中華大學資訊工程學系 105 學年度專題製作期末報告 智慧生活椅 指導老師:游坤明 教授 組長:楊智勝(B10202096) 組員:丁思榕(B10202092) 洪維駿(B10202084) 中華民國 106 年 01 月

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
中華大學資訊工程學系
105 學年度專題製作期末報告
智慧生活椅
指導老師:游坤明 教授
組長:楊智勝(B10202096)
組員:丁思榕(B10202092)
洪維駿(B10202084)
中華民國 106 年 01 月
i
摘要
現代科技自動化日趨重要,人們都講求便利及效率,因此這次專題我們從離
不開我們生活的椅子做延伸。椅子的功能可以自動調整高低,目前對於椅子科技
的研究莫過於跟隨亦或者是歸位,都是椅子功能中與移動相關的,而我們此次專
題所設計的椅子,則與其不同。以往的椅子都是需要手動調整,既不便利也沒效
率,手動調整完的座椅高度,並不一定是符合人體工學的高度,但對於久坐的人
來說健康的椅子高度是非常重要的,適當的座椅高度導致良好的坐姿,對於人們
身體健康的影響也是極大的。
智慧生活椅可依照人體工學自動調整椅子高度,使用 Raspberry Pi 3 嵌入式
系統辨識身高、控制椅子升降,另將椅子伸縮桿換成電動推桿。並加入手機 APP
功能,利用 Raspberry Pi 3 內建藍牙使手機更方便連接,因此,我們的智慧生活
椅不僅為大家帶來了自動化的方便,更創造了舒適的生活環境。
ii
目錄
第一章 研究動機與目標 .............................................................................. 1
1. 動機 ................................................................................................... 1
2. 目標 ................................................................................................... 1
第二章 相關技術介紹 .................................................................................. 2
第三章 系統實作 ........................................................................................ 10
1. 系統規劃 ......................................................................................... 10
2. 研究方法 ......................................................................................... 14
3. 系統流程圖 ..................................................................................... 18
4. 完成之工作項目甘特圖.................................................................. 19
5. 遭遇問題與解決方案 ..................................................................... 20
第四章 來展望與結語 ................................................................................ 22
參考文獻 ..................................................................................................... 23
iii
圖目錄
圖 2-1 Raspberry Pi 3 .............................................................................. 2
圖 2-2 Raspberry Pi Camera Module V2 .................................................. 3
圖 2-3 直流馬達控制模組 L298N .......................................................... 4
圖 2-4 MIT APP Inventor 2 Logo ............................................................. 6
圖 2-5 維奧拉和瓊斯的部分特徵 ........................................................... 7
圖 2-6 計算矩形陰影部分的像素和 ....................................................... 8
圖 2-7 舒適坐姿(人體工學) ................................................................... 9
圖 3-1 系統規劃架構 ............................................................................ 10
圖 3-2 椅子半完成圖 ............................................................................ 13
圖 3-3 椅子完成圖(1) .......................................................................... 13
圖 3-4 椅子完成圖(2) .......................................................................... 14
圖 3-5 辨識結果 .................................................................................... 15
圖 3-6 手機 APP 介面 ........................................................................... 17
圖 3-7 MIT APP Inventor 2 UI 設計界面 .............................................. 17
圖 3-8 MIT APP Inventor 2 程式界面 .................................................. 17
圖 3-9 流程圖 ........................................................................................ 18
iv
表目錄
表 2-1 Raspberry Pi 3 規格 ...................................................................... 2
表 2-2 Raspberry Pi Camera Module V2 規格 ......................................... 4
表 2-3 直流馬達控制模組 L298N .......................................................... 5
表 3-1 各平台比較表 ............................................................................ 11
表 3-2 系統開發之工具與平台 ............................................................. 12
表 3-3 分段校正數據 ............................................................................ 16
1
第一章 研究動機與目標
1. 動機
隨著時代的演變,科技的進步,嵌入式系統越來越普遍,自動化的
產品隨處可見,例如:智慧型電視、智慧型手錶等,嵌入式系統運算與
功能的躍進,智能家具能做到的事情也越來越多,不再僅僅只是開關電
源,像荷蘭圖書館,將椅子設計成能跟隨著顧客移動,讓顧客能在找到
喜歡的書後能夠馬上坐下閱讀,日本的智慧辦公椅,在會議室中,透過
安裝在角落的偵測系統與在椅子上的嵌入式系統,讓椅子達到自動歸位
的目的、又或者是 Intel 透過電腦控制無人機上的嵌入式系統,以一人
控制五百台的無人機進行各種 3D 圖案的排列,嵌入式系統漸漸朝著生
活化的方向發展,讓科技更貼近生活。
2. 目標
仔細想想,從早晨起床開始算起,吃早餐要坐著,搭交通工具要坐
著,如果是辦公族,工作期間更是要久坐。現在大家都注重健康,椅子
離不開我們的生活,長時間不良的坐姿,常導致肩頸酸痛甚至腰痛,因
此,我們想設計一種可以自動辨識身高,能依照人體工學調整高度的椅
子,讓人們可以不用手動調整椅子,就能健康的坐在椅子上。
2
第二章 相關技術介紹
嵌入式系統發展快速,現今市面上有許多選擇,像是常見的 Arduino、
BeagleBoard、PandaBoard、或是由 Nvidia 推出的 Tx1,但最終我們選擇了 Raspberry
Pi 3 來做我們主要的系統模組,不僅因為效能較好,在整體上更符合我們的需求。
Raspberry Pi 3
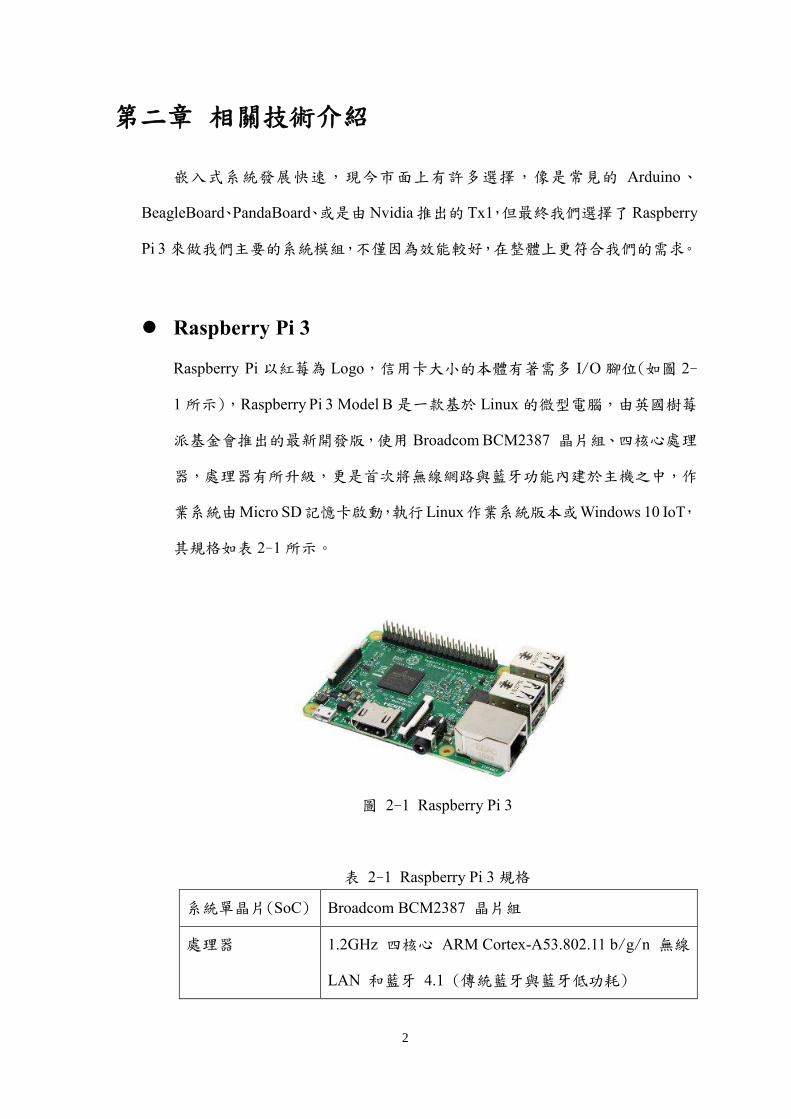
Raspberry Pi 以紅莓為 Logo,信用卡大小的本體有著需多 I/O 腳位(如圖 2-
1 所示),Raspberry Pi 3 Model B 是一款基於 Linux 的微型電腦,由英國樹莓
派基金會推出的最新開發版,使用 Broadcom BCM2387 晶片組、四核心處理
器,處理器有所升級,更是首次將無線網路與藍牙功能內建於主機之中,作
業系統由Micro SD記憶卡啟動,執行Linux作業系統版本或Windows 10 IoT,
其規格如表 2-1 所示。
圖 2-1 Raspberry Pi 3
表 2-1 Raspberry Pi 3 規格
系統單晶片(SoC) Broadcom BCM2387 晶片組
處理器 1.2GHz 四核心 ARM Cortex-A53.802.11 b/g/n 無線
LAN 和藍牙 4.1 (傳統藍牙與藍牙低功耗)
3
GPU 雙核心 VideoCore IVR 多媒體協同處理器。提供 Open
GL ES 2.0、硬體加速 OpenVG,以及 1080p30 H.264
高 型 解 碼 。 支 援 1Gpixel/s 、 1.5Gtexel/s 或
24GFLOPs,並具備材質過濾功能與 DMA 基礎架構
記憶體 1GB LPDDR2
作業系統 由 Micro SD 記憶卡啟動,執行 Linux 作業系統版本
或 Windows 10 IoT
USB 2.0 介面個數 4
外設 14 個 GPIO 及 HAT 規格鋪設
尺寸 85 x 56 x 17mm
電源 Micro USB 插槽 5V1,2.5A
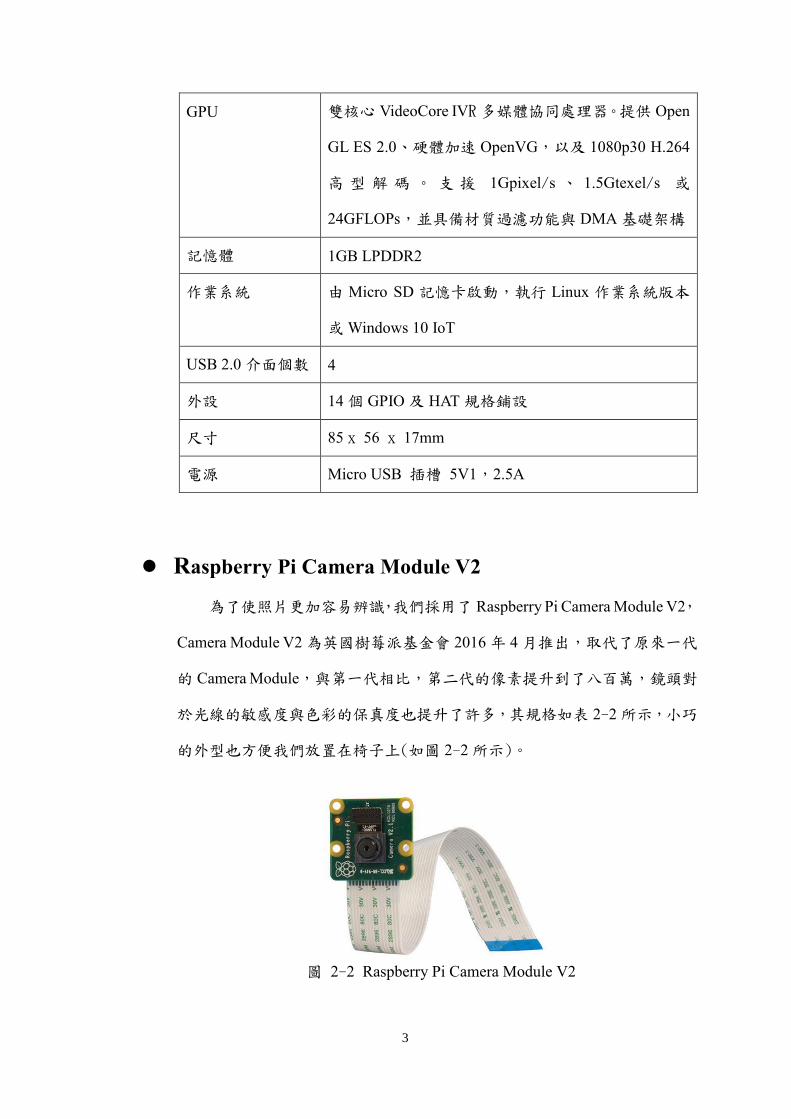
Raspberry Pi Camera Module V2
為了使照片更加容易辨識,我們採用了 Raspberry Pi Camera Module V2,
Camera Module V2 為英國樹莓派基金會 2016 年 4 月推出,取代了原來一代
的 Camera Module,與第一代相比,第二代的像素提升到了八百萬,鏡頭對
於光線的敏感度與色彩的保真度也提升了許多,其規格如表 2-2 所示,小巧
的外型也方便我們放置在椅子上(如圖 2-2 所示)。
圖 2-2 Raspberry Pi Camera Module V2
4
表 2-2 Raspberry Pi Camera Module V2 規格
影像感測器 Sony IMX219 image sensor in a fxed-focus
module with integral IR filter
解析度 800 萬像素
靜態圖像解析度 3280 × 2464
最大影像轉換速率 1080p30: 720p60; 640x480p90
端口 15 Pin MIPI Camera Serial Interface (CSI-2)
鏡頭尺寸 1/4”
外型尺寸 23 x 25 x 9 (mm)
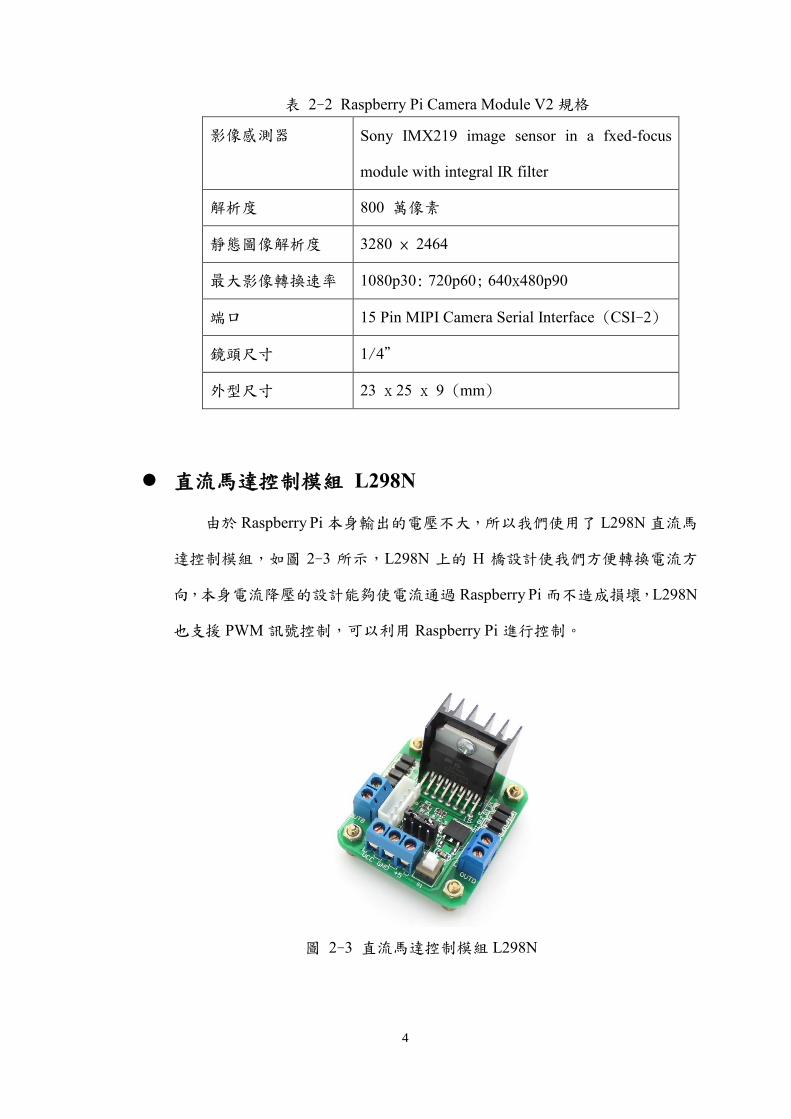
直流馬達控制模組 L298N
由於 Raspberry Pi 本身輸出的電壓不大,所以我們使用了 L298N 直流馬
達控制模組,如圖 2-3 所示,L298N 上的 H 橋設計使我們方便轉換電流方
向,本身電流降壓的設計能夠使電流通過 Raspberry Pi 而不造成損壞,L298N
也支援 PWM 訊號控制,可以利用 Raspberry Pi 進行控制。
圖 2-3 直流馬達控制模組 L298N
5
L298N 是 ST 公司生產的一種高電壓、大電流電機驅動晶片。該晶片採
用 15 腳封裝。主要特點是:工作電壓高,最高工作電壓可達 46V;輸出電
流大,瞬間峰值電流可達 3A,持續工作電流為 2A;額定功率 25W。內含兩
個 H 橋的高電壓大電流全橋式驅動器,可以用來驅動直流馬達和步進馬達、
繼電器線圈等感性負載;採用標準邏輯電平信號控制;具有兩個使能控制端,
在不受輸入信號影響的情況下允許或禁止器件工作有一個邏輯電源輸入端,
使內部邏輯電路部分在低電壓下工作;可以外接檢測電阻,將變化量反饋給
控制電路。使用 L298N 晶片驅動馬達,該晶片可以驅動一台兩相步進馬達
或四相步進馬達,也可以驅動兩台直流馬達,其規格如表 2-3 所示。
L298N 作為主驅動晶片,具有驅動能力強,發熱量低,抗干擾能力強的
特點。
內置的 78M05 通過驅動電源部分取電工作,但是為了避免穩壓芯片損
壞,當使用大於 12V 驅動電壓的時候,請使用外置的 5V 邏輯供電。
使用大容量濾波電容,續流保護二極管,可以提高可靠性。
表 2-3 直流馬達控制模組 L298N
主控晶片 L298N
降壓晶片 78M05
電壓 5V
驅動電壓 5V~35V
電流 0mA~36mA
驅動電流 2A
工作溫度 -20℃~135℃
最大功率 25W
尺 寸 43 x 43 x 29 (mm)
重 量 30g
6
MIT APP Inventor 2
App Inventor 原為 Google 提供的應用軟體,現在由麻省理工學院維護及
營運。它使用圖形化界面,非常類似於 Scratch 語言和 StarLogo TNG 用戶界
面。使用者可以拖放圖形對象來創造一個運行在 Android 系統上的應用,就
可以在許多手機設備上運行。麻省理工學院在 2013 年 12 月 3 日推出 MIT
App Inventor 2 網站,提供免費的雲端服務,使用者可以透過瀏覽器來開發
Android 裝置應用程式。App Inventor 2 主要開發對象為 Android,所以在
Logo(如圖 2-4 所示)上能看到代表 Android 的小綠人。
圖 2-4 MIT APP Inventor 2 Logo
哈爾特徵(Haar-Like features)辨識
哈爾特徵是用於物體識別的一種數位影像特徵。它們因為與哈爾小波轉
換非常相似而得名,是第一種實時的人臉檢測因子。在過去直接使用圖像的
強度(就是圖像每一個像素點的 RGB 值)使得特徵計算的 RGB 值較大。帕
帕喬治奧等人提出可以使用基於哈爾小波的特徵而不是圖像強度。維奧拉
(Viola)和瓊斯(Jones)進而提出了哈爾特徵。哈爾特徵使用檢測窗口中指定
位置的相鄰矩形,計算每一個矩形的像素和並取其差值。然後用這些差值來
對圖像的子區域進行分類。
例如,當前有一個人臉圖像集合。通過觀察可以發現,眼睛的顏色要比
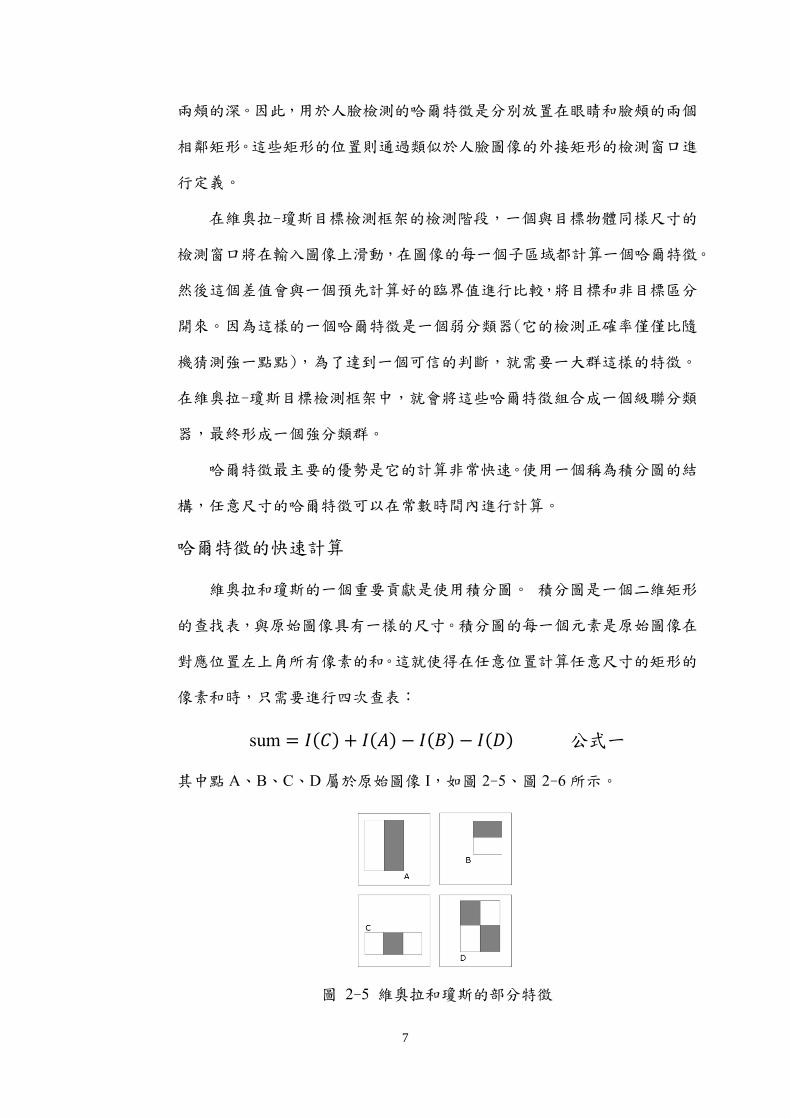
7
兩頰的深。因此,用於人臉檢測的哈爾特徵是分別放置在眼睛和臉頰的兩個
相鄰矩形。這些矩形的位置則通過類似於人臉圖像的外接矩形的檢測窗口進
行定義。
在維奧拉-瓊斯目標檢測框架的檢測階段,一個與目標物體同樣尺寸的
檢測窗口將在輸入圖像上滑動,在圖像的每一個子區域都計算一個哈爾特徵。
然後這個差值會與一個預先計算好的臨界值進行比較,將目標和非目標區分
開來。因為這樣的一個哈爾特徵是一個弱分類器(它的檢測正確率僅僅比隨
機猜測強一點點),為了達到一個可信的判斷,就需要一大群這樣的特徵。
在維奧拉-瓊斯目標檢測框架中,就會將這些哈爾特徵組合成一個級聯分類
器,最終形成一個強分類群。
哈爾特徵最主要的優勢是它的計算非常快速。使用一個稱為積分圖的結
構,任意尺寸的哈爾特徵可以在常數時間內進行計算。
哈爾特徵的快速計算
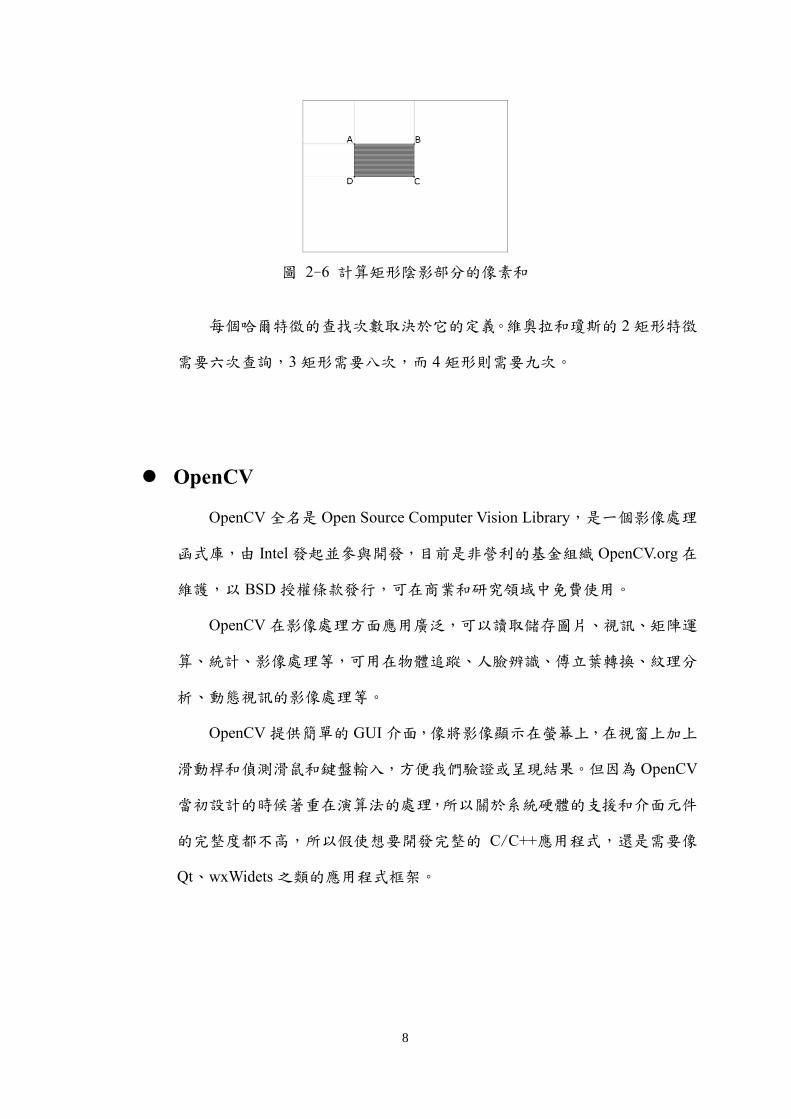
維奧拉和瓊斯的一個重要貢獻是使用積分圖。 積分圖是一個二維矩形
的查找表,與原始圖像具有一樣的尺寸。積分圖的每一個元素是原始圖像在
對應位置左上角所有像素的和。這就使得在任意位置計算任意尺寸的矩形的
像素和時,只需要進行四次查表:
sum = 𝐼(𝐶) + 𝐼(𝐴) − 𝐼(𝐵) − 𝐼(𝐷) 公式一
其中點 A、B、C、D 屬於原始圖像 I,如圖 2-5、圖 2-6 所示。
圖 2-5 維奧拉和瓊斯的部分特徵
8
圖 2-6 計算矩形陰影部分的像素和
每個哈爾特徵的查找次數取決於它的定義。維奧拉和瓊斯的 2 矩形特徵
需要六次查詢,3 矩形需要八次,而 4 矩形則需要九次。
OpenCV
OpenCV 全名是 Open Source Computer Vision Library,是一個影像處理
函式庫,由 Intel 發起並參與開發,目前是非營利的基金組織 OpenCV.org 在
維護,以 BSD 授權條款發行,可在商業和研究領域中免費使用。
OpenCV 在影像處理方面應用廣泛,可以讀取儲存圖片、視訊、矩陣運
算、統計、影像處理等,可用在物體追蹤、人臉辨識、傅立葉轉換、紋理分
析、動態視訊的影像處理等。
OpenCV 提供簡單的 GUI 介面,像將影像顯示在螢幕上,在視窗上加上
滑動桿和偵測滑鼠和鍵盤輸入,方便我們驗證或呈現結果。但因為 OpenCV
當初設計的時候著重在演算法的處理,所以關於系統硬體的支援和介面元件
的完整度都不高,所以假使想要開發完整的 C/C++應用程式,還是需要像
Qt、wxWidets 之類的應用程式框架。
9
人體工學
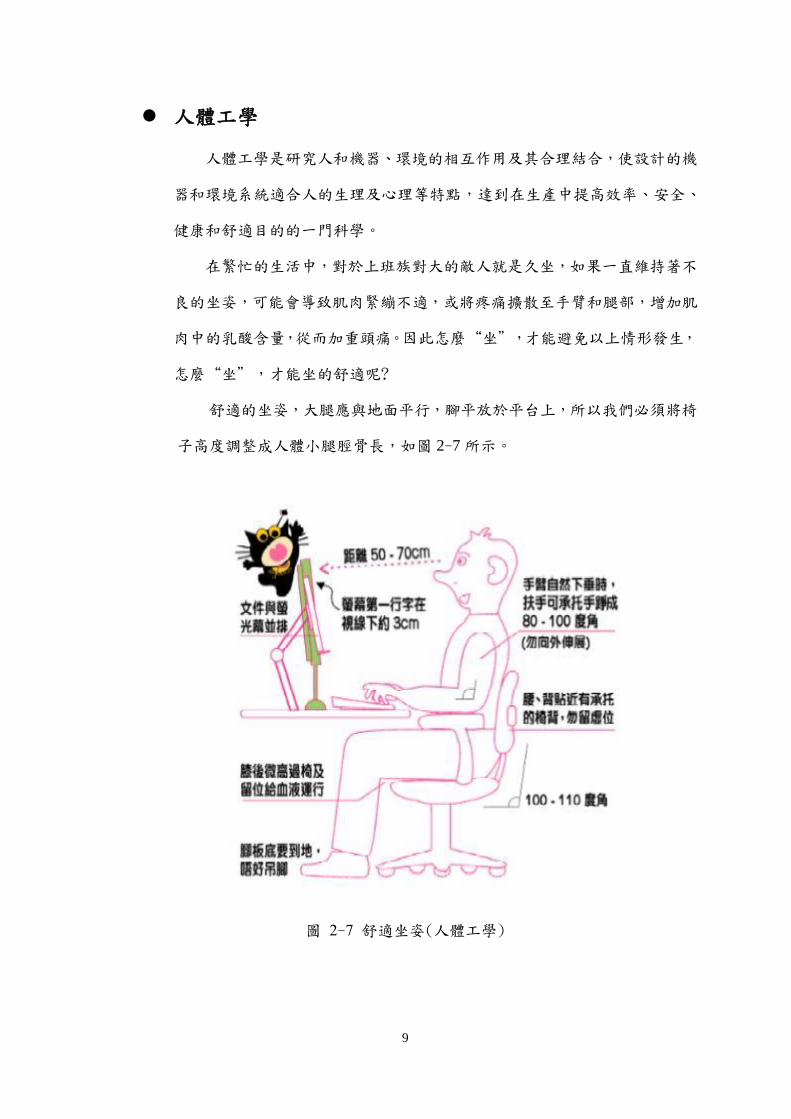
人體工學是研究人和機器、環境的相互作用及其合理結合,使設計的機
器和環境系統適合人的生理及心理等特點,達到在生產中提高效率、安全、
健康和舒適目的的一門科學。
在繁忙的生活中,對於上班族對大的敵人就是久坐,如果一直維持著不
良的坐姿,可能會導致肌肉緊繃不適,或將疼痛擴散至手臂和腿部,增加肌
肉中的乳酸含量,從而加重頭痛。因此怎麼“坐”,才能避免以上情形發生,
怎麼“坐”,才能坐的舒適呢?
舒適的坐姿,大腿應與地面平行,腳平放於平台上,所以我們必須將椅
子高度調整成人體小腿脛骨長,如圖 2-7 所示。
圖 2-7 舒適坐姿(人體工學)
10
第三章 系統實作
專題分為硬體與軟體兩個部分,部分功能硬體無法達成的部分使用軟體
(程式)作為輔助,反之當軟體無法達成的部分則使用硬體作為支援,兩者交
互運用達到互補的目的,來解決設計上遇到的問題。
1. 系統規劃
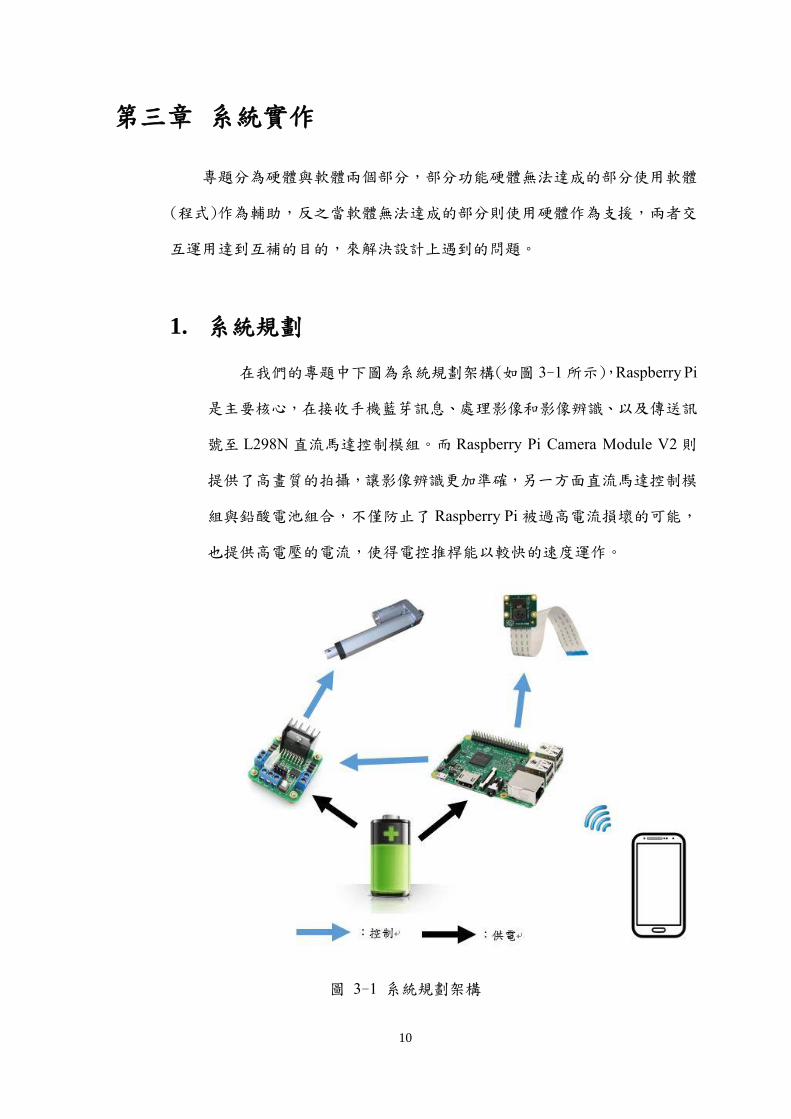
在我們的專題中下圖為系統規劃架構(如圖 3-1 所示),Raspberry Pi
是主要核心,在接收手機藍芽訊息、處理影像和影像辨識、以及傳送訊
號至 L298N 直流馬達控制模組。而 Raspberry Pi Camera Module V2 則
提供了高畫質的拍攝,讓影像辨識更加準確,另一方面直流馬達控制模
組與鉛酸電池組合,不僅防止了 Raspberry Pi 被過高電流損壞的可能,
也提供高電壓的電流,使得電控推桿能以較快的速度運作。
圖 3-1 系統規劃架構
11
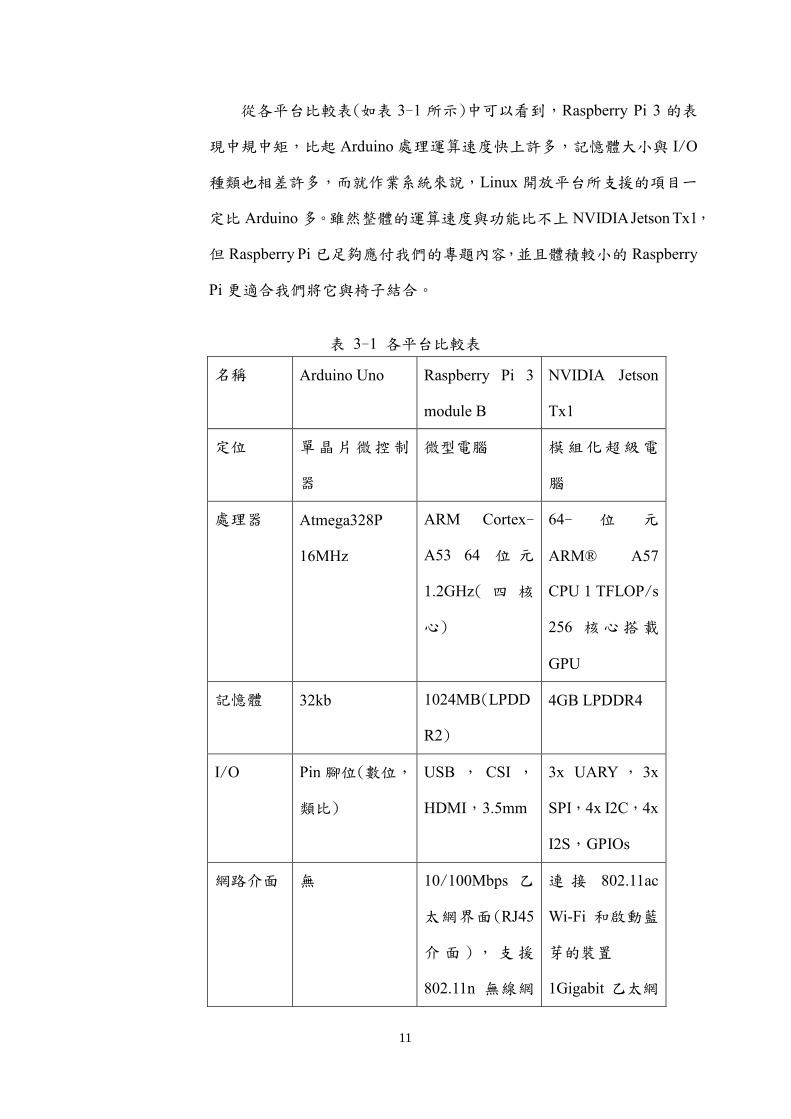
從各平台比較表(如表 3-1 所示)中可以看到,Raspberry Pi 3 的表
現中規中矩,比起 Arduino 處理運算速度快上許多,記憶體大小與 I/O
種類也相差許多,而就作業系統來說,Linux 開放平台所支援的項目一
定比 Arduino 多。雖然整體的運算速度與功能比不上 NVIDIA Jetson Tx1,
但 Raspberry Pi 已足夠應付我們的專題內容,並且體積較小的 Raspberry
Pi 更適合我們將它與椅子結合。
表 3-1 各平台比較表
名稱 Arduino Uno Raspberry Pi 3
module B
NVIDIA Jetson
Tx1
定位 單晶片微控制
器
微型電腦 模組化超級電
腦
處理器 Atmega328P
16MHz
ARM Cortex-
A53 64 位 元
1.2GHz( 四 核
心)
64- 位 元
ARM® A57
CPU 1 TFLOP/s
256 核心搭載
GPU
記憶體 32kb 1024MB(LPDD
R2)
4GB LPDDR4
I/O Pin 腳位(數位,
類比)
USB , CSI ,
HDMI,3.5mm
3x UARY , 3x
SPI,4x I2C,4x
I2S,GPIOs
網路介面 無 10/100Mbps 乙
太網界面(RJ45
介 面 ) , 支 援
802.11n 無線網
連 接 802.11ac
Wi-Fi 和啟動藍
芽的裝置
1Gigabit 乙太網
12
路及藍芽 4.1 路
系統 Arduino Linux Linux
電源輸入 5V 5V 19V4.74A
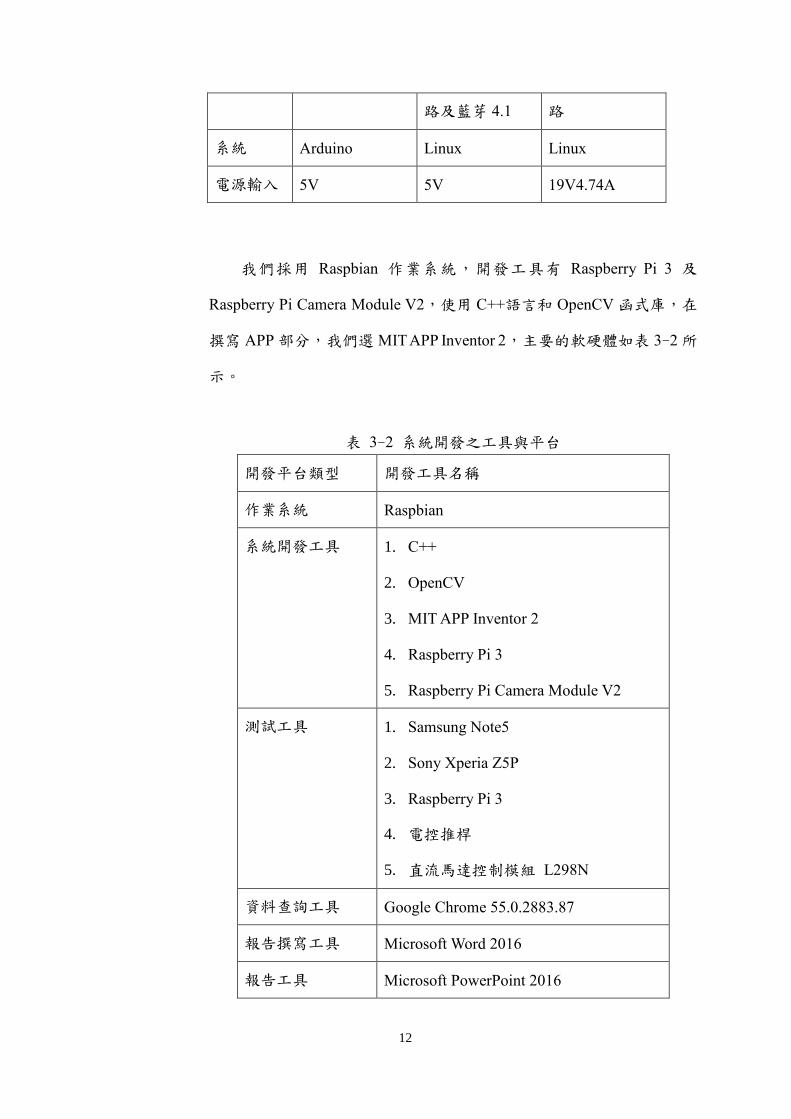
我們採用 Raspbian 作業系統,開發工具有 Raspberry Pi 3 及
Raspberry Pi Camera Module V2,使用 C++語言和 OpenCV 函式庫,在
撰寫 APP 部分,我們選 MIT APP Inventor 2,主要的軟硬體如表 3-2 所
示。
表 3-2 系統開發之工具與平台
開發平台類型 開發工具名稱
作業系統 Raspbian
系統開發工具 1. C++
2. OpenCV
3. MIT APP Inventor 2
4. Raspberry Pi 3
5. Raspberry Pi Camera Module V2
測試工具 1. Samsung Note5
2. Sony Xperia Z5P
3. Raspberry Pi 3
4. 電控推桿
5. 直流馬達控制模組 L298N
資料查詢工具 Google Chrome 55.0.2883.87
報告撰寫工具 Microsoft Word 2016
報告工具 Microsoft PowerPoint 2016
13
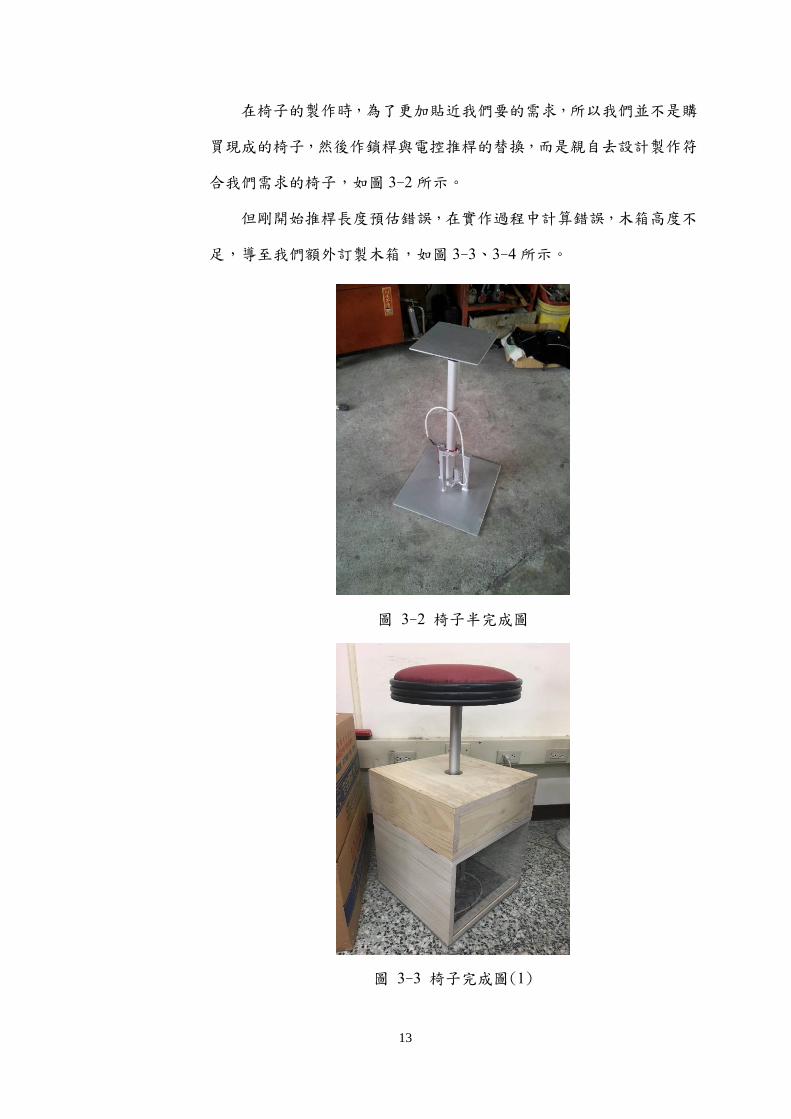
在椅子的製作時,為了更加貼近我們要的需求,所以我們並不是購
買現成的椅子,然後作鎖桿與電控推桿的替換,而是親自去設計製作符
合我們需求的椅子,如圖 3-2 所示。
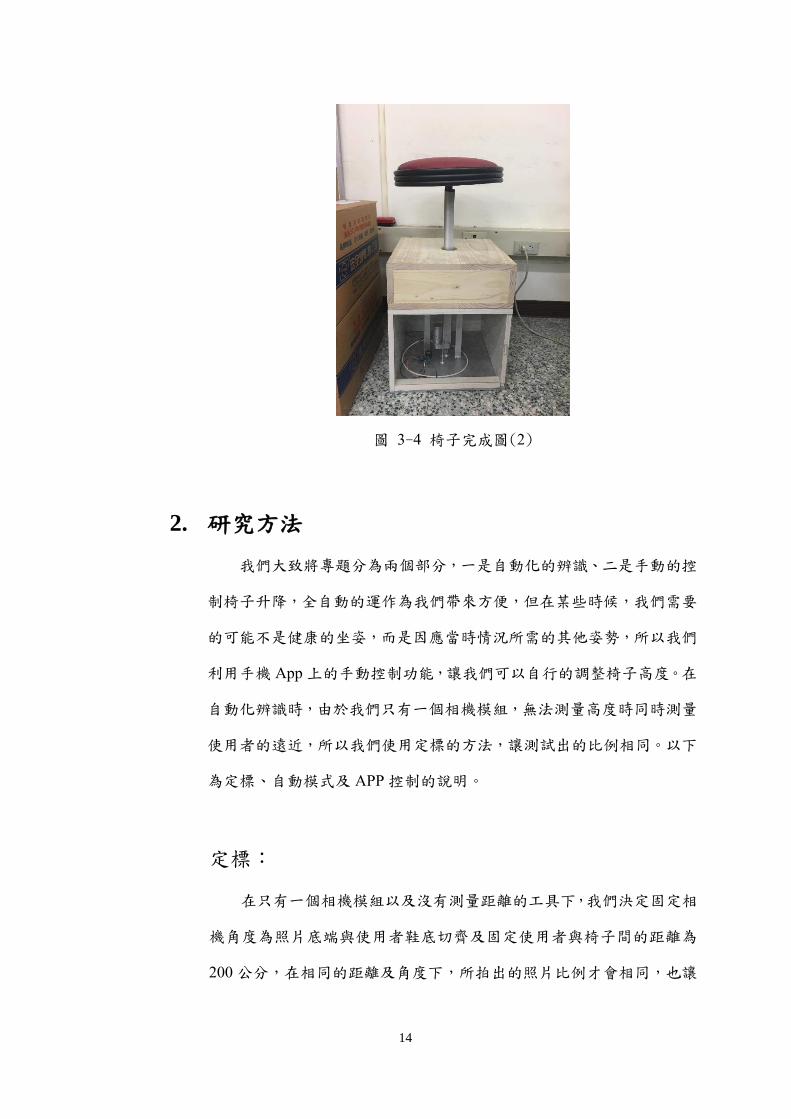
但剛開始推桿長度預估錯誤,在實作過程中計算錯誤,木箱高度不
足,導至我們額外訂製木箱,如圖 3-3、3-4 所示。
圖 3-2 椅子半完成圖
圖 3-3 椅子完成圖(1)
14
圖 3-4 椅子完成圖(2)
2. 研究方法
我們大致將專題分為兩個部分,一是自動化的辨識、二是手動的控
制椅子升降,全自動的運作為我們帶來方便,但在某些時候,我們需要
的可能不是健康的坐姿,而是因應當時情況所需的其他姿勢,所以我們
利用手機 App 上的手動控制功能,讓我們可以自行的調整椅子高度。在
自動化辨識時,由於我們只有一個相機模組,無法測量高度時同時測量
使用者的遠近,所以我們使用定標的方法,讓測試出的比例相同。以下
為定標、自動模式及 APP 控制的說明。
定標:
在只有一個相機模組以及沒有測量距離的工具下,我們決定固定相
機角度為照片底端與使用者鞋底切齊及固定使用者與椅子間的距離為
200 公分,在相同的距離及角度下,所拍出的照片比例才會相同,也讓
15
我們做像素轉換長度的公式能更加穩定。
自動模式:
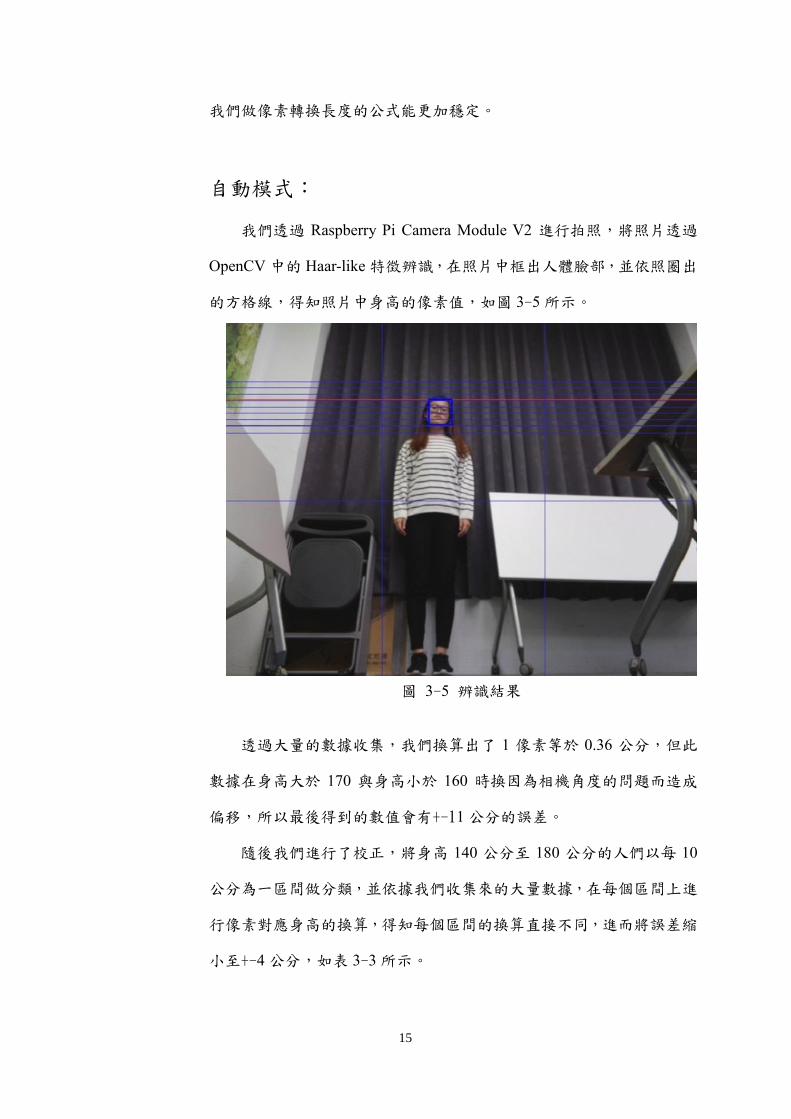
我們透過 Raspberry Pi Camera Module V2 進行拍照,將照片透過
OpenCV 中的 Haar-like 特徵辨識,在照片中框出人體臉部,並依照圈出
的方格線,得知照片中身高的像素值,如圖 3-5 所示。
圖 3-5 辨識結果
透過大量的數據收集,我們換算出了 1 像素等於 0.36 公分,但此
數據在身高大於 170 與身高小於 160 時換因為相機角度的問題而造成
偏移,所以最後得到的數值會有+-11 公分的誤差。
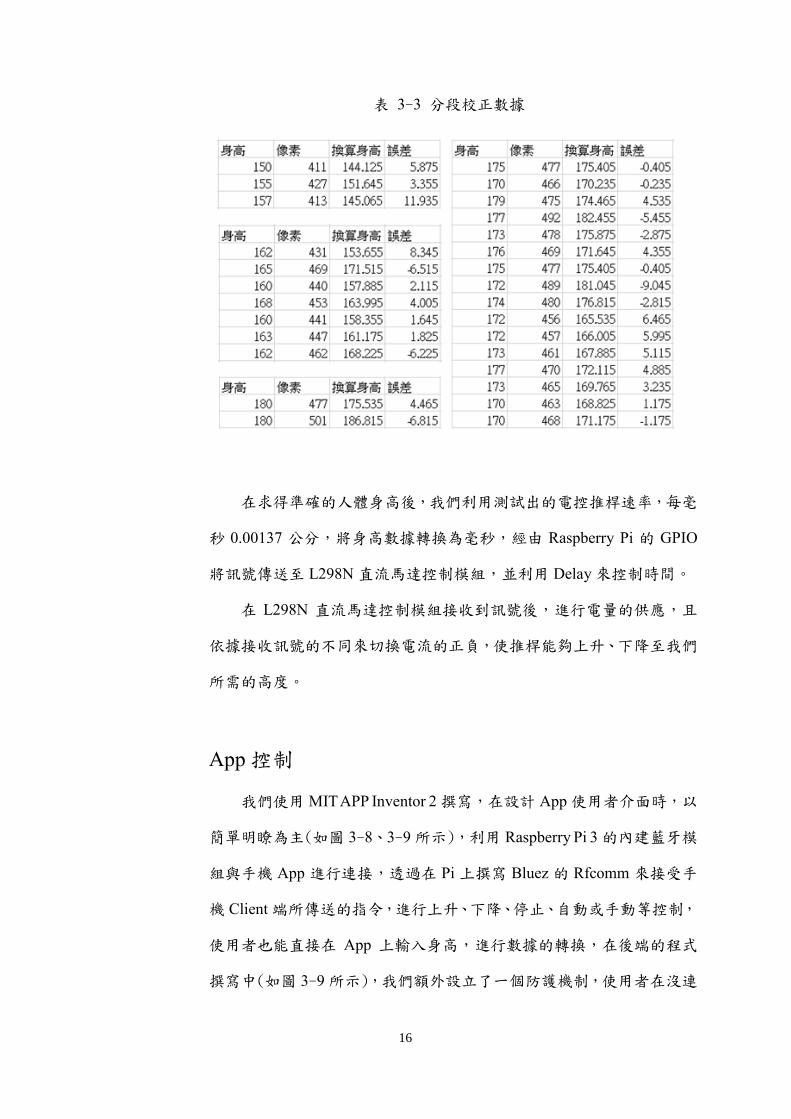
隨後我們進行了校正,將身高 140 公分至 180 公分的人們以每 10
公分為一區間做分類,並依據我們收集來的大量數據,在每個區間上進
行像素對應身高的換算,得知每個區間的換算直接不同,進而將誤差縮
小至+-4 公分,如表 3-3 所示。
16
表 3-3 分段校正數據
在求得準確的人體身高後,我們利用測試出的電控推桿速率,每毫
秒 0.00137 公分,將身高數據轉換為毫秒,經由 Raspberry Pi 的 GPIO
將訊號傳送至 L298N 直流馬達控制模組,並利用 Delay 來控制時間。
在 L298N 直流馬達控制模組接收到訊號後,進行電量的供應,且
依據接收訊號的不同來切換電流的正負,使推桿能夠上升、下降至我們
所需的高度。
App 控制
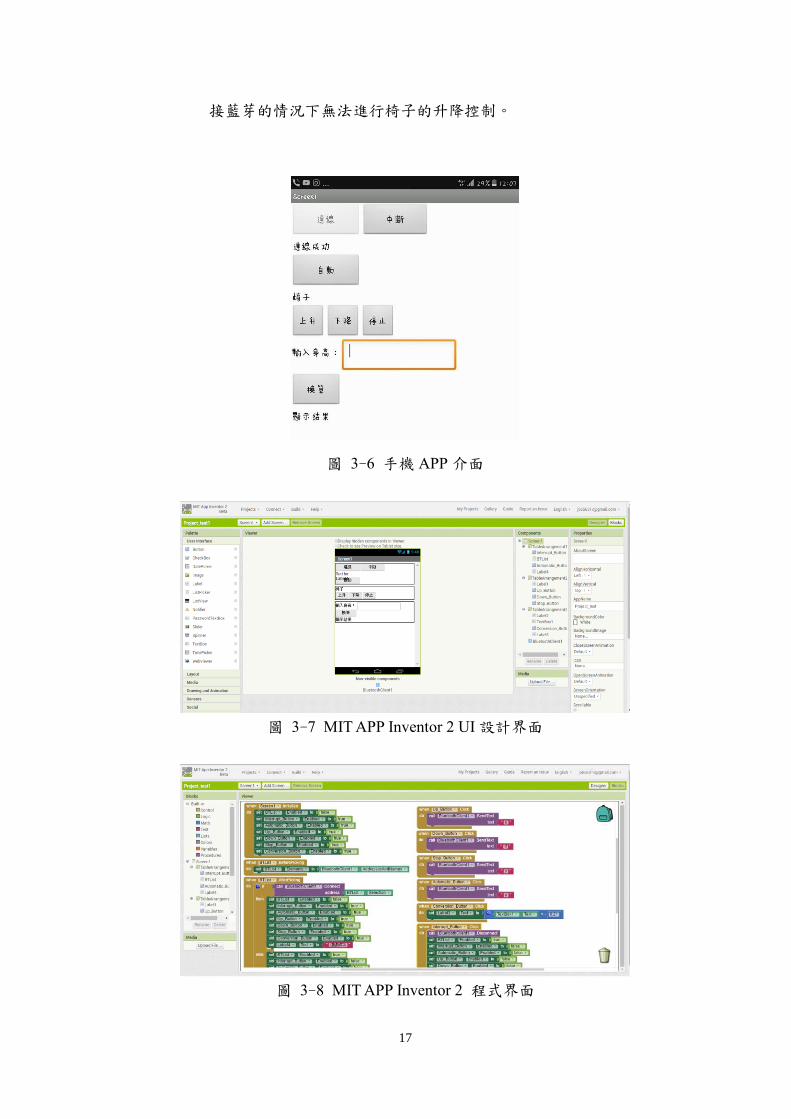
我們使用 MIT APP Inventor 2 撰寫,在設計 App 使用者介面時,以
簡單明瞭為主(如圖 3-8、3-9 所示),利用 Raspberry Pi 3 的內建藍牙模
組與手機 App 進行連接,透過在 Pi 上撰寫 Bluez 的 Rfcomm 來接受手
機 Client 端所傳送的指令,進行上升、下降、停止、自動或手動等控制,
使用者也能直接在 App 上輸入身高,進行數據的轉換,在後端的程式
撰寫中(如圖 3-9 所示),我們額外設立了一個防護機制,使用者在沒連
17
接藍芽的情況下無法進行椅子的升降控制。
圖 3-6 手機 APP 介面
圖 3-7 MIT APP Inventor 2 UI 設計界面
圖 3-8 MIT APP Inventor 2 程式界面
18
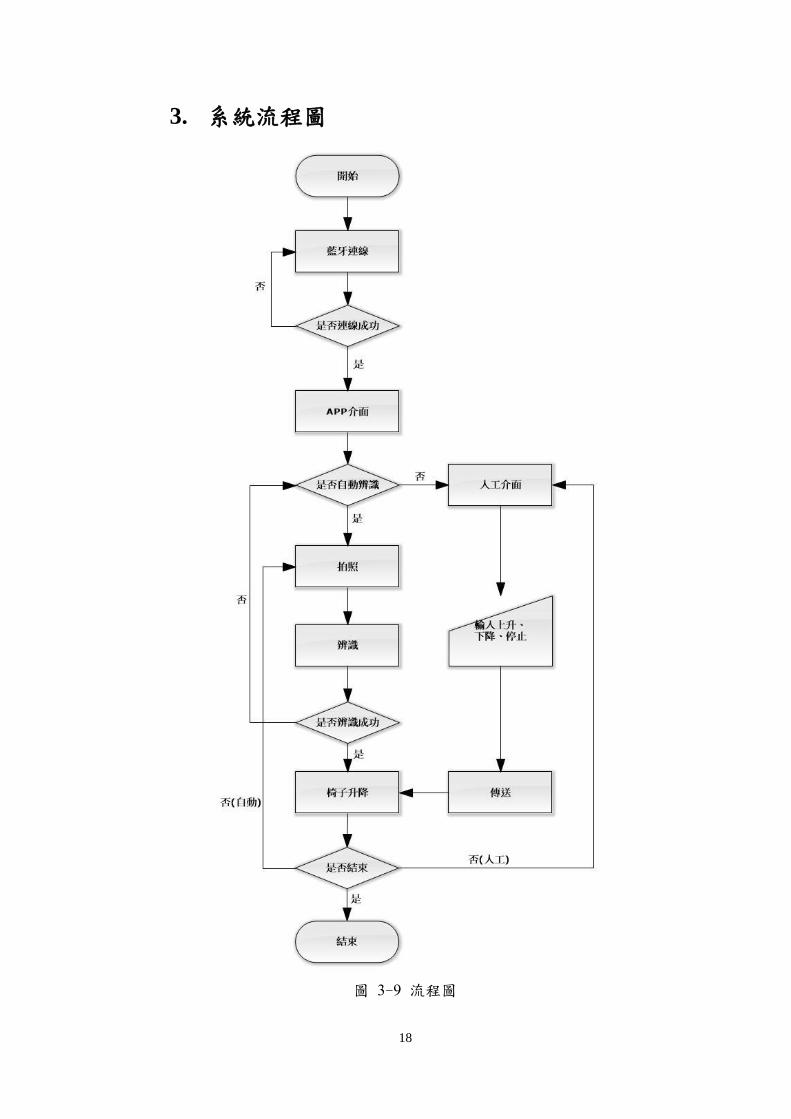
3. 系統流程圖
圖 3-9 流程圖
19
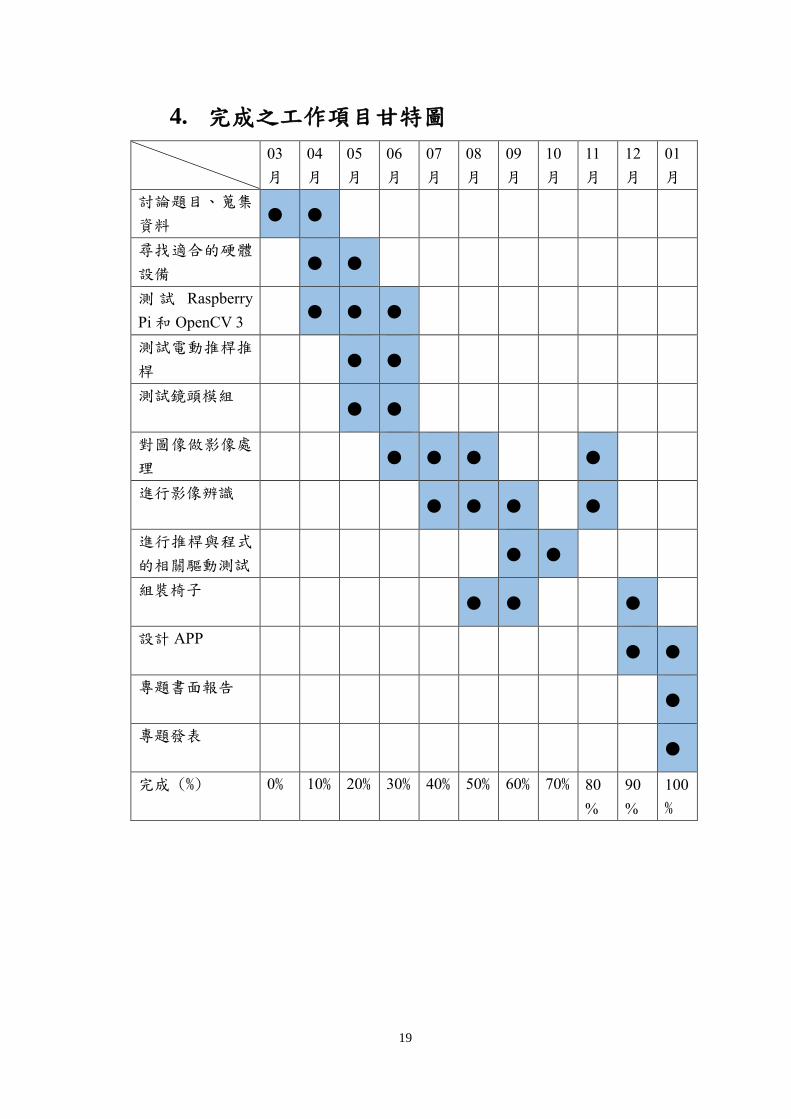
4. 完成之工作項目甘特圖
03
月
04
月
05
月
06
月
07
月
08
月
09
月
10
月
11
月
12
月
01
月
討論題目、蒐集
資料 ● ●
尋找適合的硬體
設備
● ●
測 試 Raspberry
Pi 和 OpenCV 3
● ● ●
測試電動推桿推
桿
● ●
測試鏡頭模組 ● ●
對圖像做影像處
理
● ● ●
●
進行影像辨識 ● ● ●
●
進行推桿與程式
的相關驅動測試
● ●
組裝椅子 ● ●
●
設計 APP ● ●
專題書面報告 ●
專題發表 ●
完成 (%) 0% 10% 20% 30% 40% 50% 60% 70% 80
%
90
%
100
%
20
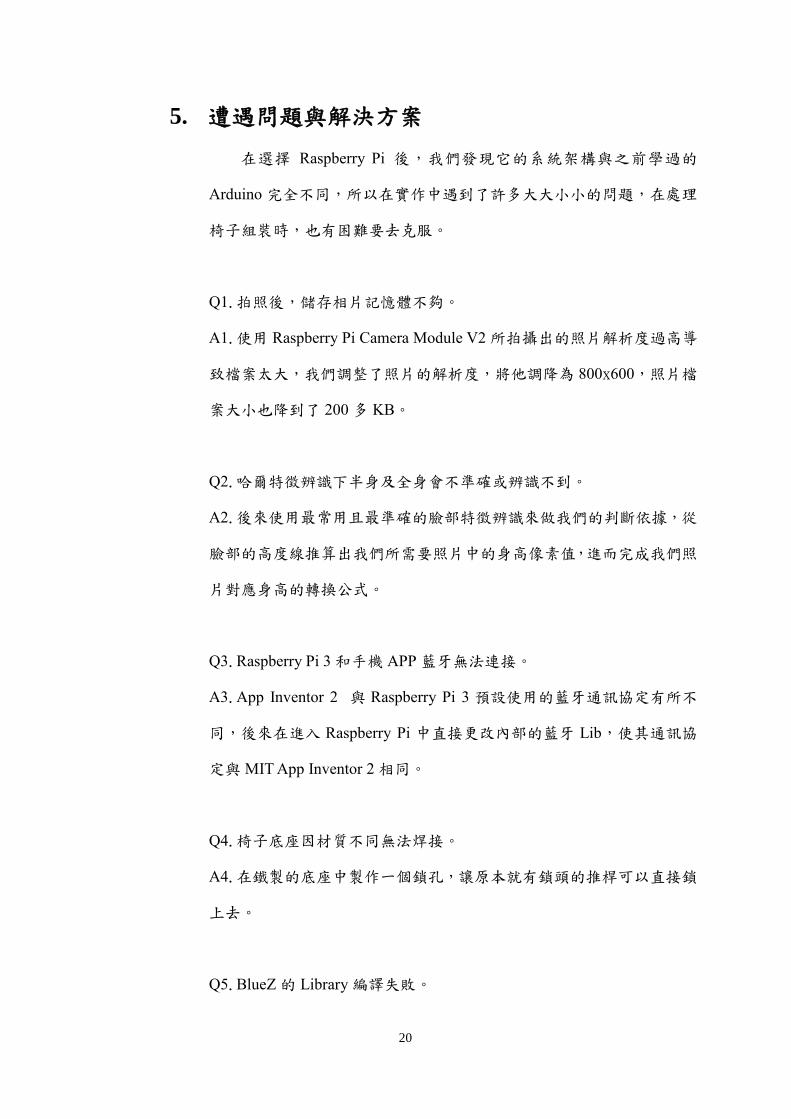
5. 遭遇問題與解決方案
在選擇 Raspberry Pi 後,我們發現它的系統架構與之前學過的
Arduino 完全不同,所以在實作中遇到了許多大大小小的問題,在處理
椅子組裝時,也有困難要去克服。
Q1.拍照後,儲存相片記憶體不夠。
A1.使用 Raspberry Pi Camera Module V2 所拍攝出的照片解析度過高導
致檔案太大,我們調整了照片的解析度,將他調降為 800x600,照片檔
案大小也降到了 200 多 KB。
Q2.哈爾特徵辨識下半身及全身會不準確或辨識不到。
A2.後來使用最常用且最準確的臉部特徵辨識來做我們的判斷依據,從
臉部的高度線推算出我們所需要照片中的身高像素值,進而完成我們照
片對應身高的轉換公式。
Q3.Raspberry Pi 3 和手機 APP 藍牙無法連接。
A3.App Inventor 2 與 Raspberry Pi 3 預設使用的藍牙通訊協定有所不
同,後來在進入 Raspberry Pi 中直接更改內部的藍牙 Lib,使其通訊協
定與 MIT App Inventor 2 相同。
Q4.椅子底座因材質不同無法焊接。
A4.在鐵製的底座中製作一個鎖孔,讓原本就有鎖頭的推桿可以直接鎖
上去。
Q5.BlueZ 的 Library 編譯失敗。
21
A5.重新安裝後解決。
Q6.辨識後誤差與理想值相差過大。
A6.使用校正將辨識區間縮小,以減少乘積後過大的誤差值。
22
第四章 未來展望與結語
在專題中,我們選擇了一個之前較不熟悉的 Raspberry Pi 3 嵌入式系統來作
為我們的開發工具。在專題的前期,我們在 Raspberry Pi 上嘗試了許多的作業系
統,例如:Windows 10 IoT 或者是 ubuntu,但最後還是 Raspberry Pi 原本的作業
系統 Raspbian 最適合、也最容易學習。因為我們要結合 OpenCV 所以也把原本
要使用的 Python 更改成了 C++,在經過許久的測試後,終於決定使用的系統、
語言等。在專題的中期,我們也遇到了一個很大的問題,使用 Raspberry Pi Camera
Module V2 只有單相機,所以 Haar-like 在做全身及半身辨識的時候,因為距離的
改變與角度的不同,比起雙相機或多相機,會有明顯且超過預期的誤差,最後我
們固定了使用者和椅子間的距離及校正來縮小誤差值。在專題的最後,藍牙連線
成為我們最大的問題,使用 MIT App Inventor 2 所做出來的 App 程式,與
Raspberry Pi 3 預設的通訊協定不一樣,在經過許多的尋找及測試後,更改了
Raspberry Pi 3 內部的 Bluetooth Lib 從而解決了此問題。在經過此專題的製作後,
我們初步的學習到了 Raspberry Pi 的運作與對於影像處理及辨識有了更進一步的
了解。在過程中,也體驗到團體分工合作的重要性,也培養了個人解決問題的能
力,相信這會是我們最大的收穫。
智慧生活椅目前可用 APP 控制和依照人體工學自動調整椅子高度,未來希
望將椅子加上輪子,讓椅子可以透過 WIFI 控制移動,例如:在舉辦演講時,需要
耗費大量的人力及時間在排列椅子上,如果能在短時間將椅子排列整齊,且依據
不同的演講風格設計不一樣的排列隊形。在外觀上,由於專題過程中一直修改,
如果是以要販售的商品來看,外觀設計需要更加美化。
23
參考文獻
參考書籍
[1] 開發 Android APP 使用 VB 輕鬆學. 資料庫與專題製作篇
[2] Android 程式設計範例經典: : 讓您設計出專業級的 Android 應用程式
[3] 開發 Android App 使用 App Inventor 2 輕鬆學
[4] 手機應用程式設計超簡單 : App Inventor 2 專題特訓班
[5] Android 關鍵技術: : 102 個核心問題解決方案
參考網站
[1] https://goo.gl/fwKHi6
[2] https://goo.gl/p5ieNs
[3] https://goo.gl/AlP7zf
[4] https://goo.gl/Kck6GY
[5] https://goo.gl/Hw5tzC
[6] https://goo.gl/pUh4r4
[7] https://goo.gl/411reH
[8] https://goo.gl/fXrQfS
[9] https://goo.gl/L7xjhR
[10] https://goo.gl/J2dYn3
[11] https://goo.gl/sJcDyZ
[12] https://goo.gl/FZ4exZ
[13] https://goo.gl/MZD8MH
[14] https://goo.gl/wFAp6s
[15] https://goo.gl/8kEZnJ
[16] https://goo.gl/P6v3cx

24
[17] https://goo.gl/p2tiYp
Related Documents