Research Article A Novel Sigma-Delta Modulator with Fractional-Order Digital Loop Integrator Chi Xu, 1 Yu Jin, 1 and Duli Yu 2 1 College of Information Science and Technology, Beijing University of Chemical Technology, Beijing, China 2 Advanced Innovation Center for Soſt Matter, Beijing University of Chemical Technology, Beijing, China Correspondence should be addressed to Yu Jin; [email protected] Received 11 August 2017; Accepted 2 October 2017; Published 31 October 2017 Academic Editor: Anna Vila Copyright © 2017 Chi Xu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is paper proposes using a fractional-order digital loop integrator to improve the robust stability of Sigma-Delta modulator, thus extending the integer-order Sigma-Delta modulator to a non-integer-order (fractional-order) one in the Sigma-Delta ADC design field. e proposed fractional-order Sigma-Delta modulator has reasonable noise characteristics, dynamic range, and bandwidth; moreover the signal-to-noise ratio (SNR) is improved remarkably. In particular, a 2nd-order digital loop integrator and a digital controller are combined to work as the fractional-order digital loop integrator, which is realized using FPGA; this will reduce the ASIC analog circuit layout design and chip testing difficulties. e parameters of the proposed fractional-order Sigma-Delta modulator are tuned by using swarm intelligent algorithm, which offers opportunity to simplify the process of tuning parameters and further improve the noise performance. Simulation results are given and they demonstrate the efficiency of the proposed fractional-order Sigma-Delta modulator. 1. Introduction Sigma-Delta modulator technology has been commonly used in various fields including inertial sensors, such as the MEMS accelerometer and gyroscope [1–3]. Sigma-Delta modulator not only converts analog signal to digital signal but also can suppress the quantization noise of bandwidth effectively. Most of Sigma-Delta modulators are used in closed-loop architect in terms of linearity, dynamic range, and band- width [4]. Considerable attention has been given to the issue of the MEMS accelerometer performance comparison between the low-order and high-order closed-loop Sigma- Delta modulators. Many literatures have pointed out that the low-order Sigma-Delta modulator yields better stability with simpler design parameters, but the performance in terms of noise level is unsatisfactory. By contrast, the high- order Sigma-Delta modulator has reasonable noise charac- teristics, dynamic range, and bandwidth, but its stability is not guaranteed. So, designing a Sigma-Delta modulator with high stability and outstanding performance is much desired to be researched. Recently, high-order Sigma-Delta modulator, which uses additional electronic integrator, has been designed [5]. However, the stability of the high-order Sigma-Delta modulator is affected by variations of the MEMS accelerometer parameters [6]. Previous work has mainly focused on using integer-order integrator as a loop integrator to form the high-order Sigma-Delta modulator to improve its SNR and noise performance [7]. In this paper, a novel Sigma-Delta modulator with the fractional-order digital loop integrator is discussed. e proposed novel Sigma-Delta modulator contains a fractional-order controller, which is able to provide the stability in the placement of fractional-type poles and zeros. Fractional-order calculus belongs to the branch of math- ematics, which is concerned with differentiations and inte- grations of non-integer-order [8, 9]. According to [10], the remarkable advantage of fractional-order integrator over its counterpart, the integer-order one, is that the stability and robustness of the fractional-order integrator are much stronger. At present, modeling real-world phenomena using fractional-order calculus has received great attention. As we all know, Sigma-Delta modulators that have been applied so Hindawi Mathematical Problems in Engineering Volume 2017, Article ID 9861383, 7 pages https://doi.org/10.1155/2017/9861383

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Research ArticleA Novel Sigma-Delta Modulator with Fractional-OrderDigital Loop Integrator
Chi Xu1 Yu Jin1 and Duli Yu2
1College of Information Science and Technology Beijing University of Chemical Technology Beijing China2Advanced Innovation Center for Soft Matter Beijing University of Chemical Technology Beijing China
Correspondence should be addressed to Yu Jin jinymailbucteducn
Received 11 August 2017 Accepted 2 October 2017 Published 31 October 2017
Academic Editor Anna Vila
Copyright copy 2017 Chi Xu et al This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper proposes using a fractional-order digital loop integrator to improve the robust stability of Sigma-Delta modulator thusextending the integer-order Sigma-Delta modulator to a non-integer-order (fractional-order) one in the Sigma-Delta ADC designfield The proposed fractional-order Sigma-Delta modulator has reasonable noise characteristics dynamic range and bandwidthmoreover the signal-to-noise ratio (SNR) is improved remarkably In particular a 2nd-order digital loop integrator and a digital119875119868120582119863120583 controller are combined to work as the fractional-order digital loop integrator which is realized using FPGA this will reducethe ASIC analog circuit layout design and chip testing difficulties The parameters of the proposed fractional-order Sigma-Deltamodulator are tuned by using swarm intelligent algorithm which offers opportunity to simplify the process of tuning parametersand further improve the noise performance Simulation results are given and they demonstrate the efficiency of the proposedfractional-order Sigma-Delta modulator
1 Introduction
Sigma-Deltamodulator technology has been commonly usedin various fields including inertial sensors such as theMEMSaccelerometer and gyroscope [1ndash3] Sigma-Delta modulatornot only converts analog signal to digital signal but alsocan suppress the quantization noise of bandwidth effectivelyMost of Sigma-Delta modulators are used in closed-looparchitect in terms of linearity dynamic range and band-width [4] Considerable attention has been given to theissue of the MEMS accelerometer performance comparisonbetween the low-order and high-order closed-loop Sigma-Delta modulators Many literatures have pointed out thatthe low-order Sigma-Delta modulator yields better stabilitywith simpler design parameters but the performance interms of noise level is unsatisfactory By contrast the high-order Sigma-Delta modulator has reasonable noise charac-teristics dynamic range and bandwidth but its stabilityis not guaranteed So designing a Sigma-Delta modulatorwith high stability and outstanding performance is muchdesired to be researched Recently high-order Sigma-Delta
modulator which uses additional electronic integrator hasbeen designed [5] However the stability of the high-orderSigma-Deltamodulator is affected by variations of theMEMSaccelerometer parameters [6] Previous work has mainlyfocused on using integer-order integrator as a loop integratorto form the high-order Sigma-Delta modulator to improveits SNR and noise performance [7] In this paper a novelSigma-Delta modulator with the fractional-order digital loopintegrator is discussed The proposed novel Sigma-Deltamodulator contains a fractional-order 119875119868120582119863120583 controllerwhich is able to provide the stability in the placement offractional-type poles and zeros
Fractional-order calculus belongs to the branch of math-ematics which is concerned with differentiations and inte-grations of non-integer-order [8 9] According to [10] theremarkable advantage of fractional-order integrator overits counterpart the integer-order one is that the stabilityand robustness of the fractional-order integrator are muchstronger At present modeling real-world phenomena usingfractional-order calculus has received great attention As weall know Sigma-Delta modulators that have been applied so
HindawiMathematical Problems in EngineeringVolume 2017 Article ID 9861383 7 pageshttpsdoiorg10115520179861383
2 Mathematical Problems in Engineering
far were all considered as integer-order modulators whereasthe proposed Sigma-Delta modulator with the fractional-order digital loop integrator combines some characteristicsof systems between the orders 119873 and (119873 + 1) Thereforewe will have more possibilities for an adjustment of thepoles or zeros of the noise-shaping integrator according tospecial requirements through changing the system orderas a real (not only integer) value In this paper a novelSigma-Delta modulator with the fractional-order digital loopintegrator is presented where the fractional-order digitalloop integrator is cascaded between the analog-front-endamplifier and the quantizer In detail a 2nd-order digitalintegrator is used to perform noise-shaping of quantizationnoise from the comparator to improve SNR and furthermorea digital 119875119868120582119863120583 controller is immediately in series with the2nd-order digital integrator to provide the weak or strongfractional-type poles or zeros to improve the robust stabilityfor the proposed fractional-order Sigma-Delta modulatorThe parameters of the proposed fractional-order digital loopintegrator are tuned by using particle swarm optimization(PSO) algorithm which is easy to optimize the digital loopintegrator parameters
The rest of this paper is organized as follows inSection 2 a generalized structure of Sigma-Delta modulatoris introduced in Section 3 the proposed fractional-orderSigma-Delta modulator is discussed then PSO algorithmfor fractional-order Sigma-Delta modulator is presented inSection 4 Simulation results of the proposed Sigma-Deltamodulator are demonstrated and analyzed in Section 5Finally conclusions are given in Section 6
2 Mathematical Model of the Sigma-DeltaModulator System
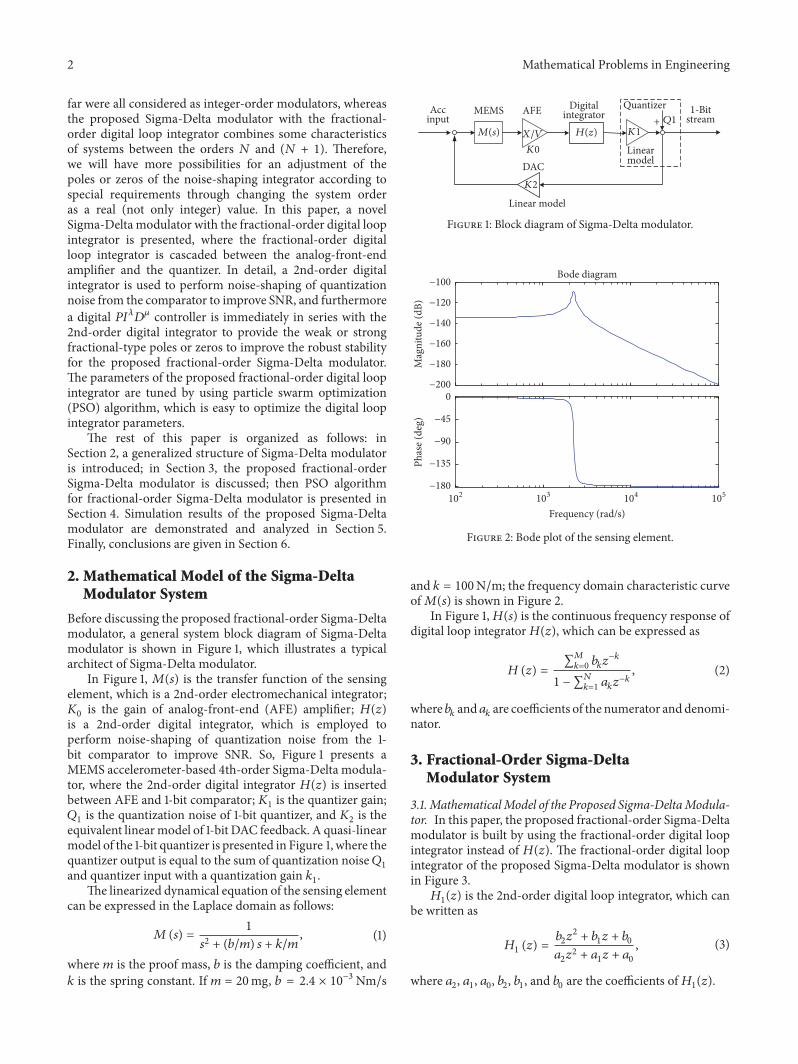
Before discussing the proposed fractional-order Sigma-Deltamodulator a general system block diagram of Sigma-Deltamodulator is shown in Figure 1 which illustrates a typicalarchitect of Sigma-Delta modulator
In Figure 1 119872(119904) is the transfer function of the sensingelement which is a 2nd-order electromechanical integrator1198700 is the gain of analog-front-end (AFE) amplifier 119867(119911)is a 2nd-order digital integrator which is employed toperform noise-shaping of quantization noise from the 1-bit comparator to improve SNR So Figure 1 presents aMEMS accelerometer-based 4th-order Sigma-Delta modula-tor where the 2nd-order digital integrator 119867(119911) is insertedbetween AFE and 1-bit comparator 1198701 is the quantizer gain1198761 is the quantization noise of 1-bit quantizer and 1198702 is theequivalent linearmodel of 1-bit DAC feedback A quasi-linearmodel of the 1-bit quantizer is presented in Figure 1 where thequantizer output is equal to the sum of quantization noise1198761and quantizer input with a quantization gain 1198961
The linearized dynamical equation of the sensing elementcan be expressed in the Laplace domain as follows
119872(119904) = 11199042 + (119887119898) 119904 + 119896119898 (1)
where 119898 is the proof mass 119887 is the damping coefficient and119896 is the spring constant If 119898 = 20mg 119887 = 24 times 10minus3Nms
XV
AFEMEMS
K0
M(s)
Accinput
1-Bitstream
Linear model
K2
K1Q1
Linearmodel
Digitalintegrator
H(z)
Quantizer
DAC
+
Figure 1 Block diagram of Sigma-Delta modulator
Phas
e (de
g)
Bode diagram
102 105103 104
Frequency (rads)
Mag
nitu
de (d
B)
minus200
minus180
minus160
minus140
minus120
minus100
minus180
minus135
minus90
minus45
0
Figure 2 Bode plot of the sensing element
and 119896 = 100Nm the frequency domain characteristic curveof119872(119904) is shown in Figure 2
In Figure 1119867(119904) is the continuous frequency response ofdigital loop integrator119867(119911) which can be expressed as
119867(119911) = sum119872119896=0 119887119896119911minus1198961 minus sum119873119896=1 119886119896119911minus119896 (2)
where 119887119896 and 119886119896 are coefficients of the numerator and denomi-nator
3 Fractional-Order Sigma-DeltaModulator System
31MathematicalModel of the Proposed Sigma-DeltaModula-tor In this paper the proposed fractional-order Sigma-Deltamodulator is built by using the fractional-order digital loopintegrator instead of 119867(119911) The fractional-order digital loopintegrator of the proposed Sigma-Delta modulator is shownin Figure 31198671(119911) is the 2nd-order digital loop integrator which canbe written as
1198671 (119911) = 11988721199112 + 1198871119911 + 119887011988621199112 + 1198861119911 + 1198860 (3)
where 1198862 1198861 1198860 1198872 1198871 and 1198870 are the coefficients of1198671(119911)
Mathematical Problems in Engineering 3
Digital integratorH1(z) H2(z)
2nd-orderintegrator
Fractional-ordercontroller
Figure 3Digital integrator of the proposed Sigma-Deltamodulator
1198672(119911) is the digital119875119868120582119863120583 controller which can bewrittenas
1198672 (119911) = 119870119901 + 119870119894 (119908 (119911minus1))minus120582 + 119870119889 (119908 (119911minus1))120583 (4)
where 120582 120583 and 119870119901 119870119894 and 119870119889 are the integral-orderdifferential-order and proportional integral and differentialcoefficients of1198672(119911) respectively
Here the architect of the proposed fractional-orderSigma-Delta modulator is presented in Figure 4
From the system model shown in Figure 4 the signaltransfer function (STF) and the noise transfer function(NTF119876
1
) of the proposed fractional-order Sigma-Delta mod-ulator can be written as
STF = 11987001198701119872(119904)1198671 (119904)1198672 (119904)1 + 119870011987011198702119872(119904)1198671 (119904)1198672 (119904) (5)
NTF1198761
= 11 + 119870011987011198702119872(119904)1198671 (119904)1198672 (119904) (6)
1198671(119904) and 1198672(119904) are the continuous frequency responses ofthe digital loop integrators 1198671(119911) and 1198672(119911) respectivelyTaking (3) and (4) in (5) and (6) STF NTF1198761 can be rewrittenas
STF = (119898 (1198700119870111987011988911988721199042+120582+120583 + 1198700119870111987011990111988721199042+120582+ 1198700119870111987011989411988721199042 + 119870011987011198701198891198870119904120582+120583 + 119870011987011198701199011199041+120582+ 119870011987011198701198941198871119904 + 11987001198701119870119901119904120582 + 119870011987011198701198941198870)) (11989811988611199044+120582+ (1198981198861 + 1198862119887) 1199043+120582 + 119898119871111988721199042+120582+120583 + (1198981198860 + 1198861119887+ 1198862119896 + 11989811987121198872) 1199042+120582 + 119898119871311988721199042 + 119871111988711199041+120582+120583 + (1198860119887+ 1198861119896 + 11989811987121198871) 1199041+120582 + 11987111198870119904120582+120583 + 11989811987131198871119904 + (1198860119896+ 11989811987121198870) 119904120582 + 11989811987131198870)minus1
NTF1198761 = (11989811988621199044+120582 + (1198862119887 + 1198861119898) 1199043+120582 + (1198862119896 + 1198861119887+ 1198981198860) 1199042+120582 + (1198861119896 + 1198860119887) 1199041+120582 + 119896119904120582) (11989811988611199044+120582+ (1198981198861 + 1198862119887) 1199043+120582 + 119898119871111988721199042+120582+120583 + (1198981198860 + 1198861119887+ 1198862119896 + 11989811987121198872) 1199042+120582 + 119898119871311988721199042 + 119871111988711199041+120582+120583 + (1198860119887+ 1198861119896 + 11989811987121198871) 1199041+120582 + 11987111198870119904120582+120583 + 11989811987131198871119904 + (1198860119896+ 11989811987121198870) 119904120582 + 11989811987131198870)minus1
(7)
where
1198711 = 1198700119870111987021198701198891198712 = 1198700119870111987021198701199011198713 = 119870011987011198702119870119894
(8)
To achieve high SNR and stability of the overall system1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 and 119896119889 in (7) will be optimized byusing PSO algorithm in the following section
32 Stability Analysis for the Proposed Sigma-DeltaModulatorIn this paper we use Caputo definition for fractional deriva-tive which is given as
119889120572119891 (119905)119889119905120572 = 1
Γ (120572 minus 119899) int119905
0
119891119899 (120591) 119889120591(119905 minus 120591)120572+1minus119899 (9)
where 119899 is an integer satisfying 119899 minus 1 lt 120572 lt 119899 and Γ(sdot)is Gamma function Formula (9) can be transformed intothe transfer function in the Laplace domain (assuming zeroinitial conditions) as follows
119865 (119904) = 119887119898119904119898120572 + sdot sdot sdot + 1198871119904120572 + 1198870119886119899119904119899120572 + sdot sdot sdot + 1198861119904120572 + 1198860 (10)
where 119886119896 (119896 = 0 119899) and 119887119896 (119896 = 0 119898) are constants120572 is the fractional commensurate order and 120572 lt 1 Formula(10) can be rewritten as
119889120572119909 (119905)119889119905120572 = 119860119909 (119905) + 119861119906 (119905) (11)
Formula (11) is always represented as the integer-ordersystem model when 120572 = 1 As shown in [10] when matrix119860 is deterministic without uncertainty the stability conditionfor formula (11) is clearly expressed by
min119894
1003816100381610038161003816arg (120582119894 (119860))1003816100381610038161003816 gt 1205721205872 119894 = 1 2 119873 (12)
By observation from (12) the stability region of thefractional-order (0 lt 120572 lt 1) system is boarder thanthat of the integrator-order one In this paper the fractionalcommensurate order 120572 is set as 05 to broader the stabilityregion of the proposed Sigma-Delta modulator In order toobtain the fractional commensurate order 120572 = 05 here weset 120582 = 120583 = 05 therefore (7) can be rewritten as
STF = (119898 (1198700119870111987011988911988721199043 + 11987001198701119870119901119887211990425+ 1198700119870111987011989411988721199042 + 119870011987011198701198891198870119904 + 1198700119870111987011990111990415+ 119870011987011198701198941198871119904 + 1198700119870111987011990111990405 + 119870011987011198701198941198870))sdot (119898119886111990445 + (1198981198861 + 1198862119887) 11990435 + 119898119871111988721199043 + (1198981198860+ 1198861119887 + 1198862119896 + 11989811987121198872) 11990425 + 119898119871311988721199042 + 119871111988711199042+ (1198860119887 + 1198861119896 + 11989811987121198871) 11990415 + 11987111198870119904 + 11989811987131198871119904+ (1198860119896 + 11989811987121198870) 11990405 + 11989811987131198870)minus1
4 Mathematical Problems in Engineering
XV
AFEMEMS
K0
M(s)A
Feedback
Accinput 1-Bit
stream
V
Linear model
K2
K1
Q1
Linear model
2nd-order digitalintegrator
H1(z) H2(z)
Fractional-ordercontroller
+ ++minus
Figure 4 Block diagram of the proposed Sigma-Delta modulator
Stabilitydomain
j
32
Figure 5 Stable region of the proposed 45th-order Sigma-Deltamodulator
NTF1198761 = (119898119886211990445 + (1198862119887 + 1198861119898) 11990435 + (1198862119896 + 1198861119887+ 1198981198860) 11990425 + (1198861119896 + 1198860119887) 11990415 + 11989611990405) (119898119886111990445+ (1198981198861 + 1198862119887) 11990435 + 119898119871111988721199043 + (1198981198860 + 1198861119887 + 1198862119896+ 11989811987121198872) 11990425 + 119898119871311988721199042 + 119871111988711199042 + (1198860119887 + 1198861119896+ 11989811987121198871) 11990415 + 11987111198870119904 + 11989811987131198871119904 + (1198860119896 + 11989811987121198870)sdot 11990405 + 11989811987131198870)minus1
(13)
By observation from (13) we can see that the order ofthe proposed Sigma-Delta modulator is 45th order and itbelongs to commensurate fractional-order systemThereforethe stability region of the proposed 45th-order Sigma-Deltamodulator becomes |arg (120582119894(119860)| gt 1205874 119894 = 1 2 119873 asshown in Figure 5
It can be seen from Figure 5 that the stability region of theproposed 45th-order Sigma-Delta modulator is wider thanthat of the traditional integer-order one the stability of whichis only in the left-half 119904-plane
4 PSO Algorithm for Fractional-OrderSigma-Delta Modulator
41 An Introduction to PSO Algorithm Particle swarm opti-mization (PSO) algorithm belongs to the global searchmethod [11] It is inspired by social behavior of bird flockingand swarm theory In PSO algorithm the potential solutionsare named as particles and each particle is regarded as a pointin a D-dimensional space that adjusts ldquoflyingrdquo according toits own flying experience The 119894th particle is presented as119883119894 = (1199091198941 1199091198942 119909119894119863) The best previous position of the 119894thparticle is recorded and represented as 119875119894 = (1199011198941 1199011198942 119901119894119899)The index of the best particle among all the particles in thepopulation is represented by the symbol 119892best The velocityof the position change for particle is presented as 119881119894 =(V1198941 V1198942 V119894119863) The particles are manipulated according tothe following equation
V119896+1 = 120596V119896 + 1198881 (119901best119896 minus V119896) + 1198882 (119892best119896 minus V119896)119909119896+1 = 119909119896 + V119896+1 (14)
where 120596 is the inertia weight and 1198881 and 1198882 are two positiveconstants
42 Parameter Optimization Firstly the Simulink model ofthe proposed 45th-order Sigma-Delta modulator is devel-oped as shown in Figure 6
In Figure 6 1198672(119911) is the discretization of the fractional-order 119875119868120582119863120583 controller One of the discretization methodsof the 119875119868120582119863120583 controller is to use a Tustin operator toapproximate the fractional-order operator [12] The generalform of Tustin operator is given as follows
119904plusmn120582 = (120596 (119911minus1))plusmn120582 = ( 21198791 minus 119911minus11 + 119911minus1)
plusmn120582
(15)
119879 is the sample periodplusmn120582 is the fractional order Here we useContinued Fractional Expansion (CFE) to realize (119908(119911minus1))plusmn120582
(119908 (119911minus1))plusmn120582 = ( 2119879)plusmn120582 119875119901 (119911
minus1 plusmn120582)119876119902 (119911minus1 plusmn120582) (16)
Mathematical Problems in Engineering 5
MEMS
M(s)
Feedbackacceleration
Sine waveZero-order
hold AFETravel stops
XV
Signal 1
Second-orderdigital loop filter
H1(z) Compin
Toworkspace 1
Comparator
Output
ToworkspaceForcing voltage
minus37Signal 22
Volts to acc
Vacc2
Af
Toworkspace 4
Xpos
Toworkspace 2
Vs
Toworkspace 3
H2(z)
Fractional-ordercontroller
++
Figure 6 Simulink model of the 45th-order Sigma-Delta modulator
Table 1 Parameters of the proposed Sigma-Delta modulator
Parameter ValueProof mass119898 [mg] 20Damping coefficient 119887 [Nsm] 24 times 10minus3
Spring constant 119896 [Nm] 100AFE gain 1198960 [Vm] 455 times 107
Comparator gain 1198961 1Feedback gain 1198962 [ms2] 4905
The mechanism and steps of this approximation methodare presented in [12] For instance (119908(119911minus1))plusmn05 are approxi-mated as follows
(119908 (119911minus1))05
= 505961199114 minus 252981199113 minus 379481199112 + 1265119911 + 31621199114 + 051199113 minus 0751199112 minus 025119911 + 00625
(119908 (119911minus1))minus05
= 0001 times (21199114 + 11199113 minus 11199112 minus 005119911 + 01)1199114 minus 051199113 minus 0751199112 + 025119911 + 00625
(17)
The parameters of the proposed 45th-order Sigma-Deltamodulator are listed in Table 1
43 Steps of Parameter Optimization
(1) Selection of initial value of PSO algorithm here1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 and 119896119889 in (13) areoptimized by PSO algorithm hence we consider119883119894 =(1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 119896119889) as the position vector ofPSO algorithm for the proposed 45th-order Sigma-Delta modulator The individual numbers are 600corresponding to dimension 9 for the proposed 45th-order Sigma-Delta modulator and the iteration is setas 25 120596 = 095 and 1198881 = 1198882 = 2
(2) Objective function a typical objective for Sigma-Delta is high SNR which can be maximized and iscalculated based on the power spectral density of theoutput bit stream Therefore considering the highSNR as the objective of PSO algorithm is reasonableFor each individual simulation the SNR is calculatedby a function ldquocalcSNRrdquo available through the DeltaSigma Toolbox for Matlab
(3) Initializing 119883119894 = (1199091198941 1199091198942 119909119894119863) and 119881119894 =(V1198941 V1198942 V119894119863) in the optimal range and calculatingthe objective function
(4) Applying (14) to update119883119894 and 119881119894 and then to update119892best(5) Stopping of the iteration once the termination con-
dition is satisfied Otherwise procedure goes back tostep (3)
5 Simulation
51 Simulation Results Discussion The oversampling ratio(OSR) needs to be specified in the proposed 45th-orderSigma-Delta modulator Here we choose sample frequencyof 128 kHz and OSR = 64 In each individual procedure theSNR will be calculated when the Simulink model is running
In our numerical experiment The proposed 45th-orderSigma-Delta modulator achieved about 92 dB to 118 dB ofSNRby yielding the different values for119883119894Theoptimal valuesof119883119894 are selected as in Table 2
The corresponding SNR of the proposed 45th-orderSigma-Delta modulator is 117647 dB which is improved10x compared to only 4th-order Sigma-Delta modulatorThe PSD plot of the 45th-order Sigma-Delta modulator isalso built with selected coefficients and shown in Figure 7Compared to the 4th-order Sigma-Delta modulator the pro-posed 45th-order Sigma-Delta modulator not only performsbetter SNR but also has wider noise floor (bandwidth 115Hzin the 45th-order Sigma-Delta modulator and 103Hz inthe 4th-order Sigma-Delta modulator) and sharper slope
6 Mathematical Problems in Engineering
Table 2 The optimized parameters by PSO algorithm
Parameter Value1198862 minus20971198861 28441198860 minus93591198872 minus25171198871 20341198870 minus05168119896119901 0785119896119894 7426119896119889 0021
PSD
(dB)
115 Hz103 Hz
751 dBdecade
536 dBdecade
102 103 104101
Frequency (Hz)
minus200
minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
4th-order SDMN2 = 105163 dBS
45th-order SDMN2 = 117647 dBS
Figure 7 PSD of the 45th-order and the 4th-order Sigma-Deltamodulator
(amplitude gain 751 dBdecade in the 45th-order Sigma-Delta modulator and 536 dBdecade in the 4th-order Sigma-Delta modulator)
52 Stability and Robustness Analysis The fractional-orderdigital loop integrator of the proposed 45th-order Sigma-Delta modulator can be normalized as 119867(119904) Taking thelinearized parameters 1198960 1198961 and 1198962 and the major transferfunction 119872(119904) and 1198671(119904) and 1198672(119904) into (5) a fractional-order signal transfer function (STF) of the proposed 45th-order Sigma-Deltamodulator can be obtainedThe root locusmodels of the proposed 45th-order Sigma-Delta modulatorand 4th-order Sigma-Delta modulator are built and shown inFigure 8
Figure 8 shows that the proposed 45th-order Sigma-Delta modulator is stable In Figure 8(b) the root locus of the4th-order Sigma-Delta modulator passes through the right-half 119904-plane whereas the poles and zeros of the 45th-order
Root locus
P1
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
(a) 45th-order Sigma-Delta modulator
Root locus
P2
times104
times105
minus8
minus6
minus4
minus2
0
2
4
6
8
Imag
inar
y ax
is (s
econ
dsminus1)
0 05minus1 minus05minus2 minus15minus25minus1)Real axis (seconds
(b) 4th-order Sigma-Delta modulator
Figure 8 Root locus comparison between the 45th-order and 4th-order Sigma-Delta modulators
Sigma-Deltamodulator as shown in Figure 8(a) are allocatedalong the negative axis of the 119904-plane and the farthest poleachieves minus12 times 107 This leads to better stability of thedesigned 45th-order Sigma-Delta modulator
Similar results are also observed at root locus for para-metric yield errors such as different spring constant 119896 anddamping coefficient 119887 induced by manufacturing tolerancesof MEMS For instance taking the spring constant 1198961199041 =1000Nm in MEMS transfer function to verify the robuststability of the proposed 45th-order Sigma-Delta modulatorFigure 9 shows the root locus of the proposed 45th-orderSigma-Delta modulator with 1198961199041
Also taking 1198871 = 24 times 10minus2Nsm inMEMS transfer func-tion Figure 10 shows the root locus of the proposed 45th-order Sigma-Delta modulator with 1198871 = 24 times 10minus2Nsm
Simulation results show that the robust stability of thetwo sensing elements only presents an acceptable slightfluctuation which indicates that the proposed 45th-orderSigma-Delta modulator is robust to the sensitivity of MEMSdevices
Mathematical Problems in Engineering 7
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
Figure 9 Root locus of the 45th-order Sigma-Deltamodulatorwith1198961199041 = 1000Nm
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14minus1)Real axis (seconds
minus1)
Imag
inar
y ax
is (s
econ
ds
Figure 10 Root locus of the 45th-order Sigma-Delta modulatorwith 1198871 = 24 times 10minus2Nsm
6 Conclusions
A 45th-order Sigma-Delta modulator structure is proposedin this paper The proposed 45th-order Sigma-Delta modu-lator achieves SNR = 117647 dB in simulation and noise floorunder minus150 dB in frequency of 5ndash150Hz The simulated rootlocus shows improved stability compared to the pure integer-order system with good potential to progress further Thisstudy can promote the development of high performanceof MEMS accelerometer and also provides scientific andtechnical support for the application of fractional-ordertheory to practical system
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the research fund to the topscientific and technological innovation team from BeijingUniversity of Chemical Technology (no buctylkjcx06)
References
[1] B Lv P Wang D Wang J Liu and X Liu ldquoA high-performance closed-loop fourth-order sigma-delta micro-machined accelerometerrdquo Key Engineering Materials vol 503pp 134ndash138 2012
[2] X-C Luo and J Feng ldquoAmonolithicMEMSgyroscope interfacecircuit in 035120583m CMOSrdquo Tien Tzu Hsueh PaoActa ElectronicaSinica vol 42 no 9 pp 1868ndash1872 2014
[3] S Long Y Liu K He X Tang and Q Chen ldquo116 dBdynamic range CMOS readout circuit for MEMS capacitiveaccelerometerrdquo Journal of Semiconductors vol 35 no 9 ArticleID 095004 pp 1ndash5 2014
[4] M Keller A Buhmann M Ortmanns and Y Manoli ldquoAmethod for the discrete-time simulation of continuous-timesigma-delta modulatorsrdquo in Proceedings of the IEEE Interna-tional Symposium on Circuits and Systems ISCAS rsquo07 pp 241ndash244 New Orleans LA USA May 2007
[5] V P Petkov and B E Boser ldquoHigh-order electromechanicalmodulation in micromachined inertial sensorsrdquo IEEE Transac-tions on Circuits and Systems I Regular Papers vol 53 no 5 pp1016ndash1022 2006
[6] Y Dong M Kraft and C O Gollasch ldquoA high performanceaccelerometer with fifth order-modulatorrdquo in Proceedings ofthe 15th MicroMechanics Europe Workshop pp 41ndash44 MEWLeuven BE 2004
[7] C Lang and R Tielert ldquoA low noise accelerometer with digitalpid-type controller and multibit force feedbackrdquo in Proceedingsof the the 25th European Solid-State Circuits Conference ESS-CIRC rsquo99 pp 250ndash253 IEEE Duisburg Germany 1999
[8] M Caputo ldquoDistributed order differential equations modelingdielectric induction and diffusionrdquo Fractional Calculus andApplied Analysis vol 15 no 4 pp 421ndash442 2001
[9] Y Chen H Ahn and D Xue ldquoRobust controllability of intervalfractional order linear time invariant systemsrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences and Computers and Information in EngineeringConference pp 1ndash9 ASME Long Beach Calif USA 2005
[10] M Moze and J Sabatier ldquoLMI tools for stability analysis offractional systemsrdquo in Proceedings of the International DesignEngineering Technical Conferences and Computers and Informa-tion in Engineering Conference pp 1ndash9 ASME Boston MAUSA 2005
[11] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks (ICNN rsquo95) vol 4 pp 1942ndash1948 Perth WesternAustralia November-December 1995
[12] C Tricaud and Y Chen ldquoAn approximate method for numer-ically solving fractional order optimal control problems ofgeneral formrdquo Computers amp Mathematics with Applications AnInternational Journal vol 59 no 5 pp 1644ndash1655 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
2 Mathematical Problems in Engineering
far were all considered as integer-order modulators whereasthe proposed Sigma-Delta modulator with the fractional-order digital loop integrator combines some characteristicsof systems between the orders 119873 and (119873 + 1) Thereforewe will have more possibilities for an adjustment of thepoles or zeros of the noise-shaping integrator according tospecial requirements through changing the system orderas a real (not only integer) value In this paper a novelSigma-Delta modulator with the fractional-order digital loopintegrator is presented where the fractional-order digitalloop integrator is cascaded between the analog-front-endamplifier and the quantizer In detail a 2nd-order digitalintegrator is used to perform noise-shaping of quantizationnoise from the comparator to improve SNR and furthermorea digital 119875119868120582119863120583 controller is immediately in series with the2nd-order digital integrator to provide the weak or strongfractional-type poles or zeros to improve the robust stabilityfor the proposed fractional-order Sigma-Delta modulatorThe parameters of the proposed fractional-order digital loopintegrator are tuned by using particle swarm optimization(PSO) algorithm which is easy to optimize the digital loopintegrator parameters
The rest of this paper is organized as follows inSection 2 a generalized structure of Sigma-Delta modulatoris introduced in Section 3 the proposed fractional-orderSigma-Delta modulator is discussed then PSO algorithmfor fractional-order Sigma-Delta modulator is presented inSection 4 Simulation results of the proposed Sigma-Deltamodulator are demonstrated and analyzed in Section 5Finally conclusions are given in Section 6
2 Mathematical Model of the Sigma-DeltaModulator System
Before discussing the proposed fractional-order Sigma-Deltamodulator a general system block diagram of Sigma-Deltamodulator is shown in Figure 1 which illustrates a typicalarchitect of Sigma-Delta modulator
In Figure 1 119872(119904) is the transfer function of the sensingelement which is a 2nd-order electromechanical integrator1198700 is the gain of analog-front-end (AFE) amplifier 119867(119911)is a 2nd-order digital integrator which is employed toperform noise-shaping of quantization noise from the 1-bit comparator to improve SNR So Figure 1 presents aMEMS accelerometer-based 4th-order Sigma-Delta modula-tor where the 2nd-order digital integrator 119867(119911) is insertedbetween AFE and 1-bit comparator 1198701 is the quantizer gain1198761 is the quantization noise of 1-bit quantizer and 1198702 is theequivalent linearmodel of 1-bit DAC feedback A quasi-linearmodel of the 1-bit quantizer is presented in Figure 1 where thequantizer output is equal to the sum of quantization noise1198761and quantizer input with a quantization gain 1198961
The linearized dynamical equation of the sensing elementcan be expressed in the Laplace domain as follows
119872(119904) = 11199042 + (119887119898) 119904 + 119896119898 (1)
where 119898 is the proof mass 119887 is the damping coefficient and119896 is the spring constant If 119898 = 20mg 119887 = 24 times 10minus3Nms
XV
AFEMEMS
K0
M(s)
Accinput
1-Bitstream
Linear model
K2
K1Q1
Linearmodel
Digitalintegrator
H(z)
Quantizer
DAC
+
Figure 1 Block diagram of Sigma-Delta modulator
Phas
e (de
g)
Bode diagram
102 105103 104
Frequency (rads)
Mag
nitu
de (d
B)
minus200
minus180
minus160
minus140
minus120
minus100
minus180
minus135
minus90
minus45
0
Figure 2 Bode plot of the sensing element
and 119896 = 100Nm the frequency domain characteristic curveof119872(119904) is shown in Figure 2
In Figure 1119867(119904) is the continuous frequency response ofdigital loop integrator119867(119911) which can be expressed as
119867(119911) = sum119872119896=0 119887119896119911minus1198961 minus sum119873119896=1 119886119896119911minus119896 (2)
where 119887119896 and 119886119896 are coefficients of the numerator and denomi-nator
3 Fractional-Order Sigma-DeltaModulator System
31MathematicalModel of the Proposed Sigma-DeltaModula-tor In this paper the proposed fractional-order Sigma-Deltamodulator is built by using the fractional-order digital loopintegrator instead of 119867(119911) The fractional-order digital loopintegrator of the proposed Sigma-Delta modulator is shownin Figure 31198671(119911) is the 2nd-order digital loop integrator which canbe written as
1198671 (119911) = 11988721199112 + 1198871119911 + 119887011988621199112 + 1198861119911 + 1198860 (3)
where 1198862 1198861 1198860 1198872 1198871 and 1198870 are the coefficients of1198671(119911)
Mathematical Problems in Engineering 3
Digital integratorH1(z) H2(z)
2nd-orderintegrator
Fractional-ordercontroller
Figure 3Digital integrator of the proposed Sigma-Deltamodulator
1198672(119911) is the digital119875119868120582119863120583 controller which can bewrittenas
1198672 (119911) = 119870119901 + 119870119894 (119908 (119911minus1))minus120582 + 119870119889 (119908 (119911minus1))120583 (4)
where 120582 120583 and 119870119901 119870119894 and 119870119889 are the integral-orderdifferential-order and proportional integral and differentialcoefficients of1198672(119911) respectively
Here the architect of the proposed fractional-orderSigma-Delta modulator is presented in Figure 4
From the system model shown in Figure 4 the signaltransfer function (STF) and the noise transfer function(NTF119876
1
) of the proposed fractional-order Sigma-Delta mod-ulator can be written as
STF = 11987001198701119872(119904)1198671 (119904)1198672 (119904)1 + 119870011987011198702119872(119904)1198671 (119904)1198672 (119904) (5)
NTF1198761
= 11 + 119870011987011198702119872(119904)1198671 (119904)1198672 (119904) (6)
1198671(119904) and 1198672(119904) are the continuous frequency responses ofthe digital loop integrators 1198671(119911) and 1198672(119911) respectivelyTaking (3) and (4) in (5) and (6) STF NTF1198761 can be rewrittenas
STF = (119898 (1198700119870111987011988911988721199042+120582+120583 + 1198700119870111987011990111988721199042+120582+ 1198700119870111987011989411988721199042 + 119870011987011198701198891198870119904120582+120583 + 119870011987011198701199011199041+120582+ 119870011987011198701198941198871119904 + 11987001198701119870119901119904120582 + 119870011987011198701198941198870)) (11989811988611199044+120582+ (1198981198861 + 1198862119887) 1199043+120582 + 119898119871111988721199042+120582+120583 + (1198981198860 + 1198861119887+ 1198862119896 + 11989811987121198872) 1199042+120582 + 119898119871311988721199042 + 119871111988711199041+120582+120583 + (1198860119887+ 1198861119896 + 11989811987121198871) 1199041+120582 + 11987111198870119904120582+120583 + 11989811987131198871119904 + (1198860119896+ 11989811987121198870) 119904120582 + 11989811987131198870)minus1
NTF1198761 = (11989811988621199044+120582 + (1198862119887 + 1198861119898) 1199043+120582 + (1198862119896 + 1198861119887+ 1198981198860) 1199042+120582 + (1198861119896 + 1198860119887) 1199041+120582 + 119896119904120582) (11989811988611199044+120582+ (1198981198861 + 1198862119887) 1199043+120582 + 119898119871111988721199042+120582+120583 + (1198981198860 + 1198861119887+ 1198862119896 + 11989811987121198872) 1199042+120582 + 119898119871311988721199042 + 119871111988711199041+120582+120583 + (1198860119887+ 1198861119896 + 11989811987121198871) 1199041+120582 + 11987111198870119904120582+120583 + 11989811987131198871119904 + (1198860119896+ 11989811987121198870) 119904120582 + 11989811987131198870)minus1
(7)
where
1198711 = 1198700119870111987021198701198891198712 = 1198700119870111987021198701199011198713 = 119870011987011198702119870119894
(8)
To achieve high SNR and stability of the overall system1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 and 119896119889 in (7) will be optimized byusing PSO algorithm in the following section
32 Stability Analysis for the Proposed Sigma-DeltaModulatorIn this paper we use Caputo definition for fractional deriva-tive which is given as
119889120572119891 (119905)119889119905120572 = 1
Γ (120572 minus 119899) int119905
0
119891119899 (120591) 119889120591(119905 minus 120591)120572+1minus119899 (9)
where 119899 is an integer satisfying 119899 minus 1 lt 120572 lt 119899 and Γ(sdot)is Gamma function Formula (9) can be transformed intothe transfer function in the Laplace domain (assuming zeroinitial conditions) as follows
119865 (119904) = 119887119898119904119898120572 + sdot sdot sdot + 1198871119904120572 + 1198870119886119899119904119899120572 + sdot sdot sdot + 1198861119904120572 + 1198860 (10)
where 119886119896 (119896 = 0 119899) and 119887119896 (119896 = 0 119898) are constants120572 is the fractional commensurate order and 120572 lt 1 Formula(10) can be rewritten as
119889120572119909 (119905)119889119905120572 = 119860119909 (119905) + 119861119906 (119905) (11)
Formula (11) is always represented as the integer-ordersystem model when 120572 = 1 As shown in [10] when matrix119860 is deterministic without uncertainty the stability conditionfor formula (11) is clearly expressed by
min119894
1003816100381610038161003816arg (120582119894 (119860))1003816100381610038161003816 gt 1205721205872 119894 = 1 2 119873 (12)
By observation from (12) the stability region of thefractional-order (0 lt 120572 lt 1) system is boarder thanthat of the integrator-order one In this paper the fractionalcommensurate order 120572 is set as 05 to broader the stabilityregion of the proposed Sigma-Delta modulator In order toobtain the fractional commensurate order 120572 = 05 here weset 120582 = 120583 = 05 therefore (7) can be rewritten as
STF = (119898 (1198700119870111987011988911988721199043 + 11987001198701119870119901119887211990425+ 1198700119870111987011989411988721199042 + 119870011987011198701198891198870119904 + 1198700119870111987011990111990415+ 119870011987011198701198941198871119904 + 1198700119870111987011990111990405 + 119870011987011198701198941198870))sdot (119898119886111990445 + (1198981198861 + 1198862119887) 11990435 + 119898119871111988721199043 + (1198981198860+ 1198861119887 + 1198862119896 + 11989811987121198872) 11990425 + 119898119871311988721199042 + 119871111988711199042+ (1198860119887 + 1198861119896 + 11989811987121198871) 11990415 + 11987111198870119904 + 11989811987131198871119904+ (1198860119896 + 11989811987121198870) 11990405 + 11989811987131198870)minus1
4 Mathematical Problems in Engineering
XV
AFEMEMS
K0
M(s)A
Feedback
Accinput 1-Bit
stream
V
Linear model
K2
K1
Q1
Linear model
2nd-order digitalintegrator
H1(z) H2(z)
Fractional-ordercontroller
+ ++minus
Figure 4 Block diagram of the proposed Sigma-Delta modulator
Stabilitydomain
j
32
Figure 5 Stable region of the proposed 45th-order Sigma-Deltamodulator
NTF1198761 = (119898119886211990445 + (1198862119887 + 1198861119898) 11990435 + (1198862119896 + 1198861119887+ 1198981198860) 11990425 + (1198861119896 + 1198860119887) 11990415 + 11989611990405) (119898119886111990445+ (1198981198861 + 1198862119887) 11990435 + 119898119871111988721199043 + (1198981198860 + 1198861119887 + 1198862119896+ 11989811987121198872) 11990425 + 119898119871311988721199042 + 119871111988711199042 + (1198860119887 + 1198861119896+ 11989811987121198871) 11990415 + 11987111198870119904 + 11989811987131198871119904 + (1198860119896 + 11989811987121198870)sdot 11990405 + 11989811987131198870)minus1
(13)
By observation from (13) we can see that the order ofthe proposed Sigma-Delta modulator is 45th order and itbelongs to commensurate fractional-order systemThereforethe stability region of the proposed 45th-order Sigma-Deltamodulator becomes |arg (120582119894(119860)| gt 1205874 119894 = 1 2 119873 asshown in Figure 5
It can be seen from Figure 5 that the stability region of theproposed 45th-order Sigma-Delta modulator is wider thanthat of the traditional integer-order one the stability of whichis only in the left-half 119904-plane
4 PSO Algorithm for Fractional-OrderSigma-Delta Modulator
41 An Introduction to PSO Algorithm Particle swarm opti-mization (PSO) algorithm belongs to the global searchmethod [11] It is inspired by social behavior of bird flockingand swarm theory In PSO algorithm the potential solutionsare named as particles and each particle is regarded as a pointin a D-dimensional space that adjusts ldquoflyingrdquo according toits own flying experience The 119894th particle is presented as119883119894 = (1199091198941 1199091198942 119909119894119863) The best previous position of the 119894thparticle is recorded and represented as 119875119894 = (1199011198941 1199011198942 119901119894119899)The index of the best particle among all the particles in thepopulation is represented by the symbol 119892best The velocityof the position change for particle is presented as 119881119894 =(V1198941 V1198942 V119894119863) The particles are manipulated according tothe following equation
V119896+1 = 120596V119896 + 1198881 (119901best119896 minus V119896) + 1198882 (119892best119896 minus V119896)119909119896+1 = 119909119896 + V119896+1 (14)
where 120596 is the inertia weight and 1198881 and 1198882 are two positiveconstants
42 Parameter Optimization Firstly the Simulink model ofthe proposed 45th-order Sigma-Delta modulator is devel-oped as shown in Figure 6
In Figure 6 1198672(119911) is the discretization of the fractional-order 119875119868120582119863120583 controller One of the discretization methodsof the 119875119868120582119863120583 controller is to use a Tustin operator toapproximate the fractional-order operator [12] The generalform of Tustin operator is given as follows
119904plusmn120582 = (120596 (119911minus1))plusmn120582 = ( 21198791 minus 119911minus11 + 119911minus1)
plusmn120582
(15)
119879 is the sample periodplusmn120582 is the fractional order Here we useContinued Fractional Expansion (CFE) to realize (119908(119911minus1))plusmn120582
(119908 (119911minus1))plusmn120582 = ( 2119879)plusmn120582 119875119901 (119911
minus1 plusmn120582)119876119902 (119911minus1 plusmn120582) (16)
Mathematical Problems in Engineering 5
MEMS
M(s)
Feedbackacceleration
Sine waveZero-order
hold AFETravel stops
XV
Signal 1
Second-orderdigital loop filter
H1(z) Compin
Toworkspace 1
Comparator
Output
ToworkspaceForcing voltage
minus37Signal 22
Volts to acc
Vacc2
Af
Toworkspace 4
Xpos
Toworkspace 2
Vs
Toworkspace 3
H2(z)
Fractional-ordercontroller
++
Figure 6 Simulink model of the 45th-order Sigma-Delta modulator
Table 1 Parameters of the proposed Sigma-Delta modulator
Parameter ValueProof mass119898 [mg] 20Damping coefficient 119887 [Nsm] 24 times 10minus3
Spring constant 119896 [Nm] 100AFE gain 1198960 [Vm] 455 times 107
Comparator gain 1198961 1Feedback gain 1198962 [ms2] 4905
The mechanism and steps of this approximation methodare presented in [12] For instance (119908(119911minus1))plusmn05 are approxi-mated as follows
(119908 (119911minus1))05
= 505961199114 minus 252981199113 minus 379481199112 + 1265119911 + 31621199114 + 051199113 minus 0751199112 minus 025119911 + 00625
(119908 (119911minus1))minus05
= 0001 times (21199114 + 11199113 minus 11199112 minus 005119911 + 01)1199114 minus 051199113 minus 0751199112 + 025119911 + 00625
(17)
The parameters of the proposed 45th-order Sigma-Deltamodulator are listed in Table 1
43 Steps of Parameter Optimization
(1) Selection of initial value of PSO algorithm here1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 and 119896119889 in (13) areoptimized by PSO algorithm hence we consider119883119894 =(1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 119896119889) as the position vector ofPSO algorithm for the proposed 45th-order Sigma-Delta modulator The individual numbers are 600corresponding to dimension 9 for the proposed 45th-order Sigma-Delta modulator and the iteration is setas 25 120596 = 095 and 1198881 = 1198882 = 2
(2) Objective function a typical objective for Sigma-Delta is high SNR which can be maximized and iscalculated based on the power spectral density of theoutput bit stream Therefore considering the highSNR as the objective of PSO algorithm is reasonableFor each individual simulation the SNR is calculatedby a function ldquocalcSNRrdquo available through the DeltaSigma Toolbox for Matlab
(3) Initializing 119883119894 = (1199091198941 1199091198942 119909119894119863) and 119881119894 =(V1198941 V1198942 V119894119863) in the optimal range and calculatingthe objective function
(4) Applying (14) to update119883119894 and 119881119894 and then to update119892best(5) Stopping of the iteration once the termination con-
dition is satisfied Otherwise procedure goes back tostep (3)
5 Simulation
51 Simulation Results Discussion The oversampling ratio(OSR) needs to be specified in the proposed 45th-orderSigma-Delta modulator Here we choose sample frequencyof 128 kHz and OSR = 64 In each individual procedure theSNR will be calculated when the Simulink model is running
In our numerical experiment The proposed 45th-orderSigma-Delta modulator achieved about 92 dB to 118 dB ofSNRby yielding the different values for119883119894Theoptimal valuesof119883119894 are selected as in Table 2
The corresponding SNR of the proposed 45th-orderSigma-Delta modulator is 117647 dB which is improved10x compared to only 4th-order Sigma-Delta modulatorThe PSD plot of the 45th-order Sigma-Delta modulator isalso built with selected coefficients and shown in Figure 7Compared to the 4th-order Sigma-Delta modulator the pro-posed 45th-order Sigma-Delta modulator not only performsbetter SNR but also has wider noise floor (bandwidth 115Hzin the 45th-order Sigma-Delta modulator and 103Hz inthe 4th-order Sigma-Delta modulator) and sharper slope
6 Mathematical Problems in Engineering
Table 2 The optimized parameters by PSO algorithm
Parameter Value1198862 minus20971198861 28441198860 minus93591198872 minus25171198871 20341198870 minus05168119896119901 0785119896119894 7426119896119889 0021
PSD
(dB)
115 Hz103 Hz
751 dBdecade
536 dBdecade
102 103 104101
Frequency (Hz)
minus200
minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
4th-order SDMN2 = 105163 dBS
45th-order SDMN2 = 117647 dBS
Figure 7 PSD of the 45th-order and the 4th-order Sigma-Deltamodulator
(amplitude gain 751 dBdecade in the 45th-order Sigma-Delta modulator and 536 dBdecade in the 4th-order Sigma-Delta modulator)
52 Stability and Robustness Analysis The fractional-orderdigital loop integrator of the proposed 45th-order Sigma-Delta modulator can be normalized as 119867(119904) Taking thelinearized parameters 1198960 1198961 and 1198962 and the major transferfunction 119872(119904) and 1198671(119904) and 1198672(119904) into (5) a fractional-order signal transfer function (STF) of the proposed 45th-order Sigma-Deltamodulator can be obtainedThe root locusmodels of the proposed 45th-order Sigma-Delta modulatorand 4th-order Sigma-Delta modulator are built and shown inFigure 8
Figure 8 shows that the proposed 45th-order Sigma-Delta modulator is stable In Figure 8(b) the root locus of the4th-order Sigma-Delta modulator passes through the right-half 119904-plane whereas the poles and zeros of the 45th-order
Root locus
P1
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
(a) 45th-order Sigma-Delta modulator
Root locus
P2
times104
times105
minus8
minus6
minus4
minus2
0
2
4
6
8
Imag
inar
y ax
is (s
econ
dsminus1)
0 05minus1 minus05minus2 minus15minus25minus1)Real axis (seconds
(b) 4th-order Sigma-Delta modulator
Figure 8 Root locus comparison between the 45th-order and 4th-order Sigma-Delta modulators
Sigma-Deltamodulator as shown in Figure 8(a) are allocatedalong the negative axis of the 119904-plane and the farthest poleachieves minus12 times 107 This leads to better stability of thedesigned 45th-order Sigma-Delta modulator
Similar results are also observed at root locus for para-metric yield errors such as different spring constant 119896 anddamping coefficient 119887 induced by manufacturing tolerancesof MEMS For instance taking the spring constant 1198961199041 =1000Nm in MEMS transfer function to verify the robuststability of the proposed 45th-order Sigma-Delta modulatorFigure 9 shows the root locus of the proposed 45th-orderSigma-Delta modulator with 1198961199041
Also taking 1198871 = 24 times 10minus2Nsm inMEMS transfer func-tion Figure 10 shows the root locus of the proposed 45th-order Sigma-Delta modulator with 1198871 = 24 times 10minus2Nsm
Simulation results show that the robust stability of thetwo sensing elements only presents an acceptable slightfluctuation which indicates that the proposed 45th-orderSigma-Delta modulator is robust to the sensitivity of MEMSdevices
Mathematical Problems in Engineering 7
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
Figure 9 Root locus of the 45th-order Sigma-Deltamodulatorwith1198961199041 = 1000Nm
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14minus1)Real axis (seconds
minus1)
Imag
inar
y ax
is (s
econ
ds
Figure 10 Root locus of the 45th-order Sigma-Delta modulatorwith 1198871 = 24 times 10minus2Nsm
6 Conclusions
A 45th-order Sigma-Delta modulator structure is proposedin this paper The proposed 45th-order Sigma-Delta modu-lator achieves SNR = 117647 dB in simulation and noise floorunder minus150 dB in frequency of 5ndash150Hz The simulated rootlocus shows improved stability compared to the pure integer-order system with good potential to progress further Thisstudy can promote the development of high performanceof MEMS accelerometer and also provides scientific andtechnical support for the application of fractional-ordertheory to practical system
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the research fund to the topscientific and technological innovation team from BeijingUniversity of Chemical Technology (no buctylkjcx06)
References
[1] B Lv P Wang D Wang J Liu and X Liu ldquoA high-performance closed-loop fourth-order sigma-delta micro-machined accelerometerrdquo Key Engineering Materials vol 503pp 134ndash138 2012
[2] X-C Luo and J Feng ldquoAmonolithicMEMSgyroscope interfacecircuit in 035120583m CMOSrdquo Tien Tzu Hsueh PaoActa ElectronicaSinica vol 42 no 9 pp 1868ndash1872 2014
[3] S Long Y Liu K He X Tang and Q Chen ldquo116 dBdynamic range CMOS readout circuit for MEMS capacitiveaccelerometerrdquo Journal of Semiconductors vol 35 no 9 ArticleID 095004 pp 1ndash5 2014
[4] M Keller A Buhmann M Ortmanns and Y Manoli ldquoAmethod for the discrete-time simulation of continuous-timesigma-delta modulatorsrdquo in Proceedings of the IEEE Interna-tional Symposium on Circuits and Systems ISCAS rsquo07 pp 241ndash244 New Orleans LA USA May 2007
[5] V P Petkov and B E Boser ldquoHigh-order electromechanicalmodulation in micromachined inertial sensorsrdquo IEEE Transac-tions on Circuits and Systems I Regular Papers vol 53 no 5 pp1016ndash1022 2006
[6] Y Dong M Kraft and C O Gollasch ldquoA high performanceaccelerometer with fifth order-modulatorrdquo in Proceedings ofthe 15th MicroMechanics Europe Workshop pp 41ndash44 MEWLeuven BE 2004
[7] C Lang and R Tielert ldquoA low noise accelerometer with digitalpid-type controller and multibit force feedbackrdquo in Proceedingsof the the 25th European Solid-State Circuits Conference ESS-CIRC rsquo99 pp 250ndash253 IEEE Duisburg Germany 1999
[8] M Caputo ldquoDistributed order differential equations modelingdielectric induction and diffusionrdquo Fractional Calculus andApplied Analysis vol 15 no 4 pp 421ndash442 2001
[9] Y Chen H Ahn and D Xue ldquoRobust controllability of intervalfractional order linear time invariant systemsrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences and Computers and Information in EngineeringConference pp 1ndash9 ASME Long Beach Calif USA 2005
[10] M Moze and J Sabatier ldquoLMI tools for stability analysis offractional systemsrdquo in Proceedings of the International DesignEngineering Technical Conferences and Computers and Informa-tion in Engineering Conference pp 1ndash9 ASME Boston MAUSA 2005
[11] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks (ICNN rsquo95) vol 4 pp 1942ndash1948 Perth WesternAustralia November-December 1995
[12] C Tricaud and Y Chen ldquoAn approximate method for numer-ically solving fractional order optimal control problems ofgeneral formrdquo Computers amp Mathematics with Applications AnInternational Journal vol 59 no 5 pp 1644ndash1655 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Digital integratorH1(z) H2(z)
2nd-orderintegrator
Fractional-ordercontroller
Figure 3Digital integrator of the proposed Sigma-Deltamodulator
1198672(119911) is the digital119875119868120582119863120583 controller which can bewrittenas
1198672 (119911) = 119870119901 + 119870119894 (119908 (119911minus1))minus120582 + 119870119889 (119908 (119911minus1))120583 (4)
where 120582 120583 and 119870119901 119870119894 and 119870119889 are the integral-orderdifferential-order and proportional integral and differentialcoefficients of1198672(119911) respectively
Here the architect of the proposed fractional-orderSigma-Delta modulator is presented in Figure 4
From the system model shown in Figure 4 the signaltransfer function (STF) and the noise transfer function(NTF119876
1
) of the proposed fractional-order Sigma-Delta mod-ulator can be written as
STF = 11987001198701119872(119904)1198671 (119904)1198672 (119904)1 + 119870011987011198702119872(119904)1198671 (119904)1198672 (119904) (5)
NTF1198761
= 11 + 119870011987011198702119872(119904)1198671 (119904)1198672 (119904) (6)
1198671(119904) and 1198672(119904) are the continuous frequency responses ofthe digital loop integrators 1198671(119911) and 1198672(119911) respectivelyTaking (3) and (4) in (5) and (6) STF NTF1198761 can be rewrittenas
STF = (119898 (1198700119870111987011988911988721199042+120582+120583 + 1198700119870111987011990111988721199042+120582+ 1198700119870111987011989411988721199042 + 119870011987011198701198891198870119904120582+120583 + 119870011987011198701199011199041+120582+ 119870011987011198701198941198871119904 + 11987001198701119870119901119904120582 + 119870011987011198701198941198870)) (11989811988611199044+120582+ (1198981198861 + 1198862119887) 1199043+120582 + 119898119871111988721199042+120582+120583 + (1198981198860 + 1198861119887+ 1198862119896 + 11989811987121198872) 1199042+120582 + 119898119871311988721199042 + 119871111988711199041+120582+120583 + (1198860119887+ 1198861119896 + 11989811987121198871) 1199041+120582 + 11987111198870119904120582+120583 + 11989811987131198871119904 + (1198860119896+ 11989811987121198870) 119904120582 + 11989811987131198870)minus1
NTF1198761 = (11989811988621199044+120582 + (1198862119887 + 1198861119898) 1199043+120582 + (1198862119896 + 1198861119887+ 1198981198860) 1199042+120582 + (1198861119896 + 1198860119887) 1199041+120582 + 119896119904120582) (11989811988611199044+120582+ (1198981198861 + 1198862119887) 1199043+120582 + 119898119871111988721199042+120582+120583 + (1198981198860 + 1198861119887+ 1198862119896 + 11989811987121198872) 1199042+120582 + 119898119871311988721199042 + 119871111988711199041+120582+120583 + (1198860119887+ 1198861119896 + 11989811987121198871) 1199041+120582 + 11987111198870119904120582+120583 + 11989811987131198871119904 + (1198860119896+ 11989811987121198870) 119904120582 + 11989811987131198870)minus1
(7)
where
1198711 = 1198700119870111987021198701198891198712 = 1198700119870111987021198701199011198713 = 119870011987011198702119870119894
(8)
To achieve high SNR and stability of the overall system1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 and 119896119889 in (7) will be optimized byusing PSO algorithm in the following section
32 Stability Analysis for the Proposed Sigma-DeltaModulatorIn this paper we use Caputo definition for fractional deriva-tive which is given as
119889120572119891 (119905)119889119905120572 = 1
Γ (120572 minus 119899) int119905
0
119891119899 (120591) 119889120591(119905 minus 120591)120572+1minus119899 (9)
where 119899 is an integer satisfying 119899 minus 1 lt 120572 lt 119899 and Γ(sdot)is Gamma function Formula (9) can be transformed intothe transfer function in the Laplace domain (assuming zeroinitial conditions) as follows
119865 (119904) = 119887119898119904119898120572 + sdot sdot sdot + 1198871119904120572 + 1198870119886119899119904119899120572 + sdot sdot sdot + 1198861119904120572 + 1198860 (10)
where 119886119896 (119896 = 0 119899) and 119887119896 (119896 = 0 119898) are constants120572 is the fractional commensurate order and 120572 lt 1 Formula(10) can be rewritten as
119889120572119909 (119905)119889119905120572 = 119860119909 (119905) + 119861119906 (119905) (11)
Formula (11) is always represented as the integer-ordersystem model when 120572 = 1 As shown in [10] when matrix119860 is deterministic without uncertainty the stability conditionfor formula (11) is clearly expressed by
min119894
1003816100381610038161003816arg (120582119894 (119860))1003816100381610038161003816 gt 1205721205872 119894 = 1 2 119873 (12)
By observation from (12) the stability region of thefractional-order (0 lt 120572 lt 1) system is boarder thanthat of the integrator-order one In this paper the fractionalcommensurate order 120572 is set as 05 to broader the stabilityregion of the proposed Sigma-Delta modulator In order toobtain the fractional commensurate order 120572 = 05 here weset 120582 = 120583 = 05 therefore (7) can be rewritten as
STF = (119898 (1198700119870111987011988911988721199043 + 11987001198701119870119901119887211990425+ 1198700119870111987011989411988721199042 + 119870011987011198701198891198870119904 + 1198700119870111987011990111990415+ 119870011987011198701198941198871119904 + 1198700119870111987011990111990405 + 119870011987011198701198941198870))sdot (119898119886111990445 + (1198981198861 + 1198862119887) 11990435 + 119898119871111988721199043 + (1198981198860+ 1198861119887 + 1198862119896 + 11989811987121198872) 11990425 + 119898119871311988721199042 + 119871111988711199042+ (1198860119887 + 1198861119896 + 11989811987121198871) 11990415 + 11987111198870119904 + 11989811987131198871119904+ (1198860119896 + 11989811987121198870) 11990405 + 11989811987131198870)minus1
4 Mathematical Problems in Engineering
XV
AFEMEMS
K0
M(s)A
Feedback
Accinput 1-Bit
stream
V
Linear model
K2
K1
Q1
Linear model
2nd-order digitalintegrator
H1(z) H2(z)
Fractional-ordercontroller
+ ++minus
Figure 4 Block diagram of the proposed Sigma-Delta modulator
Stabilitydomain
j
32
Figure 5 Stable region of the proposed 45th-order Sigma-Deltamodulator
NTF1198761 = (119898119886211990445 + (1198862119887 + 1198861119898) 11990435 + (1198862119896 + 1198861119887+ 1198981198860) 11990425 + (1198861119896 + 1198860119887) 11990415 + 11989611990405) (119898119886111990445+ (1198981198861 + 1198862119887) 11990435 + 119898119871111988721199043 + (1198981198860 + 1198861119887 + 1198862119896+ 11989811987121198872) 11990425 + 119898119871311988721199042 + 119871111988711199042 + (1198860119887 + 1198861119896+ 11989811987121198871) 11990415 + 11987111198870119904 + 11989811987131198871119904 + (1198860119896 + 11989811987121198870)sdot 11990405 + 11989811987131198870)minus1
(13)
By observation from (13) we can see that the order ofthe proposed Sigma-Delta modulator is 45th order and itbelongs to commensurate fractional-order systemThereforethe stability region of the proposed 45th-order Sigma-Deltamodulator becomes |arg (120582119894(119860)| gt 1205874 119894 = 1 2 119873 asshown in Figure 5
It can be seen from Figure 5 that the stability region of theproposed 45th-order Sigma-Delta modulator is wider thanthat of the traditional integer-order one the stability of whichis only in the left-half 119904-plane
4 PSO Algorithm for Fractional-OrderSigma-Delta Modulator
41 An Introduction to PSO Algorithm Particle swarm opti-mization (PSO) algorithm belongs to the global searchmethod [11] It is inspired by social behavior of bird flockingand swarm theory In PSO algorithm the potential solutionsare named as particles and each particle is regarded as a pointin a D-dimensional space that adjusts ldquoflyingrdquo according toits own flying experience The 119894th particle is presented as119883119894 = (1199091198941 1199091198942 119909119894119863) The best previous position of the 119894thparticle is recorded and represented as 119875119894 = (1199011198941 1199011198942 119901119894119899)The index of the best particle among all the particles in thepopulation is represented by the symbol 119892best The velocityof the position change for particle is presented as 119881119894 =(V1198941 V1198942 V119894119863) The particles are manipulated according tothe following equation
V119896+1 = 120596V119896 + 1198881 (119901best119896 minus V119896) + 1198882 (119892best119896 minus V119896)119909119896+1 = 119909119896 + V119896+1 (14)
where 120596 is the inertia weight and 1198881 and 1198882 are two positiveconstants
42 Parameter Optimization Firstly the Simulink model ofthe proposed 45th-order Sigma-Delta modulator is devel-oped as shown in Figure 6
In Figure 6 1198672(119911) is the discretization of the fractional-order 119875119868120582119863120583 controller One of the discretization methodsof the 119875119868120582119863120583 controller is to use a Tustin operator toapproximate the fractional-order operator [12] The generalform of Tustin operator is given as follows
119904plusmn120582 = (120596 (119911minus1))plusmn120582 = ( 21198791 minus 119911minus11 + 119911minus1)
plusmn120582
(15)
119879 is the sample periodplusmn120582 is the fractional order Here we useContinued Fractional Expansion (CFE) to realize (119908(119911minus1))plusmn120582
(119908 (119911minus1))plusmn120582 = ( 2119879)plusmn120582 119875119901 (119911
minus1 plusmn120582)119876119902 (119911minus1 plusmn120582) (16)
Mathematical Problems in Engineering 5
MEMS
M(s)
Feedbackacceleration
Sine waveZero-order
hold AFETravel stops
XV
Signal 1
Second-orderdigital loop filter
H1(z) Compin
Toworkspace 1
Comparator
Output
ToworkspaceForcing voltage
minus37Signal 22
Volts to acc
Vacc2
Af
Toworkspace 4
Xpos
Toworkspace 2
Vs
Toworkspace 3
H2(z)
Fractional-ordercontroller
++
Figure 6 Simulink model of the 45th-order Sigma-Delta modulator
Table 1 Parameters of the proposed Sigma-Delta modulator
Parameter ValueProof mass119898 [mg] 20Damping coefficient 119887 [Nsm] 24 times 10minus3
Spring constant 119896 [Nm] 100AFE gain 1198960 [Vm] 455 times 107
Comparator gain 1198961 1Feedback gain 1198962 [ms2] 4905
The mechanism and steps of this approximation methodare presented in [12] For instance (119908(119911minus1))plusmn05 are approxi-mated as follows
(119908 (119911minus1))05
= 505961199114 minus 252981199113 minus 379481199112 + 1265119911 + 31621199114 + 051199113 minus 0751199112 minus 025119911 + 00625
(119908 (119911minus1))minus05
= 0001 times (21199114 + 11199113 minus 11199112 minus 005119911 + 01)1199114 minus 051199113 minus 0751199112 + 025119911 + 00625
(17)
The parameters of the proposed 45th-order Sigma-Deltamodulator are listed in Table 1
43 Steps of Parameter Optimization
(1) Selection of initial value of PSO algorithm here1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 and 119896119889 in (13) areoptimized by PSO algorithm hence we consider119883119894 =(1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 119896119889) as the position vector ofPSO algorithm for the proposed 45th-order Sigma-Delta modulator The individual numbers are 600corresponding to dimension 9 for the proposed 45th-order Sigma-Delta modulator and the iteration is setas 25 120596 = 095 and 1198881 = 1198882 = 2
(2) Objective function a typical objective for Sigma-Delta is high SNR which can be maximized and iscalculated based on the power spectral density of theoutput bit stream Therefore considering the highSNR as the objective of PSO algorithm is reasonableFor each individual simulation the SNR is calculatedby a function ldquocalcSNRrdquo available through the DeltaSigma Toolbox for Matlab
(3) Initializing 119883119894 = (1199091198941 1199091198942 119909119894119863) and 119881119894 =(V1198941 V1198942 V119894119863) in the optimal range and calculatingthe objective function
(4) Applying (14) to update119883119894 and 119881119894 and then to update119892best(5) Stopping of the iteration once the termination con-
dition is satisfied Otherwise procedure goes back tostep (3)
5 Simulation
51 Simulation Results Discussion The oversampling ratio(OSR) needs to be specified in the proposed 45th-orderSigma-Delta modulator Here we choose sample frequencyof 128 kHz and OSR = 64 In each individual procedure theSNR will be calculated when the Simulink model is running
In our numerical experiment The proposed 45th-orderSigma-Delta modulator achieved about 92 dB to 118 dB ofSNRby yielding the different values for119883119894Theoptimal valuesof119883119894 are selected as in Table 2
The corresponding SNR of the proposed 45th-orderSigma-Delta modulator is 117647 dB which is improved10x compared to only 4th-order Sigma-Delta modulatorThe PSD plot of the 45th-order Sigma-Delta modulator isalso built with selected coefficients and shown in Figure 7Compared to the 4th-order Sigma-Delta modulator the pro-posed 45th-order Sigma-Delta modulator not only performsbetter SNR but also has wider noise floor (bandwidth 115Hzin the 45th-order Sigma-Delta modulator and 103Hz inthe 4th-order Sigma-Delta modulator) and sharper slope
6 Mathematical Problems in Engineering
Table 2 The optimized parameters by PSO algorithm
Parameter Value1198862 minus20971198861 28441198860 minus93591198872 minus25171198871 20341198870 minus05168119896119901 0785119896119894 7426119896119889 0021
PSD
(dB)
115 Hz103 Hz
751 dBdecade
536 dBdecade
102 103 104101
Frequency (Hz)
minus200
minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
4th-order SDMN2 = 105163 dBS
45th-order SDMN2 = 117647 dBS
Figure 7 PSD of the 45th-order and the 4th-order Sigma-Deltamodulator
(amplitude gain 751 dBdecade in the 45th-order Sigma-Delta modulator and 536 dBdecade in the 4th-order Sigma-Delta modulator)
52 Stability and Robustness Analysis The fractional-orderdigital loop integrator of the proposed 45th-order Sigma-Delta modulator can be normalized as 119867(119904) Taking thelinearized parameters 1198960 1198961 and 1198962 and the major transferfunction 119872(119904) and 1198671(119904) and 1198672(119904) into (5) a fractional-order signal transfer function (STF) of the proposed 45th-order Sigma-Deltamodulator can be obtainedThe root locusmodels of the proposed 45th-order Sigma-Delta modulatorand 4th-order Sigma-Delta modulator are built and shown inFigure 8
Figure 8 shows that the proposed 45th-order Sigma-Delta modulator is stable In Figure 8(b) the root locus of the4th-order Sigma-Delta modulator passes through the right-half 119904-plane whereas the poles and zeros of the 45th-order
Root locus
P1
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
(a) 45th-order Sigma-Delta modulator
Root locus
P2
times104
times105
minus8
minus6
minus4
minus2
0
2
4
6
8
Imag
inar
y ax
is (s
econ
dsminus1)
0 05minus1 minus05minus2 minus15minus25minus1)Real axis (seconds
(b) 4th-order Sigma-Delta modulator
Figure 8 Root locus comparison between the 45th-order and 4th-order Sigma-Delta modulators
Sigma-Deltamodulator as shown in Figure 8(a) are allocatedalong the negative axis of the 119904-plane and the farthest poleachieves minus12 times 107 This leads to better stability of thedesigned 45th-order Sigma-Delta modulator
Similar results are also observed at root locus for para-metric yield errors such as different spring constant 119896 anddamping coefficient 119887 induced by manufacturing tolerancesof MEMS For instance taking the spring constant 1198961199041 =1000Nm in MEMS transfer function to verify the robuststability of the proposed 45th-order Sigma-Delta modulatorFigure 9 shows the root locus of the proposed 45th-orderSigma-Delta modulator with 1198961199041
Also taking 1198871 = 24 times 10minus2Nsm inMEMS transfer func-tion Figure 10 shows the root locus of the proposed 45th-order Sigma-Delta modulator with 1198871 = 24 times 10minus2Nsm
Simulation results show that the robust stability of thetwo sensing elements only presents an acceptable slightfluctuation which indicates that the proposed 45th-orderSigma-Delta modulator is robust to the sensitivity of MEMSdevices
Mathematical Problems in Engineering 7
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
Figure 9 Root locus of the 45th-order Sigma-Deltamodulatorwith1198961199041 = 1000Nm
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14minus1)Real axis (seconds
minus1)
Imag
inar
y ax
is (s
econ
ds
Figure 10 Root locus of the 45th-order Sigma-Delta modulatorwith 1198871 = 24 times 10minus2Nsm
6 Conclusions
A 45th-order Sigma-Delta modulator structure is proposedin this paper The proposed 45th-order Sigma-Delta modu-lator achieves SNR = 117647 dB in simulation and noise floorunder minus150 dB in frequency of 5ndash150Hz The simulated rootlocus shows improved stability compared to the pure integer-order system with good potential to progress further Thisstudy can promote the development of high performanceof MEMS accelerometer and also provides scientific andtechnical support for the application of fractional-ordertheory to practical system
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the research fund to the topscientific and technological innovation team from BeijingUniversity of Chemical Technology (no buctylkjcx06)
References
[1] B Lv P Wang D Wang J Liu and X Liu ldquoA high-performance closed-loop fourth-order sigma-delta micro-machined accelerometerrdquo Key Engineering Materials vol 503pp 134ndash138 2012
[2] X-C Luo and J Feng ldquoAmonolithicMEMSgyroscope interfacecircuit in 035120583m CMOSrdquo Tien Tzu Hsueh PaoActa ElectronicaSinica vol 42 no 9 pp 1868ndash1872 2014
[3] S Long Y Liu K He X Tang and Q Chen ldquo116 dBdynamic range CMOS readout circuit for MEMS capacitiveaccelerometerrdquo Journal of Semiconductors vol 35 no 9 ArticleID 095004 pp 1ndash5 2014
[4] M Keller A Buhmann M Ortmanns and Y Manoli ldquoAmethod for the discrete-time simulation of continuous-timesigma-delta modulatorsrdquo in Proceedings of the IEEE Interna-tional Symposium on Circuits and Systems ISCAS rsquo07 pp 241ndash244 New Orleans LA USA May 2007
[5] V P Petkov and B E Boser ldquoHigh-order electromechanicalmodulation in micromachined inertial sensorsrdquo IEEE Transac-tions on Circuits and Systems I Regular Papers vol 53 no 5 pp1016ndash1022 2006
[6] Y Dong M Kraft and C O Gollasch ldquoA high performanceaccelerometer with fifth order-modulatorrdquo in Proceedings ofthe 15th MicroMechanics Europe Workshop pp 41ndash44 MEWLeuven BE 2004
[7] C Lang and R Tielert ldquoA low noise accelerometer with digitalpid-type controller and multibit force feedbackrdquo in Proceedingsof the the 25th European Solid-State Circuits Conference ESS-CIRC rsquo99 pp 250ndash253 IEEE Duisburg Germany 1999
[8] M Caputo ldquoDistributed order differential equations modelingdielectric induction and diffusionrdquo Fractional Calculus andApplied Analysis vol 15 no 4 pp 421ndash442 2001
[9] Y Chen H Ahn and D Xue ldquoRobust controllability of intervalfractional order linear time invariant systemsrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences and Computers and Information in EngineeringConference pp 1ndash9 ASME Long Beach Calif USA 2005
[10] M Moze and J Sabatier ldquoLMI tools for stability analysis offractional systemsrdquo in Proceedings of the International DesignEngineering Technical Conferences and Computers and Informa-tion in Engineering Conference pp 1ndash9 ASME Boston MAUSA 2005
[11] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks (ICNN rsquo95) vol 4 pp 1942ndash1948 Perth WesternAustralia November-December 1995
[12] C Tricaud and Y Chen ldquoAn approximate method for numer-ically solving fractional order optimal control problems ofgeneral formrdquo Computers amp Mathematics with Applications AnInternational Journal vol 59 no 5 pp 1644ndash1655 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
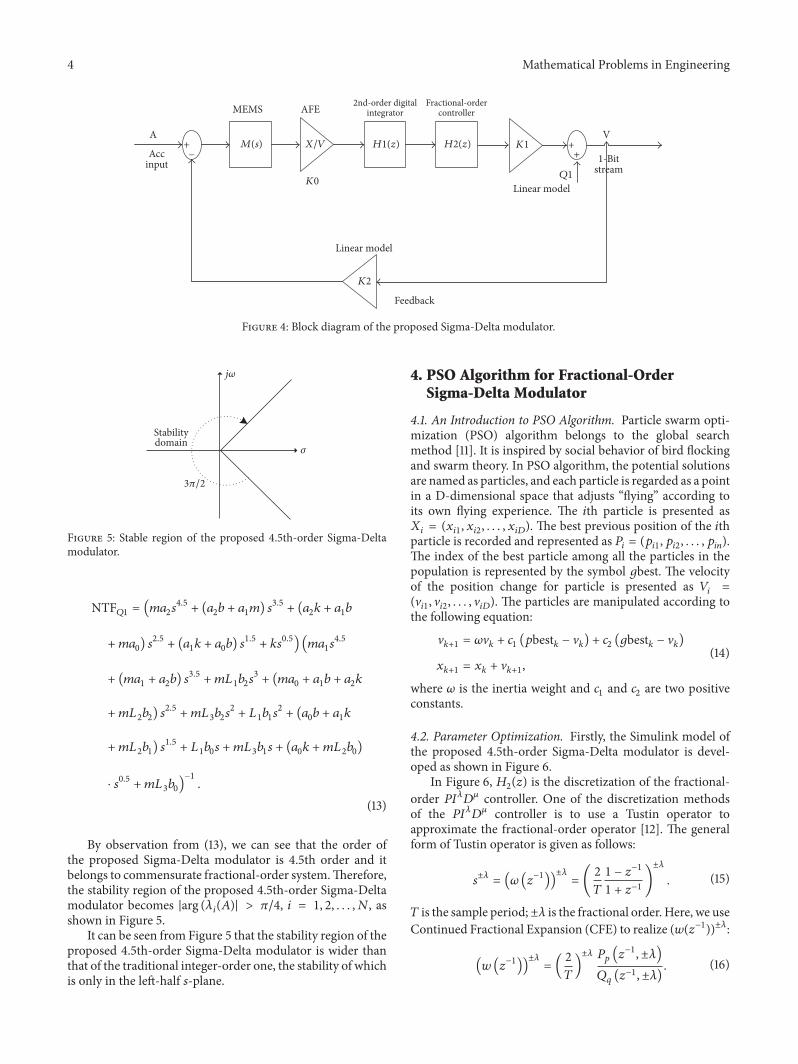
4 Mathematical Problems in Engineering
XV
AFEMEMS
K0
M(s)A
Feedback
Accinput 1-Bit
stream
V
Linear model
K2
K1
Q1
Linear model
2nd-order digitalintegrator
H1(z) H2(z)
Fractional-ordercontroller
+ ++minus
Figure 4 Block diagram of the proposed Sigma-Delta modulator
Stabilitydomain
j
32
Figure 5 Stable region of the proposed 45th-order Sigma-Deltamodulator
NTF1198761 = (119898119886211990445 + (1198862119887 + 1198861119898) 11990435 + (1198862119896 + 1198861119887+ 1198981198860) 11990425 + (1198861119896 + 1198860119887) 11990415 + 11989611990405) (119898119886111990445+ (1198981198861 + 1198862119887) 11990435 + 119898119871111988721199043 + (1198981198860 + 1198861119887 + 1198862119896+ 11989811987121198872) 11990425 + 119898119871311988721199042 + 119871111988711199042 + (1198860119887 + 1198861119896+ 11989811987121198871) 11990415 + 11987111198870119904 + 11989811987131198871119904 + (1198860119896 + 11989811987121198870)sdot 11990405 + 11989811987131198870)minus1
(13)
By observation from (13) we can see that the order ofthe proposed Sigma-Delta modulator is 45th order and itbelongs to commensurate fractional-order systemThereforethe stability region of the proposed 45th-order Sigma-Deltamodulator becomes |arg (120582119894(119860)| gt 1205874 119894 = 1 2 119873 asshown in Figure 5
It can be seen from Figure 5 that the stability region of theproposed 45th-order Sigma-Delta modulator is wider thanthat of the traditional integer-order one the stability of whichis only in the left-half 119904-plane
4 PSO Algorithm for Fractional-OrderSigma-Delta Modulator
41 An Introduction to PSO Algorithm Particle swarm opti-mization (PSO) algorithm belongs to the global searchmethod [11] It is inspired by social behavior of bird flockingand swarm theory In PSO algorithm the potential solutionsare named as particles and each particle is regarded as a pointin a D-dimensional space that adjusts ldquoflyingrdquo according toits own flying experience The 119894th particle is presented as119883119894 = (1199091198941 1199091198942 119909119894119863) The best previous position of the 119894thparticle is recorded and represented as 119875119894 = (1199011198941 1199011198942 119901119894119899)The index of the best particle among all the particles in thepopulation is represented by the symbol 119892best The velocityof the position change for particle is presented as 119881119894 =(V1198941 V1198942 V119894119863) The particles are manipulated according tothe following equation
V119896+1 = 120596V119896 + 1198881 (119901best119896 minus V119896) + 1198882 (119892best119896 minus V119896)119909119896+1 = 119909119896 + V119896+1 (14)
where 120596 is the inertia weight and 1198881 and 1198882 are two positiveconstants
42 Parameter Optimization Firstly the Simulink model ofthe proposed 45th-order Sigma-Delta modulator is devel-oped as shown in Figure 6
In Figure 6 1198672(119911) is the discretization of the fractional-order 119875119868120582119863120583 controller One of the discretization methodsof the 119875119868120582119863120583 controller is to use a Tustin operator toapproximate the fractional-order operator [12] The generalform of Tustin operator is given as follows
119904plusmn120582 = (120596 (119911minus1))plusmn120582 = ( 21198791 minus 119911minus11 + 119911minus1)
plusmn120582
(15)
119879 is the sample periodplusmn120582 is the fractional order Here we useContinued Fractional Expansion (CFE) to realize (119908(119911minus1))plusmn120582
(119908 (119911minus1))plusmn120582 = ( 2119879)plusmn120582 119875119901 (119911
minus1 plusmn120582)119876119902 (119911minus1 plusmn120582) (16)
Mathematical Problems in Engineering 5
MEMS
M(s)
Feedbackacceleration
Sine waveZero-order
hold AFETravel stops
XV
Signal 1
Second-orderdigital loop filter
H1(z) Compin
Toworkspace 1
Comparator
Output
ToworkspaceForcing voltage
minus37Signal 22
Volts to acc
Vacc2
Af
Toworkspace 4
Xpos
Toworkspace 2
Vs
Toworkspace 3
H2(z)
Fractional-ordercontroller
++
Figure 6 Simulink model of the 45th-order Sigma-Delta modulator
Table 1 Parameters of the proposed Sigma-Delta modulator
Parameter ValueProof mass119898 [mg] 20Damping coefficient 119887 [Nsm] 24 times 10minus3
Spring constant 119896 [Nm] 100AFE gain 1198960 [Vm] 455 times 107
Comparator gain 1198961 1Feedback gain 1198962 [ms2] 4905
The mechanism and steps of this approximation methodare presented in [12] For instance (119908(119911minus1))plusmn05 are approxi-mated as follows
(119908 (119911minus1))05
= 505961199114 minus 252981199113 minus 379481199112 + 1265119911 + 31621199114 + 051199113 minus 0751199112 minus 025119911 + 00625
(119908 (119911minus1))minus05
= 0001 times (21199114 + 11199113 minus 11199112 minus 005119911 + 01)1199114 minus 051199113 minus 0751199112 + 025119911 + 00625
(17)
The parameters of the proposed 45th-order Sigma-Deltamodulator are listed in Table 1
43 Steps of Parameter Optimization
(1) Selection of initial value of PSO algorithm here1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 and 119896119889 in (13) areoptimized by PSO algorithm hence we consider119883119894 =(1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 119896119889) as the position vector ofPSO algorithm for the proposed 45th-order Sigma-Delta modulator The individual numbers are 600corresponding to dimension 9 for the proposed 45th-order Sigma-Delta modulator and the iteration is setas 25 120596 = 095 and 1198881 = 1198882 = 2
(2) Objective function a typical objective for Sigma-Delta is high SNR which can be maximized and iscalculated based on the power spectral density of theoutput bit stream Therefore considering the highSNR as the objective of PSO algorithm is reasonableFor each individual simulation the SNR is calculatedby a function ldquocalcSNRrdquo available through the DeltaSigma Toolbox for Matlab
(3) Initializing 119883119894 = (1199091198941 1199091198942 119909119894119863) and 119881119894 =(V1198941 V1198942 V119894119863) in the optimal range and calculatingthe objective function
(4) Applying (14) to update119883119894 and 119881119894 and then to update119892best(5) Stopping of the iteration once the termination con-
dition is satisfied Otherwise procedure goes back tostep (3)
5 Simulation
51 Simulation Results Discussion The oversampling ratio(OSR) needs to be specified in the proposed 45th-orderSigma-Delta modulator Here we choose sample frequencyof 128 kHz and OSR = 64 In each individual procedure theSNR will be calculated when the Simulink model is running
In our numerical experiment The proposed 45th-orderSigma-Delta modulator achieved about 92 dB to 118 dB ofSNRby yielding the different values for119883119894Theoptimal valuesof119883119894 are selected as in Table 2
The corresponding SNR of the proposed 45th-orderSigma-Delta modulator is 117647 dB which is improved10x compared to only 4th-order Sigma-Delta modulatorThe PSD plot of the 45th-order Sigma-Delta modulator isalso built with selected coefficients and shown in Figure 7Compared to the 4th-order Sigma-Delta modulator the pro-posed 45th-order Sigma-Delta modulator not only performsbetter SNR but also has wider noise floor (bandwidth 115Hzin the 45th-order Sigma-Delta modulator and 103Hz inthe 4th-order Sigma-Delta modulator) and sharper slope
6 Mathematical Problems in Engineering
Table 2 The optimized parameters by PSO algorithm
Parameter Value1198862 minus20971198861 28441198860 minus93591198872 minus25171198871 20341198870 minus05168119896119901 0785119896119894 7426119896119889 0021
PSD
(dB)
115 Hz103 Hz
751 dBdecade
536 dBdecade
102 103 104101
Frequency (Hz)
minus200
minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
4th-order SDMN2 = 105163 dBS
45th-order SDMN2 = 117647 dBS
Figure 7 PSD of the 45th-order and the 4th-order Sigma-Deltamodulator
(amplitude gain 751 dBdecade in the 45th-order Sigma-Delta modulator and 536 dBdecade in the 4th-order Sigma-Delta modulator)
52 Stability and Robustness Analysis The fractional-orderdigital loop integrator of the proposed 45th-order Sigma-Delta modulator can be normalized as 119867(119904) Taking thelinearized parameters 1198960 1198961 and 1198962 and the major transferfunction 119872(119904) and 1198671(119904) and 1198672(119904) into (5) a fractional-order signal transfer function (STF) of the proposed 45th-order Sigma-Deltamodulator can be obtainedThe root locusmodels of the proposed 45th-order Sigma-Delta modulatorand 4th-order Sigma-Delta modulator are built and shown inFigure 8
Figure 8 shows that the proposed 45th-order Sigma-Delta modulator is stable In Figure 8(b) the root locus of the4th-order Sigma-Delta modulator passes through the right-half 119904-plane whereas the poles and zeros of the 45th-order
Root locus
P1
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
(a) 45th-order Sigma-Delta modulator
Root locus
P2
times104
times105
minus8
minus6
minus4
minus2
0
2
4
6
8
Imag
inar
y ax
is (s
econ
dsminus1)
0 05minus1 minus05minus2 minus15minus25minus1)Real axis (seconds
(b) 4th-order Sigma-Delta modulator
Figure 8 Root locus comparison between the 45th-order and 4th-order Sigma-Delta modulators
Sigma-Deltamodulator as shown in Figure 8(a) are allocatedalong the negative axis of the 119904-plane and the farthest poleachieves minus12 times 107 This leads to better stability of thedesigned 45th-order Sigma-Delta modulator
Similar results are also observed at root locus for para-metric yield errors such as different spring constant 119896 anddamping coefficient 119887 induced by manufacturing tolerancesof MEMS For instance taking the spring constant 1198961199041 =1000Nm in MEMS transfer function to verify the robuststability of the proposed 45th-order Sigma-Delta modulatorFigure 9 shows the root locus of the proposed 45th-orderSigma-Delta modulator with 1198961199041
Also taking 1198871 = 24 times 10minus2Nsm inMEMS transfer func-tion Figure 10 shows the root locus of the proposed 45th-order Sigma-Delta modulator with 1198871 = 24 times 10minus2Nsm
Simulation results show that the robust stability of thetwo sensing elements only presents an acceptable slightfluctuation which indicates that the proposed 45th-orderSigma-Delta modulator is robust to the sensitivity of MEMSdevices
Mathematical Problems in Engineering 7
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
Figure 9 Root locus of the 45th-order Sigma-Deltamodulatorwith1198961199041 = 1000Nm
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14minus1)Real axis (seconds
minus1)
Imag
inar
y ax
is (s
econ
ds
Figure 10 Root locus of the 45th-order Sigma-Delta modulatorwith 1198871 = 24 times 10minus2Nsm
6 Conclusions
A 45th-order Sigma-Delta modulator structure is proposedin this paper The proposed 45th-order Sigma-Delta modu-lator achieves SNR = 117647 dB in simulation and noise floorunder minus150 dB in frequency of 5ndash150Hz The simulated rootlocus shows improved stability compared to the pure integer-order system with good potential to progress further Thisstudy can promote the development of high performanceof MEMS accelerometer and also provides scientific andtechnical support for the application of fractional-ordertheory to practical system
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the research fund to the topscientific and technological innovation team from BeijingUniversity of Chemical Technology (no buctylkjcx06)
References
[1] B Lv P Wang D Wang J Liu and X Liu ldquoA high-performance closed-loop fourth-order sigma-delta micro-machined accelerometerrdquo Key Engineering Materials vol 503pp 134ndash138 2012
[2] X-C Luo and J Feng ldquoAmonolithicMEMSgyroscope interfacecircuit in 035120583m CMOSrdquo Tien Tzu Hsueh PaoActa ElectronicaSinica vol 42 no 9 pp 1868ndash1872 2014
[3] S Long Y Liu K He X Tang and Q Chen ldquo116 dBdynamic range CMOS readout circuit for MEMS capacitiveaccelerometerrdquo Journal of Semiconductors vol 35 no 9 ArticleID 095004 pp 1ndash5 2014
[4] M Keller A Buhmann M Ortmanns and Y Manoli ldquoAmethod for the discrete-time simulation of continuous-timesigma-delta modulatorsrdquo in Proceedings of the IEEE Interna-tional Symposium on Circuits and Systems ISCAS rsquo07 pp 241ndash244 New Orleans LA USA May 2007
[5] V P Petkov and B E Boser ldquoHigh-order electromechanicalmodulation in micromachined inertial sensorsrdquo IEEE Transac-tions on Circuits and Systems I Regular Papers vol 53 no 5 pp1016ndash1022 2006
[6] Y Dong M Kraft and C O Gollasch ldquoA high performanceaccelerometer with fifth order-modulatorrdquo in Proceedings ofthe 15th MicroMechanics Europe Workshop pp 41ndash44 MEWLeuven BE 2004
[7] C Lang and R Tielert ldquoA low noise accelerometer with digitalpid-type controller and multibit force feedbackrdquo in Proceedingsof the the 25th European Solid-State Circuits Conference ESS-CIRC rsquo99 pp 250ndash253 IEEE Duisburg Germany 1999
[8] M Caputo ldquoDistributed order differential equations modelingdielectric induction and diffusionrdquo Fractional Calculus andApplied Analysis vol 15 no 4 pp 421ndash442 2001
[9] Y Chen H Ahn and D Xue ldquoRobust controllability of intervalfractional order linear time invariant systemsrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences and Computers and Information in EngineeringConference pp 1ndash9 ASME Long Beach Calif USA 2005
[10] M Moze and J Sabatier ldquoLMI tools for stability analysis offractional systemsrdquo in Proceedings of the International DesignEngineering Technical Conferences and Computers and Informa-tion in Engineering Conference pp 1ndash9 ASME Boston MAUSA 2005
[11] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks (ICNN rsquo95) vol 4 pp 1942ndash1948 Perth WesternAustralia November-December 1995
[12] C Tricaud and Y Chen ldquoAn approximate method for numer-ically solving fractional order optimal control problems ofgeneral formrdquo Computers amp Mathematics with Applications AnInternational Journal vol 59 no 5 pp 1644ndash1655 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
MEMS
M(s)
Feedbackacceleration
Sine waveZero-order
hold AFETravel stops
XV
Signal 1
Second-orderdigital loop filter
H1(z) Compin
Toworkspace 1
Comparator
Output
ToworkspaceForcing voltage
minus37Signal 22
Volts to acc
Vacc2
Af
Toworkspace 4
Xpos
Toworkspace 2
Vs
Toworkspace 3
H2(z)
Fractional-ordercontroller
++
Figure 6 Simulink model of the 45th-order Sigma-Delta modulator
Table 1 Parameters of the proposed Sigma-Delta modulator
Parameter ValueProof mass119898 [mg] 20Damping coefficient 119887 [Nsm] 24 times 10minus3
Spring constant 119896 [Nm] 100AFE gain 1198960 [Vm] 455 times 107
Comparator gain 1198961 1Feedback gain 1198962 [ms2] 4905
The mechanism and steps of this approximation methodare presented in [12] For instance (119908(119911minus1))plusmn05 are approxi-mated as follows
(119908 (119911minus1))05
= 505961199114 minus 252981199113 minus 379481199112 + 1265119911 + 31621199114 + 051199113 minus 0751199112 minus 025119911 + 00625
(119908 (119911minus1))minus05
= 0001 times (21199114 + 11199113 minus 11199112 minus 005119911 + 01)1199114 minus 051199113 minus 0751199112 + 025119911 + 00625
(17)
The parameters of the proposed 45th-order Sigma-Deltamodulator are listed in Table 1
43 Steps of Parameter Optimization
(1) Selection of initial value of PSO algorithm here1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 and 119896119889 in (13) areoptimized by PSO algorithm hence we consider119883119894 =(1198862 1198861 1198860 1198872 1198871 1198870 119896119901 119896119894 119896119889) as the position vector ofPSO algorithm for the proposed 45th-order Sigma-Delta modulator The individual numbers are 600corresponding to dimension 9 for the proposed 45th-order Sigma-Delta modulator and the iteration is setas 25 120596 = 095 and 1198881 = 1198882 = 2
(2) Objective function a typical objective for Sigma-Delta is high SNR which can be maximized and iscalculated based on the power spectral density of theoutput bit stream Therefore considering the highSNR as the objective of PSO algorithm is reasonableFor each individual simulation the SNR is calculatedby a function ldquocalcSNRrdquo available through the DeltaSigma Toolbox for Matlab
(3) Initializing 119883119894 = (1199091198941 1199091198942 119909119894119863) and 119881119894 =(V1198941 V1198942 V119894119863) in the optimal range and calculatingthe objective function
(4) Applying (14) to update119883119894 and 119881119894 and then to update119892best(5) Stopping of the iteration once the termination con-
dition is satisfied Otherwise procedure goes back tostep (3)
5 Simulation
51 Simulation Results Discussion The oversampling ratio(OSR) needs to be specified in the proposed 45th-orderSigma-Delta modulator Here we choose sample frequencyof 128 kHz and OSR = 64 In each individual procedure theSNR will be calculated when the Simulink model is running
In our numerical experiment The proposed 45th-orderSigma-Delta modulator achieved about 92 dB to 118 dB ofSNRby yielding the different values for119883119894Theoptimal valuesof119883119894 are selected as in Table 2
The corresponding SNR of the proposed 45th-orderSigma-Delta modulator is 117647 dB which is improved10x compared to only 4th-order Sigma-Delta modulatorThe PSD plot of the 45th-order Sigma-Delta modulator isalso built with selected coefficients and shown in Figure 7Compared to the 4th-order Sigma-Delta modulator the pro-posed 45th-order Sigma-Delta modulator not only performsbetter SNR but also has wider noise floor (bandwidth 115Hzin the 45th-order Sigma-Delta modulator and 103Hz inthe 4th-order Sigma-Delta modulator) and sharper slope
6 Mathematical Problems in Engineering
Table 2 The optimized parameters by PSO algorithm
Parameter Value1198862 minus20971198861 28441198860 minus93591198872 minus25171198871 20341198870 minus05168119896119901 0785119896119894 7426119896119889 0021
PSD
(dB)
115 Hz103 Hz
751 dBdecade
536 dBdecade
102 103 104101
Frequency (Hz)
minus200
minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
4th-order SDMN2 = 105163 dBS
45th-order SDMN2 = 117647 dBS
Figure 7 PSD of the 45th-order and the 4th-order Sigma-Deltamodulator
(amplitude gain 751 dBdecade in the 45th-order Sigma-Delta modulator and 536 dBdecade in the 4th-order Sigma-Delta modulator)
52 Stability and Robustness Analysis The fractional-orderdigital loop integrator of the proposed 45th-order Sigma-Delta modulator can be normalized as 119867(119904) Taking thelinearized parameters 1198960 1198961 and 1198962 and the major transferfunction 119872(119904) and 1198671(119904) and 1198672(119904) into (5) a fractional-order signal transfer function (STF) of the proposed 45th-order Sigma-Deltamodulator can be obtainedThe root locusmodels of the proposed 45th-order Sigma-Delta modulatorand 4th-order Sigma-Delta modulator are built and shown inFigure 8
Figure 8 shows that the proposed 45th-order Sigma-Delta modulator is stable In Figure 8(b) the root locus of the4th-order Sigma-Delta modulator passes through the right-half 119904-plane whereas the poles and zeros of the 45th-order
Root locus
P1
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
(a) 45th-order Sigma-Delta modulator
Root locus
P2
times104
times105
minus8
minus6
minus4
minus2
0
2
4
6
8
Imag
inar
y ax
is (s
econ
dsminus1)
0 05minus1 minus05minus2 minus15minus25minus1)Real axis (seconds
(b) 4th-order Sigma-Delta modulator
Figure 8 Root locus comparison between the 45th-order and 4th-order Sigma-Delta modulators
Sigma-Deltamodulator as shown in Figure 8(a) are allocatedalong the negative axis of the 119904-plane and the farthest poleachieves minus12 times 107 This leads to better stability of thedesigned 45th-order Sigma-Delta modulator
Similar results are also observed at root locus for para-metric yield errors such as different spring constant 119896 anddamping coefficient 119887 induced by manufacturing tolerancesof MEMS For instance taking the spring constant 1198961199041 =1000Nm in MEMS transfer function to verify the robuststability of the proposed 45th-order Sigma-Delta modulatorFigure 9 shows the root locus of the proposed 45th-orderSigma-Delta modulator with 1198961199041
Also taking 1198871 = 24 times 10minus2Nsm inMEMS transfer func-tion Figure 10 shows the root locus of the proposed 45th-order Sigma-Delta modulator with 1198871 = 24 times 10minus2Nsm
Simulation results show that the robust stability of thetwo sensing elements only presents an acceptable slightfluctuation which indicates that the proposed 45th-orderSigma-Delta modulator is robust to the sensitivity of MEMSdevices
Mathematical Problems in Engineering 7
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
Figure 9 Root locus of the 45th-order Sigma-Deltamodulatorwith1198961199041 = 1000Nm
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14minus1)Real axis (seconds
minus1)
Imag
inar
y ax
is (s
econ
ds
Figure 10 Root locus of the 45th-order Sigma-Delta modulatorwith 1198871 = 24 times 10minus2Nsm
6 Conclusions
A 45th-order Sigma-Delta modulator structure is proposedin this paper The proposed 45th-order Sigma-Delta modu-lator achieves SNR = 117647 dB in simulation and noise floorunder minus150 dB in frequency of 5ndash150Hz The simulated rootlocus shows improved stability compared to the pure integer-order system with good potential to progress further Thisstudy can promote the development of high performanceof MEMS accelerometer and also provides scientific andtechnical support for the application of fractional-ordertheory to practical system
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the research fund to the topscientific and technological innovation team from BeijingUniversity of Chemical Technology (no buctylkjcx06)
References
[1] B Lv P Wang D Wang J Liu and X Liu ldquoA high-performance closed-loop fourth-order sigma-delta micro-machined accelerometerrdquo Key Engineering Materials vol 503pp 134ndash138 2012
[2] X-C Luo and J Feng ldquoAmonolithicMEMSgyroscope interfacecircuit in 035120583m CMOSrdquo Tien Tzu Hsueh PaoActa ElectronicaSinica vol 42 no 9 pp 1868ndash1872 2014
[3] S Long Y Liu K He X Tang and Q Chen ldquo116 dBdynamic range CMOS readout circuit for MEMS capacitiveaccelerometerrdquo Journal of Semiconductors vol 35 no 9 ArticleID 095004 pp 1ndash5 2014
[4] M Keller A Buhmann M Ortmanns and Y Manoli ldquoAmethod for the discrete-time simulation of continuous-timesigma-delta modulatorsrdquo in Proceedings of the IEEE Interna-tional Symposium on Circuits and Systems ISCAS rsquo07 pp 241ndash244 New Orleans LA USA May 2007
[5] V P Petkov and B E Boser ldquoHigh-order electromechanicalmodulation in micromachined inertial sensorsrdquo IEEE Transac-tions on Circuits and Systems I Regular Papers vol 53 no 5 pp1016ndash1022 2006
[6] Y Dong M Kraft and C O Gollasch ldquoA high performanceaccelerometer with fifth order-modulatorrdquo in Proceedings ofthe 15th MicroMechanics Europe Workshop pp 41ndash44 MEWLeuven BE 2004
[7] C Lang and R Tielert ldquoA low noise accelerometer with digitalpid-type controller and multibit force feedbackrdquo in Proceedingsof the the 25th European Solid-State Circuits Conference ESS-CIRC rsquo99 pp 250ndash253 IEEE Duisburg Germany 1999
[8] M Caputo ldquoDistributed order differential equations modelingdielectric induction and diffusionrdquo Fractional Calculus andApplied Analysis vol 15 no 4 pp 421ndash442 2001
[9] Y Chen H Ahn and D Xue ldquoRobust controllability of intervalfractional order linear time invariant systemsrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences and Computers and Information in EngineeringConference pp 1ndash9 ASME Long Beach Calif USA 2005
[10] M Moze and J Sabatier ldquoLMI tools for stability analysis offractional systemsrdquo in Proceedings of the International DesignEngineering Technical Conferences and Computers and Informa-tion in Engineering Conference pp 1ndash9 ASME Boston MAUSA 2005
[11] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks (ICNN rsquo95) vol 4 pp 1942ndash1948 Perth WesternAustralia November-December 1995
[12] C Tricaud and Y Chen ldquoAn approximate method for numer-ically solving fractional order optimal control problems ofgeneral formrdquo Computers amp Mathematics with Applications AnInternational Journal vol 59 no 5 pp 1644ndash1655 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
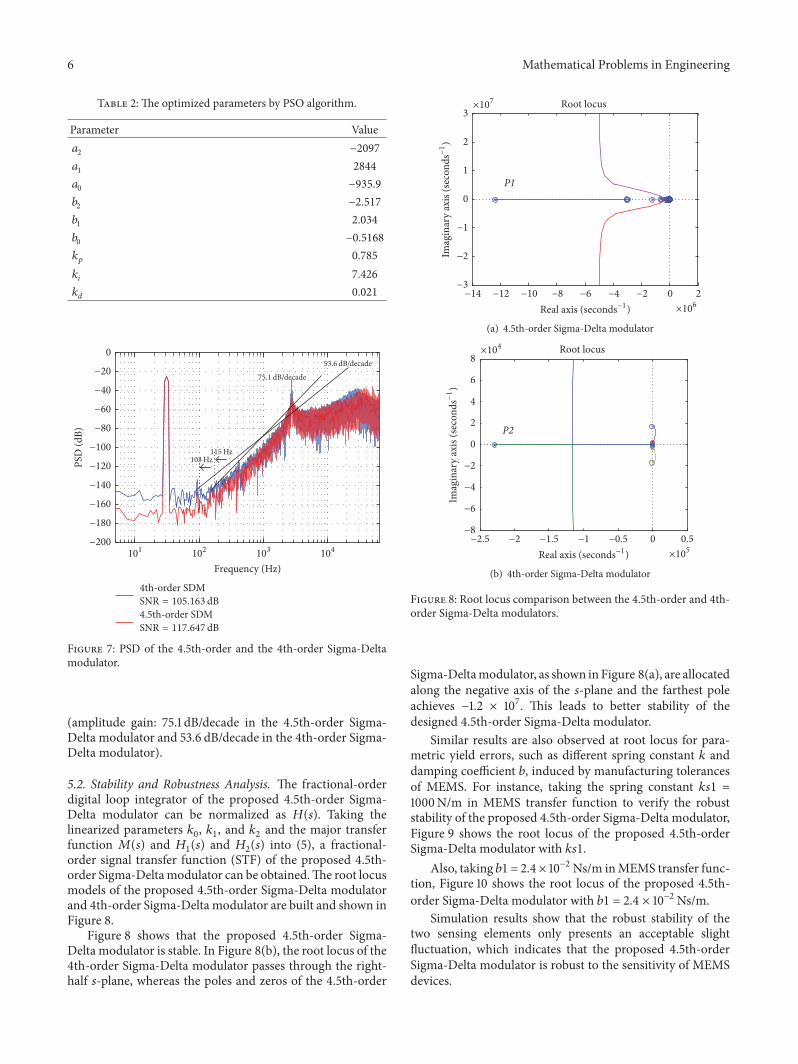
6 Mathematical Problems in Engineering
Table 2 The optimized parameters by PSO algorithm
Parameter Value1198862 minus20971198861 28441198860 minus93591198872 minus25171198871 20341198870 minus05168119896119901 0785119896119894 7426119896119889 0021
PSD
(dB)
115 Hz103 Hz
751 dBdecade
536 dBdecade
102 103 104101
Frequency (Hz)
minus200
minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
4th-order SDMN2 = 105163 dBS
45th-order SDMN2 = 117647 dBS
Figure 7 PSD of the 45th-order and the 4th-order Sigma-Deltamodulator
(amplitude gain 751 dBdecade in the 45th-order Sigma-Delta modulator and 536 dBdecade in the 4th-order Sigma-Delta modulator)
52 Stability and Robustness Analysis The fractional-orderdigital loop integrator of the proposed 45th-order Sigma-Delta modulator can be normalized as 119867(119904) Taking thelinearized parameters 1198960 1198961 and 1198962 and the major transferfunction 119872(119904) and 1198671(119904) and 1198672(119904) into (5) a fractional-order signal transfer function (STF) of the proposed 45th-order Sigma-Deltamodulator can be obtainedThe root locusmodels of the proposed 45th-order Sigma-Delta modulatorand 4th-order Sigma-Delta modulator are built and shown inFigure 8
Figure 8 shows that the proposed 45th-order Sigma-Delta modulator is stable In Figure 8(b) the root locus of the4th-order Sigma-Delta modulator passes through the right-half 119904-plane whereas the poles and zeros of the 45th-order
Root locus
P1
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
(a) 45th-order Sigma-Delta modulator
Root locus
P2
times104
times105
minus8
minus6
minus4
minus2
0
2
4
6
8
Imag
inar
y ax
is (s
econ
dsminus1)
0 05minus1 minus05minus2 minus15minus25minus1)Real axis (seconds
(b) 4th-order Sigma-Delta modulator
Figure 8 Root locus comparison between the 45th-order and 4th-order Sigma-Delta modulators
Sigma-Deltamodulator as shown in Figure 8(a) are allocatedalong the negative axis of the 119904-plane and the farthest poleachieves minus12 times 107 This leads to better stability of thedesigned 45th-order Sigma-Delta modulator
Similar results are also observed at root locus for para-metric yield errors such as different spring constant 119896 anddamping coefficient 119887 induced by manufacturing tolerancesof MEMS For instance taking the spring constant 1198961199041 =1000Nm in MEMS transfer function to verify the robuststability of the proposed 45th-order Sigma-Delta modulatorFigure 9 shows the root locus of the proposed 45th-orderSigma-Delta modulator with 1198961199041
Also taking 1198871 = 24 times 10minus2Nsm inMEMS transfer func-tion Figure 10 shows the root locus of the proposed 45th-order Sigma-Delta modulator with 1198871 = 24 times 10minus2Nsm
Simulation results show that the robust stability of thetwo sensing elements only presents an acceptable slightfluctuation which indicates that the proposed 45th-orderSigma-Delta modulator is robust to the sensitivity of MEMSdevices
Mathematical Problems in Engineering 7
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
Figure 9 Root locus of the 45th-order Sigma-Deltamodulatorwith1198961199041 = 1000Nm
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14minus1)Real axis (seconds
minus1)
Imag
inar
y ax
is (s
econ
ds
Figure 10 Root locus of the 45th-order Sigma-Delta modulatorwith 1198871 = 24 times 10minus2Nsm
6 Conclusions
A 45th-order Sigma-Delta modulator structure is proposedin this paper The proposed 45th-order Sigma-Delta modu-lator achieves SNR = 117647 dB in simulation and noise floorunder minus150 dB in frequency of 5ndash150Hz The simulated rootlocus shows improved stability compared to the pure integer-order system with good potential to progress further Thisstudy can promote the development of high performanceof MEMS accelerometer and also provides scientific andtechnical support for the application of fractional-ordertheory to practical system
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the research fund to the topscientific and technological innovation team from BeijingUniversity of Chemical Technology (no buctylkjcx06)
References
[1] B Lv P Wang D Wang J Liu and X Liu ldquoA high-performance closed-loop fourth-order sigma-delta micro-machined accelerometerrdquo Key Engineering Materials vol 503pp 134ndash138 2012
[2] X-C Luo and J Feng ldquoAmonolithicMEMSgyroscope interfacecircuit in 035120583m CMOSrdquo Tien Tzu Hsueh PaoActa ElectronicaSinica vol 42 no 9 pp 1868ndash1872 2014
[3] S Long Y Liu K He X Tang and Q Chen ldquo116 dBdynamic range CMOS readout circuit for MEMS capacitiveaccelerometerrdquo Journal of Semiconductors vol 35 no 9 ArticleID 095004 pp 1ndash5 2014
[4] M Keller A Buhmann M Ortmanns and Y Manoli ldquoAmethod for the discrete-time simulation of continuous-timesigma-delta modulatorsrdquo in Proceedings of the IEEE Interna-tional Symposium on Circuits and Systems ISCAS rsquo07 pp 241ndash244 New Orleans LA USA May 2007
[5] V P Petkov and B E Boser ldquoHigh-order electromechanicalmodulation in micromachined inertial sensorsrdquo IEEE Transac-tions on Circuits and Systems I Regular Papers vol 53 no 5 pp1016ndash1022 2006
[6] Y Dong M Kraft and C O Gollasch ldquoA high performanceaccelerometer with fifth order-modulatorrdquo in Proceedings ofthe 15th MicroMechanics Europe Workshop pp 41ndash44 MEWLeuven BE 2004
[7] C Lang and R Tielert ldquoA low noise accelerometer with digitalpid-type controller and multibit force feedbackrdquo in Proceedingsof the the 25th European Solid-State Circuits Conference ESS-CIRC rsquo99 pp 250ndash253 IEEE Duisburg Germany 1999
[8] M Caputo ldquoDistributed order differential equations modelingdielectric induction and diffusionrdquo Fractional Calculus andApplied Analysis vol 15 no 4 pp 421ndash442 2001
[9] Y Chen H Ahn and D Xue ldquoRobust controllability of intervalfractional order linear time invariant systemsrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences and Computers and Information in EngineeringConference pp 1ndash9 ASME Long Beach Calif USA 2005
[10] M Moze and J Sabatier ldquoLMI tools for stability analysis offractional systemsrdquo in Proceedings of the International DesignEngineering Technical Conferences and Computers and Informa-tion in Engineering Conference pp 1ndash9 ASME Boston MAUSA 2005
[11] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks (ICNN rsquo95) vol 4 pp 1942ndash1948 Perth WesternAustralia November-December 1995
[12] C Tricaud and Y Chen ldquoAn approximate method for numer-ically solving fractional order optimal control problems ofgeneral formrdquo Computers amp Mathematics with Applications AnInternational Journal vol 59 no 5 pp 1644ndash1655 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
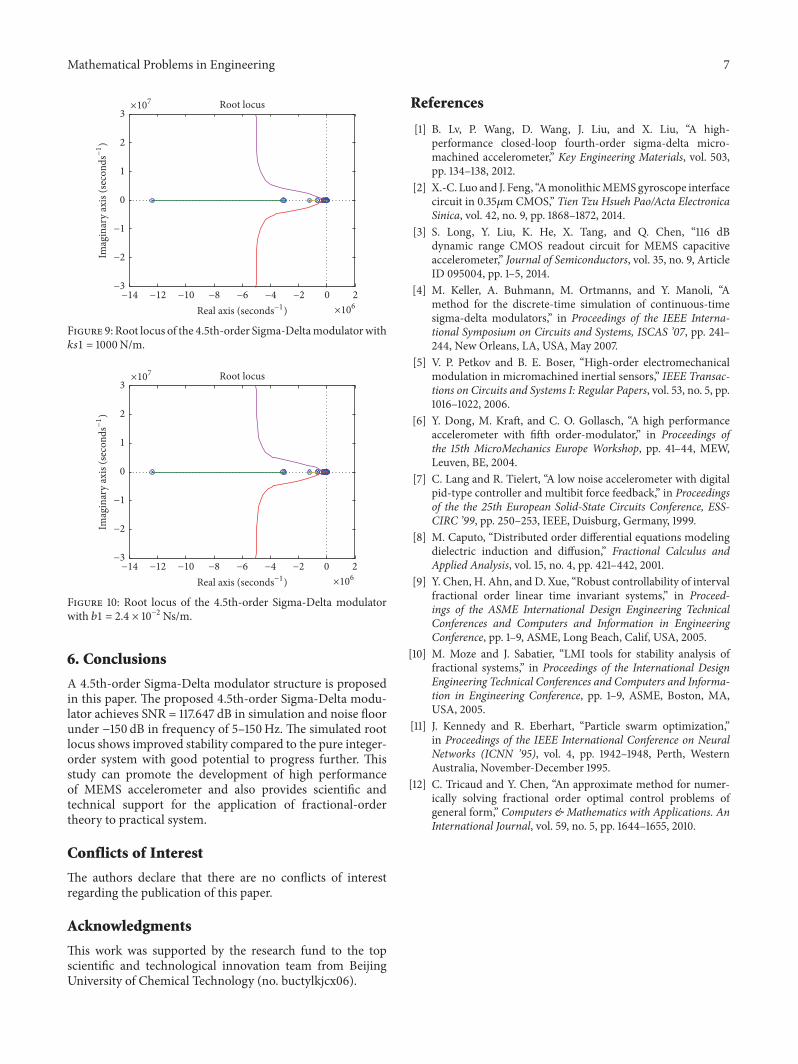
Mathematical Problems in Engineering 7
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14
minus1)
Imag
inar
y ax
is (s
econ
ds
minus1)Real axis (seconds
Figure 9 Root locus of the 45th-order Sigma-Deltamodulatorwith1198961199041 = 1000Nm
Root locus
times106
times107
minus3
minus2
minus1
0
1
2
3
0 2minus8 minus6 minus4 minus2minus12 minus10minus14minus1)Real axis (seconds
minus1)
Imag
inar
y ax
is (s
econ
ds
Figure 10 Root locus of the 45th-order Sigma-Delta modulatorwith 1198871 = 24 times 10minus2Nsm
6 Conclusions
A 45th-order Sigma-Delta modulator structure is proposedin this paper The proposed 45th-order Sigma-Delta modu-lator achieves SNR = 117647 dB in simulation and noise floorunder minus150 dB in frequency of 5ndash150Hz The simulated rootlocus shows improved stability compared to the pure integer-order system with good potential to progress further Thisstudy can promote the development of high performanceof MEMS accelerometer and also provides scientific andtechnical support for the application of fractional-ordertheory to practical system
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the research fund to the topscientific and technological innovation team from BeijingUniversity of Chemical Technology (no buctylkjcx06)
References
[1] B Lv P Wang D Wang J Liu and X Liu ldquoA high-performance closed-loop fourth-order sigma-delta micro-machined accelerometerrdquo Key Engineering Materials vol 503pp 134ndash138 2012
[2] X-C Luo and J Feng ldquoAmonolithicMEMSgyroscope interfacecircuit in 035120583m CMOSrdquo Tien Tzu Hsueh PaoActa ElectronicaSinica vol 42 no 9 pp 1868ndash1872 2014
[3] S Long Y Liu K He X Tang and Q Chen ldquo116 dBdynamic range CMOS readout circuit for MEMS capacitiveaccelerometerrdquo Journal of Semiconductors vol 35 no 9 ArticleID 095004 pp 1ndash5 2014
[4] M Keller A Buhmann M Ortmanns and Y Manoli ldquoAmethod for the discrete-time simulation of continuous-timesigma-delta modulatorsrdquo in Proceedings of the IEEE Interna-tional Symposium on Circuits and Systems ISCAS rsquo07 pp 241ndash244 New Orleans LA USA May 2007
[5] V P Petkov and B E Boser ldquoHigh-order electromechanicalmodulation in micromachined inertial sensorsrdquo IEEE Transac-tions on Circuits and Systems I Regular Papers vol 53 no 5 pp1016ndash1022 2006
[6] Y Dong M Kraft and C O Gollasch ldquoA high performanceaccelerometer with fifth order-modulatorrdquo in Proceedings ofthe 15th MicroMechanics Europe Workshop pp 41ndash44 MEWLeuven BE 2004
[7] C Lang and R Tielert ldquoA low noise accelerometer with digitalpid-type controller and multibit force feedbackrdquo in Proceedingsof the the 25th European Solid-State Circuits Conference ESS-CIRC rsquo99 pp 250ndash253 IEEE Duisburg Germany 1999
[8] M Caputo ldquoDistributed order differential equations modelingdielectric induction and diffusionrdquo Fractional Calculus andApplied Analysis vol 15 no 4 pp 421ndash442 2001
[9] Y Chen H Ahn and D Xue ldquoRobust controllability of intervalfractional order linear time invariant systemsrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences and Computers and Information in EngineeringConference pp 1ndash9 ASME Long Beach Calif USA 2005
[10] M Moze and J Sabatier ldquoLMI tools for stability analysis offractional systemsrdquo in Proceedings of the International DesignEngineering Technical Conferences and Computers and Informa-tion in Engineering Conference pp 1ndash9 ASME Boston MAUSA 2005
[11] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks (ICNN rsquo95) vol 4 pp 1942ndash1948 Perth WesternAustralia November-December 1995
[12] C Tricaud and Y Chen ldquoAn approximate method for numer-ically solving fractional order optimal control problems ofgeneral formrdquo Computers amp Mathematics with Applications AnInternational Journal vol 59 no 5 pp 1644ndash1655 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Related Documents











