A novel gossip-based sensing coverage algorithm for dense wireless sensor networks Vinh Tran-Quang a, * , Takumi Miyoshi a,b a Graduate School of Engineering, Shibaura Institute of Technology, Saitama 337-8570, Japan b College of Systems Engineering and Science, Shibaura Institute of Technology, Saitama 337-8570, Japan article info Article history: Available online 17 April 2009 Keywords: Algorithm Energy efficiency Gossip-based Sensing coverage Routing protocol Wireless sensor networks abstract Wireless sensor networks (WSNs) have been widely studied and usefully employed in many applications such as monitoring environments and embedded systems. WSNs consist of many nodes spread randomly over a wide area; therefore, the sensing regions of differ- ent nodes may overlap partially. This is called the ‘‘sensing coverage problem”. In this paper, we define a maximum sensing coverage region (MSCR) problem and present a novel gossip-based sensing-coverage-aware algorithm to solve the problem. In the algorithm, sensor nodes gossip with their neighbors about their sensing coverage region. In this way, nodes decide locally to forward packets (as an active node) or to disregard packets (as a sleeping or redundant node). Being sensing-coverage-aware, the redundant node can cut back on its activities whenever its sensing region is k-covered by enough neighbors. With the distributed and low-overhead traffic benefits of gossip, we spread energy con- sumption to different sensor nodes, achieve maximum sensing coverage with minimal energy consumption in each individual sensor node, and prolong the whole network life- time. We apply our algorithm to improve LEACH, a clustering routing protocol for WSNs, and develop a simulation to evaluate the performance of the algorithm. Ó 2009 Elsevier B.V. All rights reserved. 1. Introduction Wireless sensor networks are usually self-organized ad hoc networks consisting of a large number of wireless sen- sor nodes with small size, low battery capacity, low pro- cessing power, limited buffer capacity, and a low-power radio. Sensor nodes collaborate using wireless communica- tions with an asymmetric many-to-one data transfer mod- el. Typically, they send their sensed events or data, by a specific communication protocol, to a specific node called the sink node or base station, which collects the requested information. WSNs are primarily designed for monitoring environments that humans cannot easily reach (e.g., mo- tion, target tracking, fire detection, chemicals, tempera- ture); they are used as embedded systems (e.g., biomedical sensor engineering, smart homes) or mobile applications (e.g., when attached to robots, soldiers, or vehicles). In wireless sensor networks, sensor nodes are usually battery-powered, but it is not practical to recharge or replace the batteries of all the sensors, because either the number of sensor nodes is too large, or the nodes are in remote, battlefield, desert or hostile areas. Energy loss could destroy important information, isolate sensor nodes, or even partition and disconnect the entire network. Once deployed, however, most applications of sensor networks expect a long system lifetime. The energy expenditure of sensors has to be wisely managed by their architectures and protocols to prolong the overall network lifetime. Therefore, energy efficiency is the essential requirement in WSNs. In order to achieve better system performance and pro- vide monitoring capabilities, in many applications, thou- sands of sensor nodes are generally densely deployed— mostly at random—to ensure that the area of interest is 1389-1286/$ - see front matter Ó 2009 Elsevier B.V. All rights reserved. doi:10.1016/j.comnet.2009.04.003 * Corresponding author. Tel.: +81 080 5474 3086; fax: +81 48 687 5816. E-mail addresses: [email protected] (V. Tran-Quang), [email protected] (T. Miyoshi). Computer Networks 53 (2009) 2275–2287 Contents lists available at ScienceDirect Computer Networks journal homepage: www.elsevier.com/locate/comnet

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Computer Networks 53 (2009) 2275–2287
Contents lists available at ScienceDirect
Computer Networks
journal homepage: www.elsevier .com/ locate/comnet
A novel gossip-based sensing coverage algorithmfor dense wireless sensor networks
Vinh Tran-Quang a,*, Takumi Miyoshi a,b
a Graduate School of Engineering, Shibaura Institute of Technology, Saitama 337-8570, Japanb College of Systems Engineering and Science, Shibaura Institute of Technology, Saitama 337-8570, Japan
a r t i c l e i n f o a b s t r a c t
Article history:Available online 17 April 2009
Keywords:AlgorithmEnergy efficiencyGossip-basedSensing coverageRouting protocolWireless sensor networks
1389-1286/$ - see front matter � 2009 Elsevier B.Vdoi:10.1016/j.comnet.2009.04.003
* Corresponding author. Tel.: +81 080 5474 3086;E-mail addresses: [email protected]
[email protected] (T. Miyoshi).
Wireless sensor networks (WSNs) have been widely studied and usefully employed inmany applications such as monitoring environments and embedded systems. WSNs consistof many nodes spread randomly over a wide area; therefore, the sensing regions of differ-ent nodes may overlap partially. This is called the ‘‘sensing coverage problem”. In thispaper, we define a maximum sensing coverage region (MSCR) problem and present a novelgossip-based sensing-coverage-aware algorithm to solve the problem. In the algorithm,sensor nodes gossip with their neighbors about their sensing coverage region. In thisway, nodes decide locally to forward packets (as an active node) or to disregard packets(as a sleeping or redundant node). Being sensing-coverage-aware, the redundant nodecan cut back on its activities whenever its sensing region is k-covered by enough neighbors.With the distributed and low-overhead traffic benefits of gossip, we spread energy con-sumption to different sensor nodes, achieve maximum sensing coverage with minimalenergy consumption in each individual sensor node, and prolong the whole network life-time. We apply our algorithm to improve LEACH, a clustering routing protocol for WSNs,and develop a simulation to evaluate the performance of the algorithm.
� 2009 Elsevier B.V. All rights reserved.
1. Introduction
Wireless sensor networks are usually self-organized adhoc networks consisting of a large number of wireless sen-sor nodes with small size, low battery capacity, low pro-cessing power, limited buffer capacity, and a low-powerradio. Sensor nodes collaborate using wireless communica-tions with an asymmetric many-to-one data transfer mod-el. Typically, they send their sensed events or data, by aspecific communication protocol, to a specific node calledthe sink node or base station, which collects the requestedinformation. WSNs are primarily designed for monitoringenvironments that humans cannot easily reach (e.g., mo-tion, target tracking, fire detection, chemicals, tempera-ture); they are used as embedded systems (e.g.,
. All rights reserved.
fax: +81 48 687 5816.(V. Tran-Quang),
biomedical sensor engineering, smart homes) or mobileapplications (e.g., when attached to robots, soldiers, orvehicles). In wireless sensor networks, sensor nodes areusually battery-powered, but it is not practical to rechargeor replace the batteries of all the sensors, because eitherthe number of sensor nodes is too large, or the nodes arein remote, battlefield, desert or hostile areas. Energy losscould destroy important information, isolate sensor nodes,or even partition and disconnect the entire network. Oncedeployed, however, most applications of sensor networksexpect a long system lifetime. The energy expenditure ofsensors has to be wisely managed by their architecturesand protocols to prolong the overall network lifetime.Therefore, energy efficiency is the essential requirementin WSNs.
In order to achieve better system performance and pro-vide monitoring capabilities, in many applications, thou-sands of sensor nodes are generally densely deployed—mostly at random—to ensure that the area of interest is

2276 V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287
completely or sufficiently covered and to increase sensingreliability. Some of them are very close to or inside a phe-nomenon to be observed. Therefore, in a dense network,the sensing areas of different nodes may be similar andoverlap with those of neighboring nodes. It is importantto place or select them so that the monitored area is cov-ered as much as possible without diminishing the overallsystem coverage. This is known as the ‘‘sensing coverageproblem” and leads to the main goal of achieving maxi-mum sensing coverage with minimal energy consumptionin the design and implementation of routing protocols forWSNs.
The sensing coverage problem also appears in practiceas we implement the ARPEES [1,2], and LEACH [3] proto-cols. The average amount of residual energy decreasesquickly with both the LEACH and ARPEES protocols at net-work initiation. The available energy reduces slowly andsmoothly later. This is because, at the beginning of theapplication, nodes in the sensor network are dense: thesensing area covered by neighboring nodes may be similarand overlapped. In this scenario, thus, the total energy dis-sipates at the beginning more rapidly than at the end of thenetwork’s lifetime when some nodes have died or the den-sity of the network has decreased. As mentioned in manypapers [4,5], an efficient approach to prolong the lifetimeof a dense sensor network while solving the sensing cover-age problem is to determine a localized and distributedprotocol for selecting a sufficient subset of active sensornodes as working nodes (on-duty), designating other nodesas off-duty. Furthermore, the network must be able to con-figure itself to any feasible degree of coverage and connec-tivity in order to support different applications andenvironments in accordance with the quality-of-service(QoS) requirement. If we can identify and schedule a sub-set of active sensor nodes according to local informationwhile satisfying the global coverage requirement and indi-cating which subset of the sensors can currently be active,we can significantly prolong the network lifetime.
Energy conservation is the major problem in sensor net-work communications. Flooding is a traditional robustalgorithm that delivers data packets from a source to a des-tination by broadcasting. However, the natural property offlooding causes broadcast storms that not only waste en-ergy due to their extreme redundant packet receptionscaused by retransmission [6], but also increase the numberof collisions, together depriving sensors of valuable batterypower. Therefore, the original flooding algorithm may notbe suitable in the context of dense networks like wirelesssensor networks. A straightforward solution to the broad-cast storm problem is to minimize redundant communica-tion. Several approaches in the literature have beenproposed to reduce retransmission.
Gossiping, an algorithm based on the repeated probabi-listic exchange of information between two members [7],addresses some critical problems of flooding overhead.The goal of gossip is to reduce the number of retransmis-sions by making some of the nodes discard the message in-stead of forwarding it. In the gossiping scheme, nodes inthe network are required to forward packets with a pre-specified probability p. When a node receives a message,rather than immediately retransmitting it as in flooding,
it relies on the probability p to determine whether or notto retransmit. The probability p that a node forwards amessage is called the gossip probability pgossip. The mainbenefit is that when pgossip is correctly chosen, the entirenetwork receives the broadcast message with very highprobability, even though only a non-deterministic subsetof nodes has forwarded the message [8]. Probabilisticchoice is a key element of gossiping, and in general refersto the choice of member nodes that communicate [7].However, choosing the correct value of pgossip or whichattributes to use for gossiping is a very difficult problem.
Several modified gossip-based approaches that aremost relevant to our method minimize redundant commu-nication by identifying a suitable subset of nodes andassigning them the responsibility of forwarding messages[8–12]. These approaches use meta-data negotiation [9],sleep schedules [10], geometry (directional) information[11], or local connectivity [12] as a parameter to gossip.The objective is to increase the overall network lifetimeby allowing redundant nodes in the network to sleep fora given period of time. The distinction between our meth-od and these approaches mentioned above is the criterionapplied to gossip and behavior of nodes after getting thegossip results.
In WSNs, as mentioned above, the sensing coverageproblem is directly related to node redundancy. However,to the best of our knowledge, no work has been done witha gossiping mechanism that is aware of sensing coverage.In our paper, we use sensing coverage information as aprobabilistic choice or a criterion for gossiping among sen-sor nodes. The result of gossip is to determine the behaviorof nodes: forwarding nodes serve as active nodes, and dis-regarding nodes serve as sleep nodes. Using the sensingcoverage criterion for gossiping can overcome the problemof initial gossiping of a source node that has very fewneighbors, where there is a fair chance that none of themwill gossip and that the gossip will never spread [13].
Our contributions in this paper are as follows: First, wedefine the maximum sensing coverage region (MSCR)problem and propose a novel gossip-based sensing-cover-age-aware algorithm to solve it. In our algorithm, sensornodes gossip their sensing coverage region with theirneighbor nodes to decide in a localized manner to forwardpackets (as an active node) or to disregard packets (as asleep/redundant node). Being sensing-coverage-aware,the redundant node can cut back on its activities wheneverits sensing region is k-covered by enough neighbors. Weschedule nodes alternating between active and sleepmodes while guaranteeing the k-coverage requirementover the whole working area, where k is predeterminedand can be changed by users. Second, we apply this algo-rithm to improve the performance of the LEACH protocol,a well-known hierarchical routing protocol for WSNs. Byintegrating the MSCR algorithm with the LEACH routingprotocol, we propose a new architecture for routing inlarge distributed WSNs. This efficient architecture includeseligibility for removing redundant sensor nodes, permitsconfigurable QoS coverage parameters, and provides suffi-cient sensing coverage with balanced sensor energy andlow communication overhead, each being individuallyadapted to maximize the network lifetime in its own right.

V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287 2277
With the distributed and low-overhead traffic benefits ofgossip, we spread energy consumption over different sen-sor nodes, and achieve maximum sensing coverage withminimal energy consumption in the design and implemen-tation of routing protocols for WSNs to prolong the wholenetwork lifetime. Finally, we develop a computer simula-tion for performance evaluation and confirm that ourmethod can achieve better performance than the conven-tional methods to prolong network lifetime.
The remainder of the paper is organized as follows: Sec-tion 2 presents some previous work on the sensing cover-age problem and gossip-based approaches in WSNs.Section 3 presents definitions and the MSCR problem for-mulation. In Section 4, we present an algorithm to solvethe MSCR problem. We apply our algorithm to the LEACHprotocol in Section 5 (the improved version of the originalLEACH protocol, called MSCR-LEACH). We use simulationto evaluate our method and compare the MSCR-LEACHwith the original LEACH protocol in Section 6. The last sec-tion is the conclusion of the paper.
2. Related work
2.1. Sensing coverage in WSNs
Sensing coverage, reflecting the quality of monitoringprovided by a sensor network, has been the focus of in-tense study recently. There are two types of coverage prob-lems: area coverage [14,15], in which the main goal is tocover (monitor) a desired area; and point or target cover-age [4,5,16–18], in which the object is to cover a set ofinteresting points or targets. In this paper, we addressthe first problem.
For the sensor network application to succeed, the ac-tive nodes must maintain both sensing coverage and net-work connectivity [4,19] so that nodes can communicatefor data fusion and report to the base stations. A straight-forward solution is to use a communication range ðRcÞ thatis at least twice the sensing range ðRsÞ, so that area cover-age implies connectivity of active sensors [19]. Xinh et al.[4] studied the relationship between coverage and connec-tivity, and proposed a coverage configuration protocol(CCP). In a CCP, each sensor consults an eligible rule, findsall intersection points between the borders of its neigh-bors’ sensing radii, and considers its own eligibility fordeactivation if each of those intersection points is coveredwith the desired sensing degree. Xinh generalized this con-clusion [4]: when Rc ¼ 2Rs, a sensor network that achievesk-coverage is k-connected.
To increase network lifetime, most techniques have di-vided the sensor nodes into a number of sets, such thateach set completely covers all the targets. These sensorsets are activated successively, such that at any instantonly one set is active. The sensors from the active set arein the active state (e.g., transmit, receive or idle) and allother sensors are in the sleep state. Cardei et al. [16] pro-posed an efficient scheme to address the target coverageproblem, with the objective of maximizing the networklifetime of a power constrained wireless sensor networkdeployed for monitoring (coverage) of a set of targets with
known locations in a randomly and densely deployed sen-sor network. They model the target coverage problem as amaximal set-cover problem, and propose and evaluate twoheuristics for it. The DAPR protocol [17] is based on anapplication cost that considers coverage and available en-ergy. It lets sensors be active according to the network cov-erage quality demand and to sleep whenever possibleduring the rest of the time. Tsai proposed coverage-pre-serving routing protocols [20], which are modified fromthe LEACH protocol and virtual grid routing protocols inwhich different nodes should be assigned different proba-bilities of being a cluster head. This probability depends onthe normalized effective sensing area of a node, which isdefined as the ratio of the effective sensing area to themaximum sensing area of a node. Tian and Georganas[15] proposed a distributed selection algorithm for cover-age preservation in sensor networks, in which a sensormeasures its neighborhood redundancy as the union ofthe sectors or central angles covered by neighboring sen-sors within the sensor’s sensing range.
Various different scheduling schemes have been pro-posed in the literature [5,18]. In these papers, the authorsconsider the arc or angle created by the overlapped sensingarea of two neighboring nodes as a critical parameter intheir algorithms. Distributed as well as centralized algo-rithms can allow the selection of the set of sensors thatare on the boundary of the coverage holes in the region[5]. They consider hole boundary detection as a crucialproblem for optimizing sensor placement and identifyingregions of interest for end users. However, the authors ofthe above papers do not consider the worst case of thealgorithms. Zhang and Hou address the issue of densitycontrol: an area is completely covered if there are at leasttwo disks that intersect and all crossings are covered[21]. Based on this idea, the authors proposed a distributedalgorithm called optimal geographical density control(OGDC). In OGDC, a node can be in one of three states:UNDECIDED, ON, or OFF. The algorithm repeatedly runsusing the back-off mechanism to determine the status ofeach node.
2.2. A gossip-based approach to WSNs
Several modified gossip-based approaches that aremost relevant to our method minimize redundant commu-nications by identifying a suitable subset of nodes andassigning them the responsibility of forwarding messages[9–11,13].
Heinzelman et al. [9] applied gossiping and negotiationto for data dissemination in WSNs. They proposed the SPINprotocol, in which nodes avoid transmitting redundantdata throughout the network, using meta-data negotiationand resource adaptation.
Hou et al. [10] present an energy conservation schemefor wireless ad hoc and sensor networks using a gossip-based sleep protocol (GSP) to put nodes into an energy-saving sleep state. The GSP is based on the observation thatin a well-connected network, there are usually many pathsbetween a source and a destination, so a percentage ofnodes can be in an energy conserving sleep mode withoutlosing network connectivity. With GSP, each node

2278 V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287
randomly goes to sleep with gossip sleep probability p. Thenetwork connectivity is determined by the probability p.The authors claim that certain values of p will make almostall the waking nodes in the network connected, affectingthe performance of the network only slightly.
Li et al. [11] propose a regional gossip approach, whichuses the geometry information of the source node and thedestination node as a criterion for gossiping. Only thenodes within some regions forward a message with someprobabilities.
Haas et al. [13] present a simple gossip-based routingprotocol for ad hoc networks by choosing some sets ofnodes to gossip with a probability p. A source sends theroute request with the probability p. When a node first re-ceives a route request, with the probability p it broadcaststhe request to its neighbors, and with the probability1 � p it discards the request; if the node receives the sameroute request again, it is discarded. This simple protocol iscalled GOSSIP1(p). The authors claim that, given a suffi-ciently large network and a gossip probability p greaterthan a certain threshold, almost all the nodes in the net-work can receive the message [13]. They did simulationsto investigate the gossiping probability and concludedthat a gossiping probability between 0.65 and 0.85 is suf-ficient to ensure that almost every node gets the messagein almost every routing. In a random ad hoc network, anode may have very few neighbors. In this case, GOS-SIP1(p) has a slight problem with initial gossip. There isa fair chance that none of the nodes will gossip and thatthe gossip will die.
In the paper, we propose a novel gossip-based sensing-coverage-aware algorithm that overcomes this problem byusing sensing coverage, which directly relates to the num-ber of neighbors, as a criterion for gossiping. The purposeof gossip is to determine the behavior of nodes: forwardingnodes will serve as active nodes; disregarding nodes play arole as sleep nodes.
3. Definitions and MSCR problem formulation
One fundamental problem in current WSNs is efficientdeployment of the required coverage. Specifically, given amonitoring region, how can we guarantee that every pointin the region is covered by the required number of sen-sors? In other words, we need to recognize which areasare covered by enough sensors. This problem is challengingdue to the limitations of wireless sensors, as well as the ad-hoc deployment properties of wireless sensor networks. Inthis section, we define sensing coverage and formulate themaximum sensing coverage region problem.
Consider a WSN consisting of n homogeneous sensornodes s1; s2; . . . ; sn, in a two-dimensional network area.Each sensor node si; i ¼ 1 � � �n is located on coordinateðxi; yiÞ inside the network area, where they have the samesensing range Rs and communication range Rc . We assumethat sensor nodes are static and that each sensor nodeknows its own location, all its neighbors, and the base sta-tion location. The positions of neighbors can be obtainedby exchanging ‘‘Hello” messages. Sensor nodes have syn-chronous timers and know their own residual energylevel.
Definition 1. The neighbor set of a sensor node si, denotedby NðsiÞ, is defined as the set of nodes within thecommunication range of the node si:
NðsiÞ ¼ fsj dðsi; sjÞ�� 6 Rc; j – ig: ð1Þ
The overlapped neighbor set of a sensor node si,denoted by OðsiÞ, is defined as the set of nodes within thesensing range of the node si:
OðsiÞ ¼ fsj dðsi; sjÞ�� 6 2Rs; j – ig; ð2Þ
where dðsi; sjÞ is the Euclidean distance between two sen-sors si and sj.
Definition 2. The sensing region of a sensor si located atðxi; yiÞ, denoted by Si
region, is a set of all points within si’ssensing range. A point p is said to be k-covered if it iswithin at least k sensors’ sensing regions.
For a sensor node si located at given point i, we use a cir-cle ði;RsÞ that is centered at the point i and has a radius Rs
to represent the sensing region of the sensor node si.Assuming that a sensor node can cover any point insideits sensing region, we define a point p to be covered (mon-itored) by a sensor node si if it is located in the sensing re-gion of the sensor node si or if the Euclidean distance fromp to the sensor node si is less than the sensing range of thesensor node si.
Given a set of sensor nodes deployed in a monitoringarea, we want to determine whether the area is sufficientlyk-covered. The parameter k is called the ‘‘coverage level” or‘‘coverage degree”, meaning that each point in the interest-ing area is within the sensing range of at least k active sen-sors. Different applications require different coveragelevels. For example, the applications require k ¼ 1 if sen-sors are deployed in a building to monitor temperature,sound or moisture, where the environment is friendlyand fault tolerance may not be important. Meanwhile,k > 1 may be required in situations where a stronger mon-itoring environment is necessary: for example, when sen-sor nodes operate in hostile regions such as battlefieldsor chemically polluted areas. In applications such as trian-gulation-based positioning and target tracking, multiplesensors are required to detect a moving target at any mo-ment; thus, the coverage level is required to be at leastk ¼ 3 for fault-tolerance purposes. With k-coverage, thenetwork still operates properly even when any k� 1 sen-sors fail at the same time [22].
For successful operation of the sensor network, the ac-tive nodes must maintain both sensing coverage and net-work connectivity, since network connectivity isnecessary for any routing algorithm to find a routing path.We further assume that the communication range of a sen-sor Rc is at least twice its sensing range Rs; ðRc ¼ 2RsÞ. Inthis model, any two sensor nodes si and sj, can directlycommunicate with each other if dðsi; sjÞ 6 Rc . Here, dðsi; sjÞis the Euclidean distance between si and sj. Thus, the k-cov-erage can guarantee k-connectivity [14,19].
Definition 3. Boundary arc: The arc created by two over-lapped sensor nodes si and sj is the arc created by twointersection points between two sensing region boundaries.

V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287 2279
By Definition 1, the sensing region of a node is de-scribed by an area enclosed by a circle (disk). Considertwo sensors si at ðxi; yiÞ and sj at ðxj; yjÞ, the intersection(overlapped area) of two sensing regions Si
region and Sjregion
produces a lens-shaped area (the area A marked inFig. 1). Without loss of generality, let sj reside to the westof si (i.e., yi ¼ yj and xi > xj) as illustrated in Fig. 1.
Regarding dðsi; sjÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxi � xjÞ2 þ ðyi � yjÞ
2q
as the dis-tance between si and sj, if dðsi; sjÞ < 2Rs, the overlappedarea A is the intersection of two sensing regions:
A ¼ Siregion
\Sj
region ð3Þ
or it can be obtained by the geometric calculation below:
A ¼ 4� A1
¼ 4� a2p� pR2
s �12� dðsi; sjÞ
2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiR2
s �dðsi; sjÞ
2
� �2s24 35
¼ 2R2s � a� dðsi; sjÞ
2Rs
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� dðsi; sjÞ
2Rs
� �2s24 35 ð4Þ
with the angle a ¼ arccosðdðsi ;sjÞ2RsÞ. Clearly, based on the Def-
inition 1, every point p located in area A can be covered byboth sensor nodes si and sj. The boundary arc arcj createdby two overlapped sensor nodes si and sj can be regardedas the start and end angles of the node si that is coveredby its neighbor sj determined by node si’s central angle2a. In other words, the boundary arc created by two over-lapped sensor nodes si and sj is the arc starting from theintersection point I1 to I2 going counterclockwise dI1mI2 .To use the boundary arc in the following algorithm, wetransform it to the angle ½p� a;pþ a�, as illustrated inFig. 1.
Definition 4 (Maximum sensing coverage region(MSCR)). Given a set of m sensors S ¼ s1; s2; . . . ; sm
deployed in a desired area and a natural number k, theMSCR problem is the problem of finding a subset S0# S that(1) S0 guarantees that the whole area is k-covered and (2)achieves a maximum sensing region.
Fig. 1. The boundary arc created by two overlapped sensor nodes and itstransformation to the angle of ½0;2p�.
In many wireless sensor applications, nodes are den-sely deployed at random over the entire desired area.Therefore, a particular region may have higher node den-sity than it needs, and thus the sensing regions of differ-ent nodes may overlap partially, or an event or target inthis location may be observed by multiple nodes. Weaim to avoid this problem by dividing the sensor nodesinto a number of subsets such that each subset com-pletely meets the coverage requirements in the desiredarea, to make sure that all important events happeningin that area can be accurately and timely detected. Atany instant, only one subset is active to do sensing tasks.Other sensor nodes are in sleep mode to conserve theirenergy. The sensor nodes alternate between active andsleep modes. This increases the network and applicationlifetimes compared to the case where all sensor nodesare active continuously. We define the MSCR problemand address this problem in the following method: select-ing a small number of delegated sensor nodes by identify-ing redundant nodes in high-density networks andassigning them to an off-duty operation mode while guar-anteeing that the whole area is covered by at least k ac-tive sensor nodes. This method maintains themonitoring capability and quality of a sensor network tomake sure that all important events occurring in that areacan be accurately and timely detected by the delegatedsensor nodes (achieves maximum sensing region).
4. Maximum sensing coverage region algorithm
Identifying redundant nodes in high-density networksand then assigning them an off-duty operation mode thathas lower energy consumption than the normal on-dutymode without losing coverage is an efficient way to pro-long the system lifetime. Furthermore, to maintain thequality of sensing, some applications require k-coverageof the monitored area. This means that a sensor shouldnot be allowed to sleep unless its sensing area is consid-ered sufficiently covered by its active neighbors. Therefore,the key point of a sensing coverage algorithm is to com-pute a sensor’s redundancy property. Specifically, we aimto determine whether the sensing region of a sensor underconsideration is sufficiently covered. By exchanging thelocation information with all of its one-hop neighbors, acorrect decision can be made in a distributed and localizedway. To be distributed and localized are important proper-ties of a node decision mechanism, as they are adaptive toa scalable and dynamic network topology.
Definition 5 (Redundant sensor node). A sensor node si is aredundant node if its entire sensing region is covered bythe sensing region of at least k active neighbor sensornodes.
We design a mechanism that allows redundant nodes todecide whether and when they should enter sleep mode.To design such a mechanism, we must answer the follow-ing questions: (i) Which rule should each node follow todetermine whether it is a redundant node? (ii) Whenshould redundant nodes decide to enter sleep mode? (iii)How long should a redundant node remain in sleep mode?

2280 V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287
Clearly, a sensor node is redundant if its sensing regionis k-covered by its neighbors. Here we propose a redun-dancy rule, by which a sensor node can decide whetherits sensing region is k-covered by its neighbors by checkingtwo necessary and sufficient conditions.
Theorem 1 (Redundancy rule). Considering a sensor node si
and a set of its overlapped neighbors OðsiÞ, given a naturalnumber k, the sensor node si is a redundant node if twoguarantee conditions are fulfilled.
Condition 1 (Necessary condition).The union of boundary arcs created by the set of the
overlapped neighbor nodes OðsiÞ covers completely k timesthe entire boundary sensing region of node si:[
j
arcj P 2kp 8j ¼ 1 � � � jOðsiÞj: ð5Þ
Condition 2 (Sufficient condition). The Euclidean distancefrom the node si to each node in the set OðsiÞ is less thanor equal to the sensing range Rs:
dðsi; sjÞ 6 Rs 8sj 2 OðsiÞ: ð6Þ
Proof of Theorem 1. Given sensor node si and a set of mneighbors in OðsiÞ, we first calculate the union of boundaryarcs formed by the set of its neighborsfarc1; arc2; arc3; . . . ; arcmg and then transform them to theangle in the range of ½0;2p� respectively.
The necessary conditionSm
j¼1arcj P 2kp means that theunion fits k times in the angle ½0;2p� or it covers k times360 degrees of the central angle. Clearly in this case, theborder of si’s sensing region is fully covered by the mneighbors. The total overlapped area A in Si
region can becalculated as:
A ¼[mj¼1
Aj ¼ A1 [ A2 [ A3 � � � [ Am ð7Þ
with each Aj can be calculated base on the Eq. (3) asfollows:
Aj ¼ 2R2s � arcj �
dðsi; sjÞ2Rs
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� dðsi; sjÞ
2Rs
� �2s24 35: ð8Þ
If dðsi; sjÞ 6 Rs then 2p3 6 arcj < p with j ¼ 1 � � �m, we can re-
write the Eq. (8) given:
2R2s �
p3�
ffiffiffi3p
4
" #6 Aj < 2pR2
s : ð9Þ
Substituting Aj in Eq. (9) for Eq. (7), the satisfied necessarycondition gives:
A ¼[mj¼1
Aj ¼ A1 [ A2 [ A3 � � � [ Am ¼ k2pR2s ð10Þ
or
A ¼ k� Siregion: ð11Þ
Now we can conclude that if the necessary condition is sat-isfied and the distances from node si to its neighbors OðsiÞ
are less than or equal to the sensing range Rs, then the un-ion of the overlapped region A is k times the entire sensingregion Si
region of node si. In other words, every point in thesensing region of node si is completely covered by k neigh-bors. As stated in the Definition 5, sensor node si is redun-dant with the k-coverage requirement. h
Fig. 2 illustrates an example where sensor node si cov-ered by three neighbor nodes s1; s2; s3. The distance be-tween si and s1; s2; s3 is less than the sensing range Rs.The overlapped area A ¼ A1 [ A2 [ A3 ¼ Si
region means everypoint in the sensing region of node si is covered by at leastone sensor node. We can determine node si as a redundantnode with k ¼ 1. In Fig. 3, the set of overlapped neighborscompletely covers the whole border of sensor node si, butwith dðsi; sjÞ > Rs, the region near the center of si cannotbe covered by any neighbor. The sensor node si in this caseis not redundant. The percentage of overlapped sensing re-gions mainly depends on the distance between the nodeand each of its neighbors. Longer distances to the neigh-bors make overlapping areas smaller and representativeof a lower percentage of covered area. That is why we needthe sufficient condition: so that we can guarantee all thesensing area of node si covered by its neighbors in everycase.
Based on the previous definitions and Theorem 1, wepresent a novel gossip-based sensing-coverage-awarealgorithm to solve the MSCR problem, where the sensingcoverage information is used as a probabilistic choice forgossiping among nodes. A standard approach to dissemina-tion, a traditional gossip-based application, is to simply letpeers (sensor nodes) forward messages to each other [7]with a pre-specified gossip probability p. The gossip prob-ability p is a criterion to determine whether or not to for-ward messages.
In the modified gossip-based algorithm, we present an-other viewpoint on gossip. Here, the scope of gossip is onlywithin a set of one-hop neighbor nodes. The criterion forgossiping is the arc transformation that is calculated fromthe sensing coverage region. The purpose of gossip is todetermine the behavior of nodes: forwarding nodes willserve as active nodes; disregarding nodes play a role assleep nodes. We apply gossiping in the distributed systemframework introduced in [7] to model our method.
Algorithm 1. Maximum sensing coverage region
1. for each sensor node si do2. Find OðsiÞ by Eq. (2)3. Send gossip msg: to OðsiÞ4. Wait tgossip to receive the reply of gossip msg.5. Calculate the boundary arcs between si and OðsiÞ6. Transform the arcs into the angle ½0; 2p�7. if si j Eq. (5) and si j Eq. (6) then8. si redundant node9. Send sleep msg. // sensor si is disregarding node10. else11. Send active_msg. // sensor si is forwarding node12. end if13. end for
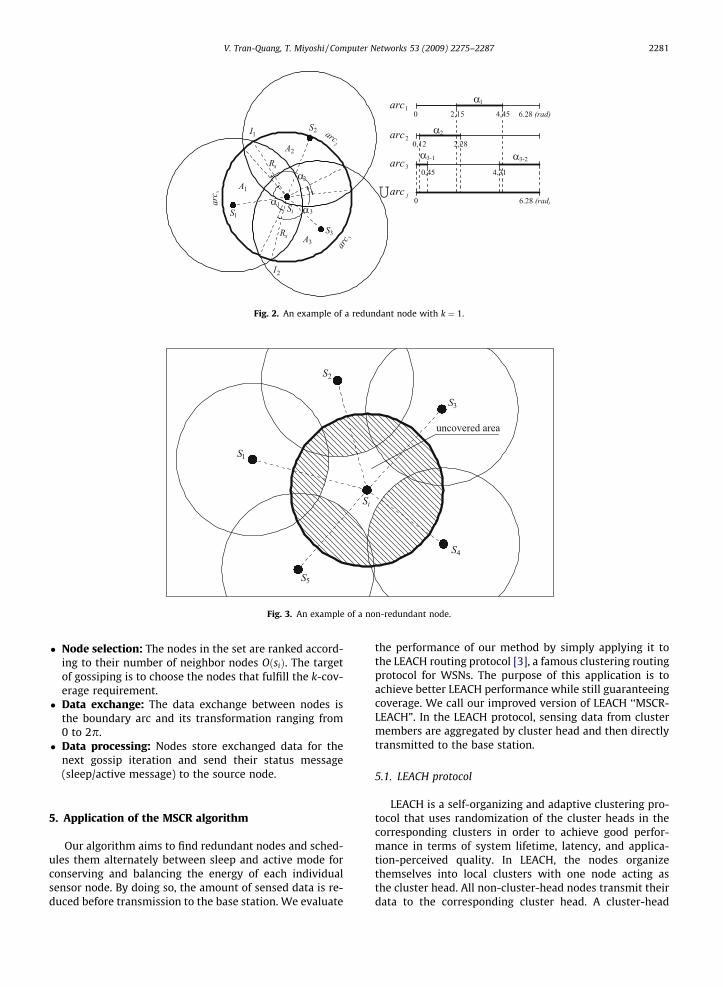
Fig. 2. An example of a redundant node with k ¼ 1.
of a non-redundant node.
V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287 2281
� Node selection: The nodes in the set are ranked accord-ing to their number of neighbor nodes Oðs Þ. The target
Fig. 3. An example
i
of gossiping is to choose the nodes that fulfill the k-cov-erage requirement.
� Data exchange: The data exchange between nodes isthe boundary arc and its transformation ranging from0 to 2p.
� Data processing: Nodes store exchanged data for thenext gossip iteration and send their status message(sleep/active message) to the source node.
5. Application of the MSCR algorithm
Our algorithm aims to find redundant nodes and sched-ules them alternately between sleep and active mode forconserving and balancing the energy of each individualsensor node. By doing so, the amount of sensed data is re-duced before transmission to the base station. We evaluate
the performance of our method by simply applying it tothe LEACH routing protocol [3], a famous clustering routingprotocol for WSNs. The purpose of this application is toachieve better LEACH performance while still guaranteeingcoverage. We call our improved version of LEACH ‘‘MSCR-LEACH”. In the LEACH protocol, sensing data from clustermembers are aggregated by cluster head and then directlytransmitted to the base station.
5.1. LEACH protocol
LEACH is a self-organizing and adaptive clustering pro-tocol that uses randomization of the cluster heads in thecorresponding clusters in order to achieve good perfor-mance in terms of system lifetime, latency, and applica-tion-perceived quality. In LEACH, the nodes organizethemselves into local clusters with one node acting asthe cluster head. All non-cluster-head nodes transmit theirdata to the corresponding cluster head. A cluster-head
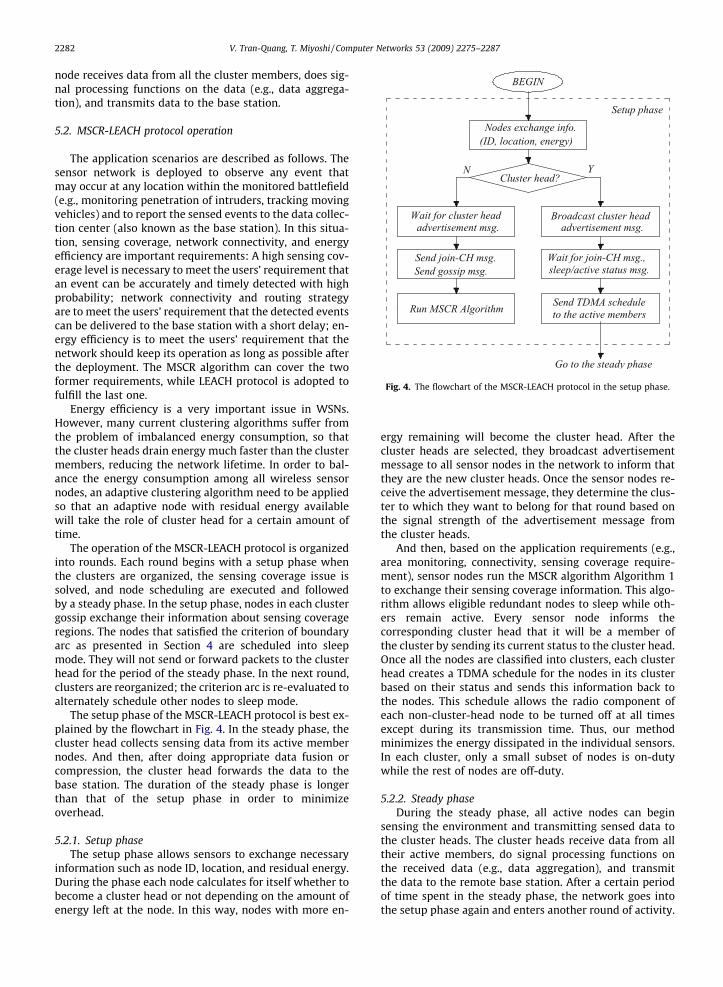
Fig. 4. The flowchart of the MSCR-LEACH protocol in the setup phase.
2282 V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287
node receives data from all the cluster members, does sig-nal processing functions on the data (e.g., data aggrega-tion), and transmits data to the base station.
5.2. MSCR-LEACH protocol operation
The application scenarios are described as follows. Thesensor network is deployed to observe any event thatmay occur at any location within the monitored battlefield(e.g., monitoring penetration of intruders, tracking movingvehicles) and to report the sensed events to the data collec-tion center (also known as the base station). In this situa-tion, sensing coverage, network connectivity, and energyefficiency are important requirements: A high sensing cov-erage level is necessary to meet the users’ requirement thatan event can be accurately and timely detected with highprobability; network connectivity and routing strategyare to meet the users’ requirement that the detected eventscan be delivered to the base station with a short delay; en-ergy efficiency is to meet the users’ requirement that thenetwork should keep its operation as long as possible afterthe deployment. The MSCR algorithm can cover the twoformer requirements, while LEACH protocol is adopted tofulfill the last one.
Energy efficiency is a very important issue in WSNs.However, many current clustering algorithms suffer fromthe problem of imbalanced energy consumption, so thatthe cluster heads drain energy much faster than the clustermembers, reducing the network lifetime. In order to bal-ance the energy consumption among all wireless sensornodes, an adaptive clustering algorithm need to be appliedso that an adaptive node with residual energy availablewill take the role of cluster head for a certain amount oftime.
The operation of the MSCR-LEACH protocol is organizedinto rounds. Each round begins with a setup phase whenthe clusters are organized, the sensing coverage issue issolved, and node scheduling are executed and followedby a steady phase. In the setup phase, nodes in each clustergossip exchange their information about sensing coverageregions. The nodes that satisfied the criterion of boundaryarc as presented in Section 4 are scheduled into sleepmode. They will not send or forward packets to the clusterhead for the period of the steady phase. In the next round,clusters are reorganized; the criterion arc is re-evaluated toalternately schedule other nodes to sleep mode.
The setup phase of the MSCR-LEACH protocol is best ex-plained by the flowchart in Fig. 4. In the steady phase, thecluster head collects sensing data from its active membernodes. And then, after doing appropriate data fusion orcompression, the cluster head forwards the data to thebase station. The duration of the steady phase is longerthan that of the setup phase in order to minimizeoverhead.
5.2.1. Setup phaseThe setup phase allows sensors to exchange necessary
information such as node ID, location, and residual energy.During the phase each node calculates for itself whether tobecome a cluster head or not depending on the amount ofenergy left at the node. In this way, nodes with more en-
ergy remaining will become the cluster head. After thecluster heads are selected, they broadcast advertisementmessage to all sensor nodes in the network to inform thatthey are the new cluster heads. Once the sensor nodes re-ceive the advertisement message, they determine the clus-ter to which they want to belong for that round based onthe signal strength of the advertisement message fromthe cluster heads.
And then, based on the application requirements (e.g.,area monitoring, connectivity, sensing coverage require-ment), sensor nodes run the MSCR algorithm Algorithm 1to exchange their sensing coverage information. This algo-rithm allows eligible redundant nodes to sleep while oth-ers remain active. Every sensor node informs thecorresponding cluster head that it will be a member ofthe cluster by sending its current status to the cluster head.Once all the nodes are classified into clusters, each clusterhead creates a TDMA schedule for the nodes in its clusterbased on their status and sends this information back tothe nodes. This schedule allows the radio component ofeach non-cluster-head node to be turned off at all timesexcept during its transmission time. Thus, our methodminimizes the energy dissipated in the individual sensors.In each cluster, only a small subset of nodes is on-dutywhile the rest of nodes are off-duty.
5.2.2. Steady phaseDuring the steady phase, all active nodes can begin
sensing the environment and transmitting sensed data tothe cluster heads. The cluster heads receive data from alltheir active members, do signal processing functions onthe received data (e.g., data aggregation), and transmitthe data to the remote base station. After a certain periodof time spent in the steady phase, the network goes intothe setup phase again and enters another round of activity.
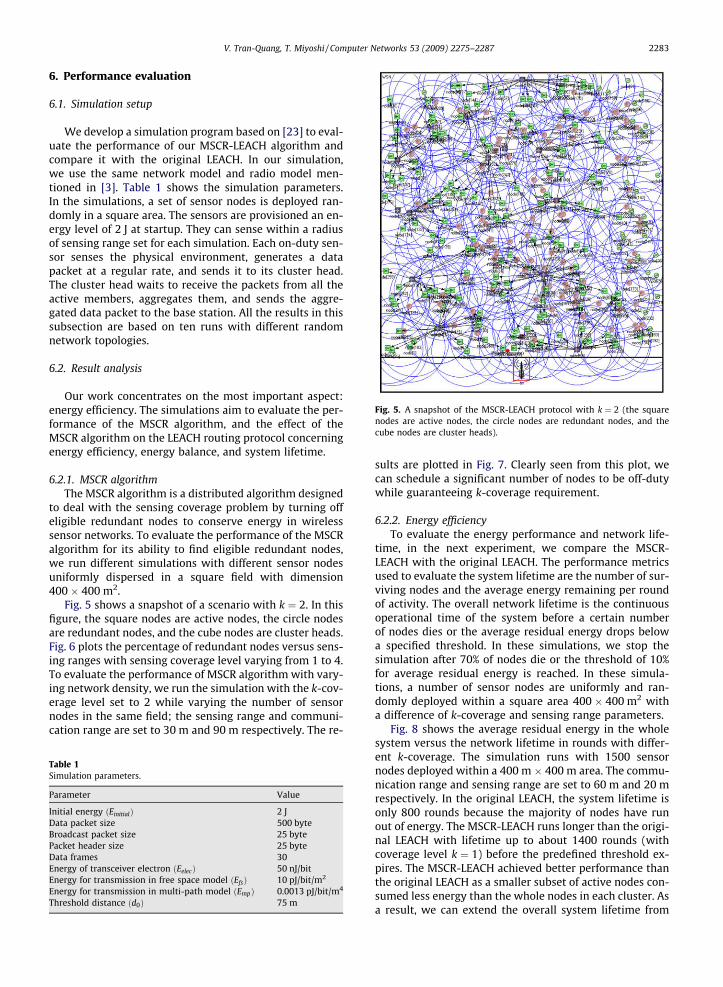
Fig. 5. A snapshot of the MSCR-LEACH protocol with k ¼ 2 (the squarenodes are active nodes, the circle nodes are redundant nodes, and thecube nodes are cluster heads).
V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287 2283
6. Performance evaluation
6.1. Simulation setup
We develop a simulation program based on [23] to eval-uate the performance of our MSCR-LEACH algorithm andcompare it with the original LEACH. In our simulation,we use the same network model and radio model men-tioned in [3]. Table 1 shows the simulation parameters.In the simulations, a set of sensor nodes is deployed ran-domly in a square area. The sensors are provisioned an en-ergy level of 2 J at startup. They can sense within a radiusof sensing range set for each simulation. Each on-duty sen-sor senses the physical environment, generates a datapacket at a regular rate, and sends it to its cluster head.The cluster head waits to receive the packets from all theactive members, aggregates them, and sends the aggre-gated data packet to the base station. All the results in thissubsection are based on ten runs with different randomnetwork topologies.
6.2. Result analysis
Our work concentrates on the most important aspect:energy efficiency. The simulations aim to evaluate the per-formance of the MSCR algorithm, and the effect of theMSCR algorithm on the LEACH routing protocol concerningenergy efficiency, energy balance, and system lifetime.
6.2.1. MSCR algorithmThe MSCR algorithm is a distributed algorithm designed
to deal with the sensing coverage problem by turning offeligible redundant nodes to conserve energy in wirelesssensor networks. To evaluate the performance of the MSCRalgorithm for its ability to find eligible redundant nodes,we run different simulations with different sensor nodesuniformly dispersed in a square field with dimension400 � 400 m2.
Fig. 5 shows a snapshot of a scenario with k ¼ 2. In thisfigure, the square nodes are active nodes, the circle nodesare redundant nodes, and the cube nodes are cluster heads.Fig. 6 plots the percentage of redundant nodes versus sens-ing ranges with sensing coverage level varying from 1 to 4.To evaluate the performance of MSCR algorithm with vary-ing network density, we run the simulation with the k-cov-erage level set to 2 while varying the number of sensornodes in the same field; the sensing range and communi-cation range are set to 30 m and 90 m respectively. The re-
Table 1Simulation parameters.
Parameter Value
Initial energy ðEinitialÞ 2 JData packet size 500 byteBroadcast packet size 25 bytePacket header size 25 byteData frames 30Energy of transceiver electron ðEelecÞ 50 nJ/bitEnergy for transmission in free space model ðEfsÞ 10 pJ/bit/m2
Energy for transmission in multi-path model ðEmpÞ 0.0013 pJ/bit/m4
Threshold distance ðd0Þ 75 m
sults are plotted in Fig. 7. Clearly seen from this plot, wecan schedule a significant number of nodes to be off-dutywhile guaranteeing k-coverage requirement.
6.2.2. Energy efficiencyTo evaluate the energy performance and network life-
time, in the next experiment, we compare the MSCR-LEACH with the original LEACH. The performance metricsused to evaluate the system lifetime are the number of sur-viving nodes and the average energy remaining per roundof activity. The overall network lifetime is the continuousoperational time of the system before a certain numberof nodes dies or the average residual energy drops belowa specified threshold. In these simulations, we stop thesimulation after 70% of nodes die or the threshold of 10%for average residual energy is reached. In these simula-tions, a number of sensor nodes are uniformly and ran-domly deployed within a square area 400 � 400 m2 witha difference of k-coverage and sensing range parameters.
Fig. 8 shows the average residual energy in the wholesystem versus the network lifetime in rounds with differ-ent k-coverage. The simulation runs with 1500 sensornodes deployed within a 400 m � 400 m area. The commu-nication range and sensing range are set to 60 m and 20 mrespectively. In the original LEACH, the system lifetime isonly 800 rounds because the majority of nodes have runout of energy. The MSCR-LEACH runs longer than the origi-nal LEACH with lifetime up to about 1400 rounds (withcoverage level k ¼ 1) before the predefined threshold ex-pires. The MSCR-LEACH achieved better performance thanthe original LEACH as a smaller subset of active nodes con-sumed less energy than the whole nodes in each cluster. Asa result, we can extend the overall system lifetime from
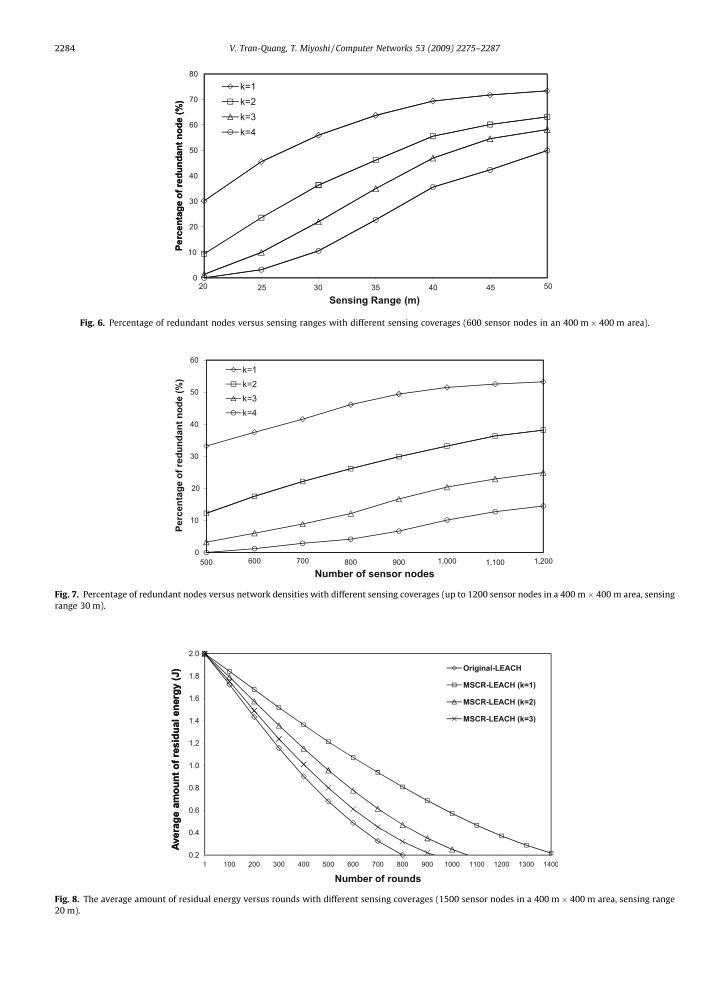
Fig. 6. Percentage of redundant nodes versus sensing ranges with different sensing coverages (600 sensor nodes in an 400 m� 400 m area).
Fig. 7. Percentage of redundant nodes versus network densities with different sensing coverages (up to 1200 sensor nodes in a 400 m� 400 m area, sensingrange 30 m).
Fig. 8. The average amount of residual energy versus rounds with different sensing coverages (1500 sensor nodes in a 400 m� 400 m area, sensing range20 m).
2284 V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287
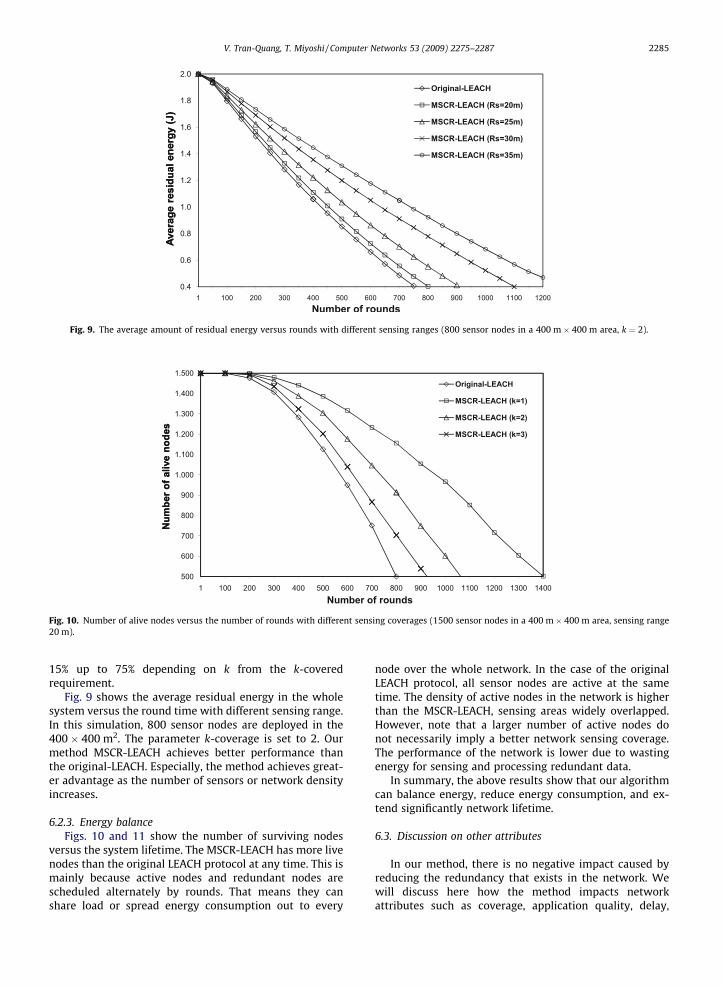
Fig. 9. The average amount of residual energy versus rounds with different sensing ranges (800 sensor nodes in a 400 m� 400 m area, k ¼ 2).
.
.
.
.
.
.
Fig. 10. Number of alive nodes versus the number of rounds with different sensing coverages (1500 sensor nodes in a 400 m� 400 m area, sensing range20 m).
V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287 2285
15% up to 75% depending on k from the k-coveredrequirement.
Fig. 9 shows the average residual energy in the wholesystem versus the round time with different sensing range.In this simulation, 800 sensor nodes are deployed in the400 � 400 m2. The parameter k-coverage is set to 2. Ourmethod MSCR-LEACH achieves better performance thanthe original-LEACH. Especially, the method achieves great-er advantage as the number of sensors or network densityincreases.
6.2.3. Energy balanceFigs. 10 and 11 show the number of surviving nodes
versus the system lifetime. The MSCR-LEACH has more livenodes than the original LEACH protocol at any time. This ismainly because active nodes and redundant nodes arescheduled alternately by rounds. That means they canshare load or spread energy consumption out to every
node over the whole network. In the case of the originalLEACH protocol, all sensor nodes are active at the sametime. The density of active nodes in the network is higherthan the MSCR-LEACH, sensing areas widely overlapped.However, note that a larger number of active nodes donot necessarily imply a better network sensing coverage.The performance of the network is lower due to wastingenergy for sensing and processing redundant data.
In summary, the above results show that our algorithmcan balance energy, reduce energy consumption, and ex-tend significantly network lifetime.
6.3. Discussion on other attributes
In our method, there is no negative impact caused byreducing the redundancy that exists in the network. Wewill discuss here how the method impacts networkattributes such as coverage, application quality, delay,
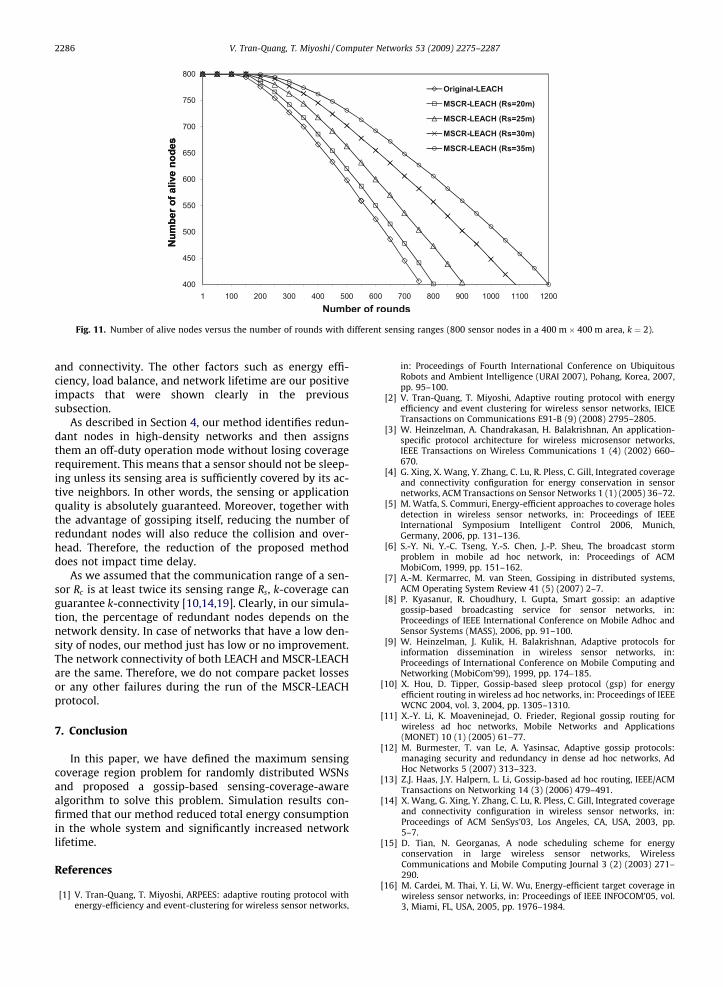
Fig. 11. Number of alive nodes versus the number of rounds with different sensing ranges (800 sensor nodes in a 400 m� 400 m area, k ¼ 2).
2286 V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287
and connectivity. The other factors such as energy effi-ciency, load balance, and network lifetime are our positiveimpacts that were shown clearly in the previoussubsection.
As described in Section 4, our method identifies redun-dant nodes in high-density networks and then assignsthem an off-duty operation mode without losing coveragerequirement. This means that a sensor should not be sleep-ing unless its sensing area is sufficiently covered by its ac-tive neighbors. In other words, the sensing or applicationquality is absolutely guaranteed. Moreover, together withthe advantage of gossiping itself, reducing the number ofredundant nodes will also reduce the collision and over-head. Therefore, the reduction of the proposed methoddoes not impact time delay.
As we assumed that the communication range of a sen-sor Rc is at least twice its sensing range Rs, k-coverage canguarantee k-connectivity [10,14,19]. Clearly, in our simula-tion, the percentage of redundant nodes depends on thenetwork density. In case of networks that have a low den-sity of nodes, our method just has low or no improvement.The network connectivity of both LEACH and MSCR-LEACHare the same. Therefore, we do not compare packet lossesor any other failures during the run of the MSCR-LEACHprotocol.
7. Conclusion
In this paper, we have defined the maximum sensingcoverage region problem for randomly distributed WSNsand proposed a gossip-based sensing-coverage-awarealgorithm to solve this problem. Simulation results con-firmed that our method reduced total energy consumptionin the whole system and significantly increased networklifetime.
References
[1] V. Tran-Quang, T. Miyoshi, ARPEES: adaptive routing protocol withenergy-efficiency and event-clustering for wireless sensor networks,
in: Proceedings of Fourth International Conference on UbiquitousRobots and Ambient Intelligence (URAI 2007), Pohang, Korea, 2007,pp. 95–100.
[2] V. Tran-Quang, T. Miyoshi, Adaptive routing protocol with energyefficiency and event clustering for wireless sensor networks, IEICETransactions on Communications E91-B (9) (2008) 2795–2805.
[3] W. Heinzelman, A. Chandrakasan, H. Balakrishnan, An application-specific protocol architecture for wireless microsensor networks,IEEE Transactions on Wireless Communications 1 (4) (2002) 660–670.
[4] G. Xing, X. Wang, Y. Zhang, C. Lu, R. Pless, C. Gill, Integrated coverageand connectivity configuration for energy conservation in sensornetworks, ACM Transactions on Sensor Networks 1 (1) (2005) 36–72.
[5] M. Watfa, S. Commuri, Energy-efficient approaches to coverage holesdetection in wireless sensor networks, in: Proceedings of IEEEInternational Symposium Intelligent Control 2006, Munich,Germany, 2006, pp. 131–136.
[6] S.-Y. Ni, Y.-C. Tseng, Y.-S. Chen, J.-P. Sheu, The broadcast stormproblem in mobile ad hoc network, in: Proceedings of ACMMobiCom, 1999, pp. 151–162.
[7] A.-M. Kermarrec, M. van Steen, Gossiping in distributed systems,ACM Operating System Review 41 (5) (2007) 2–7.
[8] P. Kyasanur, R. Choudhury, I. Gupta, Smart gossip: an adaptivegossip-based broadcasting service for sensor networks, in:Proceedings of IEEE International Conference on Mobile Adhoc andSensor Systems (MASS), 2006, pp. 91–100.
[9] W. Heinzelman, J. Kulik, H. Balakrishnan, Adaptive protocols forinformation dissemination in wireless sensor networks, in:Proceedings of International Conference on Mobile Computing andNetworking (MobiCom’99), 1999, pp. 174–185.
[10] X. Hou, D. Tipper, Gossip-based sleep protocol (gsp) for energyefficient routing in wireless ad hoc networks, in: Proceedings of IEEEWCNC 2004, vol. 3, 2004, pp. 1305–1310.
[11] X.-Y. Li, K. Moaveninejad, O. Frieder, Regional gossip routing forwireless ad hoc networks, Mobile Networks and Applications(MONET) 10 (1) (2005) 61–77.
[12] M. Burmester, T. van Le, A. Yasinsac, Adaptive gossip protocols:managing security and redundancy in dense ad hoc networks, AdHoc Networks 5 (2007) 313–323.
[13] Z.J. Haas, J.Y. Halpern, L. Li, Gossip-based ad hoc routing, IEEE/ACMTransactions on Networking 14 (3) (2006) 479–491.
[14] X. Wang, G. Xing, Y. Zhang, C. Lu, R. Pless, C. Gill, Integrated coverageand connectivity configuration in wireless sensor networks, in:Proceedings of ACM SenSys’03, Los Angeles, CA, USA, 2003, pp.5–7.
[15] D. Tian, N. Georganas, A node scheduling scheme for energyconservation in large wireless sensor networks, WirelessCommunications and Mobile Computing Journal 3 (2) (2003) 271–290.
[16] M. Cardei, M. Thai, Y. Li, W. Wu, Energy-efficient target coverage inwireless sensor networks, in: Proceedings of IEEE INFOCOM’05, vol.3, Miami, FL, USA, 2005, pp. 1976–1984.

V. Tran-Quang, T. Miyoshi / Computer Networks 53 (2009) 2275–2287 2287
[17] M. Perillo, W. Heinzelman, Dapr: A protocol for wireless sensornetworks utilizing an application-based routing cost, in: Proceedingsof IEEE Wireless Communications Networking Conference 2004(WCNC’04), vol. 3, Atlanta, Georgia, USA, 2004, pp. 1540–1545.
[18] C.-F. Huang, Y.-C. Tseng, The coverage problem in a wireless sensornetwork, in: Proceedings of Second ACM International Conferenceon Wireless Sensor Networks and Applications (WSNA’03), SanDiego, California, USA, 2003, pp. 115–121.
[19] F. Zhao et al., Collaborative signal and information processing: aninformation directed approach, in: Proceedings of IEEE, vol. 91, 2003,pp. 1199–1209.
[20] Y.-R. Tsai, Coverage-preserving routing protocols for randomlydistributed wireless sensor networks, IEEE Transactions onWireless Communications 6 (4) (2007) 1240–1245.
[21] H. Zhang, J. Hou, Maintaining sensing coverage and connectivity inlarge sensor networks, International Journal of Wireless Ad Hoc andSensor Networks 1 (2005) 89–124.
[22] C. Vu, S. Gao, W.P. Deshmukh, L. Yingshu, Distributed energy-efficient scheduling approach for k-coverage in wireless sensornetworks, in: Proceedings of IEEE MILCOM 2006, Washington, DC,USA, 2006, pp. 1–7.
[23] OMNeT++, A discrete event simulation system, in: Version 3.3, 2007,retrieved from official website: http://www.omnetpp.org/.
Vinh Tran-Quang received his B.E. (2000) andM.S. (2003) degrees in Electronics and Tele-communications from Hanoi University ofTechnology, Vietnam. Currently, he is doinghis research as a Ph.D. student at the GraduateSchool of Engineering, Shibaura Institute ofTechnology, Saitama, Japan. His currentinterests include ad hoc network and wirelesssensor network. He received the IEEE SectionPrize Student Award in 2008. He is a studentmember of IEEE, IEICE.
Takumi Miyoshi received his B.Eng., M.Eng.,and Ph.D. degrees in electronic engineeringfrom the University of Tokyo, Japan, in 1994,1996, and 1999, respectively. He was a visit-ing associate from 1994 to 1996 and anInternet technical staff from 1996 to 1997 atthe Institute for Monetary and EconomicStudies, Bank of Japan. He was also a researchassociate at Global Information and Telecom-munication Institute, Waseda University,from 1999 to 2001, and a research fellow atTelecommunications Advancement Organiza-
tion of Japan from 1998 to 2003. He is presently an associate professor at
Department of Electronic Information Systems, College of Systems Engi-neering and Science, Shibaura Institute of Technology, Saitama, Japan. Hisresearch interests include multimedia communication technologies,mobile ad hoc and sensor networks, and online learning systems. Hereceived the IEICE Young Investigators Award in 2004, the IEICE Infor-mation Network Research Award in 2001, 2004 and 2006, the IEICECommunications Society Distinguished Contributions Award in 2006 and2007, and the Ericsson Young Scientist Award in 2002. He is a member ofIEEE, IEICE.
Related Documents