A mean field approximation in data assimilation for non-linear dynamics Eyink, G. L. et al. • non-linear filtering/smoothing problems • Connections with other methods • Mean-field variational approach • Closure techniques • Toy example: a bistable double-well system 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A mean field approximation in data assimilation for non-linear
dynamics
Eyink, G. L. et al.
• non-linear filtering/smoothing problems
• Connections with other methods
• Mean-field variational approach
• Closure techniques
• Toy example: a bistable double-well system
1
Non-linear estimation problem
dX(t) = f(X, t)dt + (2D)1/2(X, t)dW(t),
Y(t) = Z(X(t), t) + R1/2(t)η(t),
• X(t): state vectors at ti ≤ t ≤ tf
• f(X, t): a drift/dynamical vector
• W(t): a vector Wiener process
• D: a diffusion matrix;
• η(t): a white noise;
• Y(t): an observation process → data Y(t′) = {Y(t) : t ≤ t′}
• R(t): a covariance function;
• Z(·): a measurement function
2

−→ optimal estimation of the conditional probability
• P(x, t|Y(t)) with t < tf for filtering problem
• P(x, t|Y(tf )) with t < tf for smoothing problem
Discrete-Time Data:
yi = Y(ti) with ti ≤ t1 < t2 < ... < tM−1 < tM ≤ tf .
optimal filtering → P(x, t|Y(tf )) is the solver of the forward
Kolmogorov equation ( Kushner and Stratonovich )
∂tP(x, t) = L(t)P(x, t) with P(x, t = ti) = P0(x)
where
L(t) = −∑
k
∂[f(x, t)(·)]∂xk
+∑
ij
∂2[Dij(x, t)(·)]∂xi∂xj
.
3

At measurement times tm, P (x, t) satisfies the forward jump
condition
P (x, t+) =exp[y>
mR−1
mZ(x, tm) − 1
2Z>(x, tm)R−1
mZ(x, tm)]
W (y1, ..., ym)P (x, t−)
optimal smoothing → P(x, t|R(tf )) = A(x, t)P (x, t) where A(x, t)
is the solver of the backward Kolmogorov equation ( Pardoux )
∂tA(x, t) + L∗(t)A(x, t) = 0 with A(x, tf ) = 1)
At measurement times tm, A(x, t) satisfies the backward jump
condition
A(x, t−) = A(x, t+)exp[y>
mR−1
mZ(x, tm) − 1
2Z>(x, tm)R−1
mZ(x, tm)]
W (y1, ..., ym)
−→ infinite-dimensional filter and smoother!
4

In the linear case, where
f(x, t) = A(t)x, D(x, t) = D(t) and Z(x, t) = B(t)x
−→ the finite dimensional Kalman-Bucy optimal linear filter.
From estimation theory to control theory: a variation formulation
of the linear estimation problem:
ΓX [x] =1
4
∫ tf
ti
dt[dx
dt−A(t)x]>D−1(t)[
dx
dt−A(t)x]
︸ ︷︷ ︸
the Onsager-Machlup action
ΓY [x] =1
2
∫ tf
ti
dt[Y(t) − B(t)x]>R−1(t)[Y(t) − B(t)x]
The minimizer of the combined cost function
ΓX,Y [x,y] = ΓX [x] + ΓY [x]
coincides with the Kalman-Bucy filter and smoother.
5

Can the Onsager-Machlup action be generalised for nonlinear cases?
−→ a mean-field variational approach
Consider noise-free observations Z(t),
• Definition of ΓZ [z]
−→ the Cramer theory ( the theory of large deviations )
limN→∞
P(ZN (t) = z(t) : ti < t < tf
)∼ lim
N→∞exp (−N · ΓZ [z])
where
ZN (t) =1
N
N∑
n=1
Zn(t).
−→ the minimizer of ΓZ [z] is sub-optimal!
6

• Calculation of ΓZ [z]
−→ the action functional ( Balian and Veneroni )
Γ[A,P] =
∫ tf
ti
dt
∫
dxA(x, t)(∂t − L(t)P(x, t)
−→ΓZ [z] = st.pt.A,PΓ[A,P]
subject to∫
dxA(x, t)P(x, t) = 1
and ∫
dxA(x, t)Z(t)P(x, t) = z(t).
7
−→ the Lagrange multiplier h(t)
h(t) =M∑
k=1
λkδ(t − tk)
−→ the Euler-Lagrange equations are the forward- and
backward Kolmogorov equations with the jump conditions
P(x, tk+) =exp(λ>
k Z(x, tk))
W(tk−)P(x, tk−)
and
A(x, tk−) =exp(λ>
k Z(x, tk))
W(tk−)A(x, tk+)
−→ a cumulant generating function
FZ(λ1, ..., λM ) =M∑
k=1
log < eλ>
k Z(tk) >=M∑
k=1
logW(tk−)
8
• multitime entropy HZ(z1, ..., zM )
−→ the Legendre transform of FZ
HZ(z1, ..., zM ) = maxλ1,...,λM
{M∑
k=1
z>k λk − FZ(λ1, ..., λM )
}
−→ the Contraction Principle ( Varadhan )
HZ(z1, ..., zM ) = minz:z(tk)=zk,k=1,...,MΓZ [z]
−→ Two useful relations in a descent algorithm
λm =∂HZ
∂xmand xm =
∂FZ
∂λm.
9

Closure Techniques: Basic Idea
• The Rayleigh-Ritz method which is based upon a variational
formulation of the moment-closure scheme;
• A set of moment functions, say Mi(x, t), i = 1, ..., R, and their
expectation functions µi(t) w.r.t. P(x, t);
• P(x, t) is parameterized by µ(t) = (µ1(t), ..., µR(t))>. Thus,
P(x, t; µ);
• Left-Linear Ansatz
A(x, t; α) = 1 +R∑
i=1
αi[Mi(x, t) − µi(t)]
︸ ︷︷ ︸
α>[M(x,t)−µ(t)]
10

• The resulting Euler-Lagrange equations
dµ
dt= V (µ, t)
︸ ︷︷ ︸
standard moment-closure
+ C>Z (µ, t) · h(t)
anddα
dt=
(∂VZ
∂µ
)>
α +
(∂ξ
∂µ
)>
h(t)
subject t0
µ(ti) = µ0 and α(tf ) = 0
where
V (µ, t) =< (∂t + L∗)M(t) >µ(t)
ξ(µ, t) =< Z(t) >µ
C>Z (µ, t) =< Z(t)M>(t) >µ(t) −ξ(µ, t)µ>
VZ(µ,h, t) =dµ
dt= V (µ, t) + C>
Z (µ, t) · h(t)
11
Closure Techniques: Practical Implementation
Ansatze
P(x, t) ∝ exp(β>M(x, t)) · P∗(x)
and
A(x, t) ∝ exp(α>M(x, t)),
where
• P∗(x) is a suitable reference PDF
• The quantity being measured is included among the moment
variables
.....
.....
12

.....
.....
The Euler-Lagrange equations
λ = W (λ, t) + 2S(λ, t)γ
and
γ +
(∂W
∂λ
)>
γ +∂
∂λ(γ>Sγ) = 0
with jump condition
γ+m = γ−
m + C(λ(tm), tm)R−1m [m(tm) − ym].
−→ a boundary-value problem
−→ Newton relaxation algorithm
13

Toy example : a stochastically forced double-well system
dx
dt= 4x(1 − x2) + κη(t) with κ = 0.5
−→ the steady-state probability distribution of the system
Ps(x) ∝ exp
(
−2U(x)
κ2
)
where U(x) = −2x2 + x4
14

moment-closure:
• the reference PDF
P∗(x) =1√
2πσ2
[
e−(x+1)2
2σ2 + e−(x−1)2
2σ2
]
· 1
2
where σ2 = κ16 ;
• first-order closure
P(x, t) ∝ eλ1x · P∗(x) and dµ1
dt = 4µ1 − 4µ3
• second-order closure
P(x, t) ∝ eλ1x+λ2x2 · P∗(x)
dµ1
dt = 4µ1 − 4µ3 and dµ2
dt = 8µ2 − 8µ4 + κ2
15
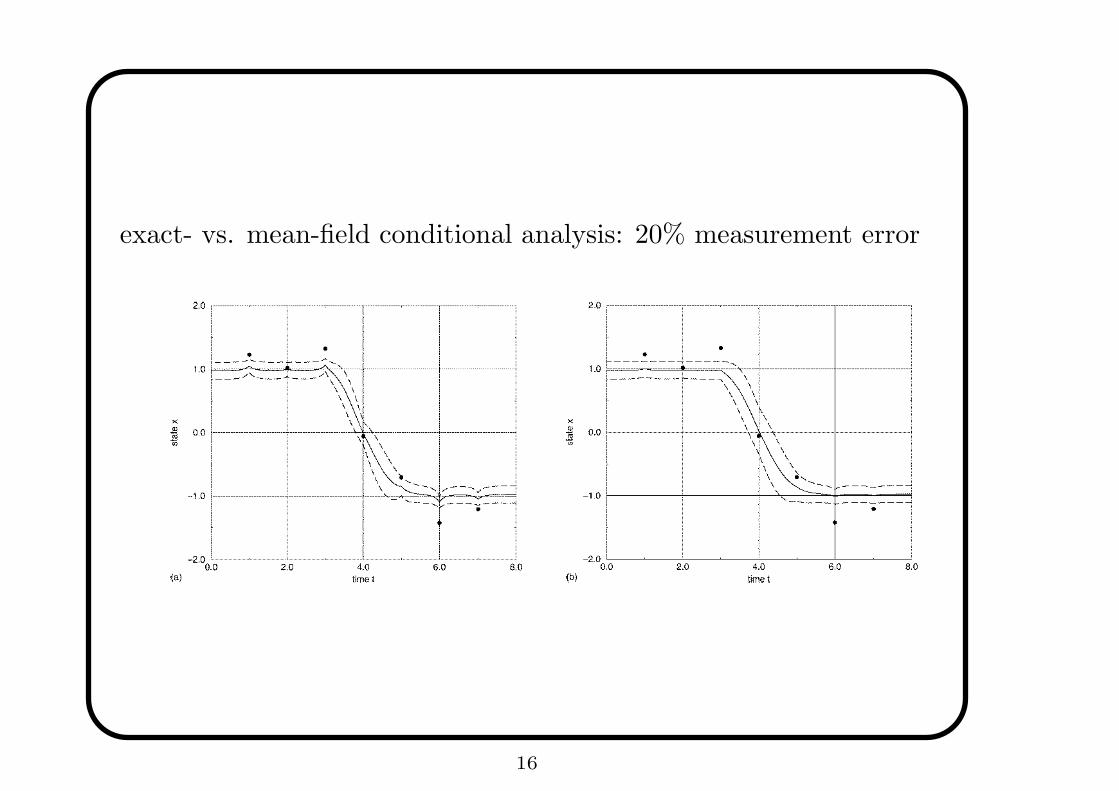
exact- vs. mean-field conditional analysis: 20% measurement error
16

exact- vs. mean-field conditional analysis: 40% measurement error
17

Mean-Field Variational Method with Moment-Closure
18
Other methods for non-linear filtering/smoothing
• Extended KF → Ensemble KF → Unscented KF;
• Markov Chain Monte Carlo
• Interacting particle approximation → particle filtering
• Variational Gaussian Process Approximation
19
Related Documents











