Cross Yöntemi Bölüm 5 255 BÖLÜM 5 5.1. CROSS METODU (HARDY CROSS-1932) Hiperstatik sistemlerin çözümünde kullanılan cross yöntemi açı yönteminin özel bir hali olup moment dağıtma (iterasyon) metodu olarak da kullanılmaktadır. Açı metodunda düğümlerde moment ve yatay dengeler yazılarak düğümlerdeki dönüş açıları ve deplasmanlar bulunarak sistem çözüldüğü halde Cross metoduyla hiperstatik sistemlerin çözümünde önce rijit düğüm noktalarında dönüşleri sıfır yapacak şekilde kilitlenir. Kilitleme ankastrelik momentlerin farkının ters işaretlisi olan bir dış momentle yapılır. Yani açı metodunda olduğu gibi düğümdeki toplam moment sıfır olacak şekilde düzenlenir. Bu uygulanan dış moment düğümde sadece dengeyi sağlamak için kabul edilen bir moment olduğu için aranan moment olarak kabul edilmemelidir. Bu kilitleme momentinden dolayı düğümde bir dönüş ve bu dönüş sonucunda da düğümdeki çubukların uçlarında bir moment oluşacaktır. Bu yöntemde bir düğüme; 1. Düğüm noktalarında dış yüklerden dolayı oluşan ankastrelik momentleri, 2. Komşu düğümlerden gelen (2EI/L’den 1/2) momentler, 3. Birim yatay (δ=1) yüklemelerinden gelen (k=-3k/L ve k=-2k/L) momentler, olmak üzere bu üç momentin farkı TERS işaretli olarak o düğüme birleşen çubuk uçlarına rijitlikleri oranında dağıtılır ve k çubuklarının ucuna düşen momentin yarısı da komşu düğüme gönderilir. 1.Diğer bütün düğümler kilitli, sadece i serbest 2. ϕ i bulunduktan sonra i aynı kalsın ve j serbest i j k i j k i j k Tüm düğümlerlerdeki dönüş açıları≠ 0 Tüm düğümlerlerdeki dönüş açıları=0

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Cross Yöntemi Bölüm 5
255
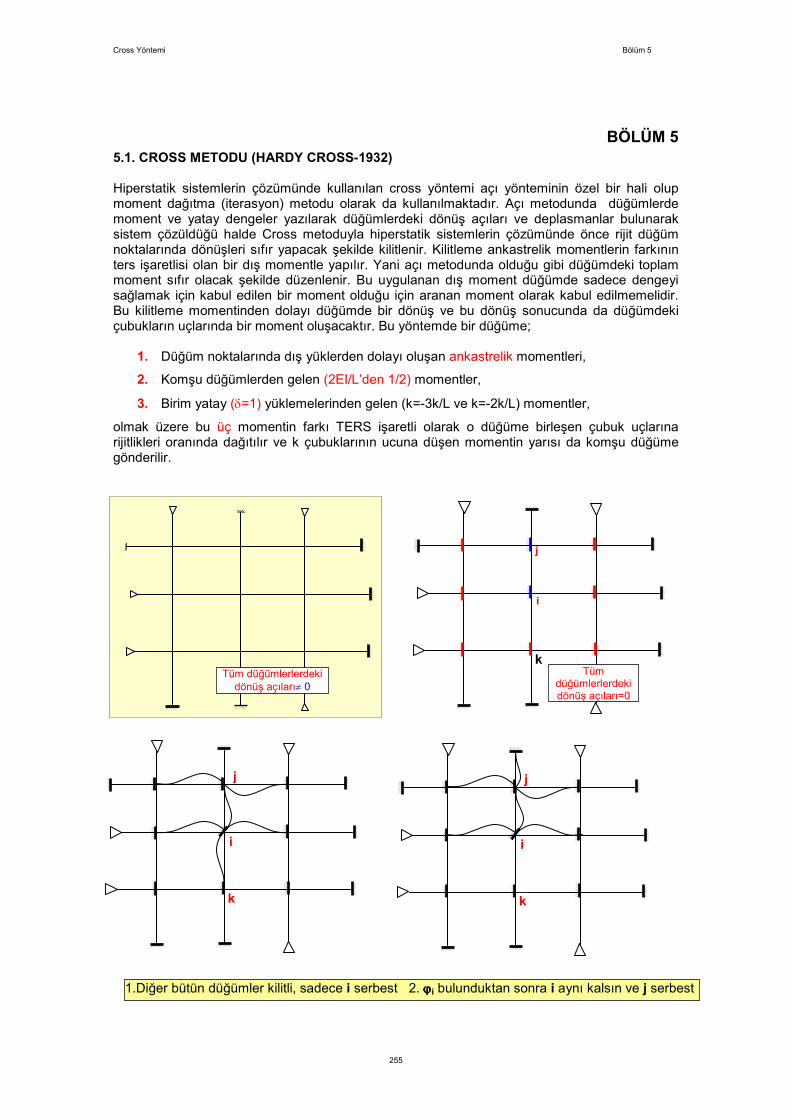
BÖLÜM 5 5.1. CROSS METODU (HARDY CROSS-1932) Hiperstatik sistemlerin çözümünde kullanılan cross yöntemi açı yönteminin özel bir hali olup moment dağıtma (iterasyon) metodu olarak da kullanılmaktadır. Açı metodunda düğümlerde moment ve yatay dengeler yazılarak düğümlerdeki dönüş açıları ve deplasmanlar bulunarak sistem çözüldüğü halde Cross metoduyla hiperstatik sistemlerin çözümünde önce rijit düğüm noktalarında dönüşleri sıfır yapacak şekilde kilitlenir. Kilitleme ankastrelik momentlerin farkının ters işaretlisi olan bir dış momentle yapılır. Yani açı metodunda olduğu gibi düğümdeki toplam moment sıfır olacak şekilde düzenlenir. Bu uygulanan dış moment düğümde sadece dengeyi sağlamak için kabul edilen bir moment olduğu için aranan moment olarak kabul edilmemelidir. Bu kilitleme momentinden dolayı düğümde bir dönüş ve bu dönüş sonucunda da düğümdeki çubukların uçlarında bir moment oluşacaktır. Bu yöntemde bir düğüme;
1. Düğüm noktalarında dış yüklerden dolayı oluşan ankastrelik momentleri,
2. Komşu düğümlerden gelen (2EI/L’den 1/2) momentler,
3. Birim yatay (δ=1) yüklemelerinden gelen (k=-3k/L ve k=-2k/L) momentler,
olmak üzere bu üç momentin farkı TERS işaretli olarak o düğüme birleşen çubuk uçlarına rijitlikleri oranında dağıtılır ve k çubuklarının ucuna düşen momentin yarısı da komşu düğüme gönderilir. 1.Diğer bütün düğümler kilitli, sadece i serbest 2. ϕϕϕϕi bulunduktan sonra i aynı kalsın ve j serbest
i
j
k
i
j
k
i
j
k Tüm düğümlerlerdeki
dönüş açıları≠ 0
Tüm düğümlerlerdeki dönüş açıları=0

Bölüm 4 Cross Yöntemi
256
I. Đterasyon
1. Bütün düğümlerdeki dönüş açıları sıfır
2. Sadece i noktası serbest yani ϕϕϕϕi ≠≠≠≠ 0 olsun ve buradan ϕϕϕϕi kolayca bulunur.
3. Sadece j noktası serbest yani ϕϕϕϕj ≠≠≠≠ 0 olsun ve ϕi yukarıda bulunan değerde olsun. Buradan
ϕϕϕϕi bilindiğine göre ϕϕϕϕj kolayca bulunur.
4. Sadece k noktası serbest yani ϕϕϕϕk ≠≠≠≠ 0 olsun ve ϕϕϕϕi -ϕϕϕϕj yukarda bulunan değerde olsun.
Buradan ϕϕϕϕi ve ϕϕϕϕj bilindiğine göre ϕϕϕϕk kolayca bulunur.
5. Yukarıdaki işlemler dönüş açısı olan bütün düğümler için yapılır ve ilk dönüş açıları
bulunmuş olur. Yani başlangıçta sıfır olan dönüş açıları yerine değerleri bulunmuş olur.
II. Đterasyon 1. Đşlemler tekrar baştan başlanarak yapılır n inci düğüme kadar yapılır ve ikinci iterasyon
tamamlanır. III. Đterasyon 1. Değişim sıfır olduğu zaman iterasyona son verilir. Ve böylece düğümlerdeki dönüş açıları
bulunur. Düğümlerdeki ankastrelik momentleri açı metodunda olduğu gibi bulunur.
kNm96.1212
2.7x3MMkNm86.4
12
6.3x5.4MM
2
3223
2
2112 ============−−−−============−−−−
kNm80.46.3x2
)4.26.3(4.2x2.1x2.7
L2
)bl(PabM
2234 ====++++
====++++
====−−−−
Bu ankastrelik momentleri düğümlere uygulanarak düğümlerdeki momentlerin dengede olması için kesikli çizgilerle gösterilen momentler düğümlere uygulanarak bütün düğümler kilitlenir. � nolu düğüm sabit mesnet olduğu için sadece dış yüklerden dolayı oluşan bir moment (3 x 0.9=2.7 kNm) bulunmaktadır.
Daha sonra düğümlerden istenilen bir tanesi açılır. Bu düğümleri açma işlemine kilitleme momenti olan ankastrelik momentleri farkının ters işaretlisinin mutlak değerce büyük olanından başlamak iterasyonun adım sayısını azaltacağından daha uygundur. Bu örnekte üç nolu düğüm açılarak ankastrelik momentler farkı olan kesikli çizgilerle gösterilen kilitleme momenti 8.16 kNm lik moment bulunur. Ancak, � nolu düğümde konsoldaki yükten dolayı oluşan bir 2.7 kNm lik bir moment bulunmaktadır. Konsol yüklerden dolayı oluşan momentlerin, kenar mesnetteki
86.4M12 ==== 4.86
�
86.4M21 ==== 96.12M23 ====
�
12.96-4.86=8.1
96.12M32 ==== 8.4M34 ====
�
12.96-4.8=8.16
7.29.0x3 ====
�
2.7
1.03I I I � � � �
4.5 kN/m 3 kN/m 7.2 kN
3.6m 2.4m 7.2m 1.2m
09m
3 kN

Cross Yöntemi Bölüm 5
257
dış yük olan momentlerin yarısı ve bir düğümde bulunan dengeleyici momentin yarısı karşı mesnede aşağıdaki kabulden dolayı geçer. Yani, düğümde dengeleyici momentten dolayı bir dönme ve bunun sonucunda da bir moment oluşacaktır. Oluşan bu momentin yarısı aynı işarette çubuğun diğer ucuna geçer. Komşu düğüm mafsallı ise bu momentin yarısı geçmeyecektir. Açı metodunun esasını teşkil eden bu kabuller açı metodu denklemlerinin çıkarılmasında aşağıdaki şekilde elde edilmişti.
Buna göre � mesnedindeki momentin yarısı � mesnedine artı olarak geçer. Konsol momentleri sağdan sola artı soldan sağa eksi geçer. Çerçevelerde ise mütemadi kirişlerin tam tersi olmaktadır. Bu durum açı yönteminde tablo halinde açıklanmıştır.
9.51 kNm lik dengeleyici kilit momenti düğüme birleşen çubukların toplamı bir olan ve rijitlikleri
dikkate alınarak hesaplanan dağıtma sayıları oranında ters işaretli olarak paylaşılarak düğüm
dengesi sağlanır. Çubuklara gelen bu momentlerin yarısı aynı işarette çubuğun diğer ucuna
yani komşu düğümlere gönderilir. Sistemin çözümü için diğer bütün düğümlerin dengesi
sağlanması şartından dolayı aynı işlem diğer komşu düğümlerde yapılır. Komşu düğümde
dengeleyici moment o düğümde önceden bulunan kilit momenti (ankastrelik momentleri farkı
olan moment) ile komşu düğümdeki dengelemeden gelen momentin toplamı ters işaretli olarak
düğüme birleşen çubukların dağıtma sayıları oranında dağıtılarak düğüm dengesi sağlanmış
olur. Bu dengeden dolayı oluşan momentlerin yarısı çubuğun diğer ucuna yani düğüm
noktasına gönderilir. Bu işleme komşu düğümlerden gelen momentlerin küçülmesi durumunda
son verilerek her çubuğun ucundaki momentler toplanarak son verilir. Bu toplam sonucu her
düğümdeki momentlerin toplamı açı metodunda olduğu gibi sıfır olmalıdır. Bir çubuğun uç
momenti,
1. Ankastrelik momentleri
2. Düğümdeki dengelemeden dolayı dağıtma sayısı oranında gelen moment
3. Çubuğun diğer ucundaki düğüm dengelemesinden dolayı o uçta oluşan momentin yarısı
momentlerinin toplamıdır.
96.12M32 ====
8.4M34 ====
�
Kilit moment=12.96-4.8+1.35 =9.51
7.29.0x3 ====
�
2.7 2.7/2=1.35
_
+ Mik
Mki=Mik/2
Uç momentleri Mki ve Mik olsun
i k
ϕi
Hiç şekil değiştirmesi olmayan
eleman i k
Mki Mik
k i
Bölüm 4 Cross Yöntemi
258
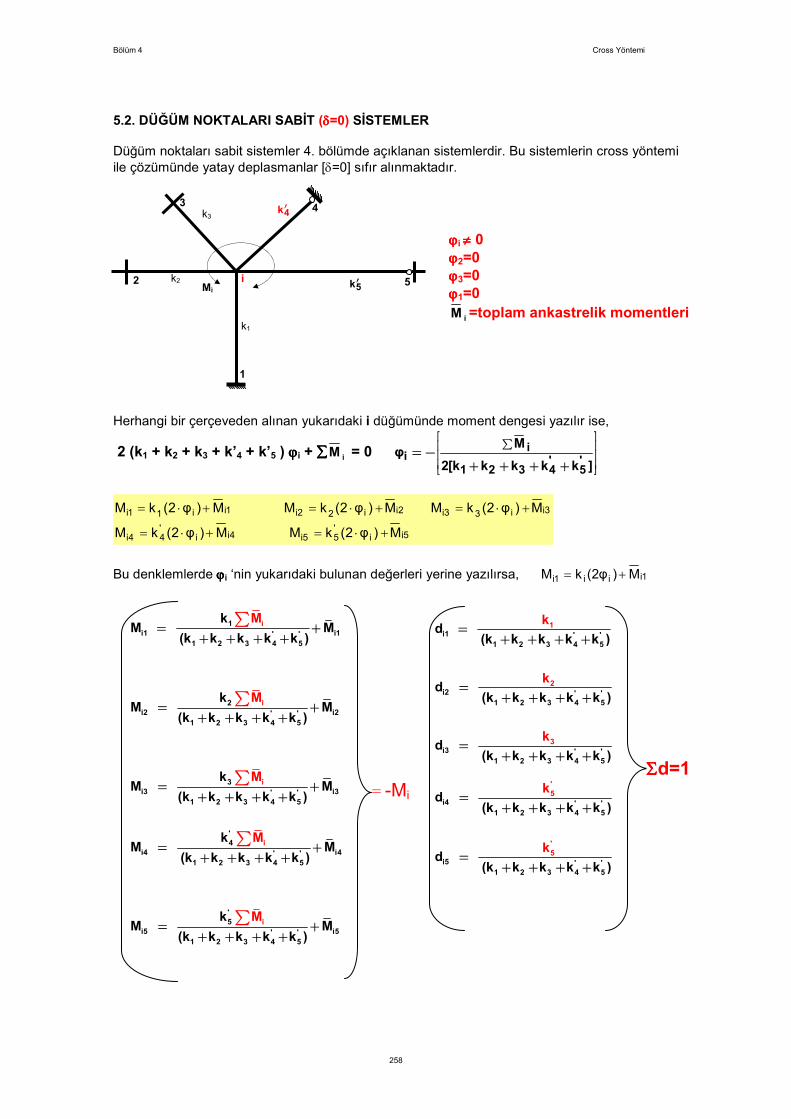
5.2. DÜĞÜM NOKTALARI SABĐT (δδδδ=0) SĐSTEMLER Düğüm noktaları sabit sistemler 4. bölümde açıklanan sistemlerdir. Bu sistemlerin cross yöntemi ile çözümünde yatay deplasmanlar [δ=0] sıfır alınmaktadır. Herhangi bir çerçeveden alınan yukarıdaki i düğümünde moment dengesi yazılır ise,
2 (k1 + k2 + k3 + k’4 + k’5 ) ϕϕϕϕi + ∑∑∑∑ iM = 0 ii ' '
1 2 3 4 5
M φ
2[k k k k k ]
∑ =− + + + +
5ii'55i4ii
'44i
3ii33i2ii22i1ii11i
M)φ2(kMM)φ2(kM
M)φ2(kMM)φ2(kMM)φ2(kM
+⋅=+⋅=
+⋅=+⋅=+⋅=
Bu denklemlerde ϕϕϕϕi ‘nin yukarıdaki bulunan değerleri yerine yazılırsa, 1iii1i M)φ2(kM +=
ϕϕϕϕi ≠≠≠≠ 0 ϕϕϕϕ2=0 ϕϕϕϕ3=0 ϕϕϕϕ1=0
iM =toplam ankastrelik momentleri
i 2
4 3
Mi
k2
4k′
1
5
k1
k3
5k′
1i1 i1' '
1 2 3 4 5
ikM M
(k k k k k )
M= +
+ + + +
∑
2i2 i2' '
1 2 3 4 5
ikM M
(k k k k k )
M= +
+ + + +
∑
3i3 i3' '
1 2 3 4 5
ikM M
(k k k k k )
M= +
+ + + +
∑
'4
i4 i4' '1 2 3 4 5
ikM M
(k k k k k )
M= +
+ + + +
∑
'5
i5 i5' '1 2 3 4 5
ikM M
(k k k k k )
M= +
+ + + +
∑
i1 ' '1 2 3 4 5
1 d
(k k k k k
k
)=
+ + + +
i2 ' '1 2 3 4 5
2 d
(k k k k k
k
)=
+ + + +
i3 ' '1 2 3 4 5
3 d
(k k k k k
k
)=
+ + + +
i4 '
'5
'1 2 3 4 5
d
(k k k k k )
k=
+ + + +
i5 '
'5
'1 2 3 4 5
d
(k k k k k )
k=
+ + + +
ΣΣΣΣd=1 = -Mi

Cross Yöntemi Bölüm 5
259
[di1 + di2 + di3 + di4 + di5] bunların her birine DAĞITMA SAYISI denir ve her düğüm için
toplamları her zaman =1 olması gerekir. Bu din sayıları düğüme birleşen çubukların L
I2k ====
ve/veya L
I5.1k ====′′′′ rijitlikleri oranına göre değişen dağıtma sayılarıdır.
Hiperstatik bir sistemim Cross metodu ile çözümünde izlenen yol sırasıyla; 1. Düğüme birleşen çubukların k ve/veya k’ değerleri ve bunlara bağlı olarak bulunan dağıtma
sayıları hesaplanır.
∑∑∑∑∑∑∑∑∑∑∑∑
============n
33i
n
22i
n
11i k
kd
k
kd
k
kd
2. Çubuğun mesnet şartlarına yükleme durumuna göre ankastrelik momentleri hesaplanır.
3. Çözüm şeması hazırlanarak dağıtma sayıları ve ankastrelik momentleri belirlenir.
4. Düğümlerde bulunan ankastrelik momentleri işaretlerine göre toplanarak mutlak değerce
büyük olan momentin bulunduğu düğümden dağıtıma başlanır. 5. Dağıtma sayılarına göre dağıtılan ankastrelik momentleri işaretlerinin tersi olarak dağıtılır.
Yani ankastrelik momenti eksi ise artı, artı ise eksi olarak dağıtılır. 6. k çubuklarında dağıtım sonucu bulunan Mij momenti çubuğun diğer ucuna yarısı aynı
işarette geçer. Bu geçiş k’ çubuklarında yapılmaz.
7. Düğümlerde dağıtılacak moment sıfıra yaklaşınca dağıtıma son verilir.
i k
ϕi
Mki Mik
k i
ik i4EI
ML
= ϕ _
+ ki i
2EIM
L= ϕ
A
B
A
ϕB
ϕA
ϕA
ϕA
ϕA B ϕB
ϕA + ϕB+
ϕB
ϕB
ϕA
ϕA
ϕA
ϕA
A
B
ϕA - ϕB-

Bölüm 4 Cross Yöntemi
260
8. Düğümlerde dağıtım bittikten sonra ankastrelik momentler dahil bütün momentler işaretleri
ile toplanır. (bir düğümde bulunan momentlerin toplamı sıfır olacağına dikkat edilmelidir değilse hesaplar kontrol edilir)
9. Çözüm sonucu bulunan momentler işaretlerine göre [saat yönü +, tersi -] düğüm noktalarına
işaretlenerek momentler çekme meydana getiren yüze çizilir. 10. Çubuk uçlarında bulunan bu momentlere ve dış yüklere göre çubuk açıklık momentleri,
kesme ve eksenel kuvvetleri bulunarak sistemin istenilen M, V ve N alanları çizilir. ÖRNEK 5.1: Şekilde yüklemesi ile birlikte verilen mütemadi kirişin moment ve kesme kuvvet diyagramlarını Cross metodu ile çiziniz.
Ankastrelik kNm50.28
5x8.0MkNm93.2
6.6
)2.26.6(2.2x2
L
)aL(aPMM
2
232112 −==−=−
=−
==−
Ankastrelik momentleri ve dağıtma sayıları tablo yapılarak yazılır. Daha sonra dağıtım yapılacak düğümde dağıtılacak moment bulunur. Örneğin � düğümünde dağıtılacak M= 2.93-2.5=0.43 tm olarak bulunur. Bu fark moment artı işaretlidir. Düğümde dengenin olabilmesi için bu momentin eksi işaretli olarak dağıtılması gerekir. Yani düğümde dağıtılacak momentin ters işaretlisi olan M=-0.43 tm dağıtılır. M21= d21 M =0.603x(-0.43)= -0.259 Düğümde dağıtım sonucu bulunan momentlerin M23= d23 M =0.397x(-0.43)= -0.171 toplamı dağıtılan momente eşit olmalıdır (0.43).
Düğüm � � � Çubuk uçları �-� �-� �-3 3-2
Çubukların k değerleri 0.455 0.300
Dağıtma sayıları 0.455/[0.455+0.3]=0.603 0.3/[0.455+0.3]=0.397
Ankastrelik momentleri -2.93 2.93 -2.50
Düğüm Dağıtılacak moment
2 (-2.5+2.93) = 0.43 -0.130 -0.43x0.603=-0.259 -0.43x0.397=-0.171
Uç momentleri -3.06 2.671 -2.671 0.00
1.5I I � � �
0.8 kN/m 2 kN
2.2m 5m 2.2m
2 kN
2.2m
1.5I I � � �
0.8 kN/m 2 kN
2.2m 5m 2.2m
2 kN
2.2m
2.06 0.06
1.941
2.53406
1.47
3.06
1.46 1.60
2.67
1.343

Cross Yöntemi Bölüm 5
261
1. açıklıkta maxMaç= ((2.059 x 2.2 – 3.06)) = 1.47 kNm
1. açıklıkta maxMaç= ((2.059 x 2.2 + 0.059 x 2.2 – 3.06)) = 1.60 kNm
2. açıklıkta maxMaç= ((1.4662 /0.8)) x 0.5 = 1.343 kNm veya
2. açıklıkta maxMaç= ((2.5342 /0.8)) x 0.5- 2.671 = 1.343 kNm
Verilen bu sistemde bilinmeyen ϕϕϕϕ2 dir. Burada ϕϕϕϕ2 nin bulunması için,
21
21222121 k2
Mk2M ====ϕϕϕϕϕϕϕϕ====
bağıntısından hesaplanır. Buradaki M21 momenti � düğümünde ankastrelik ve komşu
düğümlerden gelen momentlerin haricinde dağıtım sonucunda bulunan momentlerin toplamıdır.
2-1 elemanı 285.0455.0x2
259.0
k2
M
21
212 ====
−−−−========ϕϕϕϕ 2-3 elemanı 285.0
300.0x2
171.0
k2
M
23
232 −−−−====
−−−−========ϕϕϕϕ olur.
ÖRNEK 5.2: Verilen kirişin moment alanının Cross yöntemini kullanarak çizimi.[Bütün kirişler EI] Çözüm: Elemanların k değerleri ve ankastrelik momentleri hesaplanır. Ankastrelik
kNm81.78
5x5.2MkNm11.7
6
4x2x8MkNtm56.3
6
2x4x8MkNm05.6
8
5.5x6.1M
2
342
2
322
2
23
2
21 ==−====−==
Düğüm � 2 � �
Çubuk uçları 1-2 2-1 2-3 �-� �-4 4-�
k değerleri 0.273 0.333 0.333 0.30
Dağıtma sayıları 0.45 0.55 0.53 0.47
Ankastrelik momentleri -3.2 -1.6 6.05 -3.56 7.11 -7.81 1.41 -2.81
Düğüm Dağıtılacak moment
3 (7.11-7.81+1.41)=0.71 -0.188 -0.376 -0.334
2 (6.05-1.6-3.56-0.188)=0.702 -0.316 -0.386 -0.193
3 -0.193 0.053 0.106 0.092
2 -0.053 -0.024 -0.029 -0.015
0.008 0.007
Uç momentleri -3.2 4.110 -4.110 6.632 -6.635 -2.81
Dağıtım sonucu bulunan moment değerleri saat yönü artı tersi eksi olmak üzere çubuk uçlarına işaretlenerek moment alanı aşağıdaki şekilde çizilir.
-2.81 -3.2
k’=0.273 k=0.333 k’=0.300 � � � �
-2.81 -3.2
� � �
�
+ - + - 4.11 6.64
� � � �
1.6 kN/m 2.5 kN/m 8 kN
5.5m 5m 2m 4m 2m 1.5m
Bölüm 4 Cross Yöntemi
262
Kesme kuvvet diyagramı,
Moment diyagramı
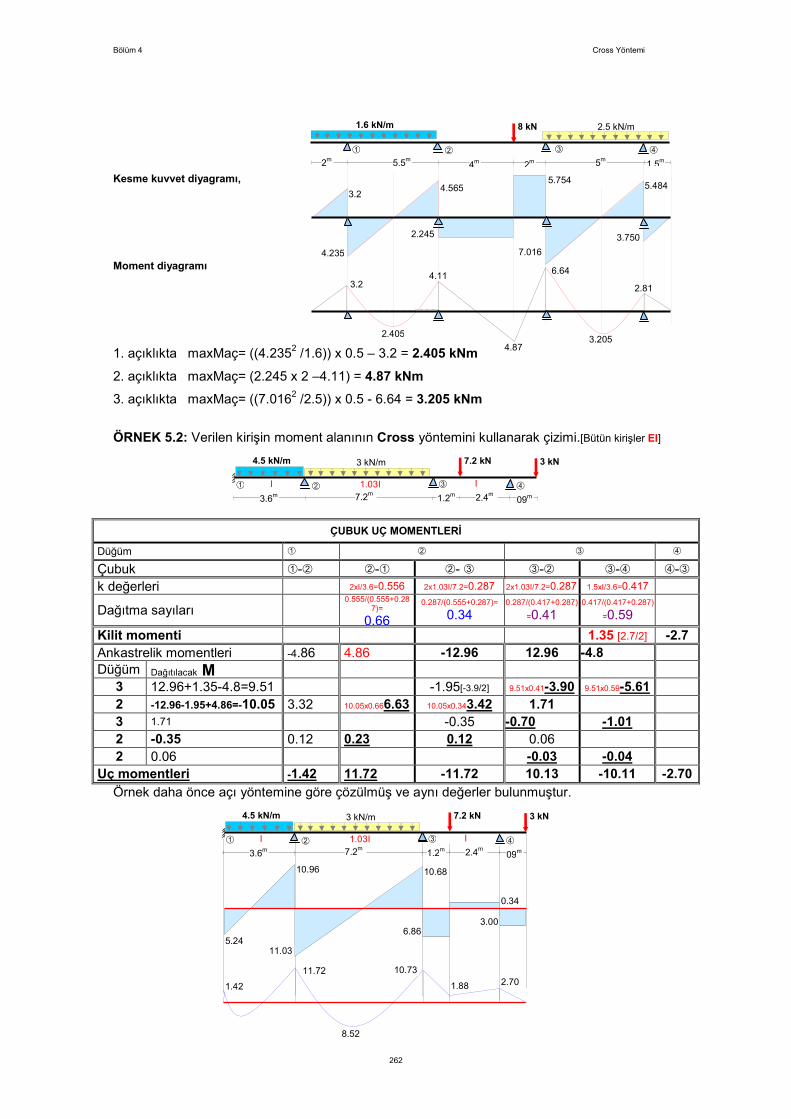
1. açıklıkta maxMaç= ((4.2352 /1.6)) x 0.5 – 3.2 = 2.405 kNm
2. açıklıkta maxMaç= (2.245 x 2 –4.11) = 4.87 kNm
3. açıklıkta maxMaç= ((7.0162 /2.5)) x 0.5 - 6.64 = 3.205 kNm
ÖRNEK 5.2: Verilen kirişin moment alanının Cross yöntemini kullanarak çizimi.[Bütün kirişler EI]
ÇUBUK UÇ MOMENTLERĐ
Düğüm � � � �
Çubuk �-� �-� �- � �-� �-� �-� k değerleri 2xI/3.6=0.556 2x1.03I/7.2=0.287 2x1.03I/7.2=0.287 1.5xI/3.6=0.417
Dağıtma sayıları 0.555/(0.555+0.28
7)=
0.66
0.287/(0.555+0.287)=
0.34 0.287/(0.417+0.287)
=0.41 0.417/(0.417+0.287)
=0.59
Kilit momenti 1.35 [2.7/2] -2.7 Ankastrelik momentleri -4.86 4.86 -12.96 12.96 -4.8 Düğüm Dağıtılacak M
3 12.96+1.35-4.8=9.51 -1.95[-3.9/2] 9.51x0.41-3.90 9.51x0.59-5.61 2 -12.96-1.95+4.86=-10.05 3.32 10.05x0.666.63 10.05x0.343.42 1.71 3 1.71 -0.35 -0.70 -1.01 2 -0.35 0.12 0.23 0.12 0.06 2 0.06 -0.03 -0.04
Uç momentleri -1.42 11.72 -11.72 10.13 -10.11 -2.70
Örnek daha önce açı yöntemine göre çözülmüş ve aynı değerler bulunmuştur.
5.484 3.2
4.235 7.016
2.245 3.750
5.754 4.565
� � � �
1.6 kN/m 2.5 kN/m 8 kN
5.5m 5m 2m 4m 2m 1.5m
2.81
6.64
3.205 4.87
3.2 4.11
2.405
1.03I I I � � � �
4.5 kN/m 3 kN/m 7.2 kN
3.6m 2.4m 7.2m 1.2m
09m
3 kN
1.03I I I � � � �
4.5 kN/m 3 kN/m 7.2 kN
3.6m 2.4m 7.2m 1.2m
09m
3 kN
5.24
3.00
0.34
6.86
10.96
11.03
10.68
1.42
11.72 10.73
1.88 2.70
8.52

Cross Yöntemi Bölüm 5
263
Uygulama: Verilen mütemadi kirişin verilen yükler ve mesnet hareketlerinden dolayı oluşan M alanının elde edilmesi Çözüm: Verilen dış yüklerden ve mesnet çökme ve dönmelerinden oluşan ankastrelik momentleri
2 2 2 2
12 21
2 2
23
2
2 2
342
2 2
3
2
qL 2x5M M 4.167kNm [Düzgünya
Pab 2x 2x3 Pba 2x3 x 2M 1.44kNm M 0.96kNm [Tekil yük]
L 5 L 5
7qL 7 x8 x 6M 16.80kNm
1yılıyük
20 120[Üçgenyayılıyük]]
12 12
= = = = =
− = = = −
=
− = = = =
ÇUBUK UÇ MOMENTLERĐ
Düğüm � � � �
Çubuk �-� �-� �- � �-� �-� �-� k değerleri 0.4 0.4 0.4 0.4 0.25 Dağıtma sayıları 0.5 0.5 0.615 0.385
Dış yüklerden -1.44 0.96 -4.167 4.167 -16.80+2 -4
Mesnet çökmesi -151.30 -151.30 26.27 Ankastrelik momentleri
Mesnet dönmesi 157.60 78.80 Düğüm Dağıtılacak M
2 0.96-151.3+78.8-4.167=-75.71 18.93 37.85 37.85 18.93 3 4.167+2-16.80+26.27+18.93=34.57 -10.63 -21.26 -13.31 2 -10.63 2.66 5.32 5.32 2.66 3 2.66 -0.82 -1.64 -1.02 2 -0.82 0.21 0.41 0.41 0.21 3 0.21 -0.13 -0.08
Uç momentleri 26.66 -27.96 27.96 2.94 -2.94 -4
� � � �
2 kN 2 kN/m 8 kN/m
6m 2m 3m 2m 5m
4 kNm
� � � �
3m 5m
k=0.4 k=0.4 k’=0.25 4 kNm
6m 2m
1 2
2 kNm 1.44 kNm 0.96kNm
1 2
4EIϕ/5=157.6 78.8=2EIϕ/5
2 3
4.17 kNm 4.17 kNm
1 2
1 2
8 mm Eşit çökme
3 4
16.8 kNm
1
2 6EIδ/52=151.3
8 mm
6EIδ/52=151.3 3 4
8 mm 4 mm
3EIδ/62=26.27
3EIδ/62=26.27
(-) alınır (+) alınır
i i i k 2
4EI 2EI 6EIM M
L L L= + ϕ + ϕ − δ
k k k i 2
4EI 2EI 6EIM M
L L L= + ϕ + ϕ − δ
4.00
26.67
29.57 27.93
4.00
14.92
2.94
Bölüm 4 Cross Yöntemi
264
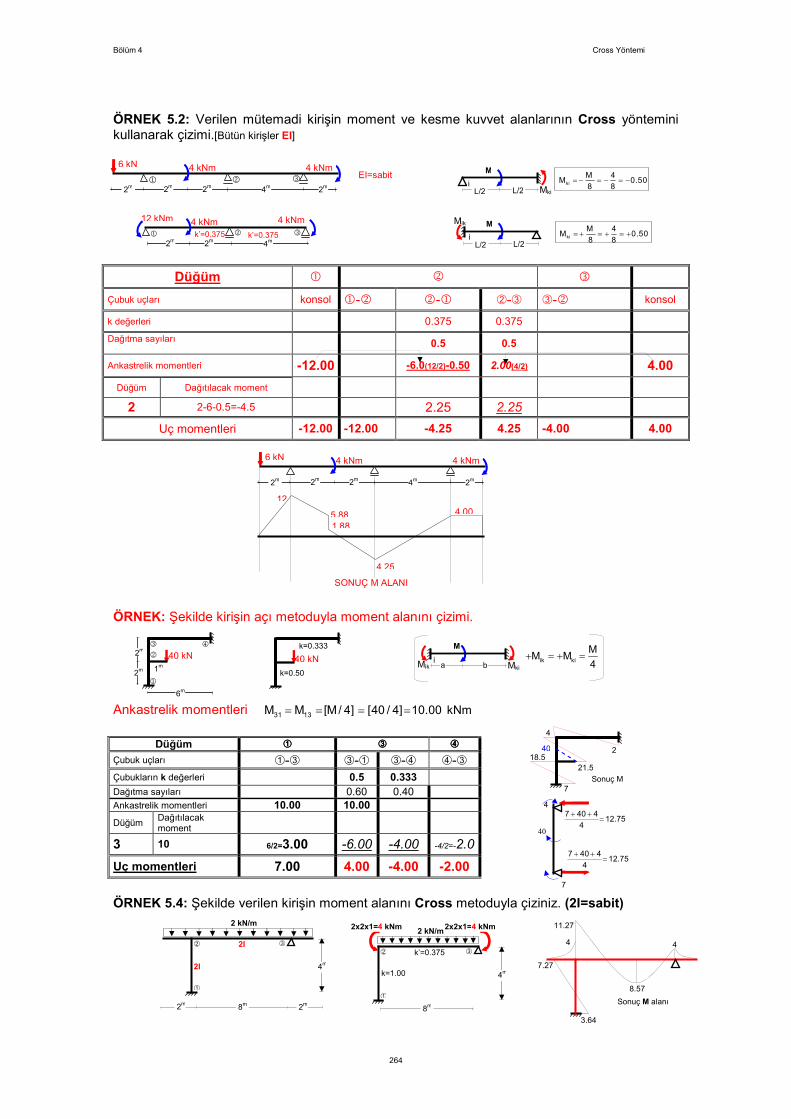
ÖRNEK 5.2: Verilen mütemadi kirişin moment ve kesme kuvvet alanlarının Cross yöntemini kullanarak çizimi.[Bütün kirişler EI]
Düğüm � 2 �
Çubuk uçları konsol 1-2 2-1 �-� �-2 konsol
k değerleri 0.375 0.375 Dağıtma sayıları 0.5 0.5
Ankastrelik momentleri -12.00 -6.0(12/2)-0.50 2.00(4/2) 4.00
Düğüm Dağıtılacak moment
2 2-6-0.5=-4.5 2.25 2.25
Uç momentleri -12.00 -12.00 -4.25 4.25 -4.00 4.00
ÖRNEK: Şekilde kirişin açı metoduyla moment alanını çizimi. Ankastrelik momentleri 31 13M M [M/ 4] [40 / 4] 10.00 kNm= = = =
Düğüm ���� ���� ����
Çubuk uçları �-� �-� �-� �-� Çubukların k değerleri 0.5 0.333 Dağıtma sayıları 0.60 0.40 Ankastrelik momentleri 10.00 10.00
Düğüm Dağıtılacak moment
3 10 6/2=3.00 -6.00 -4.00 -4/2=-2.0
Uç momentleri 7.00 4.00 -4.00 -2.00
ÖRNEK 5.4: Şekilde verilen kirişin moment alanını Cross metoduyla çiziniz. (2I=sabit)
4 3 2
1
40 kN
6m
2m
2m
1m 40 kN
k=0.50
k=0.333
18.5
Sonuç M
21.5
40
4
7
2
4 7 40 4
12.754
+ +=
7
40
7 40 412.75
4
+ +=
Mik i
a Mki
M
b ik ki
MM M
4+ = + =
3 2 1
6 kN 4 kNm
2m 2m 2m 4m 2m
4 kNm EI=sabit
ki
M 4M 0.50
8 8= − = − = −i
L/2 Mki
M
L/2
2I �
�
�
2 kN/m
4m
8m 2m 2m
2I
2 kN/m 2x2x1=4 kNm
k’=0.375 �
�
�
4m
8m
k=1.00
2x2x1=4 kNm 11.27
4
7.27
3.64
8.57
Sonuç M alanı
4
k’=0.375 2 3 ki
M 4M 0.50
8 8= + = + = + i
L/2
Mik M
L/2
12 kNm 4 kNm
2m 2m 4m
4 kNm
1 k’=0.375
6 kN 4 kNm
2m 2m 2m 4m 2m
4 kNm
12
5.88 1.88
4.25
4.00
SONUÇ M ALANI

Cross Yöntemi Bölüm 5
265
Düğüm � � � Çubuk uçları 1-� konsol �-1 �-� �-� konsol Çubukların k değerleri 1.00 0.357 Dağıtma sayıları 0.727 0.273 Ankastrelik momentleri - [-4.00]4.00 - -16.00 2.00 [-4.00]4.00 -4.00 Düğüm Dağıtılacak moment
2 4+2-16=-10==10 3.64 7.27 2.73
Uç momentleri 3.64 4.00 7.27 -11.27 -4.00 -4.00
ΣΣΣΣ3.64 0.00 -4.00
ÖRNEK 5.5: Şekilde verilen kirişin moment alanını Cross metoduyla çiziniz.
Çözüm: Đlk önce sistemin taşınan ve taşıyan kısımları ayrılarak taşınan kısmın mesnet tepki kuvveti taşıyan hiperstatik kısma aktarılır ve hiperstatik kısmın çözümü yapılır.
Ankastrelik momenti 2 2
23 32
qL 2x 4M M kNm
122
12.67− = = = =
Düğüm � �
Çubuk uçları Konsol �-1 �-� �-� �-� Konsol �-� Çubukların k değerleri 0.53 1.00 1.00 1.00 Dağıtma sayıları 0.346 0.654 0.500 0.500 Ankastrelik momentleri 6.00 -2.67 2.67 -4.00 Düğüm Dağıtılacak moment
2 6-2.67=3.33 -1.152 -2.178 -1.089
3 2.67-4-1.089=2.419 0.605 1.210 1.210 0,605
2 0.605 -0.209 -0.396 -0.198 3 0.198 0.05 0.099 0.099 0,05
2 0.05 -0.02 -0.03
Uç momentleri 6.00 -1.381 -4.619 2.692 1.309 -4.00 0.655
6 kNm 4 kNm
�
�
�
�
2 kN/m
4m 4m
2.692
1.381
4.619
0.655
1.309
4.00
4.00
4.00
6.00
0.403 1.563
2.5m
2 kN/m
2.5 2.5
4 kNm
2.5m
�
2I m
2I �
�
�
2 kN/m
4m 4m
2.5
Taşıyan hiperstatik kısım
Taşınan izostatik kısım
2.5m 1.5m
1m
�
2I m
2I �
�
�
2 kN/m
4m 2m 4m
4m 4 kN
2I
mafsal
Bölüm 4 Cross Yöntemi
266
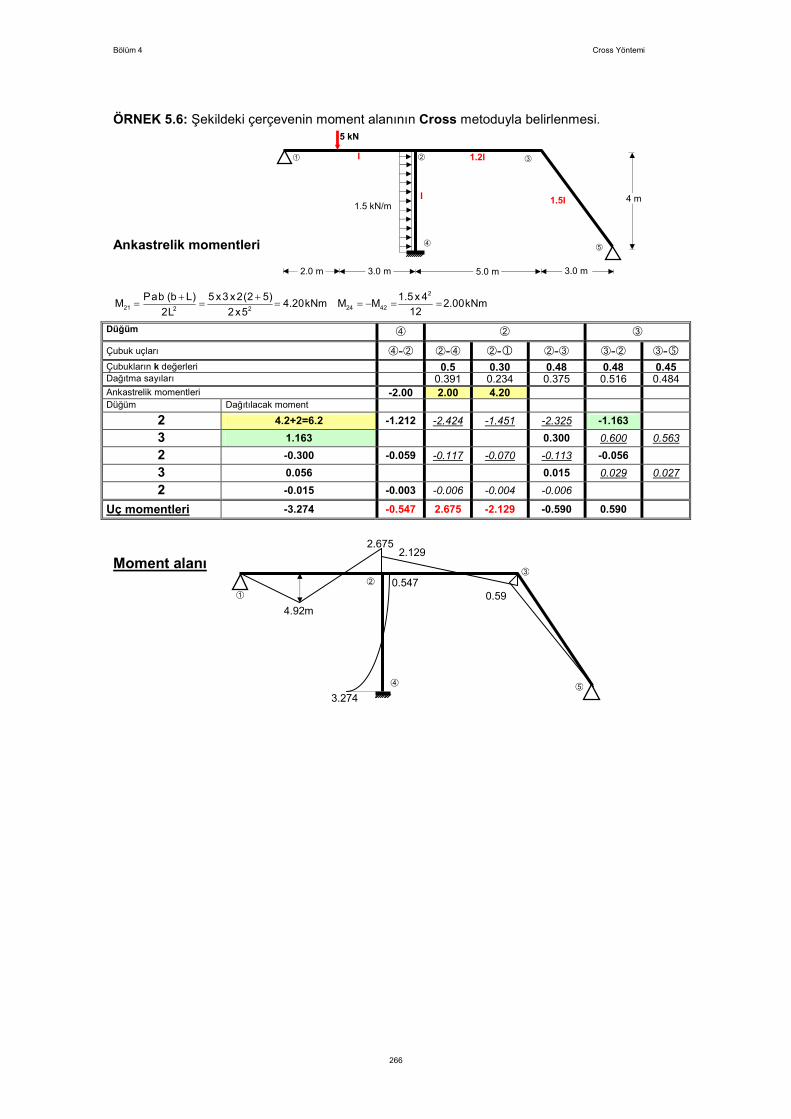
ÖRNEK 5.6: Şekildeki çerçevenin moment alanının Cross metoduyla belirlenmesi.
Ankastrelik momentleri
2
21 24 422 2
Pab (b L) 5 x3 x2(2 5) 1.5x 4M 4.20kNm M M 2.00kNm
122L 2x5
+ += = = = − = =
Düğüm � � �
Çubuk uçları �-� �-� �-1 �-� �-� �-5 Çubukların k değerleri 0.5 0.30 0.48 0.48 0.45 Dağıtma sayıları 0.391 0.234 0.375 0.516 0.484 Ankastrelik momentleri -2.00 2.00 4.20 Düğüm Dağıtılacak moment
2 4.2+2=6.2 -1.212 -2.424 -1.451 -2.325 -1.163
3 1.163 0.300 0.600 0.563
2 -0.300 -0.059 -0.117 -0.070 -0.113 -0.056
3 0.056 0.015 0.029 0.027
2 -0.015 -0.003 -0.006 -0.004 -0.006
Uç momentleri -3.274 -0.547 2.675 -2.129 -0.590 0.590
Moment alanı
2.675
� m
4.92m
�
�
�
� m
3.274 m
0.547
2.129
0.59
I m
1.5 kN/m I m
1.5I m
1.2I m
�
�
�
4 m
� m
� m
5 kN
3.0 m 2.0 m 3.0 m 5.0 m
Cross Yöntemi Bölüm 5
267
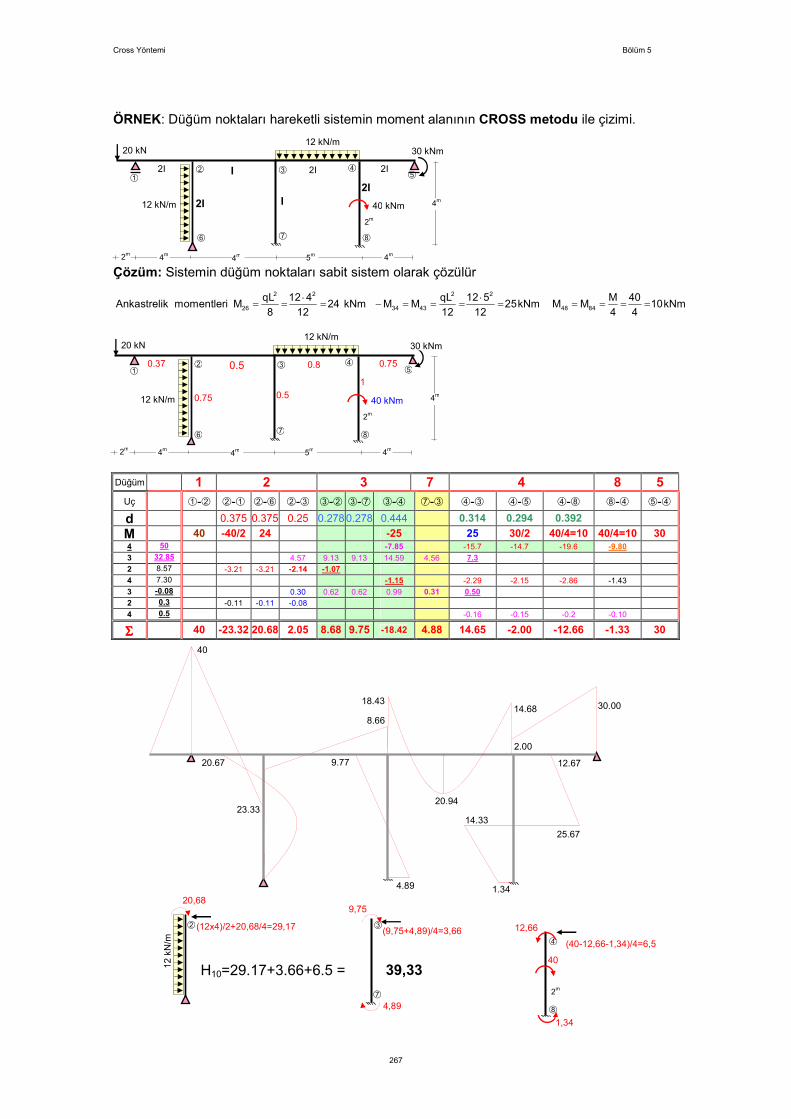
ÖRNEK: Düğüm noktaları hareketli sistemin moment alanının CROSS metodu ile çizimi. Çözüm: Sistemin düğüm noktaları sabit sistem olarak çözülür
2 2 2 2
26 34 43 48 84
qL 12 4 qL 12 5 M 40Ankastrelik momentleri M 24 kNm M M 25kNm M M 10kNm
8 12 12 12 4 4
⋅ ⋅= = = − = = = = = = = =
Düğüm 1 2 3 7 4 8 5 Uç �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-�
d 0.375 0.375 0.25 0.278 0.278 0.444 0.314 0.294 0.392
M 40 -40/2 24 -25 25 30/2 40/4=10 40/4=10 30 4 50 -7.85 -15.7 -14.7 -19.6 -9.80
3 32.85 4.57 9.13 9.13 14.59 4.56 7.3
2 8.57 -3.21 -3.21 -2.14 -1.07
4 7.30 -1.15 -2.29 -2.15 -2.86 -1.43
3 -0.08 0.30 0.62 0.62 0.99 0.31 0.50
2 0.3 -0.11 -0.11 -0.08
4 0.5 -0.16 -0.15 -0.2 -0.10
ΣΣΣΣ 40 -23.32 20.68 2.05 8.68 9.75 -18.42 4.88 14.65 -2.00 -12.66 -1.33 30
H10=29.17+3.66+6.5 = 39,33
40
�
2m
�
12,66
1,34
(40-12,66-1,34)/4=6,5
12 kN/m
�
I
2I
� �
I 2I
2I �
� �
2m
4m
20 kN 30 kNm
4m 5m 4m 2m 4m
2I 2I
40 kNm 12 kN/m
� �
12 kN/m
�
0.5
0.75
� �
0.5
1
0.8 �
� �
2m
4m
20 kN 30 kNm
4m 5m 4m 2m 4m
0.75 0.375
40 kNm 12 kN/m
� �
40
23.33
20.67
18.43
8.66
9.77
4.89 1.34
14.33
25.67
30.00 14.68
2.00
12.67
20.94
(12x4)/2+20,68/4=29,17 �
12 k
N/m
20,68 9,75
�
� 4,89
(9,75+4,89)/4=3,66

Bölüm 4 Cross Yöntemi
268
Dış kuvvetler kaldırılarak sistem sadece δ=1 alınarak moment alanı bulunur.
δδδδ=1 için çözüm Düğüm 1 2 3 7 4 8 5
Uç �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-�
d 0.375 0.375 0.25 0.278 0.278 0.444 0.314 0.294 0.392
M -37,5 -37,5 -37,5 -75 -75 4 75 11,78 23,55 22,05 29,4 14,7
3 25,72 3,58 7,15 7,15 11,42 3,58 5,71
2 33,92 12,72 12,72 8,48 4,24
4 5,35 -0,9 -1,79 -1,68 -2,24 -1,12
3 3,34 -0,47 -0,93 -0,93 -1,48 -0,47 -0,74
2 0,47 0,18 0,18 0,12 0,06
4 0,74 0,12 0,23 0,22 0,29 0,15
3 0,18 -0,03 -0,05 -0,05 -0,08 -0,03 -0,04
ΣΣΣΣ 12,9 -24,6 11,68 10,47 -31,33 20,86 -34,42 26,96 20,59 -47,55 -61,27
H11=6.15+16.44+27.21 = 49,79 H10 - δ .H11 = 0 39.33 – 49.79δ = 0 δ= 0.790 Momentler M = M0+ δ.M1 eşitliğinden hesap edilir. Örnek momentler: M73 = 4,88 + 0,790. (-34,42) = 22,31 M84 = -1,33 + 0,790. (-61,27) = -49,73 M32 = 8,68 + 0,790. 10,47 = 16,95
24,6/4=6,15 �
24,6 31,33
�
� 34,42
(31,33+34,42)/4=16,44 �
�
47,55
61,27
(47,55+61,27)/4=27,21
Cross Yöntemi Bölüm 5
269
CROSS BÜTÜN SĐSTEM HESABA ESAS SĐSTEM BÜTÜN SĐSTEM HESABA ESAS SĐSTEM S
ĐME
TR
ĐK S
ĐST
EM
SĐM
ET
RĐK
Y
ÜK
LE
ME
SĐM
ET
RĐK
SĐS
TE
M A
NT
ĐME
TR
ĐK
YÜ
KLE
ME
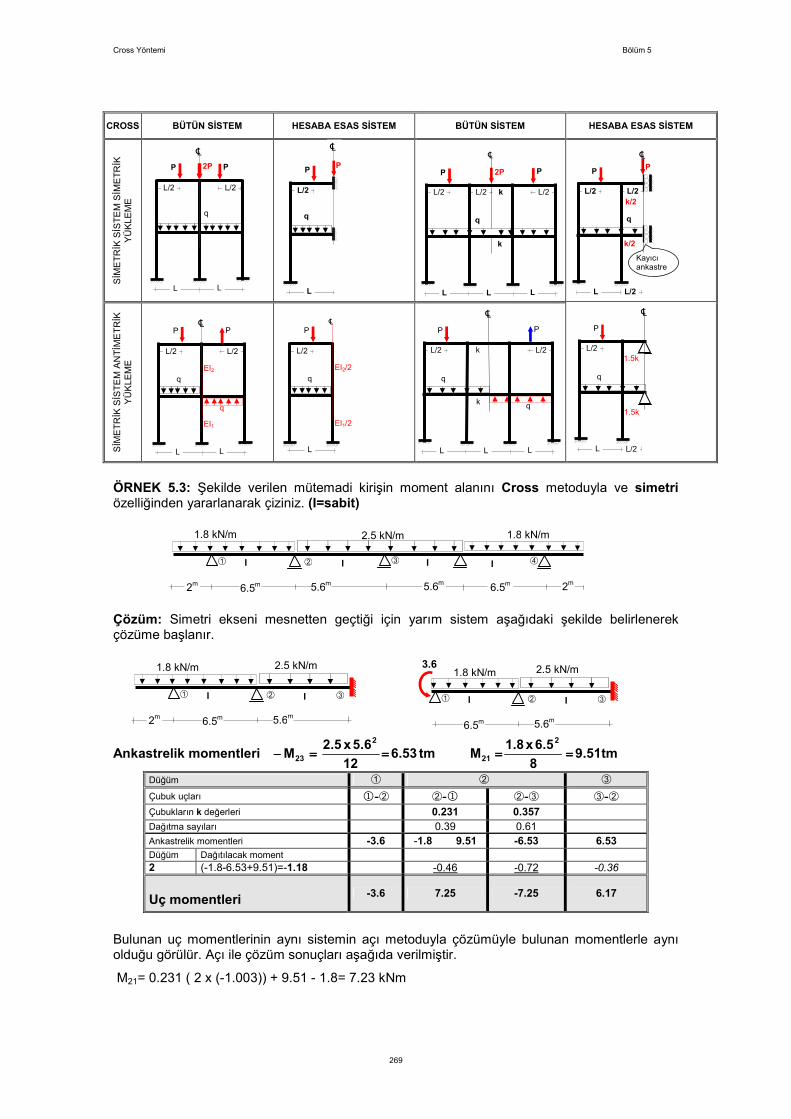
ÖRNEK 5.3: Şekilde verilen mütemadi kirişin moment alanını Cross metoduyla ve simetri özelliğinden yararlanarak çiziniz. (I=sabit) Çözüm: Simetri ekseni mesnetten geçtiği için yarım sistem aşağıdaki şekilde belirlenerek çözüme başlanır.
Ankastrelik momentleri tm51.98
5.6x8.1Mtm53.6
12
6.5x5.2M
2
21
2
23 ================−−−−
Düğüm � � � Çubuk uçları 1-� �-1 �-� �-� Çubukların k değerleri 0.231 0.357 Dağıtma sayıları 0.39 0.61 Ankastrelik momentleri -3.6 -1.8 9.51 -6.53 6.53 Düğüm Dağıtılacak moment 2 (-1.8-6.53+9.51)=-1.18 -0.46 -0.72 -0.36
Uç momentleri -3.6 7.25 -7.25 6.17
Bulunan uç momentlerinin aynı sistemin açı metoduyla çözümüyle bulunan momentlerle aynı olduğu görülür. Açı ile çözüm sonuçları aşağıda verilmiştir.
M21= 0.231 ( 2 x (-1.003)) + 9.51 - 1.8= 7.23 kNm
P
q
P 2P
L L
L/2 L/2
℄
q
P P
L
L/2
℄ ℄
q
k
P P 2P
L L
L/2 L/2 L/2
L
k
℄
Kayıcı ankastre mesnet
k/2
P
q
P
L/2
L/2 L/2
L
k/2
q
q
EI2
P P
L L
L/2 L/2
EI1
℄
q
EI2/2
P
L/2
EI1/2
L
℄
q
q
k
P P
L L
L/2 L/2
L
℄
k 1.5k
q
1.5k
P
L/2
L/2
L
℄
I � � � �
2.5 kN/m
6.5m 5.6m 2m 6.5m 5.6m
1.8 kN/m 1.8 kN/m
2m
I I I
I � � �
2.5 kN/m
2m 6.5m 5.6m
1.8 kN/m
I
3.6
I � � �
2.5 kN/m
6.5m 5.6m
1.8 kN/m
I
Bölüm 4 Cross Yöntemi
270
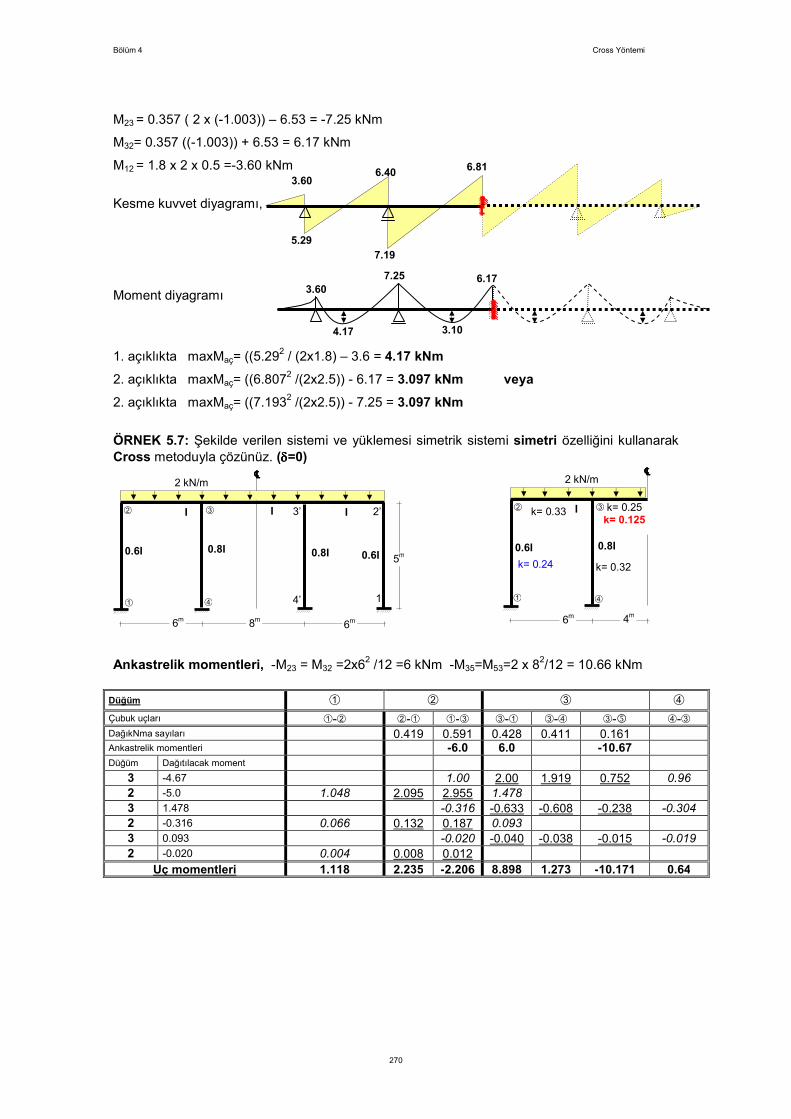
M23 = 0.357 ( 2 x (-1.003)) – 6.53 = -7.25 kNm
M32= 0.357 ((-1.003)) + 6.53 = 6.17 kNm
M12 = 1.8 x 2 x 0.5 =-3.60 kNm
Kesme kuvvet diyagramı, Moment diyagramı 1. açıklıkta maxMaç= ((5.292 / (2x1.8) – 3.6 = 4.17 kNm
2. açıklıkta maxMaç= ((6.8072 /(2x2.5)) - 6.17 = 3.097 kNm veya
2. açıklıkta maxMaç= ((7.1932 /(2x2.5)) - 7.25 = 3.097 kNm
ÖRNEK 5.7: Şekilde verilen sistemi ve yüklemesi simetrik sistemi simetri özelliğini kullanarak Cross metoduyla çözünüz. (δδδδ=0) Ankastrelik momentleri, -M23 = M32 =2x62 /12 =6 kNm -M35=M53=2 x 82/12 = 10.66 kNm
Düğüm � � � � Çubuk uçları �-� �-� �-� �-� �-� �-5 �-� DağıkNma sayıları 0.419 0.591 0.428 0.411 0.161 Ankastrelik momentleri -6.0 6.0 -10.67 Düğüm Dağıtılacak moment
3 -4.67 1.00 2.00 1.919 0.752 0.96
2 -5.0 1.048 2.095 2.955 1.478 3 1.478 -0.316 -0.633 -0.608 -0.238 -0.304
2 -0.316 0.066 0.132 0.187 0.093 3 0.093 -0.020 -0.040 -0.038 -0.015 -0.019
2 -0.020 0.004 0.008 0.012 Uç momentleri 1.118 2.235 -2.206 8.898 1.273 -10.171 0.64
℄℄℄℄ 2 kN/m
0.6I m
3’ m
2’ m
1’ m
� m
� I
� m
� m
0.8I 0.6I m
I I
4’ m
0.8I 5m
6m 8m 6m
℄℄℄℄ 2 kN/m
k= 0.24 k= 0.32
k= 0.25 k= 0.125
k= 0.33 � m
� I
� m
� m
0.8I 0.6I m
6m 4m
6.40 6.81
7.19
3.60
5.29
3.10
3.60 7.25
4.17
6.17
Cross Yöntemi Bölüm 5
271
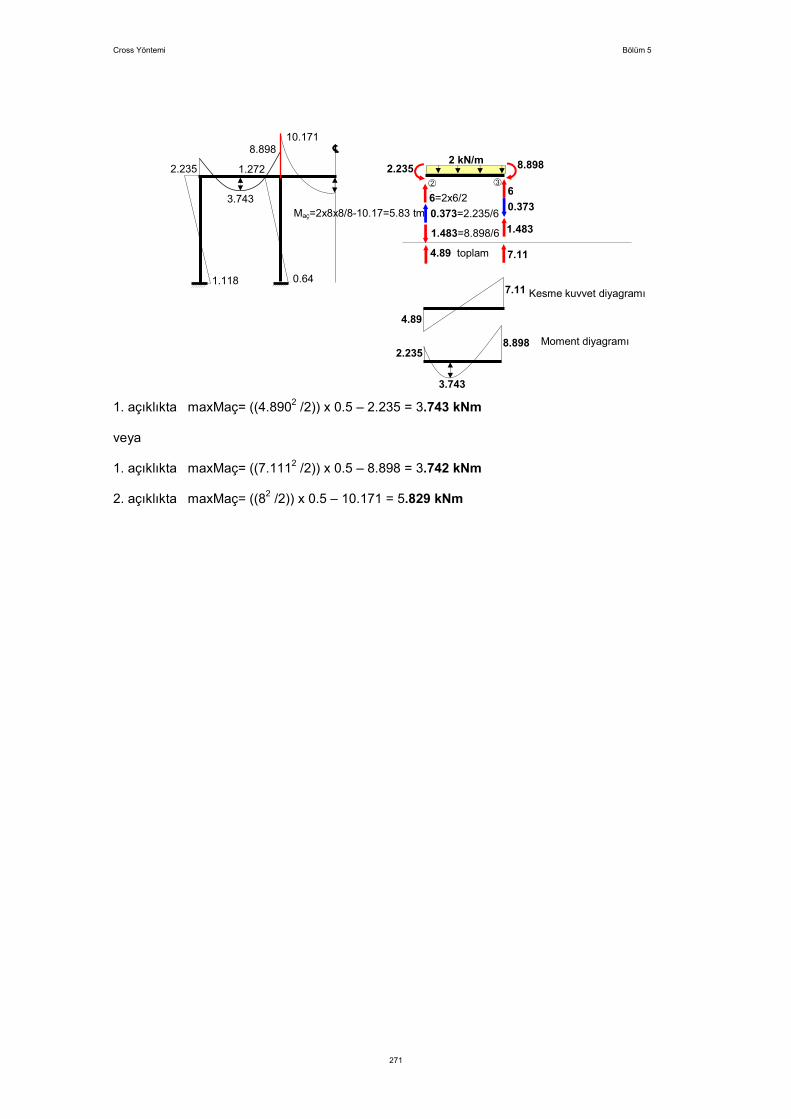
1. açıklıkta maxMaç= ((4.8902 /2)) x 0.5 – 2.235 = 3.743 kNm veya 1. açıklıkta maxMaç= ((7.1112 /2)) x 0.5 – 8.898 = 3.742 kNm 2. açıklıkta maxMaç= ((82 /2)) x 0.5 – 10.171 = 5.829 kNm
1.118
2.235
Maç=2x8x8/8-10.17=5.83 tm
1.272
8.898 10.171
0.64
3.743
℄℄℄℄
�
m �
2 6
0.373 6=2x6/2
2 kN/m 2.235 8.898
0.373=2.235/6
1.483=8.898/6 1.483
4.89 toplam 7.11
4.89
7.11 Kesme kuvvet diyagramı
3.743
8.898 2.235
Moment diyagramı
Bölüm 4 Cross Yöntemi
272
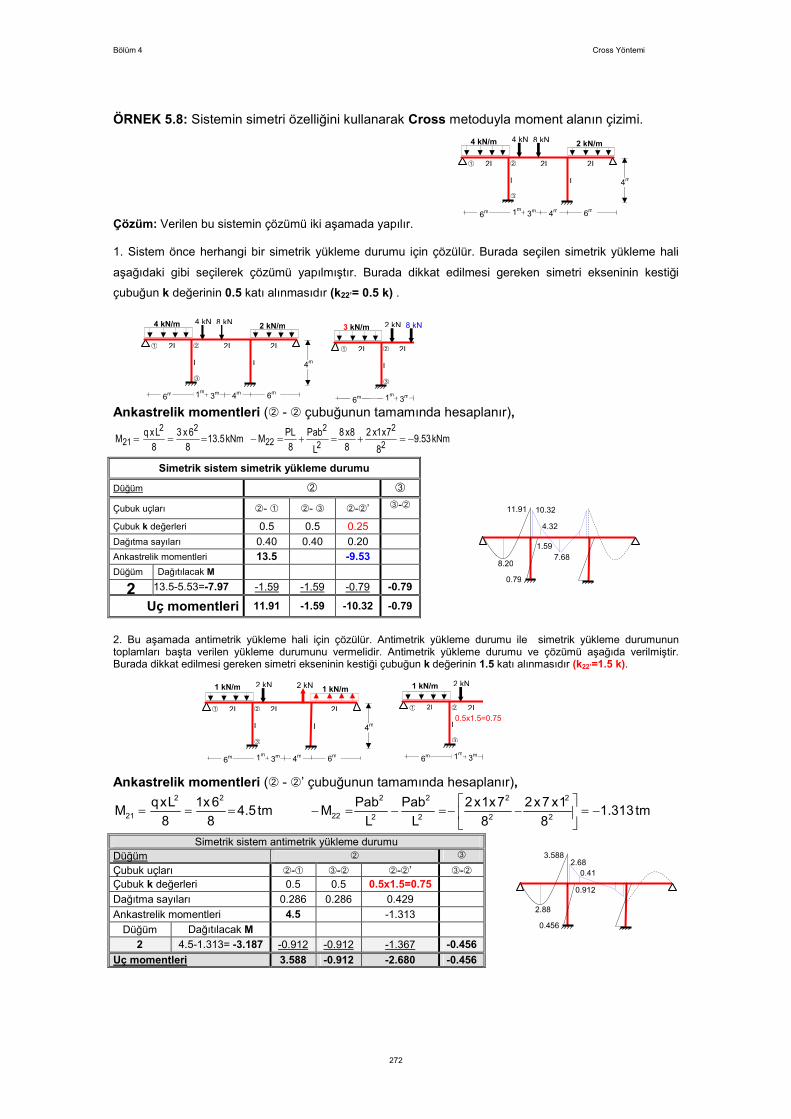
ÖRNEK 5.8: Sistemin simetri özelliğini kullanarak Cross metoduyla moment alanın çizimi. Çözüm: Verilen bu sistemin çözümü iki aşamada yapılır. 1. Sistem önce herhangi bir simetrik yükleme durumu için çözülür. Burada seçilen simetrik yükleme hali
aşağıdaki gibi seçilerek çözümü yapılmıştır. Burada dikkat edilmesi gereken simetri ekseninin kestiği
çubuğun k değerinin 0.5 katı alınmasıdır (k22’= 0.5 k) .
Ankastrelik momentleri (� - � çubuğunun tamamında hesaplanır),
2 2 2 2
21 22 2 2
q xL 3 x 6 PL Pab 8 x8 2 x1x7M 13.5kNm M 9.53kNm
8 8 8 8L 8= = = − = + = + = −
Simetrik sistem simetrik yükleme durumu
Düğüm � �
Çubuk uçları �- � �- � �-�’ �-�
Çubuk k değerleri 0.5 0.5 0.25
Dağıtma sayıları 0.40 0.40 0.20
Ankastrelik momentleri 13.5 -9.53
Düğüm Dağıtılacak M
2 13.5-5.53=-7.97 -1.59 -1.59 -0.79 -0.79
Uç momentleri 11.91 -1.59 -10.32 -0.79
2. Bu aşamada antimetrik yükleme hali için çözülür. Antimetrik yükleme durumu ile simetrik yükleme durumunun toplamları başta verilen yükleme durumunu vermelidir. Antimetrik yükleme durumu ve çözümü aşağıda verilmiştir. Burada dikkat edilmesi gereken simetri ekseninin kestiği çubuğun k değerinin 1.5 katı alınmasıdır (k22’=1.5 k).
Ankastrelik momentleri (� - �’ çubuğunun tamamında hesaplanır),
2 2 2 2 2 2
21 22 2 2 2 2
qxL 1x 6 Pab Pab 2x1x7 2x7 x1M 4.5 tm M 1.313 tm
8 8 L L 8 8
= = = − = − = − − = −
Simetrik sistem antimetrik yükleme durumu Düğüm � �
Çubuk uçları �-� �-� �-�’ �-� Çubuk k değerleri 0.5 0.5 0.5x1.5=0.75
Dağıtma sayıları 0.286 0.286 0.429
Ankastrelik momentleri 4.5 -1.313
Düğüm Dağıtılacak M
2 4.5-1.313= -3.187 -0.912 -0.912 -1.367 -0.456
Uç momentleri 3.588 -0.912 -2.680 -0.456
1 t/ m
6.0 m
4 kN/m 2 kN/m
4m
�
� � 2I
4 kN
6m 1m 6m 3m 4m
8 kN
2I 2I
I I
3 kN/m
4m
�
� � 2I
2 kN
6m 1m 6m 3m 4m
8 kN
2I 2I
I I
4 kN/m 2 kN/m
4m
�
� � 2I
4 kN
6m 1m 6m 3m 4m
8 kN
2I 2I
I I
1 kN/m 1 kN/m
4m
�
� � 2I
2 kN
6m 1m 6m 3m 4m
2 kN
2I 2I
I I
1 kN/m 1 kN/m
4m
�
� � 2I
2 kN
6m 1m 6m 3m 4m
2 kN
2I 2I
I I 0.5x1.5=0.75
0.79
8.20
11.91
1.59
4.32
10.32
7.68
0.456
2.88
3.588
0.912
0.41 2.68
Cross Yöntemi Bölüm 5
273
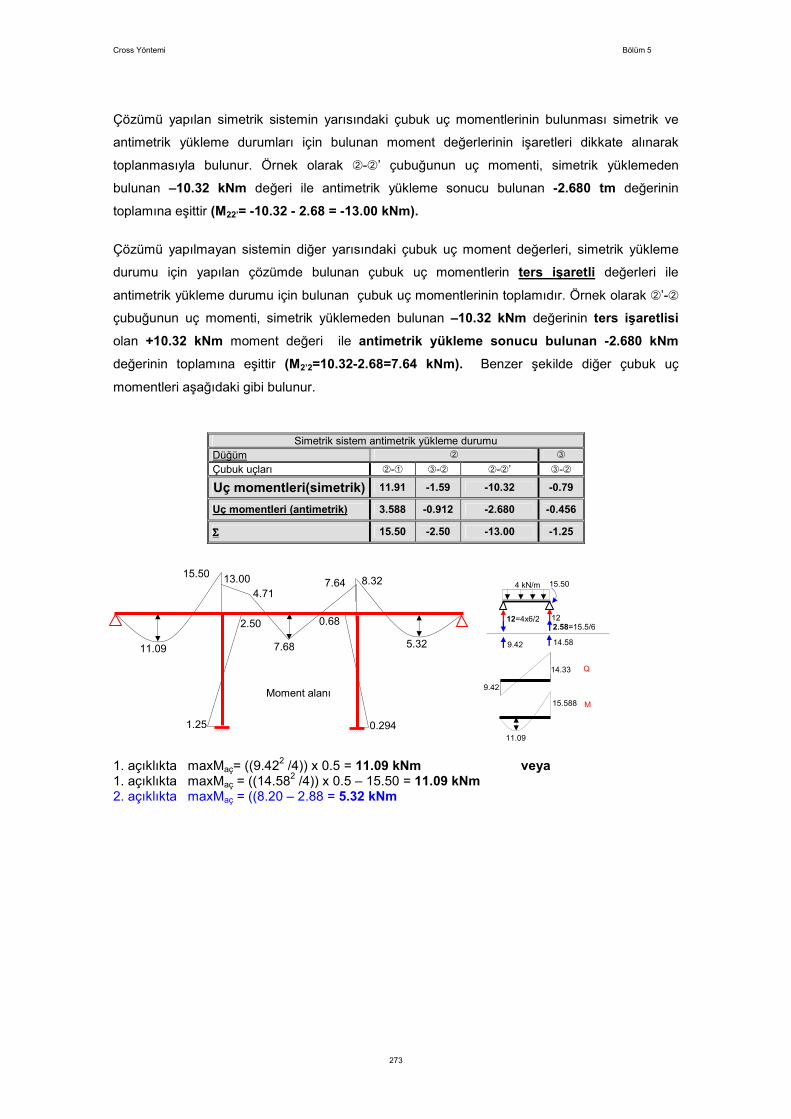
Çözümü yapılan simetrik sistemin yarısındaki çubuk uç momentlerinin bulunması simetrik ve
antimetrik yükleme durumları için bulunan moment değerlerinin işaretleri dikkate alınarak
toplanmasıyla bulunur. Örnek olarak �-�’ çubuğunun uç momenti, simetrik yüklemeden
bulunan –10.32 kNm değeri ile antimetrik yükleme sonucu bulunan -2.680 tm değerinin
toplamına eşittir (M22’= -10.32 - 2.68 = -13.00 kNm).
Çözümü yapılmayan sistemin diğer yarısındaki çubuk uç moment değerleri, simetrik yükleme
durumu için yapılan çözümde bulunan çubuk uç momentlerin ters işaretli değerleri ile
antimetrik yükleme durumu için bulunan çubuk uç momentlerinin toplamıdır. Örnek olarak �’-�
çubuğunun uç momenti, simetrik yüklemeden bulunan –10.32 kNm değerinin ters işaretlisi
olan +10.32 kNm moment değeri ile antimetrik yükleme sonucu bulunan -2.680 kNm
değerinin toplamına eşittir (M2’2=10.32-2.68=7.64 kNm). Benzer şekilde diğer çubuk uç
momentleri aşağıdaki gibi bulunur.
Simetrik sistem antimetrik yükleme durumu Düğüm � �
Çubuk uçları �-� �-� �-�’ �-�
Uç momentleri(simetrik) 11.91 -1.59 -10.32 -0.79
Uç momentleri (antimetrik) 3.588 -0.912 -2.680 -0.456
ΣΣΣΣ 15.50 -2.50 -13.00 -1.25
1. açıklıkta maxMaç= ((9.422 /4)) x 0.5 = 11.09 kNm veya 1. açıklıkta maxMaç = ((14.582 /4)) x 0.5 – 15.50 = 11.09 kNm 2. açıklıkta maxMaç = ((8.20 – 2.88 = 5.32 kNm
7.64
1.25
11.09
15.50 13.00
2.50
7.68
4.71 8.32
0.68
0.294
5.32
Moment alanı
15.50 4 kN/m
12 12=4x6/2 2.58=15.5/6
9.42 14.58
11.09
Q
9.42
14.33
15.588 M

Bölüm 4 Cross Yöntemi
274
5.3. DÜĞÜM NOKTALARI HAREKETLĐ (δδδδ ≠≠≠≠0) SĐSTEMLER
Düğüm noktaları hareketli sistemler 4. bölümde açıklanan kriterleri sağlayan sistemlerdir. Bu sistemlerin Cross yöntemi ile aşağıda maddeler halinde açıklanarak çözümü yapılmıştır. Cross yöntemi ile düğüm noktaları hareketli sistemlerin çözümü;
1. Verilen sistem ilk önce yatay ve/veya düşey hareketler [H10, H20, H30] tutularak düğüm
noktaları sabit sistem haline getirilir.
2. Bu düğüm noktaları sabit sistemin dış yüklerden oluşan moment alanı elde edilir.
3. Düğüm noktaları sabit sistemin moment alanı ve dış yüklerin dikkate alınması suretiyle
yatay denge yazılarak yatay kat kuvvetleri [H10, H20, H30, Hn0] bulunur.
4. Sonra düğüm noktaları sabit sistemin her bir katına birim [δδδδi=1] deplasmanlar verilerek
moment alanı [M1] elde edilir.
5. [M1] alanında yatay denge yazılarak yatay kuvvetler [H11, H12, H13…….. H1n] bulunur.
6. Bu işlem her bir deplasman [δδδδ1, δδδδ2, δδδδ3…….. δδδδn] için birim yükleme yapılarak moment
değerleri elde edildikten sonra yatay denge yazılarak [Hi1, Hi2, Hi3…….. H1n] değerleri
bulunur.
q
q
�
2I 1.5I
P
I I
4.67I
I
�
�
� �
A
B
6.09
H10=6.09/1.5+0.24/7=4.09
H20=[[7.38+5.96]-
[5.59+7.38]]/4+0.24/7=0.13
A
B
5.96
7.38
7.38
5.59 0.24
4x6/2-[12.05+7.38]/6=12.78
4 kN/m
4 kN/m
4 kN
12.42
A
B
6.89
7.38
0.24 7.38
12.05 11.46 0.22
H30=24.46
0.88
0.40
6.21
H11=6.21/1.5+1.46/7=4.35
H21=0.47
A
B
3.11
0.88 0.40
1.46
1.45 0.81 0.88
0.88 3.11
0.21 0.57=[0.81+1.45]/4
H13=0.11
0.67 δ1=1
Đçin çözüm Moment değerleri
H10 H20
q
q
�
2I 1.5I
P
I I
4.67I
I
�
�
� �
A
B
H30 Düğüm noktaları sabit sistem

Cross Yöntemi Bölüm 5
275
7. Bu işlemler ayrıca aşağıdaki tabloda 3 katlı yapı içinde sırası ile elde edilmiştir.
CROSS METODUNDA DÜĞÜM NOKTALARI HAREKETLĐ SĐSTEMLERDE YATAY DENGE
SA
BĐT
SĐS
TE
M
1.
KA
T Y
AT
AY
DE
NG
E
VE
RĐL
EN
ES
AS
SĐS
TE
M
2.
KA
T Y
AT
AY
DE
NG
E
3.
KA
T Y
AT
AY
DE
NG
E
8. Her deplasman ve dış yükler için moment alanlarından elde edilen yatay denge
denklemleri sonucu bulunan [Hi1, Hi2, Hi3…….. H1n] değerleri kullanılarak,
H10 + H11 δδδδ1 + H12 δδδδ2 + H13 δδδδ3 = 0 H20 + H21 δδδδ1 + H22 δδδδ2 + H23 δδδδ3 = 0 H30 + H31 δδδδ1 + H32 δδδδ2 + H33 δδδδ3 = 0 denklemi elde edilir.
9. Bu denklem sistemi çözülerek deplasman değerleri [δδδδ] bulunur. Bu şekilde δδδδ’ların
gerçek değerleri bulunup yerlerine yazılırsa bu H yatay kuvvetlerin sıfır olduğu görülür.
10. Bulunan δδδδ değerleri
Mij = M0 + M1. δδδδ1 + M2. δδδδ2+ M3. δδδδ3.......... Mn. δδδδn
bağıntısında yerine yazılarak sonuç moment alanı elde edilir. Sistemin kesme ve eksenel kuvvet
değerleri için,
1. Dış yüklerden dolayı düğüm noktaları sabit sistemde oluşan [V ve N] alanları çizilir.
2. Sonra düğüm noktaları sabit sistemin her bir katına birim [δδδδi=1] deplasmanlar verilerek
kesme ve eksenel kuvvet alanı [V1 N1] elde edilir.
3. Moment için yapılan bütün işlemlerin aynısı bu kesit tesirleri içinde yapılır.
Sistemin kesme ve eksenel kuvvet değerleri moment için yapılan işlemler aynı yapılarak,
Vij = V0 + V1. δδδδ1 + V2. δδδδ2+ V3. δδδδ3.......... Vn. δδδδn
Nij = N0 + N1. δδδδ1 + N2. δδδδ2+ N3. δδδδ3.......... Nn. δδδδn
bağıntıları ile elde edilir.
Hareketli sistem δ1 ≠ 0 δ2 ≠ 0 δ3 ≠ 0
P2
P1 P3
Hareketsiz sistem δ1= 0 δ2= 0 Mo δ3= 0
P2
P1 P3
H30
H30
H30 δδδδ1 = 1 M1 δδδδ2 = 0 δδδδ3 = 0
δδδδ1
H31
H21
H11
δδδδ1 = 0 M2 δδδδ2 = 1 δδδδ3 = 0
δδδδ22
H32
H12
H22
δδδδ1 = 0 M3 δδδδ2 = 0
δδδδ3 = 1
H32
H13
H33
δδδδ32

Bölüm 4 Cross Yöntemi
276
ÖRNEK 5.9: Şekilde verilen çerçevenin CROSS yöntemiyle moment alanının çizimi. Çözüm: Önce sistem düğüm noktaları sabit sistem haline getirilir, sonra δδδδ=1 için çözüm yapılır.
Đki ucu moment taşıyan çubuklarda2EI
kL
= ve
bir ucu moment taşıyan çubuklarda 3EI
k2L
′ = kısaltması yapılacak olur ise deplasmanlardan
dolayı oluşan çubuk uç momentleri;
��
��
k değeri
ik ki 2
k ' değeri
ik 2
16EI 3 2EI 3k
k çubuklarında olması durumunda M M 12EIL L LLk
L
OLU
13EI 4 3EI 2k
k ' çubuklarında olması durumunda M 13EI3L 2L LLk
2L
δ
δ
δ = − = − = − δ = − ⋅ = − = δ = = δ = − ⋅ = − =
R
Açıklıkta yük olmadığı için (ankastrelik momenti sıfır) dış yüklere göre çözüm yapılmaz ve δδδδ=1
için çözüm yapılarak yatay deplasman bulunur.
I
8 kN
�
� � 2I
I
�
10m
6m
H10=0
Ankastrelik momenti
olmadığı için M0=0 dır.
I
8 kN
�
� � 2I
I
� 17.0
6
333.0x3
L
k3−−−−====−−−−====−−−−
k=0.400
k=0.333 k=0.25
17.06
333.0x3
L
k3−−−−====−−−−====−−−− 0833.0
6
25.0x2
L
k2−−−−====−−−−====−−−−
�
� �
�
δδδδ=1 için çözüm
Deplasmandan [δδδδ] oluşan moment ve kesme
i 2
6EIM
L= δ
' dan oluşan kesme kuvvetle
3
2
r
2
i
i k
6EI 6EI12L L
V VEI
LL
δ
δ
δ + δ = = =
�����������������
_
+
k 2
6EIM
L= δ
δ i k
_
+ i 2 22
6EI 6EI 3EI
2L L LM = − δ + δ = − δ
k 2 2
6EIM 0
LL
6EI= δ − =δ
δ
i
k
i k 3
3EI3EIL
V VL L
δ = = = δ
+ − δ=2i
3EI
LM
Cross Yöntemi Bölüm 5
277
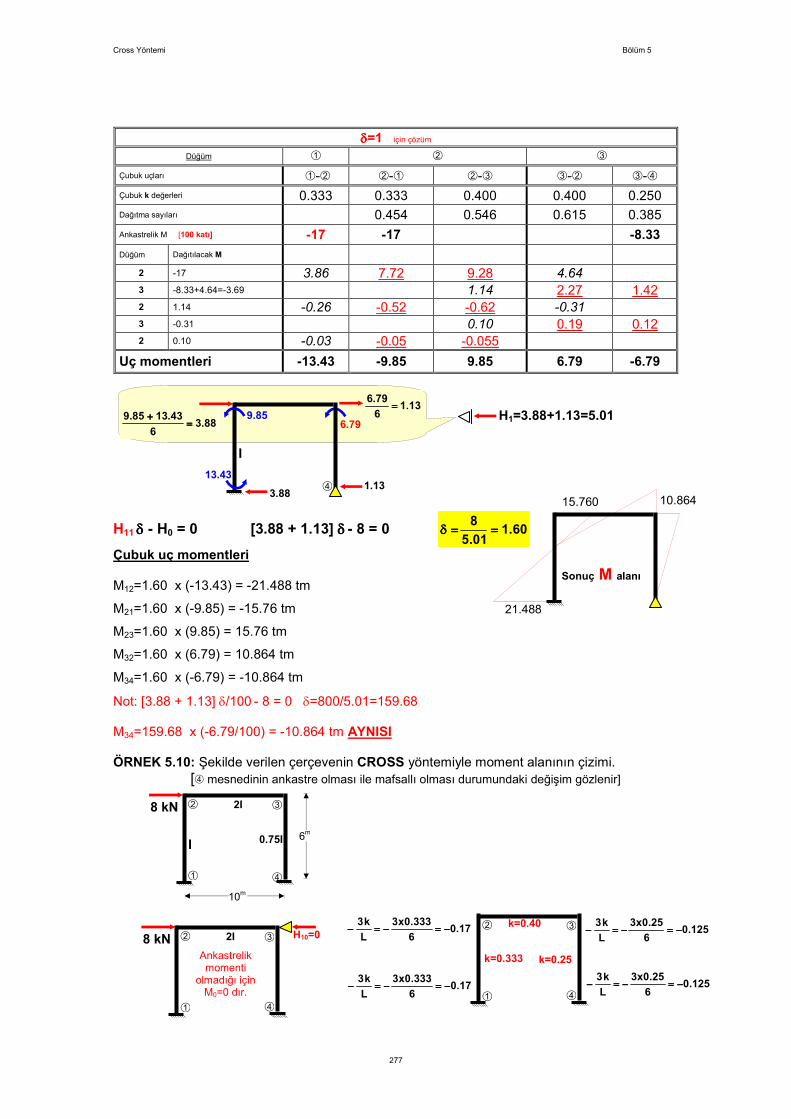
δδδδ=1 için çözüm Düğüm � � �
Çubuk uçları �-� �-� �-� �-� �-� Çubuk k değerleri 0.333 0.333 0.400 0.400 0.250 Dağıtma sayıları 0.454 0.546 0.615 0.385 Ankastrelik M [100 katı] -17 -17 -8.33
Düğüm Dağıtılacak M 2 -17 3.86 7.72 9.28 4.64 3 -8.33+4.64=-3.69 1.14 2.27 1.42 2 1.14 -0.26 -0.52 -0.62 -0.31 3 -0.31 0.10 0.19 0.12 2 0.10 -0.03 -0.05 -0.055
Uç momentleri -13.43 -9.85 9.85 6.79 -6.79
H11 δδδδ - H0 = 0 [3.88 + 1.13] δδδδ - 8 = 0 60.101.5
8========δδδδ
Çubuk uç momentleri
M12=1.60 x (-13.43) = -21.488 tm
M21=1.60 x (-9.85) = -15.76 tm
M23=1.60 x (9.85) = 15.76 tm
M32=1.60 x (6.79) = 10.864 tm
M34=1.60 x (-6.79) = -10.864 tm
Not: [3.88 + 1.13] δ/100 - 8 = 0 δ=800/5.01=159.68 M34=159.68 x (-6.79/100) = -10.864 tm AYNISI ÖRNEK 5.10: Şekilde verilen çerçevenin CROSS yöntemiyle moment alanının çizimi. [� mesnedinin ankastre olması ile mafsallı olması durumundaki değişim gözlenir]
H1=3.88+1.13=5.01
13.43
9.85 13.1
6
79.6====
88.36
43.1385.9====
++++
1.13 3.88
6.79
�
I
Sonuç M alanı
10.864 15.760
21.488
0.75I
8 kN
�
� � 2I
I
�
10m
6m
H10=0
Ankastrelik momenti
olmadığı için M0=0 dır.
8 kN
�
� � 2I
�
k=0.40
k=0.333 k=0.25
17.06
333.0x3
L
k3−−−−====−−−−====−−−−
17.06
333.0x3
L
k3−−−−====−−−−====−−−− 125.0
6
25.0x3
L
k3−−−−====−−−−====−−−−
125.06
25.0x3
L
k3−−−−====−−−−====−−−−
�
� �
�
Bölüm 4 Cross Yöntemi
278
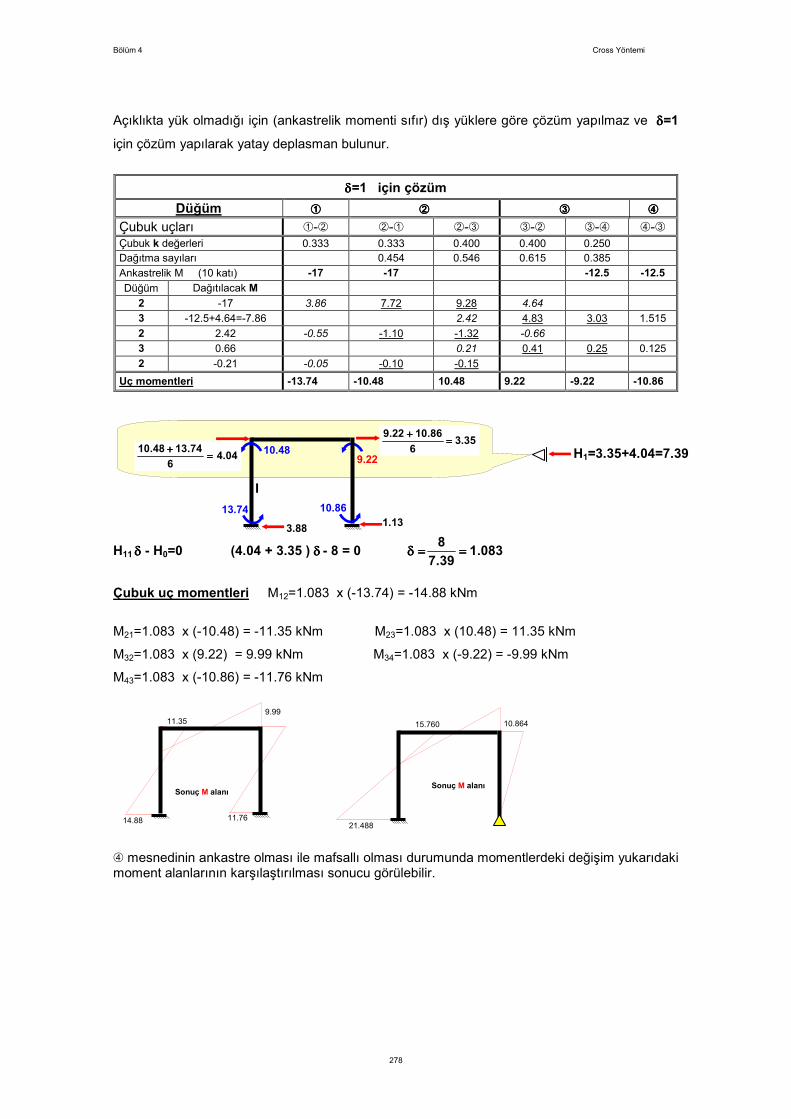
Açıklıkta yük olmadığı için (ankastrelik momenti sıfır) dış yüklere göre çözüm yapılmaz ve δδδδ=1
için çözüm yapılarak yatay deplasman bulunur.
δδδδ=1 için çözüm
Düğüm ���� ���� ���� ���� Çubuk uçları �-� �-� �-� �-� �-� �-� Çubuk k değerleri 0.333 0.333 0.400 0.400 0.250 Dağıtma sayıları 0.454 0.546 0.615 0.385
Ankastrelik M (10 katı) -17 -17 -12.5 -12.5
Düğüm Dağıtılacak M
2 -17 3.86 7.72 9.28 4.64
3 -12.5+4.64=-7.86 2.42 4.83 3.03 1.515
2 2.42 -0.55 -1.10 -1.32 -0.66
3 0.66 0.21 0.41 0.25 0.125
2 -0.21 -0.05 -0.10 -0.15
Uç momentleri -13.74 -10.48 10.48 9.22 -9.22 -10.86
H11 δδδδ - H0=0 (4.04 + 3.35 ) δδδδ - 8 = 0 083.139.7
8========δδδδ
Çubuk uç momentleri M12=1.083 x (-13.74) = -14.88 kNm
M21=1.083 x (-10.48) = -11.35 kNm M23=1.083 x (10.48) = 11.35 kNm
M32=1.083 x (9.22) = 9.99 kNm M34=1.083 x (-9.22) = -9.99 kNm
M43=1.083 x (-10.86) = -11.76 kNm � mesnedinin ankastre olması ile mafsallı olması durumunda momentlerdeki değişim yukarıdaki moment alanlarının karşılaştırılması sonucu görülebilir.
11.76 14.88
Sonuç M alanı
9.99 11.35
Sonuç M alanı
10.864 15.760
21.488
H1=3.35+4.04=7.39
13.74
10.48
1.13 3.88
9.22
I
10.86
04.46
74.1348.10====
++++35.3
6
86.1022.9====
++++
Cross Yöntemi Bölüm 5
279
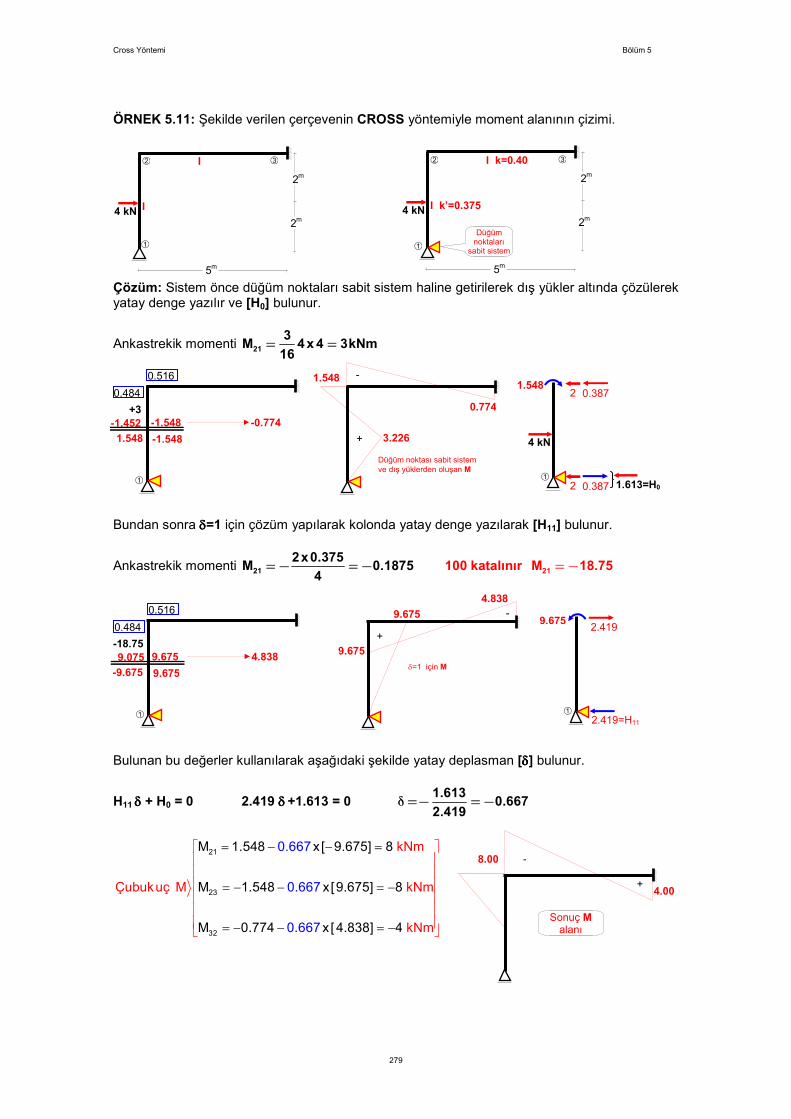
ÖRNEK 5.11: Şekilde verilen çerçevenin CROSS yöntemiyle moment alanının çizimi.
Çözüm: Sistem önce düğüm noktaları sabit sistem haline getirilerek dış yükler altında çözülerek yatay denge yazılır ve [H0] bulunur.
Ankastrekik momenti 21
3M 4 x 4 3kNm
16= =
Bundan sonra δδδδ=1 için çözüm yapılarak kolonda yatay denge yazılarak [H11] bulunur.
Ankastrekik momenti 221 1100 kat2x0.3
alını75
M 0.187 r 755 M 1 .4
8= =−− =−
Bulunan bu değerler kullanılarak aşağıdaki şekilde yatay deplasman [δδδδ] bulunur.
H11 δδδδ + H0 = 0 2.419 δδδδ +1.613 = 0 1.613
0.6672.419
δ =− =−
21
23
32
M 1.548 x[ 9.675] 8
M 1.548 x[9.675] 8
M 0.77
0.667 kNm
Çubukuç M kNm
4 x[ 4.83
0.667
0.6 8 k] 4 Nm67
= − − =
= − − = −
= − −
− =
4 kN I
I �
�
� m
5m
2m
2m
4 kN I k’=0.375
I k=0.40 �
�
� m
5m
2m
2m
Düğüm noktaları
sabit sistem
+3 -1.452
�
0.516
0.484
-1.548
1.548 -1.548
-0.774
-
+
Düğüm noktası sabit sistem ve dış yüklerden oluşan M
1.548
3.226
0.774
4 kN
�
1.548 2 0.387
2 0.387 1.613=H0
-18.75 9.075
�
0.516
0.484
9.675
-9.675 9.675
4.838
�
9.675 2.419
2.419=H11
-
+
δ=1 için M
9.675
9.675
4.838
Sonuç M alanı
8.00 -
+ 4.00

Bölüm 4 Cross Yöntemi
280
ÖRNEK 5.11: Verilen kirişin moment alanını Cross metoduyla çiziniz. (2I=sabit) Çözüm: Sistem daha önce düğüm noktaları sabit sistemler bölümünde çözülmüş ve moment alanı aşağıdaki şekilde bulunmuştu. Bu moment alanından yatay H10 kuvveti aşağıdaki şekilde bulunur. Daha sonra yatay birim yükleme için çözüm yapılarak yatay H11 kuvveti bulunur ve yatay deplasman değeri δδδδ bulunarak M alanı elde edilir.
Düğüm � � � Çubuk uçları 1-� konsol �-1 �-� �-� konsol Çubukların k değerleri 1.00 0.357 Dağıtma sayıları 0.727 0.273 Ankastrelik momentleri -10 -10 Düğüm Dağıtılacak moment 2 -10 3.64 7.27 2.73
6.36 ----- -2.73 2.73 --- -----
11 10H H 0
3.
1.2
03 3.
0
64 0
1
δ
δ
δ =
− =
− =
12
21
23
32
4.01kNm,
3.99 k
M 3.64 1.201x 6.36
M 7.27 1.201x 2.73
M 11.2
Nm
7.99 kNm7 1.201x2.73
M 4 1. 4.00 k2 N0 m01x
= − =
= − =
= − =
+ =
−+
=
−
ÖRNEK 5.12: Çerçevenin moment alanını CROSS metodunu kullanarak çizimi.
Ankastrelik momentleri
M12 = -8 x 4.52 /12 = -13.5 kNm M21 = 8 x 4.52 /12 = 13.5 kNm
M23 = -9.6 x 4.5 x 1.52 / 62 = -2.70 kNm M32 = -9.6 x 1.5 x 4.52 / 62 = 8.10 kNm
2I �
�
�
2 kN/m
3m
8m 2m 2m
1.5I
2 kN/m 2x2x1=4 kNm
k’=0.375 �
�
�
4m
8m
k=1.00
2x2x1=4 kNm 11.27
4
7.27
3.64
8.57
Sonuç M alanı
4
11.27
4
7.27
3.64
8.57
Sonuç M alanı
4
-3k/h=-3x1/3=1
δδδδ1=1 için
-3k/h=-3x1/3=1
7.27
3.64
(3.64+7.27)/3=3.64
(3.64+7.27)/3=3.64
H10=3.64 2.73
2.73
6.36
2.73
6.36
(6.36+2.73)/4=3.03 H11=3.03
(6.36+2.73)/3=3.03
1.5m
9.6 kN
6m
2I
�
I
4I
4.5m
�
�
�
H10
Düğüm noktaları sabit sistem Mo
1.5m
9.6 kN
6m
2I
�
I
4I
4.5m
�
�
�
Cross Yöntemi Bölüm 5
281
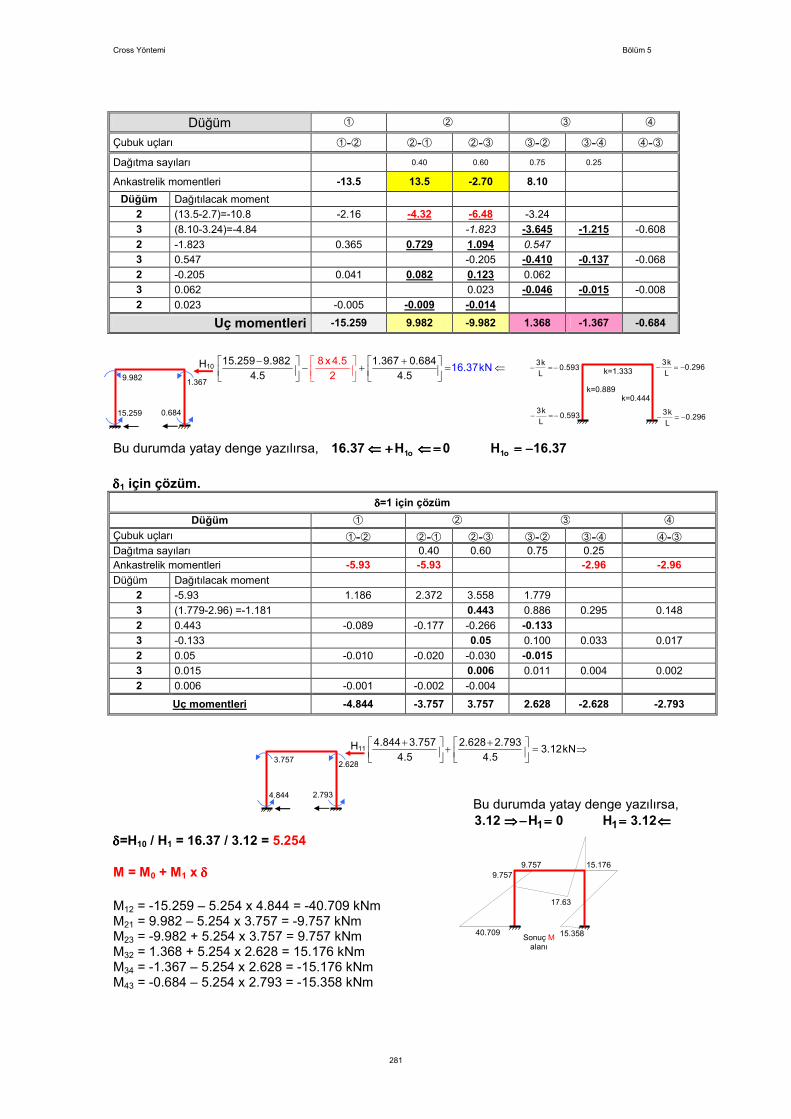
Düğüm � � � �
Çubuk uçları �-� �-� �-� �-� �-� �-�
Dağıtma sayıları 0.40 0.60 0.75 0.25
Ankastrelik momentleri -13.5 13.5 -2.70 8.10
Düğüm Dağıtılacak moment
2 (13.5-2.7)=-10.8 -2.16 -4.32 -6.48 -3.24
3 (8.10-3.24)=-4.84 -1.823 -3.645 -1.215 -0.608
2 -1.823 0.365 0.729 1.094 0.547
3 0.547 -0.205 -0.410 -0.137 -0.068
2 -0.205 0.041 0.082 0.123 0.062
3 0.062 0.023 -0.046 -0.015 -0.008
2 0.023 -0.005 -0.009 -0.014
Uç momentleri -15.259 9.982 -9.982 1.368 -1.367 -0.684
8 x15 4..259 5
2
9.982 1.367 0.684
4.5 4.37kN
516.
− + − + = ⇐
Bu durumda yatay denge yazılırsa, 37.16H0H37.16 o1o1 −−−−========⇐⇐⇐⇐++++⇐⇐⇐⇐ δδδδ1 için çözüm.
δδδδ=1 için çözüm
Düğüm � � � � Çubuk uçları �-� �-� �-� �-� �-� �-� Dağıtma sayıları 0.40 0.60 0.75 0.25 Ankastrelik momentleri -5.93 -5.93 -2.96 -2.96
Düğüm Dağıtılacak moment 2 -5.93 1.186 2.372 3.558 1.779
3 (1.779-2.96) =-1.181 0.443 0.886 0.295 0.148
2 0.443 -0.089 -0.177 -0.266 -0.133
3 -0.133 0.05 0.100 0.033 0.017
2 0.05 -0.010 -0.020 -0.030 -0.015
3 0.015 0.006 0.011 0.004 0.002
2 0.006 -0.001 -0.002 -0.004
Uç momentleri -4.844 -3.757 3.757 2.628 -2.628 -2.793
4.844 3.757 2.628 2.7933.12kN
4.5 4.5
+ + + = ⇒
Bu durumda yatay denge yazılırsa, ⇐⇐⇐⇐========−−−−⇒⇒⇒⇒ 12.3H0H12.3 11
δδδδ=H10 / H1 = 16.37 / 3.12 = 5.254 M = M0 + M1 x δδδδ M12 = -15.259 – 5.254 x 4.844 = -40.709 kNm M21 = 9.982 – 5.254 x 3.757 = -9.757 kNm M23 = -9.982 + 5.254 x 3.757 = 9.757 kNm M32 = 1.368 + 5.254 x 2.628 = 15.176 kNm M34 = -1.367 – 5.254 x 2.628 = -15.176 kNm M43 = -0.684 – 5.254 x 2.793 = -15.358 kNm
1.367
0.684 15.259
9.982
H10
k=0.889
k=1.333
k=0.444
3k0.296
L− = −
3k0.593
L− = −
3k0.593
L− = − 3k
0.296L
− = −
2.628
2.793 4.844
3.757
H11
9.757
15.358 40.709
9.757 15.176
Sonuç M alanı
17.63
Bölüm 4 Cross Yöntemi
282
Düğüm ���� ���� ���� ���� Çubuk uçları �-� �-� �-� �-� �-� �-� Dış yüklerden uç momentleri (M0) -15.259 9.982 -9.982 1.368 -1.367 0.684
δ1 =1 uç momentleri (M1) -4.844 -3.757 3.757 2.628 -2.628 -2.793
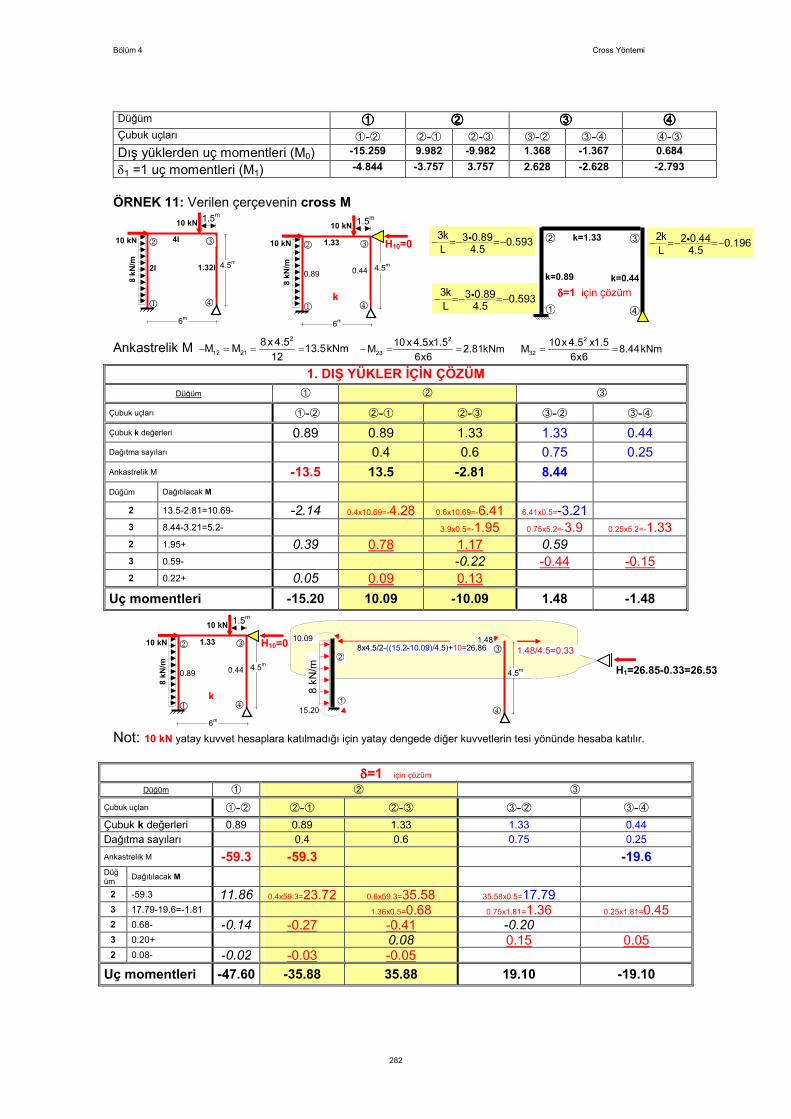
ÖRNEK 11: Verilen çerçevenin cross M
Ankastrelik M 2
12 21
8x 4.5M M 13.5kNm
12− = = =
2 2
23 32
10 x 4.5x1.5 10x 4.5 x1.5M 2.81kNm M 8.44kNm
6x6 6x6− = = = =
1. DIŞ YÜKLER ĐÇĐN ÇÖZÜM Düğüm � � �
Çubuk uçları �-� �-� �-� �-� �-� Çubuk k değerleri 0.89 0.89 1.33 1.33 0.44 Dağıtma sayıları 0.4 0.6 0.75 0.25
Ankastrelik M -13.5 13.5 -2.81 8.44
Düğüm Dağıtılacak M 2 13.5-2.81=10.69- -2.14 0.4x10.69=-4.28 0.6x10.69=-6.41 6.41x0.5=-3.21 3 8.44-3.21=5.2- 3.9x0.5=-1.95 0.75x5.2=-3.9 0.25x5.2=-1.33 2 1.95+ 0.39 0.78 1.17 0.59 3 0.59- -0.22 -0.44 -0.15 2 0.22+ 0.05 0.09 0.13
Uç momentleri -15.20 10.09 -10.09 1.48 -1.48
Not: 10 kN yatay kuvvet hesaplara katılmadığı için yatay dengede diğer kuvvetlerin tesi yönünde hesaba katılır.
δδδδ=1 için çözüm
Düğüm � � � Çubuk uçları �-� �-� �-� �-� �-� Çubuk k değerleri 0.89 0.89 1.33 1.33 0.44 Dağıtma sayıları 0.4 0.6 0.75 0.25
Ankastrelik M -59.3 -59.3 -19.6 Düğüm
Dağıtılacak M 2 -59.3 11.86 0.4x59.3=23.72 0.6x59.3=35.58 35.58x0.5=17.79 3 17.79-19.6=-1.81 1.36x0.5=0.68 0.75x1.81=1.36 0.25x1.81=0.45 2 0.68- -0.14 -0.27 -0.41 -0.20 3 0.20+ 0.08 0.15 0.05 2 0.08- -0.02 -0.03 -0.05
Uç momentleri -47.60 -35.88 35.88 19.10 -19.10
1.5m
6m
1
1.32I
4I
2I
8 k
N/m
10 kN
4.5m
2 3
4
10 kN
2 3 1.33
0.89
k
1.5m
6m
1
0.44
8 k
N/m
10 kN
4.5m
4
10 kN
H10=0 k=1.33
k=0.89 k=0.44
3k 3 0.89 0.593L 4.5
− =− =−i 2k 2 0.44 0.196L 4.5
− =− =−i
�
� �
�
δδδδ=1 için çözüm 3k 3 0.89 0.593L 4.5
− =− =−i
8x4.5/2-((15.2-10.09)/4.5)+10=26.86
�
�
8 k
N/m
15.20
10.09 2 3 1.33
0.89
k
1.5m
6m
1
0.44
8 k
N/m
10 kN
4.5m
4
10 kN
H10=0 3
4.5m
4
1.48/4.5=0.33 1.48
H1=26.85-0.33=26.53
Cross Yöntemi Bölüm 5
283
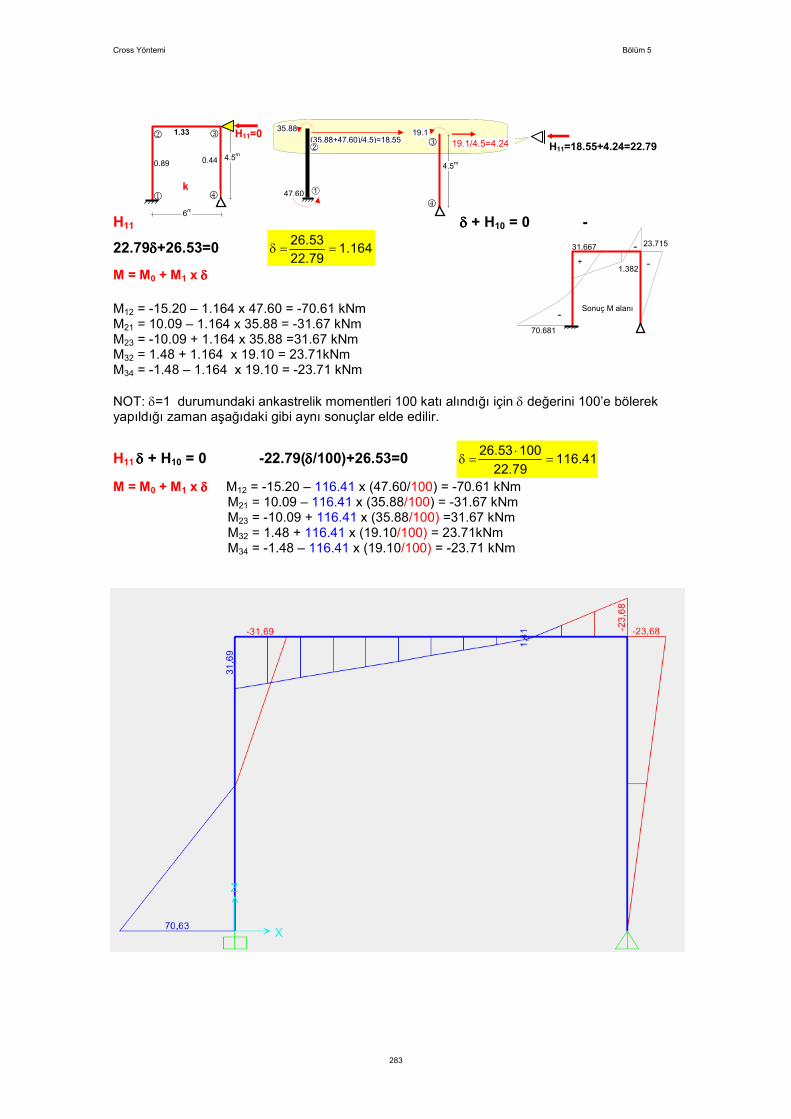
H11 δδδδ + H10 = 0 -
22.79δδδδ+26.53=0 26.53
1.16422.79
δ = =
M = M0 + M1 x δδδδ M12 = -15.20 – 1.164 x 47.60 = -70.61 kNm M21 = 10.09 – 1.164 x 35.88 = -31.67 kNm M23 = -10.09 + 1.164 x 35.88 =31.67 kNm M32 = 1.48 + 1.164 x 19.10 = 23.71kNm M34 = -1.48 – 1.164 x 19.10 = -23.71 kNm NOT: δ=1 durumundaki ankastrelik momentleri 100 katı alındığı için δ değerini 100’e bölerek yapıldığı zaman aşağıdaki gibi aynı sonuçlar elde edilir.
H11 δδδδ + H10 = 0 -22.79(δδδδ/100)+26.53=0 ⋅
δ = =26.53 100
116.4122.79
M = M0 + M1 x δδδδ M12 = -15.20 – 116.41 x (47.60/100) = -70.61 kNm M21 = 10.09 – 116.41 x (35.88/100) = -31.67 kNm M23 = -10.09 + 116.41 x (35.88/100) =31.67 kNm M32 = 1.48 + 116.41 x (19.10/100) = 23.71kNm M34 = -1.48 – 116.41 x (19.10/100) = -23.71 kNm
(35.88+47.60)/4.5)=18.55 �
� 47.60
35.88 2 3 1.33
0.89
k
6m
1
0.44 4.5m
4
H11=0 3
4.5m
4
19.1/4.5=4.24 19.1
H11=18.55+4.24=22.79
Sonuç M alanı
31.667
+
23.715
1.382
70.681
-
-
-

Bölüm 4 Cross Yöntemi
284
ÖRNEK 5.13: Şekildeki çerçevenin moment alanının Cross Yöntemiyle belirlenmesi. Bulunan uç momentlerinden oluşan H yatay kuvveti aşağıdaki şekilde hesaplanır. Yatay denge H = 4 x 3 – 6.82 + 0.675 = 5.855 kN Ankastrelik momentleri, (iki ucu ankastre çubuklarda 6 diğerlerinde 3 ve 100 katı alınmıştır)
12 23 342 2 2
6 100 6 1.2 100 5 3 1.5 100 6.4M 37.5 37.5 M x 36 36 M x 28.8 28.8
4 5 4 5 4
⋅ ⋅ ⋅ δ ⋅ ⋅ δ=− δ=− δ=− = = δ= =− =− δ=−
Sistemin birim yatay yükleme durumunda şekil değiştirme hali, uç momentleri ve yatay denge aşağıdaki gibi elde edilir.
Düğüm � � �
Çubuk uçları �-� �-� �-� �-� �-� Dağıtma sayıları 0.51 0.49 0.58 0.42
Ankastrelik momentleri -4 4 Düğüm Dağıtılacak moment
2 -4 -1.02 -2.04 -1.96 -0.98
3 0.98 0.28 0.57 0.41 3 -0.28 -0.07 -0.14 -0.14 -0.07
2 0.07 0.02 0.04 0.03
Uç momentleri -5.09 1.82 -1.82 -0.44 0.44
1.2I m
� � m
3 k
N/m
I m
1.5I m
� � m
4m
5m 5m
5.0 m 5.0 m
δ
4
5 δ
4
4.6 δ
δ
Ankastrelik momentleri
tm412
4x3MM
2
1221 ========−−−−====
18.52
4x3
4
09.582.1====++++
−−−−
82.62
4x3
4
82.109.5====++++
−−−−
1.82
3 k
N/m
�
m
� m
2I m
5.09
1.82 0.44
452.05
44.082.1====
++++
400.452x5 0.44
H = 0.6754
+= �
0.44 0.452
0.452
Cross Yöntemi Bölüm 5
285
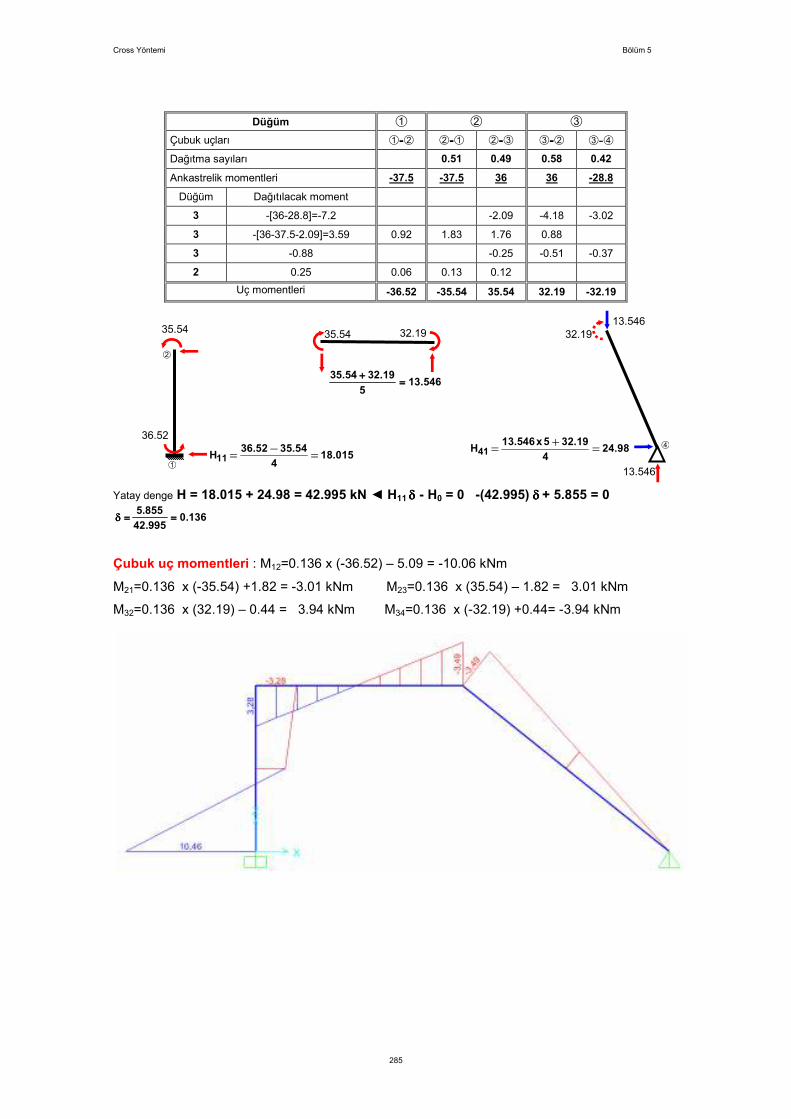
Düğüm � � � Çubuk uçları �-� �-� �-� �-� �-� Dağıtma sayıları 0.51 0.49 0.58 0.42
Ankastrelik momentleri -37.5 -37.5 36 36 -28.8
Düğüm Dağıtılacak moment
3 -[36-28.8]=-7.2 -2.09 -4.18 -3.02
3 -[36-37.5-2.09]=3.59 0.92 1.83 1.76 0.88
3 -0.88 -0.25 -0.51 -0.37
2 0.25 0.06 0.13 0.12
Uç momentleri -36.52 -35.54 35.54 32.19 -32.19
Yatay denge H = 18.015 + 24.98 = 42.995 kN ◄ H11 δδδδ - H0 = 0 -(42.995) δδδδ + 5.855 = 0
136.0995.42
855.5========δδδδ
Çubuk uç momentleri : M12=0.136 x (-36.52) – 5.09 = -10.06 kNm
M21=0.136 x (-35.54) +1.82 = -3.01 kNm M23=0.136 x (35.54) – 1.82 = 3.01 kNm
M32=0.136 x (32.19) – 0.44 = 3.94 kNm M34=0.136 x (-32.19) +0.44= -3.94 kNm
35.54 32.19
546.135
19.3254.35====
++++
4113.546x5 32.19
H 24.984
+= = �
32.19 13.546
13.546
36.52
� m
�
35.54
1136.52 35.54
H 18.0154
−= =

Bölüm 4 Cross Yöntemi
286
ÖRNEK 5.14: Şekildeki çerçevenin moment alanının Cross metoduyla bulunması.
Ankastrelik momentleri tm167.812
7x2Mtm25.2
8
3x2M
2
23
2
21 ========−−−−========
Düğüm � � Çubuk uçları �- � �-3 3-� 3-4 Çubukların k değerleri 0.60 1.143 1.143 0.375 Dağıtma sayıları 0.344 0.656 0.753 0.247 Ankastrelik momentleri 2.25 -8.167 8.167 Düğüm Dağıtılacak moment
3 -8.167 -3.075 -6.150 -2.017
2 -8.167-3.075+2.25=8.992 3.093 5.899 2.949
3 -2.949 -1.110 -2.221 -0.728
2 1.11 0.382 0.728 0.364
3 -0.364 -0.137 -0.274 -0.09
2 0.137 0.047 0.090 0.045
3 -0.045 -0.034 -0.011
Uç momentleri 5.772 5.772 2.846 -2.846
ÖRNEK 5.15: Şekildeki [düğüm noktaları sabit] sistemin moment alanın ve H1 kuvvetinin bulunması.
Ankastrelik momentleri 2
24 42 45 54
30 x6M M M M 90kNm
12− = = − = = =
2 2 0.5 2
56
30 x((3 7.2 ) )M 228.15kNm
8
+− = =
Genel durum için çözüm
Düğüm � � � � Çubuk uçları �- � �- � �- � �-� �-� �-� �-� �-� Dağıtma sayıları 0.238 0.762 0.414 0.172 0.414 0.698 0.302
Ankastrelik momentleri -90 90 -90 90 -228.15 Düğüm Dağıtılacak M
4 -228.15+90=-138.15 48.21 96.43 41.72
2 -90 21.42 68.58 34.29
3 90-90+34.29+48.21=82.5 -7.1 -17.08 -34.16 -14.19 -34.15 -17.08
4 -17.08 5.96 11.92 5.16
2 4.06 13.02 6.51
3 6.51+5.96=12.47 -1.08 -2.58 -5.16 -2.15 -5.16 -2.58
2 -2.58 0.61 1.97 0.98
4 -2.58 0.90 1.80 0.78
3 1.88 -0.16 -0.39 -0.78 -0.32 -0.78 -0.39
2 -0.39 0.09 0.30 0.15
4 0.14 0.27 0.12
3 0.29 -0.06 -0.12 -0.05 -0.12
Uç momentleri -8.36 26.18 -26.18 91.71 -16.71 -75.00 180.37 -180.37
�
�
4 m
2 kN/m
�
�
I
4I 2I
7.0 m
3.0 m
� �
30 kN/m
2I
30 kN/m
2I
4I 4I
3I
� � �
�
7.2m
6m 6m 3m
� �
30 kN/m
2I
30 kN/m
2I
4I 4I
3I
� � �
�
7.2m
6m 6m 3m
H1
Cross Yöntemi Bölüm 5
287
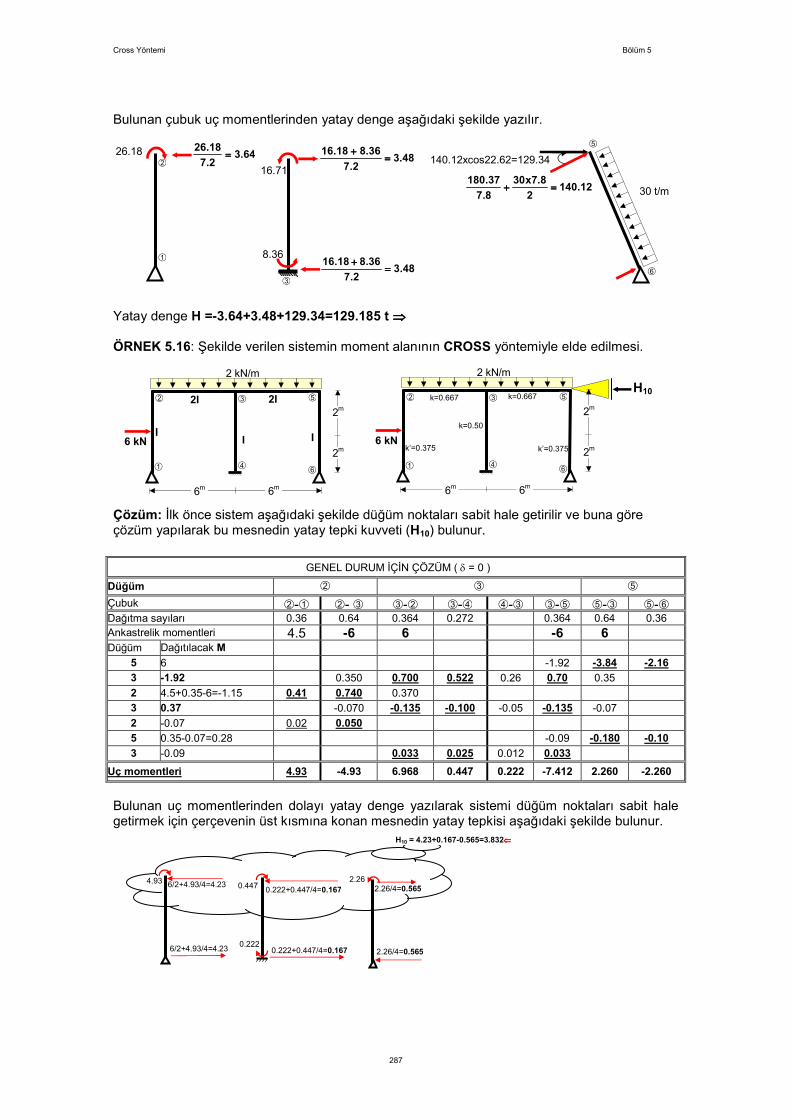
Bulunan çubuk uç momentlerinden yatay denge aşağıdaki şekilde yazılır. Yatay denge H =-3.64+3.48+129.34=129.185 t ⇒⇒⇒⇒ ÖRNEK 5.16: Şekilde verilen sistemin moment alanının CROSS yöntemiyle elde edilmesi. Çözüm: Đlk önce sistem aşağıdaki şekilde düğüm noktaları sabit hale getirilir ve buna göre çözüm yapılarak bu mesnedin yatay tepki kuvveti (H10) bulunur.
GENEL DURUM ĐÇĐN ÇÖZÜM ( δ = 0 )
Düğüm � � � Çubuk �-� �- � �-� �-� �-� �-� �-� �-� Dağıtma sayıları 0.36 0.64 0.364 0.272 0.364 0.64 0.36 Ankastrelik momentleri 4.5 -6 6 -6 6 Düğüm Dağıtılacak M
5 6 -1.92 -3.84 -2.16
3 -1.92 0.350 0.700 0.522 0.26 0.70 0.35
2 4.5+0.35-6=-1.15 0.41 0.740 0.370
3 0.37 -0.070 -0.135 -0.100 -0.05 -0.135 -0.07
2 -0.07 0.02 0.050
5 0.35-0.07=0.28 -0.09 -0.180 -0.10
3 -0.09 0.033 0.025 0.012 0.033
Uç momentleri 4.93 -4.93 6.968 0.447 0.222 -7.412 2.260 -2.260
Bulunan uç momentlerinden dolayı yatay denge yazılarak sistemi düğüm noktaları sabit hale getirmek için çerçevenin üst kısmına konan mesnedin yatay tepkisi aşağıdaki şekilde bulunur.
64.32.7
18.26====
� m
� m
26.18
6 kN
2 kN/m
�
2I
I
�
�
I I m
2I �
�
�
6m 6m
2m
2m k=0.50
k’=0.375 k’=0.375
k=0.667 k=0.667 H10
6 kN
2 kN/m
� �
� �
�
�
6m 6m
2m
2m
16.71
48.32.7
36.818.16====
++++
48.32.7
36.818.16====
++++
�
8.36
�
30 t/m
�
12.1402
8.7x30
8.7
37.180====++++
140.12xcos22.62=129.34
H10 = 4.23+0.167-0.565=3.832⇐⇐⇐⇐
4.93 6/2+4.93/4=4.23
6/2+4.93/4=4.23
2.26 2.26/4=0.565
2.26/4=0.565
0.447 0.222+0.447/4=0.167
0.222 0.222+0.447/4=0.167
Bölüm 4 Cross Yöntemi
288
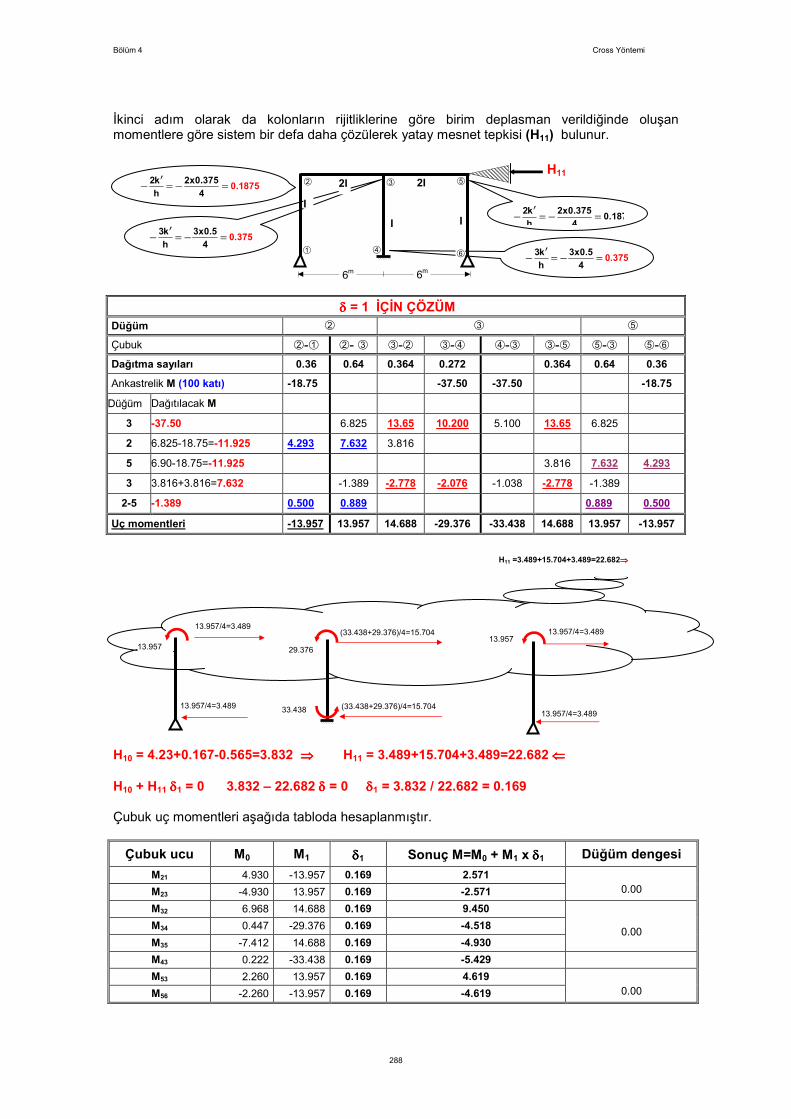
Đkinci adım olarak da kolonların rijitliklerine göre birim deplasman verildiğinde oluşan momentlere göre sistem bir defa daha çözülerek yatay mesnet tepkisi (H11) bulunur.
δδδδ = 1 ĐÇĐN ÇÖZÜM Düğüm � � �
Çubuk �-� �- � �-� �-� �-� �-� �-� �-�
Dağıtma sayıları 0.36 0.64 0.364 0.272 0.364 0.64 0.36
Ankastrelik M (100 katı) -18.75 -37.50 -37.50 -18.75
Düğüm Dağıtılacak M
3 -37.50 6.825 13.65 10.200 5.100 13.65 6.825
2 6.825-18.75=-11.925 4.293 7.632 3.816
5 6.90-18.75=-11.925 3.816 7.632 4.293
3 3.816+3.816=7.632 -1.389 -2.778 -2.076 -1.038 -2.778 -1.389
2-5 -1.389 0.500 0.889 0.889 0.500
Uç momentleri -13.957 13.957 14.688 -29.376 -33.438 14.688 13.957 -13.957
H10 = 4.23+0.167-0.565=3.832 ⇒⇒⇒⇒ H11 = 3.489+15.704+3.489=22.682 ⇐⇐⇐⇐ H10 + H11 δδδδ1 = 0 3.832 – 22.682 δδδδ = 0 δδδδ1 = 3.832 / 22.682 = 0.169 Çubuk uç momentleri aşağıda tabloda hesaplanmıştır.
Çubuk ucu M0 M1 δδδδ1 Sonuç M=M0 + M1 x δδδδ1 Düğüm dengesi
M21 4.930 -13.957 0.169 2.571
M23 -4.930 13.957 0.169 -2.571
0.00
M32 6.968 14.688 0.169 9.450
M34 0.447 -29.376 0.169 -4.518
M35 -7.412 14.688 0.169 -4.930
0.00
M43 0.222 -33.438 0.169 -5.429
M53 2.260 13.957 0.169 4.619
M56 -2.260 -13.957 0.169 -4.619
0.00
3k 3x0.5
h 40.375
′− =− =
2k 2x0.3750.1875
h 4
′− =− =
2k 2x0.375
h 40.1875
′− =− =
3k 3x0.5
h 40.375
′− =− =
H11
�
2I
I
�
�
I I m
2I �
�
�
6m 6m
H11 =3.489+15.704+3.489=22.682⇒⇒⇒⇒
13.957
13.957/4=3.489
13.957/4=3.489
29.376
(33.438+29.376)/4=15.704
33.438 (33.438+29.376)/4=15.704
13.957 13.957/4=3.489
13.957/4=3.489
Cross Yöntemi Bölüm 5
289
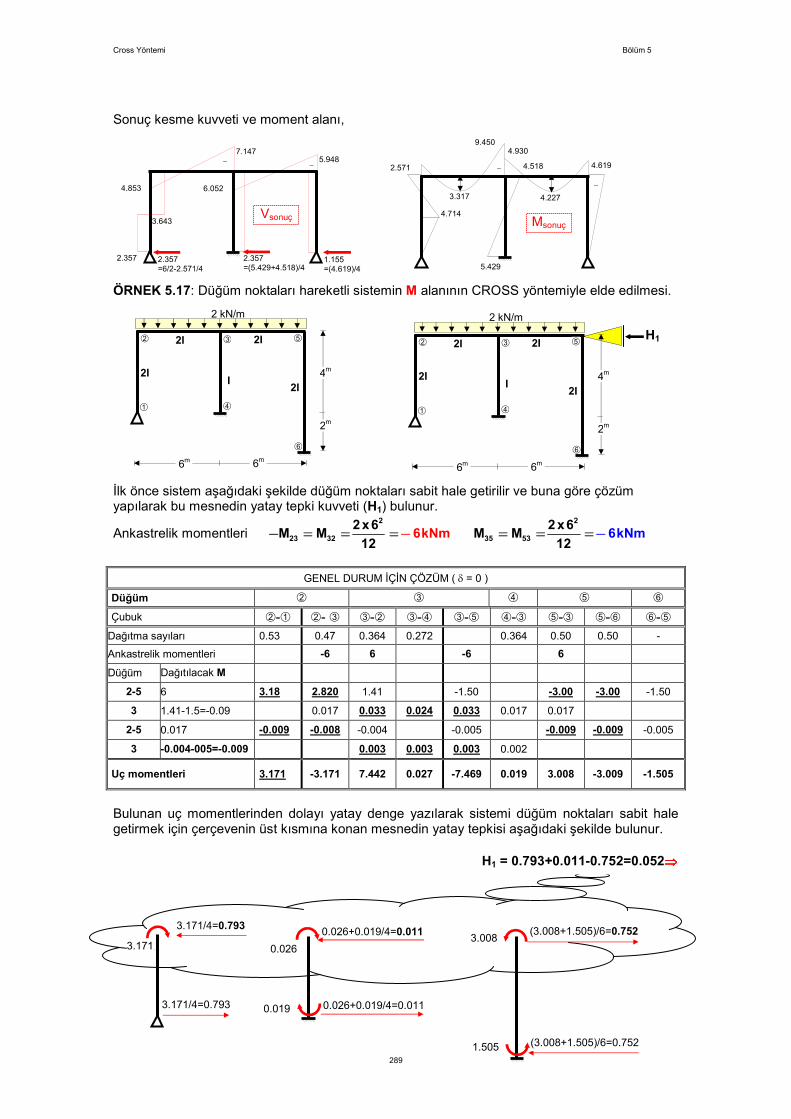
Sonuç kesme kuvveti ve moment alanı, ÖRNEK 5.17: Düğüm noktaları hareketli sistemin M alanının CROSS yöntemiyle elde edilmesi. Đlk önce sistem aşağıdaki şekilde düğüm noktaları sabit hale getirilir ve buna göre çözüm yapılarak bu mesnedin yatay tepki kuvveti (H1) bulunur.
Ankastrelik momentleri 2 2
23 32 35 536kNm 6kNm2 x6 2 x6
M M M M12 12
− = = =−= =−=
GENEL DURUM ĐÇĐN ÇÖZÜM ( δ = 0 )
Düğüm � � � � �
Çubuk �-� �- � �-� �-� �-� �-� �-� �-� �-� Dağıtma sayıları 0.53 0.47 0.364 0.272 0.364 0.50 0.50 -
Ankastrelik momentleri -6 6 -6 6
Düğüm Dağıtılacak M
2-5 6 3.18 2.820 1.41 -1.50 -3.00 -3.00 -1.50
3 1.41-1.5=-0.09 0.017 0.033 0.024 0.033 0.017 0.017
2-5 0.017 -0.009 -0.008 -0.004 -0.005 -0.009 -0.009 -0.005
3 -0.004-005=-0.009 0.003 0.003 0.003 0.002
Uç momentleri 3.171 -3.171 7.442 0.027 -7.469 0.019 3.008 -3.009 -1.505
Bulunan uç momentlerinden dolayı yatay denge yazılarak sistemi düğüm noktaları sabit hale getirmek için çerçevenin üst kısmına konan mesnedin yatay tepkisi aşağıdaki şekilde bulunur.
2 kN/m
�
2I
2I
�
�
I 2I m
2I �
�
�
6m 6m
2m
4m
H1
2 kN/m
�
2I
2I
�
�
I 2I m
2I �
�
�
6m 6m
2m
4m
H1 = 0.793+0.011-0.752=0.052⇒⇒⇒⇒
3.171
3.171/4=0.793
3.171/4=0.793
0.026
0.026+0.019/4=0.011
0.019 0.026+0.019/4=0.011
3.008
1.505
(3.008+1.505)/6=0.752
(3.008+1.505)/6=0.752
−
2.357
3.643
2.357 =6/2-2.571/4
4.853
2.357 =(5.429+4.518)/4
1.155 =(4.619)/4
7.147
6.052
5.948
Vsonuç
−
5.429
4.714
3.317
9.450
2.571 4.619
4.930
Msonuç
4.227
4.518 −
−

Bölüm 4 Cross Yöntemi
290
Đkinci adım olarak da kolonların rijitliklerine göre birim deplasman verildiğinde oluşan momentlere göre sistem bir defa daha çözülerek yatay mesnet tepkisi (H11) bulunur.
GENEL DURUM ĐÇĐN ÇÖZÜM ( δδδδ =1 ) Düğüm � � � � �
Çubuk �-� �- � �-� �-� �-� �-� �-� �-� �-�
Dağıtma sayıları 0.53 0.47 0.364 0.272 0.364 0.364 0.50 0.50 -
Ankastrelik momentleri -375 -375 -375 -335 -335
Düğüm Dağıtılacak M
2-5 -375 198.75 176.25 88.13 83.75 167.5 167.5 83.75
3 88.13+83.75-375 36.97 73.94 55.25 73.94 27.63 36.97
2-5 36.97 -19.59 -17.38 -8.69 -9.24 -18.49 -18.49 -9.24
3 -9.24-8.69=-17.93 3.26 6.53 4.88 6.53 2.44 3.26
2-5 3.26 -1.73 -1.53 -1.63 -1.63 -0.81
Uç momentleri -197.57 197.57 159.91 -314.87 154.98 -344.93 187.61 -187.62 -261.30
H1 = 0.793+0.011-0.752=0.052 ⇐⇐⇐⇐ H11 = 49.39+164.96+112.23=326.58 ⇒⇒⇒⇒ H1 + H11 δδδδ1 = 0 326.58 δδδδ1-0.052 = 0 δδδδ1 = 0.052 / 326.58 = 159.225 10-6
3k 3x0.67
h 60.335
′− =− =
375.04
75.0x2
h
k2====−−−−====
′′′′−−−−
3k 3x0.5
h 40.375
′− =− =
�
2I k=0.667
2I k’=0.275
�
�
I k=0.50
k=0.675 2I
�
�
� 2I k=0.667
3k 3x0.67
h 60.335
′− =− =3k 3x0.5
h 40.375
′− =− =
H11 =49.39+164.96+112.23=326.58⇒⇒⇒⇒
197.57
197.57/4=49.39
197.57/4=49.39
314.87
344.97 (314.57+344.97)/4=164.96
187.52
261.30
(314.57+344.97)/4=164.96
(187.52+261.30)/6=112.23
(187.52+261.30)/6=112.23
Cross Yöntemi Bölüm 5
291
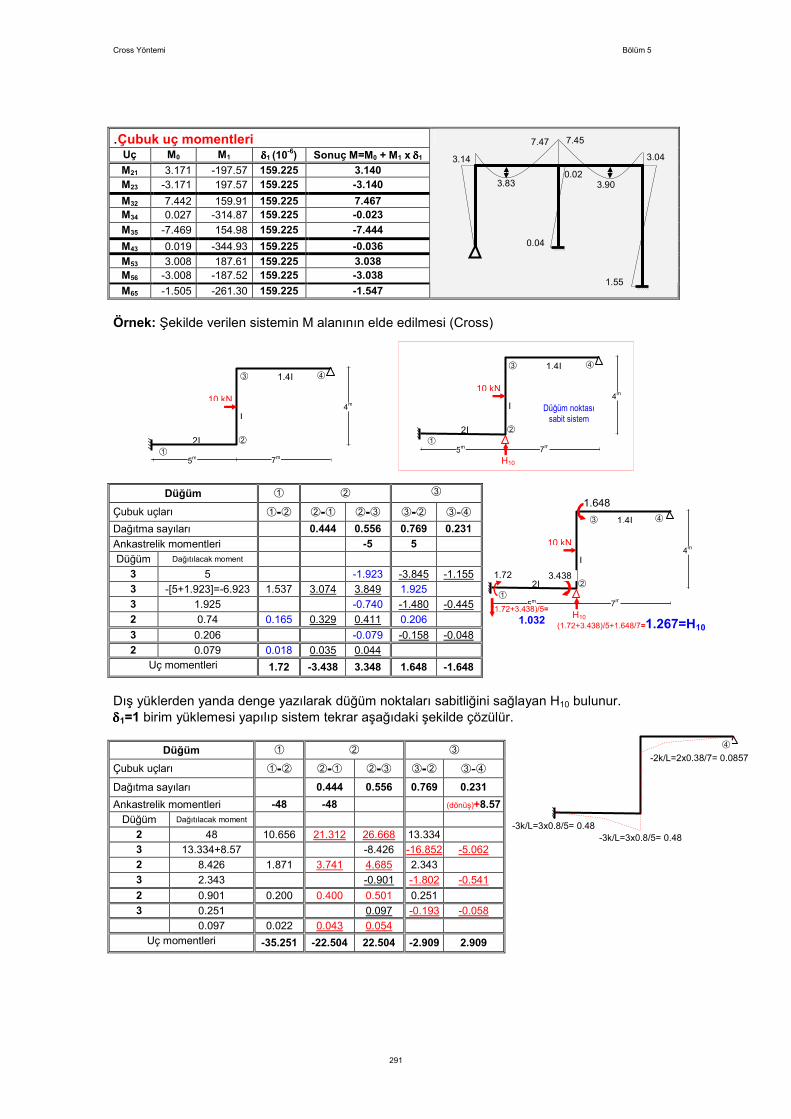
.Çubuk uç momentleri Uç M0 M1 δδδδ1 (10-6) Sonuç M=M0 + M1 x δδδδ1
M21 3.171 -197.57 159.225 3.140 M23 -3.171 197.57 159.225 -3.140
M32 7.442 159.91 159.225 7.467 M34 0.027 -314.87 159.225 -0.023
M35 -7.469 154.98 159.225 -7.444
M43 0.019 -344.93 159.225 -0.036
M53 3.008 187.61 159.225 3.038 M56 -3.008 -187.52 159.225 -3.038
M65 -1.505 -261.30 159.225 -1.547
Örnek: Şekilde verilen sistemin M alanının elde edilmesi (Cross)
Düğüm � � �
Çubuk uçları �-� �-� �-� �-� �-� Dağıtma sayıları 0.444 0.556 0.769 0.231
Ankastrelik momentleri -5 5
Düğüm Dağıtılacak moment
3 5 -1.923 -3.845 -1.155
3 -[5+1.923]=-6.923 1.537 3.074 3.849 1.925
3 1.925 -0.740 -1.480 -0.445
2 0.74 0.165 0.329 0.411 0.206
3 0.206 -0.079 -0.158 -0.048
2 0.079 0.018 0.035 0.044
Uç momentleri 1.72 -3.438 3.348 1.648 -1.648
Dış yüklerden yanda denge yazılarak düğüm noktaları sabitliğini sağlayan H10 bulunur. δδδδ1=1 birim yüklemesi yapılıp sistem tekrar aşağıdaki şekilde çözülür.
Düğüm � � � Çubuk uçları �-� �-� �-� �-� �-� Dağıtma sayıları 0.444 0.556 0.769 0.231
Ankastrelik momentleri -48 -48 (dönüş)+8.57
Düğüm Dağıtılacak moment
2 48 10.656 21.312 26.668 13.334
3 13.334+8.57 -8.426 -16.852 -5.062
2 8.426 1.871 3.741 4.685 2.343
3 2.343 -0.901 -1.802 -0.541
2 0.901 0.200 0.400 0.501 0.251
3 0.251 0.097 -0.193 -0.058
0.097 0.022 0.043 0.054
Uç momentleri -35.251 -22.504 22.504 -2.909 2.909
7.45
3.04 3.14
1.55
0.04
0.02
7.47
3.83 3.90
(1.72+3.438)/5+1.648/7=1.267=H10
2I
5m 7m
4m 10 kN
I
1.4I
� �
� �
H10 (1.72+3.438)/5=
1.032
3.438 1.72
1.648
-3k/L=3x0.8/5= 0.48
�
-3k/L=3x0.8/5= 0.48
-2k/L=2x0.38/7= 0.0857
2I
5m 7m
4m 10 kN
I
1.4I
� �
� � �
2I
5m 7m
4m 10 kN
I
1.4I
� �
�
H10
Düğüm noktası
sabit sistem
Bölüm 4 Cross Yöntemi
292
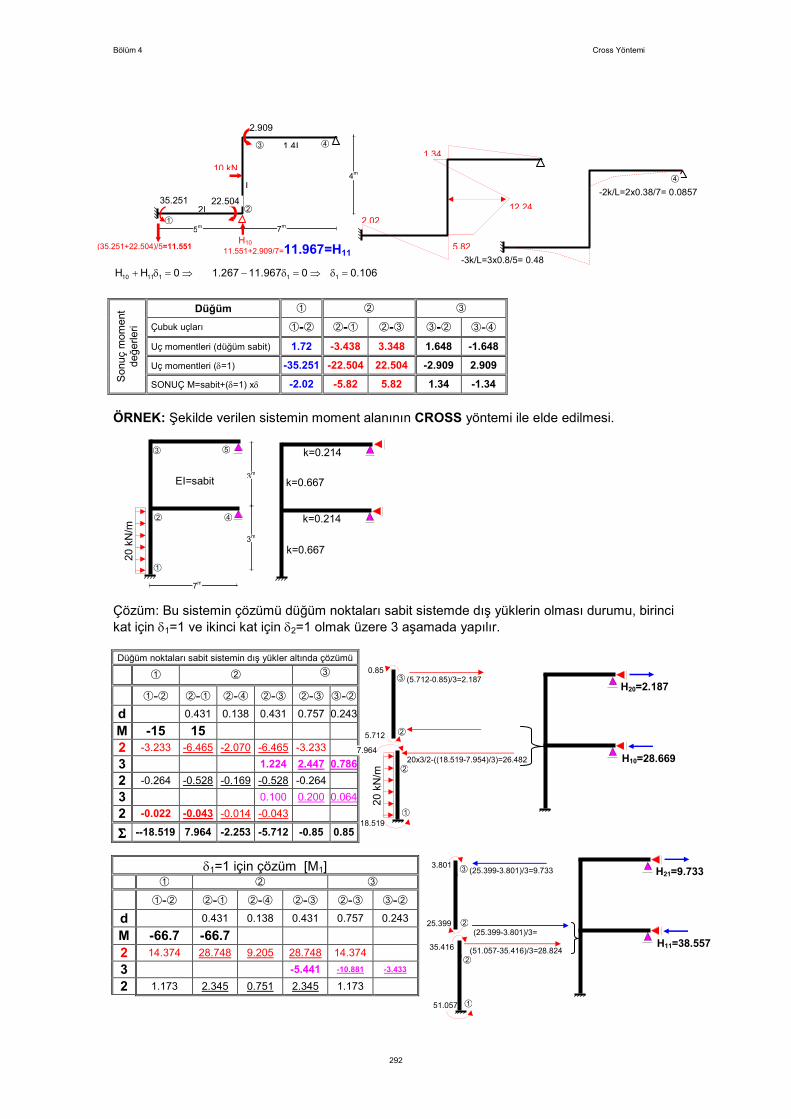
10 11 1 1 1H H 0 1.267 11.967 0 0.106+ δ = ⇒ − δ = ⇒ δ =
Düğüm � � �
Çubuk uçları �-� �-� �-� �-� �-�
Uç momentleri (düğüm sabit) 1.72 -3.438 3.348 1.648 -1.648
Uç momentleri (δ=1) -35.251 -22.504 22.504 -2.909 2.909
Sonuç
mom
ent
değerleri
SONUÇ M=sabit+(δ=1) xδ -2.02 -5.82 5.82 1.34 -1.34
ÖRNEK: Şekilde verilen sistemin moment alanının CROSS yöntemi ile elde edilmesi. Çözüm: Bu sistemin çözümü düğüm noktaları sabit sistemde dış yüklerin olması durumu, birinci kat için δ1=1 ve ikinci kat için δ2=1 olmak üzere 3 aşamada yapılır. Düğüm noktaları sabit sistemin dış yükler altında çözümü
� � �
�-� �-� �-� �-� �-� �-� d 0.431 0.138 0.431 0.757 0.243
M -15 15 2 -3.233 -6.465 -2.070 -6.465 -3.233
3 1.224 2.447 0.786
2 -0.264 -0.528 -0.169 -0.528 -0.264
3 0.100 0.200 0.064
2 -0.022 -0.043 -0.014 -0.043
ΣΣΣΣ --18.519 7.964 -2.253 -5.712 -0.85 0.85
δ1=1 için çözüm [M1]
� � �
�-� �-� �-� �-� �-� �-�
d 0.431 0.138 0.431 0.757 0.243
M -66.7 -66.7 2 14.374 28.748 9.205 28.748 14.374
3 -5.441 -10.881 -3.433
2 1.173 2.345 0.751 2.345 1.173
11.551+2.909/7=11.967=H11
2I
5m 7m
4m 10 kN
I
1.4I
� �
� �
H10 (35.251+22.504)/5=11.551
22.504 35.251
2.909
2.02
5.82
1.34
12.24
�
�
�
�
20 k
N/m
7m
EI=sabit 3m
3m
� k=0.214
k=0.667
k=0.214
k=0.667
H20=2.187
H10=28.669
H21=9.733
H11=38.557
�
� 51.057
35.416 (51.057-35.416)/3=28.824
�
� 25.399
3.801 (25.399-3.801)/3=9.733
(25.399-3.801)/3=
�
�
20 k
N/m
18.519
7.964 20x3/2-((18.519-7.954)/3)=26.482
�
� 5.712
0.85 (5.712-0.85)/3=2.187
�
-3k/L=3x0.8/5= 0.48
-2k/L=2x0.38/7= 0.0857

Cross Yöntemi Bölüm 5
293
-3k/L=3x0.667/3=0.667 0.48
-3k/L=3x0.667/3=0.667
3 -0.444 -0.888 -0.285
2 0.096 0.191 0.061 0.191 0.096
3 -0.072 -0.023
ΣΣΣΣ --51.057 -35.416 10.017 25.399 3.801 -3.801
δ2=1 için çözüm [M2]
� � �
�-� �-� �-� �-� �-� �-� d 0.431 0.138 0.431 0.757 0.243
M -66.7 -66.7 3 25.246 50.492 16.208
2 8.934 17.867 5.721 17.867 8.934
3 -3.382 -6.763 -2.171
2 0.729 1.458 0.467 1.458 0.729
3 -0.276 -0.552 -0.177
2 0.06 0.119 0.038 0.119 0.06
3 -0.045 -0.015
ΣΣΣΣ 9.723 19.444 6.226 -25.668 -13.845 13.845
Yukarıdaki 3 çözümden bulunan değerler kullanılarak,
H10 + H11 δδδδ1 + H12 δδδδ2= 0 -28.669 + 38.557 δδδδ1 -22.893 δδδδ2= 0 H20 + H21 δδδδ1 + H22 δδδδ2 = 0 2.187 - 9.733 δδδδ1 + 13.171 δδδδ2 = 0 denklemi elde edilir. Bu denklemin çözümünden δδδδ1=1.149 ve δδδδ2=0.683 olarak bulunur. Bu
değerler kullanılarak çubuk uç momentleri aşağıda hesaplanarak diyagramı çizilmiştir.
= + +
=− − ⋅ + ⋅ =−
= − ⋅ + ⋅ =−
= + ⋅ + ⋅ =
=− +
δ
⋅ − ⋅ =
=− +
δij o 1 2
12
21
24
23
21
32
M M M M
M 18.519 51.057 9.723 70.55kN
M 7.964 35.416 19.444 19.
1.149
1 45kN
M 2.253 10.017 6.226 13.51kN
M 5.7
0.6
12 25.339 25
83
0.683
0.683
0.683.668 5.94kN
M
.149
1.149
1.14
0.85
9
⋅ − ⋅ =−
= − ⋅ + ⋅ =35
3.801 13.845 5.94kN
M 0
1.1
.85 3.801 13.845
0.683
0.68
49
1.14 39 5.94kN
ÖRNEK: Şekilde verilen sistemin moment alanının CROSS yöntemi ile elde edilmesi.(Konsollar 1.2m, Tekil yükler sol tarafa
H20
H10
k=0.40
k=8
k=0.5
k=0.40
k=8
k=0.5
�
� 9.723
19.444 (19.444-9.723)/3=9.722
�
� 25.668
13.845 (25.668-13.845)/3=13.171
H22=13.171
H12=22.893
(25.668-13.845)/3=13.171
1.93 kN
5.94
19.45 5.94
13.51
70.55
0.85 kN
2.78 kN
60 kN
Sonuç M alanı
-3k/L=3x0.667/3=0.667
-3k/L=3x0.667/3=0.667
2.613 kN/m 7.63 kN
1.552 kN/m
2.013 kN/m 6.9 kN
1.132 kN/m
3m
3m
� �
� �
A 7m 1.2m

Bölüm 4 Cross Yöntemi
294
Çözüm: Sistem düğüm noktaları hareketli olduğu için önce düğüm noktası sabit hala getirilerek
çubuk uç momentleri [M0] bulunur. Kolon uç momentlerinden kolonların karşıladığı kesme
kuvveti ve yatay denge yazılarak kat yatay kuvvetleri [H10, H20] belirlenir.
Konsol 1 2 Konsol 3 4
�-A �-� �-� A-� �-� �-� �-B B- � �-� �-� �-� �-� d 0.488 0.024 0.488 0.286 0.357 0.357 0.95 0.05 0.444 0.556
M -1.88 -25.86 29.91 -1.45 -20.51 24.36 2 -4.277 -8.554 -10.678 -10.678 -5.339 -5.339
1 15.624 0.768 15.624 7.812 0.384 7.812 4 -4.288 -4.223 -8.445 -10.576
3 8.726 17.452 0.919 0.459 1 -4.258 -0.209 -4.258 -2.129 -0.105 -2.129 2 0.573 1.147 1.431 1.431 0.716 0.716
3 1.011 2.022 0.106 0.053
4 -0.341 -0.273 -0.545 -0.683
1 -0.773 -0.038 -0.773 -0.386 -0.019 -0.376
3 0.308 0.617 0.032 0.016
2 0.051 0.103 0.129 0.129 0.064 0.064
1 -0.175 -0.009 -0.175 -0.088 -0.088
4 -0.018 -0.036 -0.045
3 0.101 0.005
ΣΣΣΣ -1.88 10.418 -29.001 20.463 5.209 22.866 -13.747 -9.118 -4.559 -1.45 4.901 -3.452 15.862 -15.863
Düğüm noktaları sabit sistemde dış yüklerden dolayı oluşan yatay kuvvetler [H10, H20] aşağıdaki şekilde hesaplanır.
δδδδ1=1 için çözüm
Konsol 1 2 Konsol 3 4
�-A �-� �-� A-� �-� �-� �-B B- � �-� �-� �-� �-� d 0.488 0.024 0.488 0.286 0.357 0.357 0.95 0.05 0.444 0.556
M -60 -60 -3.75 -3.75
1 29.28 1.44 29.28 14.64 0.72 14.64
3 -6.954 -13.908 -0.732 -0.366
2 0.433 0.887 1.082 1.082 0.541 1.210
1 3.182 0.157 3.182 1.591 0.078 1.591
3 -0.756 -1.511 -0.080 -0.04
4 -0.224 -0.179 -0.357 -0.447
1 0.369 0.018 0.369 0.184 0.009 0.184
2 0.039 0.049 0.049 0.025
ΣΣΣΣ -27.169 2.048 25.121 -43.585 1.733 0.907 -2.619 -3.184 0.996 -0.991 -0.763 0.763
4.901
20.463
10.418
5.219
15.862
13.747
9.118
4.559
H20
H10
4.901
20.463
10.418
5.219
15.863
13.747
9.118
4.559
6.341 =[4.901+20.463]/4
6.341 3.909
3.909
7.403
7.403 3.419
3.419
+ =
H20=1.062
H10=1.552

Cross Yöntemi Bölüm 5
295
δδδδ1=1 için çözüm sonucu bulunan momentlerden yatay kuvvetler [H11, H12] hesaplanır.
δδδδ2=1 için çözüm
Konsol 1 2 Konsol 3 4
�-A �-� �-� A-� �-� �-� �-B B- � �-� �-� �-� �-� d 0.488 0.024 0.488 0.286 0.357 0.357 0.95 0.05 0.444 0.556
M -60 -3.75 -60 -3.75
1 29.28 1.44 29.28 14.64 0.72 14.64
3 21.546 43.092 2.268 1.134
2 0.433 0.887 1.082 1.082 0.541 0.541
1 -10.726 -0.527 -10.726 -5.363 -0.264 -5.363
4 0.577 0.461 0.921 1.154
3 2.328 4.657 0.245 0.123
1 -1.136 -0.056 -1.136 -0.568 -0.028 -0.568
3 0.270 0.540 0.028 0.014
4 -0.038 -0.061 -0.076
1 -0.132 -0.006 -0.132 -0.066 -0.003
2 -0.069 -0.086 -0.086 -0.043
Σ 17.286 1.284 -18.57 8.643 1.243 -2.215 0.996 0.498 -3.002 3.002 2.131 -2.131
δδδδ2=1 için çözümünde bulunan momentlerden yatay kuvvetler [H21, H22] hesaplanır.
H10 + H11 δδδδ1 + H12 δδδδ2 + H13 δδδδ3 ……+ H1n δδδδn = 0 H20 + H21 δδδδ1 + H22 δδδδ2 + H23 δδδδ3 ……+ H2n δδδδn = 0 :: :: :: :: :: :: Hn0 + Hn1 δδδδ1 + Hn2 δδδδ2 + Hn3 δδδδ3 ……+ Hnn δδδδn = 0 Denklemi yazılarak δδδδ’lar aşağıdaki tablodaki bulunur.
ΣΣΣΣX1 = H10 H11δδδδ1 H12δδδδ2 = 0 1.552 -26.093δδδδ1 -13.336δδδδ2 = 0 δδδδ1 = 0.10631
ΣΣΣΣX2 = H20 H21δδδδ1 H22δδδδ2 = 0 -1.062 6.947δδδδ1 -6.480δδδδ2 = 0 δδδδ2 = 0.0549
3.002
18.570
17.286
8.643
2.131
2.215
0.996
0.498
H22
H12
5.393
5.393 6.482
6.482
1.087
1.087 0.374
0.374
+ =
H22=6.480
H12=13.336
δδδδ2=1 için çözüm
3.002
18.570
17.286
8.643
2.131
2.215
0.996
0.498
0.996
25.121
27.169
43.585
0.763
0.907
2.619
3.184
H21
H11
6.529 =[0.996+25.121]/4
6.529 17.695
17.695
0.418
0.418 1.451
1.451
+ =
H21=6.947
H11=26.093
0.996
25.121
27.169
43.585
0.763
0.907
2.619
3.184
δδδδ1=1 için çözüm
Bölüm 4 Cross Yöntemi
296
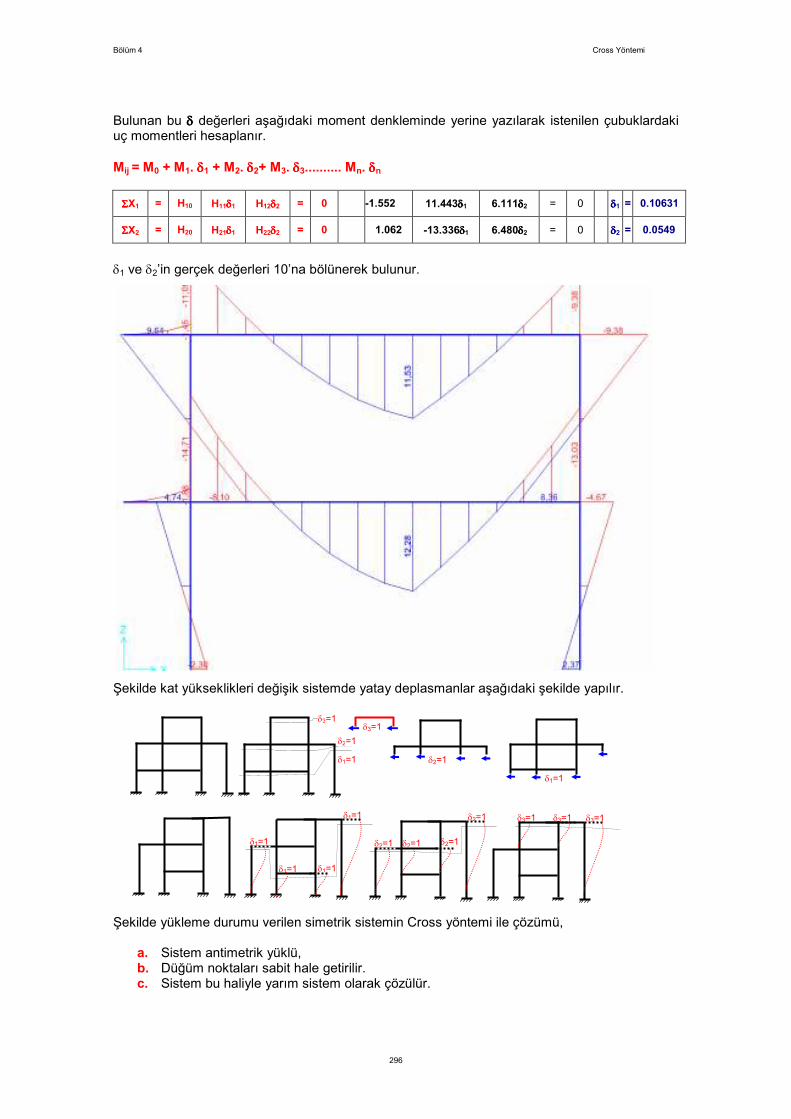
Bulunan bu δδδδ değerleri aşağıdaki moment denkleminde yerine yazılarak istenilen çubuklardaki uç momentleri hesaplanır. Mij = M0 + M1. δδδδ1 + M2. δδδδ2+ M3. δδδδ3.......... Mn. δδδδn
ΣΣΣΣX1 = H10 H11δδδδ1 H12δδδδ2 = 0 -1.552 11.443δδδδ1 6.111δδδδ2 = 0 δδδδ1 = 0.10631
ΣΣΣΣX2 = H20 H21δδδδ1 H22δδδδ2 = 0 1.062 -13.336δδδδ1 6.480δδδδ2 = 0 δδδδ2 = 0.0549
δ1 ve δ2’in gerçek değerleri 10’na bölünerek bulunur.
Şekilde kat yükseklikleri değişik sistemde yatay deplasmanlar aşağıdaki şekilde yapılır. Şekilde yükleme durumu verilen simetrik sistemin Cross yöntemi ile çözümü,
a. Sistem antimetrik yüklü, b. Düğüm noktaları sabit hale getirilir. c. Sistem bu haliyle yarım sistem olarak çözülür.
δ2=1
δ1=1
δ3=1 δ3=1
δ2=1
δ1=1
δ1=1
δ1=1 δ1=1
δ1=1
δ2=1
δ2=1 δ2=1 δ2=1
δ3=1 δ3=1 δ3=1
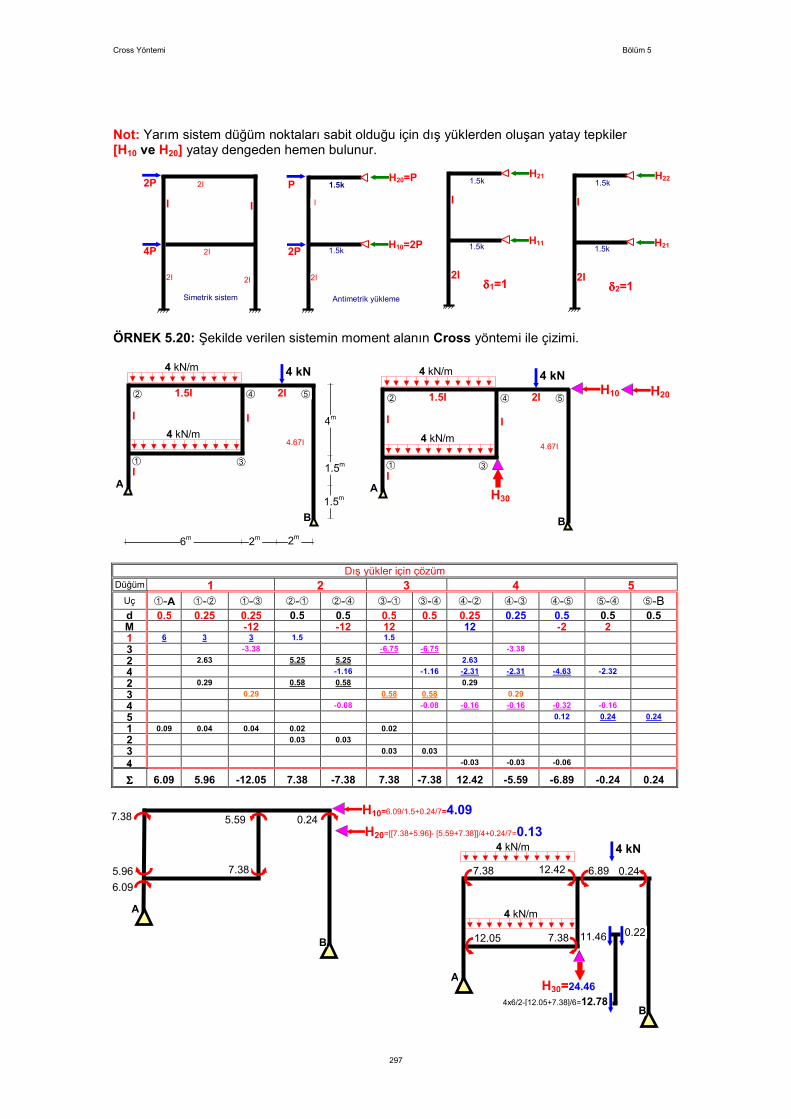
Cross Yöntemi Bölüm 5
297
Not: Yarım sistem düğüm noktaları sabit olduğu için dış yüklerden oluşan yatay tepkiler [H10 ve H20] yatay dengeden hemen bulunur. ÖRNEK 5.20: Şekilde verilen sistemin moment alanın Cross yöntemi ile çizimi.
Dış yükler için çözüm Düğüm 1 2 3 4 5
Uç �-A �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-B d 0.5 0.25 0.25 0.5 0.5 0.5 0.5 0.25 0.25 0.5 0.5 0.5 M -12 -12 12 12 -2 2 1 6 3 3 1.5 1.5
3 -3.38 -6.75 -6.75 -3.38
2 2.63 5.25 5.25 2.63
4 -1.16 -1.16 -2.31 -2.31 -4.63 -2.32
2 0.29 0.58 0.58 0.29
3 0.29 0.58 0.58 0.29
4 -0.08 -0.08 -0.16 -0.16 -0.32 -0.16
5 0.12 0.24 0.24
1 0.09 0.04 0.04 0.02 0.02
2 0.03 0.03
3 0.03 0.03
4444 -0.03 -0.03 -0.06
ΣΣΣΣ 6.09 5.96 -12.05 7.38 -7.38 7.38 -7.38 12.42 -5.59 -6.89 -0.24 0.24
6.09
H10=6.09/1.5+0.24/7=4.09
H20=[[7.38+5.96]- [5.59+7.38]]/4+0.24/7=0.13
A
B
5.96
7.38
7.38
5.59 0.24
4x6/2-[12.05+7.38]/6=12.78
4 kN/m
4 kN/m
4 kN
12.42
A
B
6.89
7.38
0.24 7.38
12.05 11.46 0.22
H30=24.46
4 kN/m
4 kN/m
�
2I 1.5I
4 kN
2m 2m 6m
1.5m
1.5m
4mI I
4.67I
I
�
�
� �
A
B
H10 H20
4 kN/m
4 kN/m
�
2I 1.5I
4 kN
I I
4.67I
I
�
�
� �
A
B
H30
4P
I I
2I
2I
2P 2I
2I
Simetrik sistem
2P
I
2I
P
1.5k
H20=P
H10=2P
1.5k
Antimetrik yükleme
I
2I
1.5k
H21
H11
1.5k
δδδδ1=1
I
2I
1.5k
H22
H21
1.5k
δδδδ2=1
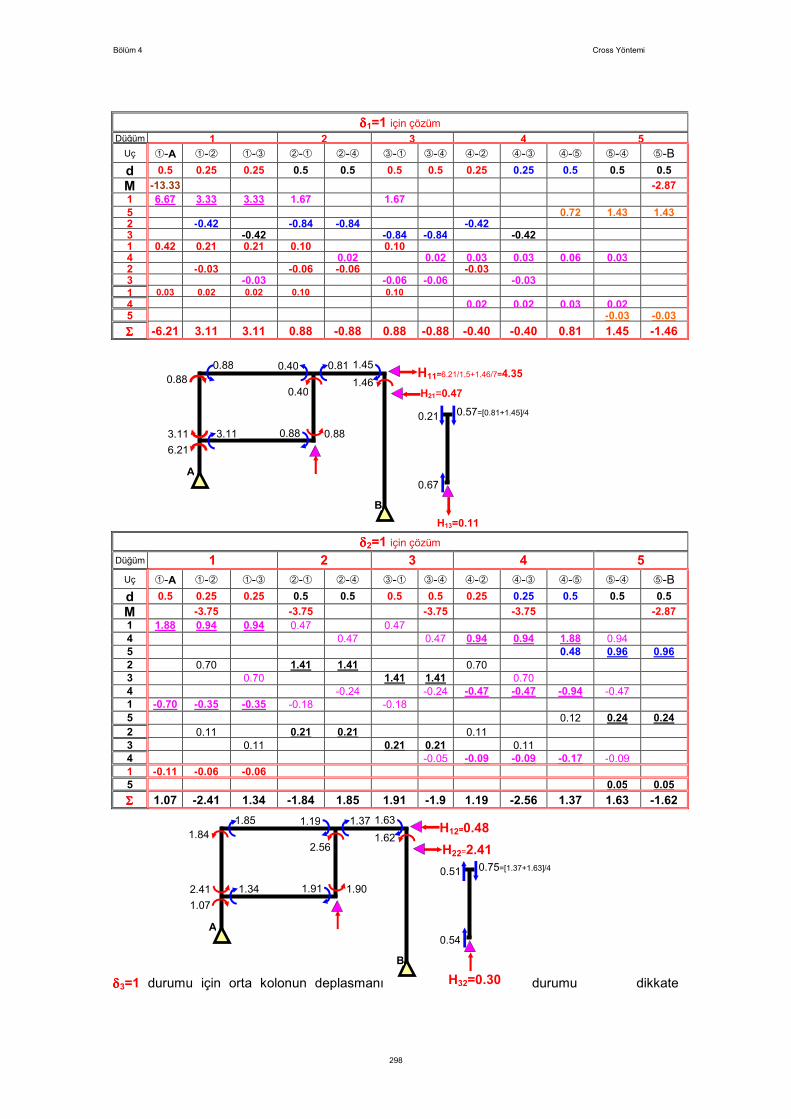
Bölüm 4 Cross Yöntemi
298
δδδδ1=1 için çözüm Düğüm 1 2 3 4 5
Uç �-A �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-B
d 0.5 0.25 0.25 0.5 0.5 0.5 0.5 0.25 0.25 0.5 0.5 0.5
M -13.33 -2.87 1 6.67 3.33 3.33 1.67 1.67 5 0.72 1.43 1.43 2 -0.42 -0.84 -0.84 -0.42 3 -0.42 -0.84 -0.84 -0.42 1 0.42 0.21 0.21 0.10 0.10 4 0.02 0.02 0.03 0.03 0.06 0.03 2 -0.03 -0.06 -0.06 -0.03 3 -0.03 -0.06 -0.06 -0.03 1 0.03 0.02 0.02 0.10 0.10 4 0.02 0.02 0.03 0.02 5 -0.03 -0.03
ΣΣΣΣ -6.21 3.11 3.11 0.88 -0.88 0.88 -0.88 -0.40 -0.40 0.81 1.45 -1.46
δδδδ2=1 için çözüm Düğüm 1 2 3 4 5
Uç �-A �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-B
d 0.5 0.25 0.25 0.5 0.5 0.5 0.5 0.25 0.25 0.5 0.5 0.5
M -3.75 -3.75 -3.75 -3.75 -2.87 1 1.88 0.94 0.94 0.47 0.47 4 0.47 0.47 0.94 0.94 1.88 0.94 5 0.48 0.96 0.96 2 0.70 1.41 1.41 0.70 3 0.70 1.41 1.41 0.70 4 -0.24 -0.24 -0.47 -0.47 -0.94 -0.47 1 -0.70 -0.35 -0.35 -0.18 -0.18 5 0.12 0.24 0.24 2 0.11 0.21 0.21 0.11 3 0.11 0.21 0.21 0.11 4 -0.05 -0.09 -0.09 -0.17 -0.09 1 -0.11 -0.06 -0.06 5 0.05 0.05
ΣΣΣΣ 1.07 -2.41 1.34 -1.84 1.85 1.91 -1.9 1.19 -2.56 1.37 1.63 -1.62
δδδδ3=1 durumu için orta kolonun deplasmanı durumu dikkate
0.88
0.40
6.21
H11=6.21/1.5+1.46/7=4.35
H21=0.47
A
B
3.11
0.88 0.40
1.46
1.45 0.81 0.88
0.88 3.11
0.21 0.57=[0.81+1.45]/4
H13=0.11
0.67
1.90
1.19
1.07
H12=0.48
H22=2.41
A
B
2.41
1.842.56
1.62
1.631.371.85
1.911.34
0.51 0.75=[1.37+1.63]/4
H32=0.30
0.54

Cross Yöntemi Bölüm 5
299
alındığında saat dönüş yönü artı tersi ise eksi olarak kabul edilmiş ve ankastrelik momentleri buna göre bulunmuştur.
δδδδ3=1 için çözüm Düğüm 1 2 3 4 5
Uç �-A �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-B d 0.5 0.25 0.25 0.5 0.5 0.5 0.5 0.25 0.25 0.5 0.5 0.5
M -2.5 -2.5 -2.5 -2.5 7.5 7.5 5 -1.88 -3.75 -3.75
4 -0.39 -0.39 -0.78 -0.78 -1.56 -0.78
3 0.72 1.45 1.45 0.72
2 0.72 1.45 1.45 0.72
1 0.53 0.27 0.27 0.13 0.13
4 -0.18 -0.18 -0.36 -0.36 -0.72 -0.36
5 0.29 0.57 0.57
2 0.02 0.03 0.03 0.01
3 0.02 0.03 0.03 0.01
4 -0.04 -0.04 -0.08 -0.08 -0.16 -0.08
5 0.04 0.04
2 0.01 0.02 0.02
3 0.01 0.02 0.02
1 -0.03 -0.02 -0.02
ΣΣΣΣ 0.5 1.00 -1.5 1.63 -1.61 -0.87 0.89 -2.99 -0.49 3.47 3.14 -3.14
ΣΣΣΣX1 = H10 H11δδδδ1 H12δδδδ2 H13δδδδ3 = 0 -4.09 0.12δδδδ1 -0.48δδδδ2 0.12δδδδ3 = 0 δδδδ1 = 40.15
ΣΣΣΣX2 = H20 H21δδδδ1 H22δδδδ2 H23δδδδ3 = 0 -0.13 -0.31δδδδ1 2.41δδδδ2 -0.31δδδδ3 = 0 δδδδ2 = 9.14
ΣΣΣΣX2 = H30 H31δδδδ1 H32δδδδ2 H33δδδδ3 = 0
24.46 -2.82δδδδ1 0.30δδδδ2 -2.82δδδδ3 = 0 δδδδ3 = 30.50
Örnek olarak bazı uç momentlerinin hesabı aşağıdaki tabloda verilmiştir.
Uç M Mo δ1M δ2M δ3M M12 = 5.96 40.15x3.11 (-2.41)x9.14 30.50x1.00 = 139.30
M13 = -12.05 40.15x3.11 1.34x9.14 30.50x(-1.5) = 79.31
M1A = 6.09 40.15x(-6.21) 1.07x9.14 30.50x0.5 = -218.21 Σ=0
3kδ/L 3kδ/L
3kδ/L 3kδ/L
δ3=1
δδδδ3=1 δ3=-1
3kδ/L 3kδ/L
0.89
2.99
0.50
H31=0.12
H32=0.31
A
B
1.00
1.630.49
3.14
3.143.471.61
0.871.50
0.77 1.65=[3.47+3.14]/4
H33=2.82
0.40
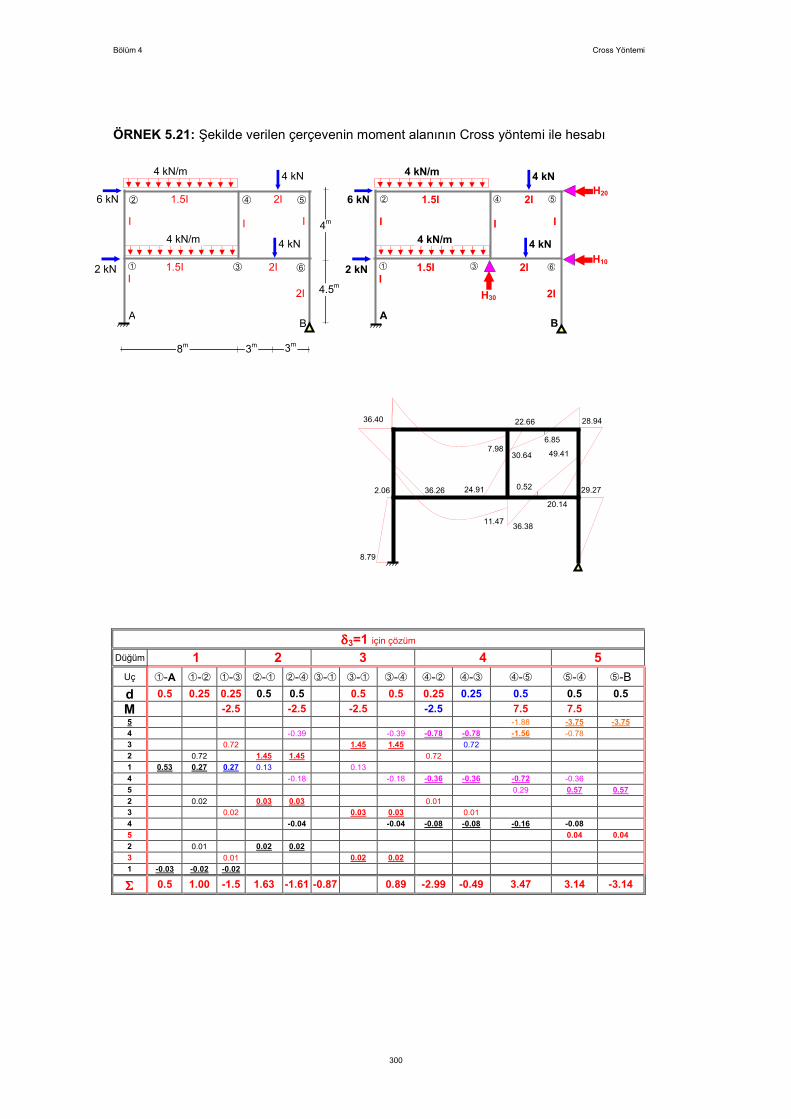
Bölüm 4 Cross Yöntemi
300
ÖRNEK 5.21: Şekilde verilen çerçevenin moment alanının Cross yöntemi ile hesabı
δδδδ3=1 için çözüm Düğüm 1 2 3 4 5
Uç �-A �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-� �-B
d 0.5 0.25 0.25 0.5 0.5 0.5 0.5 0.25 0.25 0.5 0.5 0.5
M -2.5 -2.5 -2.5 -2.5 7.5 7.5 5 -1.88 -3.75 -3.75
4 -0.39 -0.39 -0.78 -0.78 -1.56 -0.78
3 0.72 1.45 1.45 0.72
2 0.72 1.45 1.45 0.72
1 0.53 0.27 0.27 0.13 0.13
4 -0.18 -0.18 -0.36 -0.36 -0.72 -0.36
5 0.29 0.57 0.57
2 0.02 0.03 0.03 0.01
3 0.02 0.03 0.03 0.01
4 -0.04 -0.04 -0.08 -0.08 -0.16 -0.08
5 0.04 0.04
2 0.01 0.02 0.02
3 0.01 0.02 0.02
1 -0.03 -0.02 -0.02
ΣΣΣΣ 0.5 1.00 -1.5 1.63 -1.61 -0.87 0.89 -2.99 -0.49 3.47 3.14 -3.14
6 kN
��
2I 1.5I
2I 1.5I
4 kN
4 kN
I I I
2I
I
� � �
�
AB
2 kN
4 kN/m
4 kN/m
3m 3m 8m
4.5m
4m
H20
H10
6 kN
�
�
�
2I 1.5I
2I 1.5I
4 kN
4 kN
I I I
2I I
�
�
�
�
�
�
�
AB
H30
2 kN
4 kN/m
4 kN/m
22.66
36.26 24.91 0.52
49.41
28.94
6.85
29.27
20.14
30.64 7.98
36.38 11.47
36.40
2.06
8.79
Related Documents











