1 Pertemuan 17 Planning Matakuliah : T0264/Intelijensia Semu Tahun : Juli 2006 Versi : 2/1

1 Pertemuan 17 Planning Matakuliah: T0264/Intelijensia Semu Tahun: Juli 2006 Versi: 2/1.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
Pertemuan 17Planning
Matakuliah : T0264/Intelijensia Semu
Tahun : Juli 2006
Versi : 2/1
2
Learning Outcomes
Pada akhir pertemuan ini, diharapkan mahasiswa
akan mampu :
• << TIK-99 >>
• << TIK-99>>
3
Outline Materi
• Materi 1
• Materi 2
• Materi 3
• Materi 4
• Materi 5
4
13.1. Overview
• Often the problem that must be solved is divided into smaller pieces and to solve those pieces separately.
• The word Planning refers to the process of the computing several steps of the problem-solving procedure before executing any of them.
• This methods focus on way of decomposing the original problem into appropriate subparts and on way of recording and handling interactions among the subparts as they are detected during the problem-solving process.

5
Overview
• Decomposability
• Predictability
• Plan failures
• Planning vs. doing

6
Components of a Planning System
• Choose the best rule to apply next based on the best available heuristic information.
• Apply the chosen rule to compute the new problem state that arises from its application.
• Detect when a solution has been found.• Detect dead ends so that they can be
abandoned and the system’s effort directed in more fruitful directions.
• Detect when an almost correct solution has been found and employ special techniques to make it totally correct.
7
13.2. An Example Domain
The Blocks WorldOperators :• UNSTACK(A,B) Pick up block A from its current
position on block B. The arm must be empty and block A must have no blocks on top of it.
• STACK(A,B) Place block A on block B. The arm must already be holding A and the surface of B must be clear.
• PICKUP(A) Pick Up block A from the table and hold it. The arm must be empty and there must be nothing on top of block A.
• PUTDOWN(A) Put block A down on the table. The arm must have been holding block A.
8
The Blocks World
Predicates :• ON(A,B) Block A is on block B.• ONTABLE(A) Block A is on the table.• CLEAR(A) There is nothing on top of block A.• HOLDING(A) The arm is holding block A.• ARMEMPTY The arm is holding nothing.
Inference rules :• - x : HOLDING(x) ARMEMPTY• - x : ONTABLE(x) Y : y ON(x,y)• - x : y : ON(y,x) CLEAR(x)
9
The Blocks World
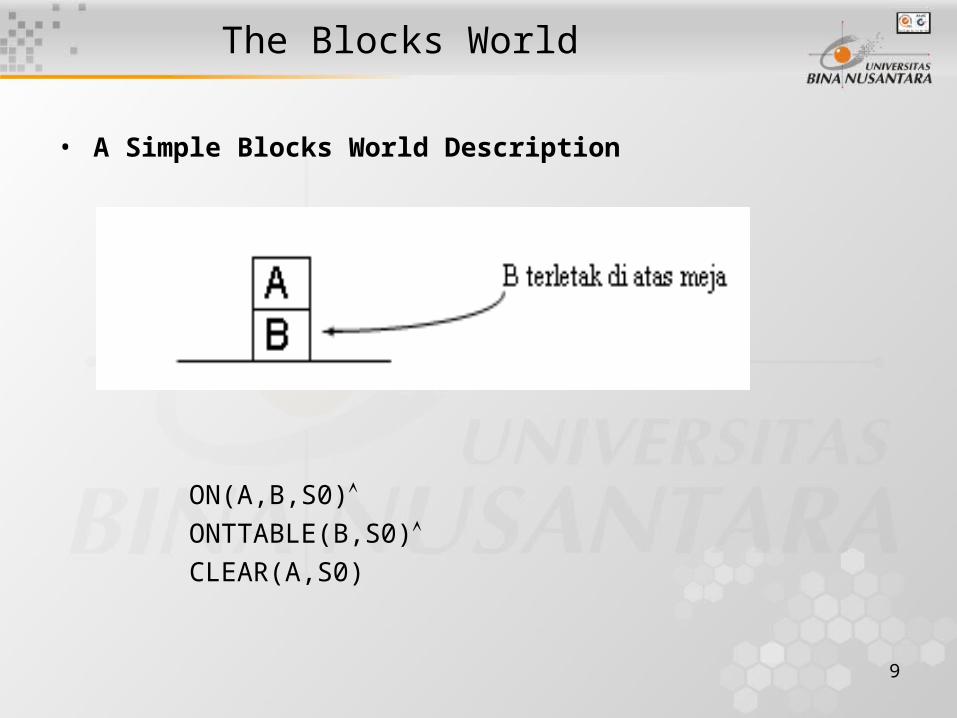
• A Simple Blocks World Description
ON(A,B,S0)ONTTABLE(B,S0)CLEAR(A,S0)
10
The Blocks World
• STRIPS-Style Operators for the Blocks World
STACK(x,y)P : CLEAR(y) HOLDING(x)D : CLEAR(y) HOLDING(x)A : ARMEMPTY ON(x,y)
UNSTACK(x,y)P : ON(x,y) CLEAR(x) ARMEMPTYD : ON(x,y) ARMEMPTYA : HOLDING(x) CLEAR(y)
PICKUP(x)P : CLEAR(x) ONTABLE(x) ARMEMPTYD : ONTABLE(x) ARMEMPTYA : HOLDING(x)
PUTDOWN(x)P : HOLDING(x)D : HOLDING(x)A : ONTABLE(x) ARMEMPTY

11
The Blocks World
We start with the situation shown and we would describe it as:
ON(A,B) ONTABLE(B) CLEAR(A)
After applying the operator UNSTACK(A,B), our description of the world would be :
ONTABLE(B) CLEAR(A) CLEAR(B) HOLDING(A)
A
B
12
The Blocks World
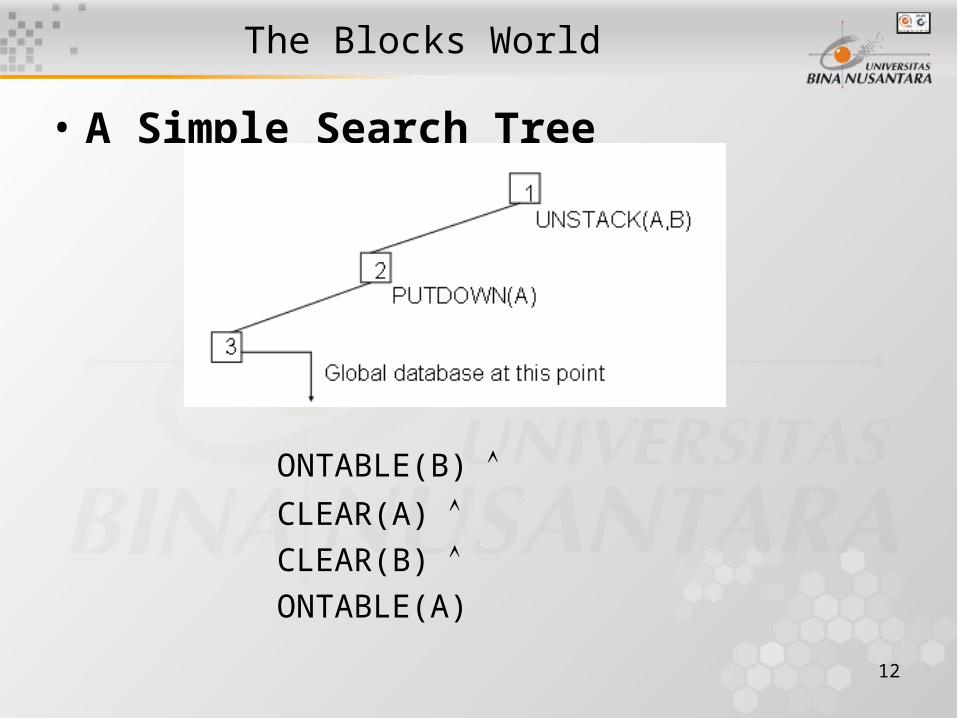
• A Simple Search Tree
ONTABLE(B) CLEAR(A) CLEAR(B) ONTABLE(A)
13
13.4. Goal Stack Planning
• Goal stack planning is one of the earliest techniques to be developed for solving compound goal that may interact was the use of a goal stack.
• This was the approach used by STRIPS.
• The problem solver makes use of a single stack that contains both goals and operator that have been proposed to satisfy those goals.
14
Goal Stack Planning
• The goal-stack planning method attacks problem involving conjoined goal by solving the goal one at a time, in order.
• A plan generated by this method contains a sequence of operators of operator for attaining the first goal, followed by a complete sequence for the second goal, etc.
15
Goal Stack Planning
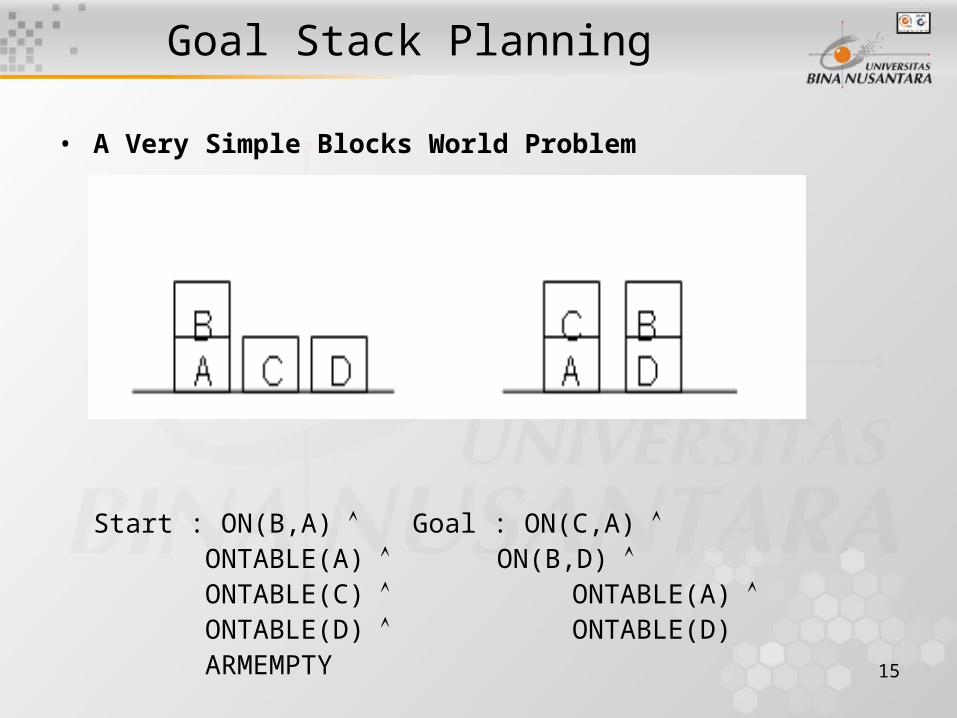
• A Very Simple Blocks World Problem
Start : ON(B,A) Goal : ON(C,A) ONTABLE(A) ON(B,D) ONTABLE(C) ONTABLE(A) ONTABLE(D) ONTABLE(D) ARMEMPTY

16
Goal Stack Planning
• Initial goal stack :
ON(C,A) ON(B,D) ONTABLE(A) ONTABLE(D)
• Choose to work on ON(C,A) before ON(B,D) :
ON(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD
• Achieve ON(C,A) with STACK(C,A) :
STACK(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD
17
Goal Stack Planning
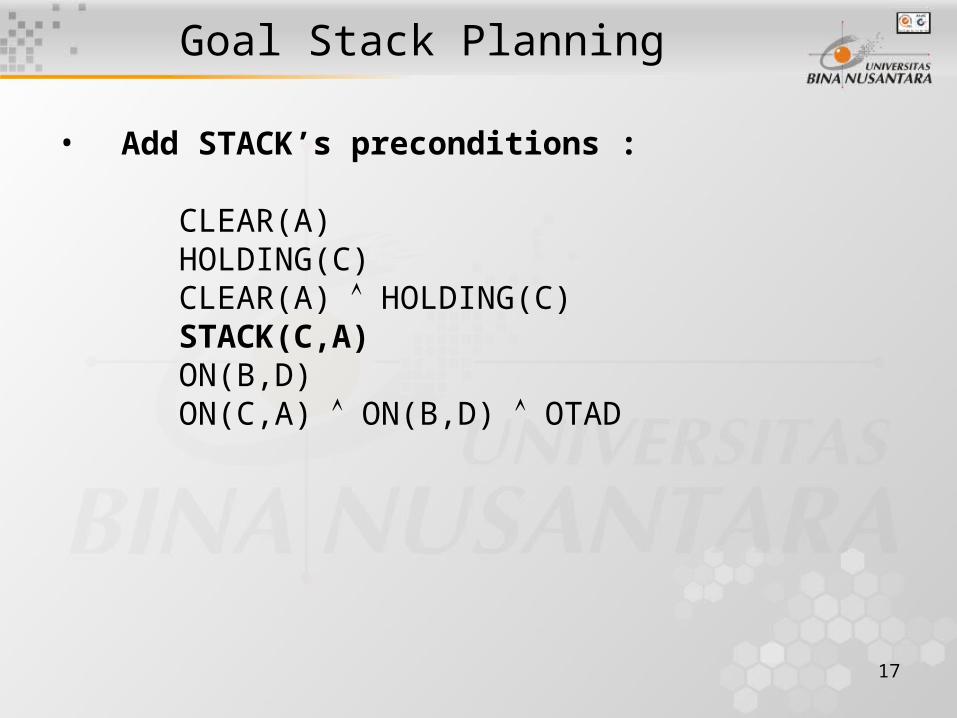
• Add STACK’s preconditions :
CLEAR(A) HOLDING(C) CLEAR(A) HOLDING(C) STACK(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD

18
Goal Stack Planning
• Achieve CLEAR(A) with UNSTACK(B,A) :
ON(B,A) CLEAR(B) ARMEMPTY ON(B,A) CLEAR(B) ARMEMPTY UNSTACK(B,A) HOLDING(C) CLEAR(A) HOLDING(C) STACK(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD

19
Goal Stack Planning
• Now the top element of the stack is the operator UNSTACK(B,A).
• Now guaranteed that its preconditions are satisfied, so it can be applied to produce a new world model from which the rest of the problem-solving process can continue.
• Meanwhile we record that UNSTACK(B,A) is the first operator of proposed solution sequence.
• At this point, the database corresponding to the world model is :
• ONTABLE(A) ONTABLE(C) ONTABLE(D) HOLDING(B) CLEAR(A)

20
Goal Stack Planning
• The goal stack now is :
HOLDING(C)
CLEAR(A) HOLDING(C)
STACK(C,A)
ON(B,D)
ON(C,A) ON(B,D) OTAD
21
Goal Stack Planning
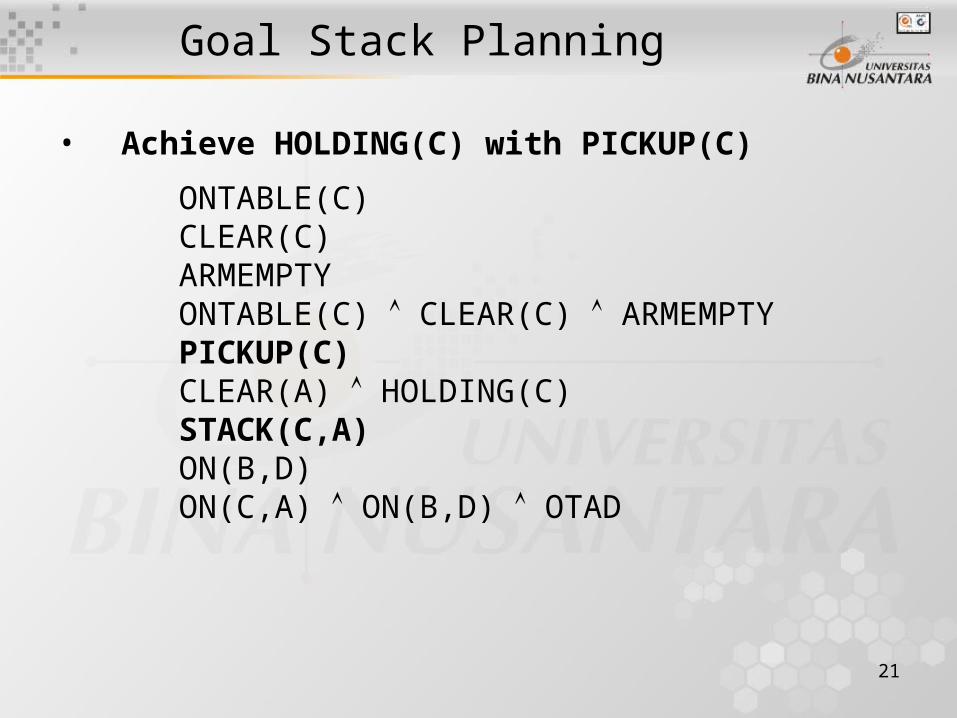
• Achieve HOLDING(C) with PICKUP(C)
ONTABLE(C) CLEAR(C) ARMEMPTY ONTABLE(C) CLEAR(C) ARMEMPTY PICKUP(C) CLEAR(A) HOLDING(C) STACK(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD
22
Goal Stack Planning
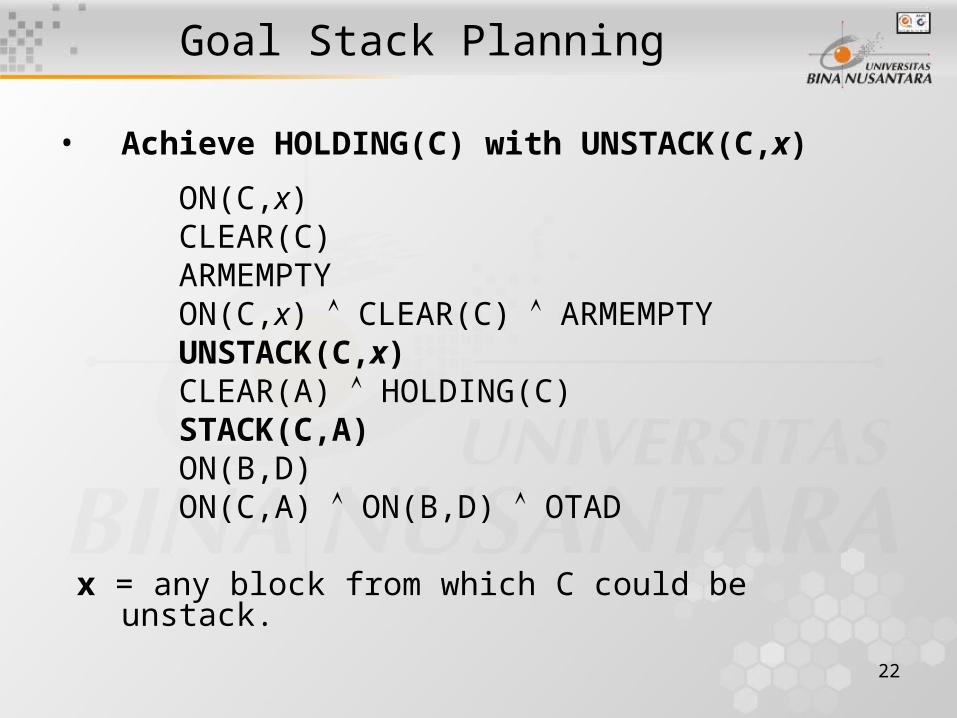
• Achieve HOLDING(C) with UNSTACK(C,x)
ON(C,x) CLEAR(C) ARMEMPTY ON(C,x) CLEAR(C) ARMEMPTY UNSTACK(C,x) CLEAR(A) HOLDING(C) STACK(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD
x = any block from which C could be unstack.

23
Goal Stack Planning
• Achieve ON(C,x) by STACK(C,x) :
CLEAR(x) HOLDING(C) CLEAR(x) HOLDING(C) STACK(C,x) CLEAR(C) ARMEMPTY ON(C,x) CLEAR(C) ARMEMPTY UNSTACK(C,x) CLEAR(A) HOLDING(C) STACK(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD
24
Goal Stack Planning
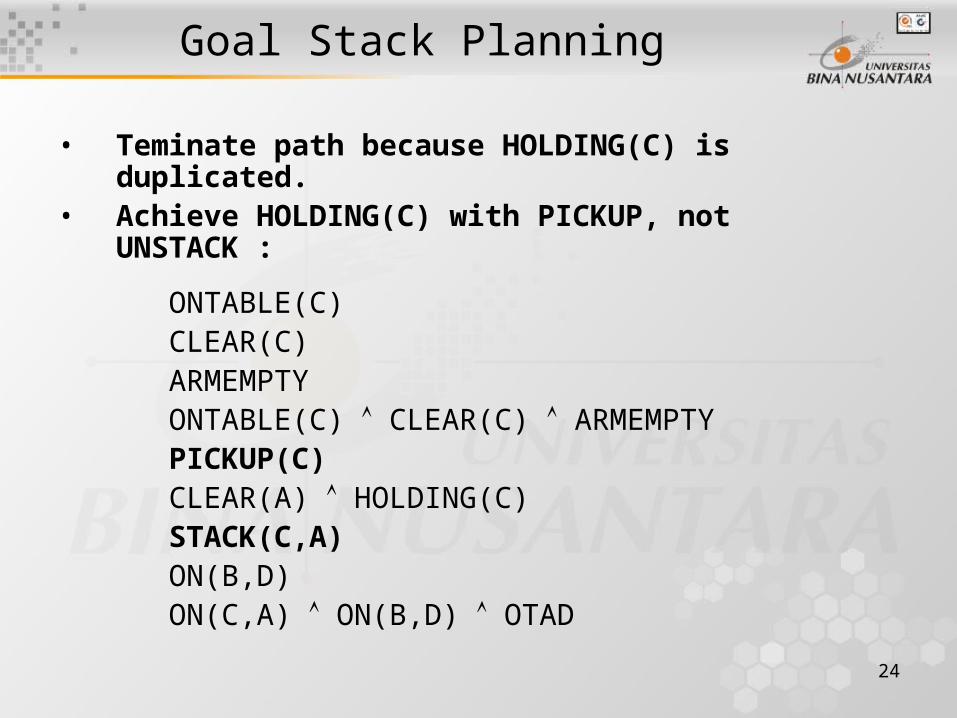
• Teminate path because HOLDING(C) is duplicated.• Achieve HOLDING(C) with PICKUP, not UNSTACK :
ONTABLE(C) CLEAR(C) ARMEMPTY ONTABLE(C) CLEAR(C) ARMEMPTY PICKUP(C) CLEAR(A) HOLDING(C) STACK(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD

25
Goal Stack Planning
• Pop ONTABLE(C) and CLEAR(C), and achieve ARMEMPTY by STACK(B,D) :
CLEAR(D) HOLDING(B) CLEAR(D) HOLDING(B) STACK(B,D) ONTABLE(C) CLEAR(C) ARMEMPTY PICKUP(C) CLEAR(A) HOLDING(C) STACK(C,A) ON(B,D) ON(C,A) ON(B,D) OTAD
26
Goal Stack Planning
• Pop entire stack, and return plan :
1. UNSTACK(B,A)
2. STACK(B,D)
3. PICKUP(C)
4. STACK(C,A)
27
<<Closing >>
End of Pertemuan 17
Good Luck
Related Documents











