uth and sciences club: tea

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Youth and sciences club: team1

Team members:
Jegham Heni
Jegham Meriem
Oussema Hamdi
Rami Lahouar
Ben Ftima Bechir

Our biographies:
Team leader: Heni Jegham
Age: 23
field of study : 3rd year mecatronical-engineering.
University: national Engineering school of sousse

Jegham Meriem
Age: 21
field of study : 1st year electronical-engineering.
University: national Engineering school of sousse
Oussema Hamdi
Age: 21
field of study : 2nd year electronical-engineering.
University: national Engineering school of sousse

Lahouar Rami
Age: 21
field of study : 1st year telecommunication-engineering.
University: Higher School of Communication of Tunis.

Ben Ftima Bechir
Age: 25
field of study : mecanical-manufactoring
University: Center of training Tafela Sousse.

Project plan:
1- Mecanical part:2-Electronical part:3-Designing part:

1- Mecanical description:
We created an all-terrain autonomous robot with the aim to explore the planet Mars. it's mission is to dig big wholes in Mars surface when needed, without any external digging system.
The Robot “Digger “ is equipped with 6 wheels that makes it roll smoothly and even in hard conditions; each wheel is driven by it’s own DC engin.

1- Electronical description: *When it comes to the electronic part, we suggest to use The microcontroller, which drives the H bridges that can move the 6 wheels forwards and backwards independently such as (PIC32MZ1024ECG064) , and adopt the PCB with the conditions in Mars; such as radiations resistance.

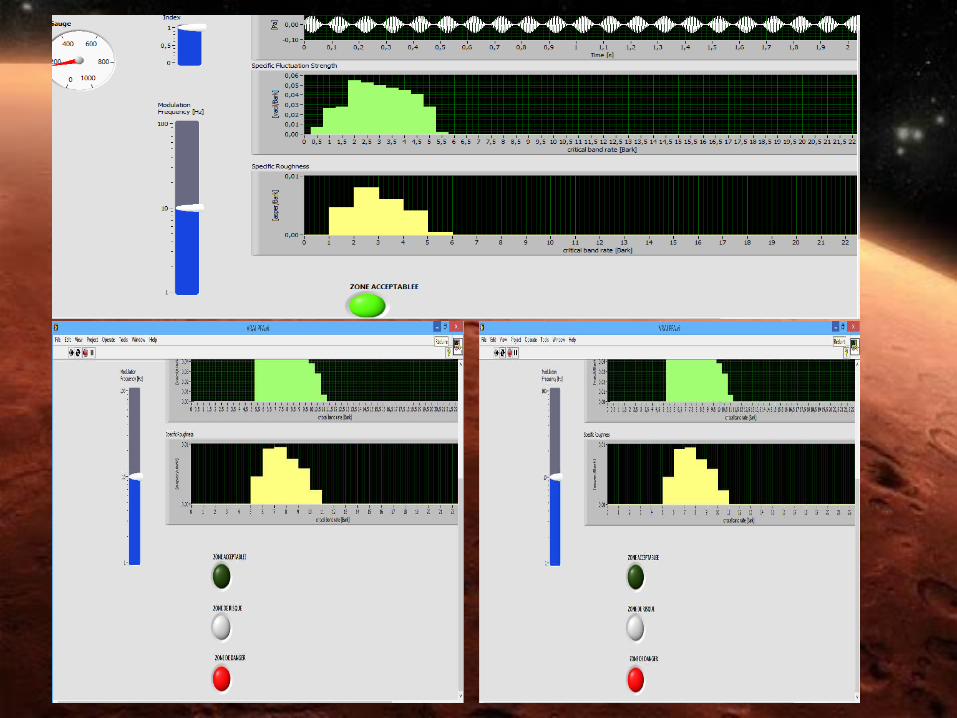
•We thaught about equiping the robot with a sensor that can detect certain frequency in the bandwidth.
for example : the bandwidth varies from 100Hz to 1000 Hz: if we divide it into ranges we can have the analysis below :
[100Hz,200Hz] : in this range we will have an indicator like a green lighted led. That means you ‘ astronomer’ you can here the sound easily and do not influence your ears sensitivity) .
[600,1000]: a red led lights. That means you cannot be able to hear anything and the hard sound will influence your ears sensitivity thus to say you astronomer aren’t the ideal one for this mission.
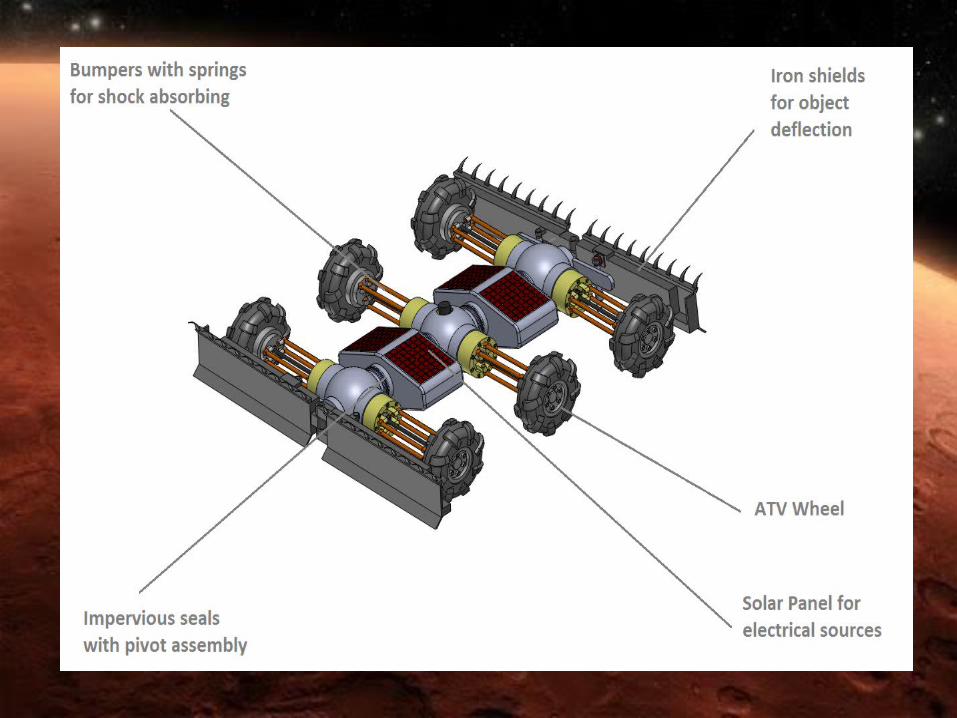

The drive shaft can rotate in a range of 60° around the main axe to allow the robot to avoid obstacals.

The drill is made from titanium to surve as an anchor to make the robot stable while spining.

The robot is able to spin aroud itself by inverting the rotation of wheels. As the shield are deployed. The robot is able to move sand.
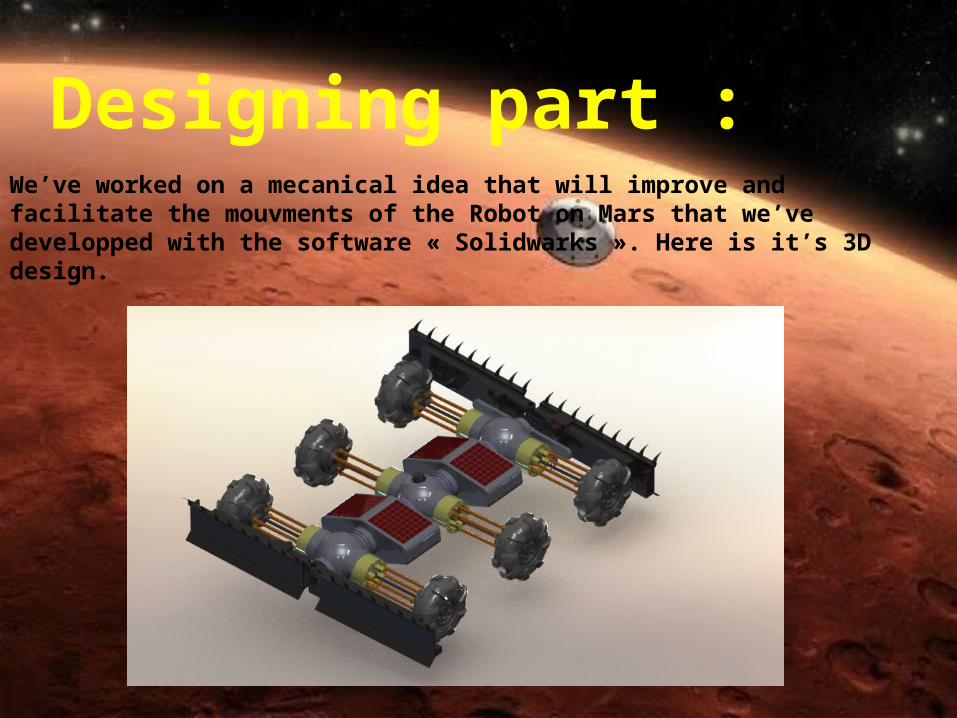
1- Designing part :We’ve worked on a mecanical idea that will improve and facilitate the mouvments of the Robot on Mars that we’ve developped with the software « Solidwarks ». Here is it’s 3D design.

Thank you for your attention..
Related Documents











