arXiv:1604.03835v1 [astro-ph.SR] 13 Apr 2016 Accepted for publication in J. Plasma Phys. 1 LECTURE NOTES Astrophysical fluid dynamics Gordon I. Ogilvie† Department of Applied Mathematics and Theoretical Physics, University of Cambridge, Centre for Mathematical Sciences, Wilberforce Road, Cambridge CB3 0WA, UK (Accepted 10 April 2016) These lecture notes and example problems are based on a course given at the University of Cambridge in Part III of the Mathematical Tripos. Fluid dynamics is involved in a very wide range of astrophysical phenomena, such as the formation and internal dynamics of stars and giant planets, the workings of jets and accretion discs around stars and black holes, and the dynamics of the expanding Universe. Effects that can be important in astrophysical fluids include compressibility, self-gravitation and the dynamical influence of the magnetic field that is ‘frozen in’ to a highly conducting plasma. The basic models introduced and applied in this course are Newtonian gas dynamics and magnetohydrodynamics (MHD) for an ideal compressible fluid. The mathematical structure of the governing equations and the associated conservation laws are explored in some detail because of their importance for both analytical and numerical methods of solution, as well as for physical interpretation. Linear and nonlinear waves, including shocks and other discontinuities, are discussed. The spherical blast wave resulting from a supernova, and involving a strong shock, is a classic problem that can be solved ana- lytically. Steady solutions with spherical or axial symmetry reveal the physics of winds and jets from stars and discs. The linearized equations determine the oscillation modes of astrophysical bodies, as well as determining their stability and their response to tidal forcing. CONTENTS 1. Introduction 3 1.1. Areas of application 3 1.2. Theoretical varieties 4 1.3. Characteristic features 4 2. Ideal gas dynamics 5 2.1. Fluid variables 5 2.2. Eulerian and Lagrangian viewpoints 5 2.3. Material points and structures 5 2.4. Equation of mass conservation 6 2.5. Equation of motion 6 2.6. Poisson’s equation 6 2.7. Thermal energy equation 7 2.8. Simplified models 8 2.9. Microphysical basis 8 † e-mail address for correspondence: [email protected]

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

arX
iv:1
604.
0383
5v1
[as
tro-
ph.S
R]
13
Apr
201
6
Accepted for publication in J. Plasma Phys. 1
LECTURE NOTESAstrophysical fluid dynamics
Gordon I. Ogilvie†Department of Applied Mathematics and Theoretical Physics, University of Cambridge,
Centre for Mathematical Sciences, Wilberforce Road, Cambridge CB3 0WA, UK
(Accepted 10 April 2016)
These lecture notes and example problems are based on a course given at the Universityof Cambridge in Part III of the Mathematical Tripos.Fluid dynamics is involved in a very wide range of astrophysical phenomena, such
as the formation and internal dynamics of stars and giant planets, the workings of jetsand accretion discs around stars and black holes, and the dynamics of the expandingUniverse. Effects that can be important in astrophysical fluids include compressibility,self-gravitation and the dynamical influence of the magnetic field that is ‘frozen in’ to ahighly conducting plasma.The basic models introduced and applied in this course are Newtonian gas dynamics
and magnetohydrodynamics (MHD) for an ideal compressible fluid. The mathematicalstructure of the governing equations and the associated conservation laws are exploredin some detail because of their importance for both analytical and numerical methodsof solution, as well as for physical interpretation. Linear and nonlinear waves, includingshocks and other discontinuities, are discussed. The spherical blast wave resulting froma supernova, and involving a strong shock, is a classic problem that can be solved ana-lytically. Steady solutions with spherical or axial symmetry reveal the physics of windsand jets from stars and discs. The linearized equations determine the oscillation modesof astrophysical bodies, as well as determining their stability and their response to tidalforcing.
CONTENTS
1. Introduction 3
1.1. Areas of application 3
1.2. Theoretical varieties 4
1.3. Characteristic features 42. Ideal gas dynamics 5
2.1. Fluid variables 5
2.2. Eulerian and Lagrangian viewpoints 5
2.3. Material points and structures 5
2.4. Equation of mass conservation 6
2.5. Equation of motion 6
2.6. Poisson’s equation 6
2.7. Thermal energy equation 7
2.8. Simplified models 8
2.9. Microphysical basis 8
† e-mail address for correspondence: [email protected]

2 Gordon I. Ogilvie
3. Ideal magnetohydrodynamics 103.1. Elementary derivation of the MHD equations 103.2. Physical interpretation of MHD 14
4. Conservation laws, symmetries and hyperbolic structure 184.1. Introduction 184.2. Synthesis of the total energy equation 194.3. Other conservation laws in ideal MHD 204.4. Symmetries of the equations 214.5. Hyperbolic structure 224.6. Stress tensor and virial theorem 24
5. Linear waves in homogeneous media 266. Nonlinear waves, shocks and other discontinuities 29
6.1. One-dimensional gas dynamics 296.2. General analysis of simple nonlinear waves 336.3. Shocks and other discontinuities 34
7. Spherical blast waves: supernovae 397.1. Introduction 397.2. Governing equations 397.3. Dimensional analysis 407.4. Similarity solution 407.5. Dimensionless equations 407.6. First integral 407.7. Applications 42
8. Spherically symmetric steady flows: stellar winds and accretion 438.1. Introduction 438.2. Basic equations 438.3. First treatment 438.4. Second treatment 448.5. Stellar wind 468.6. Accretion 46
9. Axisymmetric rotating magnetized flows: astrophysical jets 479.1. Introduction 479.2. Representation of an axisymmetric magnetic field 479.3. Mass loading and angular velocity 489.4. Entropy 499.5. Angular momentum 499.6. The Alfven surface 499.7. The Bernoulli function 509.8. Summary 529.9. Acceleration from the surface of an accretion disc 529.10. Magnetically driven accretion 53
10.Lagrangian formulation of ideal MHD 5410.1. The Lagrangian viewpoint 5410.2. The deformation tensor 5410.3. Geometrical conservation laws 5510.4. The Lagrangian of ideal MHD 5610.5. The Lagrangian displacement 5710.6. The Lagrangian for a perturbed flow 5810.7. Notes on linear perturbations 60

Astrophysical fluid dynamics 3
11.Waves and instabilities in stratified rotating astrophysical bodies 6111.1. The energy principle 6111.2. Spherically symmetric star 6311.3. Modes of an incompressible sphere 6411.4. The plane-parallel atmosphere 6511.5. Tidally forced oscillations 7111.6. Rotating fluid bodies 75
Appendix A. Examples 80A.1. Validity of a fluid approach 80A.2. Vorticity equation 80A.3. Homogeneous expansion or contraction 80A.4. Dynamics of ellipsoidal bodies 80A.5. Resistive MHD 81A.6. Flux freezing 81A.7. Equilibrium of a solar prominence 82A.8. Equilibrium of a magnetic star 82A.9. Force-free magnetic fields 82A.10.Helicity 83A.11.Variational principles 83A.12.Friedrichs diagrams 84A.13.Shock relations 84A.14.Oblique shocks 84A.15.The Riemann problem 85A.16.Nonlinear waves in incompressible MHD 85A.17.Spherical blast waves 85A.18.Accretion on to a black hole 86A.19.Spherical flow in a power-law potential 86A.20.Rotating outflows 86A.21.Critical points of magnetized outflows 87A.22.Radial oscillations of a star 87A.23.Waves in an isothermal atmosphere 88A.24.Gravitational instability of a slab 88A.25.Magnetic buoyancy instabilities 89A.26.Waves in a rotating fluid 89
Appendix B. Electromagnetic units 90Appendix C. Summary of notation 91
1. Introduction
1.1. Areas of application
Astrophysical fluid dynamics (AFD) is a theory relevant to the description of the interiorsof stars and planets, exterior phenomena such as discs, winds and jets, and also theinterstellar medium, the intergalactic medium and cosmology itself. A fluid descriptionis not applicable (i) in regions that are solidified, such as the rocky or icy cores of giantplanets (under certain conditions) and the crusts of neutron stars, and (ii) in very tenuousregions where the medium is not sufficiently collisional (see Section 2.9.3).

4 Gordon I. Ogilvie
Important areas of application include:
• Instabilities in astrophysical fluids• Convection• Differential rotation and meridional flows in stars• Stellar oscillations driven by convection, instabilities or tidal forcing• Astrophysical dynamos• Magnetospheres of stars, planets and black holes• Interacting binary stars and Roche-lobe overflow• Tidal disruption and stellar collisions• Supernovae• Planetary nebulae• Jets and winds from stars and discs• Star formation and the physics of the interstellar medium• Astrophysical discs, including protoplanetary discs, accretion discs in interacting
binary stars and galactic nuclei, planetary rings, etc.• Other accretion flows (Bondi, Bondi–Hoyle, etc.)• Processes related to planet formation and planet–disc interactions• Planetary atmospheric dynamics• Galaxy clusters and the physics of the intergalactic medium• Cosmology and structure formation
1.2. Theoretical varieties
There are various flavours of AFD in common use. The basic model involves a compress-ible, inviscid fluid and is Newtonian (i.e. non-relativistic). This is known as hydrodynam-ics (HD) or gas dynamics (to distinguish it from incompressible hydrodynamics). Thethermal physics of the fluid may be treated in different ways, either by assuming it to beisothermal or adiabatic, or by including radiative processes in varying levels of detail.
Magnetohydrodynamics (MHD) generalizes this theory by including the dynamical ef-fects of a magnetic field. Often the fluid is assumed to be perfectly electrically conducting(ideal MHD). One can also include the dynamical (rather than thermal) effects of radia-tion, resulting in a theory of radiation (magneto)hydrodynamics. Dissipative effects suchas viscosity and resistivity can be included. All these theories can also be formulated ina relativistic framework.
• HD: hydrodynamics• MHD: magnetohydrodynamics• RHD: radiation hydrodynamics• RMHD: radiation magnetohydrodynamics• GRHD: general relativistic hydrodynamics• GRRMHD: general relativistic radiation magnetohydrodynamics, etc.
1.3. Characteristic features
AFD typically differs from ‘laboratory’ or ‘engineering’ fluid dynamics in the relativeimportance of certain effects. Compressibility and gravitation are often important inAFD, while magnetic fields, radiation forces and relativistic phenomena are important insome applications. Effects that are often unimportant in AFD include viscosity, surfacetension and the presence of solid boundaries.

Astrophysical fluid dynamics 5
2. Ideal gas dynamics
2.1. Fluid variables
A fluid is characterized by a velocity field u(x, t) and two independent thermodynamicproperties. Most useful are the dynamical variables: the pressure p(x, t) and the massdensity ρ(x, t). Other properties, e.g. temperature T , can be regarded as functions of pand ρ. The specific volume (volume per unit mass) is v = 1/ρ.We neglect the possible complications of variable chemical composition associated with
chemical and nuclear reactions, ionization and recombination.
2.2. Eulerian and Lagrangian viewpoints
In the Eulerian viewpoint we consider how fluid properties vary in time at a point thatis fixed in space, i.e. attached to the (usually inertial) coordinate system. The Euleriantime-derivative is simply the partial differential operator
∂
∂t. (2.1)
In the Lagrangian viewpoint we consider how fluid properties vary in time at a pointthat moves with the fluid at velocity u(x, t). The Lagrangian time-derivative is then
D
Dt=
∂
∂t+ u · ∇. (2.2)
2.3. Material points and structures
A material point is an idealized fluid element, a point that moves with the bulk velocityu(x, t) of the fluid. (Note that the true particles of which the fluid is composed havein addition a random thermal motion.) Material curves, surfaces and volumes are geo-metrical structures composed of fluid elements; they move with the fluid flow and aredistorted by it.An infinitesimal material line element δx (Figure 1) evolves according to
D δx
Dt= δu = δx · ∇u. (2.3)
It changes its length and/or orientation in the presence of a velocity gradient. (Since δxis only a time-dependent vector rather than a vector field, the time-derivative could bewritten as an ordinary derivative d/dt. The notation D/Dt is used here to remind us thatδx is a material structure that moves with the fluid.)Infinitesimal material surface and volume elements can be defined from two or three
material line elements according to the vector product and the triple scalar product(Figure 1)
δS = δx(1)× δx(2), δV = δx(1)
· δx(2)× δx(3). (2.4)
They therefore evolve according to
D δS
Dt= (∇ · u) δS − (∇u) · δS,
D δV
Dt= (∇ · u) δV, (2.5)
as follows from the above equations (exercise). The second result is easier to understand:the volume element increases when the flow is divergent. These equations are most easilyderived using Cartesian tensor notation. In this notation the equation for δS reads
D δSi
Dt=∂uj∂xj
δSi −∂uj∂xi
δSj . (2.6)

6 Gordon I. Ogilvie
Figure 1. Examples of material line, surface and volume elements.
2.4. Equation of mass conservation
The equation of mass conservation,
∂ρ
∂t+∇ · (ρu) = 0, (2.7)
has the typical form of a conservation law: ρ is the mass density (mass per unit volume)and ρu is the mass flux density (mass flux per unit area). An alternative form of thesame equation is
Dρ
Dt= −ρ∇ · u. (2.8)
If δm = ρ δV is a material mass element, it can be seen that mass is conserved in theform
D δm
Dt= 0. (2.9)
2.5. Equation of motion
The equation of motion,
ρDu
Dt= −ρ∇Φ−∇p, (2.10)
derives from Newton’s second law per unit volume with gravitational and pressure forces.Φ(x, t) is the gravitational potential and g = −∇Φ is the gravitational field. The forcedue to pressure acting on a volume V with bounding surface S is
−∫
S
p dS =
∫
V
(−∇p) dV. (2.11)
Viscous forces are neglected in ideal gas dynamics.
2.6. Poisson’s equation
The gravitational potential is related to the mass density by Poisson’s equation,
∇2Φ = 4πGρ, (2.12)
where G is Newton’s constant. The solution
Φ(x, t) = Φint +Φext = −G∫
V
ρ(x′, t)
|x′ − x| d3x′ −G
∫
V
ρ(x′, t)
|x′ − x| d3x′ (2.13)
generally involves contributions from both the fluid region V under consideration andthe exterior region V .A non-self-gravitating fluid is one of negligible mass for which Φint can be neglected.

Astrophysical fluid dynamics 7
More generally, the Cowling approximation† consists of treating Φ as being specified inadvance, so that Poisson’s equation is not coupled to the other equations.
2.7. Thermal energy equation
In the absence of non-adiabatic heating (e.g. by viscous dissipation or nuclear reactions)and cooling (e.g. by radiation or conduction),
Ds
Dt= 0, (2.14)
where s is the specific entropy (entropy per unit mass). Fluid elements undergo reversiblethermodynamic changes and preserve their entropy.This condition is violated in shocks (see Section 6.3).The thermal variables (T, s) can be related to the dynamical variables (p, ρ) via an
equation of state and standard thermodynamic identities. The most important case isthat of an ideal gas together with black-body radiation,
p = pg + pr =kρT
µmH+
4σT 4
3c, (2.15)
where k is Boltzmann’s constant, mH is the mass of the hydrogen atom, σ is Stefan’sconstant and c is the speed of light. µ is the mean molecular weight (the average massof the particles in units of mH), equal to 2.0 for molecular hydrogen, 1.0 for atomichydrogen, 0.5 for fully ionized hydrogen and about 0.6 for ionized matter of typicalcosmic abundances. Radiation pressure is usually negligible except in the centres of high-mass stars and in the immediate environments of neutron stars and black holes. Thepressure of an ideal gas is often written in the form RρT/µ, where R = k/mH is aversion of the universal gas constant.We define the first adiabatic exponent
Γ1 =
(
∂ ln p
∂ ln ρ
)
s
, (2.16)
which is related to the ratio of specific heat capacities
γ =cpcv
=
T
(
∂s
∂T
)
p
T
(
∂s
∂T
)
v
(2.17)
by (exercise)
Γ1 = χργ, (2.18)
where
χρ =
(
∂ ln p
∂ ln ρ
)
T
(2.19)
can be found from the equation of state. We can then rewrite the thermal energy equationas
Dp
Dt=
Γ1p
ρ
Dρ
Dt= −Γ1p∇ · u. (2.20)
For an ideal gas with negligible radiation pressure, χρ = 1 and so Γ1 = γ. Adopting
† Thomas George Cowling (1906–1990), British.

8 Gordon I. Ogilvie
this very common assumption, we write
Dp
Dt= −γp∇ · u. (2.21)
2.8. Simplified models
A perfect gas may be defined as an ideal gas with constant cv, cp, γ and µ. Equipartitionof energy for a classical gas with n degrees of freedom per particle gives γ = 1 + 2/n.For a classical monatomic gas with n = 3 translational degrees of freedom, γ = 5/3.This is relevant for fully ionized matter. For a classical diatomic gas with two additionalrotational degrees of freedom, n = 5 and γ = 7/5. This is relevant for molecular hydrogen.In reality Γ1 is variable when the gas undergoes ionization or when the gas and radiationpressures are comparable. The specific internal energy (or thermal energy) of a perfectgas is
e =p
(γ − 1)ρ
[
=n
µmH
12kT
]
. (2.22)
(Note that each particle has an internal energy of 12kT per degree of freedom, and the
number of particles per unit mass is 1/µmH.)A barotropic fluid is an idealized situation in which the relation p(ρ) is known in
advance. We can then dispense with the thermal energy equation. e.g. if the gas is strictlyisothermal and perfect, then p = c2sρ with cs = constant being the isothermal soundspeed. Alternatively, if the gas is strictly homentropic and perfect, then p = Kργ withK = constant.An incompressible fluid is an idealized situation in which Dρ/Dt = 0, implying ∇·u =
0. This can be achieved formally by taking the limit γ → ∞. The approximation ofincompressibility eliminates acoustic phenomena from the dynamics.The ideal gas law itself is not valid at very high densities or where quantum degeneracy
is important.
2.9. Microphysical basis
It is useful to understand the way in which the fluid-dynamical equations are derived frommicrophysical considerations. The simplest model involves identical neutral particles ofmass m of negligible size with no internal degrees of freedom.
2.9.1. The Boltzmann equation
Between collisions, particles follow Hamiltonian trajectories in their six-dimensional(x,v) phase space:
xi = vi, vi = ai = − ∂Φ
∂xi. (2.23)
The distribution function f(x,v, t) specifies the number density of particles in phasespace. The velocity moments of f define the number density n(x, t) in real space, thebulk velocity u(x, t) and the velocity dispersion c(x, t) according to
∫
f d3v = n,
∫
vf d3v = nu,
∫
|v − u|2f d3v = 3nc2. (2.24)
Equivalently,∫
v2f d3v = n(u2 + 3c2). (2.25)
The relation between velocity dispersion and temperature is kT = mc2.In the absence of collisions, f is conserved following the Hamiltonian flow in phase

Astrophysical fluid dynamics 9
space. This is because particles are conserved and the flow in phase space is incompressible(Liouville’s theorem). More generally, f evolves according to Boltzmann’s equation,
∂f
∂t+ vj
∂f
∂xj+ aj
∂f
∂vj=
(
∂f
∂t
)
c
. (2.26)
The collision term on the right-hand side is a complicated integral operator but has threesimple properties corresponding to the conservation of mass, momentum and energy incollisions:
∫
m
(
∂f
∂t
)
c
d3v = 0,
∫
mv
(
∂f
∂t
)
c
d3v = 0,
∫
12mv
2
(
∂f
∂t
)
c
d3v = 0.
(2.27)The collision term is local in x (not even involving derivatives) although it does involveintegrals over v. The equation (∂f/∂t)c = 0 has the general solution
f = fM = (2πc2)−3/2n exp
(
−|v − u|22c2
)
, (2.28)
with parameters n, u and c that may depend on x. This is the Maxwellian distribution.
2.9.2. Derivation of fluid equations
A crude but illuminating model of the collision operator is the BGK approximation(
∂f
∂t
)
c
≈ − 1
τ(f − fM) (2.29)
where fm is a Maxwellian distribution with the same n, u and c as f , and τ is therelaxation time. This can be identified approximately with the mean free flight time ofparticles between collisions. In other words the collisions attempt to restore a Maxwelliandistribution on a characteristic time-scale τ . They do this by randomizing the particlevelocities in a way consistent with the conservation of momentum and energy.If the characteristic time-scale of the fluid flow is much greater than τ , then the collision
term dominates the Boltzmann equation and f must be very close to fM. This is thehydrodynamic limit.The velocity moments of fM can be determined from standard Gaussian integrals, in
particular (exercise)∫
fM d3v = n,
∫
vifM d3v = nui, (2.30)
∫
vivjfM d3v = n(uiuj + c2δij),
∫
v2vifM d3v = n(u2 + 5c2)ui. (2.31)
We obtain equations for mass, momentum and energy by taking moments of the Boltz-mann equation weighted by (m,mvi,
12mv
2). In each case the collision term integratesto zero because of its conservative properties, and the ∂/∂vj term can be integrated byparts. We replace f with fM when evaluating the left-hand sides and note that mn = ρ:
∂ρ
∂t+
∂
∂xi(ρui) = 0, (2.32)
∂
∂t(ρui) +
∂
∂xj
[
ρ(uiuj + c2δij)]
− ρai = 0, (2.33)
∂
∂t
(
12ρu
2 + 32ρc
2)
+∂
∂xi
[
(12ρu2 + 5
2ρc2)ui
]
− ρuiai = 0. (2.34)

10 Gordon I. Ogilvie
These are equivalent to the equations of ideal gas dynamics in conservative form (seeSection 4) for a monatomic ideal gas (γ = 5/3). The specific internal energy is e = 3
2c2 =
32kT/m.This approach can be generalized to deal with molecules with internal degrees of free-
dom and also to plasmas or partially ionized gases where there are various species ofparticle with different charges and masses. The equations of MHD can be derived byincluding the electromagnetic forces in Boltzmann’s equation.
2.9.3. Validity of a fluid approach
The essential idea here is that deviations from the Maxwellian distribution are smallwhen collisions are frequent compared to the characteristic time-scale of the flow. Inhigher-order approximations these deviations can be estimated, leading to the equationsof dissipative gas dynamics including transport effects (viscosity and heat conduction).The fluid approach breaks down if the mean flight time τ is not much less than the
characteristic time-scale of the flow, or if the mean free path λ ≈ cτ between collisionsis not much less than the characteristic length-scale of the flow. λ can be very long(measured in AU or pc) in very tenuous gases such as the interstellar medium, but maystill be smaller than the size of the system.Some typical order-of-magnitude estimates:Solar-type star: centre ρ ∼ 102 g cm−3, T ∼ 107K; photosphere ρ ∼ 10−7 g cm−3,
T ∼ 104K; corona ρ ∼ 10−15 g cm−3, T ∼ 106K.Interstellar medium: molecular clouds n ∼ 103 cm−3, T ∼ 10K; cold medium (neutral)
n ∼ 10 − 100 cm−3, T ∼ 102K; warm medium (neutral/ionized) n ∼ 0.1 − 1 cm−3,T ∼ 104K; hot medium (ionized) n ∼ 10−3 − 10−2 cm−3, T ∼ 106K.The Coulomb cross-section for ‘collisions’ (i.e. large-angle scatterings) between charged
particles (electrons or ions) is σ ≈ 1 × 10−4(T/K)−2 cm2. The mean free path is λ =1/(nσ).
Related examples (see Appendix A): A.1, A.2, A.3, A.4.
3. Ideal magnetohydrodynamics
3.1. Elementary derivation of the MHD equations
Magnetohydrodynamics (MHD) is the dynamics of an electrically conducting fluid (a fullyor partially ionized gas or a liquid metal) containing a magnetic field. It is a fusion offluid dynamics and electromagnetism.
3.1.1. Galilean electromagnetism
The equations of Newtonian gas dynamics are invariant under the Galilean transfor-mation to a frame of reference moving with uniform velocity v,
x′ = x− vt, t′ = t. (3.1)
Under this change of frame, the fluid velocity transforms according to
u′ = u− v, (3.2)
while scalar variables such as p, ρ and Φ are invariant. The Lagrangian time-derivativeD/Dt is also invariant, because the partial derivatives transform according to
∇′ = ∇,
∂
∂t′=
∂
∂t+ v · ∇. (3.3)

Astrophysical fluid dynamics 11
In Maxwell’s electromagnetic theory the electric and magnetic fields E and B aregoverned by the equations
∂B
∂t= −∇×E, ∇·B = 0, ∇×B = µ0
(
J + ǫ0∂E
∂t
)
, ∇·E =ρeǫ0, (3.4)
where µ0 and ǫ0 are the vacuum permeability and permittivity, J is the electric currentdensity and ρe is the electric charge density. (In these notes we use rationalized (e.g.SI) units for electromagnetism. In astrophysics it is also common to use Gaussian units,which are discussed in Appendix B.)It is well known that Maxwell’s equations are invariant under the Lorentz transforma-
tion of special relativity, with c = (µ0ǫ0)−1/2 being the speed of light. These equations
cannot be consistently coupled with those of Newtonian gas dynamics, which are invari-ant under the Galilean transformation. To derive a consistent Newtonian theory of MHD,valid for situations in which the fluid motions are slow compared to the speed of light,we must use Maxwell’s equations without the displacement current ǫ0 ∂E/∂t,
∂B
∂t= −∇×E, ∇ ·B = 0, ∇×B = µ0J . (3.5)
(We will not require the fourth Maxwell equation, involving ∇ · E, because the chargedensity will be found to be unimportant.) It is easily verified (exercise) that these pre-Maxwell equations† are indeed invariant under the Galilean transformation, providedthat the fields transform according to
E′ = E + v ×B, B′ = B, J ′ = J . (3.6)
These relations correspond to the limit of the Lorentz transformation for electromagneticfields‡ when |v| ≪ c and |E| ≪ c|B|.Under the pre-Maxwell theory, the equation of charge conservation takes the simplified
form ∇ · J = 0; this is analogous to the use of ∇ · u = 0 as the equation of massconservation in the incompressible (highly subsonic) limit of gas dynamics. The equationof energy conservation takes the simplified form
∂
∂t
(
B2
2µ0
)
+∇ ·
(
E ×B
µ0
)
= 0, (3.7)
in which the energy density, B2/2µ0, is purely magnetic (because |E| ≪ c|B|), while theenergy flux density has the usual form of the Poynting vector E ×B/µ0. We will verifythe self-consistency of the approximations made in Newtonian MHD in Section 3.1.4.
3.1.2. Induction equation
In the ideal MHD approximation we regard the fluid as a perfect electrical conductor.The electric field in the rest frame of the fluid therefore vanishes, implying that
E = −u×B (3.8)
in a frame in which the fluid velocity is u(x, t). This condition can be regarded as thelimit of a constitutive relation such as Ohm’s law, in which the effects of resistivity (i.e.finite conductivity) are neglected.
† It was by introducing the displacement current that Maxwell identified electromagneticwaves, so it is appropriate that a highly subluminal approximation should neglect this term.
‡ This was called the magnetic limit of Galilean electromagnetism byLe Bellac & Levy-Leblond (1973).

12 Gordon I. Ogilvie
From Maxwell’s equations, we then obtain the ideal induction equation,
∂B
∂t= ∇× (u×B). (3.9)
This is an evolutionary equation for B alone, E and J having been eliminated. Thedivergence of the induction equation,
∂
∂t(∇ ·B) = 0, (3.10)
ensures that the solenoidal character of B is preserved.
3.1.3. The Lorentz force
A fluid carrying a current density J in a magnetic field B experiences a bulk Lorentzforce
Fm = J ×B =1
µ0(∇×B)×B (3.11)
per unit volume. This can be understood as the sum of the Lorentz forces on individualparticles of charge q and velocity v,
∑
qv ×B =(
∑
qv)
×B. (3.12)
(The electrostatic force can be shown to be negligible in the limit relevant to NewtonianMHD; see Section 3.1.4.)In Cartesian coordinates
(µ0Fm)i = ǫijk
(
ǫjlm∂Bm
∂xl
)
Bk
=
(
∂Bi
∂xk− ∂Bk
∂xi
)
Bk
= Bk∂Bi
∂xk− ∂
∂xi
(
B2
2
)
.
(3.13)
Thus
Fm =1
µ0B · ∇B −∇
(
B2
2µ0
)
. (3.14)
The first term can be interpreted as a curvature force due to a magnetic tension Tm =B2/µ0 per unit area in the field lines; if the field is of constant magnitude then this termis equal to Tm times the curvature of the field lines, and is directed towards the centreof curvature. The second term is the gradient of an isotropic magnetic pressure
pm =B2
2µ0, (3.15)
which is also equal to the energy density of the magnetic field.The magnetic tension gives rise to Alfven waves† (see later), which travel parallel to
the magnetic field with characteristic speed
va =
(
Tmρ
)1/2
=B
(µ0ρ)1/2, (3.16)
† Hannes Olof Gosta Alfven (1908–1995), Swedish. Nobel Prize in Physics (1970) ‘for funda-mental work and discoveries in magnetohydro-dynamics with fruitful applications in differentparts of plasma physics’.

Astrophysical fluid dynamics 13
the Alfven speed. This is often considered as a vector Alfven velocity,
va =B
(µ0ρ)1/2. (3.17)
The magnetic pressure also affects the propagation of sound waves, which become mag-netoacoustic waves (or magnetosonic waves ; see later).The combination
Π = p+B2
2µ0(3.18)
is often referred to as the total pressure, while the ratio
β =p
B2/2µ0(3.19)
is known as the plasma beta.
3.1.4. Self-consistency of approximations
Three effects neglected in a Newtonian theory of MHD are (i) the displacement currentin Maxwell’s equations (compared to the electric current), (ii) the bulk electrostaticforce on the fluid (compared to the magnetic Lorentz force) and (iii) the electrostaticenergy (compared to the magnetic energy). We can verify the self-consistency of theseapproximations by using order-of-magnitude estimates or scaling relations. If the fluidflow has a characteristic length-scale L, time-scale T , velocity U ∼ L/T and magneticfield B, then the electric field can be estimated from equation (3.8) as E ∼ UB. Theelectric current density and charge density can be estimated from Maxwell’s equationsas J ∼ µ−1
0 B/L and ρe ∼ ǫ0E/L. Hence the ratios of the three neglected effects to theterms that are retained in Newtonian MHD can be estimated as follows:
ǫ0|∂E/∂t||J | ∼ ǫ0UB/T
µ−10 B/L
∼ U2
c2, (3.20)
|ρeE||J ×B| ∼
ǫ0E2/L
µ−10 B2/L
∼ U2
c2, (3.21)
ǫ0|E|2/2|B|2/2µ0
∼ U2
c2. (3.22)
Therefore Newtonian MHD corresponds to a consistent approximation of relativisticMHD for highly subluminal flows that is correct to the leading order in the small param-eter U2/c2.
3.1.5. Summary of the MHD equations
The full set of ideal MHD equations is
∂ρ
∂t+∇ · (ρu) = 0, (3.23)
ρDu
Dt= −ρ∇Φ−∇p+
1
µ0(∇ ×B)×B, (3.24)
Ds
Dt= 0, (3.25)
∂B
∂t= ∇× (u×B), (3.26)

14 Gordon I. Ogilvie
∇ ·B = 0, (3.27)
together with the equation of state, Poisson’s equation, etc., as required. Most of theseequations can be written in at least one other way that may be useful in different cir-cumstances.These equations display the essential nonlinearity of MHD. When the velocity field is
prescribed, an artifice known as the kinematic approximation, the induction equation isa relatively straightforward linear evolutionary equation for the magnetic field. However,a sufficiently strong magnetic field will modify the velocity field through its dynamicaleffect, the Lorentz force. This nonlinear coupling leads to a rich variety of behaviour. Ofcourse, the purely hydrodynamic nonlinearity of the u · ∇u term, which is responsiblefor much of the complexity of fluid dynamics, is still present.
3.2. Physical interpretation of MHD
There are two aspects to MHD: the advection of B by u (induction equation) and thedynamical back-reaction of B on u (Lorentz force).
3.2.1. Kinematics of the magnetic field
The ideal induction equation
∂B
∂t= ∇× (u×B) (3.28)
has a beautiful geometrical interpretation: the magnetic field lines are ‘frozen in’ to thefluid and can be identified with material curves. This is sometimes known as Alfven’stheorem.One way to show this result is to use the identity
∇× (u×B) = B · ∇u−B(∇ · u)− u · ∇B + u(∇ ·B) (3.29)
to write the induction equation in the form
DB
Dt= B · ∇u−B(∇ · u), (3.30)
and use the equation of mass conservation,
Dρ
Dt= −ρ∇ · u, (3.31)
to obtainD
Dt
(
B
ρ
)
=
(
B
ρ
)
· ∇u. (3.32)
This is exactly the same equation satisfied by a material line element δx (equation 2.3).Therefore a magnetic field line (an integral curve of B/ρ) is advected and distorted bythe fluid in the same way as a material curve.A complementary property is that the magnetic flux δΦ = B · δS through a material
surface element is conserved:
D δΦ
Dt=
DB
Dt· δS +B ·
D δS
Dt
=
(
Bj∂ui∂xj
−Bi∂uj∂xj
)
δSi +Bi
(
∂uj∂xj
δSi −∂uj∂xi
δSj
)
= 0.
(3.33)
By extension, we have conservation of the magnetic flux passing through any materialsurface.

Astrophysical fluid dynamics 15
Precisely the same equation as the ideal induction equation,
∂ω
∂t= ∇× (u× ω), (3.34)
is satisfied by the vorticity ω = ∇×u in homentropic or barotropic ideal fluid dynamicsin the absence of a magnetic field, in which case the vortex lines are ‘frozen in’ to thefluid (see Example A.2). The conserved quantity that is analogous to the magnetic fluxthrough a material surface is the flux of vorticity through that surface, which, by Stokes’stheorem, is equivalent to the circulation
∮
u · dx around the bounding curve. However,the fact that ω and u are directly related by the curl operation, whereas in MHD B andu are indirectly related through the equation of motion and the Lorentz force, meansthat the analogy between vorticity dynamics and MHD is limited in scope.
Related examples: A.5, A.6.
3.2.2. The Lorentz force
The Lorentz force per unit volume,
Fm =1
µ0B · ∇B −∇
(
B2
2µ0
)
, (3.35)
can also be written as the divergence of the Maxwell stress tensor :
Fm = ∇ ·M, M =1
µ0
(
BB − B2
2I
)
, (3.36)
where I is the identity tensor. (The electric part of the electromagnetic stress tensoris negligible in the limit relevant for Newtonian MHD, for the same reason that theelectrostatic energy is negligible.) In Cartesian coordinates
(Fm)i =∂Mji
∂xj, Mij =
1
µ0
(
BiBj −B2
2δij
)
. (3.37)
If the magnetic field is locally aligned with the x-axis, then
M =
Tm 0 00 0 00 0 0
−
pm 0 00 pm 00 0 pm
, (3.38)
showing the magnetic tension and pressure.Combining the ideas of magnetic tension and a frozen-in field leads to the picture
of field lines as elastic strings embedded in the fluid. Indeed there is a close analogybetween MHD and the dynamics of dilute solutions of long-chain polymer molecules.The magnetic field imparts elasticity to the fluid.
3.2.3. Differential rotation and torsional Alfven waves
We first consider the kinematic behaviour of a magnetic field in the presence of aprescribed velocity field involving differential rotation. In cylindrical polar coordinates(r, φ, z), let
u = rΩ(r, z) eφ. (3.39)
Consider an axisymmetric magnetic field, which we separate into poloidal (meridional: rand z) and toroidal (azimuthal: φ) parts:
B = Bp(r, z, t) +Bφ(r, z, t) eφ. (3.40)

16 Gordon I. Ogilvie
The ideal induction equation reduces to (exercise)
∂Bp
∂t= 0,
∂Bφ
∂t= rBp · ∇Ω. (3.41)
Differential rotation winds the poloidal field to generate a toroidal field. To obtain asteady state without winding, we require the angular velocity to be constant along eachmagnetic field line:
Bp · ∇Ω = 0, (3.42)
a result known as Ferraro’s law of isorotation†.There is an energetic cost to winding the field, as work is done against magnetic tension.
In a dynamical situation a strong magnetic field tends to enforce isorotation along itslength.We now generalize the analysis to allow for axisymmetric torsional oscillations :
u = rΩ(r, z, t) eφ. (3.43)
The azimuthal component of equation of motion is (exercise)
ρr∂Ω
∂t=
1
µ0rBp · ∇(rBφ). (3.44)
This combines with the induction equation to give
∂2Ω
∂t2=
1
µ0ρr2Bp · ∇(r2Bp · ∇Ω). (3.45)
This equation describes torsional Alfven waves. For example, if Bp = Bz ez is verticaland uniform, then
∂2Ω
∂t2= v2a
∂2Ω
∂z2. (3.46)
This is not strictly an exact nonlinear analysis because we have neglected the forcebalance (and indeed motion) in the meridional plane.
3.2.4. Force-free fields
In regions of low density, such as the solar corona, the magnetic field may be dy-namically dominant over the effects of inertia, gravity and gas pressure. Under thesecircumstances we have (approximately) a force-free magnetic field such that
(∇ ×B)×B = 0. (3.47)
Vector fields B satisfying this equation are known in a wider mathematical context asBeltrami fields. Since ∇×B must be parallel to B, we may write
∇×B = λB, (3.48)
for some scalar field λ(x). The divergence of this equation is
0 = B · ∇λ, (3.49)
so that λ is constant along each magnetic field line. In the special case λ = constant,known as a linear force-free magnetic field, the curl of equation (3.48) results in theHelmholtz equation
−∇2B = λ2B, (3.50)
† Vincenzo Ferraro (1902–1974), British.

Astrophysical fluid dynamics 17
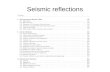
Figure 2. The Bessel functions J0(x) and J1(x) from the origin to the first zero of J1.
which admits a wide variety of non-trivial solutions.A subset of force-free magnetic fields consists of potential or current-free magnetic
fields for which
∇×B = 0. (3.51)
In a true vacuum, the magnetic field must be potential. However, only an extremely lowdensity of charge carriers (i.e. electrons) is needed to make the force-free description morerelevant.An example of a force-free field in cylindrical polar coordinates (r, φ, z) is
B = Bφ(r) eφ +Bz(r) ez,
∇×B = −dBz
dreφ +
1
r
d
dr(rBφ) ez .
(3.52)
Now ∇×B = λB implies
− 1
r
d
dr
(
rdBz
dr
)
= λ2Bz, (3.53)
which is the z component of the Helmholtz equation. The solution regular at r = 0 is
Bz = B0J0(λr), Bφ = B0J1(λr), (3.54)
where Jn is the Bessel function of order n (Figure 2). [Note that J0(x) satisfies (xJ′0)
′ +xJ0 = 0 and J1(x) = −J ′
0(x).] The helical nature of this field is typical of force-free fieldswith λ 6= 0.When applied to a infinite cylinder (e.g. as a simplified model of a magnetized astro-
physical jet), the solution could be extended from the axis to the first zero of J1 andthen matched to a uniform external axial field Bz. In this case the net axial current is

18 Gordon I. Ogilvie
Figure 3. A buoyant magnetic flux tube.
zero. Alternatively the solution could be extended from the axis to the first zero of J0and matched to an external azimuthal field Bφ ∝ r−1 generated by the net axial current.
3.2.5. Magnetostatic equilibrium and magnetic buoyancy
A magnetostatic equilibrium is a static solution (u = 0) of the equation of motion, i.e.one satisfying
0 = −ρ∇Φ−∇p+1
µ0(∇×B)×B, (3.55)
together with ∇ ·B = 0.While it is possible to find solutions in which the forces balance in this way, inhomo-
geneities in the magnetic field typically result in a lack of equilibrium. A magnetic fluxtube is an idealized situation in which the magnetic field is localized to the interior of atube and vanishes outside. To balance the total pressure at the interface, the gas pressuremust be lower inside. Unless the temperatures are different, the density is lower inside. Ina gravitational field the tube therefore experiences an upward buoyancy force and tendsto rise.
Related examples: A.7, A.8, A.9.
4. Conservation laws, symmetries and hyperbolic structure
4.1. Introduction
There are various ways in which a quantity can be said to be ‘conserved’ in fluid dynamicsor MHD. If a quantity has a density (amount per unit volume) q(x, t) that satisfies anequation of the conservative form
∂q
∂t+∇ · F = 0, (4.1)
then the vector field F (x, t) can be identified as the flux density (flux per unit area) of thequantity. The rate of change of the total amount of the quantity in a time-independentvolume V ,
Q =
∫
V
q dV, (4.2)
is then equal to minus the flux of F through the bounding surface S:
dQ
dt= −
∫
V
(∇ · F ) dV = −∫
S
F · dS. (4.3)

Astrophysical fluid dynamics 19
If the boundary conditions on S are such that this flux vanishes, then Q is constant;otherwise, changes in Q can be accounted for by the flux of F through S. In this sensethe quantity is said to be conserved. The prototype is mass, for which q = ρ and F = ρu.A material invariant is a scalar field f(x, t) for which
Df
Dt= 0, (4.4)
which implies that f is constant for each fluid element, and is therefore conserved fol-lowing the fluid motion. A simple example is the specific entropy in ideal fluid dynamics.When combined with mass conservation, this yields an equation in conservative form,
∂
∂t(ρf) +∇ · (ρfu) = 0. (4.5)
4.2. Synthesis of the total energy equation
Starting from the ideal MHD equations, we construct the total energy equation piece bypiece.Kinetic energy:
ρD
Dt(12u
2) = ρu ·Du
Dt= −ρu · ∇Φ− u · ∇p+
1
µ0u · [(∇×B)×B] . (4.6)
Gravitational energy (assuming initially that the system is non-self-gravitating and thatΦ is independent of t):
ρDΦ
Dt= ρu · ∇Φ. (4.7)
Internal (thermal) energy (using the fundamental thermodynamic identity de = T ds −p dv):
ρDe
Dt= ρT
Ds
Dt+ p
D ln ρ
Dt= −p∇ · u. (4.8)
Sum of these three:
ρD
Dt(12u
2 +Φ + e) = −∇ · (pu) +1
µ0u · [(∇ ×B)×B] . (4.9)
The last term can be rewritten as
1
µ0u · [(∇×B)×B] =
1
µ0(∇ ×B) · (−u×B) =
1
µ0(∇×B) ·E. (4.10)
Using mass conservation:
∂
∂t
[
ρ(12u2 +Φ + e)
]
+∇ ·[
ρu(12u2 +Φ + e) + pu
]
=1
µ0(∇×B) ·E. (4.11)
Magnetic energy:
∂
∂t
(
B2
2µ0
)
=1
µ0B ·
∂B
∂t= − 1
µ0B · ∇×E. (4.12)
Total energy:
∂
∂t
[
ρ(12u2 +Φ + e) +
B2
2µ0
]
+∇ ·
[
ρu(12u2 +Φ+ h) +
E ×B
µ0
]
= 0, (4.13)
where h = e+ p/ρ is the specific enthalpy and we have used the identity ∇ · (E×B) =B ·∇×E−E ·∇×B. Note that (E×B)/µ0 is the Poynting vector, the electromagneticenergy flux density. The total energy is therefore conserved.

20 Gordon I. Ogilvie
For a self-gravitating system satisfying Poisson’s equation, the gravitational energydensity can instead be regarded as −g2/8πG:
∂
∂t
(
− g2
8πG
)
= − 1
4πG∇Φ ·
∂∇Φ
∂t(4.14)
∂
∂t
(
− g2
8πG
)
+∇ ·
(
Φ
4πG
∂∇Φ
∂t
)
=Φ
4πG
∂∇2Φ
∂t= Φ
∂ρ
∂t= −Φ∇ · (ρu) (4.15)
∂
∂t
(
− g2
8πG
)
+∇ ·
(
ρuΦ+Φ
4πG
∂∇Φ
∂t
)
= ρu · ∇Φ. (4.16)
The total energy equation is then
∂
∂t
[
ρ(12u2 + e)− g2
8πG+B2
2µ0
]
+∇ ·
[
ρu(12u2 +Φ + h) +
Φ
4πG
∂∇Φ
∂t+
E ×B
µ0
]
= 0.
(4.17)It is important to note that some of the gravitational and magnetic energy of an astro-physical body is stored in the exterior region, even if the mass density vanishes there.
4.3. Other conservation laws in ideal MHD
In ideal fluid dynamics there are certain invariants with a geometrical or topologicalinterpretation. In homentropic or barotropic flow, for example, vorticity (or, equivalently,circulation) and kinetic helicity are conserved, while, in non-barotropic flow, potentialvorticity is conserved (see Example A.2). The Lorentz force breaks these conservationlaws because the curl of the Lorentz force per unit mass does not vanish in general.However, some new topological invariants associated with the magnetic field appear.The magnetic helicity in a volume V with bounding surface S is defined as
Hm =
∫
V
A ·B dV, (4.18)
where A is the magnetic vector potential, such that B = ∇×A. Now
∂A
∂t= −E −∇Φe = u×B −∇Φe, (4.19)
where Φe is the electrostatic potential. This can be thought of as the ‘uncurl’ of theinduction equation. Thus
∂
∂t(A ·B) = −B · ∇Φe +A · ∇× (u×B). (4.20)
In ideal MHD, therefore, magnetic helicity is conserved:
∂
∂t(A ·B) +∇ · [ΦeB +A× (u×B)] = 0. (4.21)
However, care is needed because A is not uniquely defined. Under a gauge transformationA 7→ A+∇χ, Φe 7→ Φe − ∂χ/∂t, where χ(x, t) is a scalar field, E and B are invariant,but Hm changes by an amount
∫
V
B · ∇χ dV =
∫
V
∇ · (χB) dV =
∫
S
χB · n dS. (4.22)
Therefore Hm is not uniquely defined unless B ·n = 0 on the surface S.Magnetic helicity is a pseudoscalar quantity: it changes sign under a reflection of the
spatial coordinates. Indeed, it is non-zero only when the magnetic field lacks reflectional

Astrophysical fluid dynamics 21
symmetry. It can also be interpreted topologically in terms of the twistedness and knot-tedness of the magnetic field (see Example A.10). Since the field is ‘frozen in’ to the fluidand deformed continuously by it, the topological properties of the field are conserved. Theequivalent conserved quantity in homentropic or barotropic ideal gas dynamics (withouta magnetic field) is the kinetic helicity
Hk =
∫
V
u · (∇ × u) dV. (4.23)
The cross-helicity in a volume V is
Hc =
∫
V
u ·B dV. (4.24)
It is helpful here to write the equation of motion in ideal MHD in the form
∂u
∂t+ (∇ × u)× u+∇(12u
2 +Φ+ h) = T∇s+1
µ0ρ(∇×B)×B, (4.25)
using the relation dh = T ds+ v dp. Thus
∂
∂t(u ·B) +∇ ·
[
u× (u×B) + (12u2 +Φ+ h)B
]
= TB · ∇s, (4.26)
and so cross-helicity is conserved in ideal MHD in homentropic or barotropic flow.Bernoulli’s theorem follows from the inner product of equation (4.25) with u. In steady
flow
u · ∇(12u2 +Φ + h) = 0, (4.27)
which implies that the Bernoulli function 12u
2+Φ+h is constant along streamlines, butonly if u · Fm = 0 (e.g. if u ‖B), i.e. if the magnetic field does no work on the flow.
Related examples: A.10, A.11.
4.4. Symmetries of the equations
The equations of ideal gas dynamics and MHD have numerous symmetries. In the caseof an isolated, self-gravitating system, these include:• Translations of time and space, and rotations of space: related (via Noether’s theo-
rem) to the conservation of energy, momentum and angular momentum.• Reversal of time: related to the absence of dissipation.• Reflections of space (but note that B is a pseudovector and behaves oppositely to u
under a reflection).• Galilean transformations.• Reversal of the sign of B.• Similarity transformations (exercise): if space and time are rescaled by independent
factors λ and µ, i.e.
x 7→ λx, t 7→ µ t, (4.28)
then
u 7→ λµ−1 u, ρ 7→ µ−2 ρ, p 7→ λ2µ−4 p, Φ 7→ λ2µ−2 Φ, B 7→ λµ−2 B. (4.29)
(This symmetry requires a perfect gas so that the thermodynamic relations are scale-free.)In the case of a non-isolated system with an external potential Φext, these symmetries
(other than B 7→ −B) apply only if Φext has them. However, in the approximation of a

22 Gordon I. Ogilvie
non-self-gravitating system, the mass can be rescaled by any factor λ such that
ρ 7→ λρ, p 7→ λ p, B 7→ λ1/2 B. (4.30)
(This symmetry also requires a perfect gas.)
4.5. Hyperbolic structure
Analysing the so-called hyperbolic structure of the equations of AFD is one way of un-derstanding the wave modes of the system and the way in which information propagatesin the fluid. It is fundamental to the construction of some types of numerical methodfor solving the equations. We temporarily neglect the gravitational force here, because ina Newtonian theory it involves instantaneous action at a distance and is not associatedwith a finite wave speed.In ideal gas dynamics, the equation of mass conservation, the thermal energy equation
and the equation of motion (omitting gravity) can be written as
∂ρ
∂t+ u · ∇ρ+ ρ∇ · u = 0,
∂p
∂t+ u · ∇p+ γp∇ · u = 0,
∂u
∂t+ u · ∇u+
1
ρ∇p = 0,
(4.31)
and then combined into the form
∂U
∂t+Ai
∂U
∂xi= 0, (4.32)
where
U =
ρpuxuyuz
(4.33)
is a five-dimensional ‘state vector’ and Ax, Ay and Az are the three 5× 5 matrices
ux 0 ρ 0 00 ux γp 0 00 1
ρ ux 0 0
0 0 0 ux 00 0 0 0 ux
,
uy 0 0 ρ 00 uy 0 γp 00 0 uy 0 00 1
ρ 0 uy 0
0 0 0 0 uy
,
uz 0 0 0 ρ0 uz 0 0 γp0 0 uz 0 00 0 0 uz 00 1
ρ 0 0 uz
.
(4.34)This works because every term in the equations involves a first derivative with respectto either time or space.The system of equations is said to be hyperbolic if the eigenvalues of Aini are real for
any unit vector n and if the eigenvectors span the five-dimensional space. As will be seenin Section 6.2, the eigenvalues can be identified as wave speeds, and the eigenvectors aswave modes, with n being the unit wavevector, locally normal to the wavefronts.Taking n = ex without loss of generality, we find (exercise)
det(Ax − vI) = −(v − ux)3[
(v − ux)2 − v2s
]
, (4.35)
where
vs =
(
γp
ρ
)1/2
(4.36)

Astrophysical fluid dynamics 23
is the adiabatic sound speed. The wave speeds v are real and the system is indeed hyper-bolic.
Two of the wave modes are sound waves (acoustic waves), which have wave speedsv = ux ± vs and therefore propagate at the sound speed relative to the moving fluid.Their eigenvectors are
ργp±vs00
(4.37)
and involve perturbations of density, pressure and longitudinal velocity.
The remaining three wave modes have wave speed v = ux and do not propagate relativeto the fluid. Their eigenvectors are
10000
,
00010
,
00001
. (4.38)
The first is the entropy wave, which involves only a density perturbation but no pressureperturbation. Since the entropy can be considered as a function of the density and pres-sure, this wave involves an entropy perturbation. It must therefore propagate at the fluidvelocity because the entropy is a material invariant. The other two modes with v = ux arevortical waves, which involve perturbations of the transverse velocity components, andtherefore of the vorticity. Conservation of vorticity implies that these waves propagatewith the fluid velocity.
To extend the analysis to ideal MHD, we may consider the induction equation in theform
∂B
∂t+ u · ∇B −B · ∇u+B(∇ · u) = 0, (4.39)
and include the Lorentz force in the equation of motion. Every new term involves afirst derivative. So the equation of mass conservation, the thermal energy equation, theequation of motion and the induction equation can be written in the combined form
∂U
∂t+Ai
∂U
∂xi= 0, (4.40)
where
U =
ρpuxuyuzBx
By
Bz
(4.41)

24 Gordon I. Ogilvie
is now an eight-dimensional ‘state vector’ and the Ai are three 8× 8 matrices, e.g.
Ax =
ux 0 ρ 0 0 0 0 00 ux γp 0 0 0 0 0
0 1ρ ux 0 0 0
By
µ0ρBz
µ0ρ
0 0 0 ux 0 0 − Bx
µ0ρ0
0 0 0 0 ux 0 0 − Bx
µ0ρ
0 0 0 0 0 ux 0 00 0 By −Bx 0 0 ux 00 0 Bz 0 −Bx 0 0 ux
. (4.42)
We now find, after some algebra,
det(Ax − vI) = (v − ux)2[
(v − ux)2 − v2ax
] [
(v − ux)4 − (v2s + v2a)(v − ux)
2 + v2s v2ax
]
.(4.43)
The wave speeds v are real and the system is indeed hyperbolic. The various MHD wavemodes will be examined later (Section 5).In this representation, there are two modes that have v = ux and do not propagate
relative to the fluid. One is still the entropy wave, which is physical and involves onlya density perturbation. The other is the ‘divB’ mode, which is unphysical and involvesa perturbation of ∇ · B (i.e. of Bx, in the case n = ex). This must be eliminated byimposing the constraint ∇ ·B = 0. (In fact the equations in the form we have writtenthem imply that (∇·B)/ρ is a material invariant and could be non-zero unless the initialcondition ∇ ·B = 0 is imposed.) The vortical waves are replaced by Alfven waves withspeeds ux ± vax.
4.6. Stress tensor and virial theorem
In the absence of external forces, the equation of motion of a fluid can usually be writtenin the form
ρDu
Dt= ∇ ·T or ρ
DuiDt
=∂Tji∂xj
, (4.44)
where T is the stress tensor, a symmetric second-rank tensor field. Using the equation ofmass conservation, we can relate this to the conservative form of the momentum equation,
∂
∂t(ρu) +∇ · (ρuu−T) = 0, (4.45)
which shows that −T is the momentum flux density excluding the advective flux ofmomentum.For a self-gravitating system in ideal MHD, the stress tensor is
T = −p I− 1
4πG
(
gg − 12g
2 I)
+1
µ0
(
BB − 12B
2 I)
, (4.46)
or, in Cartesian components,
Tij = −p δij −1
4πG
(
gigj − 12g
2 δij)
+1
µ0
(
BiBj − 12B
2 δij)
. (4.47)
We have already identified the Maxwell stress tensor associated with the magnetic field.The idea of a gravitational stress tensor works for a self-gravitating system in which thegravitational field g = −∇Φ and the density ρ are related through Poisson’s equation−∇ · g = ∇2Φ = 4πGρ. In fact, for a general vector field v, it can be shown that

Astrophysical fluid dynamics 25
(exercise)
∇ · (vv − 12v
2 I) = (∇ · v)v + v · ∇v −∇(12v2) = (∇ · v)v + (∇× v)× v. (4.48)
In the magnetic case (v = B) the first term in the final expression vanishes, while in thegravitational case (v = g) the second term vanishes, leaving −4πGρg, which becomesthe force per unit volume, ρg, when divided by −4πG.The virial equations are the spatial moments of the equation of motion, and provide
integral measures of the balance of forces acting on the fluid. The first moments aregenerally the most useful. Consider
ρD2
Dt2(xixj) = ρ
D
Dt(uixj + xiuj) = 2ρuiuj + xj
∂Tki∂xk
+ xi∂Tkj∂xk
. (4.49)
Integrate this equation over a material volume V bounded by a surface S (with materialinvariant mass element dm = ρ dV ):
d2
dt2
∫
V
xixj dm =
∫
V
(
2ρuiuj + xj∂Tki∂xk
+ xi∂Tkj∂xk
)
dV
=
∫
V
(2ρuiuj − Tji − Tij) dV +
∫
S
(xjTki + xiTkj)nk dS,
(4.50)
where we have integrated by parts using the divergence theorem. In the case of an isolatedsystem with no external sources of gravity or magnetic field, g decays proportional to|x|−2 at large distance, and B decays faster. Therefore Tij decays proportional to |x|−4
and the surface integral can be eliminated if we let V occupy the whole of space. Wethen obtain (after division by 2) the tensor virial theorem
1
2
d2Iijdt2
= 2Kij − Tij , (4.51)
where
Iij =
∫
xixj dm (4.52)
is related to the inertia tensor of the system,
Kij =
∫
12uiuj dm (4.53)
is a kinetic energy tensor and
Tij =∫
Tij dV (4.54)
is the integrated stress tensor. (If the conditions above are not satisfied, there will be anadditional contribution from the surface integral.)The scalar virial theorem is the trace of this expression, which we write as
1
2
d2I
dt2= 2K − T . (4.55)
Note that K is the total kinetic energy. Now
− T =
∫ (
3p− g2
8πG+B2
2µ0
)
dV = 3(γ − 1)U +W +M, (4.56)
for a perfect gas with no external gravitational field, where U , W and M are the total

26 Gordon I. Ogilvie
internal, gravitational and magnetic energies. Thus
1
2
d2I
dt2= 2K + 3(γ − 1)U +W +M. (4.57)
On the right-hand side, only W is negative. For the system to be bound (i.e. not flyapart) the kinetic, internal and magnetic energies are limited by
2K + 3(γ − 1)U +M 6 |W |. (4.58)
In fact equality must hold, at least on average, unless the system is collapsing or con-tracting.The tensor virial theorem provides more specific information relating to the energies as-
sociated with individual directions, and is particularly relevant in cases where anisotropyis introduced by rotation or a magnetic field. It has been used in estimating the condi-tions required for gravitational collapse in molecular clouds. A higher-order tensor virialmethod was used by Chandrasekhar and Lebovitz to study the equilibrium and stabilityof rotating ellipsoidal bodies (Chandrasekhar 1969).
5. Linear waves in homogeneous media
In ideal MHD the density, pressure and magnetic field evolve according to
∂ρ
∂t= −u · ∇ρ− ρ∇ · u,
∂p
∂t= −u · ∇p− γp∇ · u,
∂B
∂t= ∇× (u×B).
(5.1)
Consider a magnetostatic equilibrium in which the density, pressure and magnetic fieldare ρ0(x), p0(x) and B0(x). The above equations are exactly satisfied in this basic statebecause u = 0 and the time-derivatives vanish. Now consider small perturbations fromequilibrium, such that ρ(x, t) = ρ0(x) + δρ(x, t) with |δρ| ≪ ρ0, etc. The linearizedequations are
∂ δρ
∂t= −δu · ∇ρ0 − ρ0∇ · δu,
∂ δp
∂t= −δu · ∇p0 − γp0∇ · δu,
∂ δB
∂t= ∇× (δu×B0).
(5.2)
By introducing the displacement ξ(x, t) such that δu = ∂ξ/∂t, we can integrate theseequations to obtain
δρ = −ξ · ∇ρ− ρ∇ · ξ,
δp = −ξ · ∇p− γp∇ · ξ,
δB = ∇× (ξ ×B)
= B · ∇ξ −B(∇ · ξ)− ξ · ∇B.
(5.3)
We have now dropped the subscript ‘0’ without danger of confusion.(The above relations allow some freedom to add arbitrary functions of x. At least
when studying wavelike solutions in which all variables have the same harmonic time-dependence, such additional terms can be discarded.)

Astrophysical fluid dynamics 27
The linearized equation of motion is
ρ∂2ξ
∂t2= −ρ∇δΦ− δρ∇Φ−∇δΠ+
1
µ0(δB · ∇B +B · ∇δB), (5.4)
where the perturbation of total pressure is
δΠ = δp+B · δB
µ0= −ξ · ∇Π−
(
γp+B2
µ0
)
∇ · ξ +1
µ0B · (B · ∇ξ). (5.5)
The gravitational potential perturbation satisfies the linearized Poisson equation
∇2δΦ = 4πGδρ. (5.6)
We consider a basic state of uniform density, pressure and magnetic field, in the absenceof gravity. Such a system is homogeneous but anisotropic, because the uniform fielddistinguishes a particular direction. The problem simplifies to
ρ∂2ξ
∂t2= −∇δΠ+
1
µ0B · ∇ [B · ∇ξ −B(∇ · ξ)] , (5.7)
with
δΠ = −(
γp+B2
µ0
)
∇ · ξ +1
µ0B · (B · ∇ξ). (5.8)
Owing to the symmetries of the basic state, plane-wave solutions exist, of the form
ξ(x, t) = Re[
ξ exp(ik · x− iωt)]
, (5.9)
where ω and k are the frequency and wavevector, and ξ is a constant vector representingthe amplitude of the wave. For such solutions, equation (5.7) gives
ρω2ξ =
[(
γp+B2
µ0
)
k · ξ − 1
µ0(k ·B)B · ξ
]
k+1
µ0(k·B) [(k ·B)ξ −B(k · ξ)] , (5.10)
where we have changed the sign and omitted the tilde.For transverse displacements that are orthogonal to both the wavevector and the mag-
netic field, i.e. k · ξ = B · ξ = 0, this equation simplifies to
ρω2ξ =1
µ0(k ·B)2ξ. (5.11)
Such solutions are called Alfven waves. Their dispersion relation is
ω2 = (k · va)2. (5.12)
Given the dispersion relation ω(k) of any wave mode, the phase and group velocitiesof the wave can be identified as
vp =ω
kk, vg =
∂ω
∂k= ∇kω, (5.13)
where k = k/k. The phase velocity is that with which the phase of the wave travels, whilethe group velocity is that which the energy of the wave (or the centre of a wavepacket)is transported.For Alfven waves, therefore,
vp = ±va cos θ k, vg = ±va, (5.14)
where θ is the angle between k and B.

28 Gordon I. Ogilvie
To find the other solutions, we take the inner product of equation (5.10) with k andthen with B to obtain first
ρω2k · ξ =
[(
γp+B2
µ0
)
k · ξ − 1
µ0(k ·B)B · ξ
]
k2 (5.15)
and then
ρω2B · ξ = γp(k · ξ)k ·B. (5.16)
These equations can be written in the form[
ρω2 −(
γp+ B2
µ0
)
k2 1µ0(k ·B)k2
−γp(k ·B) ρω2
]
[
k · ξ
B · ξ
]
=
[
00
]
. (5.17)
The ‘trivial solution’ k · ξ = B · ξ = 0 corresponds to the Alfven wave that we havealready identified. The other solutions satisfy
ρω2
[
ρω2 −(
γp+B2
µ0
)
k2]
+ γpk21
µ0(k ·B)2 = 0, (5.18)
which simplifies to
v4p − (v2s + v2a)v2p + v2s v
2a cos
2 θ = 0. (5.19)
The two solutions
v2p = 12 (v
2s + v2a)±
[
14 (v
2s + v2a)
2 − v2s v2a cos
2 θ]1/2
(5.20)
are called fast and slow magnetoacoustic (or magnetosonic) waves, respectively.In the special case θ = 0 (k‖B), we have
v2p = v2s or v2a , (5.21)
together with v2p = v2a for the Alfven wave. Note that the fast wave could be eitherv2p = v2s or v2p = v2a , whichever is greater.In the special case θ = π/2 (k ⊥ B), we have
v2p = v2s + v2a or 0, (5.22)
together with v2p = 0 for the Alfven wave.The effects of the magnetic field on wave propagation can be understood as resulting
from the two aspects of the Lorentz force. The magnetic tension gives rise to Alfvenwaves, which are similar to waves on an elastic string, and are trivial in the absence ofthe magnetic field. In addition, the magnetic pressure affects the response of the fluid tocompression, and therefore modifies the propagation of acoustic waves.The phase and group velocity for the full range of θ are usually exhibited in Friedrichs
diagrams† (Figure 4), which are polar plots of vp(θ) and vg(θ).We can interpret:• the fast wave as a quasi-isotropic acoustic-type wave in which both gas and magnetic
pressure contribute;• the slow wave as an acoustic-type wave that is strongly guided by the magnetic field;• the Alfven wave as analogous to a wave on an elastic string, propagating by means
of magnetic tension and perfectly guided by the magnetic field.
Related example: A.12.
† Kurt Otto Friedrichs (1901–1982), German–American.

Astrophysical fluid dynamics 29
Figure 4. Polar plots of the phase velocity (left) and group velocity (right) of MHD waves forthe cases va = 0.7 vs (top) and vs = 0.7 va (bottom) with a magnetic field in the horizontaldirection. [The group velocity plot for the Alfven wave consists of the two points (±va, 0).]
6. Nonlinear waves, shocks and other discontinuities
6.1. One-dimensional gas dynamics
6.1.1. Riemann’s analysis
The equations of mass conservation and motion in one dimension are
∂ρ
∂t+ u
∂ρ
∂x= −ρ∂u
∂x,
∂u
∂t+ u
∂u
∂x= −1
ρ
∂p
∂x.
(6.1)
We assume the gas is homentropic (s = constant) and perfect. (This eliminates theentropy wave and leaves only the two sound waves.) Then p ∝ ργ and v2s = γp/ρ ∝ ργ−1.It is convenient to use vs as a variable in place of ρ or p:
dp = v2s dρ, dρ =ρ
vs
(
2 dvsγ − 1
)
. (6.2)

30 Gordon I. Ogilvie
Figure 5. Characteristic curves in the space-time diagram.
Then
∂u
∂t+ u
∂u
∂x+ vs
∂
∂x
(
2vsγ − 1
)
= 0,
∂
∂t
(
2vsγ − 1
)
+ u∂
∂x
(
2vsγ − 1
)
+ vs∂u
∂x= 0.
(6.3)
We add and subtract to obtain[
∂
∂t+ (u+ vs)
∂
∂x
](
u+2vsγ − 1
)
= 0, (6.4)
[
∂
∂t+ (u− vs)
∂
∂x
](
u− 2vsγ − 1
)
= 0. (6.5)
Define the two Riemann invariants
R± = u± 2vsγ − 1
. (6.6)
Then we deduce that R± = constant along a characteristic (curve) of gradient dx/dt =u± vs in the (x, t) plane. The + and − characteristics form an interlocking web coveringthe space-time diagram (Figure 5).Note that both Riemann invariants are needed to reconstruct the solution (u and vs).
Half of the information is propagated along one set of characteristics and half along theother.In general the characteristics are not known in advance but must be determined along
with the solution. The + and − characteristics propagate at the speed of sound to theright and left, respectively, with respect to the motion of the fluid.This concept generalizes to nonlinear waves the solution of the classical wave equation

Astrophysical fluid dynamics 31
Figure 6. Domains of dependence and of influence.
for acoustic waves on a uniform and static background, which is of the form f(x− vst)+g(x+ vst).
6.1.2. Method of characteristics
A numerical method of solution can be based on the following idea:• Start with the initial data (u and vs) for all relevant x at t = 0.• Determine the characteristic slopes at t = 0.• Propagate the R± information for a small increment of time, neglecting the variation
of the characteristic slopes.• Combine the R± information to find u and vs at each x at the new value of t.• Re-evaluate the slopes and repeat.The domain of dependence of a point P in the space-time diagram is that region of the
diagram bounded by the ± characteristics through P and located in the past of P . Thesolution at P cannot depend on anything that occurs outside the domain of dependence.Similarly, the domain of influence of P is the region in the future of P bounded by thecharacteristics through P (Figure 6).
6.1.3. A simple wave
Suppose that R− is uniform, having the same constant value on every characteristicemanating from an undisturbed region to the right. Its value everywhere is that of theundisturbed region:
u− 2vsγ − 1
= u0 −2vs0γ − 1
. (6.7)
Then, along the + characteristics, both R+ and R−, and therefore u and vs, must beconstant. The + characteristics therefore have constant slope v = u + vs, so they arestraight lines.

32 Gordon I. Ogilvie
Figure 7. Formation of a shock from intersecting characteristics.
The statement that the wave speed v is constant on the family of straight lines dx/dt =v is expressed by the equation
∂v
∂t+ v
∂v
∂x= 0. (6.8)
This is known as the inviscid Burgers equation† or the nonlinear advection equation.The inviscid Burgers equation has only one set of characteristics, with slope dx/dt = v.
It is easily solved by the method of characteristics. The initial data define v0(x) = v(x, 0)and the characteristics are straight lines. In regions where dv0/dx > 0 the characteristicsdiverge in the future. In regions where dv0/dx < 0 the characteristics converge and willform a shock at some point. Contradictory information arrives at the same point in thespace-time diagram, leading to a breakdown of the solution (Figure 7).Another viewpoint is that of wave steepening. The graph of v versus x evolves in time
by moving each point at its wave speed v. The crest of the wave moves fastest andeventually overtakes the trough to the right of it. The profile would become multiple-valued, but this is physically meaningless and the wave breaks, forming a discontinuity(Figure 8).Indeed, the formal solution of the inviscid Burgers equation is
v(x, t) = v0(x0) with x = x0 + v0(x0)t. (6.9)
By the chain rule, ∂v/∂x = v′0/(1 + v′0t), which diverges first at the breaking timet = 1/max(−v′0).The crest of a sound wave moves faster than the trough for two reasons. It is partly
because the crest is denser and hotter, so the sound speed is higher (unless the gas isisothermal), but it is also because of the self-advection of the wave (recall that the wave
† Johannes (Jan) Martinus Burgers (1895–1981), Dutch.

Astrophysical fluid dynamics 33
Figure 8. Wave steepening and shock formation. The dotted profile is multiple-valued and isreplaced in practice with a discontinuous profile including a shock.
speed is u + vs). The breaking time depends on the amplitude and wavelength of thewave.
6.2. General analysis of simple nonlinear waves
Recall the hyperbolic structure of the equations of AFD (Section 4.5):
∂U
∂t+Ai
∂U
∂xi= 0, U = [ρ, p,u,B]T. (6.10)
The system is hyperbolic because the eigenvalues of Aini are real for any unit vectorni. The eigenvalues are identified as wave speeds, and the corresponding eigenvectors aswave modes.In a simple wave propagating in the x-direction, all physical quantities are functions
of a single variable, the phase ϕ(x, t). Then U = U(ϕ) and so
dU
dϕ
∂ϕ
∂t+Ax
dU
dϕ
∂ϕ
∂x= 0. (6.11)
This equation is satisfied if dU/dϕ is an eigenvector of the hyperbolic system and if
∂ϕ
∂t+ v
∂ϕ
∂x= 0, (6.12)
where v is the corresponding wavespeed. But since v = v(ϕ) we again find
∂v
∂t+ v
∂v
∂x= 0, (6.13)
the inviscid Burgers equation.Wave steepening is therefore generic for simple waves. However, waves do not always

34 Gordon I. Ogilvie
Figure 9. A shock front in its rest frame.
steepen in practice. For example, linear dispersion arising from Coriolis or buoyancyforces (see Section 11) can counteract nonlinear wave steepening. Waves propagating ona non-uniform background are not simple waves. In addition, waves may be damped bydiffusive processes (viscosity, thermal conduction or resistivity) before they can steepen.Furthermore, even some simple waves do not undergo steepening, in spite of the above
argument. This happens if the wave speed v does not depend on the variables thatactually vary in the wave mode. One example is the entropy wave in hydrodynamics, inwhich the density varies but not the pressure or the velocity. The wave speed is the fluidvelocity, which does not vary in this wave; therefore the relevant solution of the inviscidBurgers equation is just v = constant. Another example is the Alfven wave, which involvesvariations in transverse velocity and magnetic field components, but whose speed dependson the longitudinal components and the density. The slow and fast magnetoacousticwaves, though, are ‘genuinely nonlinear’ and undergo steepening.
6.3. Shocks and other discontinuities
6.3.1. Jump conditions
Discontinuities are resolved in reality by diffusive processes (viscosity, thermal conduc-tion or resistivity) that become more important on smaller length-scales. Properly, weshould solve an enhanced set of equations to resolve the internal structure of a shock.This internal solution would then be matched on to the external solution in which diffu-sion can be neglected. However, the matching conditions can in fact be determined fromgeneral principles without resolving the internal structure.Without loss of generality, we consider a shock front at rest at x = 0 (making a Galilean
transformation if necessary). We look for a stationary, one-dimensional solution in whichgas flows from left to right. On the left is upstream, pre-shock material (ρ1, p1, etc.). Onthe right is downstream, post-shock material (ρ2, p2, etc.) (Figure 9).Consider any equation in conservative form
∂q
∂t+∇ · F = 0. (6.14)
For a stationary solution in one dimension,
dFx
dx= 0, (6.15)
which implies that the flux density Fx has the same value on each side of the shock. Wewrite the matching condition as
[Fx]21 = Fx2 − Fx1 = 0. (6.16)

Astrophysical fluid dynamics 35
Including additional physics means that additional diffusive fluxes (not of mass but ofmomentum, energy, magnetic flux, etc.) are present. These fluxes are negligible outsidethe shock, so they do not affect the jump conditions. This approach is permissible pro-vided that the new physics does not introduce any source terms in the equations. So thetotal energy is a properly conserved quantity but not the entropy (see later).From mass conservation:
[ρux]21 = 0. (6.17)
From momentum conservation:[
ρu2x +Π− B2x
µ0
]2
1
= 0, (6.18)
[
ρuxuy −BxBy
µ0
]2
1
= 0, (6.19)
[
ρuxuz −BxBz
µ0
]2
1
= 0. (6.20)
From ∇ ·B = 0:
[Bx]21 = 0. (6.21)
From ∂B/∂t+∇×E = 0:
[uxBy − uyBx]21 = −[Ez]
21 = 0, (6.22)
[uxBz − uzBx]21 = [Ey]
21 = 0. (6.23)
(These are the standard electromagnetic conditions at an interface: the normal compo-nent of B and the parallel components of E are continuous.) From total energy conser-vation:
[
ρux(12u
2 + h) +1
µ0(EyBz − EzBy)
]2
1
= 0. (6.24)
Note that the conservative form of the momentum equation used above is (cf. equa-tion 4.45)
∂
∂t(ρui) +∇ ·
(
ρuiu+Πei −BiB
µ0
)
= 0. (6.25)
Including gravity makes no difference to the shock relations because Φ is always contin-uous (it satisfies ∇2Φ = 4πGρ).Although the entropy in ideal MHD satisfies an equation of conservative form,
∂
∂t(ρs) +∇ · (ρsu) = 0, (6.26)
the dissipation of energy within the shock provides a source term for entropy. Thereforethe entropy flux is not continuous across the shock.
6.3.2. Non-magnetic shocks
First consider a normal shock (uy = uz = 0) with no magnetic field. We obtain theRankine–Hugionot relations†
[ρux]21 = 0, [ρu2x + p]21 = 0, [ρux(
12u
2x + h)]21 = 0. (6.27)
† William John Macquorn Rankine (1820–1872), British. Pierre-Henri Hugoniot (1851–1887),French.

36 Gordon I. Ogilvie
The specific enthalpy of a perfect gas is
h =
(
γ
γ − 1
)
p
ρ(6.28)
and these equations can be solved algebraically (see Example A.13). Introduce the up-stream Mach number (the shock Mach number)
M1 =ux1vs1
> 0. (6.29)
Then we find
ρ2ρ1
=ux1ux2
=(γ + 1)M2
1
(γ − 1)M21 + 2
,p2p1
=2γM2
1 − (γ − 1)
(γ + 1), (6.30)
and
M22 =
2 + (γ − 1)M21
2γM21 − (γ − 1)
. (6.31)
Note that ρ2/ρ1 and p2/p1 are increasing functions of M1. The case M1 = 1 is trivialas it corresponds to ρ2/ρ1 = p2/p1 = 1. The other two cases are the compression shock(M1 > 1, M2 < 1, ρ2 > ρ1, p2 > p1) and the rarefaction shock (M1 < 1, M2 > 1,ρ2 < ρ1, p2 < p1).It is shown in Example A.13 that the entropy change in passing through the shock is
positive for compression shocks and negative for rarefaction shocks. Therefore only com-pression shocks are physically realizable. Rarefaction shocks are excluded by the secondlaw of thermodynamics. All shocks involve dissipation and irreversibility.The fact that M1 > 1 while M2 < 1 means that the shock travels supersonically
relative to the upstream gas and subsonically relative to the downstream gas.In the weak shock limit M1 − 1 ≪ 1 the relative velocity of the fluid and the shock is
close to the sound speed on both sides.In the strong shock limit M1 ≫ 1, common in astrophysical applications, we have
ρ2ρ1
=ux1ux2
→ γ + 1
γ − 1,
p2p1
≫ 1, M22 → γ − 1
2γ. (6.32)
Note that the compression ratio ρ2/ρ1 is finite (and equal to 4 when γ = 5/3). In the restframe of the undisturbed (upstream) gas the shock speed is ush = −ux1. The downstreamdensity, velocity (in that frame) and pressure in the limit of a strong shock are (as willbe used in Section 7)
ρ2 =
(
γ + 1
γ − 1
)
ρ1, ux2 − ux1 =2ushγ + 1
, p2 =2ρ1u
2sh
γ + 1. (6.33)
A significant amount of thermal energy is generated out of kinetic energy by the passageof a strong shock:
e2 =2u2sh
(γ + 1)2. (6.34)
6.3.3. Oblique shocks
When uy or uz is non-zero, we have the additional relations
[ρuxuy]21 = [ρuxuz]
21 = 0. (6.35)
Since ρux is continuous across the shock (and non-zero), we deduce that [uy]21 = [uz]
21 =
0. Momentum and energy conservation apply as before, and we recover the Rankine–Hugoniot relations. (See Example A.14.)

Astrophysical fluid dynamics 37
6.3.4. Other discontinuities
The discontinuity is not called a shock if there is no normal flow (ux = 0). In this casewe can deduce only that [p]21 = 0. Arbitrary discontinuities are allowed in ρ, uy and uz.These are related to the entropy and vortical waves. If there is a jump in ρ we have acontact discontinuity. If there is a jump in uy or uz we have a tangential discontinuityor vortex sheet (the vorticity being proportional to δ(x)). Note that these discontinuitiesare not produced naturally by wave steepening, because the entropy and vortical wavesdo not steepen. However they do appear in the Riemann problem (Section 6.3.6) andother situations with discontinuous initial conditions.
6.3.5. MHD shocks and discontinuities
When a magnetic field is included, the jump conditions allow a wider variety of solu-tions. There are different types of discontinuity associated with the three MHD waves(Alfven, slow and fast), which we will not discuss here. Since the parallel components ofB need not be continuous, it is possible for them to ‘switch on’ or ‘switch off’ on passagethrough a shock.A current sheet is a tangential discontinuity in the magnetic field. A classic case would
be where By, say, changes sign across the interface, with Bx = 0. The current density isthen proportional to δ(x).
6.3.6. The Riemann problem
The Riemann problem is a fundamental initial-value problem for a hyperbolic systemand plays a central role in some numerical methods for solving the equations of AFD.The initial condition at t = 0 consists of two uniform states separated by a discontinuity
at x = 0. In the case of one-dimensional gas dynamics, we have
ρ =
ρL, x < 0
ρR, x > 0, p =
pL, x < 0
pR, x > 0, ux =
uL, x < 0
uR, x > 0, (6.36)
where ‘L’ and ‘R’ denote the left and right states. A simple example is a ‘shock tube’problem in which gas at different pressures is at rest on either side of a partition, whichis released at t = 0.It can be shown that the initial discontinuity resolves generically into three simple
waves. The inner one is a contact discontinuity while the outer ones are shocks or rar-efaction waves (see below).The initial data define no natural length-scale for the Riemann problem, but they do
allow a characteristic velocity scale c to be defined (although not uniquely). The result isa similarity solution in which variables depend on x and t only through the dimensionlesscombination ξ = x/ct.Unlike the unphysical rarefaction shock, the rarefaction wave (or expansion wave) is
a non-dissipative, homentropic, continuous simple wave in which ∇ · u > 0. If we seeka similarity solution v = v(ξ) of the inviscid Burgers equation vt + vvx = 0 we findv = x/t (or the trivial solution v = constant). The characteristics form an expansion fan(Figure 10).The ‘+’ rarefaction wave has u+vs = x/t and R− = u− 2
γ−1vs = constant, determined
by the undisturbed right-hand state. The ‘−’ rarefaction wave has u − vs = x/t andR+ = u+ 2
γ−1vs = constant, determined by the undisturbed left-hand state. In each case
u and vs are linear functions of x/t and ∇ · u = 2γ+1 t
−1 > 0.
A typical outcome of a shock-tube problem consists of (from left to right): undisturbed

38 Gordon I. Ogilvie
Figure 10. Expansion fan of characteristics in a rarefaction wave.
Figure 11. Typical outcome of a shock-tube problem. The two uniform regions are separatedby a contact discontinuity. The other discontinuity is a shock.
region, rarefaction wave, uniform region, contact discontinuity, uniform region, shock,undisturbed region (Figure 11).
In Godunov’s method and related computational algorithms, the equations of AFDare advanced in time by solving (either exactly or approximately) a Riemann problemat each cell boundary.
Related examples: A.13, A.14, A.15, A.16.

Astrophysical fluid dynamics 39
7. Spherical blast waves: supernovae
Note: in this section (r, θ, φ) are spherical polar coordinates.
7.1. Introduction
In a supernova, an energy of order 1051 erg (1044 J) is released into the interstellarmedium. An expanding spherical blast wave is formed as the explosion sweeps up thesurrounding gas. Several good examples of these supernova remnants are observed in theGalaxy, e.g. Tycho’s supernova of 1572 and Kepler’s supernova of 1604†.The effect is similar to a bomb. When photographs‡ (complete with length and time
scales) were released of the first atomic bomb test in New Mexico in 1945, both Sedov¶in the Soviet Union and Taylor‖ in the UK were able to work out the energy of the bomb(equivalent to about 20 kilotons of TNT), which was supposed to be a secret.
We suppose that an energy E is released at t = 0, r = 0 and that the explosionis spherically symmetric. The external medium has density ρ0 and pressure p0. In theSedov–Taylor phase of the explosion, the pressure p≫ p0. Then a strong shock is formedand the external pressure p0 can be neglected (formally set to zero). Gravity is alsonegligible in the dynamics.
7.2. Governing equations
The equations governing the spherically symmetric flow of a perfect gas, with radialvelocity ur = u(r, t), may be written as
(
∂
∂t+ u
∂
∂r
)
ρ = − ρ
r2∂
∂r(r2u),
(
∂
∂t+ u
∂
∂r
)
u = −1
ρ
∂p
∂r,
(
∂
∂t+ u
∂
∂r
)
ln(pρ−γ) = 0.
(7.1)
These imply the total energy equation
∂
∂t
(
1
2ρu2 +
p
γ − 1
)
+1
r2∂
∂r
[
r2(
1
2ρu2 +
γp
γ − 1
)
u
]
= 0. (7.2)
The shock is at r = R(t), and the shock speed is R. The equations are to be solved in0 < r < R with the strong shock conditions (6.33) at r = R:
ρ =
(
γ + 1
γ − 1
)
ρ0, u =2R
γ + 1, p =
2ρ0R2
γ + 1. (7.3)
The total energy of the explosion is
E =
∫ R
0
(
1
2ρu2 +
p
γ − 1
)
4πr2 dr = constant, (7.4)
the thermal energy of the external medium being negligible.
† See http://en.wikipedia.org/wiki/Supernova remnant‡ See http://www.atomicarchive.com/Photos/Trinity
¶ Leonid Ivanovitch Sedov (1907–1999), Russian.‖ Sir Geoffrey Ingram Taylor (1886–1975), British.

40 Gordon I. Ogilvie
7.3. Dimensional analysis
The dimensional parameters of the problem on which the solution might depend are Eand ρ0. Their dimensions are
[E] =ML2T−2, [ρ0] =ML−3. (7.5)
Together, they do not define a characteristic length-scale, so the explosion is ‘scale-free’ or‘self-similar’. If the dimensional analysis includes the time t since the explosion, however,we can find a time-dependent characteristic length-scale. The radius of the shock mustbe
R = α
(
Et2
ρ0
)1/5
, (7.6)
where α is a dimensionless constant to be determined.
7.4. Similarity solution
The self-similarity of the explosion is expressed using the dimensionless similarity variableξ = r/R(t). The solution has the form
ρ = ρ0 ρ(ξ), u = R u(ξ), p = ρ0R2 p(ξ), (7.7)
where ρ(ξ), u(ξ) and p(ξ) are dimensionless functions to be determined. The meaning ofthis type of solution is that the graph of u versus r, for example, has a constant shapebut both axes of the graph are rescaled as time proceeds and the shock expands.
7.5. Dimensionless equations
We substitute these forms into equations (7.1) and cancel the dimensional factors toobtain
(u− ξ)ρ′ = − ρ
ξ2d
dξ(ξ2u),
(u− ξ)u′ − 3
2u = − p
′
ρ,
(u− ξ)
(
p′
p− γρ′
ρ
)
− 3 = 0.
(7.8)
Similarly, the strong shock conditions are that
ρ =γ + 1
γ − 1, u =
2
γ + 1, p =
2
γ + 1(7.9)
at ξ = 1, while the total energy integral provides a normalization condition,
1 =16π
25α5
∫ 1
0
(
1
2ρu2 +
p
γ − 1
)
ξ2 dξ, (7.10)
that will ultimately determine the value of α.
7.6. First integral
The one-dimensional conservative form of the total energy equation (7.2) is
∂q
∂t+∂F
∂r= 0, (7.11)
where
q = r2(
1
2ρu2 +
p
γ − 1
)
, F = r2(
1
2ρu2 +
γp
γ − 1
)
u. (7.12)

Astrophysical fluid dynamics 41
In dimensionless form,
q = ρ0R2R2 q(ξ), F = ρ0R
2R3 F (ξ), (7.13)
with
q = ξ2(
1
2ρu2 +
p
γ − 1
)
, F = ξ2(
1
2ρu2 +
γp
γ − 1
)
u. (7.14)
We substitute the forms (7.13) into the energy equation (7.11) to find
− ξq′ − q + F ′ = 0, (7.15)
which implies
d
dξ(F − ξq) = 0. (7.16)
Thus
F − ξq = constant = 0 (7.17)
for a solution that is finite at ξ = 0. This equation can be solved for p:
p =(γ − 1)ρu2(ξ − u)
2(γu− ξ). (7.18)
Note that this solution is compatible with the shock boundary conditions. Having founda first integral, we can now dispense with (e.g.) the thermal energy equation.Let u = vξ. We now have
(v − 1)d ln ρ
d ln ξ= − dv
d ln ξ− 3v, (7.19)
(v − 1)dv
d ln ξ+
1
ρξ2d
d ln ξ
[
(γ − 1)ρξ2v2(1− v)
2(γv − 1)
]
=3
2v. (7.20)
Eliminate ρ:
dv
d ln ξ=
v(γv − 1)[5− (3γ − 1)v]
γ(γ + 1)v2 − 2(γ + 1)v + 2. (7.21)
Invert and split into partial fractions:
d ln ξ
dv= − 2
5v+
γ(γ − 1)
(2γ + 1)(γv − 1)+
13γ2 − 7γ + 12
5(2γ + 1)[5− (3γ − 1)v]. (7.22)
The solution is
ξ ∝ v−2/5(γv − 1)(γ−1)/(2γ+1)[5− (3γ − 1)v]−(13γ2−7γ+12)/5(2γ+1)(3γ−1). (7.23)
Now
d ln ρ
dv= − 1
v − 1− 3v
v − 1
d ln ξ
dv
=2
(2− γ)(1− v)+
3γ
(2γ + 1)(γv − 1)− 13γ2 − 7γ + 12
(2 − γ)(2γ + 1)[5− (3γ − 1)v].
(7.24)
The solution is
ρ ∝ (1 − v)−2/(2−γ)(γv − 1)3/(2γ+1)[5− (3γ − 1)v](13γ2−7γ+12)/(2−γ)(2γ+1)(3γ−1). (7.25)
For example, in the case γ = 5/3:
ξ ∝ v−2/5
(
5v
3− 1
)2/13
(5 − 4v)−82/195, (7.26)

42 Gordon I. Ogilvie
Figure 12. Sedov’s solution for a spherical blast wave in the case γ = 5/3.
ρ ∝ (1− v)−6
(
5v
3− 1
)9/13
(5− 4v)82/13. (7.27)
To satisfy v = 2/(γ + 1) = 3/4 and ρ = (γ + 1)/(γ − 1) = 4 at ξ = 1:
ξ =
(
4v
3
)−2/5(20v
3− 4
)2/13(5
2− 2v
)−82/195
, (7.28)
ρ = 4 (4− 4v)−6
(
20v
3− 4
)9/13(5
2− 2v
)82/13
. (7.29)
Then, from the first integral,
p =3
4
(
4v
3
)6/5
(4− 4v)−5
(
5
2− 2v
)82/15
. (7.30)
In this solution (Figure 12), ξ ranges from 0 to 1, and v from 3/5 to 3/4. The normalizationintegral (numerically) yields α ≈ 1.152.
7.7. Applications
Some rough estimates are as follows:• For a supernova: E ∼ 1051 erg, ρ0 ∼ 10−24 g cm−3. Then R ≈ 6 pc and R ≈
2000 kms−1 at t = 1000 yr.• For the 1945 New Mexico explosion: E ≈ 8× 1020 erg, ρ0 ≈ 1.2× 10−3 g cm−3. Then
R ≈ 100m and R ≈ 4 kms−1 at t = 0.01 s.The similarity method is useful in a very wide range of nonlinear problems. In this
case it reduced partial differential equations to integrable ordinary differential equations.
Related example: A.17.

Astrophysical fluid dynamics 43
8. Spherically symmetric steady flows: stellar winds and accretion
Note: in this section (r, θ, φ) are spherical polar coordinates.
8.1. Introduction
Many stars, including the Sun, lose mass through a stellar wind. The gas must be suf-ficiently hot to escape from the star’s gravitational field. Gravitating bodies can alsoaccrete gas from the interstellar medium. The simplest models of these processes neglectthe effects of rotation or magnetic fields and involve a steady, spherically symmetric flow.
8.2. Basic equations
We consider a purely radial flow, either away from or towards a body of mass M . Thegas is perfect and non-self-gravitating, so Φ = −GM/r. The fluid variables are functionsof r only, and the only velocity component is ur = u(r).Mass conservation for such a flow implies that the mass flux
4πr2ρu = −M = constant. (8.1)
If u > 0 (a stellar wind), −M is the mass-loss rate. If u < 0 (an accretion flow), M is themass accretion rate. We ignore the secular change in the massM , which would otherwiseviolate the steady nature of the flow.The thermal energy equation (assuming u 6= 0) implies homentropic flow:
p = Kργ , K = constant. (8.2)
The equation of motion has only one component:
ρudu
dr= −ρdΦ
dr− dp
dr. (8.3)
Alternatively, we can use the integral form (Bernoulli’s equation):
12u
2 +Φ+ h = B = constant, h =
(
γ
γ − 1
)
p
ρ=
v2sγ − 1
. (8.4)
In highly subsonic flow the 12u
2 term on the left-hand side of Bernoulli’s equation isnegligible and the gas is quasi-hydrostatic. In highly supersonic flow the h term is neg-ligible and the flow is quasi-ballistic (freely falling). As discussed below, we are usuallyinterested in transonic solutions that pass smoothly from subsonic to supersonic flow.Our aim is to solve for u(r), and to determine M if possible. At what rate does a star
lose mass through a wind, or a black hole accrete mass from the surrounding medium?
8.3. First treatment
We first use the differential form of the equation of motion. Rewrite the pressure gradientusing the other two equations:
− dp
dr= −pd ln p
dr= −γpd ln ρ
dr= ρv2s
(
2
r+
1
u
du
dr
)
. (8.5)
Equation (8.3), multiplied by u/ρ, becomes
(u2 − v2s )du
dr= u
(
2v2sr
− dΦ
dr
)
. (8.6)
A critical point (sonic point) occurs at any radius r = rs where |u| = vs. For the flow topass smoothly from subsonic to supersonic, the right-hand side must vanish at the sonic

44 Gordon I. Ogilvie
point:
2v2ssrs
− GM
r2s= 0. (8.7)
Evaluate Bernoulli’s equation (8.4) at the sonic point:(
1
2+
1
γ − 1
)
v2ss −GM
rs= B. (8.8)
We deduce that
v2ss =2(γ − 1)
(5− 3γ)B, rs =
(5 − 3γ)
4(γ − 1)
GM
B. (8.9)
There is a unique transonic solution, which exists only for 1 6 γ < 5/3. (The case γ = 1can be treated separately or by taking a limit.)Now evaluate M at the sonic point:
|M | = 4πr2s ρsvss. (8.10)
8.4. Second treatment
We now use Bernoulli’s equation instead of the equation of motion.Introduce the local Mach number M = |u|/vs. Then
4πr2ρvsM = |M |, v2s = γKργ−1. (8.11)
Eliminate ρ to obtain
vs = (γK)1/(γ+1)
(
|M |4πr2M
)(γ−1)/(γ+1)
. (8.12)
Bernoulli’s equation (8.4) is
12v
2sM2 − GM
r+
v2sγ − 1
= B. (8.13)
Substitute for vs and separate the variables:
(γK)2/(γ+1)
(
|M |4π
)2(γ−1)/(γ+1)[M4/(γ+1)
2+
M−2(γ−1)/(γ+1)
γ − 1
]
= Br4(γ−1)/(γ+1) +GMr−(5−3γ)/(γ+1).
(8.14)
This equation is of the form f(M) = g(r). Assume that 1 < γ < 5/3 and B > 0. (IfB < 0 then the flow cannot reach infinity.) Then each of f and g is the sum of a positivepower and a negative power, with positive coefficients. f(M) has a minimum at M = 1,while g(r) has a minimum at
r =(5− 3γ)
4(γ − 1)
GM
B, (8.15)
which is the sonic radius rs identified previously. A smooth passage through the sonicpoint is possible only if |M | has a special value, so that the minima of f and g areequal. If |M | is too large then the solution does not work for all r. If it is too small thenthe solution remains subsonic (or supersonic) for all r, which may not agree with theboundary conditions (Figure 13).The (r,M) plane shows an X-type critical point at (rs, 1) (Figure 14).For r ≪ rs the subsonic solution is close to a hydrostatic atmosphere. The supersonic
solution is close to free fall.

Astrophysical fluid dynamics 45
Figure 13. Shapes of the functions f(M) and g(r) for the case γ = 4/3. Only if M is equal tothe critical value at which the minima of f and g coincide (solid line, left panel) does a smoothtransonic solution exist.
Figure 14. Solution curves for a stellar wind or accretion flow in the case γ = 4/3, showing anX-type critical point at the sonic radius and at Mach number M = 1.
For r ≫ rs the subsonic solution approaches a uniform state (p = constant, ρ =constant). The supersonic solution is close to u = constant (so ρ ∝ r−2).

46 Gordon I. Ogilvie
8.5. Stellar wind
For a stellar wind the appropriate solution is subsonic (quasi-hydrostatic) at small r andsupersonic (coasting) at large r. Parker (1958)† first presented this simplified model forthe solar wind. The mass-loss rate can be determined from the properties of the quasi-hydrostatic part of the solution, e.g. the density and temperature at the base of the solarcorona. A completely hydrostatic solution is unacceptable unless the external medium canprovide a significant non-zero pressure. Subsonic solutions with |M | less than the criticalvalue are usually unacceptable for similar reasons. (In fact the interstellar medium doesarrest the supersonic solar wind in a termination shock well beyond Pluto’s orbit.)
8.6. Accretion
In spherical or Bondi (1952)‡ accretion we consider a gas that is uniform and at rest atinfinity (with pressure p0 and density ρ0). Then B = v2s0/(γ− 1) and v2ss = 2v2s0/(5− 3γ).The appropriate solution is subsonic (uniform) at large r and supersonic (freely falling)at small r. If the accreting object has a dense surface (a star rather than a black hole)then the accretion flow will be arrested by a shock above the surface.The accretion rate of the critical solution is
M = 4πr2s ρsvss = 4πr2s ρ0vs0
(
vssvs0
)(γ+1)/(γ−1)
= f(γ)MB, (8.16)
where
MB =πG2M2ρ0
v3s0= 4πr2aρ0vs0 (8.17)
is the characteristic Bondi accretion rate and
f(γ) =
(
2
5− 3γ
)(5−3γ)/2(γ−1)
(8.18)
is a dimensionless factor. Here
ra =GM
2v2s0(8.19)
is the nominal accretion radius, roughly the radius within which the mass M capturesthe surrounding medium into a supersonic inflow.Exercise: show that
limγ→1
f(γ) = e3/2, limγ→5/3
f(γ) = 1. (8.20)
(However, although the case γ = 1 admits a sonic point, the important case γ = 5/3does not.)At different times in its life a star may gain mass from, or lose mass to, its environment.
Currently the Sun is losing mass at an average rate of about 2×10−14M⊙ yr−1. If it werenot doing so, it could theoretically accrete at the Bondi rate of about 3× 10−15M⊙ yr−1
from the interstellar medium.
Related examples: A.17, A.18, A.19.
† Eugene Newman Parker (1927–), American.‡ Sir Hermann Bondi (1919–2005), Austrian–British.

Astrophysical fluid dynamics 47
Figure 15. Magnetic flux function and poloidal magnetic field.
9. Axisymmetric rotating magnetized flows: astrophysical jets
Note: in this section (r, φ, z) are cylindrical polar coordinates.
9.1. Introduction
Stellar winds and jets from accretion discs are examples of outflows in which rotationand magnetic fields have important or essential roles. Using cylindrical polar coordinates(r, φ, z), we examine steady (∂/∂t = 0), axisymmetric (∂/∂φ = 0) models based on theequations of ideal MHD.
9.2. Representation of an axisymmetric magnetic field
The solenoidal condition for an axisymmetric magnetic field is
1
r
∂
∂r(rBr) +
∂Bz
∂z= 0. (9.1)
We may write
Br = −1
r
∂ψ
∂z, Bz =
1
r
∂ψ
∂r, (9.2)
where ψ(r, z) is the magnetic flux function (Figure 15). This is related to the magneticvector potential by ψ = rAφ. The magnetic flux contained inside the circle (r = constant,z = constant) is
∫ r
0
Bz(r′, z) 2πr′ dr′ = 2πψ(r, z), (9.3)
plus an arbitrary constant that can be set to zero.Since B · ∇ψ = 0, ψ labels the magnetic field lines or their surfaces of revolution,

48 Gordon I. Ogilvie
known as magnetic surfaces. The magnetic field may be written in the form
B = ∇ψ×∇φ+Bφ eφ =
[
− 1
reφ ×∇ψ
]
+
[
Bφ eφ
]
. (9.4)
The two square brackets represent the poloidal (meridional) and toroidal (azimuthal)parts of the magnetic field:
B = Bp +Bφ eφ. (9.5)
Note that
∇ ·B = ∇ ·Bp = 0. (9.6)
Similarly, one can write the velocity in the form
u = up + uφ eφ, (9.7)
although ∇ · up 6= 0 in general.
9.3. Mass loading and angular velocity
The steady induction equation in ideal MHD,
∇× (u×B) = 0, (9.8)
implies
u×B = −E = ∇Φe, (9.9)
where Φe is the electrostatic potential. Now
u×B = (up + uφ eφ)× (Bp +Bφ eφ)
=
[
eφ × (uφBp −Bφup)
]
+
[
up ×Bp
]
.(9.10)
For an axisymmetric solution with ∂Φe/∂φ = 0, we have
up ×Bp = 0, (9.11)
i.e. the poloidal velocity is parallel to the poloidal magnetic field.† Let
ρup = kBp, (9.12)
where k is the mass loading, i.e. the ratio of mass flux to magnetic flux.The steady equation of mass conservation is
0 = ∇ · (ρu) = ∇ · (ρup) = ∇ · (kBp) = Bp · ∇k. (9.13)
Therefore
k = k(ψ), (9.14)
i.e. k is a surface function, constant on each magnetic surface.We now have
u×B = eφ × (uφBp −Bφup) =
(
uφr
− kBφ
rρ
)
∇ψ. (9.15)
† It is possible to consider a more general situation in which rEφ is equal to a non-zero con-stant. In this case there is a steady drift across the field lines and a steady transport of poloidalmagnetic flux. However, such a possibility is best considered in the context of non-ideal MHD,which allows both advective and diffusive transport of magnetic flux and angular momentum.

Astrophysical fluid dynamics 49
Taking the curl of this equation, we find
0 = ∇
(
uφr
− kBφ
rρ
)
×∇ψ. (9.16)
Thereforeuφr
− kBφ
rρ= ω, (9.17)
where ω(ψ) is another surface function, known as the angular velocity of the magneticsurface.The complete velocity field may be written in the form
u =kB
ρ+ rω eφ, (9.18)
i.e. the total velocity is parallel to the total magnetic field in a frame of reference rotatingwith angular velocity ω. It is useful to think of the fluid being constrained to move alongthe field line like a bead on a rotating wire.
9.4. Entropy
The steady thermal energy equation,
u · ∇s = 0, (9.19)
implies that Bp · ∇s = 0 and so
s = s(ψ) (9.20)
is another surface function.
9.5. Angular momentum
The azimuthal component of the equation of motion is
ρ(
up · ∇uφ +uruφr
)
=1
µ0
(
Bp · ∇Bφ +BrBφ
r
)
1
rρup · ∇(ruφ)−
1
µ0rBp · ∇(rBφ) = 0
1
rBp · ∇
(
kruφ − rBφ
µ0
)
= 0,
(9.21)
and so
ruφ =rBφ
µ0k+ ℓ, (9.22)
where
ℓ = ℓ(ψ) (9.23)
is another surface function, the angular momentum invariant. This is the angular mo-mentum removed in the outflow per unit mass, although part of the torque is carried bythe magnetic field.
9.6. The Alfven surface
Define the poloidal Alfven number (cf. the Mach number)
A =upvap
. (9.24)

50 Gordon I. Ogilvie
Then
A2 =µ0ρu
2p
B2p
=µ0k
2
ρ, (9.25)
and so A ∝ ρ−1/2 on each magnetic surface.Consider the two equations
uφr
=kBφ
rρ+ ω, ruφ =
rBφ
µ0k+ ℓ. (9.26)
Eliminate Bφ to obtain
uφ =r2ω −A2ℓ
r(1 −A2)=
(
1
1−A2
)
rω +
(
A2
A2 − 1
)
ℓ
r. (9.27)
For A≪ 1 we have
uφ ≈ rω, (9.28)
i.e. the fluid is in uniform rotation, corotating with the magnetic surface. For A≫ 1 wehave
uφ ≈ ℓ
r, (9.29)
i.e. the fluid conserves its specific angular momentum. The point r = ra(ψ) where A = 1is the Alfven point. The locus of Alfven points for different magnetic surfaces forms theAlfven surface. To avoid a singularity there we require
ℓ = r2aω. (9.30)
Typically the outflow will start at low velocity in high-density material, where A≪ 1.We can therefore identify ω as the angular velocity uφ/r = Ω0 of the footpoint r = r0of the magnetic field line at the source of the outflow. It will then accelerate smoothlythrough an Alfven surface and become super-Alfvenic (A > 1). If mass is lost at arate M in the outflow, angular momentum is lost at a rate Mℓ = Mr2aΩ0. In contrast,in a hydrodynamic outflow, angular momentum is conserved by fluid elements and istherefore lost at a rate Mr20Ω0. A highly efficient removal of angular momentum occursif the Alfven radius is large compared to the footpoint radius. This effect is the magneticlever arm. The loss of angular momentum through a stellar wind is called magneticbraking (Figure 16). In the case of the Sun, the Alfven radius is approximately between20 and 30R⊙.
9.7. The Bernoulli function
The total energy equation for a steady flow is
∇ ·
[
ρu(12u2 +Φ+ h) +
E ×B
µ0
]
= 0. (9.31)
Now since
u =kB
ρ+ rω eφ, (9.32)
we have
E = −u×B = −rω eφ ×B = −rω eφ ×Bp, (9.33)
which is purely poloidal. Thus
(E ×B)p = E × (Bφ eφ) = −rωBφBp. (9.34)

Astrophysical fluid dynamics 51
Figure 16. Acceleration through an Alfven point along a poloidal magnetic field line, leadingto angular-momentum loss and magnetic braking.
The total energy equation is therefore
∇ ·
[
kBp(12u
2 +Φ + h)− rωBφ
µ0Bp
]
= 0
Bp · ∇
[
k
(
12u
2 +Φ+ h− rωBφ
µ0k
)]
= 0
12u
2 +Φ+ h− rωBφ
µ0k= ε,
(9.35)
where
ε = ε(ψ) (9.36)
is another surface function, the energy invariant.An alternative invariant is
ε = ε− ℓω
= 12u
2 +Φ+ h− rωBφ
µ0k−(
ruφ − rBφ
µ0k
)
ω
= 12u
2 +Φ+ h− ruφω
= 12u
2p +
12 (uφ − rω)2 +Φcg + h,
(9.37)
where
Φcg = Φ− 12ω
2r2 (9.38)
is the centrifugal–gravitational potential associated with the magnetic surface. One canthen see that ε is the Bernoulli function of the flow in the frame rotating with angular

52 Gordon I. Ogilvie
velocity ω. In this frame the flow is strictly parallel to the magnetic field and the fieldtherefore does no work because J ×B ⊥ B and so J ×B ⊥ (u− rω eφ).
9.8. Summary
We have been able to integrate almost all of the MHD equations, reducing them to aset of algebraic relations on each magnetic surface. If the poloidal magnetic field Bp
(or, equivalently, the flux function ψ) is specified in advance, these algebraic equationsare sufficient to determine the complete solution on each magnetic surface separately,although we must also (i) specify the initial conditions at the source of the outflow and(ii) ensure that the solution passes smoothly through critical points where the flow speedmatches the speeds of slow and fast magnetoacoustic waves (see Example A.21).The component of the equation of motion perpendicular to the magnetic surfaces is
the only piece of information not yet used. This ‘transfield’ or ‘Grad–Shafranov’ equa-tion ultimately determines the equilibrium shape of the magnetic surfaces. It is a verycomplicated nonlinear partial differential equation for ψ(r, z) and cannot be reduced tosimple terms. We do not consider it here.
9.9. Acceleration from the surface of an accretion disc
We now consider the launching of an outflow from a thin accretion disc. The angularvelocity Ω(r) of the disc corresponds approximately to circular Keplerian orbital motionaround a central mass M :
Ω ≈(
GM
r3
)1/2
(9.39)
If the flow starts essentially from rest in high-density material (A≪ 1), we have
ω ≈ Ω, (9.40)
i.e. the angular velocity of the magnetic surface is the angular velocity of the disc at thefootpoint of the field line. In the sub-Alfvenic region we have
ε ≈ 12u
2p +Φcg + h. (9.41)
As in the case of stellar winds, if the gas is hot (comparable to the escape temperature)an outflow can be driven by thermal pressure. Of more interest here is the possibility of adynamically driven outflow. For a ‘cold’ wind the enthalpy makes a negligible contributionin this equation. Whether the flow accelerates or not above the disc then depends on thevariation of the centrifugal–gravitational potential along the field line.Consider a Keplerian disc in a point-mass potential. Let the footpoint of the field line
be at r = r0, and let the angular velocity of the field line be
ω = Ω0 =
(
GM
r30
)1/2
, (9.42)
as argued above. Then
Φcg = −GM(r2 + z2)−1/2 − 1
2
GM
r30r2. (9.43)
In units such that r0 = 1, the equation of the equipotential passing through thefootpoint (r0, z) is
(r2 + z2)−1/2 +r2
2=
3
2. (9.44)

Astrophysical fluid dynamics 53
Figure 17. Contours of Φcg , in units such that r0 = 1. The downhill directions are indicatedby dotted contours. If the inclination of the poloidal magnetic field to the vertical direction atthe surface of the disc exceeds 30, gas is accelerated along the field lines away from the disc.
This can be rearranged into the form
z2 =(2− r)(r − 1)2(r + 1)2(r + 2)
(3− r2)2. (9.45)
Close to the footpoint (1, 0) we have
z2 ≈ 3(r − 1)2 ⇒ z ≈ ±√3(r − 1). (9.46)
The footpoint lies at a saddle point of Φcg (Figure 17). If the inclination of the field lineto the vertical, i, at the surface of the disc exceeds 30, the flow is accelerated withoutthermal assistance.† This is magnetocentrifugal acceleration.The critical equipotential has an asymptote at r = r0
√3. The field line must continue
to expand sufficiently in the radial direction in order to sustain the magnetocentrifugalacceleration.
9.10. Magnetically driven accretion
To allow a quantity of mass ∆Macc to be accreted from radius r0, its orbital angular mo-mentum r20Ω0 ∆Macc must be removed. The angular momentum removed by a quantityof mass ∆Mjet flowing out in a magnetized jet from radius r0 is ℓ∆Mjet = r2aΩ0 ∆Mjet.
† A more detailed investigation (Ogilvie & Livio 1998) shows that the Keplerian rotation ofthe disc is modified by the Lorentz force. There is then a potential barrier ∝ B4 to be overcomeby the outflow, even when i > 30, which means that some thermal assistance is required,especially when the disc is strongly magnetized.

54 Gordon I. Ogilvie
Therefore accretion can in principle be driven by an outflow, with
Macc
Mjet
≈ r2ar20. (9.47)
The magnetic lever arm allows an efficient removal of angular momentum if the Alfvenradius is large compared to the footpoint radius.
Related examples: A.20, A.21.
10. Lagrangian formulation of ideal MHD
10.1. The Lagrangian viewpoint
In Section 11 we will discuss waves and instabilities in differentially rotating astrophysicalbodies. Here we develop a general theory of disturbances to fluid flows that makes use ofthe conserved quantities in ideal fluids and take a Lagrangian approach.The flow of a fluid can be considered as a time-dependent map,
a 7→ x(a, t), (10.1)
where a is the position vector of a fluid element at some initial time t0, and x is its positionvector at time t. The Cartesian components of a are examples of Lagrangian variables,labelling the fluid element. The components of x are Eulerian variables, labelling a fixedpoint in space. Any fluid property X (scalar, vector or tensor) can be regarded as afunction of either Lagrangian or Eulerian variables:
X = XL(a, t) = XE(x, t). (10.2)
The Lagrangian time-derivative is simply
D
Dt=
(
∂
∂t
)
a
, (10.3)
and the velocity of the fluid is
u =Dx
Dt=
(
∂x
∂t
)
a
. (10.4)
The aim of a Lagrangian formulation of ideal MHD is to derive a nonlinear evolutionaryequation for the function x(a, t). The dynamics is Hamiltonian in character and can bederived from a Lagrangian function or action principle. There are many similarities withclassical field theories.
10.2. The deformation tensor
Introduce the deformation tensor of the flow,
Fij =∂xi∂aj
, (10.5)
and its determinant
F = det(Fij) (10.6)
and inverse
Gij =∂ai∂xj
. (10.7)

Astrophysical fluid dynamics 55
We note the following properties. First, the derivative
∂F
∂Fij= Cij = FGji =
1
2ǫikℓǫjmnFkmFℓn (10.8)
is equal to the cofactor Cij of the matrix element Fij . (This follows from the fact that thedeterminant can be expanded as the sum of the products of any row’s elements with theircofactors, which do not depend on that row’s elements.) Second, the matrix of cofactorshas zero divergence on its second index:
∂Cij
∂aj=
∂
∂aj
(
1
2ǫikℓǫjmn
∂xk∂am
∂xℓ∂an
)
= 0. (10.9)
(This follows because the resulting derivative involves the contraction of the antisym-metric tensor ǫjmn with expressions that are symmetric in either jm or jn.)Now
DFij
Dt=∂ui∂aj
(10.10)
and, according to equation (10.8),
D lnF
Dt= Gji
DFij
Dt=∂aj∂xi
∂ui∂aj
=∂ui∂xi
= ∇ · u. (10.11)
10.3. Geometrical conservation laws
The equations of ideal MHD comprise the equation of motion and three ‘geometrical’conservation laws. These are the conservation of specific entropy (thermal energy equa-tion),
Ds
Dt= 0, (10.12)
the conservation of mass,
Dρ
Dt= −ρ∇ · u, (10.13)
and the conservation of magnetic flux (induction equation),
D
Dt
(
B
ρ
)
=
(
B
ρ
)
· ∇u. (10.14)
These equations describe the pure advection of fluid properties in a manner equivalent tothe advection of various geometrical objects. The specific entropy is advected as a simplescalar, so that its numerical value is conserved by material points. The specific volumev = 1/ρ is advected in the same way as a material volume element dV . The quantityB/ρ is advected in the same way as a material line element δx. Equivalently, the masselement δm = ρ δV and the magnetic flux element δΦ = B · δS satisfy D δm/Dt = 0 andD δΦ/Dt = 0, where δS is a material surface element. All three conservation laws can beintegrated exactly in Lagrangian variables.The exact solutions of equations (10.12), (10.13) and (10.14) are then
sL(a, t) = s0(a), ρL(a, t) = F−1ρ0(a), BLi (a, t) = F−1FijBj0(a), (10.15)
where s0, ρ0, and B0 are the initial values at time t0. The verification of equation (10.14)is
D
Dt
(
Bi
ρ
)
=D
Dt
(
FijBj0
ρ0
)
=∂ui∂aj
Bj0
ρ0=∂ui∂xk
FkjBj0
ρ0=
(
Bk
ρ
)
∂ui∂xk
. (10.16)
Note that the advected quantities at time t depend only on the initial values and on the

56 Gordon I. Ogilvie
instantaneous mapping a 7→ x, not on the intermediate history of the flow. The ‘memory’of an ideal fluid is perfect.
10.4. The Lagrangian of ideal MHD
Newtonian dynamics can be formulated using Hamilton’s principle of stationary action,
δ
∫
L dt = 0, (10.17)
where the Lagrangian L is the difference between the kinetic energy and the potentialenergy of the system. By analogy, we may expect the Lagrangian of ideal MHD to takethe form
L =
∫
LdV (10.18)
where (for a non-self-gravitating fluid)
L = ρ
(
12u
2 − Φ− e− B2
2µ0ρ
)
(10.19)
is the Lagrangian density.To verify this, we assume that the equation of state can be written in the form e =
e(v, s), where v = ρ−1 is the specific volume. Since de = T ds− p dv, we have(
∂e
∂v
)
s
= −p,(
∂2e
∂v2
)
s
=γp
v(10.20)
(strictly, γ should be Γ1 here).We then write the action using Lagrangian variables,
S[x] =
∫∫
L(x,u,F) d3a dt, (10.21)
with
L = ρ0
[
1
2u2 − Φ(x)− e(Fρ−1
0 , s0)−F−1FijBj0FikBk0
2µ0ρ0
]
. (10.22)
This uses the fact that F is the Jacobian determinant of the transformation a 7→ x, or,equivalently, that ρ d3x = ρ0 d
3a = dm is an invariant mass measure. L is now expressedin terms of the function x(a, t) and its derivatives with respect to time (u) and space(F). The Euler–Lagrange equation for the variational principle δS = 0 is
D
Dt
∂L∂ui
+∂
∂aj
∂L∂Fij
− ∂L∂xi
= 0. (10.23)
The straightforward terms are
∂L∂ui
= ρ0ui,∂L∂xi
= −ρ0∂Φ
∂xi. (10.24)
Now
∂L∂Fij
=
(
p+B2
2µ0
)
∂F
∂Fij− F−1Bj0FikBk0
µ0
= Cij
(
p+B2
2µ0
)
− 1
µ0CkjBiBk
= −CkjVik,
(10.25)

Astrophysical fluid dynamics 57
where
Vik = −(
p+B2
2µ0
)
δik +BiBk
µ0(10.26)
is the stress tensor due to pressure and the magnetic field.
The Euler–Lagrange equation is therefore
ρ0DuiDt
= −ρ0∂Φ
∂xi+
∂
∂aj(CkjVik). (10.27)
Using equation (10.9) we note that
∂
∂aj(CkjVik) = Ckj
∂Vik∂aj
= FGjk∂Vik∂aj
= F∂Vik∂xk
. (10.28)
On dividing through by F , the Euler–Lagrange equation becomes the desired equationof motion,
ρDu
Dt= −ρ∇Φ+∇ ·V. (10.29)
In this construction, the fluid flow is viewed as a field x(a, t) on the initial statespace. Ideal MHD is seen as a nonlinear field theory derived from an action principle.When considering stability problems, it is useful to generalize this concept and to viewa perturbed flow as a field on an unperturbed flow.
10.5. The Lagrangian displacement
Now consider two different flows, x(a, t) and x(a, t), for which the initial values of theadvected quantities, s0, ρ0 andB0, are the same. The two deformation tensors are relatedby the chain rule,
Fij = JikFkj , (10.30)
where
Jik =∂xi∂xk
(10.31)
is the Jacobian matrix of the map x 7→ x. Similarly,
F = JF, (10.32)
where
J = det(Jij) (10.33)
is the Jacobian determinant. The advected quantities in the two flows are therefore relatedby the composition of maps,
sL(a, t) = sL(a, t),
ρL(a, t) = J−1ρL(a, t),
BLi (a, t) = J−1JijB
Lj (a, t).
(10.34)
The Lagrangian displacement (Figure 18) is the relative displacement of the fluid ele-ment in the two flows,
ξ = x− x. (10.35)

58 Gordon I. Ogilvie
Figure 18. The Lagrangian displacement of a fluid element.
Thus (with ξi,j = ∂ξi/∂xj)
Jij = δij + ξi,j ,
J =1
6ǫijkǫlmnJilJjmJkn
=1
6ǫijkǫlmn(δil + ξi,l)(δjm + ξj,m)(δkn + ξk,n)
=1
6ǫijkǫijk +
1
2ǫijkǫijnξk,n +
1
2ǫijkǫimnξj,mξk,n +O(ξ3)
= 1 + ξk,k +1
2(ξj,jξk,k − ξj,kξk,j) +O(ξ3).
(10.36)
From the binomial theorem,
J−1 = 1− ξk,k +1
2(ξj,jξk,k + ξj,kξk,j) +O(ξ3). (10.37)
10.6. The Lagrangian for a perturbed flow
We now use the action principle to construct a theory for the displacement as a field onthe unperturbed flow: ξ = ξ(x, t). The action for the perturbed flow is
S[ξ] =
∫ ∫
L(
ξ,∂ξ
∂t,∇ξ
)
d3x dt, (10.38)
where
L = ρ
(
1
2u2 − Φ− e− B2
2µ0ρ
)
= ρ
[
1
2u2 − Φ(x+ ξ)− e(Jρ−1, s)− J−1JijBjJikBk
2µ0ρ
]
,
(10.39)
with
u =Dx
Dt= u+
∂ξ
∂t+ u · ∇ξ. (10.40)

Astrophysical fluid dynamics 59
The Euler–Lagrange equation for the variational principle δS = 0 is
∂
∂t
∂L∂ξi
+∂
∂xj
∂L∂ξi,j
− ∂L∂ξi
= 0, (10.41)
where ξi = ∂ξi/∂t. We expand the various terms of L in powers of ξ:
1
2ρu2 =
1
2ρu2 + ρui
(
∂ξi∂t
+ uj∂ξi∂xj
)
+1
2ρ
(
∂ξi∂t
+ uj∂ξi∂xj
)(
∂ξi∂t
+ uk∂ξi∂xk
)
,
− ρΦ(x+ ξ) = −ρ[
Φ(x) + ξi∂Φ
∂xi+
1
2ξiξj
∂2Φ
∂xi∂xj+O(ξ3)
]
,
− ρ
(
e +B2
2µ0ρ
)
= −(
ρe+B2
2µ0
)
− Vij∂ξi∂xj
− 1
2Vijkℓ
∂ξi∂xj
∂ξk∂xℓ
+O(ξ3).
(10.42)
This last expression uses the fact that e, B and ρ depend only on ∇ξ (through J andJij) and can therefore be expanded in a Taylor series in this quantity. A short calculationof this expansion gives
Vij = −(
p+B2
2µ0
)
δij +BiBj
µ0, (10.43)
which is the stress tensor used above, and
Vijkℓ =
[
(γ − 1)p+B2
2µ0
]
δijδkℓ+
(
p+B2
2µ0
)
δiℓδjk+1
µ0BjBℓδik−
1
µ0(BiBjδkℓ+BkBℓδij),
(10.44)which has the symmetry
Vijkℓ = Vkℓij (10.45)
necessitated by its function in the Taylor series. We now have
∂L∂ξi
= ρui + ρDξiDt
,
∂L∂ξi,j
= ρuiuj + ρujDξiDt
− Vij − Vijkℓ∂ξk∂xℓ
+O(ξ2),
∂L∂ξi
= −ρ ∂Φ∂xi
− ρξj∂2Φ
∂xi∂xj+O(ξ2).
(10.46)
Since ξ = 0 must be a solution of the Euler–Lagrange equation, it is no surprise thatthe terms independent of ξ cancel by virtue of the equation of motion of the unperturbedflow,
∂
∂t(ρui) +
∂
∂xj(ρuiuj − Vij) + ρ
∂Φ
∂xi= 0. (10.47)
The remaining terms are
∂
∂t
(
ρDξiDt
)
+∂
∂xj
(
ρujDξiDt
− Vijkℓ∂ξk∂xℓ
)
+ ρξj∂2Φ
∂xi∂xj+O(ξ2) = 0, (10.48)
or (making use of the equation of mass conservation)
ρD2ξiDt2
=∂
∂xj
(
Vijkℓ∂ξk∂xℓ
)
− ρξj∂2Φ
∂xi∂xj+O(ξ2). (10.49)
This equation, which can be extended to any order in ξ, provides the basis for a

60 Gordon I. Ogilvie
nonlinear perturbation theory for any flow in ideal MHD. In a linear theory we wouldneglect terms of O(ξ2).
10.7. Notes on linear perturbations
The Lagrangian perturbation ∆X of a quantity X is the difference in the values of thequantity in the two flows for the same fluid element,
∆X = XL(a, t)−XL(a, t). (10.50)
It follows that
∆s = 0, ∆ρ = −ρ ∂ξi∂xi
+O(ξ2), ∆Bi = Bj∂ξi∂xj
−Bi∂ξj∂xj
+O(ξ2), (10.51)
and
∆ui =DξiDt
. (10.52)
In linear theory, ∇ξ is small and terms higher than the first order are neglected. Thus
∆s = 0, ∆ρ = −ρ∇ · ξ, ∆B = B · ∇ξ − (∇ · ξ)B. (10.53)
In linear theory, ∆s = 0 implies
∆p =γp
ρ∆ρ = −γp∇ · ξ. (10.54)
The Eulerian perturbation δX of a quantity X is the difference in the values of thequantity in the two flows at the same point in space,
δX = XE(x, t)−XE(x, t). (10.55)
By Taylor’s theorem,
∆X = δX + ξ · ∇X +O(ξ2), (10.56)
and so, in linear theory,
δX = ∆X − ξ · ∇X. (10.57)
Thus
δρ = −ρ∇ · ξ − ξ · ∇ρ,
δp = −γp∇ · ξ − ξ · ∇p,
δB = B · ∇ξ − ξ · ∇B − (∇ · ξ)B,
(10.58)
exactly as was obtained in Section 5 for perturbations of magnetostatic equilibria.The relation
δu =Dξ
Dt− ξ · ∇u (10.59)
can be used to introduce the Lagrangian displacement into a linear theory derived usingEulerian perturbations. Only in the case of a static basic state, u = 0, does this reduceto the simple relation δu = ∂ξ/∂t.

Astrophysical fluid dynamics 61
11. Waves and instabilities in stratified rotating astrophysical bodies
11.1. The energy principle
For linear perturbations to a static equilibrium (u = 0), the displacement satisfies
ρ∂2ξi∂t2
= −ρ∂ δΦ∂xi
− ρξj∂2Φ
∂xi∂xj+
∂
∂xj
(
Vijkl∂ξk∂xl
)
, (11.1)
where we now allow for self-gravitation through
∇2 δΦ = 4πGδρ = −4πG∇ · (ρξ). (11.2)
We may write equation (11.1) in the form
∂2ξ
∂t2= Fξ, (11.3)
where F is a linear differential operator (or integro-differential if self-gravitation is takeninto account). The force operator F can be shown to be self-adjoint with respect to theinner product,
〈η, ξ〉 =∫
ρη∗· ξ dV (11.4)
if appropriate boundary conditions apply to the vector fields ξ and η. Let δΨ be thegravitational potential perturbation associated with the displacement η, so ∇2δΨ =−4πG∇ · (ρη). Then
〈η,Fξ〉 =∫ [
−ρη∗i∂ δΦ
∂xi− ρη∗i ξj
∂2Φ
∂xi∂xj+ η∗i
∂
∂xj
(
Vijkl∂ξk∂xl
)]
dV
=
∫ [
−δΦ∇2δΨ∗
4πG− ρξiη
∗j
∂2Φ
∂xi∂xj− Vijkl
∂ξk∂xl
∂η∗i∂xj
]
dV
=
∫[
∇(δΦ) · ∇(δΨ∗)
4πG− ρξiη
∗j
∂2Φ
∂xi∂xj+ ξk
∂
∂xl
(
Vijkl∂η∗i∂xj
)]
dV
=
∫ [
−δΨ∗∇2δΦ
4πG− ρξiη
∗j
∂2Φ
∂xi∂xj+ ξi
∂
∂xj
(
Vklij∂η∗k∂xl
)]
dV
=
∫ [
−ρξi∂ δΨ∗
∂xi− ρξiη
∗j
∂2Φ
∂xi∂xj+ ξi
∂
∂xj
(
Vijkl∂η∗k∂xl
)]
dV
= 〈Fη, ξ〉.
(11.5)
Here the integrals are over all space. We assume that the exterior of the body is a mediumof zero density in which the force-free limit of MHD holds and B decays sufficiently fastas |x| → ∞ that we may integrate freely by parts (using the divergence theorem) andignore surface terms. We also assume that the body is isolated and self-gravitating, sothat δΦ = O(r−1), or in fact O(r−2) if δM = 0. We have used the symmetry propertiesof ∂2Φ/∂xi∂xj and Vijkl .The functional
W [ξ] = −1
2〈ξ,Fξ〉 = 1
2
∫ (
−|∇δΦ|24πG
+ ρξ∗i ξj∂2Φ
∂xi∂xj+ Vijkl
∂ξ∗i∂xj
∂ξk∂xl
)
dV (11.6)
is therefore real and represents the change in potential energy associated with the dis-placement ξ.If the basic state is static, we may consider normal-mode solutions of the form
ξ = Re[
ξ(x) exp(−iωt)]
, (11.7)

62 Gordon I. Ogilvie
for which we obtain
− ω2ξ = F ξ (11.8)
and
ω2 = −〈ξ,F ξ〉〈ξ, ξ〉
=2W [ξ]
〈ξ, ξ〉. (11.9)
Therefore ω2 is real and we have either oscillations (ω2 > 0) or instability (ω2 < 0).
The above expression for ω2 satisfies the usual Rayleigh–Ritz variational principlefor self-adjoint eigenvalue problems. The eigenvalues ω2 are the stationary values of2W [ξ]/〈ξ, ξ〉 among trial displacements ξ satisfying the boundary conditions. In partic-ular, the lowest eigenvalue is the global minimum value of 2W [ξ]/〈ξ, ξ〉. Therefore theequilibrium is unstable if and only ifW [ξ] can be made negative by a trial displacement ξsatisfying the boundary conditions. This is called the energy principle.
This discussion is incomplete because it assumes that the eigenfunctions form a com-plete set. In general a continuous spectrum, not associated with square-integrable modes,is also present. However, it can be shown that a necessary and sufficient condition forinstability is that W [ξ] can be made negative as described above. Consider the equationfor twice the energy of the perturbation,
d
dt
(
〈ξ, ξ〉+ 2W [ξ])
= 〈ξ, ξ〉+ 〈ξ, ξ〉 − 〈ξ,Fξ〉 − 〈ξ,F ξ〉
= 〈Fξ, ξ〉+ 〈ξ,Fξ〉 − 〈ξ,Fξ〉 − 〈Fξ, ξ〉= 0.
(11.10)
Therefore
〈ξ, ξ〉+ 2W [ξ] = 2E = constant, (11.11)
where E is determined by the initial data ξ0 and ξ0. If W is positive definite then theequilibrium is stable because ξ is limited by the constraint W [ξ] 6 E.
Suppose that a (real) trial displacement η can be found for which
2W [η]
〈η,η〉 = −γ2, (11.12)
where γ > 0. Then let the initial conditions be ξ0 = η and ξ0 = γη so that
〈ξ, ξ〉+ 2W [ξ] = 2E = 0. (11.13)
Now let
a(t) = ln
( 〈ξ, ξ〉〈η,η〉
)
(11.14)
so that
da
dt=
2〈ξ, ξ〉〈ξ, ξ〉 (11.15)

Astrophysical fluid dynamics 63
and
d2a
dt2=
2(〈ξ,Fξ〉+ 〈ξ, ξ〉)〈ξ, ξ〉 − 4〈ξ, ξ〉2〈ξ, ξ〉2
=2(−2W [ξ] + 〈ξ, ξ〉)〈ξ, ξ〉 − 4〈ξ, ξ〉2
〈ξ, ξ〉2
=4(〈ξ, ξ〉〈ξ, ξ〉 − 〈ξ, ξ〉2)
〈ξ, ξ〉2> 0
(11.16)
by the Cauchy–Schwarz inequality. Thus
da
dt> a0 = 2γ
a > 2γt+ a0 = 2γt.(11.17)
Therefore the disturbance with these initial conditions grows at least as fast as exp(γt)and the equilibrium is unstable.
11.2. Spherically symmetric star
The simplest model of a star neglects rotation and magnetic fields and assumes a spher-ically symmetric hydrostatic equilibrium in which ρ(r) and p(r) satisfy
dp
dr= −ρg, (11.18)
with inward radial gravitational acceleration
g(r) =dΦ
dr=G
r2
∫ r
0
ρ(r′) 4πr′2 dr′. (11.19)
The stratification induced by gravity provides a non-uniform background for wave prop-agation.In this case the linearized equation of motion is (cf. Section 5)
ρ∂2ξ
∂t2= −ρ∇δΦ− δρ∇Φ−∇δp, (11.20)
with δρ = −∇ · (ρξ), ∇2δΦ = 4πGδρ and δp = −γp∇ · ξ − ξ · ∇p. For normal modes∝ exp(−iωt),
ρω2ξ = ρ∇δΦ+ δρ∇Φ+∇δp
ω2
∫
V
ρ|ξ|2 dV =
∫
V
ξ∗ · (ρ∇δΦ+ δρ∇Φ+∇δp) dV,(11.21)
where V is the volume of the star. At the surface S of the star, we assume that ρ and pvanish. Then δp also vanishes on S (assuming that ξ and its derivatives are bounded).The δp term can be integrated by parts as follows:
∫
V
ξ∗ · ∇δp dV = −∫
V
(∇ · ξ)∗δp dV
=
∫
V
1
γp(δp+ ξ · ∇p)∗δp dV
=
∫
V
[ |δp|2γp
+1
γp(ξ∗ · ∇p)(−ξ · ∇p− γp∇ · ξ)
]
dV.
(11.22)

64 Gordon I. Ogilvie
The δρ term partially cancels with the above:∫
V
ξ∗ · (δρ∇Φ) =
∫
V
(−ξ∗ · ∇p)δρ
ρdV
=
∫
V
(ξ∗ · ∇p)(∇ · ξ + ξ · ∇ ln ρ) dV.
(11.23)
Finally, the δΦ term can be transformed as in Section 11.1 to give∫
V
ρξ∗ · ∇δΦdV = −∫
∞
|∇δΦ|24πG
dV, (11.24)
where the integral on the right-hand side is over all space. Thus
ω2
∫
V
ρ|ξ|2 dV = −∫
∞
|∇δΦ|24πG
dV +
∫
V
[ |δp|2γp
− (ξ∗ · ∇p) ·
(
1
γξ · ∇ ln p− ξ · ∇ ln ρ
)]
dV
= −∫
∞
|∇δΦ|24πG
dV +
∫
V
( |δp|2γp
+ ρN2|ξr|2)
dV,
(11.25)
where N(r) is the Brunt–Vaisala frequency† (or buoyancy frequency) given by
N2 = g
(
1
γ
d ln p
dr− d ln ρ
dr
)
∝ gds
dr. (11.26)
N is the frequency of oscillation of a fluid element that is displaced vertically in a stablystratified atmosphere if it maintains pressure equilibrium with its surroundings. Thestratification is stable if the specific entropy increases outwards.The integral expression for ω2 satisfies the energy principle. There are three contri-
butions to ω2: the self-gravitational term (destabilizing), the acoustic term (stabilizing)and the buoyancy term (stabilizing if N2 > 0).If N2 < 0 for any interval of r, a trial displacement can always be found such that
ω2 < 0. This is done by localizing ξr in that interval and arranging the other componentsof ξ such that δp = 0. Therefore the star is unstable if ∂s/∂r < 0 anywhere. This isSchwarzschild’s criterion‡ for convective instability.
11.3. Modes of an incompressible sphere
Note: in this subsection (r, θ, φ) are spherical polar coordinates.Analytical solutions can be obtained in the case of a homogeneous incompressible ‘star’
of mass M and radius R which has
ρ =
(
3M
4πR3
)
H(R− r), (11.27)
where H is the Heaviside step function. For r 6 R we have
g =GMr
R3, p =
3GM2(R2 − r2)
8πR6. (11.28)
For an incompressible fluid,
∇ · ξ = 0, (11.29)
δρ = −ξ · ∇ρ = ξr
(
3M
4πR3
)
δ(r −R) (11.30)
† Sir David Brunt (1886–1965), British. Vilho Vaisala (1889–1969), Finnish.‡ Karl Schwarzschild (1873–1916), German.

Astrophysical fluid dynamics 65
and
∇2δΦ = 4πGδρ = ξr
(
3GM
R3
)
δ(r −R), (11.31)
while δp is indeterminate and is a variable independent of ξ. The linearized equation ofmotion is
− ρω2ξ = −ρ∇δΦ−∇δp. (11.32)
Therefore we have potential flow: ξ = ∇U , with ∇2U = 0 and −ρω2U = −ρ δΦ − δpin r 6 R. Appropriate solutions of Laplace’s equation regular at r = 0 are the solidspherical harmonics (with arbitrary normalization)
U = rℓY mℓ (θ, φ), (11.33)
where ℓ and m are integers with ℓ > |m|. Equation (11.31) also implies
δΦ =
ArℓY mℓ , r < R,
Br−ℓ−1Y mℓ , r > R,
(11.34)
where A and B are constants to be determined. The matching conditions from equa-tion (11.31) at r = R are
[δΦ] = 0,
[
∂ δΦ
∂r
]
= ξr
(
3GM
R3
)
. (11.35)
Thus
BR−ℓ−1 −ARℓ = 0, −(ℓ+ 1)BR−ℓ−2 − ℓARℓ−1 = ℓRℓ−1
(
3GM
R3
)
, (11.36)
with solution
A = − ℓ
2ℓ+ 1
(
3GM
R3
)
, B = AR2ℓ+1. (11.37)
At r = R the Lagrangian pressure perturbation should vanish:
∆p = δp+ ξ · ∇p = 0(
3M
4πR3
)[
ω2Rℓ +
(
ℓ
2ℓ+ 1
)(
3GM
R3
)
Rℓ
]
− 3GM2
4πR5ℓRℓ−1 = 0
ω2 =
(
ℓ− 3ℓ
2ℓ+ 1
)
GM
R2=
2ℓ(ℓ− 1)
2ℓ+ 1
GM
R3.
(11.38)
This result was obtained by Lord Kelvin. Since ω2 > 0 the star is stable. Note that ℓ = 0corresponds to ξ = 0 and ℓ = 1 corresponds to ξ = constant, which is a translationalmode of zero frequency. The remaining modes are non-trivial and are called f modes(fundamental modes). These can be thought of as surface gravity waves, related to oceanwaves for which ω2 = gk. In the first expression for ω2 above, the first term in bracketsderives from surface gravity, while the second derives from self-gravity.
11.4. The plane-parallel atmosphere
The local dynamics of a stellar atmosphere can be studied in a Cartesian (‘plane parallel’)approximation. The gravitational acceleration is taken to be constant (appropriate to anatmosphere) and in the −z direction. For hydrostatic equilibrium,
dp
dz= −ρg. (11.39)

66 Gordon I. Ogilvie
A simple example is an isothermal atmosphere in which p = c2sρ with cs = constant:
ρ = ρ0 e−z/H , p = p0 e
−z/H . (11.40)
H = c2s/g is the isothermal scale-height. The Brunt–Vaisala frequency in an isothermalatmosphere is given by
N2 = g
(
1
γ
d ln p
dz− d ln ρ
dz
)
=
(
1− 1
γ
)
g
H, (11.41)
which is constant and is positive for γ > 1. An isothermal atmosphere is stably (subadi-abatically) stratified if γ > 1 and neutrally (adiabatically) stratified if γ = 1.A further example is a polytropic atmosphere in which p ∝ ρ1+1/m in the undisturbed
state, where m is a positive constant. In general 1 + 1/m differs from the adiabaticexponent γ of the gas. For hydrostatic equilibrium,
ρ1/mdρ
dz∝ −ρg ⇒ ρ1/m ∝ −z, (11.42)
if the top of the atmosphere is located at z = 0, with vacuum above. Let
ρ = ρ0
(
− z
H
)m
, (11.43)
for z < 0, where ρ0 and H are constants. Then
p = p0
(
− z
H
)m+1
, (11.44)
where
p0 =ρ0gH
m+ 1(11.45)
to satisfy dp/dz = −ρg. In this case
N2 =
(
m− m+ 1
γ
)
g
−z . (11.46)
We return to the linearized equations, looking for solutions of the form
ξ = Re[
ξ(z) exp(−iωt+ ikh · x)]
, etc. (11.47)
where ‘h’ denotes a horizontal vector (having only x and y components). Then
−ρω2ξh = −ikh δp,
−ρω2ξz = −g δρ− d δp
dz,
δρ = −ξzdρ
dz− ρ∆,
δp = −ξzdp
dz− γp∆,
(11.48)
where
∆ = ∇ · ξ = ikh · ξh +dξzdz
. (11.49)
The self-gravitation of the perturbation is neglected in the atmosphere: δΦ = 0 (theCowling approximation). Note that only two z-derivatives of perturbation quantities oc-cur: d δp/dz and dξz/dz. This is a second-order system of ordinary differential equations(ODEs), combined with algebraic equations.

Astrophysical fluid dynamics 67
We can easily eliminate ξh to obtain
∆ = − k2hρω2
δp+dξzdz
, (11.50)
where kh = |kh|, and eliminate δρ to obtain
− ρω2ξz = gξzdρ
dz+ ρg∆− d δp
dz. (11.51)
We consider these two differential equations in combination with the remaining algebraicequation
δp = ρgξz − γp∆. (11.52)
A first approach is to solve the algebraic equation for ∆ and substitute to obtain thetwo coupled ODEs
dξzdz
=g
v2sξz +
1
ρv2s
(
v2s k2h
ω2− 1
)
δp,
d δp
dz= ρ(ω2 −N2)ξz −
g
v2sδp.
(11.53)
Note that v2s k2h is the square of the ‘Lamb frequency’, i.e. the (z-dependent) frequency of a
horizontal sound wave of wavenumber kh. In a short-wavelength (WKB) approximation,where ξz ∝ exp
[
i∫
kz(z) dz]
with kz ≫ g/v2s , the local dispersion relation derived fromthese ODEs is
v2s k2z = (ω2 −N2)
(
1− v2s k2h
ω2
)
. (11.54)
Propagating waves (k2z > 0) are possible when
either ω2 > max(v2s k2h, N
2) or 0 < ω2 < min(v2s k2h, N
2). (11.55)
The high-frequency branch describes p modes (acoustic waves: ‘p’ for pressure) while thelow-frequency branch describes g modes (internal gravity waves: ‘g’ for gravity).There is a special incompressible solution in which ∆ = 0, i.e. δp = ρgξz. This satisfies
dξzdz
=gk2hω2
ξz ,dξzdz
=ω2
gξz. (11.56)
For compatibility of these equations,
gk2hω2
=ω2
g⇒ ω2 = ±gkh. (11.57)
The acceptable solution in which ξz decays with depth is
ω2 = gkh, ξz ∝ exp(khz). (11.58)
This is a surface gravity wave known in stellar oscillations as the f mode (fundamentalmode). It is vertically evanescent.The other wave solutions (p and g modes) can be found analytically in the case of a
polytropic atmosphere.†We now eliminate variables in favour of ∆. First use the algebraicrelation to eliminate δp:
∆ = −gk2h
ω2ξz +
v2s k2h
ω2∆+
dξzdz
, (11.59)
† Lamb (1932), Art. 312.

68 Gordon I. Ogilvie
− ρω2ξz = ρg∆− ρgdξzdz
+d(γp∆)
dz. (11.60)
Then eliminate dξz/dz:
− ρω2ξz = −ρg(
gk2hω2
ξz −v2s k
2h
ω2∆
)
+d(γp∆)
dz. (11.61)
Thus we havedξzdz
− gk2hω2
ξz =
(
1− v2s k2h
ω2
)
∆, (11.62)
− ω2
(
1− g2k2hω4
)
ξz =1
ρ
d(ρv2s∆)
dz+ v2s
gk2hω2
∆. (11.63)
Combine, eliminating ξz :(
d
dz− gk2h
ω2
)[
v2sd∆
dz+
1
ρ
d(ρv2s )
dz∆+ v2s
gk2hω2
∆
]
+ ω2
(
1− g2k2hω4
)(
1− v2s k2h
ω2
)
∆ = 0.
(11.64)Expand out:
v2sd2∆
dz2+
[
dv2sdz
+1
ρ
d(ρv2s )
dz
]
d∆
dz+
[
d
dz
(
1
ρ
d(ρv2s )
dz
)
+dv2sdz
gk2hω2
− gk2hω2
1
ρ
d(ρv2s )
dz
+ ω2
(
1− g2k2hω4
− v2s k2h
ω2
)]
∆ = 0.
(11.65)
In the case of a polytropic atmosphere, v2s ∝ z and ρv2s ∝ zm+1:
v2sd2∆
dz2+ (m+ 2)
v2sz
d∆
dz+
[
−mgk2hω2
v2sz
+ ω2
(
1− g2k2hω4
− v2s k2h
ω2
)]
∆ = 0. (11.66)
In fact, v2s /z = −γg/(m+ 1). Divide through by this factor:
zd2∆
dz2+ (m+ 2)
d∆
dz−[
mgk2hω2
+(m+ 1)
γgω2
(
1− g2k2hω4
)
+ k2hz
]
∆ = 0. (11.67)
Finally,
zd2∆
dz2+ (m+ 2)
d∆
dz− (A+ khz)kh∆ = 0, (11.68)
where
A =(m+ 1)
γ
ω2
gkh+
(
m− m+ 1
γ
)
gkhω2
(11.69)
is a dimensionless constant. Let ∆ = w(z) ekhz :
zd2w
dz2+ (m+ 2 + 2khz)
dw
dz− (A−m− 2)khw = 0. (11.70)
This is related to the confluent hypergeometric equation and has a regular singular pointat z = 0. Using the method of Frobenius, we seek power-series solutions
w =
∞∑
r=0
arzσ+r, (11.71)
where σ is a number to be determined and a0 6= 0. The indicial equation is
σ(σ +m+ 1) = 0 (11.72)

Astrophysical fluid dynamics 69
Figure 19. Dispersion relation, in arbitrary units, for a stably stratified plane-parallel polytropicatmosphere with m = 3 and γ = 5/3. The dashed line is the f mode. Above it are the first tenp modes and below it are the first ten g modes. Each curve is a parabola.
and the regular solution has σ = 0. The recurrence relation is then
ar+1
ar=
(A−m− 2− 2r)kh(r + 1)(r +m+ 2)
. (11.73)
In the case of an infinite series, ar+1/ar ∼ −2kh/r as r → ∞, so w behaves like e−2khz
and ∆ diverges like e−khz as z → −∞. Solutions in which ∆ decays with depth are thosefor which the series terminates and w is a polynomial. For a polynomial of degree n− 1(n > 1),
A = 2n+m. (11.74)
This gives a quadratic equation for ω2:
(m+ 1)
γ
(
ω2
gkh
)2
− (2n+m)
(
ω2
gkh
)
+
(
m− m+ 1
γ
)
= 0. (11.75)
A negative root for ω2 exists if and only if m− (m+ 1)/γ < 0, i.e. N2 < 0, as expectedfrom Schwarzschild’s criterion for stability.
For n≫ 1, the large root is
ω2
gkh∼ 2nγ
m+ 1(p modes, ω2 ∝ v2s ) (11.76)

70 Gordon I. Ogilvie
Figure 20. A standard model of the present Sun, up to the photosphere. Density,temperature, gravity and squared buoyancy frequency are plotted versus fractional radius.
and the small root is
ω2
gkh∼ 1
2n
(
m− m+ 1
γ
)
(g modes, ω2 ∝ N2). (11.77)
The f mode is the ‘trivial’ solution ∆ = 0. p modes (‘p’ for pressure) are acoustic waves,which rely on compressibility. g modes are gravity waves, which rely on buoyancy. Typicalbranches of the dispersion relation are illustrated in Figure 19.In solar-type stars the inner part (radiative zone) is convectively stable (N2 > 0) and
the outer part (convective zone) is unstable (N2 < 0). However, the convection is soefficient that only a very small entropy gradient is required to sustain the convectiveheat flux, so N2 is very small and negative in the convective zone. Although g modespropagate in the radiative zone at frequencies smaller than N , they cannot reach thesurface. Only f and p modes (excited by convection) are observed at the solar surface.In more massive stars the situation is reversed. Then f, p and g modes can be observed,
in principle, at the surface. g modes are particularly well observed in certain classes ofwhite dwarf.
Related examples: A.22, A.23, A.24, A.25.

Astrophysical fluid dynamics 71
Figure 21. The same model plotted on a logarithmic scale. In the convective region whereN2 < 0, the dotted line shows −N2 instead.
11.5. Tidally forced oscillations
When astrophysical fluid bodies such as stars and planets orbit sufficiently close to oneanother, they deform each other in ways that can cause irreversible evolution of their spinand orbital motion over astronomical time-scales. We consider here some of the simplestaspects of this problem.
Consider a binary star (or star–planet or planet–moon system, etc.) with a circularorbit. Let the orbital separation be a and the orbital (angular) frequency
Ωo =
(
GM
a3
)1/2
, (11.78)
where M = M1 +M2 is the combined mass of the two bodies. Let R1(t) and R2(t) bethe position vectors of the centres of mass of the two bodies, and d = R2 − R1 theirseparation.
The gravitational potential due to body 2 (treated as a point mass or spherical mass)

72 Gordon I. Ogilvie
at position R1 + x within body 1 is
− GM2
|d− x| = −GM2
(
|d|2 − 2d · x+ |x|2)−1/2
= −GM2
|d|
(
1− 2d · x
|d|2 +|x|2|d|2
)−1/2
= −GM2
|d|
[
1− 1
2
(
−2d · x
|d|2 +|x|2|d|2
)
+3
8
(
−2d · x
|d|2 +|x|2|d|2
)2
+ · · ·]
= −GM2
|d|
[
1 +d · x
|d|2 +3(d · x)2 − |d|2|x|2
2|d|4 +O
( |x|3|d|3
)]
.
(11.79)
In this Taylor expansion, the term independent of x is a uniform potential that has noeffect. The term linear in x gives rise to a uniform acceleration GMd/|d|3, which causesthe orbital motion of body 1. The remaining terms constitute the tidal potential Ψ; thequadratic terms written here are the tidal potential in the quadrupolar approximation.For a circular orbit, the coordinate system can be chosen such that
d = (a cosΩot, a sinΩot, 0). (11.80)
Introduce spherical polar coordinates within body 1 such that
x = (r sin θ cosφ, r sin θ sinφ, r cosφ). (11.81)
Then
d · x = ar sin θ cos(φ− Ωot), (11.82)
Ψ =GM2r
2
2a3[
1− 3 sin2 θ cos2(φ− Ωot)]
=GM2r
2
4a3[
2− 3 sin2 θ − 3 sin2 θ cos(2φ− 2Ωot)]
.
(11.83)
The first two terms are static; the remaining oscillatory part can be written as
Re
[
−3GM2r2 sin2 θ
4a3e2i(φ−Ωot)
]
, (11.84)
which involves the spherical harmonic function Y 22 (θ, φ) ∝ sin2 θ e2iφ.
The tidal frequency in a non-rotating frame is 2Ωo. In a frame rotating with the spinangular velocity Ωs of body 1, the tidal frequency is 2(Ωo − Ωs), owing to an angularDoppler shift.If the tidal frequency is sufficiently small, it might be assumed that body 1 responds
hydrostatically to the tidal potential. Under this assumption of an equilibrium tide, body 1is deformed into a spheroid with a tidal bulge that points instantaneously towards body 2,and no tidal torque is exerted.We can allow for a more general linear response, including dissipation and wavelike
disturbances (a dynamical tide) as follows. The most important aspect of the tidallydeformed body is its exterior gravitational potential perturbation δΦ, because it is onlythrough gravity that the bodies communicate and exchange energy and angular momen-tum. We write the linear response as
δΦ = Re
[
−k 3GM2 sin2 θ
4a3R5
1
r3e2i(φ−Ωot)
]
, (11.85)
where R1 is the radius of body 1 (or some appropriate measure of its radius if it is

Astrophysical fluid dynamics 73
deformed by its rotation) and k is the potential Love number, a dimensionless complexnumber that describes the amplitude and phase of the tidal response. Note that δΦinvolves the same frequency and the same spherical harmonic Y 2
2 (θ, φ), but combinedwith r−3 rather than r2 to make it a valid solution of Laplace’s equation in the exteriorof body 1. The factor of R5
1 is introduced so that k is dimensionless and measures theratio of δΦ and Ψ at the surface of body 1.
The imaginary part of k determines the part of the tidal response that is out of phasewith the tidal forcing, and which is associated with dissipation and irreversible evolution.The torque acting on the orbit of body 2 is
−T =M2r sin θ
(
− 1
r sin θ
∂ δΦ
∂φ
)
∣
∣
∣
∣
∣
r=a, θ=π/2, φ=Ωot
= Re
(
M2k3GM2
4a3R5
1
a32i
)
= −Im(k)3GM2
2R51
2a6.
(11.86)
By Newton’s Third Law, there is an equal and opposite torque, +T , acting on the spinof body 1.
The orbital angular momentum about the centre of mass is
Lo = µ(GMa)1/2, (11.87)
where µ =M1M2/M is the reduced mass of the system. [This result can be obtained byconsidering (Figure 22)
M1
(
M2a
M
)2
Ωo +M2
(
M1a
M
)2
Ωo =M1M2
M(GMa)1/2.] (11.88)
It evolves according to
dLo
dt= −T, (11.89)
which determines the rate of orbital migration:
1
2
M1M2
M(GMa)1/2
1
a
da
dt= −Im(k)
3GM22R
51
2a6
−1
a
da
dt= 3 Im(k)
M2
M1
(
R1
a
)5
Ωo.
(11.90)
The orbital energy
Eo = −µGM2a
(11.91)
evolves according to
dEo
dt= µ
GM
2a
1
a
da
dt= −ΩoT. (11.92)
The spin angular momentum Ls = I1Ωs and spin energy Es = 12I1Ω
2s , where I1 is the
moment of inertia of body 1, evolve according to
dLs
dt= T,
dEs
dt= ΩsT. (11.93)

74 Gordon I. Ogilvie
Figure 22. A binary star with two components in circular orbital motion about the centre ofmass.
The total energy therefore satisfies
d
dt(Eo + Es) = (Ωs − Ωo)T = −D, (11.94)
where D > 0 is the rate of dissipation of energy. To ensure D > 0, the sign of Im(k)should be the same as the sign of the tidal frequency 2(Ωo − Ωs).In a dissipative spin–orbit coupling, the tidal torque T tries to bring about an equaliza-
tion of the spin and orbital angular velocities. Its action, mediated by gravity, is compa-rable to a frictional interaction between differential rotating components in a mechanicalsystem.In binary stars, and other cases in which the spin angular momentum is small compared
to the orbital angular momentum, there is indeed a tendency towards synchronizationof the spin with the orbital motion (as the Moon is synchronized with its orbit aroundthe Earth). However, in systems of extreme mass ratio in which the spin of the largebody contains most of the angular momentum, the tidal torque instead causes orbitalmigration away from the synchronous orbit at which Ω = Ωs (Figure 23).This situation applies to the moons of solar-system planets, most of which migrate
outwards, and to extrasolar planets in close orbits around their host stars, where themigration is usually inward and may lead to the destruction of the planet.

Astrophysical fluid dynamics 75
Figure 23. Orbital migration away from the synchronous orbit driven by tidal dissipation in asystem of extreme mass ratio.
11.6. Rotating fluid bodies
Note: in this subsection (r, φ, z) are cylindrical polar coordinates.
11.6.1. Equilibrium
The equations of ideal gas dynamics in cylindrical polar coordinates are
DurDt
−u2φr
= −∂Φ∂r
− 1
ρ
∂p
∂r,
DuφDt
+uruφr
= −1
r
∂Φ
∂φ− 1
ρr
∂p
∂φ,
DuzDt
= −∂Φ∂z
− 1
ρ
∂p
∂z,
Dρ
Dt= −ρ
[
1
r
∂
∂r(rur) +
1
r
∂uφ∂φ
+∂uz∂z
]
,
Dp
Dt= −γp
[
1
r
∂
∂r(rur) +
1
r
∂uφ∂φ
+∂uz∂z
]
,
(11.95)
withD
Dt=
∂
∂t+ ur
∂
∂r+uφr
∂
∂φ+ uz
∂
∂z. (11.96)
Consider a steady, axisymmetric basic state with density ρ(r, z), pressure p(r, z), gravi-tational potential Φ(r, z) and with differential rotation
u = rΩ(r, z) eφ. (11.97)

76 Gordon I. Ogilvie
For equilibrium we require
− rΩ2 er = −∇Φ− 1
ρ∇p. (11.98)
Take the curl to obtain
− r∂Ω2
∂zeφ = ∇p×∇
(
1
ρ
)
= ∇T ×∇s. (11.99)
This is just the vorticity equation in a steady state. It is sometimes called the thermalwind equation. The equilibrium is called barotropic if ∇p is parallel to ∇ρ, otherwiseit is called baroclinic. In a barotropic state the angular velocity is independent of z:Ω = Ω(r). This is a version of the Taylor–Proudman theorem† which states that undercertain conditions the velocity in a rotating fluid is independent of height.We can also write
1
ρ∇p = g = −∇Φ + rΩ2 er, (11.100)
where g is the effective gravitational acceleration, including the centrifugal force associ-ated with the (non-uniform) rotation.In a barotropic state with Ω(r) we can write
g = −∇Φcg, Φcg = Φ(r, z) + Ψ(r), Ψ = −∫
rΩ2 dr. (11.101)
Also, since p = p(ρ) in the equilibrium state, we can define the pseudo-enthalpy h(ρ)such that dh = dp/ρ. An example is a polytropic model for which
p = Kρ1+1/m, h = (m+ 1)Kρ1/m. (11.102)
(h equals the true enthalpy only if the equilibrium is homentropic.) The equilibriumcondition then reduces to
0 = −∇Φcg −∇h (11.103)
or
Φ + Ψ+ h = C = constant. (11.104)
An example of a rapidly and differentially rotating equilibrium is an accretion discaround a central massM . For a non-self-gravitating disc Φ = −GM(r2+z2)−1/2. Assumethe disc is barotropic and let the arbitrary additive constant in h be defined (as in thepolytropic example above) such that h = 0 at the surfaces z = ±H(r) of the disc whereρ = p = 0. Then
−GM(r2 +H2)−1/2 +Ψ(r) = C, (11.105)
from which
rΩ2 = − d
dr
[
GM(r2 +H2)−1/2]
. (11.106)
For example, if H = ǫr with ǫ = constant being the aspect ratio of the disc, then
Ω2 = (1 + ǫ2)−1/2GM
r3. (11.107)
The thinner the disc is, the closer it is to Keplerian rotation. Once we have found the re-lation between Ω(r) and H(r), equation (11.104) then determines the spatial distributionof h (and therefore of ρ and p) within the disc.
† Joseph Proudman (1888–1975), British.

Astrophysical fluid dynamics 77
11.6.2. Linear perturbations
The basic state is independent of t and φ, allowing us to consider linear perturbationsof the form
Re [δur(r, z) exp(−iωt+ imφ)] , etc. (11.108)
where m is the azimuthal wavenumber (an integer). The linearized equations in theCowling approximation are
− iω δur − 2Ω δuφ = −1
ρ
∂ δp
∂r+δρ
ρ2∂p
∂r,
− iω δuφ +1
rδu · ∇(r2Ω) = − imδp
ρr,
− iω δuz = −1
ρ
∂ δp
∂z+δρ
ρ2∂p
∂z,
− iω δρ+ δu · ∇ρ = −ρ[
1
r
∂
∂r(r δur) +
imδuφr
+∂ δuz∂z
]
,
− iω δp+ δu · ∇p = −γp[
1
r
∂
∂r(r δur) +
imδuφr
+∂ δuz∂z
]
,
(11.109)
where
ω = ω −mΩ (11.110)
is the intrinsic frequency, i.e. the angular frequency of the wave measured in a frame ofreference that rotates with the local angular velocity of the fluid.Eliminate δuφ and δρ to obtain
(ω2 −A) δur −B δuz = − iω
ρ
(
∂ δp
∂r− ∂p
∂r
δp
γp
)
+ 2Ωimδp
ρr,
−C δur + (ω2 −D) δuz = − iω
ρ
(
∂ δp
∂z− ∂p
∂z
δp
γp
)
,
(11.111)
where
A =2Ω
r
∂
∂r(r2Ω)− 1
ρ
∂p
∂r
(
1
γp
∂p
∂r− 1
ρ
∂ρ
∂r
)
,
B =2Ω
r
∂
∂z(r2Ω)− 1
ρ
∂p
∂r
(
1
γp
∂p
∂z− 1
ρ
∂ρ
∂z
)
,
C = −1
ρ
∂p
∂z
(
1
γp
∂p
∂r− 1
ρ
∂ρ
∂r
)
,
D = −1
ρ
∂p
∂z
(
1
γp
∂p
∂z− 1
ρ
∂ρ
∂z
)
.
(11.112)
Note that A, B, C and D involve radial and vertical deriavtives of the specific angularmomentum r2Ω and the specific entropy s. The thermal wind equation implies
B = C, (11.113)
so the matrix
M =
[
A BC D
]
=
[
A BB D
]
(11.114)
is symmetric.

78 Gordon I. Ogilvie
11.6.3. The Høiland criteria
It can be useful to introduce the Lagrangian displacement ξ such that
∆u = δu+ ξ · ∇u =Dξ
Dt, (11.115)
i.e.
δur = −iωξr, δuφ = −iωξφ − rξ · ∇Ω, δuz = −iωξz . (11.116)
Note that
1
r
∂
∂r(r δur) +
imδuφr
+∂ δuz∂z
= −iω
[
1
r
∂
∂r(rξr) +
imξφr
+∂ξz∂z
]
. (11.117)
The linearized equations constitute an eigenvalue problem for ω but it is not self-adjointexcept when m = 0. We specialize to the case m = 0 (axisymmetric perturbations). Then
(ω2 −A)ξr −Bξz =1
ρ
(
∂ δp
∂r− ∂p
∂r
δp
γp
)
,
−Bξr + (ω2 −D)ξz =1
ρ
(
∂ δp
∂z− ∂p
∂z
δp
γp
)
,
(11.118)
with
δp = −γp∇ · ξ − ξ · ∇p. (11.119)
Multiply the first of equations (11.118) by ρξ∗r and the second by ρξ∗z and integrate overthe volume V of the fluid (using the boundary condition δp = 0) to obtain
ω2
∫
V
ρ(|ξr |2 + |ξz |2) dV =
∫
V
[
ρQ(ξ) + ξ∗ · ∇δp− δp
γpξ∗ · ∇p
]
dV
=
∫
V
[
ρQ(ξ)− δp
γp(γp∇ · ξ∗ + ξ∗ · ∇p)
]
dV
=
∫
V
(
ρQ(ξ) +|δp|2γp
)
dV,
(11.120)
where
Q(ξ) = A|ξr |2 + B(ξ∗r ξz + ξ∗z ξr) +D|ξz |2 =[
ξ∗r ξ∗z]
[
A BB D
] [
ξrξz
]
(11.121)
is the (real) Hermitian form associated with the matrix M.Note that this integral involves only the meridional components of the displacement. If
we had not made the Cowling approximation there would be the usual negative definitecontribution to ω2 from self-gravitation.The above integral relation therefore shows that ω2 is real, and a variational property
ensures that instability to axisymmetric perturbations occurs if and only if the integralon the right-hand side can be made negative by a suitable trial displacement. If Q ispositive definite then ω2 > 0 and we have stability. Now the characteristic equation ofthe matrix M is
λ2 − (A+D)λ+AD −B2 = 0. (11.122)
The eigenvalues λ± are both positive if and only if
A+D > 0 and AD −B2 > 0. (11.123)
If these conditions are satisfied throughout the fluid then Q > 0, which implies ω2 > 0,so the fluid is stable to axisymmetric perturbations (neglecting self-gravitation). These

Astrophysical fluid dynamics 79
conditions are also necessary for stability. If one of the eigenvalues is negative in someregion of the meridional plane, then a trial displacement can be found which is localizedin that region, has δp = 0 and Q < 0, implying instability. (By choosing ξ in the correctdirection and tuning ∇ · ξ appropriately, it is possible to arrange for δp to vanish.)Using ℓ = r2Ω (specific angular momentum) and s = cp(γ
−1 ln p − ln ρ) + constant(specific entropy) for a perfect ideal gas, we have
A =1
r3∂ℓ2
∂r− grcp
∂s
∂r,
B =1
r3∂ℓ2
∂z− grcp
∂s
∂z= −gz
cp
∂s
∂r,
D = −gzcp
∂s
∂z,
(11.124)
so the two conditions become
1
r3∂ℓ2
∂r− 1
cpg · ∇s > 0 (11.125)
and
− gz
(
∂ℓ2
∂r
∂s
∂z− ∂ℓ2
∂z
∂s
∂r
)
> 0. (11.126)
These are the Høiland stability criteria†.(If the criteria are marginally satisfied a further investigation may be required.)Consider first the non-rotating case ℓ = 0. The first criterion reduces to the Schwarzschild
criterion for convective stability,
− 1
cpg · ∇s ≡ N2 > 0. (11.127)
In the homentropic case s = constant (which is a barotropic model) they reduce to theRayleigh criterion‡ for centrifugal (inertial) stability,
dℓ2
dr> 0. (11.128)
which states that the specific angular momentum should increase with r for stability.The second Høiland criterion is equivalent to
(er × (−g)) · (∇ℓ2 ×∇s) > 0 (11.129)
In other words the vectors er × (−g) and ∇ℓ2 ×∇s should be parallel (rather than an-tiparallel). In a rotating star, for stability we require that the specific angular momentumshould increase with r on each surface of constant entropy.
Related example: A.26.
† Einar Høiland (1907–1974), Norwegian‡ John William Strutt, Lord Rayleigh (1842–1919), British

80 Gordon I. Ogilvie
Appendix A. Examples
A.1. Validity of a fluid approach
The Coulomb cross-section for ‘collisions’ (i.e. large-angle scatterings) between electronsand protons is σ ≈ 1 × 10−4(T/K)−2 cm2. Why does it depend on the inverse square ofthe temperature?Using the numbers quoted in Section 2.9.3 (or elsewhere), estimate the order of mag-
nitude of the mean free path and the collision frequency in (i) the centre of the Sun, (ii)the solar corona, (iii) a molecular cloud and (iv) the hot phase of the interstellar medium.Is a fluid approach likely to be valid in these systems?
A.2. Vorticity equation
Show that the vorticity ω = ∇×u of an ideal fluid without a magnetic field satisfies theequation
∂ω
∂t= ∇× (u×ω) +∇p×∇v, (A 1)
where v = 1/ρ is the specific volume. Explain why the last term, which acts as a source ofvorticity, can also be written as ∇T ×∇s. Under what conditions does this ‘baroclinic’source term vanish, and in what sense(s) can the vorticity then be said to be ‘conserved’?Show that the (Rossby–Ertel) potential vorticity 1
ρ ω · ∇s is conserved, as a materialinvariant, even when the baroclinic term is present.
A.3. Homogeneous expansion or contraction
(This question explores a very simple fluid flow in which compressibility and self-gravityare important.)A homogeneous perfect gas of density ρ = ρ0(t) occupies the region |x| < R(t), sur-
rounded by a vacuum. The pressure is p = p0(t)(1 − |x|2/R2) and the velocity field isu = A(t)x, where A = R/R.Using either Cartesian or spherical polar coordinates, show that the equations of New-
tonian gas dynamics and the boundary conditions are satisfied provided that
ρ0 ∝ R−3, p0 ∝ R−3γ , R = −4πGρ0R
3+
2p0ρ0R
. (A 2)
Deduce the related energy equation
1
2R2 − 4πGρ0R
2
3+
2p03(γ − 1)ρ0
= constant, (A 3)
and interpret the three contributions. Discuss the dynamics qualitatively in the two casesγ > 4/3 and 1 < γ < 4/3.†
A.4. Dynamics of ellipsoidal bodies
(This question uses Cartesian tensor notation and the summation convention.)A fluid body occupies a time-dependent ellipsoidal volume centred on the origin. Let
f(x, t) = 1− Sijxixj , where Sij(t) is a symmetric tensor with positive eigenvalues, such
† This flow is similar in form to the cosmological ‘Hubble flow’ and can be seen as a homo-geneous expansion or contraction centred on any point, if a Galilean transformation is made.In the limit R → ∞ (for γ > 4/3), or if the pressure is negligible, the equations derived herecorrespond to the Friedmann equations for a ‘dust’ universe (i.e. negligible relativistic pressure
p ≪ ρc2) with a scale factor a ∝ R, aa= − 4πGρ0
3and a2+constant
a2 = 8πGρ03
. See Bondi (1960) fora discussion of Newtonian cosmology.

Astrophysical fluid dynamics 81
that the body occupies the region 0 < f 6 1 with a free surface at f = 0. The velocityfield is ui = Aijxj , where Aij(t) is a tensor that is not symmetric in general. Assumethat the gravitational potential inside the body has the form Φ = Bijxixj + constant,where Bij(t) is a symmetric tensor.Show that the equations of Newtonian gas dynamics and the boundary conditions are
satisfied if the density and pressure are of the form
ρ = ρ0(t)ρ(f), p = ρ0(t)T (t)p(f), (A 4)
where the dimensionless functions p(f) and ρ(f) are related by p′(f) = ρ(f) with the nor-malization ρ(1) = 1 and the boundary condition p(0) = 0, provided that the coefficientsevolve according to
Sij + SikAkj + SjkAki = 0,
Aij +AikAkj = −2Bij + 2TSij,
ρ0 = −ρ0Aii,
T = −(γ − 1)TAii.
(A 5)
Examples of the spatial structure are the homogeneous body: ρ = 1, p = f , and thepolytrope of index n: ρ = fn, p = fn+1/(n+1). Show that Poisson’s equation cannot besatisfied if the body is inhomogeneous.†Show how the results of the previous question are recovered in the case of a homoge-
neous, spherically symmetric body.
A.5. Resistive MHD
Ohm’s Law for a medium of electrical conductivity σ is J = σE, where E is the electricfield measured in the rest frame of the conductor. Show that, in the presence of a finiteand uniform conductivity, the ideal induction equation is modified to
∂B
∂t= ∇× (u×B) + η∇2B, (A 6)
where η = 1/(µ0σ) is the magnetic diffusivity, proportional to the resistivity of the fluid.Hence argue that the effects of finite conductivity are small if the magnetic Reynoldsnumber Rm = LU/η is large, where L and U are characteristic scales of length andvelocity for the fluid flow.‡
A.6. Flux freezing
Consider a magnetic field that is defined in terms of two Euler potentials α and β by
B = ∇α×∇β. (A 7)
(This is sometimes called a Clebsch representation.) Show that a vector potential of theform A = α∇β+∇γ generates this magnetic field via B = ∇×A, and that the magneticfield lines are the intersections of the families of surfaces α = constant and β = constant.
† It can be shown that the self-gravity of a homogeneous ellipsoid generates an interior grav-itational potential of the assumed form. The behaviour of self-gravitating, homogeneous, in-compressible ellipsoids was investigated by many great mathematicians, including Maclaurin,Jacobi, Dirichlet, Dedekind, Riemann and Poincare, illustrating the equilibrium and stability ofrotating and tidally deformed astrophysical bodies (Chandrasekhar 1969).
‡ The magnetic diffusivity in a fully ionized plasma is on the order of 1013(T/K)−3/2 cm2 s−1.Simple estimates imply that Rm ≫ 1 for observable solar phenomena.

82 Gordon I. Ogilvie
Show also that
∂B
∂t−∇× (u×B) = ∇
(
Dα
Dt
)
×∇β +∇α×∇
(
Dβ
Dt
)
. (A 8)
Deduce that the ideal induction equation is satisfied if the families of surfaces α =constant and β = constant are material surfaces, in which case the magnetic field linescan also be identified with material curves.
A.7. Equilibrium of a solar prominence
A simple model for a prominence or filament in the solar atmosphere involves a two-dimensional magnetostatic equilibrium in the (x, z) plane with uniform gravity g =−g ez. The gas is isothermal with isothermal sound speed cs. The density and magneticfield depend only on x and the field lines become straight as |x| → ∞.Show that the solution is of the form
Bz = B0 tanh(kx), (A 9)
where k is a constant to be determined. Sketch the field lines and find the density distri-bution.
A.8. Equilibrium of a magnetic star
A star contains an axisymmetric and purely toroidal magnetic field B = B(r, z) eφ,where (r, φ, z) are cylindrical polar coordinates. Show that the equation of magnetostaticequilibrium can be written in the form
0 = −ρ∇Φ−∇p− B
µ0r∇(rB). (A 10)
Assuming that the equilibrium is barotropic such that ∇p is everywhere parallel to ∇ρ,show that the magnetic field must be of the form
B =1
rf(r2ρ), (A 11)
where f is an arbitrary function. Sketch the topology of the contour lines of r2ρ in a starand show that a magnetic field of this form is confined to the interior.
A.9. Force-free magnetic fields
(a) Show that an axisymmetric force-free magnetic field satisfies
Bφ =f(ψ)
r, (A 12)
where ψ is the poloidal magnetic flux function, r is the cylindrical radius and f is anarbitrary function. Show also that ψ satisfies the equation
r2∇ · (r−2∇ψ) + f
df
dψ= 0. (A 13)
(b) Let V be a fixed volume bounded by a surface S. Show that the rate of change ofthe magnetic energy in V is
1
µ0
∫
S
[(u ·B)B −B2u] · dS −∫
V
u · Fm dV, (A 14)
where Fm is the Lorentz force per unit volume. If V is an axisymmetric volume containing

Astrophysical fluid dynamics 83
a magnetic field that remains axisymmetric and force-free, and if the velocity on S consistsof a differential rotation u = rΩ(r, z) eφ, deduce that the instantaneous rate of changeof the magnetic energy in V is
2π
µ0
∫
f(ψ)∆Ω(ψ) dψ, (A 15)
where ∆Ω(ψ) is the difference in angular velocity of the two endpoints on S of the fieldline labelled by ψ, and the range of integration is such as to cover S once.
A.10. Helicity
The magnetic helicity in a volume V is
Hm =
∫
V
A ·B dV. (A 16)
A thin, untwisted magnetic flux tube is a thin tubular structure consisting of the neigh-bourhood of a smooth curve C, such that the magnetic field is confined within the tubeand is parallel to C.
(a) Consider a simple example of a single, closed, untwisted magnetic flux tube suchthat
B = B(r, z) eφ, (A 17)
where (r, φ, z) are cylindrical polar coordinates and B(r, z) is a positive function localizednear (r = a, z = 0). The tube is contained entirely within V . Show that the magnetichelicity of this field is uniquely defined and equal to zero.
(b) Use the fact that Hm is conserved in ideal MHD to argue that the magnetic helicityof any single, closed, untwisted and unknotted flux tube contained within V is also zero.
(c) Consider a situation in which V contains two such flux tubes T1 and T2. Let F1
and F2 be the magnetic fluxes associated with T1 and T2. By writing B = B1+B2, etc.,and assuming that the tubes are thin, show that
Hm = ±2F1F2 (A 18)
if the tubes are simply interlinked, while Hm = 0 if they are unlinked.
A.11. Variational principles
The magnetic energy in a volume V bounded by a surface S is
Em =
∫
V
B2
2µ0dV. (A 19)
(a) Making use of the representation B = ∇ ×A of the magnetic field in terms of amagnetic vector potential, show that the magnetic field that minimizes Em, subject tothe tangential components of A being specified on S, is a potential field. Argue that thisconstraint corresponds to specifying the normal component of B on S.
(b) Making use of the representation B = ∇α× ∇β of the magnetic field in termsof Euler potentials, show that the magnetic field that minimizes Em, subject to α andβ being specified on S, is a force-free field. Argue that this constraint corresponds tospecifying the normal component of B on S and also the way in which points on S areconnected by magnetic field lines.

84 Gordon I. Ogilvie
A.12. Friedrichs diagrams
The dispersion relations ω(k) for Alfven and magnetoacoustic waves in a uniform mediumare given by
v2p = v2a cos2 θ, (A 20)
v4p − (v2s + v2a)v2p + v2s v
2a cos
2 θ = 0, (A 21)
where vp = ω/k is the phase velocity and θ is the angle between k and B. Use the formof vp(θ) for each mode to calculate the group velocities vg = ∂ω/∂k, determining theircomponents parallel and perpendicular to B.Sketch the phase and group diagrams by tracking vp = vpk and vg, respectively, over
the full range of θ. Treat the cases vs > va and vs < va separately. By analysing thelimit θ → π/2, show that the group diagram for the slow wave has a cusp at speedvsva(v
2s + v2a)
−1/2.
A.13. Shock relations
The Rankine–Hugoniot relations in the rest frame of a non-magnetic shock are
[ρux]21 = 0, (A 22)
[ρu2x + p]21 = 0, (A 23)
[ρux(12u
2x + h)]21 = 0, (A 24)
where ux > 0 and [Q]21 = Q2−Q1 is the difference between the downstream and upstreamvalues of any quantity Q. Show that the velocity, density and pressure ratios
U =u2u1, D =
ρ2ρ1, P =
p2p1
(A 25)
across a shock in a perfect gas are given by
D =1
U=
(γ + 1)M21
(γ − 1)M21 + 2
, P =2γM2
1 − (γ − 1)
(γ + 1), (A 26)
where M = ux/vs is the Mach number, and also that
M22 =
(γ − 1)M21 + 2
2γM21 − (γ − 1)
. (A 27)
Show that the entropy change in passing through the shock is given by
[s]21cv
= lnP − γ ln
[
(γ + 1)P + (γ − 1)
(γ − 1)P + (γ + 1)
]
(A 28)
and deduce that only compression shocks (D > 1, P > 1) are physically realizable.
A.14. Oblique shocks
For a hydrodynamic shock, let uX2 and uY 2 be the downstream velocity componentsparallel and perpendicular, respectively, to the upstream velocity vector u1. In the limitof a strong shock, M1 ≫ 1, derive the relation
u2Y 2 = (|u1| − uX2)
[
uX2 −(
γ − 1
γ + 1
)
|u1|]
. (A 29)
Sketch this relation in the (uX2, uY 2) plane. Hence show that the maximum angle throughwhich the velocity vector can be deflected on passing through a stationary strong shockis arcsin(1/γ).

Astrophysical fluid dynamics 85
A.15. The Riemann problem
A perfect gas flows in one dimension in the absence of boundaries, gravity and magneticfields.
(a) Determine all possible smooth local solutions of the equations of one-dimensionalgas dynamics that depend only on the variable ξ = x/t for t > 0. Show that one suchsolution is a rarefaction wave in which du/dξ = 2/(γ + 1). How do the adiabatic soundspeed and specific entropy vary with ξ?
(b) At t = 0 the gas is initialized with uniform density ρL, pressure pL and velocityuL in the region x < 0 and with uniform density ρR, pressure pR and velocity uR inthe region x > 0. Explain why the subsequent flow is of the similarity form describedin part (a). What constraints must be satisfied by the initial values if the subsequentevolution is to involve only two uniform states connected by a rarefaction wave? Give anon-trivial example of such a solution.
(c) Explain why, for more general choices of the initial values, the solution cannot havethe simple form described in part (b), even if uR > uL. What other features will appearin the solution? (Detailed calculations are not required.)
A.16. Nonlinear waves in incompressible MHD
Show that the equations of ideal MHD in the case of an incompressible fluid of uniformdensity ρ can be written in the symmetrical form
∂z±
∂t+ z∓ · ∇z± = −∇ψ, (A 30)
∇ · z± = 0, (A 31)
where
z± = u± va (A 32)
are the Elsasser variables, va = (µ0ρ)−1/2B is the vector Alfven velocity, and ψ =
Φ + (Π/ρ) is a modified pressure.Consider a static basic state in which the magnetic field is uniform and ψ = constant.
Write down the exact equations governing perturbations (z′±, ψ
′) (i.e. without performinga linearization). Hence show that there are special solutions in which disturbances ofarbitrary amplitude propagate along the magnetic field lines in one direction or otherwithout change of form. How do these relate to the MHD wave modes of a compressiblefluid? Why does the general argument for wave steepening not apply to these nonlinearsimple waves?
A.17. Spherical blast waves
A supernova explosion of energy E occurs at time t = 0 in an unmagnetized perfect gasof adiabatic exponent γ. The surrounding medium is initially cold and has non-uniformdensity Cr−β , where C and β are constants (with 0 < β < 3) and r is the distance fromthe supernova.
(a) Explain why a self-similar spherical blast wave may be expected to occur, anddeduce that the radius R(t) of the shock front increases as a certain power of t.
(b) Write down the self-similar form of the velocity, density and pressure for 0 < r <R(t) in terms of three undetermined dimensionless functions of ξ = r/R(t). Obtain asystem of dimensionless ordinary differential equations governing these functions, and

86 Gordon I. Ogilvie
formulate the boundary conditions on the dimensionless functions at the strong shockfront ξ = 1.
(c) Show that special solutions exist in which the radial velocity and the density areproportional to r for r < R(t), if
β =7− γ
γ + 1. (A 33)
For the case γ = 5/3 express the velocity, density and pressure for this special solutionin terms of the original dimensional variables.
A.18. Accretion on to a black hole
Write down the equations of steady, spherical accretion of a perfect gas in an arbitrarygravitational potential Φ(r).Accretion on to a black hole can be approximated within a Newtonian theory by using
the Paczynski–Wiita potential
Φ = − GM
r − rh, (A 34)
where rh = 2GM/c2 is the radius of the event horizon and c is the speed of light.Show that the sonic radius rs is related to rh and the nominal accretion radius ra =
GM/2v2s0 (where vs0 is the sound speed at infinity) by
2r2s − [(5 − 3γ)ra + 4rh] rs + 2r2h − 4(γ − 1)rarh = 0. (A 35)
Argue that the accretion flow passes through a unique sonic point for any value of γ > 1.Assuming that vs0 ≪ c, find approximations for rs in the cases (i) γ < 5/3, (ii) γ = 5/3and (iii) γ > 5/3.
A.19. Spherical flow in a power-law potential
For steady, spherically symmetric, adiabatic flow in a gravitational potential Φ = −Ar−β ,where A and β are positive constants, show that a necessary condition for either (i) aninflow that starts from rest at r = ∞ or (ii) an outflow that reaches r = ∞ to passthrough a sonic point is
γ < f(β), (A 36)
where γ > 1 is the adiabatic exponent and f(β) is a function to be determined.Assuming that this condition is satisfied, calculate the accretion rate of a transonic
accretion flow in terms of A, β, γ and the density and sound speed at r = ∞. Evaluateyour expression in each of the limits γ → 1 and γ → f(β). (You may find it helpful todefine δ = γ − 1.)
A.20. Rotating outflows
The wind from a rotating star can be modelled as a steady, axisymmetric, adiabatic flowin which the magnetic field is neglected. Let ψ(r, z) be the mass flux function, such that
ρup = ∇ψ×∇φ, (A 37)
where (r, φ, z) are cylindrical polar coordinates and up is the poloidal part of the velocity.Show that the specific entropy, the specific angular momentum and the Bernoulli functionare constant along streamlines, giving rise to three functions s(ψ), ℓ(ψ) and ε(ψ). Use theremaining dynamical equation to show that ψ satisfies the partial differential equation
1
ρ∇ ·
(
1
ρr2∇ψ
)
=dε
dψ− T
ds
dψ− ℓ
r2dℓ
dψ. (A 38)

Astrophysical fluid dynamics 87
A.21. Critical points of magnetized outflows
The integrals of the equations of ideal MHD for a steady axisymmetric outflow are
u =kB
ρ+ rω eφ, (A 39)
uφ − Bφ
µ0k=ℓ
r, (A 40)
s = s(ψ), (A 41)
12 |u− rω eφ|2 +Φ− 1
2r2ω2 + h = ε, (4)
where k(ψ), ω(ψ), ℓ(ψ), s(ψ) and ε(ψ) are surface functions. Assume that the magneticflux function ψ(r, z) is known from a solution of the Grad–Shafranov equation, and letthe cylindrical radius r be used as a parameter along each magnetic field line. Then thepoloidal magnetic field Bp = ∇ψ × ∇φ is a known function of r on each field line.Assume further that the surface functions k(ψ), ω(ψ), ℓ(ψ), s(ψ) and ε(ψ) are known.Show that equations (A 39)–(A 41) can then be used, in principle, and together with
the equation of state, to determine the velocity u and the specific enthalpy h as functionsof ρ and r on each field line. Deduce that equation (4) has the form
f(ρ, r) = ε = constant (A 42)
on each field line.Show that
− ρ∂f
∂ρ=u4p − (v2s + v2a)u
2p + v2s v
2ap
u2p − v2ap, (A 43)
where vs is the adiabatic sound speed, va is the (total) Alfven speed and the subscript‘p’ denotes the poloidal (meridional) component. Deduce that the flow has critical pointswhere up equals the phase speed of axisymmetric fast or slow magnetoacoustic waves.What condition must be satisfied by ∂f/∂r for the flow to pass through these criticalpoints?
A.22. Radial oscillations of a star
Show that purely radial (i.e. spherically symmetric) oscillations of a spherical star satisfythe Sturm–Liouville equation
d
dr
[
γp
r2d
dr(r2ξr)
]
− 4
r
dp
drξr + ρω2ξr = 0. (A 44)
How should ξr behave near the centre of the star and near the surface r = R at whichp = 0?Show that the associated variational principle can be written in the equivalent forms
ω2
∫ R
0
ρ|ξr|2 r2 dr =∫ R
0
[
γp
r2
∣
∣
∣
∣
d
dr(r2ξr)
∣
∣
∣
∣
2
+ 4rdp
dr|ξr|2
]
dr
=
∫ R
0
[
γpr4∣
∣
∣
∣
d
dr
(
ξrr
)∣
∣
∣
∣
2
+ (4− 3γ)rdp
dr|ξr |2
]
dr,
(A 45)
where γ is assumed to be independent of r. Deduce that the star is unstable to purelyradial perturbations if and only if γ < 4/3. Why does it not follow from the first form ofthe variational principle that the star is unstable for all values of γ?Can you reach the same conclusion using only the virial theorem?

88 Gordon I. Ogilvie
A.23. Waves in an isothermal atmosphere
Show that linear waves of frequency ω and horizontal wavenumber kh in a plane-parallelisothermal atmosphere satisfy the equation
d2ξzdz2
− 1
H
dξzdz
+(γ − 1)
γ2H2ξz + (ω2 −N2)
(
1
v2s− k2hω2
)
ξz = 0, (A 46)
where H is the isothermal scale-height, N is the Brunt–Vaisala frequency and vs is theadiabatic sound speed.Consider solutions of the vertically wavelike form
ξz ∝ ez/2H exp(ikzz), (A 47)
where kz is real, so that the wave energy density (proportional to ρ|ξ|2) is independentof z. Obtain the dispersion relation connecting ω and k. Assuming that N2 > 0, showthat propagating waves exist in the limits of high and low frequencies, for which
ω2 ≈ v2s k2 (acoustic waves) and ω2 ≈ N2k2h
k2(gravity waves) (A 48)
respectively. Show that the minimum frequency at which acoustic waves propagate isvs/2H .Explain why the linear approximation must break down above some height in the
atmosphere.
A.24. Gravitational instability of a slab
An isothermal ideal gas of sound speed cs forms a self-gravitating slab in hydrostaticequilibrium with density ρ(z), where (x, y, z) are Cartesian coordinates.
(a) Verify that
ρ ∝ sech2( z
H
)
, (A 49)
and relate the scalehheight H to the surface density
Σ =
∫ ∞
−∞
ρ dz. (A 50)
(b) Assuming that the perturbations are also isothermal, derive the linearized equationsgoverning displacements of the form
Re[
ξ(z) ei(kx−ωt)]
, (A 51)
where k is a real wavenumber. Show that ω2 is real for disturbances satisfying appropriateconditions as |z| → ∞.
(c) For a marginally stable mode with ω2 = 0, derive the associated Legendre equation
d
dτ
[
(1− τ2)d δΦ
dτ
]
+
(
2− ν2
1− τ2
)
δΦ = 0, (A 52)
where τ = tanh(z/H), ν = kH and δΦ is the Eulerian perturbation of the gravitationalpotential. Verify that two solutions of this equation are
(
1 + τ
1− τ
)ν/2
(ν − τ) and
(
1− τ
1 + τ
)ν/2
(ν + τ). (A 53)
Deduce that the marginally stable mode has |k| = 1/H and δΦ ∝ sech(z/H). Would youexpect the unstable modes to have wavelengths greater or less than 2πH?

Astrophysical fluid dynamics 89
A.25. Magnetic buoyancy instabilities
A perfect gas forms a static atmosphere in a uniform gravitational field −g ez, where(x, y, z) are Cartesian coordinates. A horizontal magnetic field B(z) ey is also present.Derive the linearized equations governing small displacements of the form
Re [ξ(z) exp(−iωt+ ikxx+ ikyy)] , (A 54)
where kx and ky are real horizontal wavenumbers, and show that
ω2
∫ b
a
ρ|ξ|2 dz = [ξ∗z δΠ]ba
+
∫ b
a
|δΠ|2γp+ B2
µ0
−
∣
∣
∣ρgξz +B2
µ0ikyξy
∣
∣
∣
2
γp+ B2
µ0
+B2
µ0k2y|ξ|2 − g
dρ
dz|ξz |2
dz,
(A 55)
where z = a and z = b are the lower and upper boundaries of the atmosphere, and δΠ isthe Eulerian perturbation of total pressure. (Self-gravitation may be neglected.)You may assume that the atmosphere is unstable if and only if the integral on the
right-hand side can be made negative by a trial displacement ξ satisfying the boundaryconditions, which are such that [ξ∗z δΠ]
ba = 0. You may also assume that the horizontal
wavenumbers are unconstrained. Explain why the integral can be minimized with respectto ξx by letting ξx → 0 and kx → ∞ in such a way that δΠ = 0.Hence show that the atmosphere is unstable to disturbances with ky = 0 if and only if
− d ln ρ
dz<
ρg
γp+ B2
µ0
(A 56)
at some point.Assuming that this condition is not satisfied anywhere, show further that the atmo-
sphere is unstable to disturbances with ky 6= 0 if and only if
− d ln ρ
dz<ρg
γp(A 57)
at some point.How does these stability criteria compare with the hydrodynamic stability criterion
N2 < 0?
A.26. Waves in a rotating fluid
Write down the equations of ideal gas dynamics in cylindrical polar coordinates (r, φ, z),assuming axisymmetry. Consider a steady, axisymmetric basic state in uniform rotation,with density ρ(r, z), pressure p(r, z) and velocity u = rΩ eφ. Determine the linearizedequations governing axisymmetric perturbations of the form
Re[
δρ(r, z) e−iωt]
, (A 58)
etc. If the basic state is homentropic and self-gravity may be neglected, show that thelinearized equations reduce to
− iω δur − 2Ω δuφ = −∂W∂r
, (A 59)
− iω δuφ + 2Ω δur = 0, (A 60)
− iω δuz = −∂W∂z
, (A 61)

90 Gordon I. Ogilvie
− iωW +v2sρ
[
1
r
∂
∂r(rρ δur) +
∂
∂z(ρ δuz)
]
= 0, (A 62)
where W = δp/ρ.
Eliminate δu to obtain a second-order partial differential equation for W . Is the equa-tion of elliptic or hyperbolic type? What are the relevant solutions of this equation if thefluid has uniform density and fills a cylindrical container r < a, 0 < z < H with rigidboundaries?
Appendix B. Electromagnetic units
These lecture notes use rationalized units for electromagnetism, such that Maxwell’sequations take the form
∂B
∂t= −∇×E, ∇·B = 0, ∇×B = µ0
(
J + ǫ0∂E
∂t
)
, ∇·E =ρeǫ0. (B 1)
These involve the vacuum permeability and permittivity µ0 and ǫ0, related to the speedof light c by c = (µ0ǫ0)
−1/2, but do not involve factors of 4π or c.
In astrophysics it is common to use Gaussian units for electromagnetism, such thatMaxwell’s equations take the form
∂B
∂t= −c∇×E, ∇ ·B = 0, ∇×B =
1
c
(
4πJ +∂E
∂t
)
, ∇ ·E = 4πρe.
(B 2)In the limit relevant for Newtonian MHD, the ∂E/∂t term is neglected. Different factorsthen appear in several related equations. The magnetic energy density in Gaussian unitsis
B2
8πrather than
B2
2µ0, (B 3)
the electromagnetic energy flux density (Poynting vector) is
c
4πE ×B rather than
E ×B
µ0, (B 4)
the Maxwell stress is
1
4π
(
BB − B2
2I
)
rather than1
µ0
(
BB − B2
2I
)
, (B 5)
and the Lorentz force is
1
cJ ×B =
1
4π(∇ ×B)×B rather than J ×B =
1
µ0(∇ ×B)×B. (B 6)
The perfectly conducting fluid approximation of ideal MHD corresponds to
E = −1
cu×B rather than E = −u×B. (B 7)
The fields E, B and J can be converted from rationalized to Gaussian units by re-

Astrophysical fluid dynamics 91
placing
E 7→(
1
4πǫ0
)1/2
E = c(µ0
4π
)1/2
E,
B 7→(µ0
4π
)1/2
B,
J 7→ (4πǫ0)1/2J =
1
c
(
4π
µ0
)1/2
J .
(B 8)
For historical reasons, rationalized electromagnetic units are associated with the MKS(metre–kilogram–second) system of mechanical units, while Gaussian electromagneticunits are associated with the CGS (centimetre–gram–second) system. The most commonsystem of rationalized units is SI units, in which µ0 has the exact value 4π × 10−7 (inunits of NA−2 or Hm−1). In principle, rationalized units can be used within CGS, inwhich case µ0 has the value 4π.
Appendix C. Summary of notation
A: poloidal Alfven numberAi: matrix describing hyperbolic structureA: magnetic vector potentiala: particle acceleration; initial position vectorB: Bernoulli constantB: magnetic fieldBp: poloidal magnetic fieldCij : cofactor of deformation tensorc: speed of light; velocity dispersioncp: specific heat capacity at constant pressurecs: isothermal sound speedcv: specific heat capacity at constant volumeD/Dt: Lagrangian time-derivativeE: electric fielde: specific internal energye: basis (unit) vectorF : determinant of deformation tensorFij : deformation tensorF : flux density of conserved quantityFm: Lorentz force per unit volumeF : force operatorf : distribution functionfM: Maxwellian distribution functionG: Newton’s constantGij : inverse of deformation tensorg: gravitational accelerationg: gravitational fieldH : Heaviside step function; scale heightHc: cross helicityHk: kinetic helicityHm: magnetic helicityh: specific enthalpy

92 Gordon I. Ogilvie
I: trace of inertia tensor; moment of inertiaIij : inertia tensorI: unit tensorJ : Jacobian determinantJ0, J1: Bessel functionsJij : Jacobian matrixJ : electric current densityK: polytropic constant; kinetic energyKij : kinetic energy tensork: Boltzmann’s constant; wavenumber; mass loading; potential Love numberk: wavevectorL: characteristic length-scale; LagrangianL: Lagrangian densityℓ: angular momentum invariant; specific angular momentumM : magnetic energy; massM: Maxwell stress tensorM: Mach numberm: particle massmH: mass of hydrogen atomN : buoyancy frequencyn: number of degrees of freedom; number densityn: unit normal vectorp: pressurepg: gas pressurepm: magnetic pressurepr: radiation pressureq: electric charge; density of conserved quantityR: shock radiusR±: Riemann invariantsr: cylindrical radius; spherical radiusr0: footpoint radiusra: Alfven radiusrs: sonic radiusS: bounding surface; actions: specific entropyT : temperature; characteristic time-scale; torqueTm: magnetic tensionT: stress tensorT : trace of integrated stress tensorTij : integrated stress tensort: timeU : internal energyU: state vectorush: shock speedu: velocity fieldV : volume (occupied by fluid)V : exterior volumeVij : second-rank potential energy tensorVijkl : fourth-rank potential energy tensorv: specific volume; wave speed

Astrophysical fluid dynamics 93
vs: adiabatic sound speedv: particle velocity; relative velocity of framesva: Alfven velocityvg: group velocityvp: phase velocityW : gravitational energy; potential energy functionalx: Cartesian coordinatex: position vectorY : spherical harmonicy: Cartesian coordinatez: Cartesian coordinateβ: plasma betaΓ1: first adiabatic exponentγ: ratio of specific heats; adiabatic exponent∆: Lagrangian perturbation; divergence of displacementδ: Eulerian perturbation; Dirac delta functionδm: material mass elementδS: material surface elementδu: velocity difference; velocity perturbationδV : material volume elementδx: material line elementδΦ: material flux elementǫijk: Levi–Civita tensorε: energy invariantη: secondary displacementθ: polar angle; angle between wavevector and magnetic fieldλ: mean free path; force-free field scalar; scaling parameterµ: mean molecular weight; scaling parameterµ0: vacuum permeabilityξ: similarity variableξ: (Lagrangian) displacementΠ: total pressureρ: mass densityρe: charge densityσ: Stefan’s constant; collisional cross-sectionτ : relaxation timeΦ: gravitational potentialΦe: electrostatic potentialΦext: external gravitational potentialΦint: internal (self-) gravitational potentialφ: azimuthal angleϕ: phaseχ: scalar field in gauge transformationχρ: inverse isothermal compressibilityΨ: secondary gravitational potentialψ: magnetic flux functionΩ: angular velocityω: wave frequencyω: vorticity

94 Gordon I. Ogilvie
REFERENCES
Bondi, H. 1952 On spherically symmetrical accretion. Mon. Not. R. Astron. Soc. 112, 195–204.Bondi, H. 1960 Cosmology, 2nd ed. Cambridge University Press.Chandrasekhar, S. 1969 Ellipsoidal figures of equilibrium. Yale University Press.Lamb, H. 1932 Hydrodynamics, 6th ed. Cambridge University Press.Le Bellac, M. & Levy-Leblond, J. M. 1973 Galilean electromagnetism. Nuovo Cimento B
14, 217–234.Ogilvie, G. I. & Livio, M. 1998 On the difficulty of launching an outflow from an accretion
disk. Astrophys. J. 499, 329–339.Parker, E. N. 1958 Dynamics of the interplanetary gas and magnetic fields. Astrophys. J. 128,
664–676.
Related Documents