© 2007 by Carnegie Mellon University Model-Based Engineering with the SAE AADL Software Engineering Institute Carnegie Mellon University Pittsburgh, PA 15213 www.aadl.info [email protected]

© 2007 by Carnegie Mellon University Model-Based Engineering with the SAE AADL Software Engineering Institute Carnegie Mellon University Pittsburgh, PA.
Dec 20, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

© 2007 by Carnegie Mellon University
Model-Based Engineering with the SAE AADL
Software Engineering Institute
Carnegie Mellon University
Pittsburgh, PA 15213
www.aadl.info

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 2
Model-Based System Engineering
RequirementsAnalysis
System Integration
Predictive Analysis Early In & Throughout Life Cycle
Architecture Modeling & Analysis
Rapid Integration Predictable Operation
UpgradeabilityReduced Cost
ABS
ABS
ABS
ETC
ETC
NAV
NAV
ETC

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 3
SAE Architecture Analysis & Design Language (AADL) Standard
• Notation for specification – task and communication architectures of Real-time,
Embedded, Fault-tolerant, Secure, Safety-critical, Software-intensive systems, of hardware platforms, and deployment
• Fields of application: – Avionics, Automotive, Aerospace, Autonomous systems, …
• Based on 15 Years of DARPA funded technologies
• Standard approved & published Nov 2004– approved as a standard by an international industry
organization
• www.aadl.info

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 4
Key Elements of SAE AADL Standard
• Core AADL language standard– Textual & graphical, precise semantics, extensible
• AADL Meta model & XMI/XML standard– Model interchange & tool interoperability
• Error Model Annex as standardized extension– Fault/reliability modeling, hazard analysis
• UML 2.0 profile for AADL– Transition path for UML practitioner community using
UML profile
More info: http://www.aadl.info

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 5
AADL: The Language
• Precise execution semantics for components & interactions– Thread, process, data, subprogram, system, processor, memory, bus,
device
• Continuous control & event response processing– Data and event flow, synchronous call/return, shared access
– End-to-End flow specifications
• Operational modes & fault tolerant configurations– Modes & mode transition
• Modeling of large-scale systems– Component variants, packaging of AADL models
• Accommodation of diverse analysis needs– Extension mechanism, standardized extensions

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 6
Model-Based Embedded System Engineering
Execution Platform
Devices Bus Processor
HTTPSGPS Ada Runtime
. . . . . . . . . .
Memory
DB
Document the Runtime
ArchitectureAbstract, but
Precise
NavigationSystem
AirbagDeploymentParking
Assistance
EmissionManagement
CruiseControl
AntilockBrakingSystem
Application Software
ElectronicFuel
Injection
System Analysis• Schedulability• Performance• Reliability• Fault Tolerance• Dynamic Configurability
System Construction• AADL Runtime System • Application Software Integration
ExternalEnvironment

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 7
Single Source AADL Architecture Model
Schedulability analysis Latency analysis
Safety analysis Reliability analysis
Faultannotations
TimingannotationsAlternative
Hardware Bindings
Application
Platform
AADL Model
Low incremental cost for additional analyses
& simulations!!!

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 8
Model-based Assurance
Predictive Analysis Across Perspectives
SecurityIntrusion
Integrity
Confidentiality
Availability & Reliability
MTBF
FMEA
Hazard analysis
Real-timePerformance
Execution time/Deadline
Deadlock/starvation
Latency
ResourceConsumption
Bandwidth
CPU time
Power consumption
Data precision/accuracy
Temporal correctness
Confidence
Data Quality
Architecture Model
Reduced model validation cost due to single source model

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 9
A Control Engineer Perspective
with Text_IO;package Main is
begin
type real is digits 14;type flag is boolean;
x : real := 0.0;ready : flag := TRUE;
K1 K2s+
-
Matlab
Component Analysis
application Code
with Text_IO;package Main is
begin
type real is digits 14;type flag is boolean;
x : real := 0.0;ready : flag := TRUE;
Simulink
Tune parameters
Continuous feedback for a control engineer
Validate simulation
Continuous feedback
in a controller

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 10
A Software System Engineer Perspectivewith Text_IO;package Main is
begin
type real is digits 14;type flag is boolean;
x : real := 0.0;ready : flag := TRUE;
AADL Tools
with Text_IO;package Main is
begin
type real is digits 14;type flag is boolean;
x : real := 0.0;ready : flag := TRUE;
AADL Runtimepackage Dispatcher is
A.p1 := B.p2;Case 10ms: dispatch(a);dispatch(b);
T1 T2 T3 T4
12 12 5 623 34 8 824 23 234
Timing analysisReliability analysis R1 R2 R3 R4
12 12 5 623 34 8 824 23 234
T1 T2 T3 T4
12 12 5 623 34 8 824 23 234
T1 T2 T3 T4
12 12 5 623 34 8 824 23 2 34
RuntimeData
R1 R2 R3 R4
12 12 5 623 34 8 824 23 234
Refine properties
Continuous feedback by comparing
analysis results with actual results
ApplicationComponents
AADL-based Architecture Model
ExecutionPlatform

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 11
A Combined Perspective
with Text_IO;package Main is
begin
type real is digits 14;type flag is boolean;
x : real := 0.0;ready : flag := TRUE;
K1 K2s+
-
MatlabComponent Analysis
Application Code
with Text_IO;package Main is
begin
type real is digits 14;type flag is boolean;
x : real := 0.0;ready : flag := TRUE;
SimulinkTune parameters
Continuous interaction between
Control engineer & system engineer
Validate simulationAADL Tools AADL Runtime
package Dispatcher is
A.p1 := B.p2;Case 10ms: dispatch(a); dispatch(b);
T1 T2 T3 T4
12 12 5 623 34 8 824 23 234
Timing analysisReliability analysis R1 R2 R3 R4
12 12 5 623 34 8 824 23 234
T1 T2 T3 T4
12 12 5 623 34 8 824 23 234
T1 T2 T3 T4
12 12 5 623 34 8 824 23 2 34
RuntimeData
R1 R2 R3 R4
12 12 5 623 34 8 824 23 234
Refine properties
AADL-based Architecture Models

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 12
AADL Views
• Component View– Model of system composition & hierarchy– Software, execution platform, and physical components– Well-defined component interfaces
• Concurrency & Interaction View– Time ordering of data, messages, and events– Dynamic operational behavior – Explicit interaction paths & protocols
• Deployment view– Execution platform as resources– Binding of application software– Specification & analysis of runtime properties
• timeliness, throughput, reliability, graceful degradation, …

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 13
Predictable System Integration Through Model-Based Engineering
• Reduce the risks – Analyze system early and throughout life cycle– Understand system wide impact and properties– Validate assumptions across system
• Increase the confidence– Validate models to complement integration testing– Validate model assumptions in operational system
• Reduce the cost– Continuous verification and simulation helps to identify errors
early– Fixing errors are easier and cheaper

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 14
Component-Based Architecture (component view)
• Specifies a well-formed interface
• All external interaction points defined as features (or ports)
• Multiple implementations per component type
• Properties to specify constrains that must be satisfied by the implementation
• Components organized into system hierarchy
• Component interaction declarations must follow system hierarchy

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 15
AADL: Components and Connections
Component type• component category• extends• features (is)• subcomponents (requires)
Component type• component category• extends• features (is)• subcomponents (requires)
Component type identifier• component category• extends {component_type}• features • flow specification • properties
Component type identifier• component category• extends {component_type}• features • flow specification • properties
Packagepublic component classifierprivate component classifier
Packagepublic component classifierprivate component classifier
features• port• port group• parameter• access• subprogram
more details
Component implementation identifier• extends {component implementation}• refines type
• subcomponents• connections• call sequences• modes • flow implementation & end-to-end flows • properties
Component implementation identifier• extends {component implementation}• refines type
• subcomponents• connections• call sequences• modes • flow implementation & end-to-end flows • properties
implementstype
Connections• data• event• event data• port group• access
Connections• data• event• event data• port group• access
is one ofProperties• standard• user defined
Properties• standard• user defined
Property set property types property definitions property values
Property set property types property definitions property values
application
platform
composite
Component Category• data• subprogram• thread• thread group• process• memory• device• processor• bus• system
modesmode transitionsmode configurations
reference

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-16
AADL Components - Graphical
process
Application Software
System Composition
Thread
Execution Platform
processor
memory
System
data
device
bus

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 17
software Components
• System: hierarchical organization of components
• Process: protected address space
• Thread group: organization of threads in processes
• Thread: a schedulable unit of concurrent execution
• Data: potentially sharable data
• Subprogram: callable unit of sequential code
process
Thread
Subprogram
Thread group
System

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 18
Hardware Components
• Processor :provides thread scheduling and execution services
• Memory : provides storage for data and source code
• Bus : provides physical connectivity between execution platform components
• Device : interface to external environment
Processor
Bus
Memory

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 19
Open Source Tools• OSATE (Open Source AADL Tool Environment)
– Eclipse based– Full language support– Full AADL XMI support– Analysis plug-ins
• Security
• Latency
• Resource budgeting
• Resource allocation (Binpacker from CMU SysWeaver)
• Graphical AADL– Basic editor from TOPCASED– Graphical viewers by Rockwell

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-20
Platform Runtime
Workspace
Help
TeamWorkbench
JFace
SWT
Eclipse Environment
JavaDevelopment
Tools(JDT)
AnalysisTool
Via XMLAADL
TextualEditor
AADL Parser
An Open Source AADL Environment
Plug-inDevelopmentEnvironment
(PDE)
Eclipse Platform
Debug
AADLGraphical
Editor
AADL Environment
AADL Object
API
XMLDocumentPersistence
AnalysisTool
Via Java
StandaloneGeneration
Tool

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 21
Benefits (Summary)• Model-based embedded system engineering benefits
– Analyzable architecture models drive development– Predictable runtime characteristics at different modeling fidelity– Model evolution & tool-based processing– Prediction early and throughout lifecycle– Reduced integration & maintenance effort
• Benefits of AADL as SAE standard– Common modeling notation across organizations– Single architecture model augmented with analysis properties– Interchange & integration of architecture models– Tool interoperability & extensible engineering environments– Aligned with UML-based engineering practices

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 22
Application Components
• System: hierarchical organization of components
• Process: protected address space
• Thread group: organization of threads in processes
• Thread: a schedulable unit of concurrent execution
• Data: potentially sharable data
• Subprogram: callable unit of sequential code
process
Thread
data
Subprogram
Thread group
System

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 23
System:
• Organize application software & execution platform into component hierarchy
• Separate component type (interface) and component implementations
• Interface specifies component features and flows Implementation defines subcomponents & connections
• Components have properties
System

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-24
Graphical & Textual Notation
system Data_Acquisition features speed_data: in data metric_speed; GPS_data: in data position_carthesian; user_input_data: in data user_input; s_control_data:out data state_control;
end Data_Acquisition;
speed_data
userinputdata
GPS_data
Data_Acquisition
s_control_data
data port
data type of port
data port

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-25
AADL Component Interaction
Flight Mgr
WarningsAnnunciations
MFD Pilot
MFD Copilot
data
1553
Weapons Mgr
• Unidirectional data & event flow
• Synchronous call/return
• Managed shared data access

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-26
Application System & Execution Platform
Flight Mgr
WarningsAnnunciations
MFD Pilot
MFD Copilot
data
1553
Weapons Mgr
CoPilot Display
Display Processor
Pilot Display
Display Processor
High speed network
MissionProcessor
1553 bus
Application system binding to execution
platform

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 27
Execution Platform Components
• Processor – provides thread scheduling and execution services
• Memory – provides storage for data and source code
• Bus – provides physical connectivity between execution platform components
• Device – interface to external environment
Processor
Device
Bus
Memory

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 28
Device
• A physical component the embedded software system interacts with
• Represents sensors, actuators, complex devices such as GPS, camera, engine
• Has physical connections to a processor via a bus• Has logical connections to software components via
ports
device brake_pedal features brake_status: out data port bool_type; sensor_comm: requires bus access CAN_Bus; end brake_pedal;
brake_pedalbrake_statussensor_comm

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 29
Ports & Connections
Data port
out
in
in out
Event port
Event data port
Port group
Ports: directional transfer of data & control
Data port: state, sampled data streams
Event port: Queued, thread dispatch & mode switch trigger
Event data port: queued messages
Port group: aggregation of ports into single connection point
Connection: connects ports in the direction of their flow

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 30
Port Groups
• Port Groups are collections of individual ports and port groups such that – a port group can be connected to individually– a component port group can be connected as a single unit
Bundling of port connections reduces graphical clutter

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 31
Flow
• Flow – provide the capability of specifying end-to-end flows to support
end-to-end timing and latency
• End-to-end flows are represented by a: – flow specification
• – externally visible flow
– flow implementation – • realization of flow specification
• end-to-end flow declaration – – logical flow from source to destination
• Flows may be at any level of abstraction• Can be hierarchical as necessary

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 32
Flow Specification
• Outside view of flow through component• Flow types
– Flow path from in port to out port– Flow source starts in component– Flow sink ends in component
• Syntax: flows F1: flow path brake -> throttle;
F2: flow path brake -> tcs;
Cc_system S1
flow path F1
flow path F2
throttle
tcs
brake

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 33
Flow Sources, Paths, Sinks
device brake_pedalfeatures
brake_status: out data port bool_type;flows
Flow1: flow source brake_status; end brake_pedal;
system cruise_controlfeatures
brake_status: in data port;throttle_setting: out data port;
flowsbrake_flow_1: flow path brake_status -> throttle_setting;
end cruise_control;
device throttle_actuatorFeatures
throttle_setting: in data port float_type;flows Flow1: flow sink throttle_setting; end throttle_actuator;
Cruise Control

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 34
Flow Implementation
• Realization of flow specification• Flow through subcomponents and connections• Subcomponent flow in terms of its flow specification
Syntax:
F1: flow path pt1 -> C1 -> P2.F5 -> C3 -> P1.F7 -> C5 -> pt2
pt3
Process P1
System implementation S1.impl
Process P2
C1 C5
C3
flow path F5 flow path F7pt1
pt2
Connection

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 35
End-To-End Flow Declaration
• Flow of information through components from endpoint to endpoint
• Follows the component hierarchy• Sources and destinations can be
– Threads– Thread groups– Processes– Devices– Processors– Systems
flow path F1
C2C1
flow sink FS1flow source FS1
Syntax:SenseControlActuate: end to end flow BrakePedal.FS1 -> C1 -> CruiseControl.F1 -> C2 -> ThrottleActuator.FS1;
BrakePedal
Cruise Control ThrottleActuator

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 36
System Instance End-To-End Flow
• Flow through leaf component of system instance• From a source through components to a destination• Sources and destinations can be
– Threads– Devices– Processors
BrakePedal
ThrottleActuator
ControllerThread
System instance
model

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-37
Initialized Thread
Inactive
Active
DeactivateComplete:
ActiveInNewMode:
Terminate:
Dispatch:
Complete:
Fault:Recovered:
InitializeComplete:
ActiveInInitMode:InactiveInInitMode:
InactiveInNewMode:
ActivateComplete:
FinalizeComplete:
Initialize
Activate
Deactivate
Finalize
Compute
Recover
Repaired:
Thread Execution State Machine
ActiveMember of
current mode
InactiveNot member of current mode
Uninitialized
Inactive
Terminated
suspend
Passivestate
Active state

© 2007 by Carnegie Mellon University
Thread properties
Using properties, the detailed description of each of the execution phases can be specified:
1)Initialize allows threads to perform application specific initialization.
2)Active allows actions to restore application states between mode switches.
3)Recover allows threads to perform fault recovery actions
4)Compute represents the code to be executed on every actions.
5)Deactivate allows actions to save application states between mode switches.
6)Finalizes executes when thread is asked to terminate as part of a process unload or stop,
MBE with AADL CourseMBE with AADL Course 38

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-39
Sample Thread Properties
• thread control• properties
-- normal execution propertiesCompute_Entrypoint=> “control_ep”;Compute_Excution_Time => 5 ms..10ms:Compute-Dealine=>20 ms;Dispatch_Protocol => Periodic;-- initialization excution propertiesInit_Entrypoint=> “Init_Control”;Init_Excution_Time => 2 ms..10ms:Init_Dealine=>10ms;
• end control;

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 40
Bus
Processor
Some Standard Properties• Dispatch_Protocol => Periodic;• Period => 100 ms;• Compute_Deadline => value (Period);• Compute_Execution_Time => 10 ms .. 20 ms; • Compute_Entrypoint => “speed_control”;• Source_Text => “waypoint.java”;• Source_Code_Size => 12 KB;
• Thread_Swap_Execution_Time => 5 us.. 10 us;• Clock_Jitter => 5 ps;
• Allowed_Message_Size => 1 KB;• Propagation_Delay => 1ps .. 2ps; • bus_properties::Protocols => CSMA;
File containing the application code
Code to be executed on dispatch
Thread
Protocols is a user defined property
Dispatch execution properties

© 2007 by Carnegie Mellon University
Analysis supported by AADL
• Examples of analysis supported by the AADL include– Scheduling– Throughput– Latency– Resource utilization– Error analysis– Reliability (FTA, and FMEA)
• In general AADL models in OSATE allows:– intermediate representation/generation of XML known as
AADL-XML which can be interfaced with any analysis engine – Also, AADL-XML provides interpretability with other AADL-
XML tool using Eclipse/AADL plug-ins– Or you can developed your own analysis engine using
Eclipse/AADL plug-insMBE with AADL CourseMBE with AADL Course 41

© 2007 by Carnegie Mellon University
guideline for problem specification analysis in AADL
• A process for problem analysis and model development involves1. Determine the scope of the area to investigate (e.g., context
diagram)
2. Understand the system components and their functionality and quality
3. Select the required style or domain specific architecture
4. Map the functional components and data and event flows to the corresponding AADL components , connections, and flows
5. Select the required analysis engine
6. Direct the output of AADL parser to the appropriate analysis engine
7. Evaluate the result
7.1 If the result is satisfactory, then you are done
else go back to the step 4 and make the needed change and follow the remaining steps
42

© 2007 by Carnegie Mellon University
Developing models using the AADL: AN Automotive Examples Problem
• Consider the following Automotive systems– Traction control system (TCS)
• The traction control system deals specifically with lateral (front-to-back) loss of tire to road friction during acceleration
– Antilock braking system (ABS)• to ensure that maximum braking is accomplished at all four
wheels of the vehicle, even under adverse conditions such as skidding on rain, snow, or ice.
– Stability control system (SCS)• to keep the vehicle going in the direction in which the driver is
steering the car. To do this, the stability control system applies the brakes to one wheel to help steer the car in the correct direction
– Cruise control system (CCS)• to maintain a constant vehicle velocity as determined by a driver-
dictated set-pointMBE with AADL CourseMBE with AADL Course 43

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 44

© 2007 by Carnegie Mellon University
The Top-level AADL Context Diagram
MBE with AADL CourseMBE with AADL Course 45
TCS
CCS
SCS
ABS

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 46

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 47
Alternative to tcs

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 48

© 2007 by Carnegie Mellon University
Determine the type of analysis
• The next step of problem analysis is to determine the perspective for analysis
• Embedded-RT system using software controller must address dataflow and timing issues seen by– Control engineer
• e.g. sampling rate
– Software engineer • e.g. scheduling and resource utilization
MBE with AADL CourseMBE with AADL Course 49

© 2007 by Carnegie Mellon University
The Top-level AADL Context Diagram
MBE with AADL CourseMBE with AADL Course 50
TCS
CCS
SCS
ABS
System engineer’ s view

© 2007 by Carnegie Mellon University
Control engineer’s view
MBE with AADL CourseMBE with AADL Course 51

© 2007 by Carnegie Mellon University
determine Analysis
• To determine analysis type, the system (System+Application+Devices) must be fully developed.
• So many signal flow paths– Consult requirements to find out associated latencies– Example,
• we are interest in modeling of latency from the brake pedal depression to the throttle actuator
• How to specify the latency in number of millisecond?
MBE with AADL CourseMBE with AADL Course 52

© 2007 by Carnegie Mellon University
Case Study: Modeling the cruise control system
• continues on specification of traction control using AADL
• To develop a complete model with the right it is necessary to identify and understand the functionality of the subsystems (components)
MBE with AADL CourseMBE with AADL Course 53

© 2007 by Carnegie Mellon University
Understanding system functionality
• The key functionality of each control system has already being discussed
• Need to describe the details of cruise control system functionalities– The basic functionality of Cruise Control System (CCS) is to
maintain the speed of a vehicle, over varying terrain, when the system is engaged by the driver
– When the brake is applied, the system must release speed control until told to resume
– Vehicle must also steadily increase/decrease the current speed when directed to do so by the driver using button (+/-)
– Or by depressing/releasing the accelerator– Releasing the buttons causes the CCS to control to the last
speed point.
MBE with AADL CourseMBE with AADL Course 54

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 55

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 56

© 2007 by Carnegie Mellon University
Procedure-call solution of CCS
MBE with AADL CourseMBE with AADL Course 57

© 2007 by Carnegie Mellon University
Mapping to the AADL
• Having identified the components and their functionality, we can begin Step 4 of the problem analysis and modeling in AADL– Using AADL, model development can be done
• Top-down
• Bottom up
• Combined approach
– We develop CCS in AADL using top-down approach• Create top level (high level view) of CCS in AADL
• Specify/refine each element of high level model
• The software component part of the model will be fully refined (implemented)
• The hardware component part of the model will be fully refined/ specified (implemented)
• The software will then be bound to the hardware to represent the composite system
MBE with AADL CourseMBE with AADL Course 58

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 59
Representing the system Hierarchy

© 2007 by Carnegie Mellon University
Modeling System Components
MBE with AADL CourseMBE with AADL Course 60

© 2007 by Carnegie Mellon University
Modeling devices: Brake Pedal
MBE with AADL CourseMBE with AADL Course 61

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 62

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 63
Next, we must define application’s software component , the cruise control.

© 2007 by Carnegie Mellon University
Methodological issue
• Solutions to the cruise control design can be including– the data-flow approach [Wang 89]; – the procedure-call approach, [Ward 87]; – the object-oriented programming approach [Booch 86, Ward
84]; – the state-based approach– feedback-control models [Shaw 95].
• Deciding which design methodology should be used to solve real-time control problems is difficult due to the complexity of interrelated issues.
• The focus here is to show how the AADL is used once a method is chosen– the procedure-call method is used (global state)
MBE with AADL CourseMBE with AADL Course 64

© 2007 by Carnegie Mellon University
Cruise control in AADL system (MAPPING TO THE AADL)
MBE with AADL CourseMBE with AADL Course 65

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 66

© 2007 by Carnegie Mellon University
Identification and modeling of Application Components
MBE with AADL CourseMBE with AADL Course 67

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 68

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 69

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 70

© 2007 by Carnegie Mellon University
Analysis: Flow Analysis
• AADL can be used to model both data and control flows
• A flow specifies the flow of data/event through multiple components a long a sequences of components and connectors
• Components (e.g., thread/process/system) has a flow specification as part of its component type declaration
• The main purpose of providing flow specifications is to support many form of end-to-end analysis– Completely through the system– Or within a subset of components
MBE with AADL CourseMBE with AADL Course 71

© 2007 by Carnegie Mellon University
Analysis: Flow Analysis (2)
• The analysis include– End-to-end timing and latency– Numerical error propagation– Processing sequences of domain objects– Quality-of-service resource mgt based on operational modes
• To perform these analysis, need– To specify relevant properties such as ports, flow
specification, and flow-specific properties• E.g., a flow-specific property could be the expected max
latency that the data within a component would experience, as well as the actual latency
MBE with AADL CourseMBE with AADL Course 72

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 73

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 74

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 75
F1: Port_1->C1->p1.F5->C2->p2.F7->C3->Port_3

© 2007 by Carnegie Mellon University
Developing the system implementation
• At this point, a top-level model of CCS has been developed– Using decomposition and refinement, each subsystem has
been refined to the lowest level– Connection among the system/subsystems have been
developed– System flows have been defined and specification based
analysis has been discussed– To complete the model, need to show
• how binding to hardware occur
• how system implementation are model based on the declarations
• how connections are made for a specific implementation,
• how flow implementation can be specified to show a complete flow analysis
MBE with AADL CourseMBE with AADL Course 76

© 2007 by Carnegie Mellon University
Binding to a Computing Platform
• AADL supports modeling of HW of the target system
• Binding the software components to the corresponding HW components allows the modeler to specify and evaluate the interactive efforts of the complete system– E.g.,
• evaluating system software on a uniprocessor system vs. a distributed parallel processor system
MBE with AADL CourseMBE with AADL Course 77

© 2007 by Carnegie Mellon University
More on binding
• The other advantage of this modeling approach is the ability to test and evaluate the system for problems that occur due to concurrency issues– E.g.,
• access order to variables, deadlock, livelock, etc) that could surface
• These problem generally not exposed until late in the software development (i.e., actual integration)
• Using AALD, software application can be mapped onto any number of processors (HW)– Help to ensure that the actual implementation is consistent with
the specified target processor
• Multiple processor may be specified and application distributed among them
MBE with AADL CourseMBE with AADL Course 78

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 79

© 2007 by Carnegie Mellon University
CCS: the processor declarations
MBE with AADL CourseMBE with AADL Course 80

© 2007 by Carnegie Mellon University
AADL: Memory
MBE with AADL CourseMBE with AADL Course 81

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 82

© 2007 by Carnegie Mellon University
Complete CCS Application part:
MBE with AADL CourseMBE with AADL Course 83

© 2007 by Carnegie Mellon University
Integrating the Application Software and hardware
MBE with AADL CourseMBE with AADL Course 84
HW components
SW+ Devices

© 2007 by Carnegie Mellon University
Development of HW or system component
• To complete the HW-component declarations, a system component must be declared that will eventually hold the HW components
• system cc-computer• -- a declaration for cc-computer to be composed of processor, memory• -- and bus in its implementation• --Needs to provide bus access so the devices in cc_application can • -- they communicate with cpu• --Devices need to attached to a bus• Features
– Devices_bus: provides bus access PC104ISA_16BIT; // i.e., system provides bus connections to // devices
• end CC-computer
MBE with AADL CourseMBE with AADL Course 85

© 2007 by Carnegie Mellon University
The concrete HW implementation for specific manufacturing company
MBE with AADL CourseMBE with AADL Course 86
Bus aces to MM and CPU

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 87
Complete System

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 88
Analysis: Specifying the End-to_End Flow for Analysis

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 89

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 90

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 91

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 92

© 2007 by Carnegie Mellon University
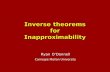
Example: Train System Controller
MBE with AADL CourseMBE with AADL Course 93
What can be read out of this figure is that the data flows from the door sensor and button into the control system and from there data is sent to the actuator.

© 2007 by Carnegie Mellon University MBE with AADL CourseMBE with AADL Course 94
Example: TD_SubSystem

© 2007 by Carnegie Mellon University
Annex
• Using annexes, AADL can be extended with new features and additions
• If a particular organization needs a special kind of feature no yet available in AADL they can develop their own implementation/specification annex.
• Currently four annexes have been verified and added to the AADL standard– the error model annex, – graphical AADL notation annex, – programming language compliance and API annex – XML/XMI Interchange Format Annex– Behavioral annex used to analyze deadlock/livelock, etc
MBE with AADL CourseMBE with AADL Course 95

© 2007 by Carnegie Mellon University
Tools
• The tools that have been analyzed are:– OSATE with TOPCASED– Cheddar•– ADeS– STOOD
MBE with AADL CourseMBE with AADL Course 96

© 2007 by Carnegie Mellon University
OSATE (Open Source ADL Tool Set)
• OSATE is build on top of eclipse and is mainly a development and type checking tool supporting some analysis tools.
• With TOPCASED-OSATE also has graphical design properties. – TOPCASED is an independent open source
project that focuses on making graphical editors for several system engineering standards.
MBE with AADL CourseMBE with AADL Course 97

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-98
AADL and Scheduling
• AADL provides precise dispatch & communication semantics via hybrid automata
• AADL task & communication abstraction does not prescribe scheduling protocols– Cyclic executive can be supported
• Specific scheduling protocols may require additional properties
• Predefined properties support rate-monotonic fixed priority preemptive scheduling
This scheduling protocol is analyzable, requires small runtime footprint, provides
flexible runtime architecture

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-99
Faults and Modes
• AADL provides a fault handling framework with precisely defined actions
• AADL supports runtime changes to task & communication configurations
• AADL defines timing semantics for task coordination on mode switching
• AADL supports specification of mode transition actions• System initialization & termination are explicitly
modeled

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-100
Behavior Modeling
• Operational modes (in core AADL)
• End-to-end flows (in core AADL)
• Error models & reliability analysis (extension)
• Lacks behavioral modeling capabilities –It can be added to address a range of behavioral analyses not provided by core language
State reachability
Flow traceability
Protocol verification
Model checking

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-101
AADL Version 2 Research Ideas
• 1. Dynamic Reconfigurable Real-Time Fault-Tolerant Asynchronous Architectures
• 2. Additional trackable automated modeling and analysis methods for architectural specs (composition, pattern recognition to reduce state space)
• 3. Rigorous links/relations between multiple engineering modeling approaches – Simulink/VHDL – AADL, SDL – AADL, compositional scheduling
• 4. Architectural verification -(is the Architecture spec correct and do components comply with their specs, stronger plug and play )
• 5. Mode transition modeling, state space reduction for mode analysis/scheduling
• 6. Modeling of specific system building approaches/patterns – example RT CORBA that can be applied as abstractions at a higher level but used to generate an implementation.
• 7. Modeling sublanguages and properties to support special areas of analysis for high integrity systems – Current Error modeling annex, safety and security annex, component behavior annex etc.

© 2007 by Carnegie Mellon University AADL TutorialAADL Tutorial I-102
AADL Status
• Requirements document SAE ARD 5296– Input from aerospace industry– Balloted and approved in 2000
• SAE AADL document SAE AS 5506– Core language: In ballot April 2004, July availability– UML profile, XML schema, Error Model Annex, Ada and C
Annex in review, to be balloted in June 2004
• Version V.2.1 September 2012
Related Documents