Web Enabled Robot Design and Dynamic Control Simulation Software Solutions From Task Points Description Tarek Sobh, Sarosh Patel and Bei Wang School of Engineering University of Bridgeport

Web Enabled Robot Design and Dynamic Control Simulation Software Solutions From Task Points Description Tarek Sobh, Sarosh Patel and Bei Wang School of.
Dec 24, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Web Enabled Robot Design and Dynamic Control Simulation Software Solutions From Task Points Description
Tarek Sobh, Sarosh Patel and Bei WangSchool of EngineeringUniversity of Bridgeport

Table of Content
Research Summary Task Point Description Theory The Software Package Results Conclusion Future Development Current Project Status
Research Summary
A web-based solution for robot design and dynamic control simulation based on given task point descriptions
The software combines and utilizes the computational power of both the Mathematica and Matlab packages
Research Summary (cont.)
Given the location and velocity of each task point, our approach formulates the complete design of a 3 DOF robot model by computing its optimal dynamic parameters such as link length, mass and inertia
Suggests the optimal control parameters (Kp, Kv) for the dynamic control simulation
Puma560: 3 DOF robot
Task Point Description
A set of desired positions of an end-effector
Velocities at a particular instant of time
Problem definition: to obtain the optimal robot design and dynamic control strategy in such a way that the task can be carried out with maximum manipulability and minimum error in reaching the desired positions and velocities

Theory
Manipulability The Cost Function Optimizing the Cost Function Calculations of Dynamic Parameters Trajectory Generation PD Control Loop Optimization of Kp and Kv
TheoryManipulability
Manipulability: the ability of the manipulator to accelerate in all directions from that point
Yoshikawa:
)()(det qJqJ Tyoshi

TheoryThe Cost Function
The criteria used to form the cost function: Manipulability Accuracy Distance from the point.
K is the DH parameter of the robot q1,q2..qm are the joint vectors of the task points
),....2,1,( qmqqKF

TheoryOptimizing the Cost Function
Uses the steepest descent algorithm, which finds the minima by searching in the direction opposite, to the gradient
Minimizing the function provides the optimal values for the DH table

TheoryCalculations of Dynamic Parameters
Calculates manipulator DH table on the following assumptions:The manipulator links are solid and cylindrical
in shapeAll links have uniform density (uniform mass
distribution)All the links are made of the same materialThere are a finite number of actuators and
sensors with known specifications that can be used in the design
TheoryCalculations of Dynamic Parameters (Cont.)
Mass:
Center of Gravity: The center of gravity is calculated geometrically with respect to the link coordinate frame
darm iii2
TheoryCalculations of Dynamic Parameters (Cont.)
Inertia: Since the links are considered to be cylindrical, the Inertia about the axis of a cylinder is given by:
Using the perpendicular axis theorem the Inertia along the other two axes is given by:
21 2
1iirmI
232 4
1iirmII
TheoryTrajectory Generation
A seven-degree polynomial to generate the trajectory
The control loop is implemented over to support this trajectory

TheoryPD Control Loop
It is advantageous to use a PD control loop:Simple to implement Involves few calculations; ideal for real time
control provided with optimum Kp and Kv System behavior can be controlled by changing
the feedback gainsCan be implemented in parallel for each link
TheoryPD Control Loop (cont.)
Torque to be applied to the manipulator: Forward Dynamics
The feedback loop: Inverse Dynamics In the case of real time control: the
sensors provide the feedback
TheoryPD Control Loop (cont.)
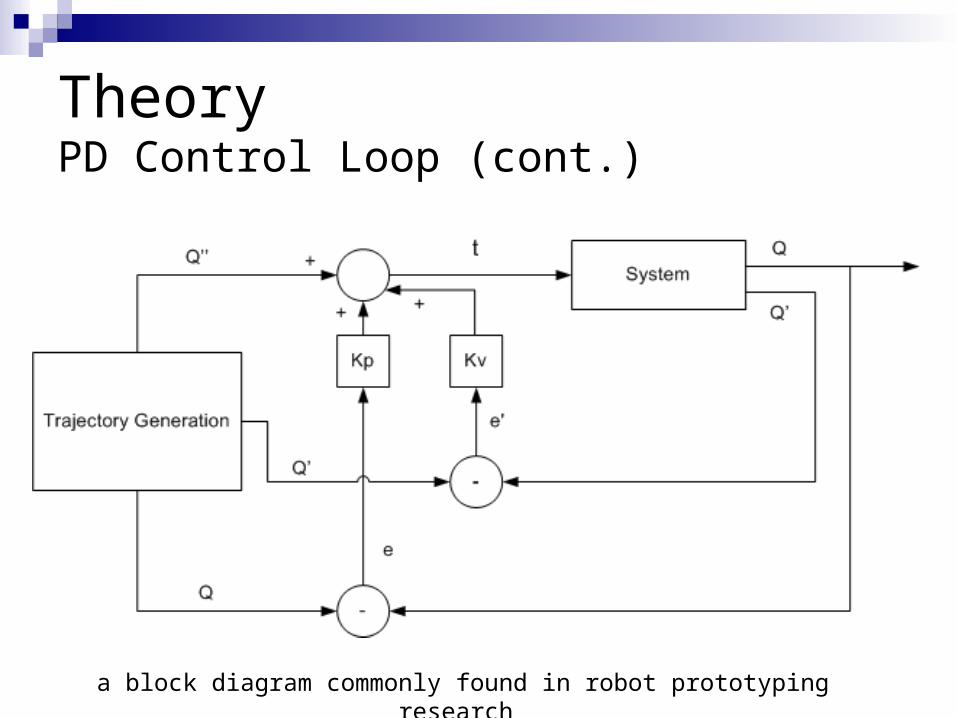
a block diagram commonly found in robot prototyping research

TheoryPD Control Loop (cont.)
Kp: proportional gain Kv: derivative gain e: error in position e’: error in velocity
TheoryOptimization of Kp and Kv
Sum of the Square of Errors about the desired trajectory should be less than a specified threshold
The Software Package
Web Interface Kinematic Design Module Dynamic Design Module Dynamic Control Simulation Module

The Software Package (Cont.)
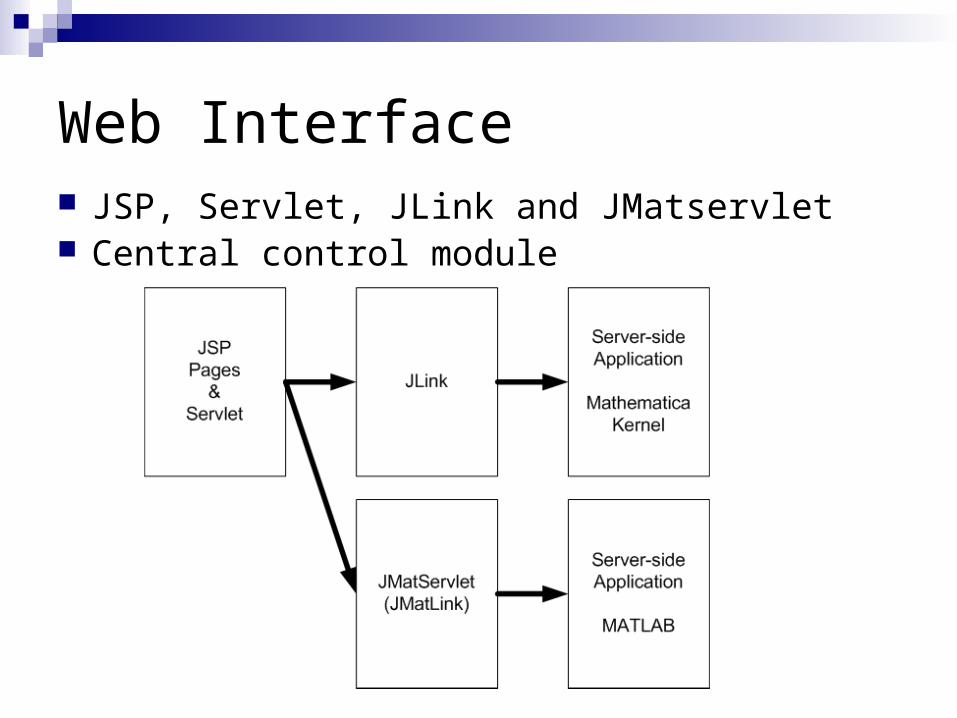
Web Interface JSP, Servlet, JLink and JMatservlet Central control module

Kinematic Design Module
Generate best kinematics robot configuration with max manipulability
Modified kinematics synthesis package build on top of Robotica
Input: set of task points description Output: a robot configuration in the form of
DH table (optimal kinematics properties of the three-link robot)
Kinematic Design Module (Cont.)
DesignRobot [task_points, configuration, precision, file_name]
Task_points: a matrix with xyz coordinates of task points
Configuration: a string of ‘R’s and ‘P’s describing prismatic or rotational joints
File_name: the location in which the DH configuration file is stored
Dynamic Design Module
Input: file (DH table) generated by Kinematic model; radii of the links; (mass of the links is pre-assumed)
Output: Dynamic parameter matrix ‘dyn’ Running in the MATLAB environment
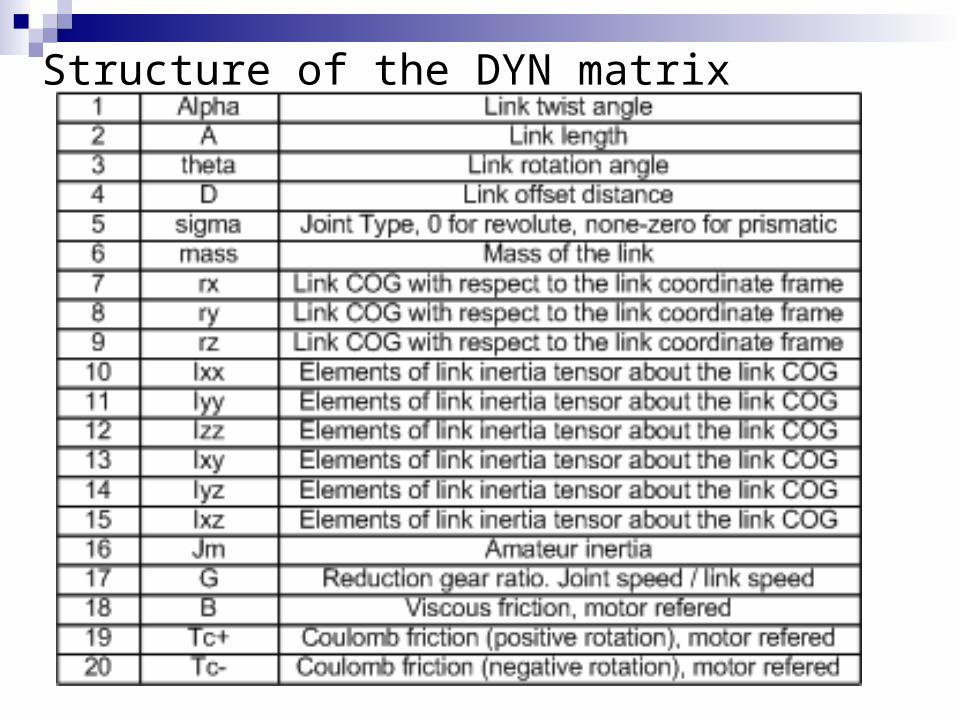
Structure of the DYN matrix

Dynamic Control Simulation Module
MATLAB environment Input: coordinates of points with respect to
a time frame and velocities at those points; specified range of values for Kp and Kv and the step increment
Output: optimum value of Kp and Kv, and update frequency
Results User login Screen
sample run video

User specifies number of task points

User specifies the coordinates and velocities of each task points with respect to a time scale
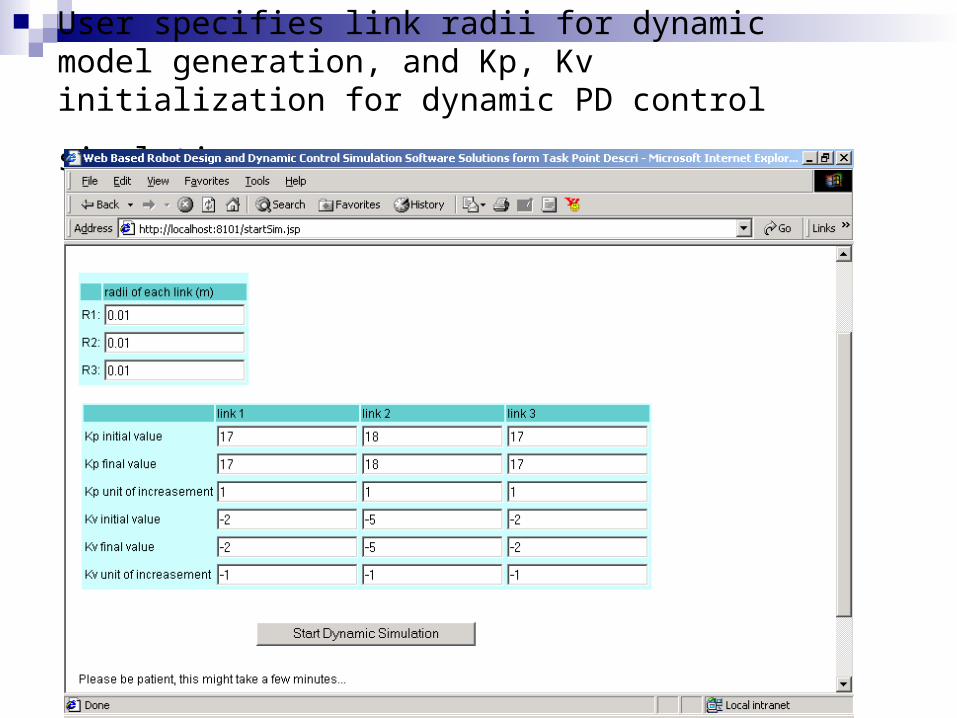
User specifies link radii for dynamic model generation,
and Kp, Kv initialization for dynamic PD control simulation

DH table, Dynamic Parameter Matrix and optimal
Kp, Kv values for each link

A standard PPP model
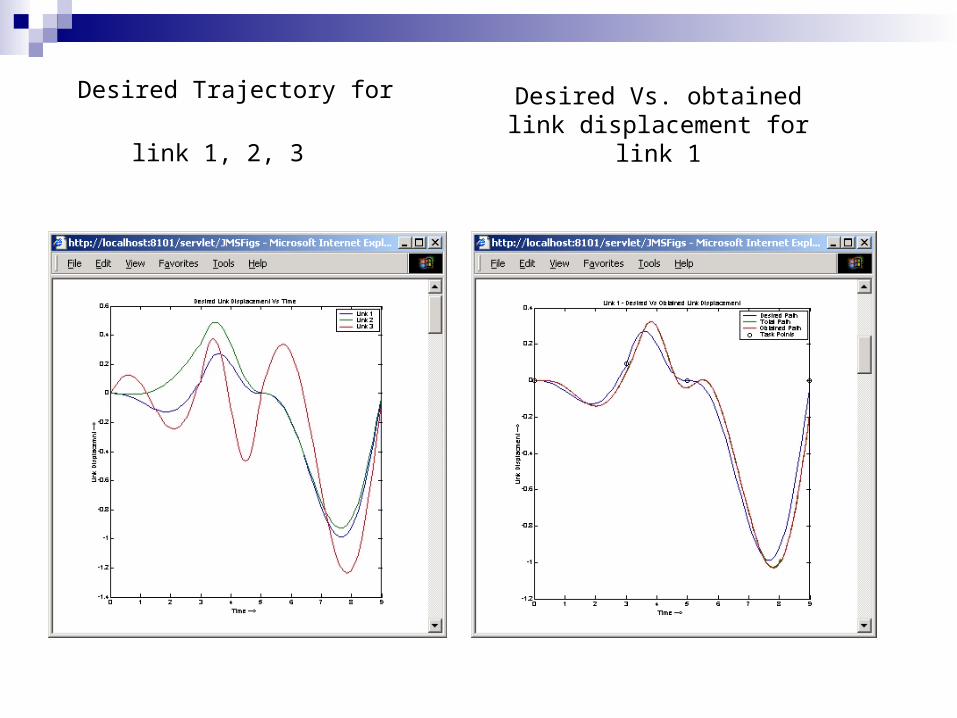
Desired Trajectory for link 1, 2, 3
Desired Vs. obtained link displacement for link 1

Desired Vs. obtained link displacement for link 2
Desired Vs. obtained link displacement for link 3
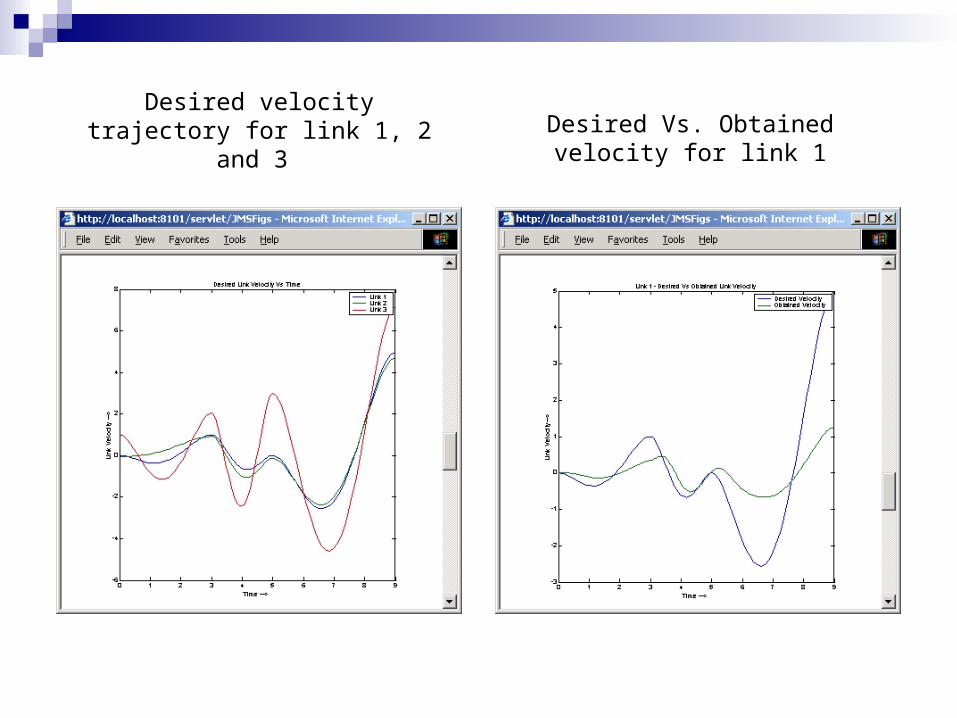
Desired velocity trajectory for link 1, 2 and 3
Desired Vs. Obtained velocity for link 1
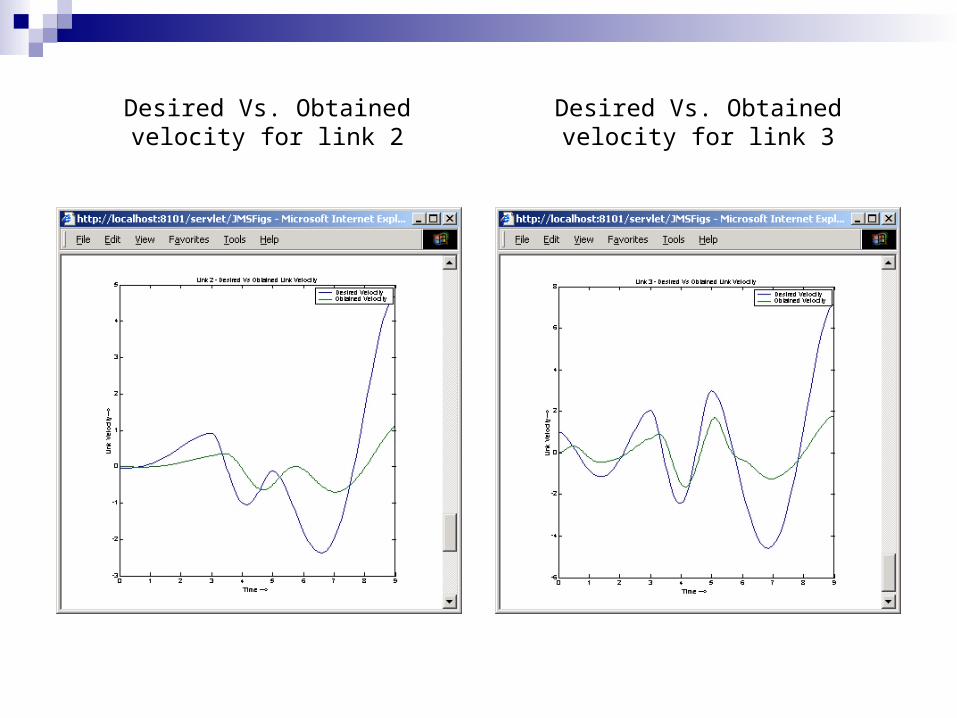
Desired Vs. Obtained velocity for link 2
Desired Vs. Obtained velocity for link 3
Conclusion
Web-enabled Generates the basic configuration of a
manipulator based on user specified task points, in order to attain the greatest manipulability in the workspace.
Provides the optimum values of Kp, Kv for optimum dynamic control.
Future Development Building better cost functions
Customizable objective functions
Advanced trajectory generation algorithms
Faster algorithms for calculation of inverse kinematics
A numerical solution package for inverse kinematics for a few common robot models
Implementation of PID control in addition to PD control, to further minimize the error
Current Project Status
The following paper:
A MOBILE WIRELESS AND WEB BASED ANALYSIS TOOL FOR ROBOT DESIGN AND DYNAMIC CONTROL SIMULATION FROM TASK POINTS DESCRIPTION has been accepted by the Journal of Internet Technology

References Proceedings: Lloyd J., Hayward V. “A Discrete Algorithm for Fixed-path Trajectory
Generation at Kinematic Singularities”, IEEE Int. Conf. on Robotics and Automation, Minneapolis (1996)
Proceedings: Sobh T. and Toundykov D. “Kinematic Synthesis of Robotic Manipulators from Task Descriptions”, to appear in IEEE magazine on Robotics and Automation, summer (2003).
Journal: Yoshikawa T. “Manipulability of Robot Mechanisms”. International Journal of Robotics Research, vol.4, pp.3--9 (1985)
Proceedings: Pires E., Machado J. and Oliveira P. "An Evolutionary Approach to Robot Structure and Trajectory Optimization", 10th International Conference on Advanced Robotics, pg. 333-338, Budapest, Hungary, August (2001)
Journal: Sobh, T., Dekhil, M., Henderson T., and Sabbavarapu A. “Prototyping a Three Link Robot Manipulator”, International Journal of Robotics and Automation, Vol. 14, No. 2 (1999)
Report: Dekhil, M., Sobh T., Henderson T., Sabbavarpu A. and Mecklenburg R. “Robot manipulator prototyping (Complete design review)”, University of Utah (1994)
Books: Spong M. and Vidyasagar. “Robot Dynamics and Control”, Wiley, New York (1989) Images obtained from: <helix.gatech.edu/Classes/ME4451/2002S3/
Lectures/03TwoSerialRobots.pdf >
Thank You
Related Documents