1 Last lecture Path planning for a moving Visibility graph Cell decomposition Potential field Geometric preliminaries Implementing geometric primitives correctly and efficiently is tricky and requires careful thought.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Last lecture Path planning for a moving
Visibility graph Cell decomposition Potential field
Geometric preliminariesImplementing geometric primitives correctly and efficiently is tricky and requires careful thought.

NUS CS 5247 David Hsu
Configuration SpaceConfiguration Space

3
What is a path?

4
Rough idea Convert rigid robots, articulated robots, etc. into
points Apply algorithms for moving points

5
Mapping from the workspace to the configuration space
workspace configuration space

6
Configuration space Definitions and examples Obstacles Paths Metrics

7
Configuration space The configuration of a moving
object is a specification of the position of every point on the object. Usually a configuration is expressed
as a vector of position & orientation parameters: q = (q1, q2,…,qn).
The configuration space C is the set of all possible configurations. A configuration is a point in C.
q=(q1, q2,…,qn)
qq11
qq22
qq33
qqnn

8
C = S1 x S1
Topology of the configuration pace The topology of C is usually not that of a Cartesian
space Rn.
0 2
2

9
Dimension of configuration space The dimension of a configuration space is the
minimum number of parameters needed to specify the configuration of the object completely.
It is also called the number of degrees of freedom (dofs) of a moving object.

10
Example: rigid robot in 2-D workspace
3-parameter specification: q = (x, y, ) with [0, 2). 3-D configuration space
robot
workspace
reference point
x
y
reference direction

11
Example: rigid robot in 2-D workspace 4-parameter specification: q = (x, y, u, v) with
u2+v2 = 1. Note u = cosandvsin .
dim of configuration space = ??? Does the dimension of the configuration space
(number of dofs) depend on the parametrization? Topology: a 3-D cylinder C = R2 x S1
Does the topology depend on the parametrization?
3
x
12
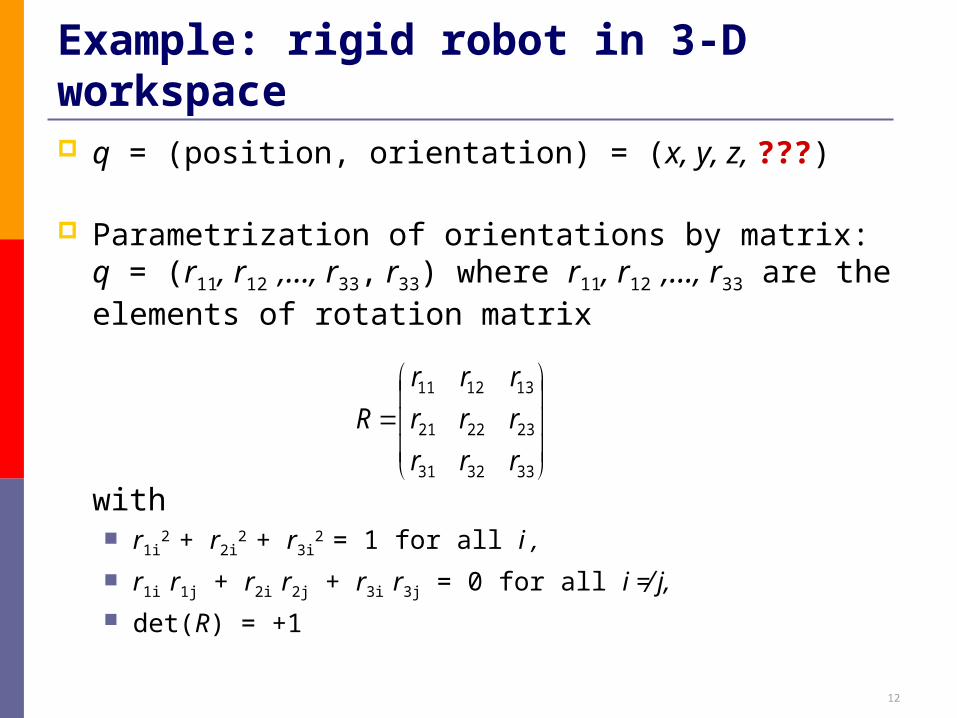
Example: rigid robot in 3-D workspace q = (position, orientation) = (x, y, z, ???)
Parametrization of orientations by matrix: q = (r11, r12 ,…, r33, r33) where r11, r12 ,…, r33 are the elements of rotation matrix
with r1i
2 + r2i2 + r3i
2 = 1 for all i ,
r1i r1j + r2i r2j + r3i r3j = 0 for all i ≠ j,
det(R) = +1
333231
232221
131211
rrr
rrr
rrr
R

13
Example: rigid robot in 3-D workspace Parametrization of orientations by Euler angles:
xx
y
zz
xxyy
zz
x
y
z
xx
yy
zz
1 2 3 4

14
Parametrization of orientations by unit quaternion: u = (u1, u2, u3, u4) with u1
2 + u2
2 + u32 + u4
2 = 1. Note (u1, u2, u3, u4) =
(cos/2, nxsin/2, nysin/2, nzsin/2) with nx
2 + ny
2+ nz2 = 1.
Compare with representation of orientation in 2-D:(u1,u2) = (cossin)
Example: rigid robot in 3-D workspace
n = (nx, ny, nz)

15
Example: rigid robot in 3-D workspace Advantage of unit quaternion representation
Compact No singularity Naturally reflect the topology of the space of
orientations
Number of dofs = 6 Topology: R3 x SO(3)

16
Example: articulated robot
q = (q1,q2,…,q2n)
Number of dofs = 2n What is the topology?
qq11
qq22
An articulated object is a set of rigid bodies connected at the joints.

17
Example: protein backbone What are the possible
representations? What is the number of
dofs? What is the topology?

18
Configuration space Definitions and examples Obstacles Paths Metrics

19
Obstacles in the configuration space A configuration q is collision-free, or free, if a
moving object placed at q does not intersect any obstacles in the workspace.
The free space F is the set of free configurations. A configuration space obstacle (C-obstacle) is
the set of configurations where the moving object collides with workspace obstacles.

20
Disc in 2-D workspace
workspace configuration space
workspace

21
Polygonal robot translating in 2-D workspace
workspace configuration space

22
Polygonal robot translating & rotating in 2-D workspace
workspace configuration space

23
Polygonal robot translating & rotating in 2-D workspace
x
y

24
Articulated robot in 2-D workspace
workspace configuration space

25
Configuration space Definitions and examples Obstacles Paths Metrics

26
Paths in the configuration space
A path in C is a continuous curve connecting two configurations q and q’ :
such that q and q’.
workspace configuration space
Css )(]1,0[:

27
Constraints on paths
A trajectory is a path parameterized by time:
Constraints Finite length Bounded curvature Smoothness Minimum length Minimum time Minimum energy …
CtTt )(],0[:
28
Free space topology A free path lies entirely in the free space F. The moving object and the obstacles are
modeled as closed subsets, meaning that they contain their boundaries.
One can show that the C-obstacles are closed subsets of the configuration space C as well.
Consequently, the free space F is an open subset of C. Hence, each free configuration is the center of a ball of non-zero radius entirely contained in F.

29
Semi-free space A configuration q is semi-free if the moving
object placed q touches the boundary, but not the interior of obstacles. Free, or In contact
The semi-free space is a closed subset of C. Its boundary is a superset of the boundary of F.

30
Example

31
Example

32
Two paths and ’with the same endpoints are homotopic if one can be continuously deformed into the other:
with h(s,0) = (s) and h(s,1) = ’(s).
A homotopic class of pathscontains all paths that arehomotopic to one another.
Homotopic paths
Fh ]1,0[]1,0[:

33
Connectedness of C-Space C is connected if every two configurations can
be connected by a path. C is simply-connected if any two paths
connecting the same endpoints are homotopic.Examples: R2 or R3
Otherwise C is multiply-connected.Examples: S1 and SO(3) are multiply- connected: In S1, infinite number of homotopy classes In SO(3), only two homotopy classes

34
Configuration space Definitions and examples Obstacles Paths Metrics

35
Metric in configuration space A metric or distance function d in a configuration
space C is a function
such that d(q, q’) = 0 if and only if q = q’, d(q, q’) = d(q’, q), .
0)',()',(: 2 qqdCqqd
)',"()",()',( qqdqqdqqd

36
Example Robot A and a point x on A x(q): position of x in the workspace when A is at
configuration q A distance d in C is defined by
d(q, q’) = maxxA || x(q) x(q’) ||
where ||x - y|| denotes the Euclidean distance between points x and y in the workspace.
q q’
37
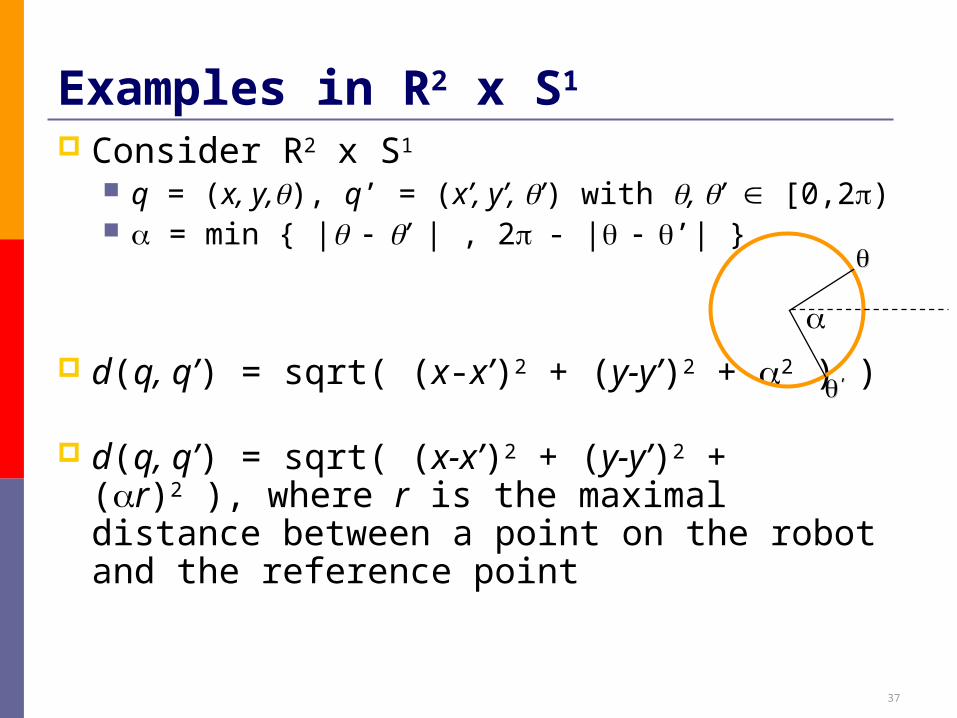
Examples in R2 x S1
Consider R2 x S1
q = (x, y,), q’ = (x’, y’, ’) with , ’ [0,2) = min { |’| , 2- |’| }
d(q, q’) = sqrt( (x-x’)2 + (y-y’)2 + 2 ) )
d(q, q’) = sqrt( (x-x’)2 + (y-y’)2 + (r)2 ), where r is the maximal distance between a point on the robot and the reference point
’’

38
Summary on configuration space Parametrization Dimension (dofs) Topology Metric

NUS CS 5247 David Hsu
Minkowski SumMinkowski Sum

40
Problem Input:
Polygonal moving object translating in 2-D workspace Polygonal obstacles
Output: configuration space obstacles represented as polygons

41
Disc in 2-D workspace
workspace configuration space
workspace

42
Minkowski sum The Minkowski sum of two sets P and Q,
denoted by PQ, is defined as P+Q = { p+q | p P, qQ }
Similarly, the Minkowski difference is defined as
P – Q = { p–q | pP, qQ }
p
q

43
Minkowski sum of convex polygons The Minkowski sum of two convex polygons P
and Q of m and n vertices respectively is a convex polygon P + Q of m + n vertices. The vertices of P + Q are the “sums” of vertices of P
and Q.

44
Observation If P is an obstacle in the workspace and M is a
moving object. Then the C-space obstacle corresponding to P is P – M.
P
M
O
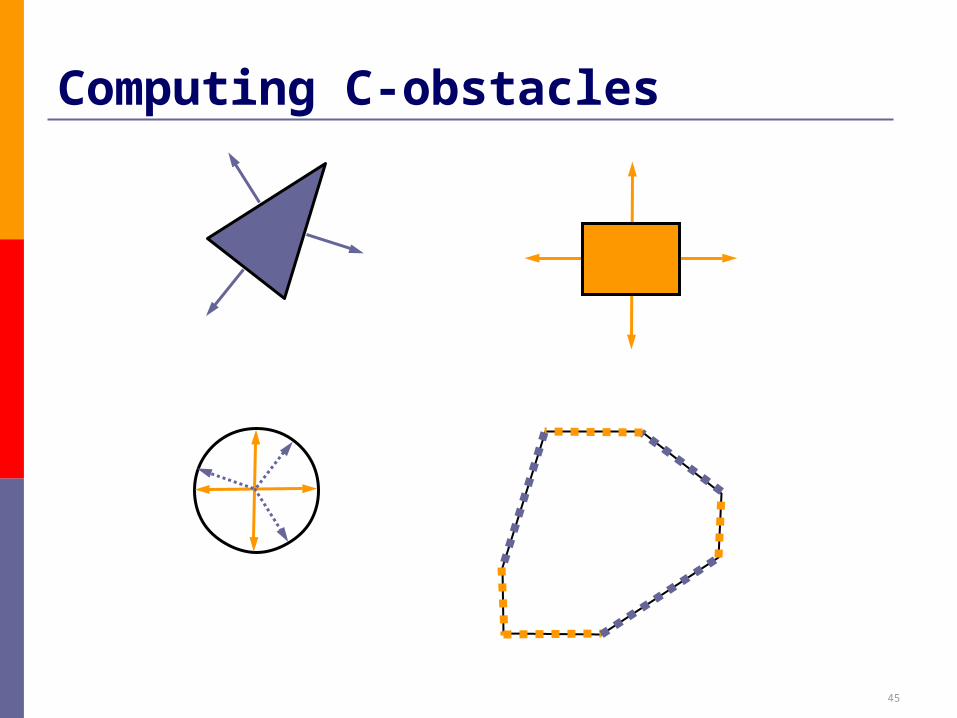
45
Computing C-obstacles

46
Computational efficiency Running time O(n+m) Space O(n+m) Non-convex obstacles
Decompose into convex polygons (e.g., triangles or trapezoids), compute the Minkowski sums, and take the union
Complexity of Minkowksi sum O(n2m2)
3-D workspace
Related Documents