Wrist and fingers rehabilitation device Jaroslav Sobota, Jan Kutlwašer

Wrist and fingers rehabilitation device Jaroslav Sobota, Jan Kutlwašer.
Dec 16, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Wrist and fingers rehabilitation device
Jaroslav Sobota, Jan Kutlwašer

Wrist and finger home rehabilitation device
• Rehabilitation of wrist and fingers after surgical treatment of flexor/extensor tendons
• Rehabilitation of neurological pacients – stroke, brain and spinal cord injury, Parkinson disease, multiple sclerosis
Mechatronics-based Rehabilitation at Home 2
Smart mechatronic device complementing or replacing existing mechanical aids

MRH device requirements
User:
•Intuitive graphical interface, ideally making the excersises fun
•Ergonomic design
M.D. / Physiotherapist:
•Remote monitoring of rehabilitation activities (frequency, efectiveness)
•Remote adjustment of the excersises
Manufacturer / Service provider:
•Remote functionality diagnostics and service (firmware upgrade)
Legislative and regulatory:
•Safety, data security
Mechatronics-based Rehabilitation at Home 3

Project team
Department of Cybernetics
•R&D in embedded and distributed control systems and algorithms for process control, robotics and mechatronics
Department of Machine Design
•Prototype development•New study programme „Construction of medical equipment“
Mechatronics-based Rehabilitation at Home 4

Brief description of the device
• Exoskeleton architecture• Real-time measurement and
control• Graphical user interface• Data archiving, remote
access
Mechatronics-based Rehabilitation at Home 5

Control algorithm
• Graphical programming in the REX control system
• Bottom-up development
• Individual control of each phalanx in continuous passive motion (CPM) mode
• Defined velocity, acceleration and maximum angle
Mechatronics-based Rehabilitation at Home 6

Definition of exercises
• Sequential state machine programmed in SFC Editor
• Chain of conditioned actions
• Each state triggers movements of individual phalanxes
• Once the transition condition is fulfilled (angle is reached), next state is activated
• Once all the actions are performed, the cycle returns to initial state and can be repeated
Mechatronics-based Rehabilitation at Home 7

User interface
• Java-based visualization framework
• Real-time visualization of the exercise- animated 3D models (based on measured data)- running 2D plots (based on measured data)- exercise parameters
• Can be used locally or for remote supervision
• Straightforward design from CAD drawing
Mechatronics-based Rehabilitation at Home 8

Simulation of exercises
• Verification and/or visualization of the exercise
• Avoiding movements beyond ROM
• Preparing patient for the exercise
• Minor changes for guiding the patient through active exercises, the requested movement or target position is displayed
Mechatronics-based Rehabilitation at Home 9

Highlights of our approach
• REX control system is compatible with Matlab/Simulink
• Control algorithm can be easily verified before deployment
• No coding required, transfer to target platform is straightforward
• Visualization and user interface framework is available
• All parameters of the exercises can be changed over the internet
• Records of exercises are stored and can be used to evaluate the progress of rehabilitation treatment
Mechatronics-based Rehabilitation at Home 10

Philosophy of hand rehabilitation device
Mechatronics-based Rehabilitation at Home 11
• Whole device is modular assembly
• there are two basis (one for left hand and one for right hand)
• “fingers” of mechanism are in different sizes for each phalanx
• thumb’s holder is in more than one size
• servos, screws, are the same
• Fingerholders are cleanable or changeable

Philosophy of hand rehabilitation device
Mechatronics-based Rehabilitation at Home 12
Hand rehabilitation device cycle
device is assembledfor specific patient
device is assembledfor specific patient
patient use it
at home
patient use it
at home
patient returnsthe device
patient returnsthe device
the device is disassembledthe device is disassembled
some parts arerenewed
some parts arerenewed
exercise program setupby therapist
exercise program setupby therapist
parts are storedfor new usage
parts are storedfor new usage
therapist checks theexercise and changes
exercise program values
therapist checks theexercise and changes
exercise program values
wastewaste
new parts
new parts
exce
rcis
e da
ta
exce
rcis
e da
ta

Simplified design – the 1st design
Mechatronics-based Rehabilitation at Home 13

Simplified design – the new one
Mechatronics-based Rehabilitation at Home 14

Simplified design – pros and cons
Mechatronics-based Rehabilitation at Home 15
• Advantages of the new design:
• less number of parts
• easiest assembly
• measuring system in the servos could be used
• Disadvantages of the new design:
• rods of mechanism are slightly moved from center of axis
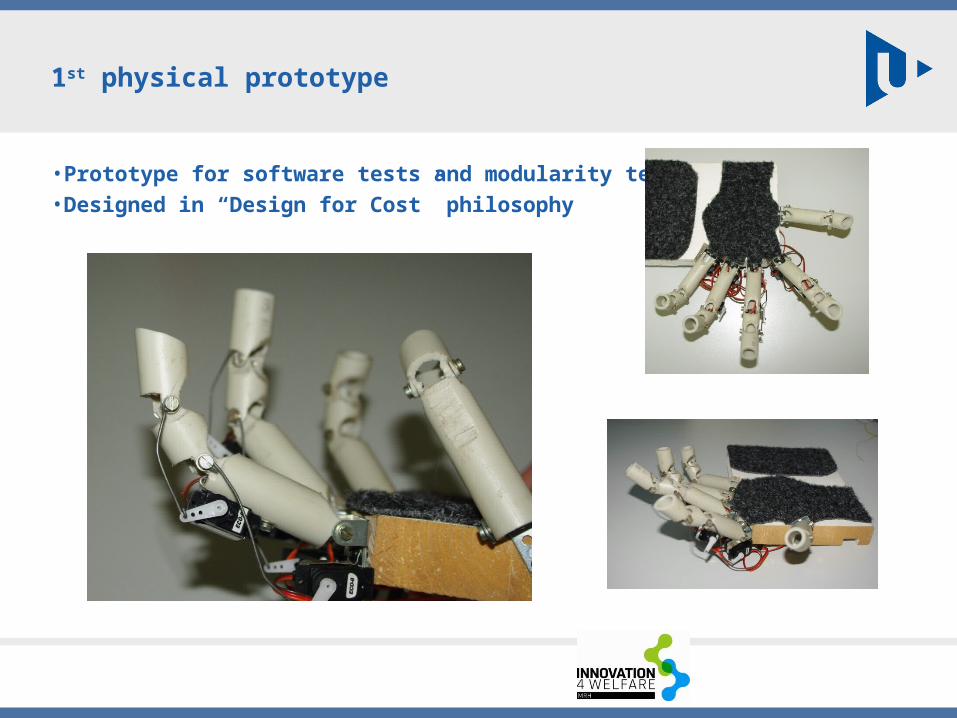
1st physical prototype
•Prototype for software tests and modularity tests•Designed in “Design for Cost” philosophy

Summary
• Insight into research and development at UWB within the MRH project
• The software and hardware part of the hand rehabilitation device
• The development continues …
Mechatronics-based Rehabilitation at Home 17

Summary
• Insight into research and development at UWB within the MRH project
• The software and hardware part of the hand rehabilitation device
• The development continues …
Thank you for your attention
Contact:
Jaroslav Sobota ([email protected])
Jan Kutlwašer ([email protected])
Josef Formánek ([email protected])
Mechatronics-based Rehabilitation at Home 18
Related Documents











