Points, Vectors, Lines, Spheres and Matrices ©Anthony Steed 2001-2003

1 Points, Vectors, Lines, Spheres and Matrices ©Anthony Steed 2001-2003.
Mar 28, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Points, Vectors, Lines, Spheres and Matrices
©Anthony Steed 2001-2003

2
• Points• Vectors• Lines• Spheres• Matrices
• 3D transformations as matrices
• Homogenous co-ordinates
Overview
3
Basic Maths
In computer graphics we need mathematics both for describing our scenes and also for performing operations on them, such as projection and various transformations.
Coordinate systems (right- and left-handed), serve as a reference point.
3 axes labelled x, y, z at right angles.
4
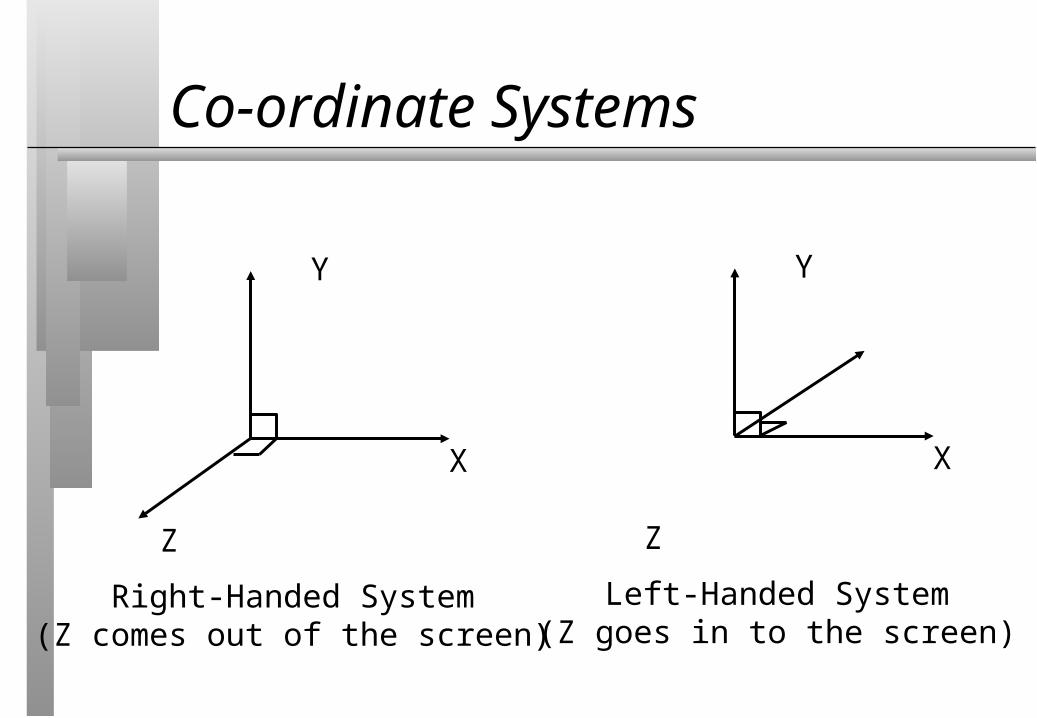
Co-ordinate Systems
X
Y
Z
Right-Handed System(Z comes out of the screen)
X
Y
Z
Left-Handed System(Z goes in to the screen)
5
Points, P (x, y, z)
Gives us a position in relation to the origin of our coordinate system

6
Vectors, V (x, y, z)
Represent a direction (and magnitude) in 3D space
Points != VectorsVector +Vector = VectorPoint – Point = VectorPoint + Vector = PointPoint + Point = ?

7
Vectors, V (x, y, z)
v
w
v + w
Vector additionsum v + w
v2v
(-1)v (1/2)V
Scalar multiplication of vectors (they remain parallel)
v
w
Vector differencev - w = v + (-w)
v
-w
v - w
x
y
Vector OP
P
O
8
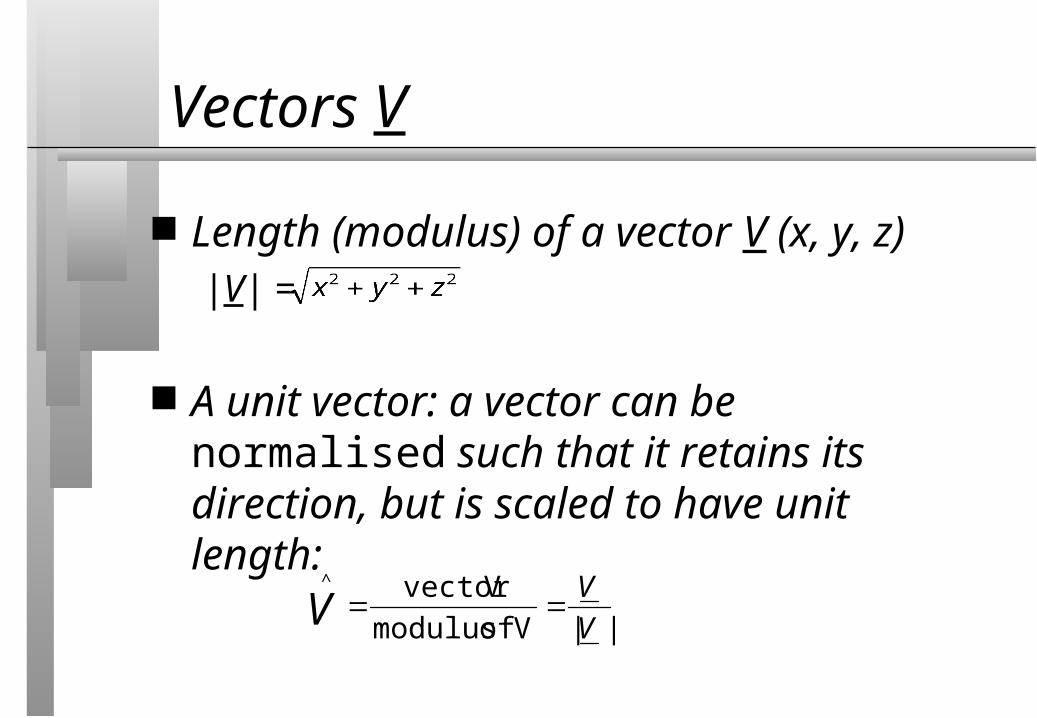
Vectors V
Length (modulus) of a vector V (x, y, z)|V| =
A unit vector: a vector can be normalised such that it retains its direction, but is scaled to have unit length: ||V of modulus
Vvector ^
V
VV
9
Dot Product
u · v = xu ·xv + yu ·yv + zu ·zv
u · v = |u| |v| coscos = u · v/ |u| |v|
This is purely a scalar number not a vector. What happens when the vectors are unit What does it mean if dot product == 0 or == 1?

10
Cross Product
The result is not a scalar but a vector which is normal to the plane of the other 2
Can be computed using the determinant of:
u x v = i(yvzu -zvyu), -j(xvzu - zvxu), k(xvyu - yvxu)
Size is u x v = |u||v|sin Cross product of vector with it self is null
uuu
vvv
zyx
zyx
kji
uuu
vvv
zyx
zyx
kji
uuu
vvv
zyx
zyx
kji
uuu
vvv
zyx
zyx
kji

11
Parametric equation of a line (ray)
Given two points P0 = (x0, y0, z0) and P1 = (x1, y1, z1) the line passing through them can be expressed as:
P(t) = P0 + t(P1 - P0)x(t) = x0 + t(x1 - x0)
y(t) = y0 + t(y1 - y0)
z(t) = z0 + t(z1 - z0)
=
With - < t <

12
Equation of a sphere
a
bchypotenuse
a2 + b2 = c2
P
xp
yp
(0, 0)
r
x2 + y2 = r2
Pythagoras Theorem:
Given a circle through the origin with radius r, then for any point P on it we have:
13
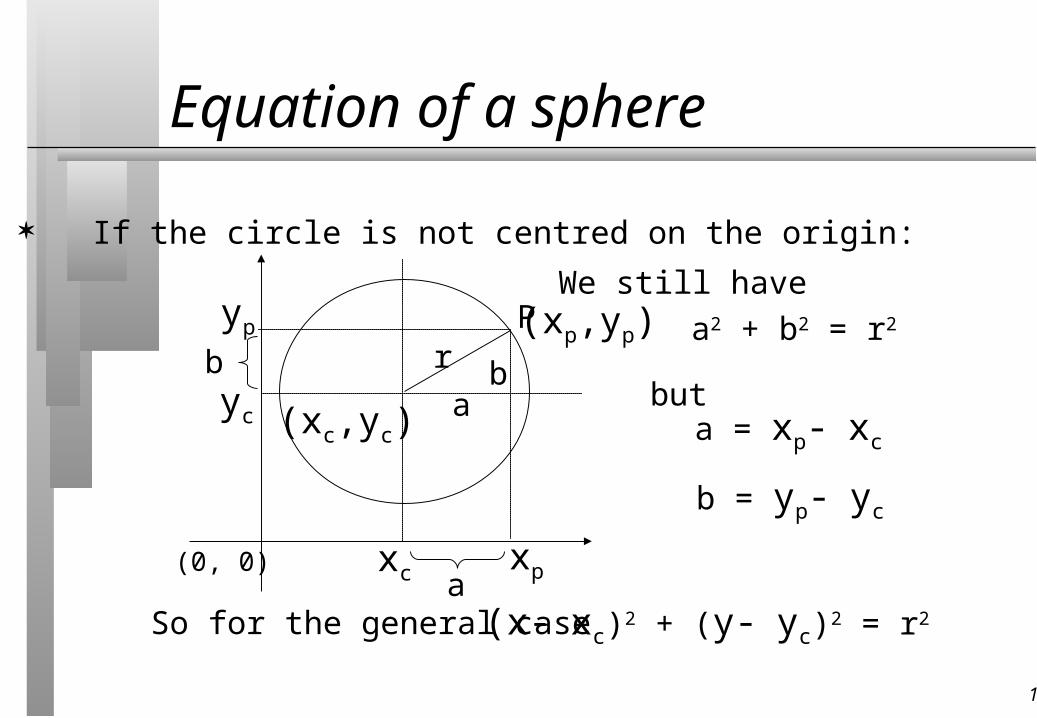
Equation of a sphere
If the circle is not centred on the origin:
(0, 0)
P
xp
yp
r
xc
yc ab
a
ba2 + b2 = r2
We still have
buta = xp- xc
b = yp- yc
So for the general case (x- xc)2 + (y- yc)
2 = r2
(xp,yp)
(xc,yc)

14
Equation of a sphere
Pythagoras theorem generalises to 3D giving
a2 + b2 + c2 = d2 Based on that we can easily
prove that the general equation of a sphere is:
(x- xc)2 + (y- yc)
2 + (z- zc)2 = r2
and at origin: x2 + y2 + z2 = r2

15
Matrix Math
©Anthony Steed 2001

16
Vectors and Matrices
Matrix is an array of numbers with dimensions M (rows) by N (columns)• 3 by 6 matrix• element 2,3
is (3)
Vector can be considered a 1 x M matrix•
zyxv
100025114311212003

17
Types of Matrix
Identity matrices - I
Diagonal
1001
1000010000100001
Symmetric
• Diagonal matrices are (of course) symmetric
• Identity matrices are (of course) diagonal
4000010000200001
fecedbcba
18
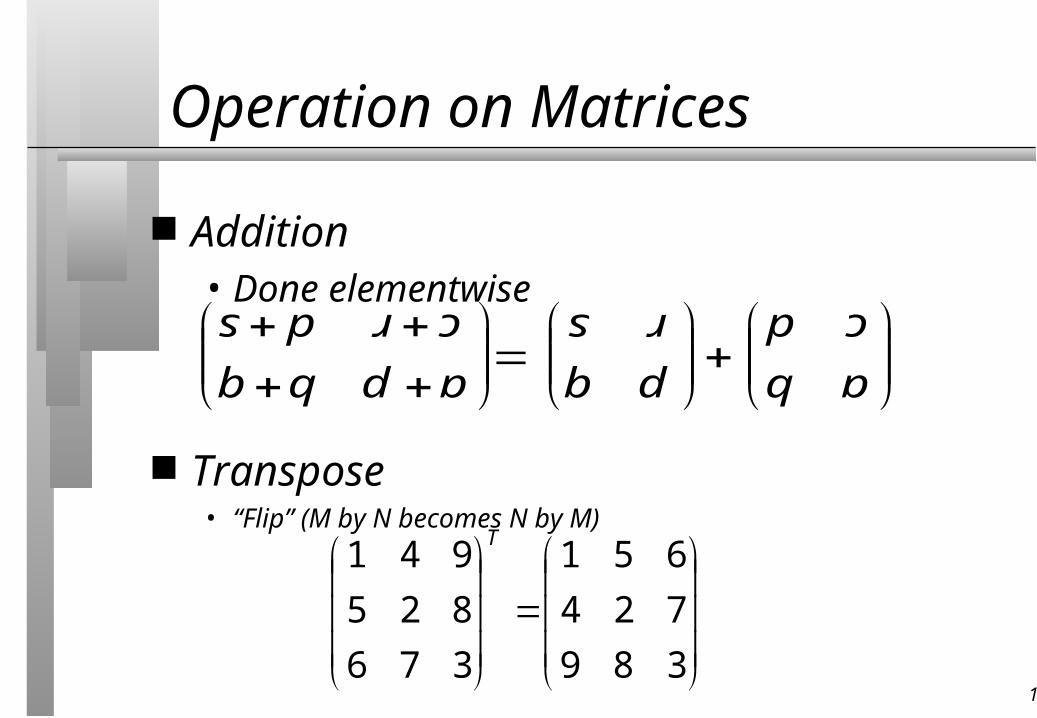
Operation on Matrices
Addition• Done elementwise
Transpose• “Flip” (M by N becomes N by M)
s d r c
q b p a
s r
q p
d c
b a
389
724
651
376
825
941T
19
Operations on Matrices
Multiplication• Only possible to multiply of dimensions
– x1 by y1 and x2 by y2 iff y1 = x2
• resulting matrix is x1 by y2
– e.g. Matrix A is 2 by 3 and Matrix by 3 by 4• resulting matrix is 2 by 4
– Just because A x B is possible doesn’t mean B x A is possible!

20
Matrix Multiplication Order
A is n by k , B is k by m C = A x B defined by
BxA not necessarily equal to AxB
k
l
ljilij bac1
*
*****
*****
*.
*.*.*.*.*.
*****
*...
*.*.*.*.*.
*****.....

21
Example Multiplications
____
____
1011
12
101132
__________________
010001100
111013322

22
Inverse
If A x B = I and B x A = I then
A = B-1 and B = A-1

23
3D Transforms
In 3-space vectors are transformed by 3 by 3 matrices
ziyfxczhyexbzgydxa
ihg
fed
cba
zyx

24
Scale
Scale uses a diagonal matrix
Scale by 2 along x and -2 along z
zcybxac
ba
zyx
000000
1046200
010002
543
25
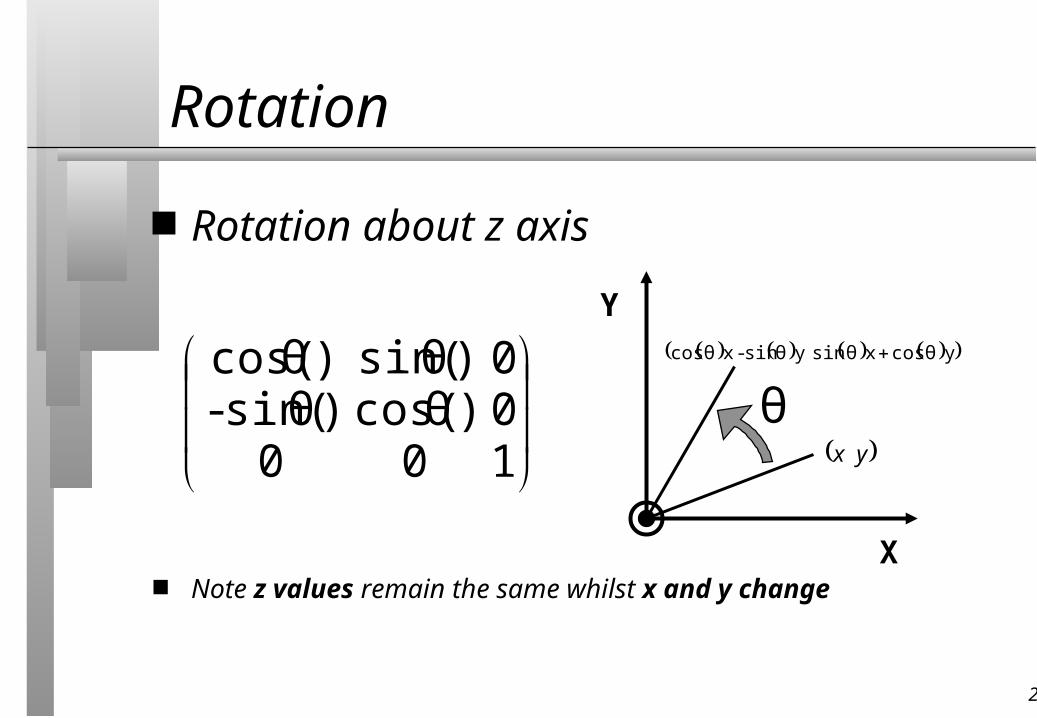
Rotation
Rotation about z axis
Note z values remain the same whilst x and y change
1000)θcos()θsin(-0)θsin()θcos(
Y
X
θ yx
yθ cosxθ sin yθ sin-xθ cos

26
Rotation X, Y and Scale
About X
About Y
Scale (should look familiar)
)θcos()θsin(-0
)θsin()θcos(0
001
)θcos(0)θsin(010
)θsin(-0)θcos(
cb
a
000000

27
Homogenous Points
Add 1D, but constrain that to be equal to 1 (x,y,z,1)
Homogeneity means that any point in 3-space can be represented by an infinite variety of homogenous 4D points• (2 3 4 1) = (4 6 8 2) = (3 4.5 6 1.5)
Why?• 4D allows as to include 3D translation in matrix
form

28
Homogenous Vectors
Vectors != Points Remember points can not be added If A and B are points A-B is a vector Vectors have form (x y z 0) Addition makes sense

29
Translation in Homogenous Form
Note that the homogenous component is preserved (* * * 1), and aside from the translation the matrix is I
1
1010000100001
1 czbyax
cba
zyx

30
Putting it Together
R is rotation and scale components T is translation component
TR
TTT
RRR
RRR
RRR
.
1
0
0
0
321
987
654
321
31
1432
1432010000100001
1
1432010000100001
1000001001000001
1
YZXYZXZYX
1442
1000011001000001
1442
1000001001000001
1432010000100001
1
YZXZYXZYX
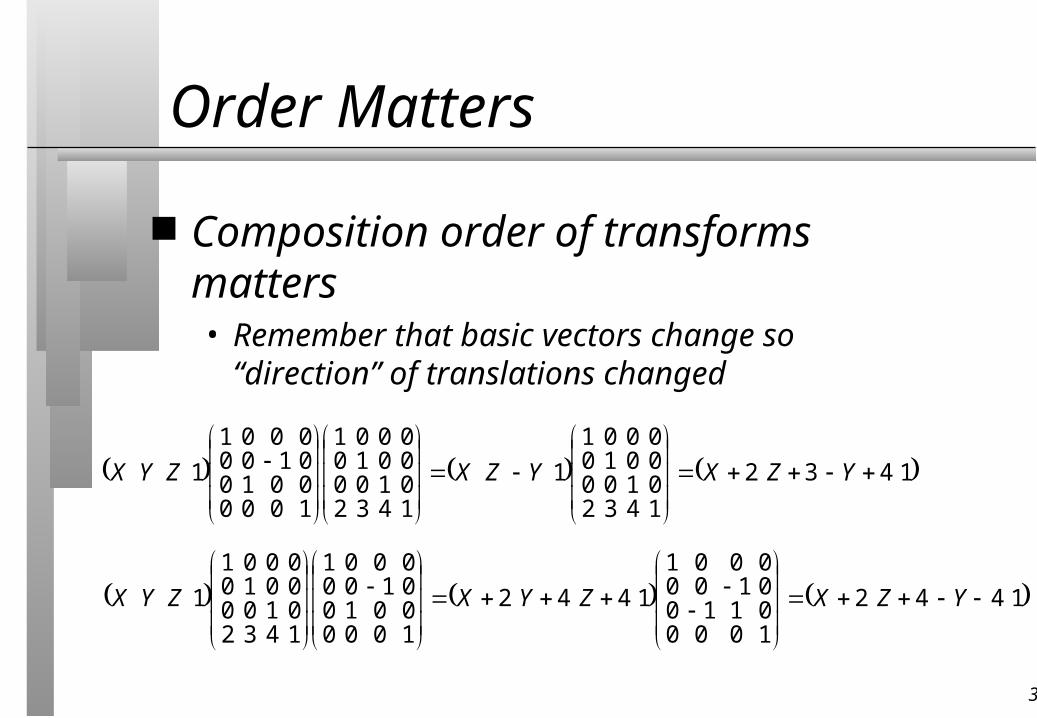
Order Matters
Composition order of transforms matters• Remember that basic vectors change so
“direction” of translations changed
32
Exercises
Calculate the following matrix: /2 about X then /2 about Y then /2 about Z (remember “then” means multiply on the right). What is a simpler form of this matrix?
Compose the following matrix: translate 2 along X, rotate /2 about Y, translate -2 along X. Draw a figure with a few points (you will only need 2D) and then its translation under this transformation.

33
Matrix Summary
Rotation, Scale, Translation Composition of transforms The homogenous form
Related Documents











