s h a l l o w t a i l e d ( 0 > 2 ) , a p -proaching the uniform density as p - oo. The family alsoincludes the double-exponent ial (P : l ) and Gaussian( I : 2) densities as special cases. The family of densi-ties d is similar to those used by several authors in ro-bustness studies 1281,129|1, and has also been used to de-r ive opt imal OS f i l ters t l l , t91.
In the following, the family of densities g is used as aparametrized model both for choosing the thresholds as-sociated with the adaptive statistic Vi, and to further mo-
O : { f 6 ; A ) : r e ( - o o , 6 ) , 0 e ( 0 , o " ; }
e [ t _ , , r , ) ?
Fig. l . Block diagram of the adapt ive t r inrmed mean f i l ter .
'*
RESTREPO AND BOVIK: ADAPTIVE TRIMMED MEAN FILTERS
TABLE !Sluple Varrl lcrs oF INNDR ANr) OrirrrR MErrs SnupLr, Syte M = 5
ml(0) m'1(t12) m , ( l ) m1(t/2)
I 333
TABLE VSevpls MelHs oF rHE SELECToR SrArlsrrcs V (0.05) AND V (0.2) Savpln
S v . e M = 5m;(0)
v(.05, V(.2,0.51 . 01 . 52 .03 .010 .0
o.7470.4400.3270.27 |0 .2180 .157
0.5260 .3350.2640.230o l q 6o t 5 5
0.2030 . 1 9 90 .198n t q n
0 .1990 .1 99
0.0750.1570.2010.2280.2580.300
0.0630.0450.229Q.27 |0.3210.393
0 .5t . 01 . 52 .0J . U
10.0
t .9281 . 8 3 8| .'19'l1 . 774| . ' l491 . 7 t 4
l .9281 . 8 3 8t.797
t . '149t . 7 t 4
TABLE I ISeupu VnnraNcEs oF INNER AND OurER MeeNs Sevpls Stzt M = 9
P m 1{0) m'1{rf2) m1(t) mJ(12) ml(0)
TABLE VISeuple MraNs oF rHE SELECToR SrArrsrrcs V (0.05) AND V (0.2) SAMpLE
S n e M = 9
v(.05) v(.2)0.51 .0l . )
2.O
10.0
0.9750.4450.281o.7070 . l 4 l0.070
0.3160.2010.1540.1300.1060.077
0.r040 .1070 .1080 .1090 . 1 l 00 .1 10
0.029n n750.1050.1 240.1450.r77
Q.o2s0.086o.1320.1 640.2020.260
0.5t . 01 . 5
3 .010.0
7.6142.2882 . t 467.0671.983l'865
1.945I . 8 1 2
7 5 17r7681
TABLE IIISAMPLE VARIANCES oF INNER AND OUrER MEANS SAMPLE Stze M = 15
ml(0) m'{t12) m1(t) m1(1t2) m1(0)
TABLE VIISeupu MeeNs oF rHE SELECTOR SrArrsrlcs V (0.05) eNn V (0.2) SAMPLE
Srzs M = 15
v(.05) v(.2)0.5l n
1 . 52 .0J . U
10.0
1 .1630.434o.2440.1660.100n n1{
0.1 840.t220.0930.07E0.062o.o42
0.0620.0630.06300630.0630.063
0.0150.0440.0640.0760.0910.n3
0.0120.0490.0810.1030 . 1 3 10.171
0.51 . 01 .5t n
3.010.0
J . J O O
1 a ) 1
2.4572.3t32.161r.952
2.0221 .858t.7821.7381.69 tr .628
TABLE IVSeupr-E VnnrlNcEs oF INNER exo Ourpn MslNs Seuple Stze M = 25
mi(o) m'102\ m1(l) m1(12) mr(O)
TABLE VIIISrrrlplr MEeNs oF THE SELECToR STArrsrtcs V (0.05) AND V (0.2) SAMPLE
Srze M = 25
v(.05) v(.2)0 .51 . 01 . 5) A
3.010.0
I . 3 1 50.41E0.2150.1370.0750.020
0 . 1 1 30.0730.0550.0460.0360.024
0.0390.0400.0400.0400.0400.040
0.mE0.0260.0390.0480.058o.o74
0.00s0.0260.0450.0600.0780. r03
0.5I . 01 . 52 .O3.010.0
].8742.97 5
2.431) ta1
1.970
, ) nq1
l .E7 Ir.785l . / J o
L6841 .615
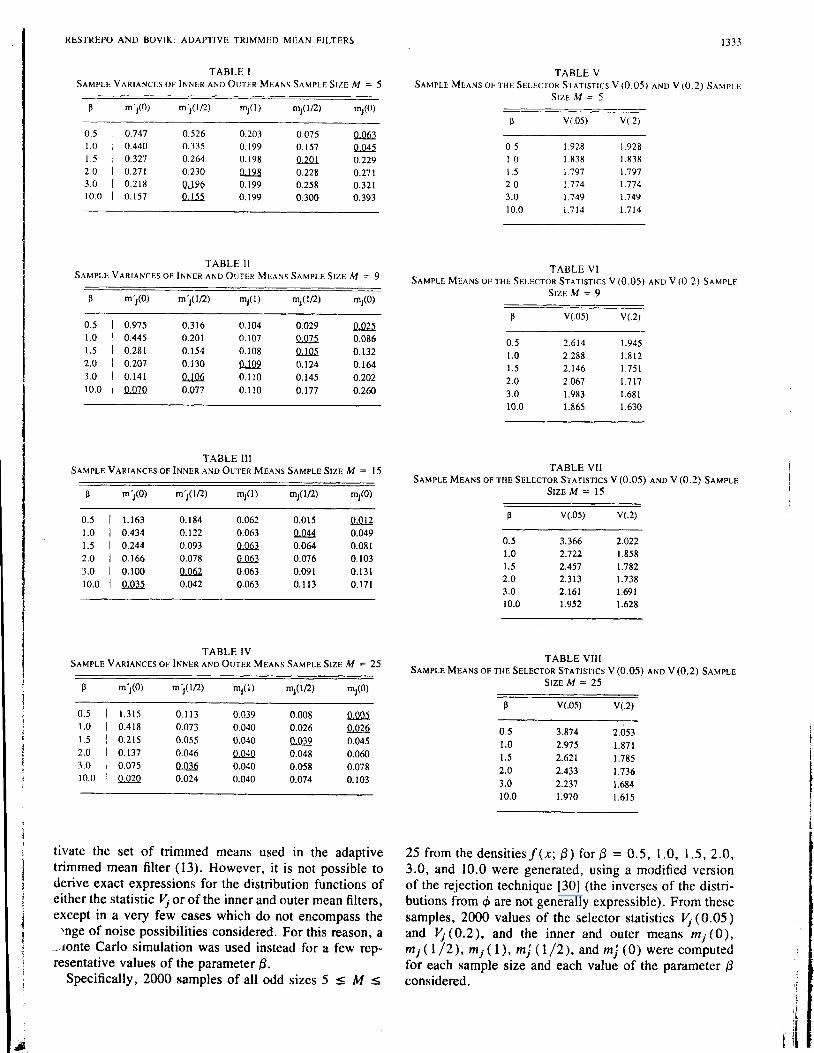
tivate the set of trimmed means used in the adaptivetrimmed mean filter (13). However, it is not possible toderive exact expressions for the distribution functions ofeither the statistic Iz; or of the inner and outer mean filters,except in a very few cases which do not encompass the\nge of noise possibilities considered. For this reason, a
-.lonte Carlo simulation was used instead for a few rep-resentative values of the parameter P.
Specifically, 2000 samples of all odd sizes 5 < M <
25 from the densit ies f (x; i l for B : 0.5, 1,0, 1.5,2.0,3.0, and 10.0 were generated, using a modified versionof the rejection technique [30] (the inverses of the distri-butions from 6 are not generally expressible). From thesesamples, 2000 values of the selector statistics Zj(0.05)and Vj(0.2), and the inner and outer means m;(O),m j ( l /2 ) , m i ( l ) , m j ( l /2 ) , and m; (0) were computedfor each sample size and each value of the parameter Bconsidered.
tI
tiI
, t
TI i l

t334
TABLE IXTxnesxolo Vnlups ron rHe SELecron Srertstrc V (0.05) ron All Ooo
Seup leSrzes | 3 M < 25
"2
f
7
l l
T J
l 5t 1
l 9
2 l
ZJ
IEEE TRANSACTIONS ON ACOLISTICS, SPEECH, AND SIGNAL PROCESSINC. VOL. ]6 , NO. t I . AUGUST I9 I ]8
l . 8 1 82.O432.2172.3622.4832.5902.6832.7692.8012.7962.798
1 .7861.97 r2.1071 1 1 1
2.3062.3852.4532.5 t42 .5352.5287 \ ) 1
1.7621 .9182.0252 . t t l2.1782.2372.287z .J - t - t
2.3462.3382.335
| 1 - t )
l . 8 5 1t.9241.9802.021?.0s72.086Z . L I J
7. t t72 . 1 0 82.104
TABLE XTnnrssor-o VALUEs FoR THE Se LEcror Sr.,rrrsrrc V (0.2) FoR ALL ODn
S e n p u e S r z e s l < M < ? 5
t2
f
791 1l 31 517t92 l
25
I . 8 1 81.748t.782t.'t991.7991.820I . 8 1 3L8191.8221.8221.828
1.786l .?081.734| .145t ,7431.7601 .751L7551 .7511 .755t . 7 6 l
t .762t .6791.6991.6871.7001 . 7 1 51.7041.7081.7081.7061 .7 l 0
I ? ? ?
1.6411 .656l'6381.6481.6601.6481.650| .649t .6461.650
Tables I-IV give the sample variances of each of theinner and outer means considered to three decimal digitsof accuracy, for sample sizes M = 5, 9, 15, and 25, wherethe underlined values indicate the minimum variance(highest efficiency) filter of those considered for eachvalue of 6. In order to conserve space, the results for theother sample sizes are not given, but are available in aseparate report [31]. As should be expected, those OS fi l-ters weighting the intermediate values are more efficientfor noises more heavy tailed than the Gaussian, and thoseweighting the extreme values are more efficient for noisewi th shal lower ta i ls .
Tables V-VI l l g ive the sample means of the selectorstat is t ics Vj (0.05) and Vt (0.2) to three d ig i ts of accu-racy, again for sample sizes M : -5, 9, 15, and 25; resultsfor the other sample s izes are a lso g iven in [31] . A l thoughthe sample variances are not given here, they were foundin every case to take magnitude no larger than l0 percentof the sample mean, and general ly were much smal ler . Inthis implementation, simple l inear interpolation was usedfor the thresholds z;. By interpreting the densities/(-r; 0)f o rp e [ 0 , 1 .25 ) , 0 e t 1 .25 , 1 .75 ) , P e i l . 75 , 2 .5 ) , Pe 12 .5 ,6 .5 ) , and 0 e [6 .5 , o ) as rep resen t i ng " ve ryheavy ta i led," "heavy ta i led," "Gaussian- l ike," "shal -low ta i led," and "very shal low ta i led," respect ive ly , thc 'thresholds 11 are defined by averaging the sample means
( d )
F ig .2 . D ig i t a l i n ragc o l down town Aus t i n , TX . ( a ; O r i g i na l , ( b ) w i t hadded hcavy ta i lcd noise. (c) wi th added Gaussian noise, (d) wi th addedsha l l ow - ta i l ed no i se .
I 336
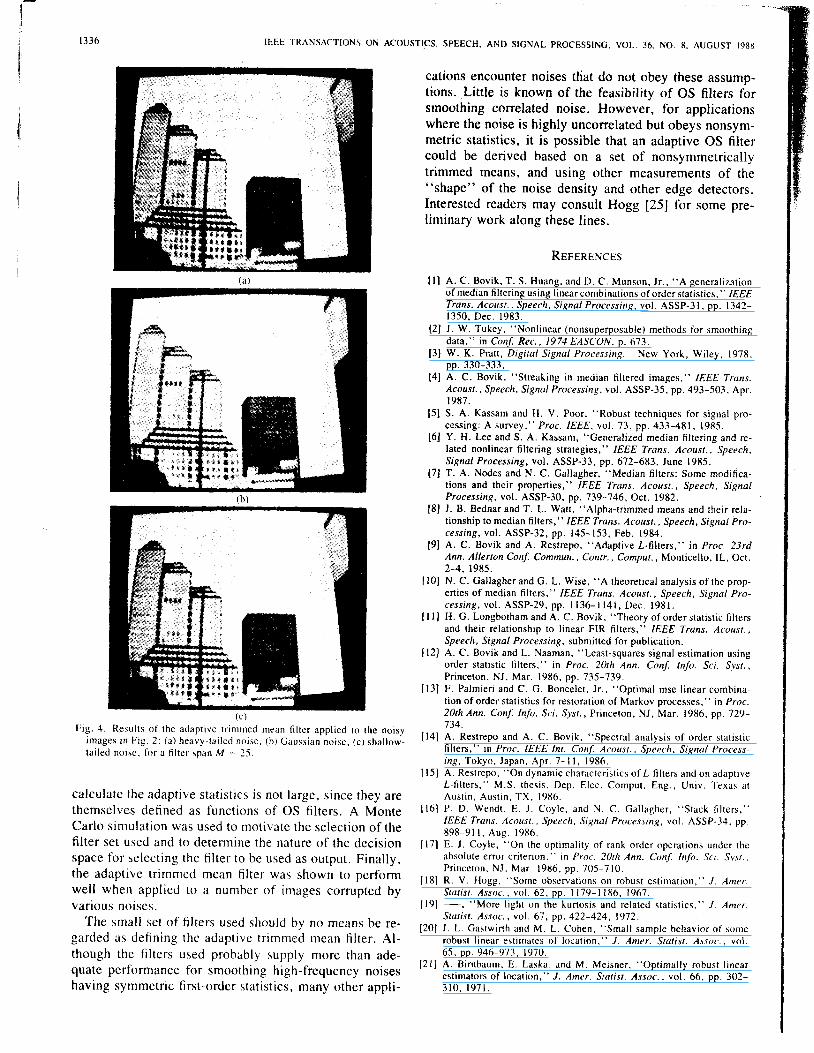
Fig. 4. Resul ts of the adapt ive ,nr l "n l .O mean f i l rer appl ied ro rhe noisyimages in Fig. 2: (a) heavy-ta i lcd noise. (b) Gaussian noise, (c) shal low-ta i led noise, for a f i l ter span M : 25.
calcula le the adapt ive stat is t ics is not large, s ince they arethemselves defined as functions of OS fi lters. A MonteCarlo simulation was used to motivate the selection of thefi lter set used and to determine the nature of the decisionspace tbr se lect ing the f i l ter to be used as output . F inal ly ,the adaptive trimmed mean fi l ter was shown to performwell when applied to a nunrber of images corrupted byvar ious noises.
The smal l set of f i l ters used should by no means be re-garded as def in ing thc adapt ive t r immed mean f i l ter . A l -though the fi l ters used probably supply more than ade-quate performance for smoothing high-frequency noiseshaving symmetric f irst-order statistics, many other appli-
IEEI1 RANSACTIONS ()N ACOUSTICS, SPEECH, AND SIGNAL PROCESSING. voL. 36. No. 8. AUGUST t98lt
cations encounter noises that do not obey these assump-tions. Little is known of the feasibility of OS filters forsmoothing correlated noise. However, for applicationswhere the noise is highly uncorrelated but obeys nonsym-metric statistics, it is possible that an adaptive OS filtercould be derived based on a set of nonsymmetricallytrimmed means, and using other measurements of the"shape" of the noise density and other edge detectors.Interested readers may consult Hogg [25] for some pre-liminary work along these lines.
Rgreneuces
[ ] A. C. Bovik, T. S. Huang, and D. C. Munson, Jr . , "A general izat ionof median f i l ter ing using I inearcombinat ions of order srat is t ics, ' ' /6t fTrans. Acoust . , Specch, Signal Processin,q, vol . ASSP-31, pp. 1342-1350 , Dec . 1983 .
t2 l J . W. Tukey, "Nonl inear (nonsuperposable) methods for smoothingdata," in Conf. Rec. , 1974 EASCON. p. 673.
t3l W. K. Pralt, Digital Signal Processing. New York, Wiley, 1978,pp .330 -333 .
t4l A. C. Bovik, "Streaking in median filtered images," IEEE Trans.Acoust., Speech, Signal Processing, vot. ASSP-35, pp.493-503. Apr.| 987.
l5 l S. A. Kassam and H. V. Poor. "Robust techniques for s ignal pro-cessing: A survey," Proc. IEEE. vol . 73, pp.433-481, 1985.
t6l Y. H. Lee and S. A. Kassam, "Gencralized median filtering and re-lated nonlinear filtering strategies," IEEE Trans. Acoust., Speech,Signal Processing, vol. ASSP-33, pp.672-681, June 1985.
l7l T. A. Nodes and N. C. Gallagher, "Median filters: Some modifica-tions and their properties," IEEE Trans. Acoust., Speech, SignalProcessing, vol. ASSP-3O, pp. 739-746, Oct. 1982.
t8 l J . B. Bednar and T. L. Watt , "Alpha-tr immed means and rheir re la-tionship to median filters,' ' I EEE Trans. Acoust. , Speech, Signal Pro-cessing, vol . ASSP-32, pp. 145-153, Feb. 1984.
t9l A. C. Bovik and A. Restrepo, "Adaptive l-filrers," in Proc. 23rdAnn. Allerton Conf. Commun. , Contr., Comput., Monticello, IL, Oct.2-4, 1985.
I l0 l N. C. Gal lagherand G. L. Wise, "A theoret ical analysis of the prop-erties of nredian filters," IEEE Trans. Acoust., Speech, Signal Pro-cess ing , vo l . ASSP-29 , pp . l l 36 -1141 , Dec . 1981 .
l l l l H . G . Longbo thamandA . C . Bov i k , "Theo ryo f o rde rs ta r i s t i c f i l t e r sand their relationship to linear FIR filters," IEEE Trans. Acoust.,Speech, Signal Processing, submitted for publication.
[2] A. C. Bovik and L. Naaman, "Least-squares s ignal est imat ion usingorder statistic lilters," in Proc. 20th Ann. Conf. lnfo. Scl. S_ysr.,Pr inceton, NJ, Mar. 1986, pp.
'135-739.
[3] F. Palmier i and C. G. Boncelet . Jr . . "Opt imal mse l inearcombina-tion of order statistics for restoration of Markov processes,' ' in Proc.20th Ann. Conf. Info. Scr. Sysl., Princeton, NJ, Mar. 1986, pp. 729-734.
[4] A. Restrepo and A. C. Bovik, "Spectra l analysis of order star is t icfilters," in Proc. IEEE Int. Conf. Acoust., Speech, Signal Process-ing, Tokyo, Japan. Apr. 7- I | , I 986.
I l5] A. Restrepo, "On dynamic character is t ics of L- f i l ters and on adapt iveL - f i l t e r s , " M .S . t hes i s , Dep . E lec . Compu t . Eng . , Un i v . Texas a tAus t i n , Aus t i n , TX . 1986 .
[6] P. D. Wendt, E. J. Coyle, and N. C. Gal lagher, "Stack f i l ters,"IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-34, pp.898 -91 1 , Aug . 1986 .
[7] E. J. Coyle, "On the opt imal i ty of rank order operat ions under theabsolute error criterion." in Proc. 20th Ann. Cortf. Ittfo. Scl. S.y.r1.,Pr inceton, NJ. Mar. 1986, pp. 705-710.
l l8 l R. V. Hogg, "Some observat ions on robust est imat ion," J. Amer.S ta t i s t . Assoc . , vo l . 62 , pp . l l 79 -1186 .1967 .
I l9 l - , "More l ight on the kurtosts and re lated stat is t ics," J. Amer.Star is t . Assoc. , vol . 67, pp.422-424, 1972.
I2Ol l . L. Gastwir th and M. L. Cohen, "Smal l sample behavior of somerobust l inear est imates of locat ion," J. Amer. Stat is t . Assoc. , vol .65, pp.946-913, t970.
[21] A. Birnbaum, E. Laska, and M. Meisner, "Opt imal ly robust l inearest imators of locat ion," J. Amer. Stat is t . Assoc. , vol . 66, pp. 302-3 1 0 . l 9 7 l .
RESTREPO AND BOYIK: ADAPTIVE TRIMMED MEAN f ILTERS
I22l E. L. Crow and M. M. Siddiqui , "Robust est imat ion of locar ion,"J. Amer. Stat isr . Assoc. , vol .62. pp. 353-389, 1967.
l23l H. A. David, Order Srat is t i< 's . New York: Wi ley, 1981.[24] P. Prescot( and R, V. Hogg, "Tr immed and ouler means and their
var iances." Amer. Stat isr ic . , vol . 31, pp. 156-157, Nov. 1972.l25l R. V. Hogg, "Adapt ive robust procedures: A part ia l review and some
suggest ions for fur ther appl icat ions and theory," J. Amer. Stat is t .,4ssoc. , vol . 69, pp. 909-923, 1974.
[26] A. C. Bovik and D. C. Munson, Jr . , "Edge detect ion using mediancomparisons," Comput. Vision, Craphics, Image Processing, uol. 33,pp . 377 -389 . Ma r . 1986 .
[27] I . Pi tas and A. N. Venetsanopoulos, "Edge detectors based on non-linear hlters," IEEE 7rans. Pauern Anal. Machine Intell., vol.PAMI -8 , pp . 538 550 , 1986 .
l28l G. C. Tiao and D. R. Lund, "The use of OLUMV est imators in in-ference robustness s iudies of the locat ion parameter o[ a c lass of sym-metr ic d istnbut ions," J. A,ner. Stat isr . .4.rsoc. , vol . 65, pp. 37I-386,Mar. 1970.
[29] G- E. P. Box and C. C. Tiao, "A funher look at robustness v iaBayes's theorem," Biomerr iko, vol . 49, pp. 419-432, 1962.
[30] J. Von Neuman, "Var ious techniques used in connect ion wi th ran-dorn digits," Ncu. Bureau Standards Appl. Math. Ser., vol. 12, pp.3 6 - 3 8 , 1 9 5 1 .
[31] A. Restrepo and A. C. Bovik, "Adapt ive order stat is t ic f i l ters forimage restorat ion-With tables." Computer Vis ion Res. Center Tech.Rep. TR-87-4-36, Univ. Texas at Aust in, Apr. 1987.
t337
Alf redo Restrepo (S'871 was bom in Bogot i i , Co-lumbia, on Novenrber 2U, 1959. He rcceived thedegrec of Ingcniero Electrr in ico f rom the Pont i f i -c ia Univers idad Javer iana at Bogotd in 1983, andthe M.S. dcgree in e lcctr ical and computer cngi-ncer ing f rom the Univers i ty of Texas in May 1986whi le supportcd by a Fui lbrrght Scholarship.
He worked as a Le cturer whi le at lhe Pont ihclaUnivers idad Javer iana, as wel l as at Texins deColombia as a Laboratory Engineer. Current ly hcts working toward the Ph.D. degree in e lectr ical
and con tpu te reng inee r i ng a t ( he Un i ve rs i t y o f Tcxas a t Aus t i n , whc rc heis serv ing as a Teaching Assistant . His rcsearch interests inc lude stat is t icals i gn l l p rocess ing and compu te r v i : i r r n .
Alan Conrad Bovik (S'80-M't l4) . fbr a photograph and biography. see p.1074 o f t he Ju l y 1988 i s sue o f t h i s TRANsAc r toNs .
Related Documents











