Vision January 10, 2007

Vision January 10, 2007. Today's Agenda ● Some general notes on vision ● Colorspaces ● Numbers and Java ● Feature detection ● Rigid body motion.
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Vision
January 10, 2007

Today's Agenda
● Some general notes on vision
● Colorspaces
● Numbers and Java
● Feature detection
● Rigid body motion

Some general notes on vision

Vision is difficult
● Animal vision is very complex
● Right: Circuitry of macaque visual cortex (Felleman and Van Essen, 1991)

Object recognition is difficult
A theory of object recognition has to specify:
● The nature of stored visual representations in long-term memory
● The nature of the intermediate representations● A computational account of how each intermediate
representation can be derived from the previous one
● A determination of whether the answers to the above points are different for different kinds of objects

What makes it difficult?
● A single image can be cast by many different objects
● A single object can cast many different images
● Two main challenges:
1. Invariance/Tolerance: Generalizing across changes in size, orientation, lighting, etc. to realize that these images are all of the same thing
2. Specificity: Appreciating the distinction between different categories
Theories on solving this problem
● Inverse optics:● Try to solve the problem of determining what shape
may have cast the image● This is an ill-posed problem
● Association:● Store each possible version of an object● Brute force
● Other intermediate descriptors (e.g. Parts, image fragments)

But...
Luckily, in MASLab, your problem is greatly simplified!

Colorspaces

Representing Colors
● RGB used to represent colors of light
● CMYK used to represent colors of pigment
● ...but both mix color, tint, brightness

HSV Colorspace
● Hue (color): 360 degrees mapped 0 to 255. Note that red is both 0 and 255.
● Saturation (amount of color)● Value (amount of light and dark)● We provide the code to convert to HSV● Note: White is low saturation but can have
any hue● Note: Black is low value but can have any
hue

Tips for differentiating colors
● Calibrate for different lighting conditions (26-100 is darker than the lab)
● Globally define thresholds● Use the gimp/bot client on real images● Use a large sample set
You don't HAVE to use HSV. Past teams have used other models such as RGB.

Numbers and Java

How values are stored
Uses Hexadecimal (base 16)● 0x12 = 18
A color is 4 bytes = 8 hex numbers
For HSV, these bytes are:● Alpha● Hue● Saturation● Value

Manipulating HSV values
Use masks to pick out parts.● 0x12345678 & 0x0000FF00 = 0x00005600
Shift to move parts.● 0x12345678 >> 8 = 0x00123456
Example:Hue = (X >> 16) & 0xFF

Notes on Java...
All Java types are signed!● A byte ranges from -128 to 127● Coded in two's complement: to change sign, flip
every bit and add 1
Don't forget higher-order bits!● (int) 0x0000FF00 = (int) 0xFF00● (int) ((byte) 0xFF) = (int) 0xFFFFFFFF
Watch out for shifts!● 0xFD000000 >> 8 = 0xFFFD0000

Performance
Getting an image performs a copy● Int[] = bufferedImage.getRGB(…)
Getting a pixel performs a multiplication● int v = bufferedImage.RGB(x,y)● offset = y*width + x
Go across rows, down columns (memory in rows, not columns)

Feature Detection

MASLab Features
● Red balls● Yellow goals● Blue lines● Blue ticks● Green-and-black bar codes

Ideas for dealing with blue lines
● Search for N blue pixels in a column● Make sure there's wall-white below● Candidate voting:
● In each column, list places where you think line might be
● Find shortest left-to-right path through candidates

Ideas for dealing with bar codes
● Look for green and black● Look for not-white under blue line● Check along a column to determine colors● RANdom SAmple Consensus (RANSAC):
● Pick random pixels within bar code● Are they black or green?
Looking for an object
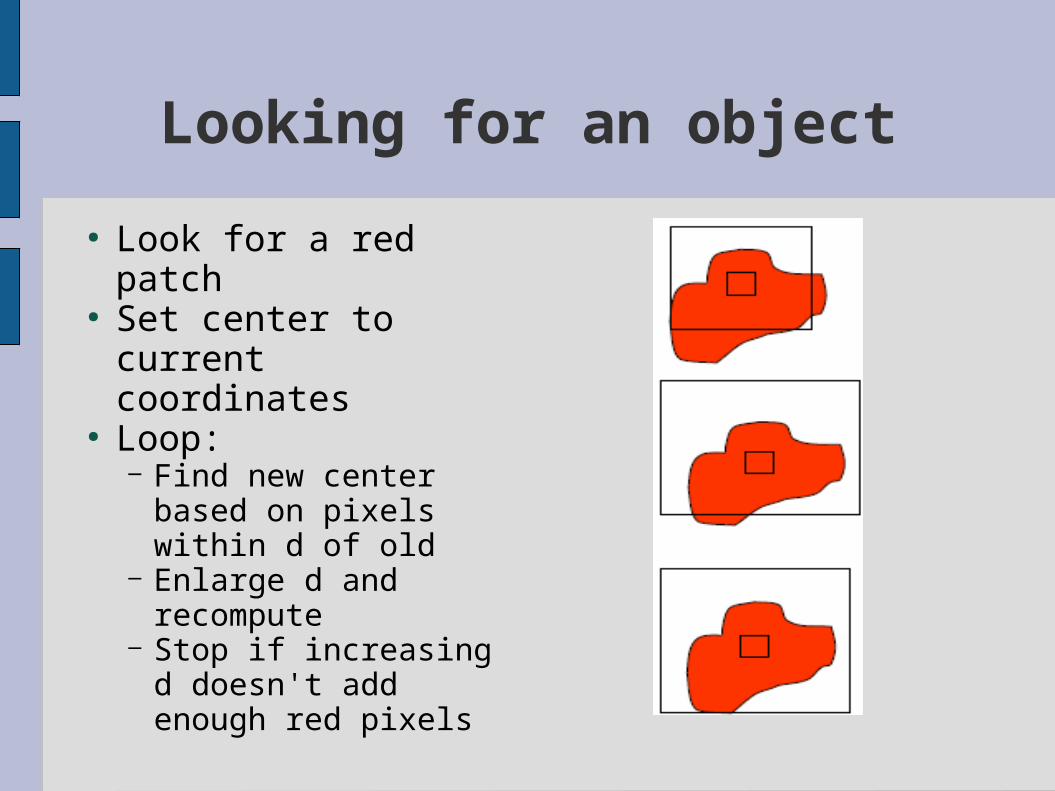
● Look for a red patch● Set center to current
coordinates● Loop:
– Find new center based on pixels within d of old
– Enlarge d and recompute
– Stop if increasing d doesn't add enough red pixels

Distance
Remember:● Closer objects are bigger● Closer objects are lower
Other considerations
Find ways to deal with:
● Noise● Occlusion● Different viewing angles● Overly large thresholds

Rigid Body Motion

Rigid Body Motion
● Going from data association to motion
● Given– Starting x1, y1, θ1– Set of objects
visible in both images
● What are x2, y2, θ2?
More rigid body motion
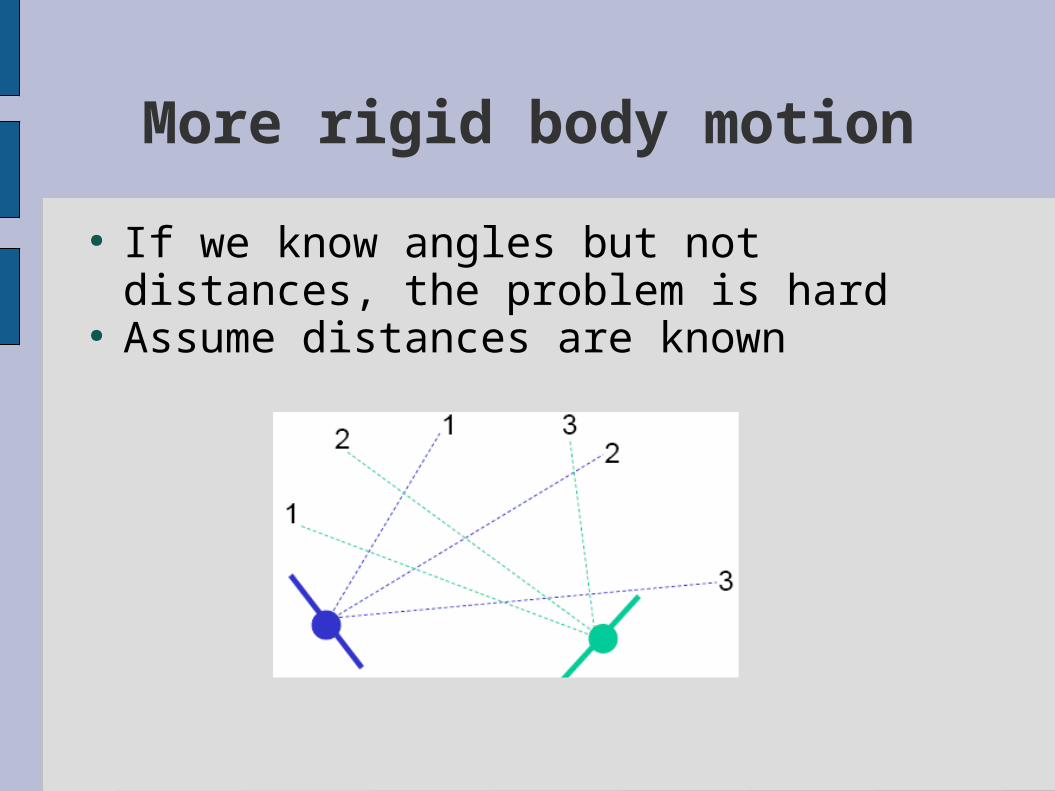
● If we know angles but not distances, the problem is hard
● Assume distances are known

But if angles and distances are known...
...we can construct triangles

Rigid body motion math
● Apply the math for a rotation:
x1i = cos(θ) * x2i + sin(θ) * y2i + x0y1i = cos(θ) * y2i - sin(θ) * x2i + y0
● Solve for x0, y0, θ with least squares:
Σ (x1i - cos(θ) * x2i - sin(θ) * y2i – x0)^2 +(y1i - cos(θ) * y2i + sin(θ) * x2i – y0)^2
● Need at least two objects to solve

Advantages and Disadvantages
Advantages:● Relies on the world, not odometry● Can use many or few associations
Disadvantages:● Can take time to compute
Related Documents











