Un espacio hiperconexo con muchos subespacios Rafael Isaacs Homenaje a Carlos Ruiz Salguero Universidad Industrial de Santander January 24, 2013 Rafael Isaacs El espacio de los discursos

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Un espacio hiperconexo con muchos subespacios
Rafael IsaacsHomenaje a Carlos Ruiz Salguero
Universidad Industrial de Santander
January 24, 2013
Rafael Isaacs El espacio de los discursos

Palabras, codigos y bicodigos
Definicion
2∗ son las palabras (o cadenas) sobre el alfabeto {0, 1}. Masformalmente 2∗ =
⋃∞k=0 2
k donde 2k son las palabras de k letras y20 = {λ} siendo λ la palabra sin letras.2+ = 2∗ − {λ}
Definicion
2Z es el conjunto de funciones f : Z −→ 2 = {0, 1} 2Z con latopologıa producto (tomando 2 con la topologıa discreta) es unade tantas representaciones del famoso y muy importante espaciode Cantor. Hay muchas formas de dar una base a este espacio.Sea f : A −→ 2 una funcion definida sobre A que es unsubconjunto finito de Z, definimos [f ] como el conjunto de todaslas funciones que amplıan f a Z es decir:
[f ] = {g : Z −→ 2| g ⇃A= f }
El conjunto de todas las [f ] forma una base (de abiertos cerrados)Rafael Isaacs El espacio de los discursos

Palabras, codigos y bicodigos
Definicion
2∗ son las palabras (o cadenas) sobre el alfabeto {0, 1}. Masformalmente 2∗ =
⋃∞k=0 2
k donde 2k son las palabras de k letras y20 = {λ} siendo λ la palabra sin letras.2+ = 2∗ − {λ}
Definicion
2Z es el conjunto de funciones f : Z −→ 2 = {0, 1} 2Z con latopologıa producto (tomando 2 con la topologıa discreta) es unade tantas representaciones del famoso y muy importante espaciode Cantor. Hay muchas formas de dar una base a este espacio.Sea f : A −→ 2 una funcion definida sobre A que es unsubconjunto finito de Z, definimos [f ] como el conjunto de todaslas funciones que amplıan f a Z es decir:
[f ] = {g : Z −→ 2| g ⇃A= f }
El conjunto de todas las [f ] forma una base (de abiertos cerrados)Rafael Isaacs El espacio de los discursos

El espacio de los discursos
Definicion
El espacio de los discursos X es el espacio cociente 2Z/ ∼ dondef ∼ g si y solo si existe k ∈ Z tal que para todo z ∈ Z, se tienef (z) = g(z + k).
Los elementos de X, que llamaremos discursos, se deben ver comosucesiones que se extienden indefinidamente tanto a derecha comoa izquierda, sin interesar donde inician. Cada p ∈ X es un conjuntode funciones f ∈ 2Z cada una de ellas es re-presentante de p; quef ∈ p significa que la clase de equivalencia de f es p.
Rafael Isaacs El espacio de los discursos

Un discurso
Ejemplo
f ∼ g cuando f (z) = 1 sisi z es impar g = 1− f y por lo tantorepresentan el mismo elemento de X que notaremos01 = 0101 = 01010.
01
10
••
•
•
01
0
1
0
1••
• •
• •0
1•
•
Rafael Isaacs El espacio de los discursos

Otros discursos
Ejemplo
Notense las siguientes igualdades:
00 11 01 =(∏0
i=−∞ 0)1 10 = (
0∏
i=−∞
0) 1
∞∏
i=1
10
(∞∏
i=−∞
10
)=
(∏∞i=−∞ 0101
)
00
∞∏
i=0
01i0 = 0∏∞
i=0 001i
Rafael Isaacs El espacio de los discursos

La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos

La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos

La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos

La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos

La topologıa de X
Definicion
Dada una palabra w ∈ 2∗ digamos w = x1x2 . . . xn decimos que westa en p ∈ X si para todo f ∈ p existe k tal quef (k) = x1; f (k + 1) = x2; . . . ; f (k + n − 1) = xn. Se notara w ⊳ p.
< w >= {p ∈ X| w ⊳ p}
Proposicion
|X| = 2ℵ0 . Ademas, se cumple:
1 X es compacto.
2 Los conjuntos < w > forman una base de X .
3 X es 1-enumerable y 2-enumerable.
4 X es hiperconexo.
5 Cualquier abierto no vacıo es denso en X.
6 Hay elementos (los angeles) que estan en cualquier abierto.
Rafael Isaacs El espacio de los discursos
Ejemplos de abiertos en X
Ejemplo
Un abierto que no es basico: < 10 > ∪ < 01 >= X−{0, 1}.
Ejemplo
Todo abierto que contiene a 0 contiene a 01 mientras que < 01 >es una abierto que contiene a 01 pero que no contiene 0. Por
tanto la topologıa que hereda{0, 01
}es la de Sierpinski donde los
unicos abiertos son: {0, 01
},{01}, ∅
Ejemplo
Sean p = 0, , q = 01, r = 10 y s =∏
i∈Z(0|i |+11|i |+1); en la
topologıa que hereda {p, q, r , s} los abiertos son exactamente:
∅, {p, q, r , s}, {q, r , s}, {q, s}, {r , s}{s},Rafael Isaacs El espacio de los discursos

Ejemplos de abiertos en X
Ejemplo
Un abierto que no es basico: < 10 > ∪ < 01 >= X−{0, 1}.
Ejemplo
Todo abierto que contiene a 0 contiene a 01 mientras que < 01 >es una abierto que contiene a 01 pero que no contiene 0. Por
tanto la topologıa que hereda{0, 01
}es la de Sierpinski donde los
unicos abiertos son: {0, 01
},{01}, ∅
Ejemplo
Sean p = 0, , q = 01, r = 10 y s =∏
i∈Z(0|i |+11|i |+1); en la
topologıa que hereda {p, q, r , s} los abiertos son exactamente:
∅, {p, q, r , s}, {q, r , s}, {q, s}, {r , s}{s},Rafael Isaacs El espacio de los discursos

Ejemplos de abiertos en X
Ejemplo
Un abierto que no es basico: < 10 > ∪ < 01 >= X−{0, 1}.
Ejemplo
Todo abierto que contiene a 0 contiene a 01 mientras que < 01 >es una abierto que contiene a 01 pero que no contiene 0. Por
tanto la topologıa que hereda{0, 01
}es la de Sierpinski donde los
unicos abiertos son: {0, 01
},{01}, ∅
Ejemplo
Sean p = 0, , q = 01, r = 10 y s =∏
i∈Z(0|i |+11|i |+1); en la
topologıa que hereda {p, q, r , s} los abiertos son exactamente:
∅, {p, q, r , s}, {q, r , s}, {q, s}, {r , s}{s},Rafael Isaacs El espacio de los discursos

Ejemplos de abiertos en X
Ejemplo
El conjunto de los discursos de la forma 10n1 para n ∈ N forma unconjunto infinito de discursos cuya topologıa es la discreta puescada abierto basico < 10n1 > contiene unicamente a un discursode estos.
Ejemplo
U =< 101 > ∪ < 1001 > ∪ < 10001 > ∪ . . . es un abierto que noes union finita de basicos y que no es compacto. El complemento
de U es el conjunto{01i0
}i∈N
∪{0, 1, 10, 01
}aquellos p ∈ X en
cuyas representaciones no se encuentran dos 1’s separados porceros, es decir todos los 1’s van en bloque.
Rafael Isaacs El espacio de los discursos
Ejemplos de abiertos en X
Ejemplo
El conjunto de los discursos de la forma 10n1 para n ∈ N forma unconjunto infinito de discursos cuya topologıa es la discreta puescada abierto basico < 10n1 > contiene unicamente a un discursode estos.
Ejemplo
U =< 101 > ∪ < 1001 > ∪ < 10001 > ∪ . . . es un abierto que noes union finita de basicos y que no es compacto. El complemento
de U es el conjunto{01i0
}i∈N
∪{0, 1, 10, 01
}aquellos p ∈ X en
cuyas representaciones no se encuentran dos 1’s separados porceros, es decir todos los 1’s van en bloque.
Rafael Isaacs El espacio de los discursos

Ejemplos de abiertos en X
Ejemplo
< 1 >= X−{0}
< 01 >= X−{0, 1, 10
}
< 11 > ∪ < 00 >= X−{01}
Rafael Isaacs El espacio de los discursos
Dinamicas en X
Definicion
Una 2-dinamica G es una pareja G =< V ,E > donde V es unconjunto cuyos elementos son los denominados vertices y
E ⊆ (V × V × 2)
y sus elementos son denominadas aristas (etiquetadas con 0 o 1).Si a = (v1, v2, x) ∈ E esto significa que a es una arista que va dev1 a v2 y esta etiquetada con x ∈ 2 .La 2-dinamica es finita si el conjunto de vertices es finito.GF la 2-dinamica final sera la 2-dinamica con un unico vertice v0 ydos arcos: (v0, v0, 0) y (v0, v0, 1).
Rafael Isaacs El espacio de los discursos

Dinamicas en X
Las 2-dinamicas nos sirven para describir ciertos subconjuntos dediscursos de X. Cada camino define una palabra en 2∗. De igualforma al considerar caminos infinitos, que no empiezan niterminan, les podemos asociar discursos de X.
Ejemplo
El siguiente grafo representa a{10110, 10, 0
}.
0
1
1 1
0
0•
• • •
•
Rafael Isaacs El espacio de los discursos

Morfismos
Definicion
Si G = (V ,E ) y G ′ = (V ′,E ′) son 2-dinamicas diremos queΓ : V −→ V ′ es un morfismo si se cumple para todo vi , v2 ∈ V :
(v1, v2, x) ∈ E ⇒ (Γ(v1), Γ(v2), x) ∈ E ′
.Si Γ es ademas biyeccion y Γ−1 tambien es morfismo, entonces Γes un isomorfismo y G y G ′ son isomorfos.
Rafael Isaacs El espacio de los discursos

Ejemplos de Morfismos
Ejemplo
Sea w ∈ 2∗ una palabra de n letras, digamos w = x1 . . . xn,entonces definimos la 2 dinamica Gw = (V ,R) dondeV = {0, . . . , n} y R = {(i − 1, i , xi )}i = 1, . . . n. Ası las palabrasde 2∗ corresponden a las 2- dinamicas cuyos grafos asociados sonlineales. Gw no es conexa.
Definicion
Si f ∈ 2Z definimos Gf = (Z,Ef ) dondeEf = {(n, n + 1, f (n))}n∈Z.
Proposicion
Sean f , g ∈ 2Z entonces Gf es isomorfo a Gg , si y solo si, f ∼ g.Es mas, cualquier morfismo entre Gf y Gg es un isomorfismo.
Rafael Isaacs El espacio de los discursos
Ejemplos de Morfismos
Ejemplo
Sea w ∈ 2∗ una palabra de n letras, digamos w = x1 . . . xn,entonces definimos la 2 dinamica Gw = (V ,R) dondeV = {0, . . . , n} y R = {(i − 1, i , xi )}i = 1, . . . n. Ası las palabrasde 2∗ corresponden a las 2- dinamicas cuyos grafos asociados sonlineales. Gw no es conexa.
Definicion
Si f ∈ 2Z definimos Gf = (Z,Ef ) dondeEf = {(n, n + 1, f (n))}n∈Z.
Proposicion
Sean f , g ∈ 2Z entonces Gf es isomorfo a Gg , si y solo si, f ∼ g.Es mas, cualquier morfismo entre Gf y Gg es un isomorfismo.
Rafael Isaacs El espacio de los discursos

Ejemplos de Morfismos
Ejemplo
Sea w ∈ 2∗ una palabra de n letras, digamos w = x1 . . . xn,entonces definimos la 2 dinamica Gw = (V ,R) dondeV = {0, . . . , n} y R = {(i − 1, i , xi )}i = 1, . . . n. Ası las palabrasde 2∗ corresponden a las 2- dinamicas cuyos grafos asociados sonlineales. Gw no es conexa.
Definicion
Si f ∈ 2Z definimos Gf = (Z,Ef ) dondeEf = {(n, n + 1, f (n))}n∈Z.
Proposicion
Sean f , g ∈ 2Z entonces Gf es isomorfo a Gg , si y solo si, f ∼ g.Es mas, cualquier morfismo entre Gf y Gg es un isomorfismo.
Rafael Isaacs El espacio de los discursos

Regiones
Definicion
Dada una 2-dinamica G y un discurso en p ∈ X decimos quep ∈ L(G ) si existe un morfismo Γ : Gp −→ G.
Ejemplo
L(Gp) = {p} para todo p ∈ X.
Definicion
Una region de X es cualquier conjunto de la forma L(G ) donde Ges una 2-dinamica finita.
Rafael Isaacs El espacio de los discursos
Regiones
Definicion
Dada una 2-dinamica G y un discurso en p ∈ X decimos quep ∈ L(G ) si existe un morfismo Γ : Gp −→ G.
Ejemplo
L(Gp) = {p} para todo p ∈ X.
Definicion
Una region de X es cualquier conjunto de la forma L(G ) donde Ges una 2-dinamica finita.
Rafael Isaacs El espacio de los discursos

Regiones
Definicion
Dada una 2-dinamica G y un discurso en p ∈ X decimos quep ∈ L(G ) si existe un morfismo Γ : Gp −→ G.
Ejemplo
L(Gp) = {p} para todo p ∈ X.
Definicion
Una region de X es cualquier conjunto de la forma L(G ) donde Ges una 2-dinamica finita.
Rafael Isaacs El espacio de los discursos

Ejemplo de Region
Ejemplo
Se ha visto que A ={01i0
}i∈N
∪{0, 1, 10, 01
}es cerrado. Pues
bien, este conjunto es L(G ) cuando G es la 2-dinamica de la figuray por tanto A es una region de X.
• • •0
1
0 0 0
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos

G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos

G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos

G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos

G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos

G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos
G [∗]
Definicion
Dada una 2-dinamica G = (E ,V ) se define recursivamente Li ,j(G )para cualesquier vi , vj ∈ V : Siendo vi , vj , vk ∈ V
i) λ ∈ Li ,i
ii) Si (vi , vj , x) ∈ R entonces x ∈ Li ,j
iii) Si w ∈ Li ,j y (vj , vk , x) ∈ R entonces wx ∈ Li ,k
Tambien se define: G [∗] =⋃
vi ,vj∈VLi ,j(G )
Proposicion
Sea G es una 2-dinamica, w ∈ 2∗ y p ∈ X se tiene:
i) w ⊳ p si y solo si existe un morfismo Γ : Gw −→ Gp
ii) w ∈ G [∗] si y solo si existe un morfismo Γ : Gw −→ G
Rafael Isaacs El espacio de los discursos

w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
Proposicion
Sea G una 2-dinamica finita. Un discurso p ∈ X esta en L(G ) sisipara todo w ∈ 2+ se tiene que w ⊳ p implica w ∈ G [∗].
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
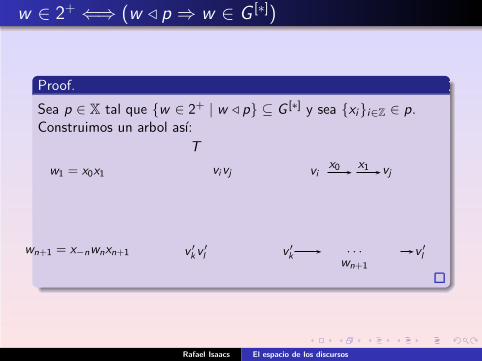
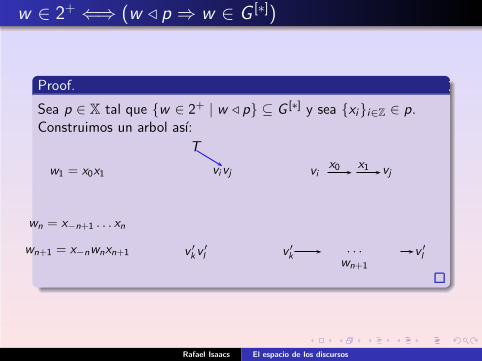
Proof.
Sea p ∈ X tal que {w ∈ 2+ | w ⊳ p} ⊆ G [∗] y sea {xi}i∈Z ∈ p.Construimos un arbol ası:
T
w1 = x0x1x0 x1vi vj
wn+1 = x−nwnxn+1
vivj
v ′
kv′
l v ′
k v ′
l. . .wn+1
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
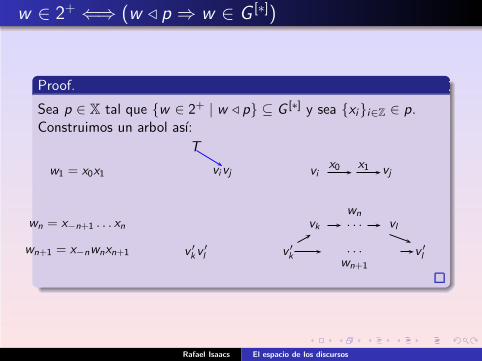
Proof.
Sea p ∈ X tal que {w ∈ 2+ | w ⊳ p} ⊆ G [∗] y sea {xi}i∈Z ∈ p.Construimos un arbol ası:
T
w1 = x0x1x0 x1vi vj
wn = x−n+1 . . . xn
wn+1 = x−nwnxn+1
vivj
v ′
kv′
l v ′
k v ′
l. . .wn+1
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
Proof.
Sea p ∈ X tal que {w ∈ 2+ | w ⊳ p} ⊆ G [∗] y sea {xi}i∈Z ∈ p.Construimos un arbol ası:
T
w1 = x0x1x0 x1vi vj
wn = x−n+1 . . . xn
wn+1 = x−nwnxn+1
vivj
v ′
kv′
l
vk vl. . .wn
v ′
k v ′
l. . .wn+1
Rafael Isaacs El espacio de los discursos
w ∈ 2+ ⇐⇒ (w ⊳ p ⇒ w ∈ G [∗])
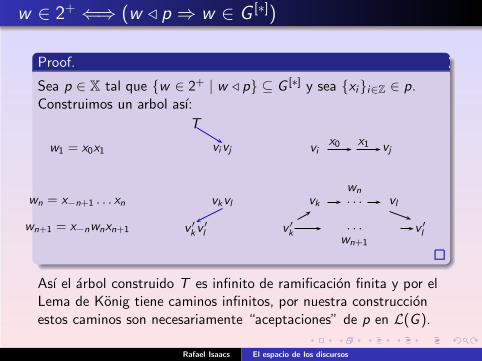
Proof.
Sea p ∈ X tal que {w ∈ 2+ | w ⊳ p} ⊆ G [∗] y sea {xi}i∈Z ∈ p.Construimos un arbol ası:
T
w1 = x0x1x0 x1vi vj
wn = x−n+1 . . . xn
wn+1 = x−nwnxn+1
vivj
vkvl
v ′
kv′
l
vk vl. . .wn
v ′
k v ′
l. . .wn+1
Ası el arbol construido T es infinito de ramificacion finita y por elLema de Konig tiene caminos infinitos, por nuestra construccionestos caminos son necesariamente “aceptaciones” de p en L(G ).
Rafael Isaacs El espacio de los discursos

Las regiones son cerradas
Corolario
Las regiones de X son conjuntos cerrados.
Proof.
Si p /∈ L(G ) existe w ⊳ p tal que w /∈ G [∗] entonces p ∈< w > y< w > ∩L(G ) = ∅
Pregunta
¿Son todos los cerrados regiones?
Rafael Isaacs El espacio de los discursos

Las regiones son cerradas
Corolario
Las regiones de X son conjuntos cerrados.
Proof.
Si p /∈ L(G ) existe w ⊳ p tal que w /∈ G [∗] entonces p ∈< w > y< w > ∩L(G ) = ∅
Pregunta
¿Son todos los cerrados regiones?
Rafael Isaacs El espacio de los discursos

Las regiones son cerradas
Corolario
Las regiones de X son conjuntos cerrados.
Proof.
Si p /∈ L(G ) existe w ⊳ p tal que w /∈ G [∗] entonces p ∈< w > y< w > ∩L(G ) = ∅
Pregunta
¿Son todos los cerrados regiones?
Rafael Isaacs El espacio de los discursos
Related Documents