Vision-Based Interactive Systems Martin Jagersand c610

Vision-Based Interactive Systems Martin Jagersand c610.
Dec 20, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Vision-Based Interactive Systems
Martin Jagersand
c610

Applications for vision in User Interfaces
Interaction with machines and robots– Service robotics– Surgical robots– Emergency response
Interaction with software– A store or museum information kiosk

Service robots
Mobile manipulators, semi-autonomous
DIST TU Berlin KAIST

TORSO with 2 WAMs
Service tasks
This is completely hardwired! Found no real task on WWW
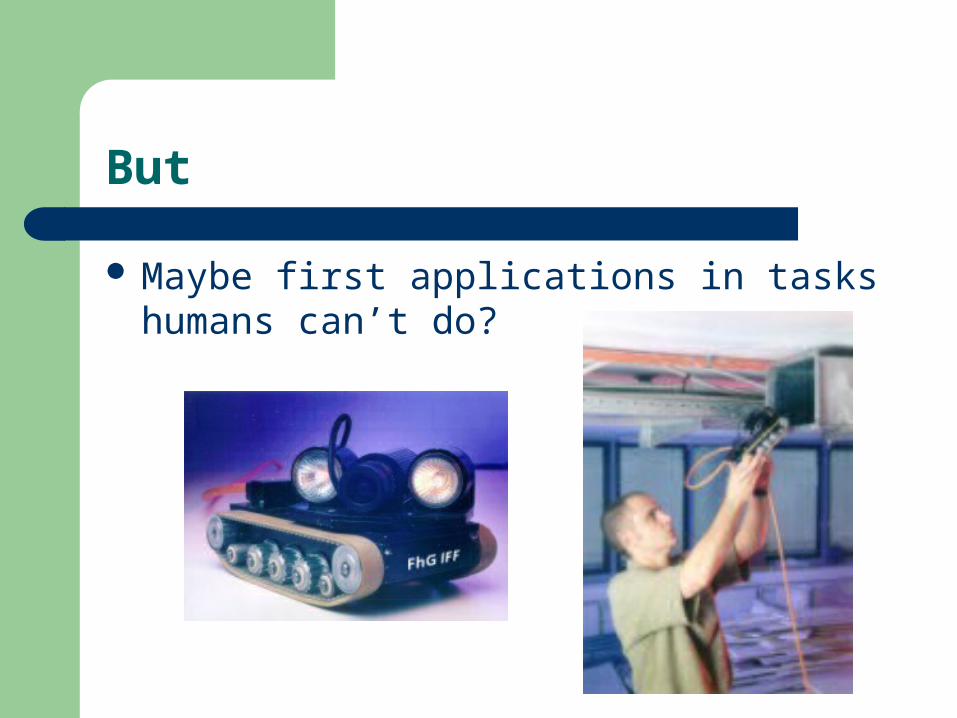
But
Maybe first applications in tasks humans can’t do?

Why is humanlike robotics so hard to achieve?
See human task:– Tracking motion, seeing gestures
Understand:– Motion understanding: Translate to correct
reference frame– High level task understanding?
Do: – Vision based control
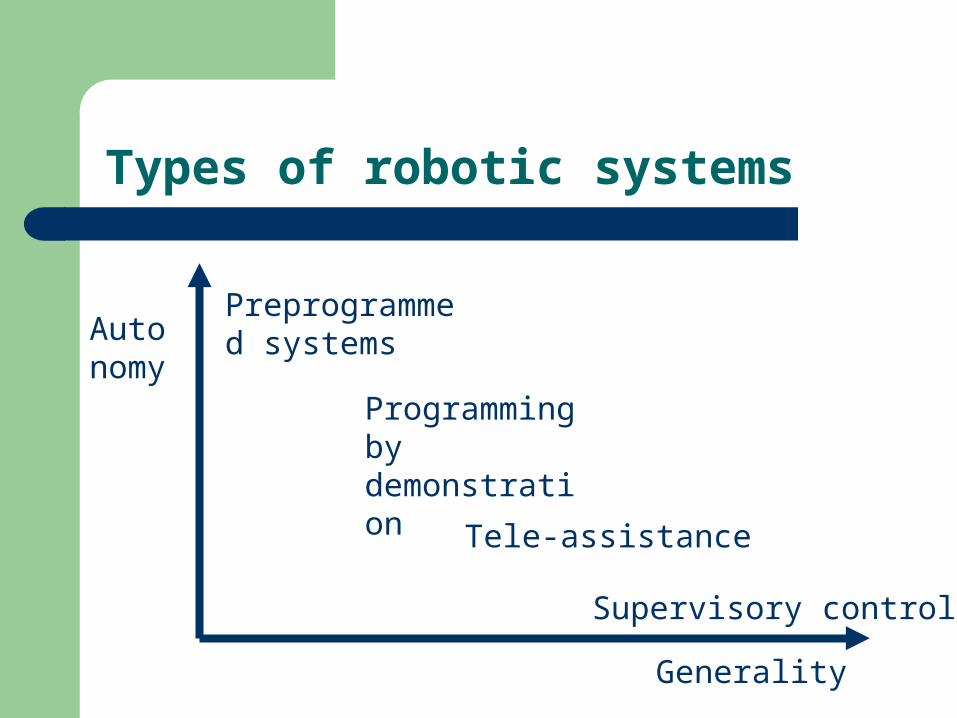
Types of robotic systems
Autonomy
Generality
Supervisory control
Tele-assistance
Programming by demonstration
Preprogrammed systems

Interaction styles
If A then
end
Conventional: • Low bandwidth interaction
• Partial or indirect system state displayed
• User works from internal mental model
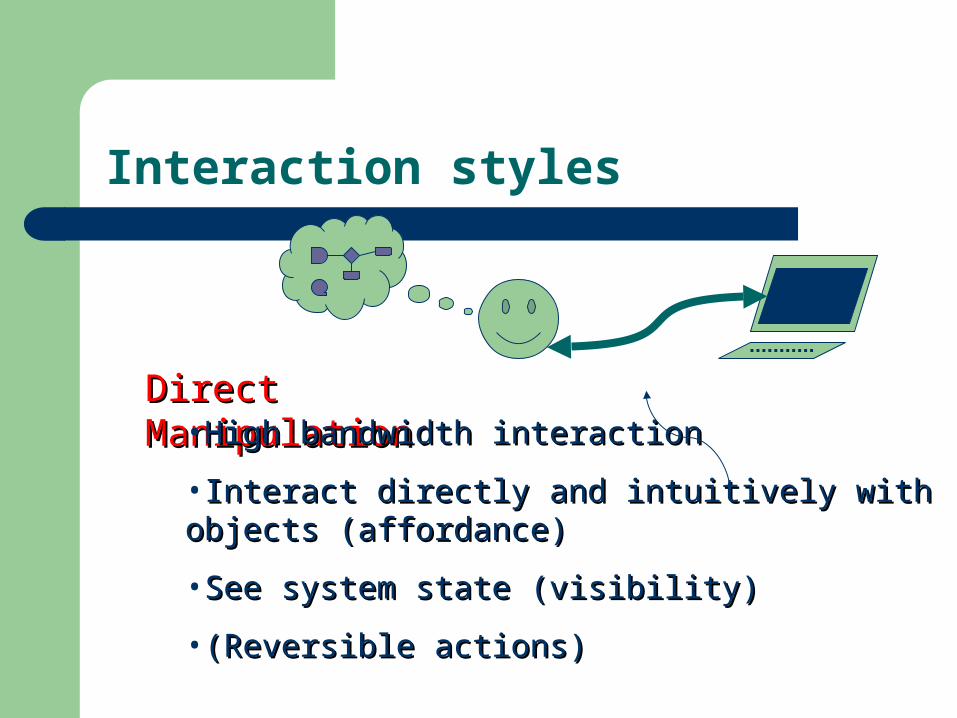
Interaction styles
Direct ManipulationDirect Manipulation:•High bandwidth interactionHigh bandwidth interaction
•Interact directly and intuitively with objects (affordance)Interact directly and intuitively with objects (affordance)
•See system state (visibility)See system state (visibility)
•(Reversible actions)(Reversible actions)
Examples of Direct Manipulation
Drawing programs e.g. Mac Paint Video games, flight simulator Robot/machine teaching by showing Tele-assistance Spreadsheet programs Some window system desktops
But can you always see effects (visibility)?
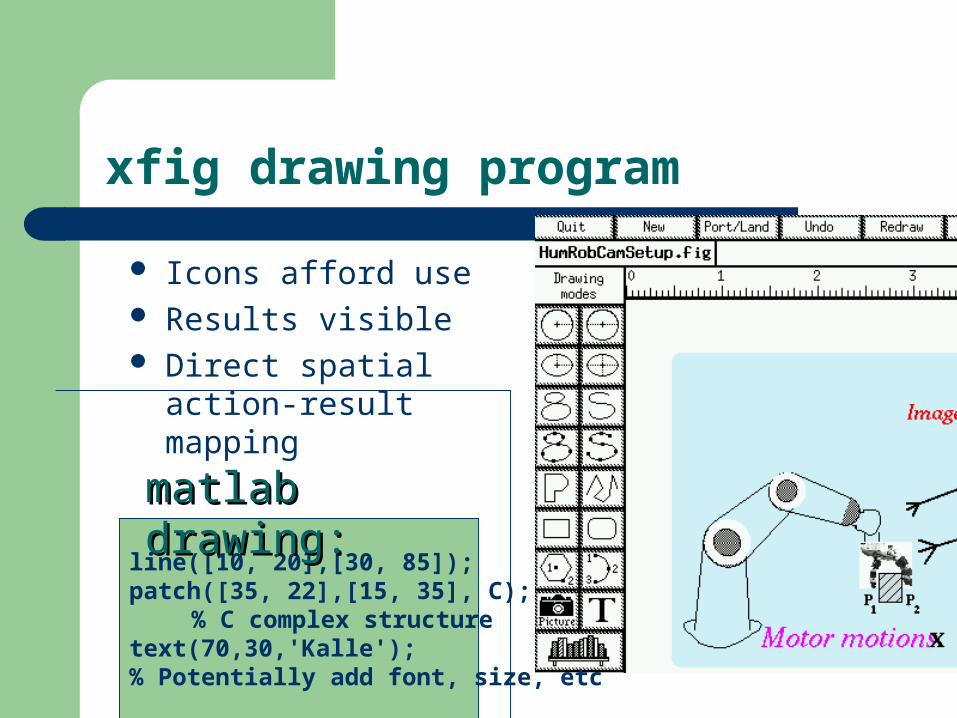
xfig drawing program
Icons afford use Results visible Direct spatial action-
result mapping
line([10, 20],[30, 85]);patch([35, 22],[15, 35], C);
% C complex structuretext(70,30,'Kalle'); % Potentially add font, size, etc
matlab drawing:matlab drawing:
Why direct manipulation?
Recognition quicker than recall. Human uses “the world” as memory/model Human skilled at interacting spatially
How quick is direct? Subsecond! Experiments show human Subsecond! Experiments show human
performance decreased at 0.4s delay.performance decreased at 0.4s delay.
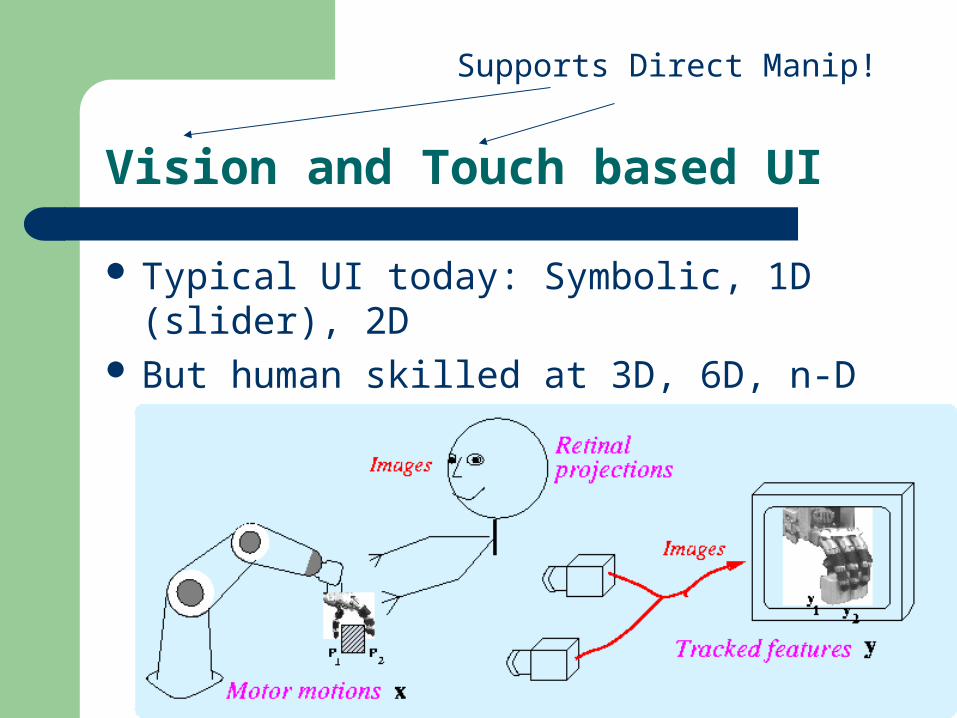
Vision and Touch based UI
Typical UI today: Symbolic, 1D (slider), 2D But human skilled at 3D, 6D, n-D spatial
interaction with the world
Supports Direct Manip!

Seeing a task
Tracking movement– See directions, movements in tasks
Recognizing gestures– Static hand and body postures
Combination: Spatio-temporal gestures

Tracking movement
Tracking the human is hard:– Appearance varies– Large search space, 60 parameters– Unobservable: Joint angles have to be inffered from
limb positions, clothing etc.– Motion is non-linear.– Difficult to track 3D from 2D image plane info– Self occlusion of limbs
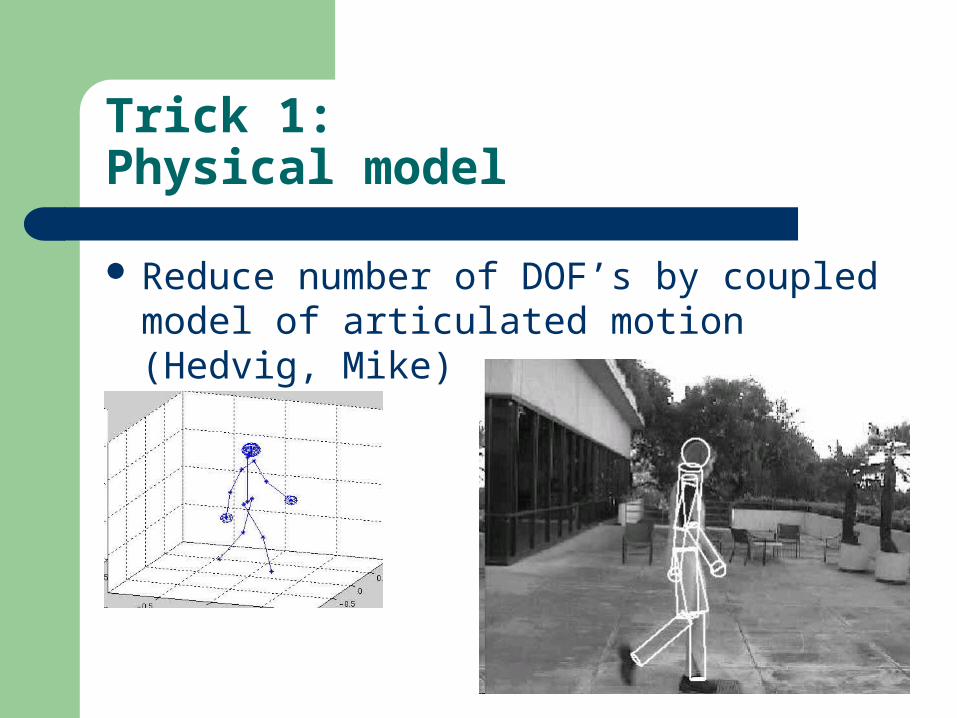
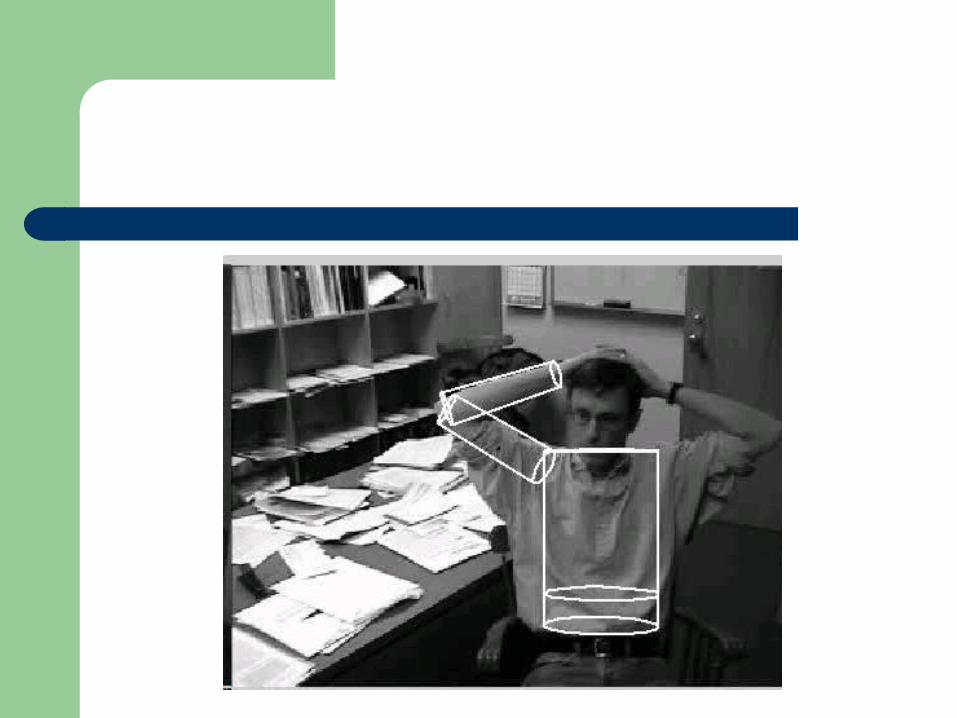
Trick 1:Physical model
Reduce number of DOF’s by coupled model of articulated motion (Hedvig, Mike)
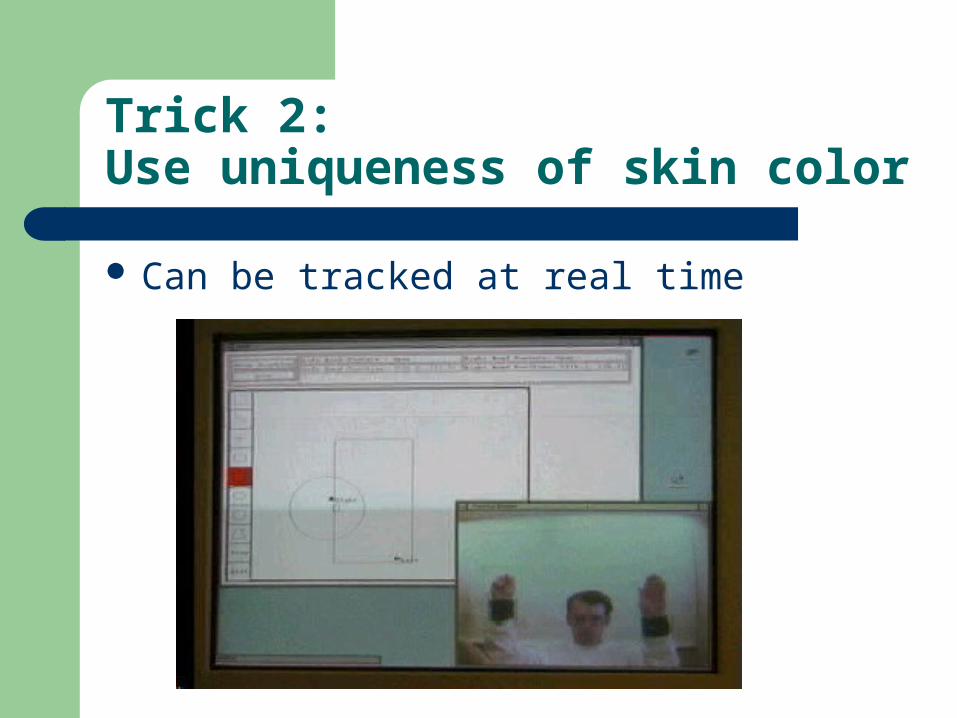
Trick 2:Use uniqueness of skin color
Can be tracked at real time
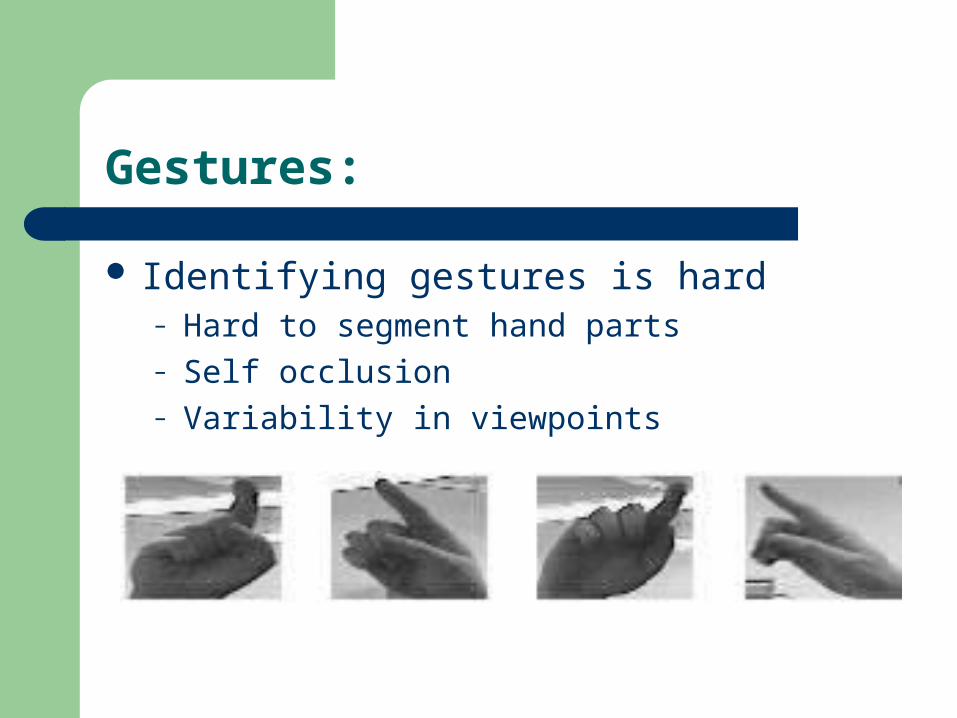
Gestures:
Identifying gestures is hard– Hard to segment hand parts– Self occlusion– Variability in viewpoints

Trick 3:Scale space
Define hand gesture in course to fine terms
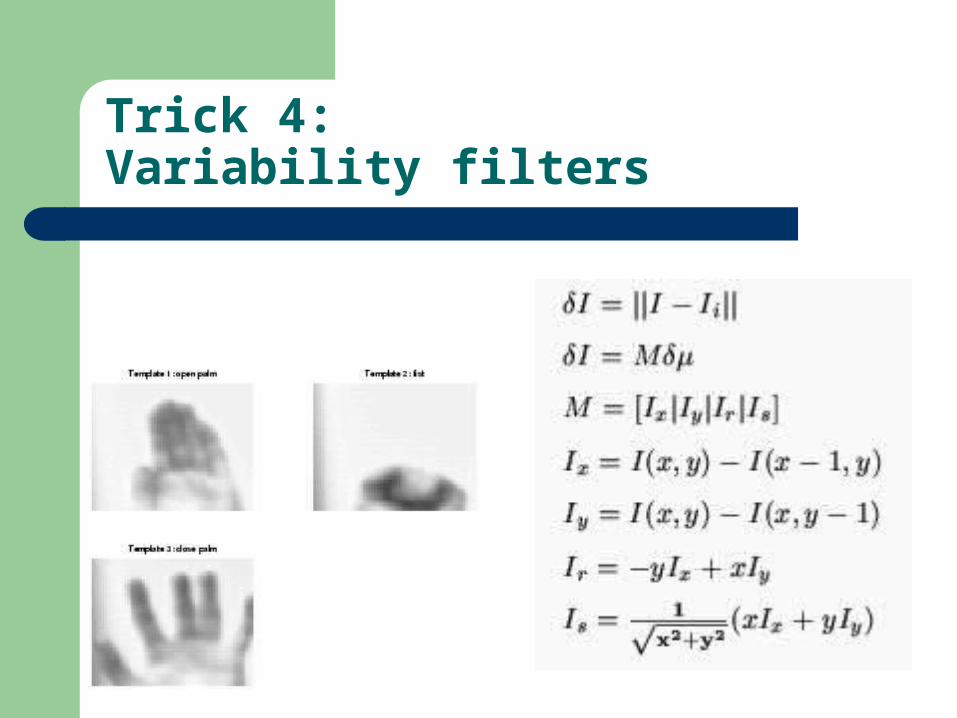
Trick 4:Variability filters

Programming by Demonstration
From assembly relations From temporal assembly sequence
– Segmenting manipulation sequence into parts (subtasks) is hard
Using a gesture language
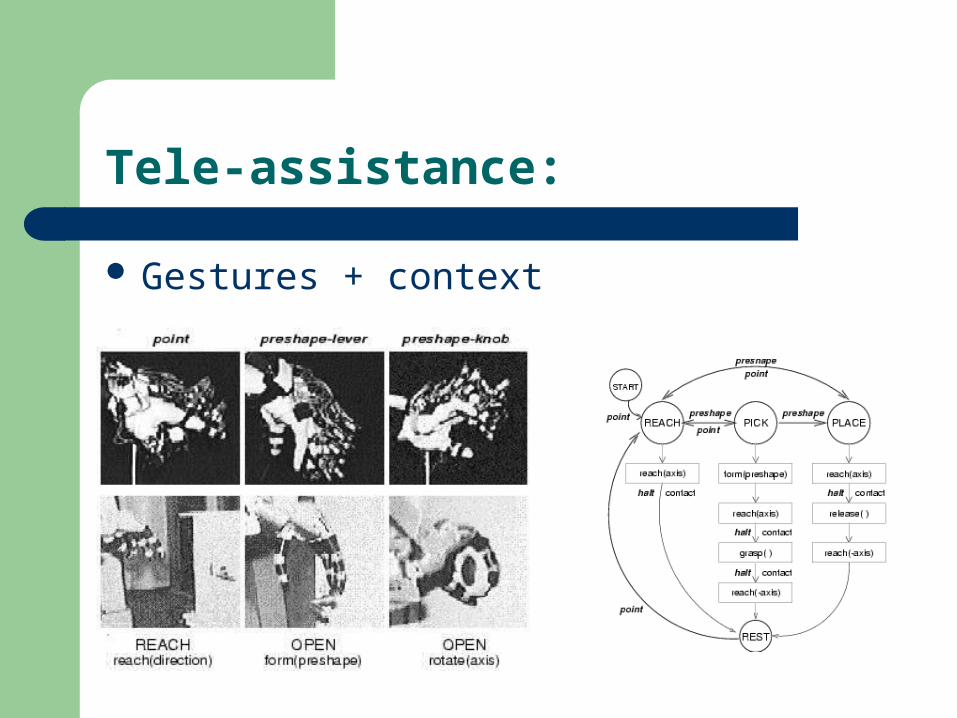
Tele-assistance:
Gestures + context
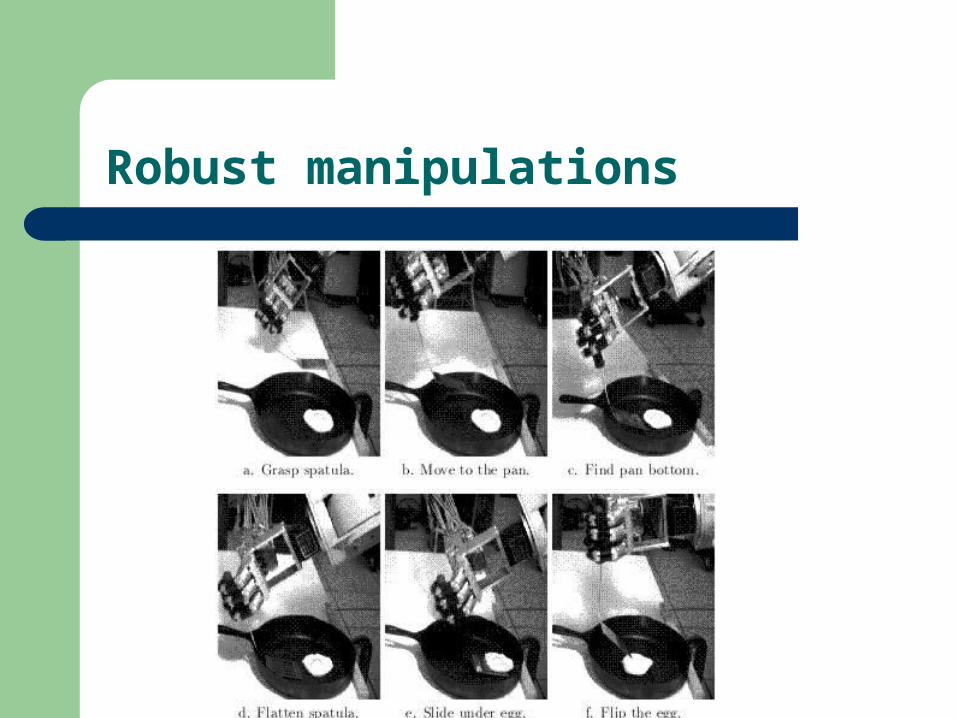
Robust manipulations

Conclusions
Most aspects of Robot see – robot do are hard Conventional methods are
– Incapable of seeing task– Incapable of understanding what’s going on– Incapable of performing human manipulation tasks
Uncalibrated methods are more promising
Related Documents











