When is Temporal Planning Really Temporal? William Cushing Subbarao Kambhampati Special thanks to: J. Benton, Menkes van den Briel Mausam Daniel Weld

When is Temporal Planning Really Temporal? William Cushing Subbarao Kambhampati Special thanks to: J. Benton, Menkes van den Briel Mausam Daniel Weld.
Dec 16, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

When is Temporal Planning Really Temporal?
William CushingSubbarao Kambhampati
Special thanks to: J. Benton, Menkes van den
Briel
MausamDaniel Weld

Temporal Planning
Plan-space Extended planning graph Reduction to ILP State-space
Competition winners Reachability heuristics
Infinite number of time points Decision Epochs
Restrict start times to events
Introduction
name [duration]
start-pre end-preover-pre
start-eff end-eff
light-match [8]
ML L
M
fix-fuse [4]
L
F
M - match
L - light
F - fuse
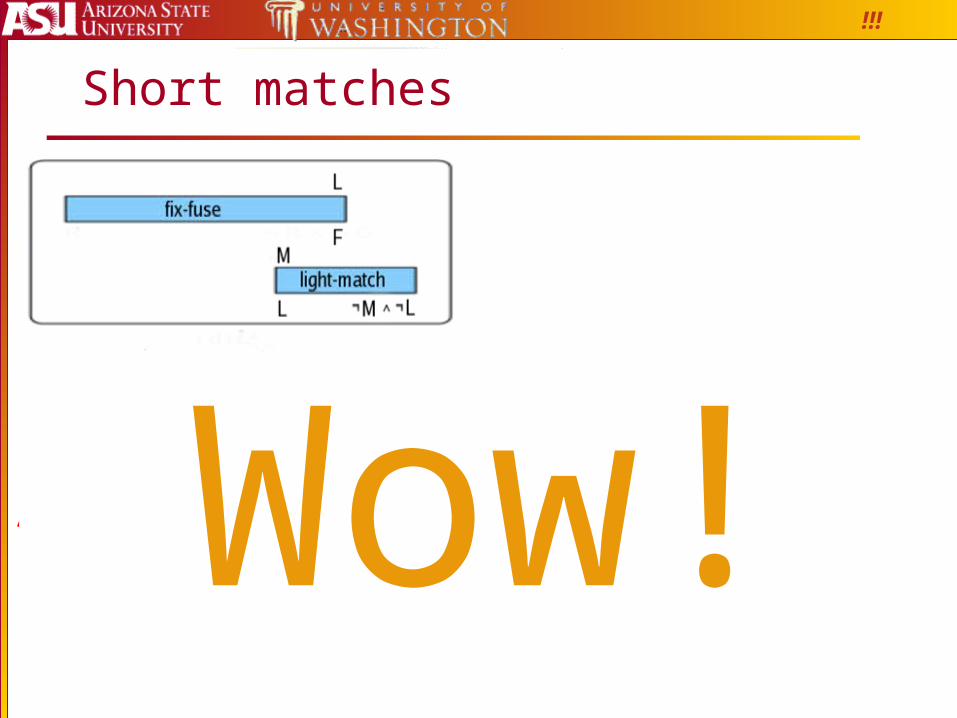
Short matches
No epoch available “middle of
nowhere”
Decision Epoch Planning is incomplete!
!!!
Wow!

Troubling Questions
What do/should the IPCs measure?
Essence of Temporal Planning Required Concurrency Temporally Simple Temporally Expressive
Can Decision Epoch Planning be fixed?
No. But! DEP+
“Less” incomplete
TEMPO Reachability heuristics
Overview
≈ Classical ≈
Harder

Required Concurrency
Temporally Simple Languages Concurrency never necessary …but can be exploited for quality
Temporally Expressive Languages Can specify problems such that
concurrency is needed
Essence of Temporal Planning

Temporal Action Languages
eo,s,es,Lname [duration]
Start-pre End-preOver-pre
Start-eff End-eff
Essence of Temporal Planning
oeLname [duration]
Over-pre
End-eff

eo,s,es,L
A [d]
s eo
s e
Essence of Temporal Planning

Temporal Action Languages
Temporally Simple Rescheduling is possible
MIPS, SGPlan, LPG, …
Sequential planning is complete – “optimal” ? TGP, yes In general, yes
Temporally Expressive
Temporal Gap
A [d]
s eo
s eeo,s,es,L
Les Ls
eLs,e
Essence of Temporal Planning
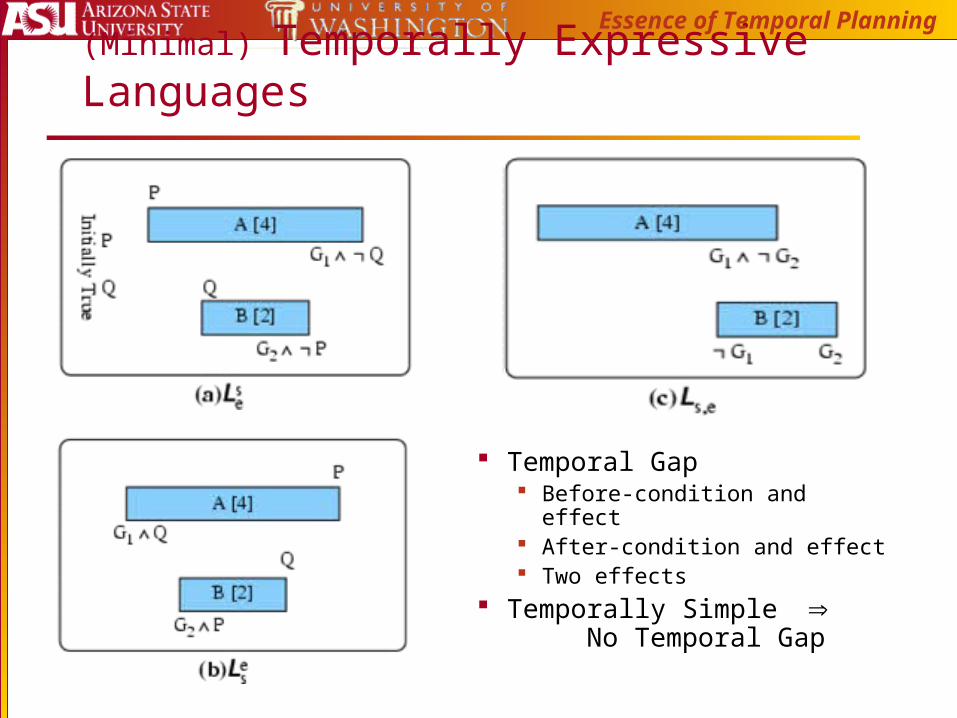
(Minimal) Temporally Expressive Languages
Temporal Gap Before-condition and
effect After-condition and effect Two effects
Temporally Simple No Temporal Gap
Essence of Temporal Planning
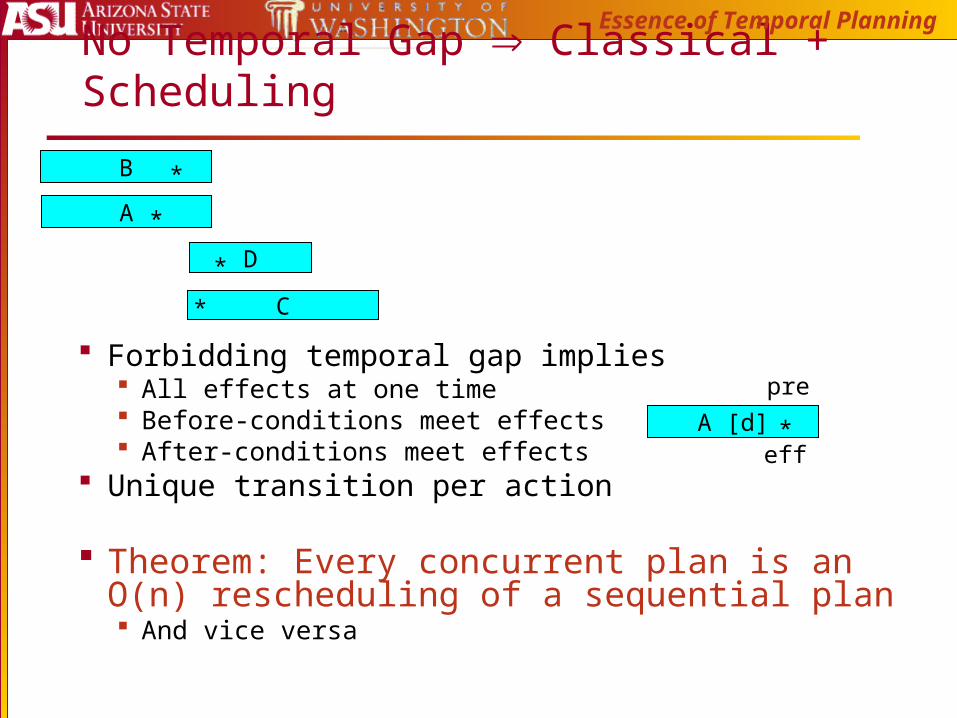
No Temporal Gap Classical + Scheduling
Forbidding temporal gap implies All effects at one time Before-conditions meet effects After-conditions meet effects
Unique transition per action
Theorem: Every concurrent plan is an O(n) rescheduling of a sequential plan And vice versa
A [d] *
pre
eff
Essence of Temporal Planning
A *
B *
C*
D*

Wow!
Temporally Simple Classical + Scheduling
Winners incomplete for all Temporally Expressive
Languages
Most/all benchmarks are classical!
!!!
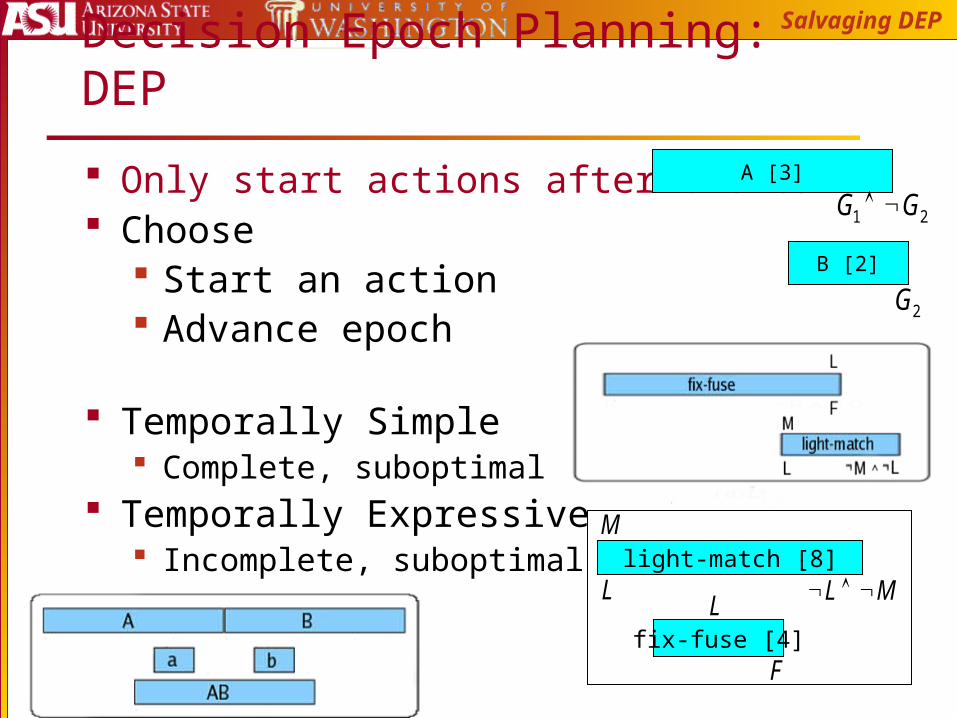
Decision Epoch Planning: DEP
Only start actions after events Choose
Start an action Advance epoch
Temporally Simple Complete, suboptimal
Temporally Expressive Incomplete, suboptimal
Salvaging DEP
A [3]
21 GG
B [2]
2G
light-match [8]ML L
M
fix-fuse [4]L
F
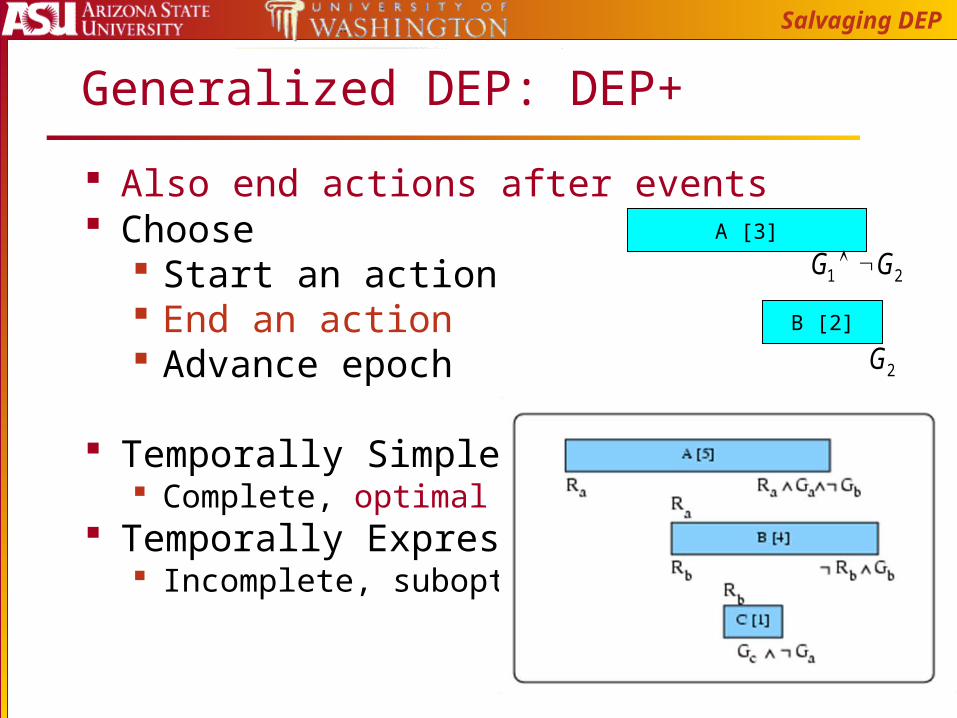
Generalized DEP: DEP+
Also end actions after events Choose
Start an action End an action Advance epoch
Temporally Simple Complete, optimal
Temporally Expressive Incomplete, suboptimal
Salvaging DEP
A [3]
21 GG
B [2]
2G
State of the Art: Incomplete or Slow
Metric-FF, MIPS, SGPlan, SAPA, TP4, TPG, HSP*, ... Guarantees only for temporally
simple languages Can solve some concurrent problems
Light-match, but not short-match Difficult to detect
ZENO, IxTeT, VHPOP, LPGP, ... Complete Slow
!!!
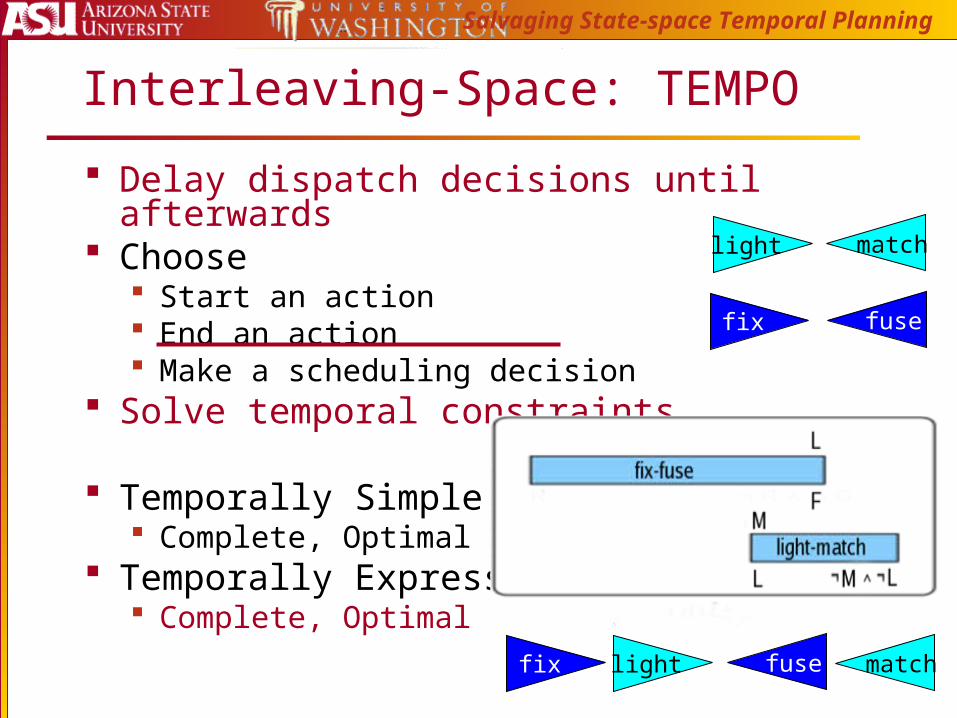
Interleaving-Space: TEMPO
Delay dispatch decisions until afterwards
Choose Start an action End an action Make a scheduling decision
Solve temporal constraints
Temporally Simple Complete, Optimal
Temporally Expressive Complete, Optimal
Salvaging State-space Temporal Planning
light
fix
match
fuse
fix
fix light
fusefix light
matchfusefix light

Conclusions
Required concurrency is the essence of temporal planning Otherwise classical planner + O(n) scheduling
suffices Simple test for required concurrency: Temporal
gap Decision epoch planning is fundamentally
incomplete But DEP+ may solve most real-world problems
Complete state-space temporal planning: TEMPO Allows leveraging of state-based reachability
heuristics !!!!!
Related Documents











