A Self-Supervised Terrain Roughness Estimator for Off-Road Autonomous Driving David Stavens and Sebastian Thrun Stanford Artificial Intelligence Lab

A Self-Supervised Terrain Roughness Estimator for Off-Road Autonomous Driving
Dec 31, 2015
A Self-Supervised Terrain Roughness Estimator for Off-Road Autonomous Driving. David Stavens and Sebastian Thrun Stanford Artificial Intelligence Lab. Self-Supervised Learning. “Combines” strengths of multiple sensors. Ultra-Precise , No Range. Precise, Long Range. Overview. - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A Self-Supervised Terrain Roughness Estimator for Off-Road Autonomous Driving
David Stavens and Sebastian Thrun
Stanford Artificial Intelligence Lab

David Stavens, Sebastian Thrun
Self-Supervised Learning
“Combines” strengths of multiple sensors.
Ultra-Precise, No Range Precise, Long Range

David Stavens, Sebastian Thrun
Overview
Introduction and Motivation Classifying Terrain Roughness Self-Supervised Learning Experimental Results

David Stavens, Sebastian Thrun
2005 DARPA Grand Challenge
David Stavens, Sebastian Thrun
Velocity Planning for DGC 2005
Mobile robotics traditionally focuses on steering.
But speed is also important.– Beyond stopping distance and lateral maneuverability.
For Grand Challenge 2005, our vehicle adapted its speed to terrain conditions, minimizing shock:– Increases electrical and mechanical reliability.– Mitigates pose error for laser projection.– Increases traction for improved maneuvers.– Seems to be correlated with slowing on “hard” terrain.

David Stavens, Sebastian Thrun
Velocity Planning for DGC 2005
Simple three state algorithm:– Drive at speed limit until shock threshold exceeded.– Slow to bring the vehicle within the shock threshold.
• Uses approx. linear relationship between shock and speed.• Which is also important for the new work we present.
– Accelerate back to the speed limit.
Discontinuous control problem.– Hard to solve with conventional control approaches.
We used supervised learning.

David Stavens, Sebastian Thrun
Experiments for DGC 05

David Stavens, Sebastian Thrun
This Talk: Next Logical Step
We expand our online approach to be proactive.– Our previous approach was entirely reactive.
Difficult to be that precise with laser scanners.– Hence problems of uncertainty and learning.
Accuracy required for roughness detection exceeds that required for obstacle avoidance.– 15cm vs. 2-4cm
David Stavens, Sebastian Thrun
Other Approaches to Velocity Control
Terramechanics: guidance through rough terrain.– Online assessment only at low speeds.– High speeds require a priori maps.
Our approach is both online and at high speeds.– Speeds up to 35 mph.

David Stavens, Sebastian Thrun
CMU’s Preplanning Trailer
David Stavens, Sebastian Thrun
Overview
Introduction and Motivation Classifying Terrain Roughness Self-Supervised Learning Experimental Results

David Stavens, Sebastian Thrun
Acquiring a 3D Point Cloud
David Stavens, Sebastian Thrun
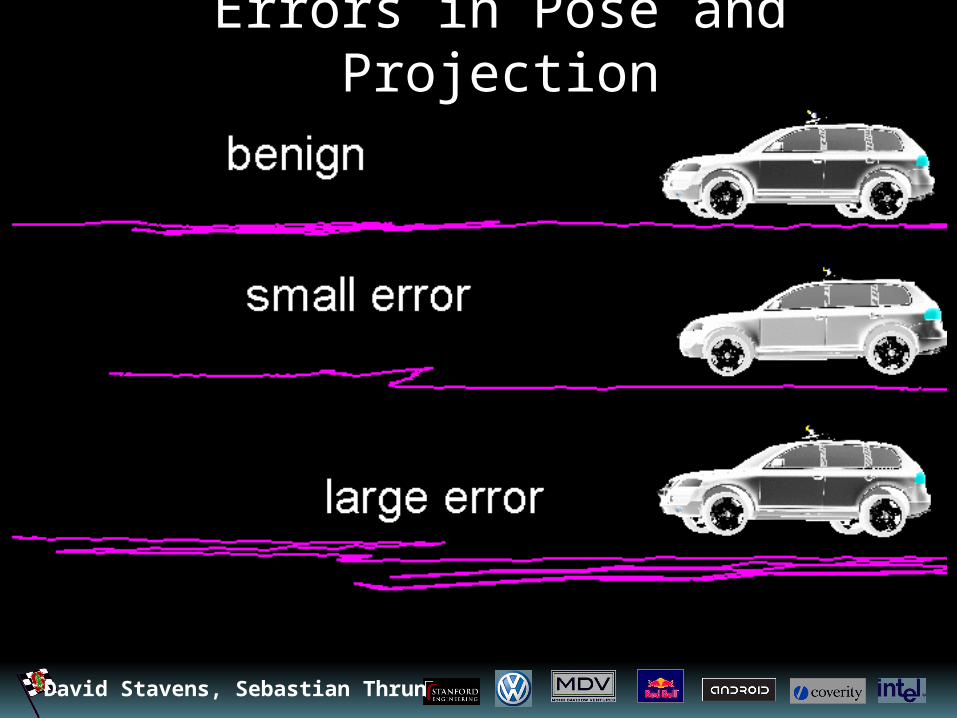
Errors in Pose and Projection
David Stavens, Sebastian Thrun
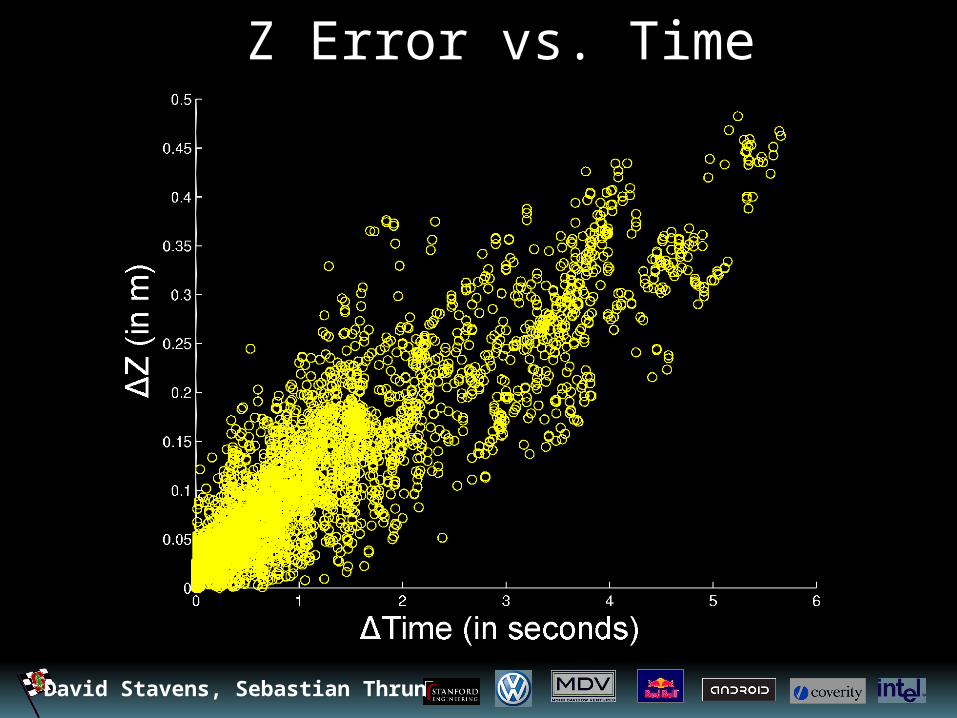
Z Error vs. Time

David Stavens, Sebastian Thrun
More than t
“Spread” of plot implies more factors than t.
t is also related to:– Amount/rate of pitching.– Distance between the two scans.
David Stavens, Sebastian Thrun
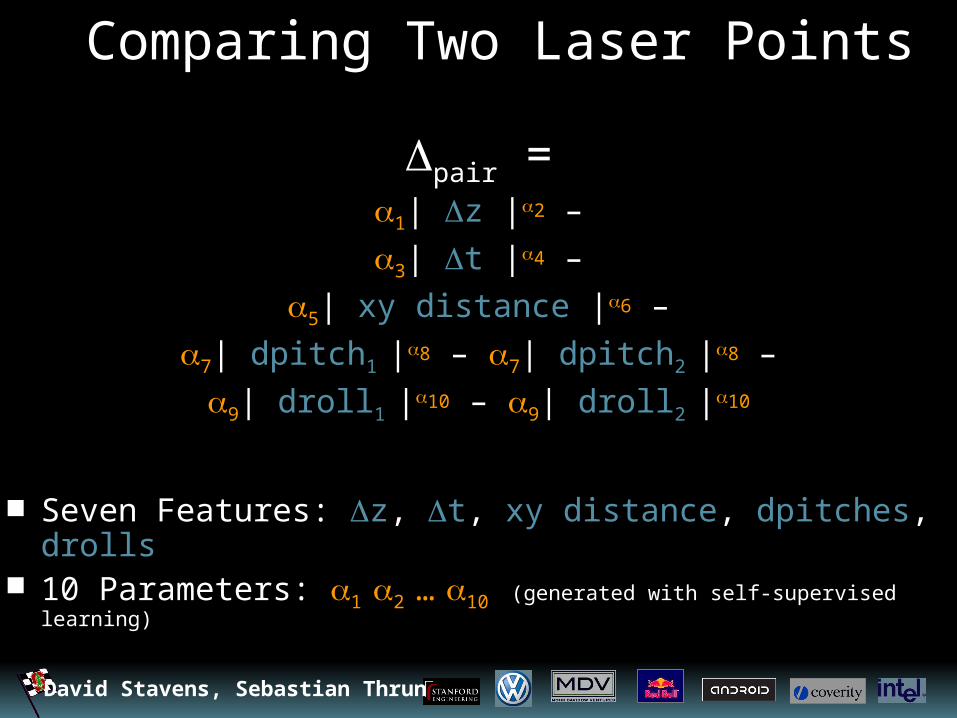
Comparing Two Laser Points
pair =1| z |2 –
3| t |4 –
5| xy distance |6 –
7| dpitch1 |8 – 7| dpitch2 |8 –
9| droll1 |10 – 9| droll2 |10
Seven Features: z, t, xy distance, dpitches, drolls 10 Parameters: 1 2 … 10 (generated with self-supervised learning)

David Stavens, Sebastian Thrun
Combining Multiple Comparisons
n pairs in ascending order.– Use weighting because resolution of discontinuities is near
resolution of laser. There are not many witness pairs.
n
R = pair 11i
i = 0
This generates a score, R, for that patch of terrain.
But how do we assign target values to R?

David Stavens, Sebastian Thrun
Overview
Introduction and Motivation Classifying Terrain Roughness Self-Supervised Learning Experimental Results

David Stavens, Sebastian Thrun
Self-Supervised Learning
Actual shock when driving over terrain modifies belief about original laser scan.
Improves classifier for subsequent scans!

David Stavens, Sebastian Thrun
Caveat: Must Correct for Speed
David Stavens, Sebastian Thrun
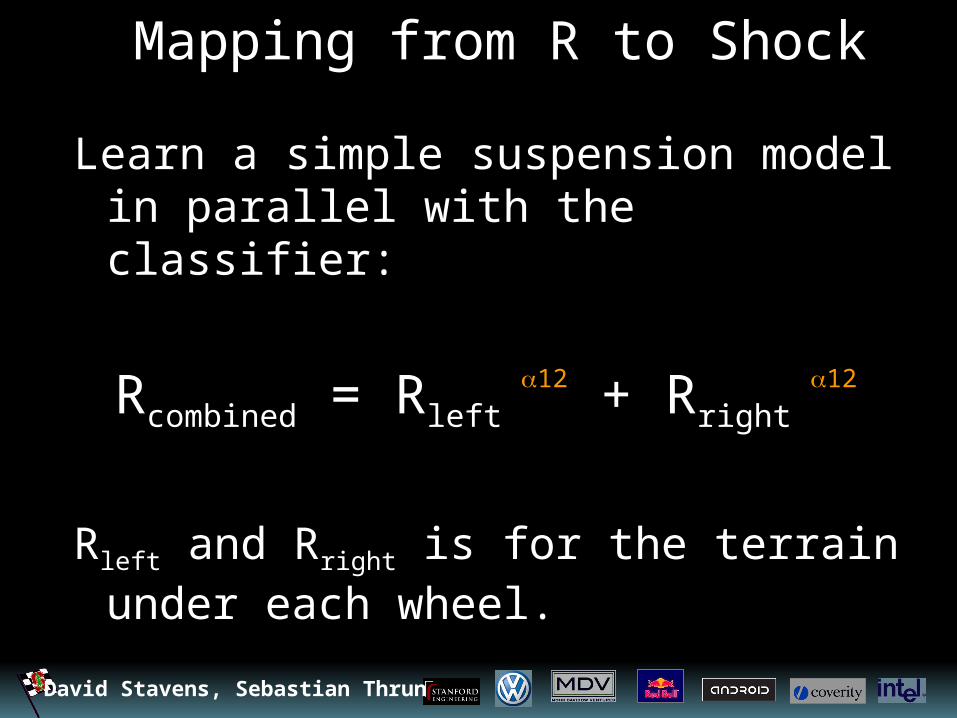
Mapping from R to Shock
Learn a simple suspension model in parallel with the classifier:
Rcombined = Rleft 12 + Rright
12
Rleft and Rright is for the terrain under each wheel.

David Stavens, Sebastian Thrun
Overview
Introduction and Motivation Classifying Terrain Roughness Self-Supervised Learning Experimental Results
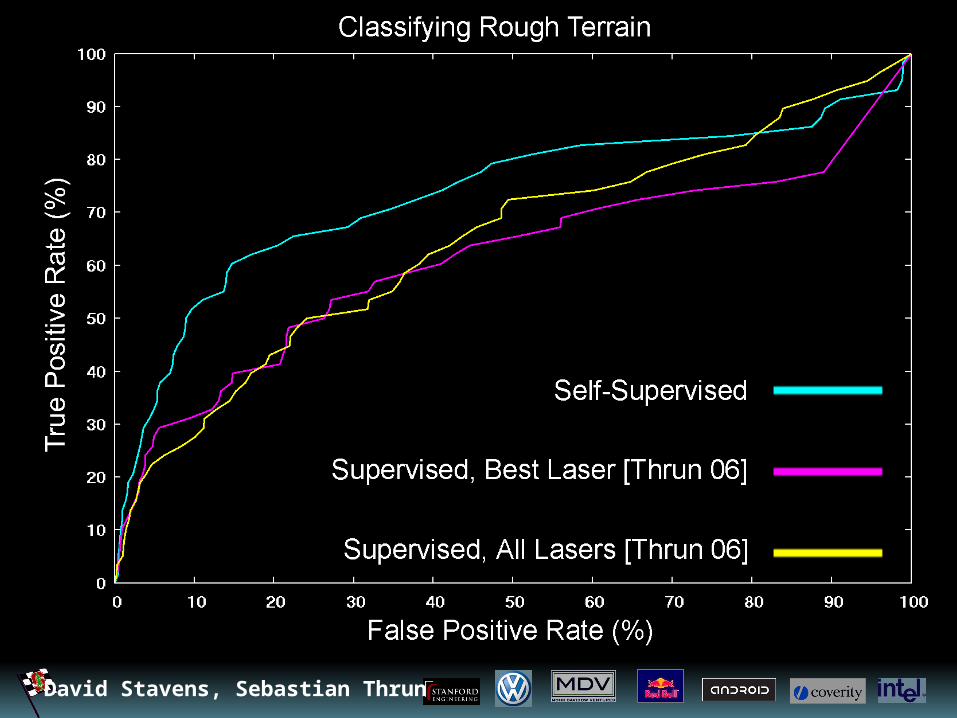
David Stavens, Sebastian Thrun
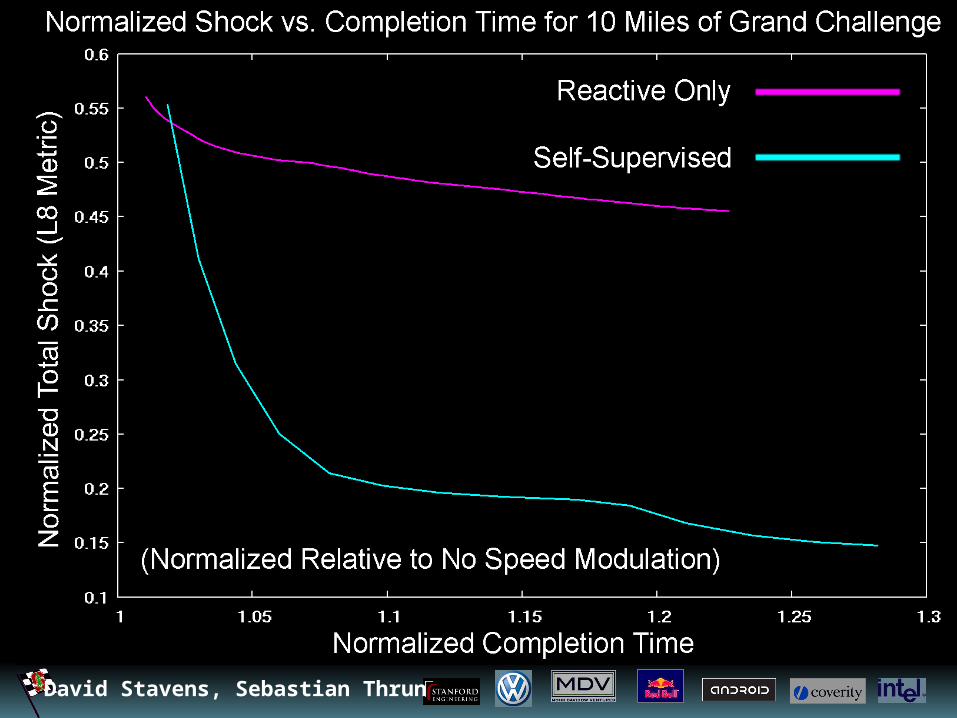
David Stavens, Sebastian Thrun
David Stavens, Sebastian Thrun
Summary
Road shock provides ground truth for previously perceived patches of road.
Perception model improves in real-time.
Future terrain assessment is more precise.
A faster route completion time is possible.– For the same amount of shock.
Works either “offline” or “as you drive.”– Offline results presented.

David Stavens, Sebastian Thrun
Questions?
Related Documents